
Abstract
This article presents a control-oriented low-altitude wireless network (LAWN) that integrates near-ground communications with remote system state estimation, enabling reliable networked control in dynamic aerial-ground environments. We introduce the network’s modular architecture, key performance metrics, and core design trade-offs across control, communication, and estimation layers. A case study demonstrates closed-loop coordination, and we outline future directions for scalable, resilient LAWN deployments in resource-constrained scenarios.
Similar content being viewed by others

Introduction
The rapid advancement of the Internet of Things (IoT) has expedited the implementation of distributed control systems in industrial, urban, and autonomous contexts. These applications impose stringent requirements on wireless networks, demanding exceptional reliability, ultra-low latency, and adaptability to highly dynamic environments1,2. In response to these requirements, low-altitude wireless networks (LAWNs) have emerged as a mobility-enhanced communication framework that incorporates drones, near-ground wireless connections, and distributed agents to facilitate delay-sensitive activities3,4,5. By leveraging drone mobility and adaptable deployment, LAWNs not only sustain dynamic line-of-sight (LoS) connectivity in intricate surroundings but also enhance wireless coverage in areas with limited infrastructure. As illustrated in Fig. 1, LAWNs facilitate control-critical applications, including intelligent transportation, cooperative robotics, and large-scale inspection, where dynamic environments, stringent latency, and evolving agent behaviours require precise control coordination6,7.

Drones form an adaptive aerial network comprising drone-to-drone (D2D) and drone-to-ground/ground-to-drone (D2G/G2D) links, enabling coordinated communication, control, and remote estimation in diverse low-altitude environments.
In LAWN-based systems, the entire control loop relies on feedback regulation of dynamical agents, integrating sensing, estimation, decision-making, and actuation within a mobile, entirely wireless framework8,9,10. Drones actively monitor ground agents, estimate their states utilising filters, compute commands through techniques such as linear quadratic regulation (LQR) or model predictive control (MPC), and relay control actions via wireless connections11,12,13. Thus, LAWN systems empower drones to dynamically prioritise agents with intricate trajectories, restricted observability, or urgent requirements, attaining precise latency adaptation and spatial flexibility that static or pre-coordinated architectures cannot provide14,15.
Notwithstanding the architectural potential of LAWNs, most existing control-oriented implementations still treat communication, estimation, and control as loosely interconnected modules16. The related control techniques frequently assume fixed-delay channels, disregarding latency fluctuations caused by mobility, fading, and obstacles17. Communication protocols mainly enhance link-level metrics such as throughput, energy, or coverage, while overlooking the timing guarantees and stability margins essential for closed-loop control, which leads to delayed or dropped commands that undermine responsiveness18,19. Similarly, estimation schemes often rely on complete observations at regular intervals, which are not robust under packet loss and asynchronous updates20. Comparable integration efforts, such as those in communications, navigation, and surveillance (ICNS), demonstrate the importance of unifying heterogeneous functions but remain largely constrained to application-specific domains like navigation or safety services21. This limitation, together with the modular treatment of communication, estimation, and control in LAWNs, motivates the perspective advanced in this article: a broader and system-level framework where communication and estimation are designed in direct service of control and their inherent trade-offs are jointly addressed.
This article introduces a cohesive framework that incorporates communication and remote estimation into the feedback loop, driven by the necessity for control-oriented integration in LAWNs. We commence by delineating a modular system architecture and determining various critical performance indicators pertinent to control-driven LAWN operation. Classical control systems are re-evaluated in distributed, delay-prone contexts to assess their limits in LAWN environments, including susceptibility to estimation inaccuracies, exposure to packet loss, and diminished robustness during asynchronous updates. This study analyses two fundamental trade-offs to characterise the relationship between wireless restrictions and control behaviour. We subsequently examine distant state estimation amid packet loss and asynchronous sampling. An example case study illustrates the simultaneous optimisation of control, estimation, and communication within reliability limitations. Ultimately, we emphasise prospective research avenues for attaining scalable, adaptive, and resilient networked control utilising LAWNs.
LAWN architecture
In this section, we present a conceptual overview of control-oriented LAWNs by outlining their fundamental components and key performance indicators, as depicted in Fig. 2.

A unified architecture of an LAWN system, comprising remote estimation, control, and communication modules.
Components
Plant
The plant represents the dynamic system being controlled, which could be a ground robot, an automated guided vehicle (AGV), or, in certain configurations, a drone. In LAWNs, the plant can consist of multiple distributed agents, such as drones, ground vehicles, or sensor nodes. Each agent exhibits distinct dynamic behaviors and varying levels of communication accessibility. Mathematical models of plant behavior are usually created using stochastic differential equations or discrete-time models.
Controller
The controller generates control inputs to direct the plant towards a specified state22. The controller may be located on the drone, a ground node, or a cloud server, contingent upon the system design. The design must consider both plant dynamics and wireless network limitations, specifically communication delays and link unreliability.
Estimator
The estimator is responsible for inferring the internal state of the plant based on noisy or delayed measurements23. In LAWN settings, state estimation must account for the stochastic nature of wireless channels, including packet loss, variable delay, and feedback sparsity. Depending on the system architecture, estimators may operate either onboard the drone or at a remote edge controller.
Sensor
Sensors function as the primary interface between the physical environment and the LAWN architecture24. They collect raw data essential for state estimation, environmental perception, and control decision-making25. Common onboard sensors include cameras, LiDAR, radar, and inertial measurement units (IMUs), each presenting distinct trade-offs in accuracy, sensing range, and latency26.
Wireless links
Wireless links are a key part of the LAWN communication system, enabling estimation, control, and coordination among drones and ground agents27,28. In contrast to static networks, these connections demonstrate significant dynamism resulting from channel fading, node movement, and interference. Signal deterioration results from additive noise (e.g., thermal noise) and multiplicative effects (e.g., fading and Doppler shifts), requiring resilient architectures for estimation and control systems29. Three essential connection types are important to LAWN operation: D2D, D2G, and G2D30. D2D links, for instance, support inter-drone coordination and are strongly influenced by swiftly altering topologies and Doppler shifts, which impede stable collaboration. D2G links, such as those for transferring control commands from aerial nodes to ground agents, are susceptible to obstruction and elevation-dependent path loss, both of which diminish transmission reliability. G2D links, often responsible for uploading observational data, including video streams or LiDAR point clouds, are affected by channel contention, restricted uplink capacity, and asynchronous sampling periods. In practice, these links may operate over diverse frequency ranges, from sub-6 GHz to mmWave and even THz bands, whose distinct propagation characteristics further affect reliability, latency, and coverage in LAWN scenarios.
Performance metrics
A comprehensive assessment of the performance of a LAWN-based control loop system must consider multiple dimensions, including control effectiveness, communication efficiency, and estimation accuracy. This subsection introduces the key performance metrics that characterize the operational quality of control-oriented LAWN systems.
Control-oriented metrics
Control performance is generally measured by the control cost, which reflects the discrepancy between actual and desired system states, along with the effort needed to implement control inputs31. The control cost may also include penalties related to communication, such as energy consumption during transmission. The stability margin is a crucial metric that indicates the system’s capacity to sustain stability amid disturbances and imperfect feedback, especially in scenarios involving communication delays and data losses in wireless environments32.
Communication-centric metrics
Communication performance in LAWN systems is generally assessed using three primary metrics: latency, reliability, and throughput33. Latency refers to the delay experienced in the transmission of communication messages, control commands, or the reception of sensor data. Reliability denotes the likelihood that transmitted data is accurately received and within specified time constraints. Throughput measures the amount of data effectively transmitted across the network, which is crucial when managing multiple agents or high-resolution sensing data. These metrics are also central to ongoing wireless standards such as 5G and 5G-A URLLC, which provide representative benchmarks for the stringent requirements of LAWN operation.
Estimation quality metrics
The performance of estimation is primarily evaluated through mean squared error (MSE) and update frequency. The MSE quantifies the average deviation between estimated and actual system states, thereby directly impacting control quality34. Update frequency denotes the regularity with which the controller acquires new state information35. High update frequency is essential in dynamic environments, as delays or outdated estimates can severely affect system performance.
The fundamental elements of LAWNs, including the plant, controller, estimator, sensors, and wireless links, collectively define the structure and functionality of the control loop. The integration of performance metrics for control, communication, and estimation offers a comprehensive view of the design and operation of control-oriented LAWN systems.
Unified design in LAWN
In LAWNs, control, communication, and estimation are connected due to the underlying wireless architecture, as demonstrated in Fig. 2. This section analyses the interaction among these components by investigating representative control strategies, the impact of communication constraints on control performance, and the difficulties of remote state estimation across different system architectures and network conditions.
Control strategies
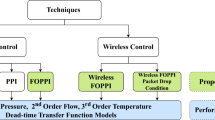
Control strategies in LAWN systems must operate under intermittent wireless connectivity, constrained onboard computation, and rapidly evolving environments. Classical techniques, including proportional-integral-derivative (PID), LQR, dynamic programming (DP), and MPC, have been adapted to address these challenges13. The performance comparison of these control strategies is presented in Table 1.
PID
PID controllers, based on proportional, integral, and derivative feedback, are suitable for low-level tasks such as attitude stabilization and velocity regulation. Their minimal computational cost and scalability make them practical for onboard control of individual drones36. In LAWNs, they are often used for stabilizing drone platforms under moderate communication disturbances. However, they lack robustness and adaptivity under severe delays or dynamic link conditions.
LQR
LQR optimizes a quadratic cost over linear dynamics and is effective for energy-efficient planning and coordinated formation control37. In LAWN settings, LQR is commonly applied in structured environments where full-state feedback is available through reliable communication. Its reliance on complete and accurate state information, however, limits its applicability in noisy or partially observable systems.
DP
DP computes globally optimal policies via Bellman recursion and supports long-term planning under uncertainty38. It has been applied in LAWN scenarios for scheduling and global path planning across large areas. Despite its optimality, its low scalability and heavy computation restrict its use in real-time, multi-agent control.
MPC
MPC performs real-time finite-horizon optimization and is well suited for trajectory tracking and dynamic obstacle avoidance in LAWN-based systems39. It offers strong robustness and flexibility under time-varying wireless conditions but requires high computational resources, often necessitating edge or cloud-based deployment.
Communication-control trade-offs
Building upon the discussed control strategies, communication quality is a critical factor influencing control performance in LAWN systems. As illustrated in Fig. 2, various metrics such as rate, power, and bandwidth can shape the trade-offs between communication and control. In this subsection, we focus on two representative trade-offs, i.e, rate-cost and delay-cost trade-offs, that have well-established analytical formulations and provide clear insight into the effect of wireless constraints on closed-loop behavior.
Rate-cost trade-off
The rate-cost trade-off illustrates the inverse relationship between transmission frequency and control performance40. In LAWNs, an increase in data rate improves estimation accuracy and control precision; however, this comes with the trade-off of elevated energy consumption and communication overhead41. Balancing communication scheduling with control strategy selection is crucial for optimising performance within resource constraints.
Delay-cost trade-off
Communication delay has a pronounced effect on control performance, particularly in systems with fast-changing dynamics. Even moderate delays (e.g., 30–50 ms) can significantly impair tracking accuracy and overall control quality42,43. In LAWNs, unpredictable transmission delays, arising from link quality and topology changes, necessitate delay-aware strategies such as dynamic scheduling and prioritization of critical data to maintain system stability and responsiveness.
Remote estimation
In control-oriented LAWNs, remote estimation plays a vital role in enabling informed decision-making among physically and functionally decoupled agents.
System configurations
Remote estimation scenarios frequently arise in LAWN environments where the estimator does not have direct access to the target system. Sensing and estimation functionalities are distributed among distinct agents in these scenarios. The sensor node, situated near the target, collects measurements and transmits them to the estimator through wireless links44.
Remote estimation mechanisms
Various methods are employed for remote estimation in LAWN systems. Kalman filtering is typically utilised in linear systems characterised by Gaussian noise, whereas adaptations like the extended Kalman filter (EKF) and the unscented Kalman filter (UKF) address moderate nonlinearity45. Particle filters (PF) are employed for systems characterised by high nonlinearity or non-Gaussian properties, although they entail significant computational costs. Distributed estimation, learning-based estimators, and graph-based fusion are utilised in scenarios involving multiple agents, enhancing performance while adhering to bandwidth and latency limitations46.
Communication-constrained estimation
As illustrated in Fig. 2, wireless communication limitations significantly affect remote estimation in LAWNs. Packet loss and delays, caused by fading, interference, or mobility, disrupt data flow and hinder timely state updates, leading to estimation errors47. Additionally, jamming attacks can disrupt critical data transmission, which is countered by secure strategies like randomized scheduling, multi-path redundancy, and secure coding48. Adaptive approaches, such as game-theoretic models, help agents adjust communication strategies based on interference, maintaining estimation accuracy in adversarial conditions.
The integration of control, communication, and estimation in LAWN systems necessitates a unified design paradigm. By analyzing the control strategies, characterizing control-communication performance trade-offs, and investigating the challenges of remote estimation under network constraints, this section articulates the need for principled co-design approaches that ensure robust, efficient, and scalable operation in dynamic and distributed environments.
Case study: outage-aware predictive control
This section introduces a representative case study that illustrates the interplay among control, communication, and remote estimation in a multi-agent LAWN system.
System overview
Figure 3 depicts a LAWN-enabled wireless control architecture wherein an aerial drone orchestrates multiple AGVs through integrated estimation and control across a time-varying communication network. Each AGV is equipped with onboard or proximate sensors that relay motion-related data to the drone through uplink channels. The drone operates as a remote estimator and controller, reconstructing AGV states from incoming data and calculating control actions using an MPC framework. The actions are subsequently transmitted to the AGVs via downlink channels39.

One aerial drone controls multiple AGVs to perform trajectory tracking tasks, integrating remote state estimation and wireless communication.
Predictive control over wireless links
The control performance is affected by the design of the control algorithm, the quality of remote state estimation, and the reliability of wireless transmissions. Inaccurate state reconstruction may result from delayed, noisy, or incomplete observation data, subsequently reducing the efficacy of control decisions. Moreover, variations in downlink quality may hinder the prompt transmission of control commands to the AGVs. We implement an adaptive control strategy that utilises the MPC framework to assess future trajectories, integrating the confidence level of current state estimates. With an increase in estimation uncertainty, the controller implements more conservative measures to maintain system stability20. AGVs implement a fallback mechanism that utilises locally generated predictions based on previous control inputs, allowing for uninterrupted operation when updated commands are unavailable due to communication or estimation failures49.
Results
Simulations
We consider a drone-assisted wireless control scenario in a multi-agent LAWN setup, where the drone hovers at a fixed altitude of 50 m and adjusts its horizontal position to assist four AGVs in motion tracking. The wireless channel is modeled as a probabilistic LoS channel, which accounts for both LoS and non-line-of-sight (NLoS) links50. Moreover, due to the relatively low velocity of the drone, Doppler effects are neglected, as their impact on the communication performance is minimal51. To highlight the effectiveness of the proposed framework, the results compare the MPC-based strategy with baseline controllers such as PID12,13. We can observe that the drone dynamically adjusts its trajectory to assist AGVs during complex maneuvers, maintaining robust tracking performance across varying transmit power levels and sensing conditions, as shown in Fig. 3.
AirSim platform-based experiment
To further evaluate system performance under realistic conditions, the full control, estimation, and communication loop is implemented in the AirSim platform52. The simulation environment includes multiple weather effects, with 20% rain and snow, 30% road wetness, and 15% fog. Wind speed and direction are at 2, 2.5, and 0 m/s along the X, Y, and Z axes, respectively. In the AirSim-based experiment, these intensities are normalized parameters that directly affect visibility, sensor accuracy, and vehicle dynamics, thereby enabling a more realistic evaluation of LAWN robustness under adverse environments. As illustrated in Fig. 3, the proposed approach maintains stable performance under challenging conditions, demonstrating robustness to physical disturbances and tracking delays.
Future directions
In this section, we outline four key research directions that can enhance the scalability, responsiveness, and robustness of control-oriented LAWNs in dynamic and resource-constrained environments.
Security, resilience, and fault tolerance
As aerial-ground interaction intensifies, LAWNs face growing risks of eavesdropping, spoofing, and jamming, especially in adversarial environments53. The dynamic topology and limited onboard resources hinder the use of conventional security schemes54. Future efforts should explore lightweight encryption, spread-spectrum techniques, and cross-layer authentication tailored to real-time control. In parallel, resilience and fault tolerance are vital to sustain operation under link failures or node compromise55. Mechanisms such as adaptive reconfiguration and redundant encoding help preserve system integrity and control performance under disruptions.
Delay-sensitive control
Wireless delays induced by drone mobility, interference, and fluctuating traffic loads can degrade control stability and responsiveness. To satisfy real-time constraints, delay-sensitive design must encompass both the physical and network layers16. Techniques such as short control frames, Doppler-resilient waveforms, adaptive retransmissions, and latency-aware scheduling can mitigate timing disruptions. A unified treatment of latency across communication and control is essential to ensuring reliable and timely feedback loops.
ISAC-enabled LAWN
Integrated sensing and communication (ISAC) has emerged as a promising paradigm for joint hardware reuse, spectrum efficiency, and real-time environmental awareness56,57. In LAWN systems, ISAC can significantly enhance control performance by enabling accurate situational awareness under stringent payload and energy constraints. Future research should investigate ISAC-based channel estimation, target tracking, and control-aware waveform design to support low-latency, closed-loop feedback in mobility-driven applications.
Energy-aware design
Stable control in LAWNs requires not only timely communication, sensing, and estimation, but also sustained energy availability58. As drones execute continuous estimation and actuation, energy depletion can lead to degraded responsiveness or control interruptions. Integrating wireless power transfer (WPT) into LAWN operations offers a promising path to support persistent control under mobility constraints59. Future designs should consider energy availability as a constraint in control policies, ensuring robustness even under limited onboard power.
Distributed coordination
In large-scale deployments, centralized control becomes increasingly impractical due to bandwidth limitations and computational bottlenecks. Control should be decentralised among agents functioning under conditions of partial observability and asynchronous communication60. Research should prioritise decentralised estimation, consensus-based coordination, and event-triggered control updates. The main goal is to attain low-overhead, high-reliability control among spatially distributed drones and ground nodes.
AI-driven adaptation
LAWN systems must be capable of adapting to rapidly changing environments and uncertain dynamics. Although learning-based approaches show great potential, their computational and latency requirements must align with the resource constraints of drone platforms61. Future research should focus on efficient learning models, such as compressed neural networks and federated reinforcement learning, to enable onboard adaptation. In addition, explainability and certifiability remain critical challenges for AI-driven methods, particularly in safety-critical control loops of applications such as passenger-transport eVTOLs62. Endowing aerial agents with robust, real-time, and trustworthy AI capabilities will be essential to sustaining autonomous control in complex and dynamic environments.
Conclusion
This article presented a unified perspective on LAWNs, which integrate control, communication, and remote estimation in order to support real-time operations within dynamic environments. It discussed the core architecture, system components, and fundamental trade-offs, and illustrated their interplay through a representative case study. LAWNs offer a scalable infrastructure for networked control systems by enabling responsive and reliable coordination among distributed agents. Looking ahead, advancing the capabilities of control-oriented LAWNs will depend on progress in latency-aware communication, decentralized decision-making, and lightweight adaptive intelligence.
Data availability
Not applicable.
References
Li, S., Xu, L. D. & Zhao, S. The internet of things: a survey. Inf. Syst. Front. 17, 243–259 (2015).
Yang, C., Shen, W. & Wang, X. The internet of things in manufacturing: key issues and potential applications. IEEE Syst. Man Cybern. Mag. 4, 6–15 (2018).
Motlagh, N. H., Taleb, T. & Arouk, O. Low-altitude unmanned aerial vehicles-based internet of things services: comprehensive survey and future perspectives. IEEE Internet Things J. 3, 899–922 (2016).
Hurst, W., Evmorfos, S., Petropulu, A. & Mostofi, Y. Uncrewed vehicles in 6G networks: a unifying treatment of problems, formulations, and tools. Proc. IEEE 1–35 (2025).
Wu, J. et al. Low-altitude wireless networks: a survey. arXiv preprint arXiv:2509.11607 (2025).
Oubbati, O. S., Lakas, A., Lorenz, P., Atiquzzaman, M. & Jamalipour, A. Leveraging communicating uavs for emergency vehicle guidance in urban areas. IEEE Trans. Emerg. Top. Comput. 9, 1070–1082 (2019).
Boursianis, A. D. et al. Internet of things (IoT) and agricultural unmanned aerial vehicles (UAVs) in smart farming: a comprehensive review. Internet Things 18, 100187 (2022).
Zhao, G., Imran, M. A., Pang, Z., Chen, Z. & Li, L. Toward real-time control in future wireless networks: communication-control co-design. IEEE Commun. Mag. 57, 138–144 (2018).
Wu, J., Yuan, W., Cheng, Q. & Jin, H. Towards dual-functional LAWN: Control-aware system design for aerodynamics-aided UAV formations. IEEE J. Sel. Areas Commun. 1–14 (2025).
Zhang, X.-M. et al. Networked control systems: a survey of trends and techniques. IEEE/CAA J. Autom. Sin. 7, 1–17 (2020).
Ovsthus, K., Kristensen, L. M. et al. An industrial perspective on wireless sensor networks—a survey of requirements, protocols, and challenges. IEEE Commun. Surv. Tutor. 16, 1391–1412 (2014).
Zhang, D., Han, Q.-L. & Jia, X. Network-based output tracking control for a class of TS fuzzy systems that can not be stabilized by nondelayed output feedback controllers. IEEE Trans. Cybern. 45, 1511–1524 (2014).
Wang, Y., Wu, S., Lei, C., Jiao, J. & Zhang, Q. A review on wireless networked control system: the communication perspective. IEEE Internet Things J. 11, 7499–7524 (2024).
Campion, M., Ranganathan, P. & Faruque, S. UAV swarm communication and control architectures: a review. J. Unmanned Veh. Syst. 7, 93–106 (2018).
Zhao, S., Wang, X., Lin, Z., Zhang, D. & Shen, L. Integrating vector field approach and input-to-state stability curved path following for unmanned aerial vehicles. IEEE Trans. Syst. Man Cybern.: Syst. 50, 2897–2904 (2020).
Jin, H., Wu, J., Yuan, W., Liu, F. & Cui, Y. Co-design of sensing, communications, and control for low-altitude wireless networks.IEEE Trans. Mob. Comput. 24, 12035–12048 (2025).
Tsumura, K. & Maciejowski, J. Lewis, F. L. (ed.) Stabilizability of SISO control systems under constraints of channel capacities. (ed.Lewis, F. L.) 42nd IEEE International Conference on Decision and Control (IEEE Cat. No. 03CH37475), 193–198 (IEEE, Maui, HI, USA, 2003).
Cao, J., Khan, S., Liu, W., Li, Y. & Vucetic, B. Remote UGV control via practical wireless channels: a model predictive control approach. IEEE Trans. Intell. Veh. 1–13 (2024).
Liu, H. et al. Stacked intelligent metasurfaces for wireless communications: applications and challenges. IEEE Wirel. Commun. 32, 46–53 (2025).
Huang, K., Liu, W., Shirvanimoghaddam, M., Li, Y. & Vucetic, B. Real-time remote estimation with hybrid ARQ in wireless networked control. IEEE Trans. Wirel. Commun. 19, 3490–3504 (2020).
Ullah, M. A. et al. Wisdom, A. (ed.) 5G integrated communications, navigation, and surveillance: A vision and future research perspectives. (ed.Wisdom, A.) 2025 Integrated Communications, Navigation and Surveillance Conference (ICNS), 1–13 (IEEE, Brussels, Belgium, 2025).
Lewis, F. L., Vrabie, D. & Syrmos, V. L. Optimal Control (John Wiley & Sons, 2012).
Schenato, L., Sinopoli, B., Franceschetti, M., Poolla, K. & Sastry, S. S. Foundations of control and estimation over lossy networks. Proc. IEEE 95, 163–187 (2007).
Xu, G., Shen, W. & Wang, X. Applications of wireless sensor networks in marine environment monitoring: a survey. Sensors 14, 16932–16954 (2014).
Wu, J. et al. SDR-empowered environment sensing design and experimental validation using OTFS-ISAC signals. IEEE Trans. Mob. Comput. 24, 16932–16954 (2025).
Liu, W., Haardt, M., Greco, M. S., Mecklenbräuker, C. F. & Willett, P. Twenty-five years of sensor array and multichannel signal processing: a review of progress to date and potential research directions. IEEE Signal Process Mag. 40, 80–91 (2023).
Niyato, D., Kim, D. I., Maso, M. & Han, Z. Wireless powered communication networks: research directions and technological approaches. IEEE Wirel. Commun. 24, 88–97 (2017).
Ali, M. A. & Jamalipour, A. Dynamic aerial wireless power transfer optimization. IEEE Trans. Veh. Technol. 71, 4010–4022 (2022).
Wu, J. et al. Low-complexity minimum BER precoder design for ISAC systems: a delay-Doppler perspective. IEEE Trans. Wirel. Commun. 24, 1526–1540 (2025).
Yuan, W. et al. From ground to sky: architectures, applications, and challenges shaping low-altitude wireless networks. arXiv preprint arXiv:2506.12308 (2025).
Jelali, M. An overview of control performance assessment technology and industrial applications. Control Eng. Pract. 14, 441–466 (2006).
Kim, Y. On the stability margin of networked dynamical systems. IEEE Trans. Autom. Control 62, 5451–5456 (2017).
Soret, B., Mogensen, P., Pedersen, K. I. & Aguayo-Torres, M. C. Fundamental tradeoffs among reliability, latency and throughput in cellular networks. In Proceedings of Globecom 2014, 1391–1396 (Institute of Electrical and Electronics Engineers (IEEE), 2014).
Hahn, J., Hausman, J. & Kuersteiner, G. Estimation with weak instruments: accuracy of higher-order bias and MSE approximations. Econometr. J. 7, 272–306 (2004).
Yates, R. D. et al. Age of information: an introduction and survey. IEEE J. Sel. Areas Commun. 39, 1183–1210 (2021).
Knospe, C. Pid control. IEEE Control Syst. Mag. 26, 30–31 (2006).
Cao, Y. & Ren, W. Optimal linear-consensus algorithms: an LQR perspective. IEEE Trans. Syst. Man Cybern. Part B Cybern. 40, 819–830 (2009).
Bellman, R. The theory of dynamic programming. Bull. Am. Math. Soc. 60, 503–515 (1954).
Jin, H. et al. Predictive control over LAWN: joint trajectory design and resource allocation. Preprint at https://arxiv.org/abs/2507.02374 (2025).
Jin, H. et al. OTFS-assisted wireless control in UAV networks with finite blocklength transmission. In 2025 IEEE Wireless Communications and Networking Conference (WCNC), (ed. Huang, K.) 01–06 (IEEE, Milan, Italy, 2025).
Kostina, V. & Hassibi, B. Rate-cost tradeoffs in control. IEEE Trans. Autom. Control 64, 4525–4540 (2019).
Zhang, J. & Wang, C.-C. On the rate-cost of Gaussian linear control systems with random communication delays. In 2018 IEEE International Symposium on Information Theory (ISIT) 2441–2445 (2018).
Zhu, J. et al. Joint optimization of user scheduling, rate allocation, and beamforming for RSMA finite blocklength transmission. IEEE Internet Things J. 11, 27904–27915 (2024).
Tang, M., Cai, S. & Lau, V. K. Radix-partition-based over-the-air aggregation and low-complexity state estimation for IoT systems over wireless fading channels. IEEE Trans. Signal Process. 70, 1464–1477 (2022).
Konatowski, S., Kaniewski, P. & Matuszewski, J. Comparison of estimation accuracy of EKF, UKF and PF filters. Annu. Navig. 23, 69–87 (2016).
Pazho, A. D. et al. A survey of graph-based deep learning for anomaly detection in distributed systems. IEEE Trans. Knowl. Data Eng. 36, 1–20 (2023).
Sun, Y., Polyanskiy, Y. & Uysal-Biyikoglu, E. Remote estimation of the wiener process over a channel with random delay. In 2017 IEEE International Symposium on Information Theory (ISIT), (ed. Durisi, G.) 321–325 (IEEE, Aachen, Germany, 2017).
Guo, Z., Shi, D., Johansson, K. H. & Shi, L. Optimal linear cyber-attack on remote state estimation. IEEE Trans. Control Netw. Syst. 4, 4–13 (2016).
Ishii, K. MPC based power allocation for reliable wireless networked control systems. IEEE Access 9, 60913–60922 (2021).
Zhao, C. et al. Temporal spectrum cartography in low-altitude economy networks: a generative AI framework with multi-agent learning. arXiv preprint arXiv:2505.15571 (2025).
Xiao, Z., Xia, P. & Xia, X.-G. Enabling UAV cellular with millimeter-wave communication: potentials and approaches. IEEE Commun. Mag. 54, 66–73 (2016).
Madaan, R. et al. Wallach, H. (ed.) Airsim drone racing lab. (ed.Wallach, H.) Neurips 2019 competition and demonstration track, 177–191. PMLR (ML Research Press, Vancouver, Canada, 2019).
Jun, W. et al. Aerial-networked ISAC-empowered collaborative energy-efficient covert communications. Chin. J. Aeronaut. 38, 103451 (2025).
Wu, J., Yuan, W. & Hanzo, L. When UAVs meet ISAC: real-time trajectory design for secure communications. IEEE Trans. Veh. Technol. 72, 16766–16771 (2023).
Wang, B., Zhang, B. & Su, R. Optimal tracking cooperative control for cyber-physical systems: dynamic fault-tolerant control and resilient management. IEEE Trans. Ind. Inf. 17, 158–167 (2020).
Liu, F. et al. Integrated sensing and communications: toward dual-functional wireless networks for 6G and beyond. IEEE J. Sel. Areas Commun. 40, 1728–1767 (2022).
Wu, J. et al. Toward multi-functional LAWNs with ISAC: opportunities, challenges, and the road ahead. arXiv preprint arXiv:2508.17354 (2025).
Khan, M., Silva, B. N. & Han, K. Internet of things based energy aware smart home control system. IEEE Access 4, 7556–7566 (2016).
Clerckx, B., Kim, J., Choi, K. W. & Kim, D. I. Foundations of wireless information and power transfer: theory, prototypes, and experiments. Proc. IEEE 110, 8–30 (2022).
Lin, Z., Wang, L., Han, Z. & Fu, M. Distributed formation control of multi-agent systems using complex Laplacian. IEEE Trans. Autom. Control 59, 1765–1777 (2014).
Zhao, C. et al. Generative AI-enabled wireless communications for robust low-altitude economy networking. arXiv preprint arXiv:2502.18118 (2025).
Zaid, A. A., Belmekki, B. E. Y. & Alouini, M.-S. eVTOL communications and networking in UAM: requirements, key enablers, and challenges. IEEE Commun. Mag. 61, 154–160 (2023).
Author information
Authors and Affiliations
Contributions
H.J. and W.Y. conceived the overall research framework and designed the study. H.J., J.W., and W.Y. wrote the main manuscript text. J.W., J.C.W., and D.N. conducted the simulations and developed the case study in the AirSim platform. X.B.W., G.K.K., and Z.L. contributed to the design of the LAWN architecture and key performance metrics. Y.G., D.I.K., and A.P. provided expertise in the communication protocols and wireless link performance. M.S.G., A.J., and S.S. assisted with the analysis of estimation techniques and their integration into the control loop. All authors reviewed and approved the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Jin, H., Yuan, W., Wu, J. et al. Advancing the control of low-altitude wireless networks: architecture, design principles, and future directions. npj Wirel. Technol. 2, 2 (2026). https://doi.org/10.1038/s44459-025-00010-1
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s44459-025-00010-1
