
Abstract
Catastrophic earthquakes have struck along the East Anatolian Fault (EAF), including the 2020 Elaziğ earthquake and the 2023 Kahramanmaraş earthquake doublet. We integrated ground velocity from 2015-2020, together with co- and post-seismic deformation from the 2020 and 2023 earthquakes to investigate the fault slip evolution of the EAF, aiming to reveal the potential future seismic hazards. The spatiotemporally continuous deformation field allows us to derive complete slip distribution models throughout the earthquake cycle, including an interseismic period, two distinct postseismic periods, and three coseismic events. The results demonstrate that the slip patterns exhibit complementary characteristics across the interseismic, coseismic, and postseismic phases. Additionally, by integrating historical earthquake records with the strain accumulated and released during the observation period and quantifying the corresponding slip deficits, we evaluated the seismic potential of the EAF. Among these, the Palu segment emerged as having particularly high seismic risk, emphasizing the need for close monitoring.
Similar content being viewed by others

Introduction
The cyclic seismic behavior of fault zones, divided into interseismic, coseismic, and postseismic phases, is crucial for understanding the entire dynamic evolution of earthquakes1,2,3. The spatiotemporal evolution of surface deformation and fault slip distribution across different periods of an earthquake cycle, obtained through geodetic techniques, enable an accurate understanding of the systematics in earthquake deformation models. This, in turn, enhances the accuracy of seismic hazard assessments. Loveless and Meade4 used interseismic Global Positioning System (GPS) data to invert the subduction zone coupling distribution, revealing that the rupture areas of the 2011 Tohoku-oki earthquake largely overlapped with the interseismic coupling. Wang and Fialko5 studied the different behavior between co- and post-seismic deformation of the 2015 Gorkha earthquake, confirming that down-dip afterslip was driven by coseismic stress changes. Although it is crucial to study the full earthquake cycle, there are challenges in obtaining continuous observations that cover the entire process. One of the main difficulties is acquiring data over a sufficiently long period, as some parts of the earthquake cycle, such as the interseismic phase, can span decades or even centuries. Moreover, not all earthquakes generate observable postseismic deformation. Studies have shown that surface postseismic deformation may depend on earthquake magnitude, focal depth, and the frictional properties of fault zones6. Churchill et al.7 found that afterslip moment scales nearly linearly with earthquake magnitude. Floyd et al.8 showed that lithological variations give rise to differences in frictional properties, which largely determine the spatial distribution of co- and post-seismic slip. Moreover, distributed off-fault deformation may accommodate part of coseismic and postseismic strain, causing surface measurements to under-estimate the total slip budget across the fault9,10,11. These observational limitations hinder the establishment of a complete deformation picture of the earthquake cycle.
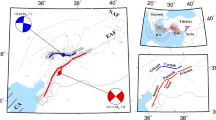
In recent years, the EAF has experienced several earthquakes—including the Mw 6.8 Elazığ earthquake on January 24, 2020, and the Kahramanmaraş earthquake doublet on February 6, 2023. This sequence coincides with geodetic observations of fault creep along the Pütürge segment12,13. Furthermore, nearly a decade of Sentinel-1 surface deformation observations fully spans this interval, capturing not only the interseismic creep but also the coseismic and postseismic deformation associated with the 2020 and 2023 earthquakes. Together, these characteristics provide exceptional conditions for investigating fault-slip behavior. We defined five distinct periods within the EAF earthquake cycle (Fig. 1e), with the 2020 Elazığ earthquake (hereafter E-1) and the 2023 Kahramanmaraş earthquake doublet (hereafter E-2) marking two key reference points. The period from March 2015 to January 2020, termed I-1, represents the interseismic period. The period from January 2020 to February 2023, referred to as P-1, marks the postseismic of E-1. The period from February 2023 to June 2024, termed P-2, marks the postseismic of E-2.

a A map of the Anatolian block. Red and blue boxes denote Sentinel-1 coverage. Black arrows show horizontal GPS velocities65. Red stars denote earthquakes. Black lines represent fault traces. The black rectangle outlines the study area in (b). b Map of the EAF. Dots and beach balls represent E-1 and E-2 (cyan from USGS, pink from GCMT, and blue from GFZ). Black solid lines represent the modeled fault traces; thin red lines mark observed surface ruptures97. The cyan GPS. Fault segment names follow Duman and Emre19. S abbreviates of segment. c Spatiotemporal distribution of historic large earthquakes21,28,45. d Slip rates derived from geodetic and geological data along the EAF14,17,19,46,64,98,99. e A timeline depicting five periods of the EAF earthquake cycle.
Numerous studies have reported secular velocities along the EAF, but systematic studies on the distribution of fault slip rates during various earthquake cycle periods are scarce13,14,15,16,17. GPS and Interferometric Synthetic Aperture Radar (InSAR) studies indicate that the current slip rates along the EAF generally decrease from northeast to southwest, ranging from ~10 mm yr−1 near the Karlıova triple junction (KTJ) in the northeast to ~4 mm yr−1 near Türkoglu and further decreasing to ~1 mm yr−1 near Kirikhan14,15,16,18 (Fig. 1d). Geological indicators suggest a slip rate of ~2 mm yr−1 on the Sürgü-Çardak fault19. Çakir et al.13 provided quantitative analysis into the interseismic, coseismic, and postseismic behavior of the Elaziğ earthquake, focusing specifically on the Pütürge segment. These studies have mainly focused on interseismic velocity estimation or detailed analyses of specific fault segments, leaving gaps in understanding interactions between different segments and time periods. Furthermore, while the mechanics of E-1 and E-2 have been well documented20,21,22,23,24,25,26, postseismic deformation across the EAF remains insufficiently constrained by observations, and the slip evolution involving both coseismic and postseismic is still not well quantified. To address these, it is essential to establish a comprehensive picture of the slip evolution and its variations among each segment of the EAF.
Results
Surface deformation fields across five periods
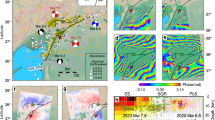
We present five periods of surface deformation or velocity fields along the EAF, derived from ascending (ASC) and descending (DSC) tracks (Fig. 2 and Supplementary Fig. S1). During I-1, the line-of-sight (LOS) surface velocity fields clearly reveal the ongoing tectonic deformation (Fig. 2a). The left-lateral strike-slip motion of the EAF produces surface deformation that, when projected onto the LOS direction of the ASC and DSC tracks, manifests as opposite displacement directions on the two sides of the fault. We compared our velocity field with that of Weiss et al.15 and found overall good consistency (Supplementary Fig. S2). Discrepancies likely arise from differences in GPS reference data, InSAR processing strategies, and spatial resolution. While Weiss et al.15 analyzed the entire Anatolian block at 1 km resolution, our study targets the EAF with a finer 90 m resolution, enabling more detailed mapping of localized deformation.

a Interseismic velocity maps. The purple triangle represents the reference pixel for the InSAR result; colored dots show GPS LOS velocities. b Coseismic interferometric phase maps of E-1. c Postseismic cumulative deformation maps of E-1. d Coseismic interferometric phase maps of E-2. e Coseismic SAR offsets of E-2. f Postseismic cumulative deformation maps of E-2. g, h represent the displacement time series for P-1 and P-2, respectively. Locations Q1-Q4 are marked in (c) and (f).
E-1 produced a maximum surface displacement exceeding 20 cm, yet no surface rupture was observed23,24. The interferogram delineates two principal deformation zones, with the elastic response of the medium concentrated within a 60 × 40 km area (Fig. 2b). The cumulative LOS deformation over approximately a 3-year period following E-1 (Fig. 2c) extends asymmetrically beyond the coseismic deformation field (outlined by magenta contours in Fig. 2c), with the primary deformation concentrated near the epicenter and approximately 15 km to its southwest. Over approximately a 3-year period, cumulative surface displacement reached approximately 6 cm, representing 25–30% of the maximum coseismic displacement.
The coseismic interferogram of E-2 shows a large area of discontinuity due to the pronounced deformation gradient around the fault (Fig. 2d). In contrast, the deformation field derived from the SAR pixel offset accurately reflects the near-field deformation (Fig. 2e). The overall distribution of cumulative LOS surface displacement during the first 1.37 years following E-2 (Fig. 2f) highlights the nonuniform deformation pattern, characterized by varying displacement amplitudes on the same side of the EAF.
Interseismic fault slip velocity between 2015 and 2020 (I-1)
We estimated the slip rate distribution during the I-1 period based on the InSAR velocity fields. The standard deviations (STD) of the model parameters obtained through bootstrapping (Methods) are mostly below 1.5 mm yr−1 (Supplementary Fig. S3), indicating consistent constraints of the current InSAR deformation velocity field on fault model parameters. Using the optimal slip model, we forward-modeled InSAR velocities and computed residuals between the simulated and observed fields (Supplementary Fig. S4). The residuals follow a normal distribution, confirming that the optimal model effectively captures the primary tectonic deformation signals. Residual maps show localized short-wavelength noise, likely related to DEM errors or minor non-tectonic deformation.
The interseismic slip rate distribution (Fig. 3) highlights spatial heterogeneity along the fault plane. In the Palu and Pütürge segments, slip rates are relatively high (10–15 mm yr−1), whereas they decrease markedly westward, dropping to less than 5 mm yr−1. This pronounced east-west gradient may reflect changes in the geometry of the plate boundary. Güvercin et al.27 emphasized that spatial slip rate variations reflect fault geometry and strain partitioning, with the Palu-Pütürge segment forming a narrow, well-defined strike-slip fault, and the boundary west of Çelikhan broadening into multiple subparallel strands.

a, b Geometry of the shallow (<30 km) and deep (>30 km) dislocation models. (a1–a4) The inverted I-1 shallow slip rate distribution. (b1–b4) The inverted I-1 deep slip rate distribution. Green, blue, and black stars denote, respectively, the epicenter of E-1, E-2, and historical earthquakes.
The seismogenic section (above 30 km) of the F1 branch can be divided into three creeping regions with slip rates >5 mm yr−1 (Fig. 3a1). C1 lies on the southwestern Palu segment, partially overlapping the 1874 M 7.1 rupture, with slip rates of 7.5–11.5 mm yr−1 (Fig. 3a1) in the seismogenic layer and ~8.5 mm yr−1 at depth (Fig. 3b1). C2 spans the Pütürge segment, coinciding with the 1893 M 7.1 and 1905 M 6.8 ruptures, and shows shallow creep with seismogenic slip rates of 7–20 mm yr−1 and a corresponding long-term slip rate of 7 mm yr−1 (Fig. 3b1). C3 corresponds to the rupture zone of the 1822 M 7.5 earthquake19,28, where the slip rate within the seismogenic layer is estimated at 4–9 mm yr−1, and the long-term slip rate is approximately 2 mm yr−1 (Fig. 3b1). The partial overlap between these creeping zones and historical ruptures, together with slip rates exceeding the plate velocity, suggests a combination of interseismic creep and long-term postseismic deformation. To further explore the relationship between shallow and the long-term slip rate, we computed spatially variable interseismic coupling (ISC)29 (Supplementary Note S1). High ISC values cluster on the Erkenek and Pazarcık segments of the F1 branch and the eastern F3 branch (Supplementary Fig. S5).
Co- and post-seismic fault slip induced by the 2020 Elaziğ earthquake (E-1 and P-1)
The coseismic model was constructed using a triangular dislocation elements (TDEs) model (Methods). Our preferred model (Fig. 4a, Supplementary Figs. S6 and S7a) shows that the coseismic slip distribution of E-1 is concentrated at depths of 3–15 km, with a maximum slip of approximately 2 m. The total released moment is 2.48 × 1019 N·m (Mw 6.89). The model uncertainties are mostly below 3 cm (Supplementary Fig. S8a). The residuals between the observation and the model follow a normal distribution (Supplementary Fig. S9). Based on the L-curve analysis (Supplementary Fig. S6), we conducted two comparative tests: an under-smoothed model and an over-smoothed model (Supplementary Fig. S10). The main slip characteristics are reliable despite varying smoothing values.

a Coseismic slip distribution. b Cumulative afterslip distribution.
Our afterslip model over approximately a 3-year period shows that the maximum afterslip for P-1 is approximately 48 cm (Fig. 4b and Supplementary Fig. S7b). The total seismic moment released by the afterslip of E-1 is 6.19 × 1018 N·m (Mw 6.49). The derived slip model, which includes shallow afterslip above a depth of 2 km (Supplementary Fig. S7b), corroborates the earlier findings of Çakir et al.13. Furthermore, model uncertainty tests confirm the robustness of these results (Supplementary Figs. S8b and S11).
Co- and post-seismic fault slip induced by the 2023 Kahramanmaraş earthquake doublet (E-2 and P-2)
The coseismic slip distribution of E-2 was inverted from InSAR and GPS data (Methods). Slip is predominantly concentrated at depths of 0–20 km (Fig. 5a1 and Supplementary Fig. S12), with multiple high-slip patches along the F1 branch. The largest slip (~8.8 m) occurs on the Pazarcık segment, consistent with previous estimates (~8 m by Barbot et al.; ~9 m by Guo et al.30,31. The second Mw 7.6 earthquake occurred along an S-shaped curve; its westward propagation ceased at a fault bifurcation where the slip rapidly decreased from the ruptured section and distributed along the two bifurcated faults32,33. On the F3 branch, pronounced slip is also observed in the Sürgü-Çardak segment, consistent with the localized high-slip patch identified by Zhang et al.33. The total released moment is estimated at 1.02 × 1021 N·m (Mw 7.97).

(a1–a2) and (b1–b2) illustrate the coseismic slip and cumulative afterslip, respectively, from different perspectives.
The small deformation residuals and model uncertainties (Supplementary Figs. S13, S14 and S15) support the reliability of the slip distribution. Residuals from the offset-based inversion remain relatively large (Supplementary Fig. S14), mainly because SAR offset has a theoretical precision of only ~1/10-1/20 of a pixel, leading to lower resolution and higher noise compared with phase-based InSAR. In addition, the use of an elastic half-space approximation and simplified fault geometry contributes to systematic misfits34. The inverted coseismic displacements fit well with GPS observations (Supplementary Fig. S16). We illustrated two cases for comparison: an under-smoothed model and an over-smoothed model (Supplementary Fig. S17), which consistently reveal robust slip patterns despite variations in smoothing values.
We modeled the cumulative afterslip of P-2 and identified six primary slip regions (Fig. 5b1–b2 and Supplementary Fig. S18). These afterslip patches occurred at different depths along the EAF, with no apparent systematic depth dependence. Regions 1, 2, and 3 are located at a 5–20 km depth on the F1 branch. Region 4 is located near the epicenter of the 2023 Mw 7.8 earthquake. Regions 5 and 6 are located at a 3–25 km depth on the F3 branch. The estimated seismic moment release by the afterslip is 8.3 × 1019 N·m (Mw 7.25). The model uncertainties and deformation residuals are shown in Supplementary Figs. S15 and S19.
Slip complementarity and deficit among interseismic, coseismic, and postseismic periods
Understanding slip complementarity is fundamental for interpretating fault mechanical behavior and seismic potential35. In addition, quantifying the contributions of different slip phases is crucial for addressing the shallow slip deficit (SSD) problem13,36. The slip distributions over the five periods (Fig. 6a1–a4) provide information on the slip complementarity over time. In addition, the total slip budget provides information on the remaining slip deficit in certain areas, acknowledging that the initial state of slip heterogeneity on the fault plane is not precisely known. Here we summarize their characteristics in chronological order. Period I-1’s slip model indicates that the F1 branch might reflect the slip partition along the EAF (black contours in Fig. 6a1). The slip distribution of E-1 exhibits a pronounced SSD within the depth range of 0–5 km (Fig 6b1). Period P-1’s slip distribution (green contours in Fig. 6a1) is primarily concentrated at shallow depths (0–7 km) and extends along the south-west and north-east ends of the E-1 fault. The postseismic slip primarily occurs in regions where coseismic slip is small, featuring two localized slip patches that spatially complement the coseismic slip (Fig. 6a1).

(a1-a4) Spatiotemporal evolution of fault slip on the four branches. Black contours show interseismic slip; green and purple contours denote cumulative afterslip from E-1 and E-2, respectively. Cyan dashed lines outline accumulated slip. The blue star is the epicenter of E-1. Green stars are epicenters of E-2. (b1–b4) Integral of slip along strike for each point at the same depth for the four branches, with associated error bars. (c1–c4) Integral of slip along depth for each point at the same strike for the four branches, with associated error bars. Uncertainties are estimated for each period by the bootstrap method (see Methods and Supplementary Figs. S3, S8, S15).
E-2 nucleated on the F2 branch (the Narlı fault), which exhibits negligible interseismic slip rates. The Narlı fault lies within a releasing bend, marked by a strike change from NE-SW to NNE-SSW along the Pazarcık segment37. This geometry induces local transtension, lowering effective normal stress and increasing shear stress on the Narlı fault, thereby creating conditions favorable for rupture initiation37. The complementary relationship in slip is evident from the integrated down-dip slip for each fault branch (Fig. 6b1–b4). Unlike E-1, none of the four branches of E-2 exhibit a noticeable SSD (Fig. 6b1–b4). The lack of SSD may be attributed to the difference in earthquake magnitude, consistent with Antoine et al., who demonstrated a negative correlation between SSD and earthquake magnitude9. P-2’s slip distribution is concentrated down-dip of the E-2 rupture (Fig. 6a). The complementary relationship in slip can also be observed by integrating slip with depth at each along-strike position for the four fault branches (Fig. 6c1–c4).
The above results enable us to investigate the overall slip deficit across the fault plane. We estimated the total slip by summing the observed slip accumulated during the entire monitoring period (Fig. 1e). Then, we determined the normalized along-strike slip on the EAF, which is defined as the slip of each patch on a fault branch divided by the maximum slip on that branch (Fig. 7a1–a4). The results reveal that, within the observation period, the fault is characterized by a patchwork of high-slip areas and slip deficit zones. Although such spatial heterogeneity may reflect localized stress variations and potentially influence the rupture style of future events, previous studies have reported cases in which complex rupture events may be followed by relatively simple earthquakes that partially redistributed the stress heterogeneities on the fault plane38. We identified three regions of slip deficits (Fig. 7a1), with S1 on the Amanos segment, S2 on the Pütürge segment, and S3 on the Palu segment. The SSD between the Pütürge and Palu segments lies above the rupture zone of E-1. Along the Palu segment, the entire area exhibits a slip deficit at both shallow and deeper depths. Historical seismicity since 1870 is limited, with only the 1874 M 7.1 and 1875 M 6.7 earthquakes rupturing near Palu, and the 1905 M 6.8 event rupturing part of the Pütürge segment. Although E-1 released strain along ~50 km of this zone, a substantial slip deficit remains. Given the 150-year period of predominantly seismic silence and incomplete ruptures, the ~200 km segment between Pütürge and Palu has likely accumulated substantial strain, elevating the potential for a future large-scale rupture. For the Palu segment, the empirical scaling relation suggests that the 1874 M 7.1 earthquake likely produced an average fault slip of ~1.6 m39. Considering a slip rate of ~10 mm yr−1 for this segment (Fig. 1d), the fault may have accumulated ~1.5 m since 1874, implying that the accumulated strain may already be approaching the threshold for another large rupture. Furthermore, the Palu segment lies within the faster-slipping eastern portion of the EAF, suggesting shorter potential recurrence intervals and therefore elevated seismic hazard.

(a1) F1 branch, (a2) F2 branch, (a3) F3 branch and (a4) F4 branch. (b1) Fault model GBI. (b2-b3) Along-strike cumulative slip (black) and mean GBI for the F1 and F3 branches, respectively.
To explore the role of fault geometry complexities in governing slip complementarity, we calculated the fault model geometrical bend index (GBI) (see Methods). In this study, the GBI is derived directly from the fault model surface traces and represents only the along-strike curvature and bending of the fault (Fig. 7b1). Figure 7b2, b3 compares the cumulative down-dip slip and the average GBI at different positions. The comparison reveals that the main slip patch on the F1 branch is bounded by three zones of high GBI (Fig. 7b2), indicating that fault bends play a critical role in inhibiting rupture propagation. Specifically, slip decreases across these high-curvature segments, demonstrating that geometric complexities control spatial patterns of coseismic slip and rupture termination. We further examined the relationship between the Coulomb Failure Stress change (ΔCFS) and the GBI (Supplementary Note S2 and Fig. S20). Despite negative ΔCFS on the Pütürge segment, afterslip still developed there, indicating that geometric fault bends influence the spatial partitioning between coseismic and postseismic slip.
Fault slip evolution and frictional properties
The fault slip evolution (Fig. 8a) was derived from the inversion of InSAR time series. We extracted fault patches A1-A8 from areas of the maximum coseismic slip of E-1, the maximum afterslip of P-1, and areas R1-R6 (Fig. 5). Supplementary Table S1 lists the slip velocity and the cumulative displacement. Major steps in the cumulative slip distribution correspond to the two large events (E-1 and E-2). During periods P-1 and P-2, the fault slip rates showed logarithmic decay with time. Afterslip at patch A1 (during P-1) ceased within 1 year of E-1. In contrast, patches A3, A7, and A8 (during P-2) sustained afterslip for over 1.37 years following E-2, while slip at other patches decayed rapidly. These prolonged afterslip and variable decay patterns highlight heterogeneous frictional properties along the fault.

a Left-lateral slip time series at eight fault patches from March 2015 to June 2024. The two red vertical lines represent the times of E-1 and E-2. b, c The distribution of the (a, b) parameter from different directions. The green star is the epicenter of E-1. Blue stars are epicenters of E-2. d Fitting results of afterslip on fault patches A1-A8 following E-2 based on inverted frictional parameters.
According to rate-and-state friction theory, afterslip occurs primarily on velocity-strengthening (VS, a-b > 0) fault patches, facilitating stable, aseismic strain release7. We estimated the distribution of the frictional parameter (a-b) from the temporal evolution of the afterslip of E-2. The obtained friction parameters mostly range from 10−5 to 10−2 (Fig. 8c) and fall within the typical range for phyllosilicate-rich rocks40. Such phyllosilicates are widely present in crustal fault zones and may form through mechanical comminution of mica-bearing schists40. Along the Pütürge segment, the surrounding mica-schists likely supply VS phyllosilicates13. This suggests that the up-dip region, which hosted prolonged afterslip, is likely composed of such VS materials responding to coseismic stress changes. The reliability of these inferred (a-b) values is supported by their successful application in modeling the afterslip time series at patches A1-A8 (Fig. 8d), where the observed data (dots) show good agreement with the model predictions (solid lines). These results imply that the shallow, VS segments of the fault will continue to accommodate plate motion through aseismic creep, thereby influencing the stress evolution and seismic potential of adjacent locked segments.
Earthquake potential along the EAF
Palaeoseismological evidence suggests that the Pazarcık segment is capable of generating large earthquakes19, a potential confirmed by the E-2 rupture. However, quantitative and up-to-date (post-E2) assessments of the earthquake potential of the EAF are lacking. To address this, we calculated moment rate deficit (MRD, \(\dot{{M}_{0}}\), Eq. 6)41 using the interseismic slip rate distributions in Fig. 3. MRD along the EAF exhibits spatial heterogeneity (Fig. 9c). The lowest MRD occurs at E-1’s epicenter, implying minimal strain accumulation during 2015.03-2020.01, consistent with a creeping mechanism.

a Fault segments and historical earthquakes. Black beach balls indicate the earthquakes since 2020, while red stars indicate historical earthquakes. b Approximate rupture extents and timing of the most recent major earthquakes for each segment. c Present-day MRD. d Cumulative seismic moment since the last major earthquake (solid lines). Seismic moment released by E-1 or E-2 on each segment is shown by black dashed lines.
To translate the above geodetic deficits into seismic hazard parameters, we estimated recurrence intervals by combining our MRD values with the magnitudes (Mw) of historical earthquakes41,42. This is different from previous studies utilizing historical earthquake catalog analysis27,32,43, and is intended as a first-order, illustrative exercise. It assumes segment-wide events of similar magnitude to the most recent major rupture. In reality, recurrence times would be modulated if a given segment ruptures in smaller, more frequent events or, conversely, as part of a larger multi-segment rupture. Accordingly, the return times we report should be viewed as maximum-scenario estimates under the constant-magnitude assumption. With these caveats, we estimate the recurrence interval (\({T}_{n}-{T}_{l}\)) in Eq. (7).
We identified the most recent large ruptures on each segment from previous studies19,20,21,28,44 (Fig. 9b). Historical records for the Sürgü-Çardak segment are extremely scarce. Only a single event in 1544 can be attributed to a partial rupture of the Çardak fault (~M 6.7)45. However, this magnitude is smaller than the Mw 7.6 released during E-2. This disparity underscores that rupture extent can markedly alter event magnitude. We adopt Mw 7.6 as the maximum-credible, segment-spanning rupture scenario for the Sürgü-Çardak segment. Based on this framework, the estimated recurrence intervals are as follows: Amanos segment (1028–1721 yr), Pazarcık segment (420–473 yr), Erkenek segment (114–131 yr), Pütürge segment (194–396 yr), Palu segment (140–197 yr), and Sürgü-Çardak segment (602–691 yr). These estimates partly overlap with results from previous paleoseismological and geological studies27,43. For example, our estimate for the Pütürge segment (194–396 yr) partially overlaps with the 100–230 yr range of Güvercin et al.27, who derived their estimate using an assumed maximum magnitude of 6.8–7.0. The lower bound of our estimate is consistent with the ~190-yr interval inferred from lake turbidite records43. The differences among these estimates primarily arise from the distinct model assumptions. Our Palu segment interval (140–197 yr) falls between the 108–228 yr range of Güvercin et al.27 and the 100–360 yr range of Çetin et al.46. However, most segments are constrained by only a single well-documented historical rupture, and thus the inferred recurrence intervals may not fully capture the temporal variability of fault slip behavior. For example, our estimated recurrence interval for the Sürgü-Çardak segment (602–691 yr) is shorter than the millennial-scale intervals inferred from paleoseismic trenching and sedimentary analyses. Not only does this stem from uncertainties inherent in historical earthquake catalogs47 but it also reflects the intrinsic variability of the earthquake cycle, including temporal clustering and irregular rupture behavior38. Nevertheless, recurrence intervals inferred from geodetic data provide an independent and critical basis for assessing the seismic hazard along the EAF.
We then estimated the accumulated seismic moment on each segment by assuming that the most recent historical earthquake fully released the moment accumulated over one earthquake cycle (Fig. 9b). Starting from these events, we calculated the moment accumulation rate via Eq. (6) and multiplied it by the elapsed time up to E-2. For the Pütürge segment, which ruptured during the 2020 E-1 event, accumulation was evaluated over 1905–2020. Results of each segments show accumulated seismic moment equivalent to Mw 6.9 (Amanos, 1822-2023), Mw 7.46 (Pazarcık, 1513-2023), Mw 7.14 (Erkenek, 1893-2023), Mw 7.07 (Palu, 1874-2023), and Mw 7.53 (Sürgü-Çardak, 1544-2023) (black solid lines in Fig. 9d). The observed seismic moment released by E-2 on the Amanos, Pazarcık, Erkenek, and Sürgü-Çardak segments are Mw 7.58, Mw 7.63, Mw 7.35, and Mw 7.68 respectively (black dashed lines in Fig. 9d). Green and pink shading denote over-ruptured and under-ruptured areas, respectively, based on the difference between observed and modeled seismic moment. This indicates that E-2 fully released the accumulated seismic moment of the ruptured fault segments, consistent with Vavra et al.48. For the Pütürge segment, the estimated accumulated moment (1.07 ± 0.54 × 10¹⁹ N·m, ~Mw 6.66) is lower than that released in the E-1 event (Mw 6.89), implying that the 1905 event may have been an incomplete rupture. This interpretation, supported by Ragon et al.21, implies the segment may host larger future events.
Discussion
Fault creep within the seismogenic zone on the Pütürge segment
Our interseismic slip rate distributions confirm previous findings that a creeping zone exists on the Pütürge segment (C2 in Fig. 3a1), with the creeping depth spanning almost the entire seismogenic layer, exhibiting slip rates ranging from a few mm yr−1 at deeper depths (~20 km) to 2 cm yr−1 at shallower depths (~5 km). Konca et al.49 identified multiple long- and short-term clusters of near-repeating earthquakes beneath the eastern end of the 2020 coseismic rupture, indicating that slip on small, strongly coupled asperities within the creeping zone actively released part of the accumulated moment and could have nucleated moderate earthquakes such as E-1. These observations suggest that the creeping zone cannot be regarded as a permanent rupture barrier. As highlighted by Chen and Bürgmann50, creep may reduce—but does not preclude—rupture propagation when stress transfer or frictional mode switching enables seismic slip across otherwise aseismic segments.
E-1 partially ruptured a fault section characterized by diffuse seismicity and heterogeneous coupling, encompassing creeping and partially locked patches49. In map view (Fig. 6a1), the coseismic rupture mainly occurred west of the maximum creep zone, with partial spatial overlap between the two. Konca et al.49 further showed that the rupture initiated adjacent to a creeping area and propagated unilaterally southwestward, while the northeastern portion of the Pütürge segment remained weakly coupled, thus preventing rupture propagation to the northeast. Çakır et al.13 reported that creep in the western part of the Pütürge segment is relatively shallow, whereas in the east it extends deeper. The 2020 rupture nucleated at ~12 km depth, reached maximum coseismic slip in the shallow crust, and overlapped with interseismic creep13. This localized overlap between creep and coseismic slip may reflect three mechanisms: (i) heterogeneous coupling, whereby small locked asperities embedded within creeping zones accumulate stress and eventually fail during earthquakes; (ii) geometric complexities such as fault bends that locally concentrate stress and facilitating rupture propagation into creeping areas; (iii) non-stationary frictional behavior, in which the friction parameter (a-b) varies markedly with slip rate, making shallow creeping zones susceptible to slow instabilities51,52. A creeping fault can slip during an earthquake if stressed enough53,54. Moreover, shallow creeping segments may also be activated when transient stress or changes in frictional regime induce dynamic weakening9,55.
In the P-1 phase, the cumulative afterslip moment over approximately 3 years is about 25% of the coseismic moment. This highlights the important role of afterslip in the overall strain release. Previous studies indicate that the shallow portion of the seismogenic fault zone involved in E-1 is composed of weakly cemented phyllosilicate-rich rocks13,23. Such lithological conditions are conducive to stable aseismic slip. Overall, the nucleation, rupture, and subsequent evolution of earthquakes on the Pütürge segment are likely jointly modulated by heterogeneous coupling and the failure of small locked asperities within the creeping zone. These findings highlight the necessity of continuous monitoring efforts.
Slip evolution reveals heterogeneous fault frictional strength
The (a-b) parameter exhibits a systematic depth-dependent variation (Fig. 8b). In the shallow crust (0–2 km), (a-b) parameter is relatively high. This depth-dependent pattern aligns with current understanding of seismogenic fault structures, in which the shallow portions of faults (~2 km) are generally VS domains56. However, under specific stress conditions—such as elevated shear stress or increased pore fluid pressure—even shallow VS zones (0–2 km) can become dynamically weakened and undergo ruptures57,58. For instance, E-2 involved rupture propagation through the uppermost 0–2 km of the crust. Similarly, the deeper portions of faults (>20 km) generally exhibit velocity-neutral or VS behavior, which inhibits seismic rupture and makes these regions prone to aseismic afterslip59,60. However, studies show that under high-stress conditions, coseismic ruptures can propagate into these typically stable, deeper crustal regions33,61. Furthermore, Bruhat et al.62 demonstrated that at greater depths and over longer timescales, the dominant postseismic deformation mechanism may progressively shift from afterslip on VS materials to viscoelastic relaxation within the lower crust or upper mantle. However, our checkerboard tests (Supplementary Fig. S21) reveal elevated uncertainties at depths greater than ~20 km; therefore, the results in this depth range are only weakly constrained.
Lithological variations along strike may likewise influence the frictional behavior and slip variability of the EAF. For example, the Palu and Pütürge segments are primarily composed of phyllosilicate-rich rocks13, where Paleozoic mica-schist may generate VS fault gouge and thus promote shallow creep13,19,63. Local bedrock of the Sürgü-Çardak segment consists of serpentinite47,63, which may indicate stable creep behavior along this portion of the fault. In addition, Bletery et al.64 suggest that the most uncoupled shallow portion of the EAF is located near the Pütürge segment, where a large reservoir provides fluids to the shallow part of the fault and possibly weakens its mechanical friction, promoting aseismic slip (see Fig. 3a1, C2). These insights are critical for modeling earthquake cycles, as they highlight how frictional variability influences stress accumulation, fault slip behavior, and seismic hazard across different fault segments.
Methods
Data summary
This study utilizes all available Sentinel-1 SAR images collected from three ASC tracks (014, 116, and 043) and two DSC tracks (021 and 123), covering a period of ~10 years from March 2015 to June 2024 (Fig. 1a and Supplementary Table S2). The interseismic GPS velocity field is derived from the study by Kurt et al.65, whose results to date exhibit higher spatial and temporal resolution and improved spatial homogeneity. The coseismic GPS data are provided by the Nevada Geodetic Laboratory. The historical earthquake used in this study comes from the AFAD catalog (https://deprem.afad.gov.tr/event-catalog) and a literature review18,19,23,27. Aftershock data for E-1 comes from the AFAD catalog, while aftershock data for E-2 comes from Ding et al.66.
Coseismic deformation interferograms
We obtained the E-1 (Fig. 1e) coseismic deformation field from two ASC (043 and 116) and one DSC (123) tracks. For E-2 (Fig. 1e) coseismic deformation field, we utilized three tracks, comprising two ASC tracks (014, 116) and one DSC track (021). We used the GAMMA software to generate coseismic interferograms based on phase measurements by incorporating the European Space Agency’s restituted precise orbit data. Topographic phases were simulated and removed using a ~90 m COP-DEM (https://doi.org/10.5270/ESA-c5d3d65). To improve the coherence, all the interferograms were multi-looked by factors of 20 in range and 6 in azimuth, and filtered using the Goldstein filter67,68. Each interferogram was unwrapped using a minimum cost flow (MCF) algorithm69. The unwrapped phase maps were then transformed into displacement maps in the LOS direction and geocoded into the WGS-84 coordinate system.
Coseismic deformation offsets
Unlike E-1, the rupture of E-2 initiated at depth but propagated to the Earth’s surface, generating extensive, essentially linear surface fractures. To compensate for the incoherence of the InSAR deformation field near the fault, we employed the SAR offset technique along the range direction to characterize the near-field deformation information70,71. Offsets along the azimuth direction were discarded due to the high noise level. SAR offsets were calculated between image patches of two SAR images using a normalized cross-correlation algorithm based on the intensity information70. We used a window size of 300 × 60 pixels (~900 × 900 m) to calculate the cross-correlation function, and the offset was estimated for every 20 range and 6 azimuth pixels to ensure a pixel spacing of ~90 m71. A median filter (8 × 8) was applied to further reduce noise. The spatial distribution of the offset map recovers ground deformation of large spatial gradients at an accuracy of ~0.1 m for Sentinel-171.
Time series analysis
For each track, we co-registered all SAR images to the reference acquisition at the center of the network. To ensure coherence and accuracy, we generated the interferogram network consisting of short-term and 1-year interferograms to perform time series analysis. The short-term interferograms consist of all possible interferograms with a temporal baseline of less than 90 days. To minimize phase bias in the short-term interferograms, we produced 1-year interferograms with a temporal baseline of 365–405 days72. We manually checked each interferogram (Supplementary Fig. S22), retaining those with a good signal-to-noise ratio (SNR). To reduce atmospheric phase effects correlated with the terrain, we estimated and removed atmospheric noise from all the interferograms using the GACOS system (http://www.gacos.net/)73, which has been effectively applied to deformation studies at various periods of the earthquake cycle15,74,75. On average, the STD of each track were reduced by 23–36% after applying the GACOS correction (Supplementary Fig. S23), indicating a considerable reduction in atmospheric noise. We used the TS-GACOS-APS algorithm combined with a weighted least squares approach to estimate displacement time series, generating interseismic LOS velocity and cumulative postseismic LOS displacement time series74. To address potential gaps in the small baseline network caused by severe decorrelation or long intervals without acquisitions during time series analysis, we introduced temporal deformation constraints: a linear time model for interseismic periods65,76 and a logarithmic time model for postseismic periods74,77. Additionally, the phase closure difference method was applied to detect phase unwrapping errors78. The initial LOS displacement field is relative to a stable pixel for each track.
To better combine ASC and DSC tracks, we assigned the same reference pixel (37.74°N, 37.83°E) in ASC 116 and DSC 021 during data processing. For the interseismic deformation field, given that both orbital errors and interseismic signals exhibit long-wavelength spatial characteristics, conventional polynomial orbital models are insufficient to effectively separate the two. To accurately decouple the spatially correlated interseismic deformation and orbital errors, we adopted a “removal and recovery” approach76. First, the 3D GPS velocity field provided by Kurt et al.65 was interpolated and projected into the LOS direction77 to construct an initial deformation model. This initial model was then subtracted from the InSAR-derived interseismic velocity field to obtain the residual signals, which were subsequently filtered using a Gaussian high-pass filter. Finally, the initial deformation model was added back to the filtered residuals to obtain the final interseismic velocity field. To validate the accuracy of the interseismic results, the LOS-projected GPS velocities within the InSAR coverage area were compared with the InSAR-derived interseismic velocities (Supplementary Figs. S24a, S24b). For the ASC track, the correlation coefficient between GPS and InSAR velocities is 0.75 with an RMS of 1.4 mm yr−1; for the DSC track, the correlation coefficient is 0.8 with an RMS of 1.1 mm yr−1, indicating that the interseismic InSAR velocity field is of high accuracy. Statistical analysis shows that the velocity differences in the overlapping pixels are normally distributed, with a STD of 1.4 mm yr−1 between adjacent tracks in I-1 (Supplementary Figs. S24c–S24e). For the postseismic deformation field, we integrated the deformation fields of adjacent tracks by calculating offsets between the means of their overlapping regions, following the method of Fattahi and Amelung79. To assess the uncertainty in the final ASC and DSC LOS displacement maps, we analyzed deformation discrepancies in overlapping regions of P-2 period (Supplementary Figs. S24f–S24h). Statistical analysis indicates that the deformation differences within overlapping pixels follow a normal distribution. The STD of deformation differences between adjacent tracks in P-2 does not exceed 1.2 cm.
Fault geometry
We identified the fault surface traces of the EAF by analyzing maximum InSAR displacement gradients from the interseismic velocity field (Fig. 2a and Supplementary Fig. S1a) and coseismic SAR offsets of E-2 (Fig. 2e and Supplementary Figs. S1d3–d4) in conjunction with the GEM database (https://blogs.openquake.org/hazard/global-active-fault-viewer/). Figure 2a depicts the inferred fault surface traces, highlighting four branches. They are F1 and F2, which ruptured during E-1 and the initial Mw 7.8 event in E-2, and F3 and F4, which ruptured during the second Mw 7.6 event in E-2. Each branch exhibits distinct curvature, with a notable emphasis on the S-shaped curve of the F3 branch, potentially influencing fault slip propagation and stress interactions. Furthermore, the variability in fault’s strike challenges effective parameterization using rectangular elements. Therefore, we used TDEs in an elastic half-space to better simulate complex fault ruptures and minimize geometric overlap or discontinuity of elements80,81.
Coseismic modeling
To model coseismic deformation, we employed a curved fault model composed of elastic half-space TDEs extending from the Earth’s surface to a depth of 30 km82. First, we sampled vertices horizontally at the Earth’s surface with a spacing of ~3 km, following exactly the fault surface traces obtained in the previous section. These vertices were held fixed in the following steps. Second, we sampled vertices vertically along the fault’s dip at depth. The location of each vertex at depth was determined by extending along the dip direction of its closest vertex at the Earth’s surface. The vertices at depth were sampled with a spacing of ~2 km along the vertical direction at shallow depths (0–15 km) and ~4 km at bottom layers (>15 km). The horizontal sampling space was slightly increased from ~3 km at the Earth’s surface to ~5 km at a depth of 30 km. Third, we used the Triangular Irregular Networks (TIN) method to connect all the vertices generated in the above two steps to form a triangular dislocation model80. These steps were implemented simultaneously for the four fault branches. The dip angle of the F1 branch was set at 85°, while the other branches were fixed at 70°, based on the studies by Jia et al.61 and He et al.83. Specifically, Jia et al. referred to precisely located aftershocks, whereas He et al. employed a grid search method to explore the optimal dip angle61,83.
Checkerboard test and fault model geometrical bend index
To assess whether the model has sufficient resolution to reliably distinguish slip on these adjacent fault segments, we performed a checkerboard test. In this test, various fault patches were assigned a 3 m left-lateral slip to generate synthetic observations, to which Gaussian noise with a variance of 0.1 m was added. The inversion was then repeated 100 times, and the averaged slip distribution is presented in Supplementary Fig. S21. The patterns shown in Supplementary Fig. S21 are well recovered above ~10 km depth, and even between the closely spaced F1 and F2 branches. This indicates that the inversion has sufficient resolution to distinguish slip on the two parallel branches. At depths >10 km, however, the recovery degrades and resolution decreases, a limitation inherent to inversions constrained solely by surface observations.
We calculated the GBI based on the triangular dislocation model84. The GBI is defined for each triangle as the mean angle between the triangle and all its neighboring triangles. A larger GBI indicates stronger model curvature (i.e., more pronounced bends), whereas a smaller GBI indicates a smoother fault trace.
Afterslip modeling
Afterslip primarily governs near-field deformation for a few years following an earthquake. Poroelastic rebound lasts for a short time with relatively minor deformation confined around the fault85. Viscoelastic relaxation predominantly influences the mid- and far-field deformation3. The postseismic deformation following E-1 was concentrated near the fault (Fig. 2c and Supplementary Fig. S1c1–c2), while the SNR in the far field was low, presenting challenges in isolating plausible viscoelastic deformation signals. Therefore, this study only used the afterslip model for P-1 and P-2. The InSAR time series of ASC and DSC tracks derived from the TS-GACOS-APS algorithm were utilized to perform static afterslip time series inversion at each time interval (Fig. 8a). We use the same geometric model as the coseismic slip inversion to obtain cumulative afterslip models for each stage at approximately monthly intervals (36-time intervals in P-1, covering from the end of February 2020 to the end of January 2023; 17-time intervals in P-2, from the end of February 2023 to the end of June 2024). The same strategy was applied to the study of the 2021 Maduo earthquake86.
Interseismic modeling
To estimate the slip rate distribution during I-1 period (Fig. 1e), the fault was extended vertically to a depth of 1000 km. The shallow (<30 km) fault model consists of a series of TDEs, primarily used to fit near-field deformation signals. The deep fault plane comprises vertical rectangular sub-faults extending from 30 to 1000 km depth, effectively making it semi-infinite and aiming at fitting far-field deformation signals87. We constructed the deep fault planes by vertically projecting nodes from the shallow fault at 30 km depth to 1000 km depth. The deeper part was discretized into 72 rectangular sub-faults across the fault (Fig. 3b).
To enhance stability during the inversion, we constrained the slip rate ranges of rectangular sub-faults in the deep tectonic loading zone (below 30 km) based on slip rates along the EAF referenced from previous literature (Fig. 1d). The slip rates on the F1 branch were set as follows: Palu segment at 8–12 mm yr−1, Pütürge segment at 7–11 mm yr−1, Erkenek fault segment at 5–9 mm yr−1, Pazarcık segment at 3–6 mm yr−1, and Amanos segment at 1–4 mm yr−1. For the F2, F3 (Sürgü-Çardak fault), and F4 branches, the slip rates were set at 0–3, 2–7, and 0–5 mm yr−1, respectively. The slip rates for the shallow seismogenic layer were set at 0–100 mm yr−1. Figure 3a, b depict the geometry of the EAF and the prior slip rate constraints on the deep rectangular sub-faults. During the inversion, the faulting was constrained to be close to left-lateral, with the rake angle within 10 degrees from pure left-lateral faulting.
Inversion of the slip distribution
Taking account of the spatial correlation of the densely sampled maps, we downsampled the displacement fields according to their distance to the fault to allow dense data points in the near-field and coarse data points in the far-field. This method ensures a dense distribution of data points near the fault and a coarser distribution farther from the fault, effectively preserving the overall characteristics of the surface deformation. We estimated the fault slip distribution on each triangular dislocation for the five periods using a constrained least-squares linear inversion within a uniform elastic half-space88.
where \(m\) is slip, \(d\) is the data vector, G is the Green’s functions, \({W}_{d}\) is the weight matrix, L is a first-order Laplacian operator, and λ is the regularization hyper-parameter. We applied a smoothing factor based on the second-order Laplacian derivative to mitigate unrealistic slip oscillations. Supplementary Fig. S6 shows the optimal smoothing factor for each of the five periods. For the coseismic slip inversion of the 2023 event, we employed GPS coseismic displacements, InSAR interferograms, and SAR pixel offsets. We first conducted an inversion with equal weights assigned to all datasets and then evaluated the unit variance of residuals and the reduced chi-square for each dataset. The weights were subsequently rescaled so that the reduced chi-square approached unity, and a joint inversion was performed with adjusted relative weights89,90. The final weighting scheme for GPS, InSAR phase, and SAR offset data was determined to be 30:10:1, respectively. We estimated the STD of the slip distribution by bootstrapping the down-sampled InSAR dataset randomly with data replacement91. We performed 200 bootstrap re-samplings, in which the same number of data points were randomly selected with replacement from the down-sampled dataset. Each resampled dataset was used to invert for a slip distribution. Model uncertainty was assessed by calculating the STD of the 200 inverted slip models.
Fault frictional strength inferred from slip rates
We applied the rate- and state-dependent friction law to invert the frictional parameter (a-b) using the afterslip time series of E-292. In the steady-state slip velocity (\(V\)), the shear stress on the fault plane, \({\tau }_{{ss}}\), is expressed as follows92,93:
where \(\bar{\sigma }\) is the effective normal stress, \({\mu }_{0}\) is the friction coefficient. a and b are constitutive parameters that control the amplitude of the direct (rate) and evolutionary (state) effect. When (a-b) > 0, the friction coefficient increases with slip rate, indicating that the fault exhibits steady aseismic slip, characteristic of VS regions. Conversely, when (a-b) <0, it represents velocity-weakening (VW) regions, which facilitate earthquake nucleation.
The cumulative afterslip governed by rate- and state-dependent friction law can be obtained2,93:
where, \(\alpha\) and \(\beta\) are geometric factors, \({V}_{i}\) represents the transient shallow slip rates before the earthquake, \({V}_{0}\) is a reference slip rate that controls the timescale of afterslip evolution94, \(t\) is the time elapsed since the mainshock, and \({t}_{r}\) is the relaxation time1.
By differentiating Eq. 3, the relationship between the afterslip rate \({V}_{(t)}\) and \({{{\rm{t}}}}\) is given by:
The spatiotemporal evolution of afterslip from E-2 shows a time-decaying trend (Fig. 8a). \({V}_{(t)}\) can be derived by calculating the ratio of the afterslip difference in fault over the time difference between each pair of consecutive afterslip. Based on Eq. (4), the parameters \(\beta {V}_{i}\), \({t}_{r}\), and \({V}_{0}\) can be simultaneously estimated using least-squares adjustments.
The frictional parameter (a-b) can be expressed as:
The effective normal stress \(\sigma\) is estimated as \(\sigma =\rho {gh}\times \cos ({dip})\), where \(h\) and \({dip}\) represent the depth and dip angle of each patch on the fault plane, respectively. This calculation assumes that fluid pressure does not influence the shallow part of the fault95 and utilizes a rock density (\(\rho\)) of 2720 kg m−3 and a gravitational acceleration (\(g\)) of 9.8 m s−2. The equivalent stiffness \(k\) at different depths is given by \(k=G/h\), where shear modulus \(G\) is taken as 35 GPa27.
Moment rate deficit and cumulative moment magnitude
Given the shallow (<30 km) and deep (>30 km) interseismic slip models, MRD along the EAF’s strike can be obtained by integrating the slip rate deficit of sub-faults42:
where G is the shear modulus, valued at 35 GPa. \({V}_{d}\) represents the slip rate of the deep (>30 km) sub-faults. \({V}_{i}\) and \({S}_{i}\) represent the slip rate and area of the shallow (<30 km) sub-faults, respectively. For the Erkenek, Pazarcık, and Sürgü-Çardak segments, where no aseismic creep is detected at seismogenic depths, \({V}_{i}\) is set to 0.
Next, we obtained the cumulative moment magnitude (\({M}_{w}\)) for each fault segment since its last major earthquake as96:
Where the \(\dot{{M}_{0}}\) is obtained from Eq. (6)41, \({T}_{n}\) represents the current time, \({T}_{l}\) denotes the time of the most recent major earthquake (Fig. 9b)19,27. This calculation assumes that the most recent major earthquake on each segment completely released the accumulated seismic moment.
Data availability
All the Sentinel-1 data can be freely and downloaded from https://search.asf.alaska.edu/#/. The coseismic GPS displacement data are available from Nevada Geodetic Laboratory (http://geodesy.unr.edu/). The aftershock for E-1 comes from the AFAD catalog (https://deprem.afad.gov.tr/event-catalog). The aftershock for E-2 comes from Ding et al.66. The downsampled interferograms, slip models and the distribution of the frictional parameter (a-b) from this study can be downloaded from https://doi.org/10.7910/DVN/IGXQ4Y.
References
Hussain, E. et al. Geodetic observations of postseismic creep in the decade after the 1999 Izmit earthquake, Turkey: implications for a shallow slip deficit. J. Geophys. Res. Solid Earth 121, 2980–3001 (2016).
Qiao, X. & Zhou, Y. Geodetic imaging of shallow creep along the Xianshuihe fault and its frictional properties. Earth Planet. Sci. Lett. 567, 117001 (2021).
Bürgmann, R. & Dresen, G. Rheology of the lower crust and upper mantle: evidence from rock mechanics, geodesy, and field observations. Annu. Rev. Earth Planet. Sci. 36, 531–567 (2008).
Loveless, J. P. & Meade, B. J. Spatial correlation of interseismic coupling and coseismic rupture extent of the 2011 Mw = 9.0 Tohoku-oki earthquake. Geophys. Res. Lett. 38, https://doi.org/10.1029/2011GL048561 (2011).
Wang, K. & Fialko, Y. Observations and modeling of coseismic and postseismic deformation due to the 2015 M 7.8 Gorkha (Nepal) earthquake. J. Geophys. Res. Solid Earth 123, 761–779 (2018).
Johnson, K. M., Bürgmann, R. & Larson, K. Frictional properties on the San Andreas fault near Parkfield, California, inferred from models of afterslip following the 2004 earthquake. Bull. Seismol. Soc. Am. 96, S321–S338 (2006).
Churchill, R., Werner, M., Biggs, J. & Fagereng, Å. Afterslip Moment Scaling and Variability From a Global Compilation of Estimates. J. Geophys. Res. Solid Earth 127, https://doi.org/10.1029/2021JB023897 (2022).
Floyd, M. A. et al. Spatial variations in fault friction related to lithology from rupture and afterslip of the 2014 South Napa, California, earthquake. Geophys. Res. Lett. 43, 6808–6816 (2016).
Antoine, S. L., Klinger, Y., Wang, K. & Bürgmann, R. Coseismic shallow slip deficit accounted for by diffuse off-fault deformation. Geophys. Res. Lett. 51, e2024GL110798 (2024).
Dolan, J. F. & Haravitch, B. D. How well do surface slip measurements track slip at depth in large strike-slip earthquakes? The importance of fault structural maturity in controlling on-fault slip versus off-fault surface deformation. Earth Planet. Sci. Lett. 388, 38–47 (2014).
Zinke, R. et al. Evolution and progressive geomorphic manifestation of surface faulting: a comparison of the Wairau and Awatere faults, South Island, New Zealand. Geology 43, 1019–1022 (2015).
Liu, Z., Luo, H., Klinger, Y. & Wang, T. Shear strain evolution spanning the 2020 Mw6.8 Elazığ and 2023 Mw7.8/Mw7.6 Kahramanmaraş earthquake sequence along the east Anatolian fault zone. Geophys. Res. Lett. 52, e2024GL114033 (2025).
Çakir, Z. et al. Arrest of the Mw 6.8 January 24, 2020 Elaziğ (Turkey) earthquake by shallow fault creep. Earth Planet. Sci. Lett. 608, 118085 (2023).
Reilinger, R. et al. GPS constraints on continental deformation in the Africa-Arabia-Eurasia continental collision zone and implications for the dynamics of plate interactions. J. Geophys. Res. Solid Earth 111, https://doi.org/10.1029/2005JB004051 (2006).
Weiss, J. et al. High-resolution surface velocities and strain for Anatolia from Sentinel-1 InSAR and GNSS data. Geophys. Res. Lett. 47, https://doi.org/10.1029/2020GL087376 (2020).
McClusky, S. et al. Global positioning system constraints on plate kinematics and dynamics in the eastern Mediterranean and Caucasus. J. Geophys. Res. Solid Earth 105, 5695–5719 (2000).
Cavalié, O. & Jónsson, S. Block-like plate movements in eastern Anatolia observed by InSAR. Geophys. Res. Lett. 41, 26–31 (2014).
Nalbant, S. S., McCloskey, J., Steacy, S. & Barka, A. A. Stress accumulation and increased seismic risk in eastern Turkey. Earth Planet. Sci. Lett. 195, 291–298 (2002).
Duman, T. Y. & Emre, O. The east anatolian fault: geometry, segmentation and jog characteristics. Geol. Soc. Lond. 372, 495–529 (2013).
Taymaz, T. et al. Source mechanism and rupture process of the 24 January 2020 Mw 6.7 Doğanyol–Sivrice earthquake obtained from seismological waveform analysis and space geodetic observations on the East Anatolian Fault Zone (Turkey). Tectonophysics 804, 228745 (2021).
Ragon, T., Simons, M., Bletery, Q., Cavalié, O. & Fielding, E. A stochastic view of the 2020 Elazığ Mw 6.8 earthquake (Turkey). Geophys. Res. Lett. 48, e2020GL090704 (2021).
Liu, C. et al. Complex multi-fault rupture and triggering during the 2023 earthquake doublet in southeastern Türkiye. Nat. Commun. 14, 5564 (2023).
Gallovič, F. et al. Complex rupture dynamics on an immature fault during the 2020 Mw 6.8 Elazığ earthquake, Turkey. Commun. Earth Environ. 1, 40 (2020).
Pousse Beltran, L. et al. The 2020 Mw 6.8 Elazığ (Turkey) Earthquake Reveals Rupture Behavior of the East Anatolian Fault. Geophys. Res. Lett. 47, https://doi.org/10.1029/2020GL088136 (2020).
Doğru, A., Bulut, F., Yaltırak, C. & Aktuğ, B. Slip distribution of the 2020 Elazığ Earthquake (Mw 6.75) and its influence on earthquake hazard in the Eastern Anatolia. Geophys. J. Int. 224, 389–400 (2021).
Zhou, J. et al. Geometric barriers impacted rupture processes and stress releases of the 2023 Kahramanmaraş, Türkiye, earthquake doublet. Commun. Earth Environ. 6, 56 (2025).
Güvercin, S. E., Karabulut, H., Konca, A. Ö, Doğan, U. & Ergintav, S. Active seismotectonics of the East Anatolian Fault. Geophys. J. Int. 230, 50–69 (2022).
Ambraseys, N. N. & Jackson, J. A. Faulting associated with historical and recent earthquakes in the Eastern Mediterranean region. Geophys. J. Int. 133, 390–406 (1998).
Chlieh, M. et al. Interseismic coupling and seismic potential along the Central Andes subduction zone. J. Geophys. Res. Solid Earth 116, https://doi.org/10.1029/2010JB008166 (2011).
Barbot, S. et al. Slip distribution of the February 6, 2023 Mw 7.8 and Mw 7.6, Kahramanmaraş, Turkey earthquake sequence in the East Anatolian Fault Zone. Seismica 2, https://doi.org/10.26443/seismica.v2i3.502 (2023).
Guo, R. et al. Seismic versus aseismic slip for the 2023 Kahramanmaraş earthquake doublet. Nat. Commun. 16, 959 (2025).
Xu, L. et al. The overall-subshear and multi-segment rupture of the 2023 Mw7.8 Kahramanmaraş, Turkey earthquake in millennia supercycle. Commun. Earth Environ. 4, 379 (2023).
Zhang, Y. et al. Geometric controls on cascading rupture of the 2023 Kahramanmaraş earthquake doublet. Nat. Geosci. 16, 1054–1060 (2023).
Ragon, T. & Simons, M. Accounting for uncertain 3-D elastic structure in fault slip estimates. Geophys. J. Int. 224, 1404–1421 (2021).
Cai, J., Wen, Y., He, K., Wang, X. & Xu, C. Strain partitioning, interseismic coupling, and shallow creep along the Ganzi-Yushu fault from Sentinel-1 InSAR data. Geophys. Res. Lett. 51, e2024GL111469 (2024).
Neyrinck, E. et al. The slow slip event cycle along the Izmit segment of the North Anatolian Fault. Earth Planet. Sci. Lett. 648, 119104 (2024).
Billi, A. et al. Seismic slip channeling along the East Anatolian Fault illuminates long-term supercycle behavior. Nat. Commun. 15, 8921 (2024).
Antoine, S. L. et al. The 2025 Mw7.7 Mandalay, Myanmar, earthquake reveals a complex earthquake cycle with clustering and variable segmentation on the Sagaing Fault. Proc. Natl. Acad. Sci. USA 122, e2514378122 (2025).
Wells, D. L. & Coppersmith, K. J. New empirical relationships among magnitude, rupture length, rupture width, rupture area, and surface displacement. Bull. Seismol. Soc. Am. 84, 974–1002 (1994).
Ikari, M. J., Marone, C. & Saffer, D. M. On the relation between fault strength and frictional stability. Geology 39, 83–86 (2011).
Qiao, X., Zhou, Y. & Zhang, P. Along-strike variation in fault structural maturity and seismic moment deficits on the Yushu-Ganzi-Xianshuihe fault system revealed by strain accumulation and regional seismicity. Earth Planet. Sci. Lett. 596, 117799 (2022).
Huang, Z. & Zhou, Y. A complete map of fine-scale slip rate distribution and earthquake potential along the Haiyuan fault system. Geophys. Res. Lett. 49, e2022GL101805 (2022).
Hubert-Ferrari, A., Lamair, L., Hage, S., Çağatay, M. N. & Avsar, U. A 3800 yr paleoseismic record (Lake Hazar sediments, eastern Turkey): implications for the East Anatolian fault seismic cycle. Earth Planet. Sci. Lett. 538, https://doi.org/10.1016/j.epsl.2020.116152 (2020).
Wang, B. & Barbot, S. Rupture segmentation on the East Anatolian fault (Turkey) controlled by along-strike variations in long-term slip rates in a structurally complex fault system. Geology 52, 779–783 (2024).
Ambraseys, N. N. Temporary seismic quiescence: SE Turkey. Geophys. J. Int. 96, 311–331 (1989).
Cetin, H., Güneyli, H. & Mayer, L. Paleoseismology of the Palu-Lake Hazar segment of the East Anatolian fault zone, Turkey. Tectonophysics 374, 163–197 (2003).
Balkaya, M., Akyuz, H. S. & ÖZden, S. Paleoseismology of the Sürgü and Çardak faults—splays of the Eastern Anatolian fault zone, Türkiye. Turkish J. Earth Sci. 32, 402–420 (2023).
Vavra, E. et al. The 2023 Mw 7.8–7.7 Kahramanmaraş earthquakes were loosely slip-predictable. Commun. Earth Environ. 6, 80 (2025).
Konca, A. Ö et al. From interseismic deformation with near-repeating earthquakes to Co-seismic rupture: a unified view of the 2020 Mw6.8 Sivrice (Elazığ) Eastern Turkey earthquake. J. Geophys. Res. Solid Earth 126, e2021JB021830 (2021).
Chen, K. H. & Bürgmann, R. Creeping faults: good news, bad news? Rev. Geophys. 55, 282–286 (2017).
Collettini, C., Tesei, T., Scuderi, M. M., Carpenter, B. M. & Viti, C. Beyond Byerlee friction, weak faults and implications for slip behavior. Earth Planet. Sci. Lett. 519, 245–263 (2019).
Ikari, M. J. & Kopf, A. J. Seismic potential of weak, near-surface faults revealed at plate tectonic slip rates. Sci. Adv. 3, e1701269 (2017).
Bruhat, L. & Segall, P. Deformation rates in northern Cascadia consistent with slow updip propagation of deep interseismic creep. Geophys. J. Int. 211, 427–449 (2017).
Jiang, J. & Lapusta, N. Connecting depth limits of interseismic locking, microseismicity, and large earthquakes in models of long-term fault slip. J. Geophys. Res. Solid Earth 122, 6491–6523 (2017).
Sun, T., Wang, K., Fujiwara, T., Kodaira, S. & He, J. Large fault slip peaking at trench in the 2011 Tohoku-oki earthquake. Nat. Commun. 8, 14044 (2017).
Marone, C. Laboratory-derived friction laws and their application to seismic faulting. Annu. Rev. Earth Planet. Sci. 26, 643–696 (1998).
Di Toro, G. et al. Fault lubrication during earthquakes. Nature 471, 494–498 (2011).
Noda, H. & Lapusta, N. Stable creeping fault segments can become destructive as a result of dynamic weakening. Nature 493, 518–521 (2013).
Scholz, C. H. Earthquakes and friction laws. Nature 391, 37–42 (1998).
Avouac, J.-P. From geodetic imaging of seismic and aseismic fault slip to dynamic modeling of the seismic cycle. Annu. Rev. Earth Planet. Sci. 43, 233–271 (2015).
Jia, Z. et al. The complex dynamics of the 2023 Kahramanmaraş, Turkey, Mw 7.8-7.7 earthquake doublet. Science 381, 985–990 (2023).
Bruhat, L., Barbot, S. & Avouac, J.-P. Evidence for postseismic deformation of the lower crust following the 2004 Mw6.0 Parkfield earthquake. J. Geophys. Res. 116, https://doi.org/10.1029/2010JB008073 (2011).
Yılmaz, A., Yılmaz, H., Kaya, C. & Boztug, D. The nature of the crustal structure of the Eastern Anatolian Plateau, Turkey. Geodin. Acta. 23, 167–183 (2010).
Bletery, Q., Cavalié, O., Nocquet, J. M. & Ragon, T. Distribution of interseismic coupling along the North and East Anatolian faults inferred from InSAR and GPS data. Geophys. Res. Lett. 47, https://doi.org/10.1029/2020GL087775 (2020).
Kurt, A. et al. Contemporary velocity field for Turkey inferred from combination of a dense network of long term GNSS observations. Turkish J. Earth Sci. 32, 275–293 (2023).
Ding, H. et al. High-resolution seismicity imaging and early aftershock migration of the 2023 Kahramanmaraş (SE Türkiye) Mw7.9 & 7.8 earthquake doublet. Earthq. Sci. 36, 417–432 (2023).
Goldstein, R. M. & Werner, C. L. Radar interferogram filtering for geophysical applications. Geophys. Res. Lett. 25, 4035–4038 (1998).
Song, C. et al. Triggering and recovery of earthquake accelerated landslides in Central Italy revealed by satellite radar observations. Nat. Commun. 13, 7278 (2022).
Chen, C. W. & Zebker, H. A. Phase unwrapping for large SAR interferograms: statistical segmentation and generalized network models. IEEE Trans. Geosci. Remote Sens. 40, 1709–1719 (2002).
Strozzi, T., Luckman, A., Murray, T., Wegmuller, U. & Werner, C. L. Glacier motion estimation using SAR offset-tracking procedures. IEEE Trans. Geosci. Remote Sens. 40, 2384–2391 (2002).
Xu, W. et al. Transpressional rupture cascade of the 2016 Mw 7.8 Kaikoura Earthquake, New Zealand. J. Geophys. Res. Solid Earth 123, 2396–2409 (2018).
Li, Y., Bürgmann, R. & Taira, T.Spatiotemporal variations of surface deformation, shallow creep rate, and slip partitioning between the San Andreas and Southern Calaveras fault. J. Geophys. Res. Solid Earth 128, e2022JB025363 (2023).
Yu, C., Li, Z., Penna, N. T. & Crippa, P. Generic atmospheric correction model for interferometric synthetic aperture radar observations. J. Geophys. Res. Solid Earth 123, 9202–9222 (2018).
Yu, C., Li, Z. & Penna, N. T. Triggered afterslip on the southern Hikurangi subduction interface following the 2016 Kaikōura earthquake from InSAR time series with atmospheric corrections. Remote Sens. Environ. 251, 112097 (2020).
Hu, X. et al. Ongoing compressional tectonism and regional seismic hazard revealed by the 2023 Mw6.1 Jishishan earthquake. J. Earth Sci. 36, 275–290 (2025).
Tong, X., Sandwell, D. T. & Smith-Konter, B. High-resolution interseismic velocity data along the San Andreas fault from G PS and InSAR. J. Geophys. Res. Solid Earth 118, 369–389 (2013).
Fialko, Y., Simons, M. & Agnew, D. The complete (3-D) surface displacement field in the epicentral area of the 1999 M7.1 Hector Mine earthquake, California, from space geodetic observations. Geophys. Res. Lett. 28, 3063–3066 (2001).
Biggs, J., Wright, T., Lu, Z. & Parsons, B. Multi-interferogram method for measuring interseismic deformation: Denali fault, Alaska. Geophys. J. Int. 170, 1165–1179 (2007).
Fattahi, H. & Amelung, F. InSAR observations of strain accumulation and fault creep along the Chaman Fault system, Pakistan and Afghanistan. Geophys. Res. Lett. 43, 8399–8406 (2016).
Favalli, M. & Pareschi, M. T. Digital elevation model construction from structured topographic data: the DEST algorithm. J. Geophys. Res. Earth Surface 109, https://doi.org/10.1029/2004JF000150 (2004).
Okada, Y. Internal deformation due to shear and tensile faults in a half-space. Bull. Seismol. Soc. Am. 82, 1018–1040 (1992).
Nikkhoo, M. & Walter, T. R. Triangular dislocation: an analytical, artefact-free solution. Geophys. J. Int. 201, 1119–1141 (2015).
He, L. et al. Coseismic Kinematics of the 2023 Kahramanmaras, Turkey earthquake sequence from InSAR and optical data. Geophys. Res. Lett. 50, e2023GL104693 (2023).
Yu, C. et al. Fault structure and slip mechanics of the 2022 Mw 6.7 Menyuan earthquake revealed by coseismic rupture observations. Tectonophysics 872, 230192 (2024).
Freed, A. M. Afterslip (and only afterslip) following the 2004 Parkfield, California, earthquake. Geophys. Res. Lett. 34 https://doi.org/10.1029/2006GL029155 (2007).
Fang, J. et al. Earthquake cycle deformation associated with the 2021 M 7.4 Maduo (Eastern Tibet) earthquake: an intrablock rupture event on a slow-slipping fault from Sentinel-1 InSAR and teleseismic data. J. Geophys. Res. Solid Earth 127, e2022JB024268 (2022).
Li, Y. & Bürgmann, R. Partial coupling and earthquake potential along the Xianshuihe Fault, China. J. Geophys. Res. Solid Earth 126, e2020JB021406 (2021).
Jónsson, S. N., Zebker, H., Segall, P. & Amelung, F. Fault slip distribution of the 1999 Mw 7.1 Hector Mine, California, Earthquake, estimated from satellite radar and GPS measurements. Bull. Seismol. Soc. Am. 92, 1377–1389 (2002).
Xue, X., Freymueller, J. & Lu, Z. Modeling the posteruptive deformation at Okmok based on the GPS and InSAR time series: changes in the shallow magma storage system. J. Geophys. Res. Solid Earth 125, e2019JB017801 (2020).
Xi, C. et al. A simple weighting method for inverting earthquake source parameters using geodetic multisource data under Bayesian algorithm. Geophys. J. Int. 237, 1142–1156 (2024).
Efron, B. & Tibshirani, R. Bootstrap methods for standard errors, confidence intervals, and other measures of statistical accuracy. Stat. Sci. 1, 54–75, 22 (1986).
Ruina, A. Slip instability and state variable friction laws. J. Geophys. Res. Solid Earth 88, 10359–10370 (1983).
Perfettini, H. & Avouac, J.-P. Postseismic relaxation driven by brittle creep: a possible mechanism to reconcile geodetic measurements and the decay rate of aftershocks, application to the Chi-Chi earthquake, Taiwan. J. Geophys. Res. Solid Earth 109, https://doi.org/10.1029/2003JB002488 (2004).
Ingleby, T., Wright, T. J., Hooper, A., Craig, T. J. & Elliott, J. R. Constraints on the geometry and frictional properties of the main Himalayan thrust using coseismic, postseismic, and interseismic deformation in Nepal. J. Geophys. Res. Solid Earth 125, e2019JB019201 (2020).
Oruç, B., Gomez-Ortiz, D. & Petit, C. Lithospheric flexural strength and effective elastic thicknesses of the Eastern Anatolia (Turkey) and surrounding region. J. Asian Earth Sci. 150, 1–13 (2017).
Kanamori, H. The energy release in great earthquakes. J. Geophys. Res. 82, 2981–2987 (1977).
Reitman, N. G. et al. Rapid surface rupture mapping from satellite data: the 2023 Kahramanmaraş, Turkey (Türkiye), earthquake sequence. Seismic Rec. 3, 289–298 (2023).
Walters, R. J., Parsons, B. & Wright, T. J. Constraining crustal velocity fields with InSAR for Eastern Turkey: limits to the block-like behavior of Eastern Anatolia. J. Geophys. Res. Solid Earth 119, 5215–5234 (2014).
Westaway, R. & Arger, J. The Gölbaşi basin, southeastern Turkey: a complex discontinuity in a major strike-slip fault zone. J. Geol. Soc. 153, 729–744 (1996).
Acknowledgements
We are grateful to Professor Jyr-Ching Hu for the constructive discussion. The authors are deeply grateful to Dr. Solène Antoine and the other anonymous reviewers for their constructive comments. We also thank Dr. Joe Aslin, Dr. Sylvain Barbot, and the editorial staff of Communications Earth & Environment for their valuable support throughout the review process. This research was funded by the National Science and Technology Major Project (2024ZD1000407), the National Natural Science Foundation of China (42377159), Fundamental Research Funds for the Central Universities, Chang’an University, China (300102263717, 300103724057, 300102264901, 300102263401), the Shaanxi Province Geoscience Big Data and Geohazard Prevention Innovation Team (2022).
Author information
Authors and Affiliations
Contributions
B.H.: Formal analysis, investigation, methodology, software, validation, visualization, writing—original draft. C.Y.: Conceptualization, methodology, writing—review and editing, supervision, funding acquisition. Z.L.: Conceptualization, Project administration, resources, supervision, writing—review. Y.A.: Conceptualization, supervision, writing—review. C.S.: Methodology, software. Z.L.: Software. X.H.: Data curation. J.P.: Conceptualization, resources.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Earth & Environment thanks Solene Antoine, Ya-Ju Hsu and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. Primary Handling Editors: Sylvain Barbot, Joe Aslin and Aliénor Lavergne. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
43247_2025_3025_MOESM2_ESM.pdf (download PDF )
Supplementary Information for Slip complementarity and deficit of the East Anatolian Fault revealed by geodetic observations
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Han, B., Yu, C., Li, Z. et al. Slip complementarity and deficit of the East Anatolian Fault revealed by geodetic observations. Commun Earth Environ 6, 1053 (2025). https://doi.org/10.1038/s43247-025-03025-2
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s43247-025-03025-2
