
Abstract
Targeted communication is made possible using beamforming. It is extensively employed in many disciplines involving electromagnetic waves, including arrayed ultrasonic, optical, and high-speed wireless communication. Conventional beam steering often requires the addition of separate active amplitude and phase control units after each radiating element. The high-power consumption and complexity of large-scale phased arrays can be overcome by reducing the number of active controllers, pushing beamforming into satellite communications and deep space exploration. To address this, we propose a phased array antenna design based on dimensionality-reduced cascaded angle offset phased array (DRCAO-PAA). By applying singular value decomposition (SVD) to compress the coefficient matrix of phase shifts, our method reduces the number of active controllers while maintaining beam-steering performance. Furthermore, the suggested DRCAO-PAA was sing the singular value deposition concept. For practical application the particle swarm optimization algorithm and deep neural network Transformer were adopted. Based on this theoretical framework, an experimental board was built to verify the theory. Finally, the 16/8/4 -array beam steering was demonstrated by using 4/3/2 active controllers, respectively.
Similar content being viewed by others

Introduction
Beamforming and beam-steering of radio, optical waves, and acoustic wave are critically needed for many applications such as high-capacity radio wireless communication1,2, optical wireless communication3,4, radar5, light detection and ranging e.g., LiDAR6, arrayed ultrasonic equipment7, and sonar8. Traditionally, the electromagnetic wave is radiated (from a transmitter) or collected (by a receiver) to/from all directions. No matter whether there is an object of interest in a specific direction, the energy is transmitted in/collected from a wide range of directions. By spatially focusing (beamforming) the radio/optical signal to a specified direction, the energy required for realizing a function e.g., data transmission, data detection, energy transfer, can be efficiently reduced9. Moreover, the spatial interference phenomenon between objects radiating/receiving can be minimized by beamforming10. It yields, 1) a better spatial de-multiplexing of parallel data streams, enabling a higher data capacity9,11,12,13; 2) a better determination of angular reflection reducing multipath effects which may deteriorate system performance14. Using the same total transmit power from multiple antennas, the beamforming can provide a stronger received signal since the signals from different transmitter antennas are coherently summed up. To lead the focused wave to a desired direction, a beam steering function is thus required together with beamforming. The most popular and powerful scheme to enable beam-steering is the well-known phased array antenna (PAA), which is an array of antenna elements that are driven by signals with well-determined phase relations between those elements15. Here an antenna refers to a radiator of waves that can be regarded as propagating phase fronts, hence including electromagnetic waves in both the light and non-light, non-ionized spectrum, and acoustic waves.
Traditionally, a 1-by-N phased array antenna requires N-1 phase shifters or other active control units. Many schemes are proposed to reduce the number of phase shifters, but other kinds of active control units should be introduced as alternative16,17,18,19. Table 1 shows the state-of-art regarding the number reduction of phase shifters in a PAA. Existing approaches, such as subarray decomposition20,21,22,23,24,25,26,27, and vector synthesis28,29,30,31,32, reduce phase shifter counts but introduce trade-offs in beam-steering range with the same antenna array. Specifically, the subarray compression was first proposed in 197420. After that, many scientists started to study the optimal subarray division methods, such as random subarray size22, the interwoven network for subarray23, and recursive algorithm for subarray division24. Work in Rupakula et al.24, using 64 phase shifters and 64 adjustable amplifiers, and control the 16×16 array to complete a \(\pm 20^\circ\) beam scan. And work in Juarez et al.26 using an asymmetric distribution combination feeding network to achieve 36° scan angle. The earliest vector synthesis phased array was proposed by Amir Mortazawi in 201028. Although the amount of the phase shifter is reduced, each array element is still followed by a tuneable amplifier control. In this study, eight antenna array elements can complete a 25° scan with two-phase shifters and eight tunable amplifiers. Based on this theory, Amir led his group to conduct several studies31,32. The latest research results of their group have successfully controlled the eight antenna array elements to complete a \(\pm 90^\circ\) scan in \(Ku\)-band using only four adjustable phase shifters31.
As shown above, our work achieves the highest phase-shifter reduction (up to 87.5% fewer phase shifters) while still supporting a ~ 30° total scan range. In other words, each phase shifter in our SVD-based design effectively controls 8 antenna elements – double the grouping factor of most prior subarray or vector-synthesis techniques (which typically grouped 4 elements per phase shifter for ~75% reduction). This represents a substantial improvement over earlier efforts, which generally achieved at most 50–75% phase shifter count reduction for similar scan angles. Furthermore, our method provides a general theoretical framework (based on singular value decomposition) that is inherently scalable to large arrays.
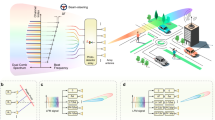
In this work, we propose a Cascaded Angle Offset PAA (CAO-PAA) and its Dimensionality-Reduced variant (DRCAO-PAA). As shown in Fig. 1, unlike previous approaches, DRCAO-PAA treats the beamforming weight space as a matrix and applies Singular Value Decomposition (SVD) to compress its rank, effectively reducing active controller count. We further optimize the system using Particle Swarm Optimization (PSO) and Transformer-based models to construct an efficient set of basis vectors for beam steering.

Dimensionality Reduced Antenna Array Concept.
We validate this approach experimentally: an 8-element array achieves continuous 0–30° beam steering using only three pairs of phase shifters and VGAs, and a 4-element array demonstrates 8° continuous beam sweep with just two phase shifters and two amplifiers in an anechoic chamber. These results demonstrate substantial hardware simplification without sacrificing steering precision.
Our DRCAO-PAA framework not only unifies existing methods under a generalizable mathematical model but also enables low-cost, low-complexity phased arrays, well-aligned with the demands of 6 G massive MIMO and satellite communications.
Results
Cascaded angle offset phased array antenna (CAO-PAA)
Figure 2 illustrates the basic idea of a cascaded angle offset phased array in an intuitive way. Each dashed circle denotes the initial phase of continuous waves at the same carrier frequency. The angles of the arrows denote the value of phases (angle offsets). In the first row, a cascaded angle offset group (CAO-G) is generated with the phase offset of the n-th phase shifter denoted as \(90^\circ -(n-1)\times 30^\circ\). Similarly, the second row denotes another CAO-G generated with: \(90^\circ +(n-1)\times 30^\circ\).

The green and red arrows represent two cascaded angle offset groups. The black arrows represent the combination of the weighted cascaded angle offset groups. Arrows represent phase offsets, with direction indicating phase value and length proportional to amplitude ratios determined by power combiners.
The continuous waves with the two CAO-G are then combined by summing them with equal/unequal power ratios as shown in the third/fourth rows. The resulting combined signals are represented by the black arrows. The combined continuous waves are then launched to a linear array of antennas. As shown in the third row of Fig. 2, the power ratio is 1:1, which yields that the generated waves only have two angle offsets, namely \(\pm {90}^{\circ }\). As shown in the fourth row, when the power ratio is changed, the combined phases will be tuned quasi-linearly, which fits a linear phased antenna array.
To optimize or replace the current phased array system, it is necessary to explore the theoretical framework of CAO-PA to stretch the innate advantages of the synthesis. Matrix expression and operation provide appropriate solutions.
In this way, the beam directions of a phased array antenna with element spacing \(d\) can be determined by a \(1\times N\) linear phase shift group with phase difference \(\Delta {\varphi }_{m}\). For a beam direction at θm, the corresponding phase shifts at the n-th elementary antenna \({\varphi }_{n}\) of a PAA can be expressed as33,34:
For the phase shifts of all elementary antennas, the phase shift distribution can be as an N×M matrix:
Each vector \({\Phi }_{N\times 1}^{M}\) can be decomposed into a linear combination of R vectors (\({\varPhi }_{N\times R}\)) that can be referred to as the basis of \({\varPhi }_{N\times M}\) where\(R\) is the rank of \({\varPhi }_{N\times M}\). Usually, the number of scanning directions \(M\) is much larger than the number of elementary antennas\(N\). Therefore,\(R\) is not larger than\(N\). Particularly, when \(R\) is equal to \(N\), one special basis is the identity matrix. It is the case of a traditional phased array, where the phase and amplitude of the radiated signal at each antenna are independently controlled. For the rest, the number of active controllers can be reduced with the basis\({\varPhi }_{N\times R}\). Moreover, regardless of some weights of the whole basis, the whole system can be further simplified with a new fungible basis\({\varPhi }_{N\times \varLambda }\), where \(\Lambda\) is a little bit less than\(R\). In this way, a reasonable fungible basis will give rise to the performance penalty which can be reduced accuracy of beam directions or reduced antenna gain in an acceptable range.
Dimensionality reduced CAO-PAA
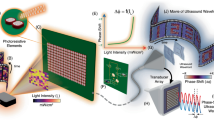
To achieve the goal of stretching the innate advantages of CAO-PAA, a matrix compression method is applied to simplify the basis of \({\varPhi }_{N\times M}\), avoiding the redundancy of active controllers. Assume that A is an M×N matrix indicating the input signals of the array elements. Due to the relations, each row vector denotes one combination of amplitude and phase in an\(N\)-element antenna array, which indicates one unique direction. With the singular value deposition (SVD)35, the matrix A can be expressed as
where U is a \(M\times M\) unitary matrix, S is a \(M\times N\) rectangular diagonal matrix with non-negative real numbers on the diagonal and \(V\) is a \(N\times N\) unitary matrix. The number of non-zero singular values is equal to the rank of \(A\). Because of the non-uniqueness of SVD, it is possible to choose the decomposition with the singular values in descending order. The singular values are always ordered from largest to smallest. Once a singular value is found to be less than an arbitrarily small number \(\varepsilon\), then the remaining singular values will be replaced by 0 to generate the reasonable fungible basis that is discussed above. The rank of the new diagonal matrix \(\Lambda\) equals the number of non-zero terms in the matrix. The assessment of the singular value can be adjusted by the accuracy of the system. In this way, a compressed matrix \(B\) can be expressed with proper rank as
With the desired rank, the difference between \(A\) and \(B\) can be limited to a small range, which minimizes the performance penalty.
After matrix compression, the linear vector group(LIVG), which can be determined by matrix\(B\), is used to describe the amplitude and phase distributions. Without loss of generality, assume that the rank of \(B\) is equal to\(R\). Due to the features of the matrix, \(p\) bases can be chosen to express the rest \(M-R\) row vectors in matrix\(B\). Then all directions from M can be expressed in a linear superposition of the vectors in the LIVG matrix.
For any direction in the matrix \(B\), there is always a linear vector \(K\), which denotes the linear combination of LIVG. Assume that \(K\) is a column vector, and the relation of the linear combination is given by:
where \(C\) is the LIVG matrix with full a rank, and \(P{\prime}\) is the selected row vector in matrix\(B\). Due to the full rank of the augmented matrix in Eq.(11), \(K\) has a solution from the system of linear equations. Therefore, based on one LIVG, any direction corresponds to one unique K. Furthermore, all the elements in \(K\) are in form of \({A}_{m}{{{\rm{e}}}}^{j\varphi }\), where \({A}_{m}\) is the amplitude, and \(\varphi\) is the phase. The practical function of \(K\) can be realized by \(R\) amplifiers and \(R\) phase shifters. In this way, the complexity of the \(M\times N\) matrix in the whole system can be decreased by using a LIVG and \(R\) active controllers.
Simulation for dimensionality reduced CAO-PAA in beam steering
Phase shifts and amplitude weights are applied to a 1-D linear evenly spaced phased array antenna array to evaluate the beam steering performance utilizing the proposed DRCAO-PAA concept.
The simulation results in Fig. 3(a–g) show that beam steering from 0 to 30° can be realized with just 16 active controllers in controlling a \(1\times 128\) array. The phase shifts of each element of the one-dimensional 128 array \(N=128\) for 128 different scan angles \({\theta }_{m}\) (\(0 < {\theta }_{m} < {30}^{\circ }\)) are shown in Fig. 3(a). A grayscale map is used to depict it; for instance, a grayscale of 0 (black) indicates −180° phase shifts, whereas a grayscale of 1 (white) indicates +180°. After SVD compression, the initial 128 eigenvalues are reduced to 16 eigenvalues, and the phase shifts matrix is reconstructed as shown in Fig. 3(b).

a Gray scale map of the phase shifts in array N = 128 elements for M = 128 angles; b Gray scale map of the phase shifts in array N = 128 for M = 128 angles after singular value decomposition (SVD) compression; c Normalized far-field pattern for LIVG consists of equally spaced vectors; d Normalized Ideal far-field pattern from 0° to 30°; e Reconstructed matrix normalized far-field pattern from 0° to 30°; f Magnitude of K factors for each LIVG vectors; g Phase of K factors for each LIVG vectors.
To illustrate the process of dimensionality reduced antenna array in beam steering in more detail, the beam steering simulation was performed with 16 vectors of the reconstructed matrix selected equally spaced. These 16 vectors were used to compute and synthesize a far-field pattern, which is shown in Fig. 3(c). Comparing the normalized far-field pattern calculated with (Fig. 3(e)) and without (Fig. 3(d)) eigenvalue compression matrix, the mean absolute error of the beam pointing is only within 1.3°. This indicates that there is very little beam pointing loss due to the distortion appeared in Fig. 3(b).
The simulation analysis shows that it is possible to choose vectors at equal intervals to create LIVG. However, different vector selection functions will affect the factors of \(K\). Figure 3(f, g) illustrates the amplitude and phase of \(K\) while scanning 128 various angles, which indicate the magnification required by the amplifier and the range of the phase shifter to be adjusted. Especially the amplifier multiplier, the maximum value exceeds 40. The required phase shift is evenly distributed between [−180°, 180°]. Therefore, LIVG algorithms are proposed to optimize the LIVG building.
LIVG building in DRCAO-PAA
From theoretical analysis there is infinite sets of solutions LIVG matrix, however, only part of them can be used in applications to avoid obtaining improper K with an high amplification factor. Considering the cost and benefit of an array in applications, the amplifier gain is constrained, and the phase shift precision is also limited. Thus, the establishment of LIVG affects the performance of the DRCAO-PAA beam steering.
The most straightforward and effective way is to directly choose \(R\) linearly uncorrelated vectors in the \(M\times N\) matrix to build the LIVG such as 16 equally spaced vectors displayed in Fig. 3(c). In order to find out the proper LIVG, particle swarm optimization (PSO) is introduced in our algorithm27. An optimization function is provided to PSO to minimize the performance penalty in beam steering:
At \(mth\) scan step, \(Am{p}_{idear,m}\),\(Angl{e}_{ldear,m}\) represent the main lobe magnitude and pointing angle of the ideal far-field pattern; \(Am{p}_{svdcompr,m}\), \(Angl{e}_{ldear,m}\) represent the main lobe magnitude and pointing angle of the LIVG reconstructed far-field pattern. The goal of the optimization is to minimize the average difference between the ideal far-field pattern and the LIVG reconstructed far-field pattern in terms of main lobe beam pointing and magnitude. The constraint is that the amplifier gain needs to be less than 20 ( ~ 13 dB). This approach minimizes errors in beam pointing and main lobe amplitude when performance penalties are inevitable, to enhance DRCAO-PAA ‘s beam steering performance.
As illustrated in Fig. 4(a–h), the process of obtaining the optimal LIVG is demonstrated by using the PSO algorithm. The simulation is based on 16 elements (\(N=16\)) line phased array with a maximum scan angle of 30°, and the number of scanning steps is 128 (\(M=128\)). Figure 4(a) displays the weights for the 16 array elements as they are scanned at various angles. An ideal linear antenna array could synthesize beams at a specific angle based on the weights of each row, as shown in Fig. 4(b). Considering the performance penalty, an appropriate degree of compression should be set after SVD. In this case, the first four eigenvalues make up 92.87% of the weight of the total eigenvalues.

Deep Learning Case input data set consist of scan angle = m(m = 15,20,…,85); element = n(n = 4,5,6,…,16), rank = n-1;output data set was the optimized LIVG. a M = 128, N = 16 Grey-scale map represents phase shifts [−180°,180°]at element n, degree m; b Normalized Ideal Far-field pattern(red) form 0° to 30°; c Grey-scale map after SVD compressed. d Grey-scale map reconstructed by LIVG. e Reconstructed weight matrix far-field pattern(blue) from 0° to 30°. f Iterative convergence of PSO algorithm. g The optimally constructed LIVG, where each row vector of the LIVG represents a specific beam pointing: 0°(blue),8°(purple), 12°(yellow), 30°(red). h Normalized Ideal far-field pattern(red with shadow) and optimal LIVG-built normalized far-field pattern(blue with shadow). i Deep Learning Data Set building; j Topology of Transformer Deep Learning Network Structure; k Far-field pattern of the LIVG matrix generated by the deep learning model (dashed line) and PSO algorithm (solid line).
Therefore, in this case, four vectors are selected to construct LIVG (\(rank=4\)). After recreating the matrix by zeroing the remaining eigenvalues, as illustrated in Fig. 4(c), the distortion of the weights is almost negligible. The weight matrix as in Fig. 4(d) is reconstructed again after applying the constraints of Eq.(6) to the coefficients \(K\). The distortion of the weight matrix gradually becomes apparent. Such distortion could potentially affect the beam pointing.
The optimizer’s objective is to create a better collection of LIVGs such that the difference between the ideal far-field pattern Fig. 4(b) and the reconstruction’s far-field pattern Fig. 4 (e) is sufficiently minimal to improve beam pointing accuracy. The algorithm is expected to converge the optimizer function value at 2.39 after 200 iterations as shown in Fig. 4(f). As shown in Fig. 4(g) the optimized LIVG was built, and the far-field pattern formed by the restructure weight matrix is compared to the far-field pattern of the ideal antenna in Fig. 4(h). The reconstructed far-field pattern is nearly identical to the ideal far-field pattern during the 30° scan in terms of beam direction, which implies that the active devices of the array system can be cut down to 25% by regulating the phased array of 16 elements using only 4 amplifiers and phase shifters and loss the beam pointing accuracy less than 1.73°.
To eliminate the redundancy of the repetitive computation and design a general LIVG building model, a deep learning model was designed. A wider field-of-view model is required due to our data consists of a collection of numeric values. Transformer36 has the qualities we need, such as a relatively low induction bias and a correlation of all feature values, compared to Convolutional Neural Networks (CNN)37 and Recurrent Neural Networks (RNN)38.
To generate training data for this model, as depicted in Fig. 4(i), a more comprehensive dataset was constructed by traversing steering angles from 5° to 85° with 5° for each step, element numbers from 4 to 16 with 1 for each step, and LIVG with rank \(r=2\) to \(N-1\) at intervals. For each piece of data, the input is a \(128\times 32\) matrix that includes the 16 array components’ complex weights (both real and imaginary) as well as the number of scan steps of M = 128 (If the number of arrays N < 16, the remaining values are zero. The output is the optimized LIVG for each input matrix.
The topology of the transformer is elementary, as shown in Fig. 4(i). First, the weight matrix is expanded by the visual transformer into 64 blocks of size \(64\times 16\). In contrast to the standard visual transformer39, patches are one-dimensional data in DRCAO-PAA, so that the Transformer, which is commonly used to process languages, can each patch be considered as a token (like a word) that can be inserted into the Transformer.
As the model performance is admirable in the test dataset with the 89.68% cosine similarity and the 0.0748 mean absolute error (MAE), the Transformer-based model can quickly generate an optimum LIVG, when given the DRCAO-PAA design parameters (such as the number of array elements, maximum scan angle, etc.). Figure4(j) depicts the far-field pattern of the LIVG matrix generated by the deep learning model (dashed line) and the far-field pattern of the optimal LIVG matrix solved by the PSO algorithm (solid line). The deep neural network fits the PSO algorithm well. It will simplify the design process and speed up the DRCAO-PAA calculations. This concept is also applicable to a 2D model, with the derivation of the 2D DRCAO-PAA and simulation results shown in Fig. S1.
System demonstration
To verify our proposed concept, a five-step experiment is set up, including experimental setup, Implementation of DRCAO-PAA, beam steering execution, measurement, and validation. It is designed as a mm-wave phase shifter module operating at 28 GHz for Experimental Setup. Different LIVGs are used to characterize the vector space of antenna array element weights. The weights were set by adjusting the output chip’s control of amplitude and phase to implement the DRCAO-PAA. Beam steering was achieved by adjusting the amplitude and phase with variable K factors between the input layer and the middle layer. We measured the S21 parameters between each input port and output port on the DRCAO-PAA verification board using a vector network analyzer. The normalized far-field pattern of the beam was synthesized by calculating these measured S21 parameters. Finally, we carried out a far-field pattern measurement in the chamber by applying 2 pairs of phase shifters and a variable gain amplifier.
In detail, as shown in Fig. 5(a), a mm-wave phase shifter printed circuit board (PCB) module is used to verify the DRCAO-PAA theory. Figure 5(b) shows the conceptional block diagram of the phase shifter module. Three layers—the input layer, middle connection layer, and output layer—combine to form the entire module design. In this experiment, a maximum of 4 inputs and 16 outputs were accomplished. By having low-cost and commercially available silicon beamformer chips on the input and output layer PCBs, each path between input and output ports can adjust its amplitude and phase independently with high resolution.

a Dimensionality-reduced cascaded angle offset (DRCAO-PAA) verified board prototype. b DRCAO-PAA verified board Schematic, Input layer(red), middle layer(blue), output layer(yellow). c Far-field Pattern Measurement in Spherical mm-Wave Anechoic Chamber d 28GHz mm-wave phased array. VNA: vector network analyzer.
For mapping DRCAO-PAA theory, each yellow tap represents a fixed tap, to implement the weights of each vector in the LIVG; red features a tunable tap with adjustable amplitude and phase (linear Vector K). As an illustration, consider a LIVG built with rank=2 and N = 4. The LIVG weights can be set by adjusting the output chip’s control of the amplitude and phase of the link between Middle 1-Output 1,2,3,4 and Middle 2-Output 1,2,3,4. Beam steering is achieved by adjusting the amplitude and phase of the link between Input 1-Middle 1 and Input 2-Middle 2 with variable K.
A LIVG with rank=3N = 8(referred to as r = 3) which reduces 62.5% component, and a LIVG with rank=4N = 16(referred to as r = 4) which reduces 75% component, were both utilized to evaluate the DRCAO-PAA. After finishing the fixed tap equalization via the SPI serial interface. To achieve the 0–30° beam steering, r = 3 or r = 4 taps are employed to control 3 or 4 vectors of LIVG. The \({S}_{21}\) parameters were measured between each input port and output port on the DRCAO-PAA verification board with a vector network analyzer (VNA Agilent Technologies PNA Network Analyzer E8361C).
The normalized far-field pattern of the beam was synthesized by the calculation of measured S21 parameters. Figure. 6 (a) shows the normalized far-field pattern computed and synthesized from each of the three vectors in the LIVG with rank=3, pointing at 14.4°, 25.92°, and 29.52°, respectively. Five sets of K-factors were employed to control the LIVG to achieve beam steering from 0 to 30°. As shown in Fig. 2 (b), the normalized far-field pattern computed and synthesized by 5 sets measured S21. The beam steering from 0 to 30° is accomplished based on the DRCAO-PAA theory to regulate these three non-uniformly selected vectors.

a Calculate and synthesize far-field pattern for 3 vectors in LIVG with r = 3. b Control linear vector group (LIVG) with r = 3 to complete 0 ~ 30° beam steering. c Calculate and synthesize far-field pattern for 4 vectors in LIVG with r = 4. d Control LIVG with r = 4 to complete 0 ~ 30° beam steering. e Measured far-field pattern for 2 vectors in LIVG with r = 2. f Control LIVG with r = 2 to complete 6° ~ 14°beam steering. (Different colors means different beam pointing).
For the 4 vectors case, Fig. 6(c) shows the normalized far-field pattern computed and synthesized from each of the 4 vectors in the LIVG, pointing at 3.24°, 6.12°, 11.16°, and 28.44°, respectively. With 5 sets of K factors, the beam steering was performed from 0 to 30°. As shown in Fig. 6(d), the normalized far-field pattern computed and synthesized by 5 sets measured S21. The case of 4 vectors is also complete the beam steering from 0 to 30°, and the beam synthesized by 16 antennas is narrower and more accurate pointing.
To further verify the DRCAO-PAA hypothesis, the setup shown in Fig. 5(c) was utilized to evaluate the antenna’s far field. The whole measurement was performed in a spherical mm-wave anechoic chamber. As shown in Fig. 6(e, f), the normalized far-field pattern of the beam was measured using this setup. With rank=2, N = 4, the normalized far-field pattern of the two vectors in LIVG, pointing at 6° and 9°, was shown in Fig. 6(e). To achieve the beam steering from 6° to 14°, different K is applied with the help of 2 phase shifters, and 2 variable gain amplifiers (VGA). As shown in Fig. 6(f), six beams are pointing at 6°,7°,8°,9°,10°, and 14°, which demonstrate beam steering from 6° to 14°. This experiment verified the correctness of the DRCAO-PAA theory by controlling a 1×4 phased array with two active controllers to complete beam steering.
The above series of experiments are used to verify our theory. 3-vectors(\(rank=3\) independent vector group) are used to characterize the vector space consisting of 8(\(N=8\)) antenna array elements weights and 4-vectors(\(rank=4\) independent vector group) are used to characterize the vector space consisting of 16(\(N=16\)) antenna array elements. The experiments demonstrate that, based on DRCAO-PAA theory, any array size of a phased array can be perfectly driven with fewer active controllers to complete beam steering.
Conclusion and future aspects
We have proposed a Dimensionality-Reduced Cascaded Angle Offset Phased Array (DRCAO-PAA) theory, which introduces Singular Value Decomposition (SVD) to compress the scan and weight matrix ranks, thereby reducing the number of active components required for beam steering. By constraining the amplitude coefficients and applying Particle Swarm Optimization (PSO) and Transformer-based models, we further optimize matrix construction and enable efficient hardware implementation. Experimental validation demonstrates that DRCAO-PAA achieves effective beam steering over 0–30° using only three pairs of phase shifters and VGAs to control an 8-element array. Additionally, in a spherical anechoic chamber, we demonstrate continuous 8° beam steering with just two phase shifters and two adjustable amplifiers for a 4-element array.
This unified framework not only generalizes prior phase-shifter-reduction techniques but also reduces system complexity and cost by enabling implementation with simpler attenuators or low-gain amplifiers. While our current validation is for 1D linear arrays, the underlying matrix compression principle is extendable to 2D planar arrays, where future work will explore orthogonal cascading and tensor decomposition strategies to enable full 3D beam steering with ultra-low controller counts—supporting the vision of scalable, AI-native 6 G and satellite communication systems.
Method
Dimensionality reduced CAO-PAA in beam steering
Phase shifts and amplitude weights are applied to a 1-D linear evenly spaced phased array antenna array to evaluate the beam steering performance utilizing the proposed DRCAO-PAA concept. At angle \(m\), weights with array number \(N\) reconstructed by SVD compression can be expressed as:
where \({k}_{r}\) denotes the \(rth\) magnitude, \({\kappa }_{r}\) denotes the \(rth\) phase, \({\vec{c}}_{r}\) denotes the \(rth\) row vector in the composed LIVG matrix, which can be expressed as
where \({C}_{r,n}\) denotes the amplitude of the \(rth\) vector at \(nth\) element, \({\phi }_{c(r,n)}\) denotes the phase shifts of the \(rth\) vector at \(nth\) antenna.
Equation 8 can be rewritten as
The direction vector of a one-dimensional phased array, denoted as
\(k=2\pi /\lambda\), \(\lambda\) is the RF signal wavelength.
Based on the beamforming theory33, The far field pattern (FFP) of such an array could be expressed as:
The pointing error can be expressed as the peak value difference between the far field pattern before and after SVD operation.
Particle swarm algorithm in DRCAO-PAA
The particle swarm algorithm is a swarm intelligence algorithm designed by simulating the predatory behaviour of a flock of birds. Each particle acts as a potential solution with its unique velocity and position, and each particle has an objective value that is based on its own location which indicated the vectors index of the M×N matrix. The algorithm parameters of PSO are listed in Table 2.
First, a set of population particles is produced at random. The particles can alter their own location, which alters the objective value, by keeping track of these two best positions: the population’s overall best position gBest and the historical best position of each population particle pBest.The subsequent equation accounts for the particle’s position and velocity40.
where i = 1,2,……,N, N is the seed size, r is the dimensionality which is the rank of the LIVG in this algorithm, v is the particle velocity, x is the particle position which is the index in the M×N matrix, v is the particle velocity, t is the current iteration number, and c1, c2 are learning factors, and rand() is a uniformly distributed function between [0,1].
Transformer for LIVG building
16 layers of Transformer Encode were used to build our model which proposed neither a CNN nor an LSTM, but a mechanism called dot-product Attention, on top of which the model (Transformer) is already substantially better than existing methods.
Query, Key, and Value are the three variables that The Transformer employs in (dot product) attention. In essence, the algorithm multiplies each Key by its corresponding Value to get the Attention Weight of the Query and Key phrases39.
In our model, Multi-Head Attention is used as well. It uses multiple Attention Heads (in the case of MLP, the “number of hidden layers” is increased), defined as follows:
where
Each Head has its own projection matrices\({{W}_{i}}^{Q},{{W}_{i}}^{K},{{W}_{i}}^{V}\), projected features of these matrices are used to create attention.
The Transformer model’s training process is split into coarse and fine modes. With the learning rate of 1e-5, the 200 training sessions in coarse mode are carried out using the AdamW optimizer41. With the learning rate of 1e-7 and the momentum factor set to 0.1, the 300 training sessions in fine mode are carried out using the SGD optimizer42. To prevent overfitting, the MAE is used as the loss function of the model. The “cosine similarity,” which measures how similar two numerical sequences are, is selected as the metric. The model completes training with a lossy MAE of 0.0562, and a cosine similarity of 91.83%.
Design of mm-wave phase shifter module
The mm-wave phase shifter module is operating at 28 GHz, and contains 3 layers (Fig. 5a):
The input layer has 4 inputs and 16 outputs and is made using four 1-to-4 phase shifter PCBs. On each PCB, the input signal is split into 4 paths (1-to-4), where each path has an independent 6 bits 30 dB amplitude control and 6 bits 360-degree phase control. This is achieved by using a commercially available beamformer chip, which is set to TX mode in this experiment. The chip operates at 25-30 GHz and has a max output power of +10 dBm at each output. The gain and amplitude control can be done through SPI, and the chip on each PCB has a different hardware address, so that they can be controlled by a single SPI master device.
The output layer has 16 inputs and 16 outputs and is made using four 4-to-4 PCBs. Each PCB has 4 beamformer chips, which is the same chip used on the input layer PCB. In this case, the beamformer chips are set to RX mode, where each chip can combine 4 inputs signal to 1 output and have independent amplitude and phase control on each path. As a result, by having 4 chips on board in parallel and sharing the same 4 inputs, each board can operate as a 4-to-4 network.
The middle layer is built to route and distribute the signals between the input and output layers. It also serves as a master SPI controller and power supply for all the beamformer chips used in the module. The complete mm-wave phase shifter module consumes about 12 W from a single 3.3 V power supply. On the board, there are LDOs to regulate the supply voltage and SPI buffer to minimize the noise on the control signals. The SPI can operate up to 50 MHz, which allows the module to synthesize any phase shift in any paths in microseconds.
As each path in the input and output layers has an independent amplitude and phase control, the module provides enough flexibility to synthesize and implement different DRCAO-PAA algorithms, as well as calibrate any system amplitude imbalance between different antenna channels.
Data availability
The data that support the plots within this paper and the other finding of this study are available from the corresponding author upon reasonable request.
Code availability
The code supporting the findings of this study is available from the corresponding author upon reasonable request. The custom scripts were developed using MATLAB/Python and are specific to the experiments described in this manuscript.
References
Wu, C. et al. A phased array based on large-area electronics that operates at gigahertz frequency. Nat. Electron. 4, Art. no. 10 (2021).
E. Aryafar, N. Anand, T. Salonidis, and E. W. Knightly, ‘Design and experimental evaluation of multi-user beamforming in wireless LANs’, in Proceedings of the sixteenth annual international conference on Mobile computing and networking, in MobiCom ’10. New York, NY, USA: Association for Computing Machinery, 2010. 197–208 https://doi.org/10.1145/1859995.1860019.
Cao, Z. et al. Advanced Integration Techniques on Broadband Millimeter-Wave Beam Steering for 5G Wireless Networks and Beyond. IEEE J. Quantum Electron. 52, 1–20 (2016).
Koonen, T. et al. High-Capacity Optical Wireless Communication Using Two-Dimensional IR Beam Steering. J. Light. Technol. 36, 4486–4493 (2018).
Muñoz-Ferreras, J.-M. & Gómez-García, R. Beam-steering radars at low cost. Nat. Electron. 3, Art. no. 2 (2020).
Smith, B., Hellman, B., Gin, A., Espinoza, A. & Takashima, Y. Single chip lidar with discrete beam steering by digital micromirror device. Opt. Express 25, 14732–14745 (2017).
Pernot, M., Aubry, J.-F., Tanter, M., Thomas, J.-L. & Fink, M. High power transcranial beam steering for ultrasonic brain therapy. Phys. Med. Biol. 48, 2577–2589 (2003).
Cook, D. A., Christoff, J. T. & Fernandez, J. E. Broadbeam multi-aspect synthetic aperture sonar. in MTS/IEEE Oceans 2001. An Ocean Odyssey. Conference Proceedings (IEEE Cat. No.01CH37295) 1, 188–192 (2001).
Van Veen, B. D. & Buckley, K. M. ‘Beamforming: a versatile approach to spatial filtering. IEEE ASSP Mag 5, 4–24 (1988).
C. Fischer, M. Goppelt, H.-L. Blöcher, and J. Dickmann, ‘Minimizing interference in automotive radar using digital beamforming’, in Advances in Radio Science, Copernicus GmbH, Jul. 2011. 45–48 https://doi.org/10.5194/ars-9-45-2011.
Oh, C. W., Cao, Z., Tangdiongga, E. & Koonen, T. Free-space transmission with passive 2D beam steering for multi-gigabit-per-second per-beam indoor optical wireless networks. Opt. Express 24, 19211–19227 (2016).
Cao, Z., Zhao, X., Soares, F. M., Tessema, N. & Koonen, A. M. J. 38-GHz Millimeter Wave Beam Steered Fiber Wireless Systems for 5G Indoor Coverage: Architectures, Devices, and Links. IEEE J. Quantum Electron. 53, 1–9 (2017).
Zhi, K., Pan, C., Ren, H. & Wang, K. Power Scaling Law Analysis and Phase Shift Optimization of RIS-Aided Massive MIMO Systems With Statistical CSI. IEEE Trans. Commun. 70, 3558–3574 (2022).
Fu, Z., Hornbostel, A., Hammesfahr, J. & Konovaltsev, A. Suppression of multipath and jamming signals by digital beamforming for GPS/Galileo applications. GPS Solut 6, 257–264 (2003).
R. J. Mailloux, Phased Array Antenna Handbook, Third Edition. Artech House, 2017.
Mumcu, G., Kacar, M. & Mendoza, J. Mm-Wave Beam Steering Antenna With Reduced Hardware Complexity Using Lens Antenna Subarrays’, IEEE. Antennas Wirel. Propag. Lett. 17, 1603–1607 (2018).
Reese, R. et al. A Millimeter-Wave Beam-Steering Lens Antenna With Reconfigurable Aperture Using Liquid Crystal. IEEE Trans. Antennas Propag. 67, 5313–5324 (2019).
Das, P., Mandal, K. & Lalbakhsh, A. Beam-steering of microstrip antenna using single-layer FSS based phase-shifting surface’. Int. J. RF Microw. Comput.-Aided Eng. 32, e23033 (2022).
Nishio, T., Xin, H., Wang, Y. & Itoh, T. ‘A frequency-controlled active phased array. IEEE Microw. Wirel. Compon. Lett. 14, 115–117 (2004).
J. Nemit, ‘Network approach for reducing the number of phase shifters in a limited scan phased array’, US3803625A, Apr. 09, 1974 Accessed: Aug. 22, 2022. [Online]. Available: https://patents.google.com/patent/US3803625A/en.
Li, Y., Iskander, M. F., Zhang, Z. & Feng, Z. ‘A New Low Cost Leaky Wave Coplanar Waveguide Continuous Transverse Stub Antenna Array Using Metamaterial-Based Phase Shifters for Beam Steering. IEEE Trans. Antennas Propag. 61, 3511–3518 (2013).
Avser, B., Pierro, J. & Rebeiz, G. M. Random Feeding Networks for Reducing the Number of Phase Shifters in Limited-Scan Arrays. IEEE Trans. Antennas Propag. 64, 4648–4658 (2016).
Avser, B., Frazita, R. F. & Rebeiz, G. M. Interwoven Feeding Networks With Aperture Sinc-Distribution for Limited-Scan Phased Arrays and Reduced Number of Phase Shifters. IEEE Trans. Antennas Propag. 66, 2401–2413 (2018).
Rupakula, B., Aljuhani, A. H. & Rebeiz, G. M. Limited Scan-Angle Phased Arrays Using Randomly Grouped Subarrays and Reduced Number of Phase Shifters. IEEE Trans. Antennas Propag. 68, 70–80 (2020).
Juárez, E. et al. An Innovative Way of Using Coherently Radiating Periodic Structures for Phased Arrays With Reduced Number of Phase Shifters. IEEE Trans. Antennas Propag. 70, 307–316 (2022).
Juarez, E., Panduro, M. A., Covarrubias, D. H. & Reyna, A. Simplification of Linear Beam-Forming Networks by Applying a Novel Phase Interpolation Technique. in IEEE Open Journal of Antennas and Propagation 5, 1714–1723 (2024).
Verho, S. & Chung, J.-Y. Design of a Compact and Minimalistic Intermediate Phase Shifting Feed Network for Ka-Band Electrical Beam Steering. Sensors 24, 1235 (2024).
Ehyaie, D. & Mortazawi, A. ‘A new approach to design low cost, low complexity phased arrays’, in 2010 IEEE MTT-S International Microwave Symposium, 2010. 1270–1273 https://doi.org/10.1109/MWSYM.2010.5517956.
Topak, E., Hasch, J., Wagner, C. & Zwick, T. ‘A Novel Millimeter-Wave Dual-Fed Phased Array for Beam Steering. IEEE Trans. Microw. Theory Tech. 61, 3140–3147 (2013).
Akbar, F. & Mortazawi, A. Scalable Phased Array Architectures With a Reduced Number of Tunable Phase Shifters. IEEE Trans. Microw. Theory Tech. 65, 3428–3434 (2017).
Akbar, F. & Mortazawi, A. ‘A K-Band Low-Complexity Modular Scalable Wide-Scan Phased Array’, in 2020 IEEE/MTT-S International Microwave Symposium (IMS), 2020. 1227–1230 https://doi.org/10.1109/IMS30576.2020.9224071.
Akbar, F. & Mortazawi, A. ‘Design of a scalable phased array antenna with a simplified architecture’, in 2015 European Microwave Conference (EuMC), Sep. 2015. 1427–1430 https://doi.org/10.1109/EuMC.2015.7346041.
W. Liu and S. Weiss, Wideband Beamforming: Concepts and Techniques. John Wiley & Sons, 2010.
Juarez, E., Panduro, M. A., Covarrubias, D. H. & Reyna, A. Simplification of Linear Beam-Forming Networks by Applying a Novel Phase Interpolation Technique. IEEE Open J. Antennas Propag. 5, 1714–1723 (2024).
Golub, G. H. & Reinsch, C. ‘Singular Value Decomposition and Least Squares Solutions’, in Linear Algebra, J. H. Wilkinson, C. Reinsch, and F. L. Bauer, Eds., in Handbook for Automatic Computation., Berlin, Heidelberg: Springer, 1971. 134–151 https://doi.org/10.1007/978-3-662-39778-7_10.
Vaswani, A. et al. ‘Attention is All you Need’, in Advances in Neural Information Processing Systems, Curran Associates, Inc., 2017. Accessed: Aug. 24, 2022. [Online]. Available: https://proceedings.neurips.cc/paper/2017/hash/3f5ee243547dee91fbd053c1c4a845aa-Abstract.html.
Tan, M. & Le, Q. ‘EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks’, in Proceedings of the 36th International Conference on Machine Learning, PMLR, May 2019. 6105–6114. Accessed: Aug. 24, 2022. [Online]. Available: https://proceedings.mlr.press/v97/tan19a.html.
Graves, A. ‘Generating Sequences With Recurrent Neural Networks’, Jun. 05, 2014, arXiv: arXiv:1308.0850. https://doi.org/10.48550/arXiv.1308.0850.
Dosovitskiy, A. et al. ‘An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale’, Jun. 03, 2021, arXiv: arXiv:2010.11929. https://doi.org/10.48550/arXiv.2010.11929.
Kennedy, J. & Eberhart, R. Particle swarm optimization. in Proceedings of ICNN’95 - International Conference on Neural Networks 4, 1942–1948 (1995).
Loshchilov, I. & Hutter, F., ‘Fixing Weight Decay Regularization in Adam’, Feb. 2022, Accessed: Aug. 24, 2022. [Online]. Available: https://openreview.net/forum?id=rk6qdGgCZ.
Loshchilov, I. & Hutter, F. “Fixing Weight Decay Regularization in Adam,” (arXiv:1711.05101) — later version: “Decoupled Weight Decay Regularization,” ICLR 2019.
Acknowledgements
This work is supported by the National Science and Technology Major Project of China (No.2025ZD1302100).
Author information
Authors and Affiliations
Contributions
Z. Cao conceived the idea of DRCAO-PAA, the use of AI to empower the LIVG search process and led the theoretical analysis and the numerical simulation. S. Xia led the experimental research, designed the AI algorithm, and performed the numerical simulation. M. Zhao contributes to the theoretical analysis, numerical simulation, and design of the antenna array. Q. Ma led and performed the design and realization of the phase shifter board. X. Zhang and L. Yang led and performed the research on the antenna array. H. Chung contributed to the design of the phase shifter board. F. Li and Yazhi Pi supervised the research on the compatibility in communication system. Ad Reniers led the far-field pattern measurement of DRCAO-PAA. A.M.J. Koonen led the whole research and guided the paper writing. All authors contributed to the data discussion and wrote the paper.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Engineering thanks Hong Soo Park and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. Primary Handling Editors: [Miranda Vinay, Anastasiia Vasylchenkova, Rosamund Daw]. [A peer review file is available].
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Xia, S., Zhao, M., Ma, Q. et al. Dimensionality reduced antenna array for beamforming/steering. Commun Eng 5, 38 (2026). https://doi.org/10.1038/s44172-026-00588-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s44172-026-00588-6
