
Abstract
This study introduces an advanced adaptive control (AAC) technique featuring a synchronizing controller capable of identifying different operational modes—grid-following and grid-forming—while ensuring enhanced energy management in hybrid microgrid systems (HMGs) through seamless transition operations. In grid-following mode, a dual-tree wavelet transform (DTWT)-based current control strategy is implemented to facilitate parallel inverter operation and significantly enhance power quality (PQ) by isolating fundamental active currents from non-linear loads. In grid-forming mode, the synchronizing controller enables a smooth transition from current control to voltage control, thereby ensuring stable and coordinated inverter functionality. To address power shortages and fluctuations in photovoltaic (PV) generation, an innovative battery control strategy is employed, utilizing the PV maximum power point tracking (MPPT) voltage output, and governed by the proposed AAC scheme. The effectiveness of the proposed approach is validated through both simulation and real-time testing using the Typhoon HIL-402 platform under various scenarios, including inverter failure, sudden generation variations, and operational mode transitions. In software-based validation, the proposed DTWT-AAC achieves significant PQ enhancement, with total harmonic distortion (THD) reductions resulting in PQ improvements of 99.54% during inverter-1 failure, 99.82% under variable generation, and 99.59% during grid-following to grid-forming transition. Moreover, the average synchronization times under these respective conditions are notably low—0.03 s, 0.032 s, and 0.02 s. In real-time validation, when compared to the conventional discrete wavelet transform-based adaptive control (DWT-AC), the proposed DTWT-AAC delivers marked improvements: THD is reduced from 35.2% (uncontrolled) and 5.3% (DWT-AC) to 1.9%, while synchronization response time is improved from 0.9 s (DWT-AC) to 0.2 s (DTWT-AAC). These findings confirm the proposed method’s superiority in terms of PQ, dynamic stability, and robustness, making it highly suitable for real-time applications and scalable future grid-integrated microgrid deployments.
Similar content being viewed by others
Introduction
Recently, PQ maintenance has been an important issue in commercial and residential environments where different power generation plants and loads are used1,2. The interesting thing is that harmonic currents produced by non-linear loads always cause distortion of the linear voltage at the PCC, which deteriorates the grid performance. This distortion spreads through supply currents at the PCC, thereby degrading the voltage profile for other power users connected to the same PCC3. Deficient PQ adversely affects the non-linear loads, bringing about considerable losses of energy, which could be attributed to insufficient controller designs and the absence of clear data. Consumer and power engineers share a liability towards PQ within allowable standards. The harmonic current consumed by non-linear loads is manageable with controlled deviations of voltage that could surpass permissible limits4. Appropriate standard setting and observing these in terms of standardized benchmarks in PQ can help harmonize supply and demand besides system interruptions. Limitation of PQ within tolerable levels can reduce chances of malfunction in a system based on international standards.
PQ management is effective if the electrical power supply is diligently observed and PQ issues are accurately detected at PCC. Monitoring equipment often apply signal processing approaches like Empirical Mode Decomposition (EMD), Hilbert-Huang Transform (HHT), Kalman Filtering (KF), Artificial Neural Networks (ANN)5,6,7,8. EMD has been globally accepted in PV-battery based HMG applications for its ability to adaptively decompose non-linear and non-stationary signals into intrinsic mode functions (IMFs), which helps to detect PQ disturbances like voltage sags, swells, and harmonic distortions5. However, the integration faces challenges such as mode mixing, edge effects, and high computational demand, which reduces the overall efficiency of the HMG. In6, combining EMD with HHT spectral analysis delivers accurate time–frequency localization for transient or non-linearity detection in HMGs. Yet, its reliance on EMD indicates it inherits issues like noise sensitivity and computational incompetence, restricting its application in high-dynamic systems. KF has shown robustness in non-linear HMG conditions, specifically for real-time harmonic and voltage disturbance tracking7. Extended KF (EKFs) have been employed to supervise dynamic PQ variations in grid-following and grid-forming HMGs. However, its dependency on precise mathematical modeling and computational intensity restricts its adaptability in extremely uncertain microgrid circumstances8. ANNs have shown potential in pattern recognition and classification9, but their requirement for extensive training data and computational resources creates limitations in real-time and resource-constrained applications10.
Traditional WT-based controllers offer superior time–frequency resolution, effectively detecting disturbances such as voltage sags, swells, flickers, and non-linear distortions11. However, these suffer from shift variance and aliasing, limiting their applicability in renewable-integrated microgrid environments. To address this, the DTWT method is adopted in this study due to its improved shift invariance, reduced aliasing, and robustness in analyzing non-linear and non-stationary signals12. A comparative figure is provided in Fig. 1 to illustrate the performance difference between WT and DTWT.

Comparative figure between WT and DTWT.
Recent advances in HMG operation have focused on optimizing energy management and system resilience. In13, a dynamic energy management algorithm is proposed for a grid-interactive DC microgrid with hybrid storage, enhancing voltage regulation and storage longevity, though high-frequency dynamics remain a challenge. In14, a self-adaptive optimization algorithm for renewable and EV-integrated microgrids achieves cost and emission reductions but relies heavily on accurate EV behavior modeling. The authors in15 proposed optimizing hybrid renewable systems for isolated regions, focusing on economic efficiency while overlooking dynamic control issues. For instance,13 suggests a Model Predictive Control (MPC)-based technique for improved power management in hybrid wind-PV-battery systems, effectively handling real-time system data and enhancing operational reliability. However, its performance is mainly affected by a high computational burden, making it less applicable to practical large-scale microgrids. In14,15, droop control is used for dispersed power-sharing among parallel inverters, offering flexibility and ease of implementation but struggling with stability under high load variations and renewable fluctuations. Additionally,16,17 propose consensus-based distributed control to reduce reliance on centralized systems, enabling decentralized power monitoring. While promising, its applicability is limited by communication delays and scalability issues. In another instance,18 introduces an AI-based adaptive control using deep reinforcement learning for optimizing HMG operations. Although adaptive and predictive, it demands extensive training datasets and significant computational resources, impeding real-time application. Despite their value, these methods fail to widely address real-time synchronization, seamless mode transitions, and dynamic grid-support integration—highlighting the need for an advanced control framework.
Although significant progress has been made, several key research gaps remain: (1) most existing control strategies fail to ensure seamless transition between grid-following and grid-forming modes under dynamic conditions; (2) conventional signal processing methods like EMD and WT suffer from mode mixing, shift variance, and high computational complexity, limiting real-time application; (3) intelligent approaches such as ANN and deep learning are constrained by the need for large datasets and high processing requirements; and (4) existing techniques often do not effectively handle PQ issues under inverter failures or fluctuating renewable sources. These limitations necessitate a computationally efficient, real-time compatible, and flexible control solution capable of smooth mode transitions and robust PQ enhancement in HMGs.
The proposed contribution is structured as follows.
-
The study proposes a novel AAC technique equipped with a synchronizing controller that identifies and monitor the power flow between the operational modes, ensuring smooth seamless transitions and enhanced energy management in HMGs.
-
For grid-following mode, a DTWT-based current control strategy is implemented for parallel inverter operation in PV-battery HMG system, which effectively isolates fundamental active currents from non-linear loads, significantly improving PQ. For grid forming mode, the current control is switched to voltage control through a novel synchronizing controller and facilitates seamless transition operation.
-
To address power shortages and mitigate PV power fluctuations, the study integrates a battery control strategy that utilizes the PV MPPT voltage output, managed by the AAC technique.
-
The proposed method is validated through real-time HIL-402 platform testing under challenging scenarios, demonstrating superior reliability, PQ, and faster settling times compared to the conventional DWT-AC.
The structure of the manuscript is presented as follows: “PV-battery based hybrid microgrid design” section describes the design and configuration of the PV-battery based hybrid microgrid, including the modeling of key components and control requirements. “Advanced adaptive controller for better energy management” section introduces the proposed AAC scheme, detailing the synchronizing controller for mode identification, DTWT-based current control for grid-following mode, voltage control strategy for grid-forming mode, and the unified AAC-based inverter gate pulse controller enabling seamless transitions. “Result analysis” section presents a comprehensive result analysis, highlighting both simulation and real-time validations under various scenarios such as inverter failure, generation fluctuations, and mode transitions. Finally, “Conclusion” section concludes the work with key findings and outlines future directions.
PV-battery based hybrid microgrid design
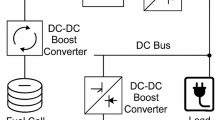
The proposed HMG setup incorporates a PV and battery-based hybrid system, equipped with a boost converter and a bidirectional converter seamlessly integrated into the DC grid. This configuration enables efficient battery charging and discharging while maintaining a balanced power flow between generation and demand.
For DC-to-AC power transfer, two inverters are connected in parallel, each capable of independent operation. This design supports both DC and AC grid operations. To evaluate power quality, a non-linear load is intentionally introduced in the AC grid operation. To achieve a linear output, the inverter output is filtered through an LC filter, as depicted in Fig. 2, enhancing power quality, and aligning the output with the grid frequency. System parameter ratings are detailed in the appendix. Power transfer from the PV-battery system to the 66 kV grid is facilitated through a 6.6 kV/66 kV transformer and a 5 km pi-line transmission line operating at a frequency of 60 Hz. The entire HMG operation adheres to the IEEE-519 and IEEE-2030.7 standards.

Advanced adaptive controller-based hybrid microgrid system design.
Advanced adaptive controller for better energy management
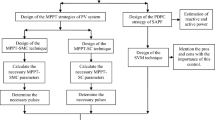
To provide an excellent energy management during different mode of operation, a detailed flowchart is illustrated in Fig. 3. Initially, the energy management approach checks the availability of green power generation. After checking the weather and day/night condition, the PV power generation capacity is determined. The overall operation is described below.

Advanced adaptive controller for better energy management during both mode of operation.
-
(1)
Check the power inequity among the variable generation and load demand
$${\text{If }}\left( {P_{Pv} - P_{l} } \right)\left\{ {\begin{array}{*{20}l} { = 0;} \hfill & {{\text{Halt}}\;Battery} \hfill \\ {\langle 0;} \hfill & {{\text{Check}}\;{\text{Step - 5}}} \hfill \\ {\rangle 0;} \hfill & {{\text{Check}}\;{\text{Step - 3}}} \hfill \\ \end{array} } \right.$$ -
(2)
Check the storage power accessibility by sensing the variable generation, load, and battery SOC.
$$if\;\left( {P_{Pv} - P_{l} + P_{b} \rangle P_{b,\max } } \right)\left\{ {\begin{array}{*{20}l} {True;} \hfill & {Check\;Step - 4} \hfill \\ {False;} \hfill & {Check\;Step - 3} \hfill \\ \end{array} } \right.$$ -
(3)
Check the SOC condition for charging the battery
$$if \, \left( {SOC_{b} \ge SOC_{b,\max } } \right)\left\{ {\begin{array}{*{20}l} {True;} \hfill & {{\text{Check}}\;{\text{Stage - 4}}} \hfill \\ {False;} \hfill & {{\text{Battery}}\;{\text{Charge}}} \hfill \\ \end{array} } \right.$$ -
(4)
Check external power availability and mode of operation.
$$if\;{\text{islanding}}\;{\text{condition}}\left\{ {\begin{array}{*{20}l} {True;} \hfill & {{\text{Decrease}}\;{\text{prodiuction}},\;{\text{Check Step - 8}}} \hfill \\ {{\text{False}};} \hfill & {{\text{Power}}\;{\text{transfer}}\;{\text{to}}\;{\text{grid}},\;{\text{Check Step - 8}}} \hfill \\ \end{array} } \right.$$ -
(5)
Check the SOC condition for discharging the battery.
$$if \, \left( {SOC_{b} \rangle SOC_{b,\min } } \right)\left\{ {\begin{array}{*{20}l} {True;} \hfill & {{\text{Battery}}\;{\text{discharge}}\;{\text{on,}}\;{\text{Check Step - 8}}} \hfill \\ {{\text{False}};} \hfill & {{\text{Battery}}\;{\text{dis - charge}}\;{\text{off,}}\;{\text{Check Step - 8}}} \hfill \\ \end{array} } \right.$$ -
(6)
Check \(if\left( {P_{Pv} - P_{l} + P_{b} } \right)\left\{ {\begin{array}{*{20}l} {\langle 0;} \hfill & {{\text{Check}}\;{\text{Step - 7}}} \hfill \\ { = 0;} \hfill & {{\text{Battery}}\;{\text{off,}}\;{\text{Check Step - 8}}} \hfill \\ {\rangle 0;} \hfill & {Battery\;off,\;{\text{Check Step - 8}}} \hfill \\ \end{array} } \right.\)
-
(7)
Check the mode of operation
$$if\;{\text{grid}}\;{\text{following}}\;{\text{mode}}\left\{ {\begin{array}{*{20}l} {True;} \hfill & {\text{Power transfer, Check Step - 8}} \hfill \\ {\text{False;}} \hfill & {\text{Decrease load, Check Step - 8}} \hfill \\ \end{array} } \right.$$ -
(8)
If any variation in load and production are identified, check all the process from (1) to (8).
where,\(P_{Pv}\),\(P_{l}\),\(P_{b}\) and \(P_{b,\max }\) is represented as the solar power generation, variable load demand, storage power and maximum battery power of the undertaken system.\(SOC_{b}\) is the state of charge of the battery. \(SOC_{b,\min }\) and \(SOC_{b,\max }\) is the minimum and maximum \(SOC_{b}\).
AAC based novel inverter gate pulse controller
In this section, the complete inverter control operation is described for both mode of operation such as grid connected and grid forming operation as illustrated in Fig. 4. From Fig. 4, it can be concluded that the current controller is applicable for grid following operation and voltage controller is applicable for grid forming operation. In addition to that, a novel synchronization technique is proposed for seamless transition between the modes. The detailed analysis regarding the controller is discussed below.

AAC based novel inverter gate pulse controller.
Grid following mode
During grid following mode, the proposed inverter control switched to current control mode for offering improved performance as depicted in Fig. 4 (i). As the system is integrated with the non-linear load, the important role of the controller is used to compute the average load current (\(I_{la}\)) by eliminating the harmonic components. In this proposed approach, to eliminate the non-linearity DTWT is used. This can be possible by segregating the complete non-linear signal into two components such as fundamental and harmonic components. This approach combines real and oscillating discrete wavelet transform for computing real and oscillating components by converting the time-based signals into sub discrete bands. In DTWT, the instantaneous current signals (\(I_{m} (t)\)) decomposes into approximate and detail parameters. Here, ‘m’ denotes the different phases of the current component.
In this context,\(\varphi\) represents the fundamental span, \(\psi\) represents the detailed span, a is the fundamental factor, is the detailed factor, \(p\) indicates the maximum approximate scale, and \(q\) stands for the maximum detail scale.
The expressions for the approximate and detailed terms in the DWT are given as follows:
While the DWT method yields good results, it has drawbacks like shift variance, folding, non-linearity, and absence of directionality. Addressing these challenges, the DTWT, utilizing complex fundamental \(\varphi_{c} (t)\) and detailed spans \(\psi_{c} (t)\), is recommended in.
Here,\(\varphi_{A} (t)\),\(\psi_{A} (t)\) and \(\varphi_{R} (t)\),\(\psi_{R} (t)\) represent the active and reactive span of the \(\varphi_{c} (t)\), and \(\psi_{c} (t)\), respectively. These active and reactive components are calculated using the Hilbert transform.
As shown in Fig. 5a, two parallel DWT with low-pass and high-pass filters at each decomposition level. These parallel discrete WT are labelled as active and reactive trees. In the active tree, the approximate coefficient (\(a_{pA,n}\)) and the detailed coefficient (\(d_{qA,n}\)) are determined as follows:

(a) Phase-a load current decomposition by DTWT, (b) the initial tree structure, and (c) imaginary tree by 2CDWT.
In a manner akin to the calculation for the actual tree constants, the oscillating exact constants (\(a_{pR,n}\)) and estimated constants (\(d_{qR,n}\)) are derived by adjusting \(\varphi_{R} (t)\) and \(\psi_{R} (t)\). The breakdown process can be implemented by iteratively determining the estimated and exact constraints are as follows:
Here, \({\text{m}} = {0,1,2,}.....{\text{y}}\), \(H_{0} (n)\), \(H_{1} (n)\), \(G_{0} (n)\) and \(G_{1} (n)\) represent the definite decomposition filters corresponding to \(\varphi_{A} (t)\), \(\psi_{A} (t)\), \(\varphi_{R} (t)\) and \(\psi_{R} (t)\), respectively. The corresponding filters must satisfy the following equations.
Each sensed non-linear load current undergoes individual processing using a DTWT to estimate its fundamental component. Two separate DWT decompositions compute the complex transform of each phase current, generating real and reactive coefficients known as active and reactive trees. Figure 5a depicts phase current decomposition levels at a 2.4 kHz sampling frequency. Figure 5b and c illustrate the initial tree of the considered signal and the imaginary tree obtained by the DTWT filter, respectively.
Figure 6a shows that the fourth-level coefficients of the imaginary tree yield the quadrature fundamental component in the 0–75 Hz frequency range. A global thresholding value of 42.5 ensures significant components are retained while minimizing noise. Figure 6b demonstrates the superior performance of the DTWT filter in preserving signal energy, retaining 97.58% of it. This underscores its effectiveness in capturing essential features and overall power. Additionally, the DTWT filter maintains 92.78% of signal integrity and periodicity, which is crucial for applications emphasizing zero crossings. This highlights the DTWT’s significance in harmonic elimination. A 2.4 kHz sampling frequency is chosen to minimize the computational load on the HIL-402 FPGA processor.

(a) Fundamental and detailed coefficients of DTWT, (b) Retained energy and number of zeros in % of DTWT.
The orthogonal fundamental reactive load current (\(I_{Rl,a} ,\) \(I_{Rl,b} ,\) and \(I_{Rl,c}\)), obtained from the imaginary tree for each phase, aligns with the tracked load current without taking more time. Employing this, the respective active load components (\(I_{Al,a} ,\) \(I_{Al,b} ,\) and \(I_{Al,c}\)) are computed. These active constraints are derived by utilizing the absolute magnitude of the projected reactive current at each zero crossing of the voltage unit phase templates. The mathematical representation of the complete extraction process for the phase ‘a’ load current component is described below. The phase ‘a’ PCC voltage (\(V_{pa}\)) and load current (\(I_{la}\)) components are presented as.
Here,\(V_{P}\) is the peak amplitude of \(V_{pa}\),\(I_{1} \sin (\omega t - \varphi )\) is the fundamental and \(I_{ha}\) is the harmonic \(I_{la}\) component. By using the DTWT,\(I_{Rl,a}\) is derived as
By using Eq. 18,\(I_{Al,a}\) can be obtained as.
Likewise, the other phases active current components are computed as \(I_{Al,b}\) and \(I_{Al,c}\), respectively. By considering all the active current component, the average current (\(I_{A}\)) component is computed as
After computing \(I_{A}\), the voltage unit template (\(V_{u}\)) is further computed to obtain the PCC voltage templates (\(T_{a} ,T_{b}\) and \({\text{T}}_{{\text{c}}}\)) as illustrated in Fig. 3 (i). From the three-phase voltage \(V_{p,abc}\) component, the \(V_{u}\) is computed as.
By using the peak \(V_{p,abc}\), \(T_{a} ,T_{b}\) and \({\text{T}}_{{\text{c}}}\) constraints are computed as.
The obtained \(T_{a} ,T_{b}\) and \({\text{T}}_{{\text{c}}}\) are used to estimate the PV feed forward current and reference current component for VSI pulse generation.
Specific to PV, to obtain maximum power most used I&C based maximum power point algorithm is used5. From the extracted maximum power component (\(P_{pv}\)), the feedforward current (\(I_{f}\)) is computed as.
By considering the maximum dc-link voltage (\(V_{dc}\)), a voltage regulator is developed to regulate the DC-link voltage at its rated value (\(V_{dc}^{*}\) = 500 V) through a PI controller. The constraints of the PI controller (\(K_{p,dc}\) and \(K_{i,dc}\)) are also determined, and the controller equation is formulated in the discrete-time domain as follows.
Here, \(V_{dc,e}\) is the error in voltage and \(I_{V}\) is the voltage regulator output. All the current components such as \(I_{A}\),\(I_{f}\) and \(I_{V}\) are further used to compute overall reference current magnitude (\(I_{M}\)) component and represented as
Further, \(I_{M}\) is used to compute the reference grid currents (\(I_{ga,r}\), \(I_{gb,r}\) and \(I_{gc,r}\)) for hysteresis current controller as illustrated in Fig. 4 (i) and computed as.
Grid forming mode
During grid forming mode, the proposed inverter control switched to voltage control mode for offering a stable load voltage regardless of change in environmental and load current as illustrated in Fig. 4 (ii). The logic for the load phase generation in the inverter control operation is illustrated in Fig. 6. Once the grid becomes accessible and its voltage surpasses 0.7 p.u., the phase extraction techniques align the load and grid voltage phase. This alignment is possible by using two PLLs, from which one is used for load voltages and another is used for grid voltages.
To smoothens the abrupt conditions, the phase difference among the grid voltages (\(V_{g}\)) and load voltages (\(V_{l}^{*}\)) are processed through a sine block as depicted in Fig. 3 (ii). The output of the sine block (\(\Delta \theta\)) is then fed to a PI controller, which extracts the frequency component (\(\Delta \omega_{l}\)) for 3-phase VSI operation.
After generating \(\Delta \omega_{l}\), it is added to the frequency components of load and then sent to the integer block for computing the phase components (\(\theta_{n}\)), which is used for reference load voltage computation (\(V_{l,abc}^{*}\)).
where, \(V_{l}^{*}\) is the reference load voltage and \(\theta_{n}\) is the computed phase angle. The \(V_{l}^{*}\) is multiplied by the sine of the phase angles for all 3-phases, computing the instantaneous \(V_{l,abc}^{*}\). Then \(V_{l,abc}^{*}\) are further compared with the sensed load voltages (\(V_{l,abc}^{{}}\)) to compute the reference load current component as depicted in Fig. 4 (ii). The performance of the HMG is regulated by a hysteresis current regulator during islanded mode of operation by generating the desired gating signals for VSI operation. The overall operation of the proposed controller depends upon a decision seamless transition logic technique to generate the gating signals based on the modes, whether it is operated in grid following or grid forming mode of operation.
During the transition from grid forming a grid following operation, a rate limiter is integrated into the current controller to limit the rate of flow of current fed into the grid as illustrated in Fig. 3 (i). The whole mechanism offers better seamless transition operation, which prevents sudden load current disturbances and improve the system stability.
Seamless transition
To provide a seamless transition between two mode of operation such as grid following to grid forming or vice versa, a novel synchronization technique is developed to operate the mode transfer switch (MTS), which select the voltage and current controller as illustrated in Fig. 4a. The developed synchronization technique is illustrated in Fig. 6 and the output operation is based upon the following four criteria:
-
Computation of the phase variation among the grid and load voltage.
-
Computation of the frequency variation among the grid and load voltage.
-
Computation of the voltage magnitude variation among the grid and load voltage.
-
Selection the mode of operation of HMG system.
As illustrated in Fig. 7, at grid forming conditions, the adaptive control technique illustrated in Fig. 3 continuously tracks the grid availability. On monitoring grid availability, the synchronization technique is acted by ensuring that:
-
Checking the phase variation among the grid and load voltages is fewer than 3°.
-
Checking the voltage magnitude variation does not surpass 0.05 p.u.
-
Checking the frequency variation remains less 0.3 Hz.

Novel Synchronization technique for seam-less transition.
The outcomes of the above conditions are passed through an AND logic gate, which safeguards that all conditions are concurrently gratified before moving towards grid following operation.
When the adaptive control algorithm senses grid following operation, similar conditions are further analysed for phase, frequency, and voltage variations. Nevertheless, in this condition, the acceptable voltage magnitude tolerance limit surges to 0.3 p.u. To offer a sustained synchronization, the above outcomes are passed through an AND logic gate. The outcomes from both AND gates (one for grid forming to grid following and other for grid following-grid forming) are afterward combined using an OR gate. The final synchronization decision denoted as MTS determines the appropriate mode selection such as.
-
MTS = 1: Grid-following condition.
-
MTS = 0: Grid forming condition.
The suggested synchronisation technique confirms excellent synchronization operation by considering the critical constraints, which enables smooth transition and stable system operation.
Comparative analysis between two modes of operation
This section clearly distinguishes between the Grid-Following and Grid-Forming modes of operation, as summarized in Table 1.
Battery charge controller
The Complete operation of the (BCC) monitor by the proposed AAC at both mode of operation through properly tracking the SOC of the battery and surplus/shortage of the power. The bidirectional buck-boost converter control approach is depicted in Fig. 8. The motive of this regulator is to balance the dc-link voltage by offering charging or discharging conditions of the battery. The proposed control is a dual loop controller consisting of both voltage and current controller loop10. The voltage control is proposed to balance the dc-link voltage and current control regulates the battery current. The voltage control is used to generate the battery reference current and the current control is used to produce the duty ratio for the converter as illustrated in Figs. 3 and 7.

Battery charge controller.
Result analysis
The proposed supervised control and harmonic control-based hybrid solar-battery based microgrid system depicted in Figs. 2 and 3 is assessed to improve PR and PQ under diverse operating situations. The complete test occurred in both simulated and real-time HIL-402 platform for providing complete justification to the significance of the controller during both grid integrated and islanded conditions. In simulated platform under grid connected mode different test cases such as resilience assessment at one inverter failure and dynamic performance at variation in generation is formulated. In addition to that, under islanded case also the PQ and stability of the developed system is tested. Moreover, to give proper justification, in HIL-402 real-time platform the same resilience assessment at one inverter failure is tested and compared with the traditional control approach. This outcomes in both platform guarantees the proposed contribution significance in real-time microgrid applications.
Study-1: grid following mode- resilience assessment during the top inverter failures
This study analyzes a hybrid solar-battery system under grid-supported conditions, with the battery’s SOC maintained between 20 and 90% for power balancing. The resilience assessment is focused on both normal and one of the VSI failure operations. In this setup, the grid power supports both battery storage charging and load demands, while the MG reliably delivers a rated output of 44 kW at 800 W/m2 irradiance. Initially for 0–0.2 s, the developed MG performs normal operation. At 0.2 s onwards, VSI-1 fails to operate for verifying the controller’s effectiveness and inverter coordination under fault. This scenario demonstrates improved reliability by meeting both the battery’s charging/discharging requirements and load demand, while showcasing the usefulness of the suggested control solution in enhancing PQ through significant harmonic reduction.
At fixed irradiance 800 W/m2 condition, the system generates a total 44 kW of active power and connected to the dc-grid. To transfer a total 40 kW active and 16kVar oscillating power from dc-grid to ac-grid two VSI’s are connected in Parallel as depicted in Fig. 2. As shown in Fig. 9a,b at 0–0.2 s, both inverters function normally, each contributing 20 kW of real and 8 kVar of oscillating power. Figure 9c,d depicts the active and oscillating power demands of considered harmonic loads, totalling 60 kW and 20kVar, respectively. To meet these demands, the grid supplements the hybrid output by supplying an additional 20 kW real and 4 kVar oscillating power, as depicted in Fig. 9e. Initially, the battery remains idle, preserving its lifespan. However, when necessary, the grid charges the battery based on its SOC conditions, as shown by the charging current and power in Fig. 9f,g. During that operation, the dc-grid voltage rapidly stabilizes at its rated 500 V, demonstrating the effectiveness of the undertaken control strategy by eliminating the need for voltage and frequency synchronization.

Active and Reactive Power: (a) VSI-1, (b) VSI-2, (c) Load-1, (d) Load-2 and (e) Grid; (f) DC voltage; Battery: (g) Current, (h) Power.
During 0.2 s time duration, top VSI experiences a failure, reducing its power output to zero. Figure 9b shows bottom VSI gradually increasing its output to compensate. During this transition, the grid ramps up its support, providing powers up to 50 kW real and 12 kVar oscillating as depicted in Fig. 9e, with 40 kW active and 12 kVar oscillating power used for load support and 10 kW active allocated for battery charging. Due to the disturbances at 0.2 s, the battery charging rate temporarily drops, with current and active power reduced to 20A and 10 kW, as depicted in Fig. 9f,g. By 0.25 s, lower VSI fully compensates for the failure of upper VSI, supplying the combined power previously shared by both VSIs i.e. 40 kW active and 16 kVar oscillating as depicted in Fig. 9b. This enables the grid and battery charging levels to return to their initial states, as depicted in Fig. 9e and g. The smooth restoration of voltage and power parameters confirms that the suggested approach enhances system reliability and minimizes response time.
For PQ analysis, Fig. 10a–d provides an in-depth look at the current characteristics. Figure 10a reveals that the load current is not sinusoidal, which negatively impacting system performance. However, the proposed controller effectively cancels the harmonics presence in the load current by supplying additional harmonics through VSIs in quadrature, resulting in linear, IEEE-519-compliant inverter and grid current waveforms, as depicted in Fig. 10b–d. Further harmonic analysis using FFT as depicted in Fig. 10e–h illustrates that the load initially contains a higher THD%, which is unacceptable for grid integration and power transmission as per the IEEE-519 standard. After implementing the suggested control, the harmonic content in the inverter and grid currents is substantially reduced, making the system suitable for practical use. As the outcomes of both power and current analyses demonstrate significant improved resiliencies, supporting the developed system applicability for real-time use.

Current: (a) Load-1 and 2, (b) VSI-1, (c) VSI-2, (d) Grid; THD% of Current: (e) Load-1 and 2 (f) VSI-1 (g) VSI-2 (h) Grid.
Study-2: Grid following mode- dynamic response at sudden variation in generation
This study evaluates hybrid solar-battery based performance under grid support when the battery SOC is at or near its lower threshold, specifically during rapid changes in irradiance unit. Grid power supports both load demand and battery charging, by considering the generation. For 0–0.25 s time duration, the irradiance is 600W/m2 and 0.25 s onwards the irradiance is suddenly changed to 800W/m2. During the change, the study assesses battery charging, load demand fulfilment, and generation stability without requiring additional synchronization control, demonstrating the proposed control solution effectiveness in maintaining the quality and stability.
The dynamic power and current responses of the studied hybrid solar-battery based microgrid systems are illustrated in Fig. 11a–h. Due to 600W/m2, the undertaken solar PV generates in a total power of 33 kW directed to the DC grid. Like Study-1, the DC and AC grids are linked through two parallel VSIs. As shown in Fig. 11a,b, the output power for upper and lower VSIs are balanced to transfer the 33 kW into 28 kW active and 16kVar oscillating power to meet load demand, with each VSI generating half of the total power during 0–0.25 s.

Active and Reactive Power: (a) VSI-1, (b) VSI-2, (c) Load-1, (d) Load-2 and (e) Grid; (f) DC voltage; Battery: (g) Current, (h) Power.
The total power demand of both the load one and two are shown in Fig. 11c,d, where the total load demand is 50 kW active and 20kVar oscillating power. During 0–0.25 s, including each VSI’s power generation, the main grid initially also supplies the rest 45 kW to fulfil the load and battery demand. With the increase in irradiance to 800W/m2, the grid support reduces to 40 kW at 0.25 onwards, as shown in Fig. 11e. Throughout the complete study, to maintain battery performance and extend battery life, the grid supplies current to charge the battery as per its SOC requirement, as depicted in Fig. 11f–h depicts that the dc- link of the inverter is stabilizing at its rated 500 V with minimal delay during the state change, demonstrating that the proposed control strategy achieves quick stabilization of power output without requiring any additional voltage or frequency synchronization.
At 0.25 s, due to the maximum irradiance the total power again increased to 44 kW. Figure 11a,b shows VSI-1 and VSI-2 returning to their rated output such as 20 kW active and 8kVar oscillating output power each, enabling the total generation to 40 kW active and 16kVar oscillating power, respectively. The grid provides the remaining 40 kW to meet load demand and charge the battery, with 30 kW allocated to battery charging. Battery current and power results in Fig. 11f,g confirm that the proposed controller improves PQ and voltage stability during the dynamic addition or removal of PMSGs, as evidenced by the steady dc-link voltage in Fig. 11h.
For further verification, Fig. 12a–d presents the current results, where the harmonic load current is shown in Fig. 11a. The observed harmonic current affects system performance, but the proposed controller effectively separates nonlinear and fundamental components. This harmonic elimination ensures grid and inverter currents are linear and meet IEEE-519 standards, as depicted in Fig. 12b–d. For the numerical analysis point of view, Fig. 12e–h show that the FFT analysis results, with Fig. 12e indicating higher harmonic content i.e. 20.6%, which is more excessive for distributed generation. The proposed method significantly reduces VSI and grid harmonics to acceptable levels for the microgrid operation, as shown in Fig. 12f–h. Overall, the analysis of current and power results confirms that the suggested control-based hybrid microgrid achieves substantial improvements in power quality and reliability, demonstrating its suitability for real-time applications.

Current: (a) Load-1 and 2, (b) VSI-1, (c) VSI-2, (d) Grid; THD% of Current: (e) Load-1 and 2 (f) VSI-1 (g) VSI-2 (h) Grid.
Study-3: islanding mode- enhanced stability and PQ
This study investigates a hybrid solar and battery based microgrid system, focusing on the system’s resilience and PQ during grid disconnection scenarios. With the battery’s SOC maintained within the optimal range (20% < SOC < 90%), the battery dynamically adjusts between charging and discharging modes based on grid conditions. During the initial grid-integrated phase i.e., 0 to 0.25 s, the hybrid microgrid is associated to the utility grid, enabling the battery to recharge and preserve its lifecycle. Following a transient at 0.25 s, the grid detached from the microgrid, shifting to islanded mode, where the storage unit discharges to fulfil load requirements. This shift in power dynamics is managed by the suggested supervised control strategy, which autonomously directs power flow based on real-time needs. Additionally, the proposed harmonic control-based VSI control ensures high PQ by mitigating nonlinearities within the circuit. This case study underscores the effectiveness of the proposed approach, demonstrating how it enhances the power transfer capability, power quality and stability during islanding condition.
The test results of the hybrid system under set operating conditions are depicted in Fig. 13a–d. In this setup, the setup hybrid system generates 44 kW of active power, which is fed to the DC-grid. As shown in Fig. 13a,b, VSI-1 and VSI-2 distribute this 44 kW as 40 kW active and 16kVar oscillating power to meet load demands. Due to the parallel connection of VSI and grid connected mode of operation, each VSI produces 20 kW active and 8kVar oscillating power for 0–0.25 s interval.

Active and Reactive Power: (a) VSI-1, (b) VSI-2, (c) Load-1, (d) Load-2 and (e) Grid; (f) DC voltage; Battery: (g) Current, (h) Power.
The power demands for two individual loads are represented in Fig. 13c,d, showing a total requirement of 60 kW active and 20kVar reactive power. During 0–0.25 s, addition to VSI, the main grid provides an additional 40 kW real power to meet load and battery requirements as depicted in Fig. 13e. The battery is charged by the grid to maintain its SOC, and the related charging current and power results are indicated in Fig. 13f,g. The developed system dc-link voltage as depicted in Fig. 13h stabilizes quickly at its rated value, which ensures reduced fluctuations without requiring additional voltage or frequency synchronization.
Specific to islanded phase at 0.25 onwards, the main grid disconnects, reducing grid-supply to zero. Due to the incapable of power generation and excess load demand, the battery compensates by supplying additional 20 kW DC power to the DC-grid, maintaining voltage as shown in Fig. 13g,h. The VSIs then increase output to 30 kW active and 10kVar oscillating power as depicted in Fig. 13a,b, with the proposed approach enabling smooth power transition and minimal settling time.
To test improved PQ, the performance of the proposed controller based microgrid is evaluated by analyzing the current results in Fig. 14a–d. The initial load current as depicted in Fig. 14a shows non-linearity, impacting system performance. The proposed controller effectively separates the non-linear and fundamental components, eliminating harmonics through the quadrature connection of VSIs and achieving IEEE-1541-compliant grid and inverter currents, as depicted in Fig. 14b–d. FFT analysis results, as depicted in Fig. 14e–h, indicate that initial load harmonics are significantly high at 20.6%. However, with the proposed approach, harmonic content in inverter and grid currents is substantially reduced, enhancing suitability for real microgrid operation. These findings confirm significant power quality and reliability improvements, supporting HWPS real-time application.

Current: (a) Load-1 and 2, (b) VSI-1, (c) VSI-2, (d) Grid; THD% of Current: (e) Load-1 and 2 (f) VSI-1 (g) VSI-2 (h) Grid.
Study-4 real-time validation through Typhon HIL-402 platform
In this study, the Typhoon HIL-402 platform was selected for real-time validation due to its ultra-low latency performance, high-fidelity hardware-in-the-loop simulation capabilities, and strong compatibility with FPGA-based control structures, which are critical for implementing the proposed DTWT-AAC control under dynamic microgrid conditions as illustrated in Fig. 15. The complete data regarding to the system modeling is presented in Appendix A. The HIL-402 platform comprises three essential mechanisms: the electronic circuit design editor (ECDE) for creating detailed circuit schematics, the circuit compiler (CC) for converting the design into optimized real-time executable C code, and the SCADA screen (SS) for live monitoring, parameter tuning, and system interaction. These features ensure precise emulation of power system behaviour, allowing real-time validation of grid synchronization, power quality improvement, and inverter coordination. The compilation process for real-time application was completed successfully, with hardware resource analysis showing efficient utilization: 50% CPU load, 75% converter module usage, and matrix memory utilization of 73.61%. Timing constraint analysis confirmed all deadlines were met, with core 0 operating at 68.75% of time slot utilization. The discretization of system dynamics ensured stable and accurate simulations. Furthermore, the HIL-402 enabled rapid evaluation of scenarios such as inverter failure, non-linear load impacts, and harmonic compensation performance, demonstrating the system’s robustness. These comprehensive validations confirm that the Typhoon HIL-402 is an ideal and resource-efficient platform for ensuring the proposed controller’s readiness for real-world microgrid applications. Full computational statistics are provided in the Appendix B.

Validation through Typhoon Hil-402.
Comparative real-time validation during bottom VSI failure
During VSI-2 failure, the real-time power performance is evaluated against the traditional control approach to highlight improved PR, as shown in Fig. 16a–j. In the HIL-402 real-time emulator, the SCADA window displays are used for a clearer comparative illustration for 10 s period. Across a 10 s monitoring period, VSI-2 fails to operate at 6 s mark, allowing for an assessment of synchronization between the top and bottom inverter. Like the above real-time case, in Fig. 16a, the PV generation is displayed. The proposed incremental conductance-integrated optimal power tracking (IC-OPTM) for PV generation demonstrates significantly improved performance like lesser distortion and faster settling time as compared to the traditional perturb and observe- integrated OPTM (P&O-OPTM) algorithm. The harmonic load demand set at 2 set at 200 kW and 5 kVar respectively as illustrated in Fig. 16b,c. The comparative battery power results as presented in Fig. 16d shows that the suggested supervised control provides faster charging and discharging operation as compared to traditional control approach depicted in Fig. 16d. In addition to that, the SOC of battery depicted in Fig. 16e show that during the charging it is increased for 0-6 s and afterwards, it is decreased. Figure 16f–i illustrates the comparative active and oscillating power of upper and lower inverter. From the results, it can be concluded that the proposed approach provides faster settling time as compared to traditional, with both supplying 50 kW from 0 to 3 s and 35 kW from 3-6 s. After 6 s onwards, the proposed control-based inverters play an important role to provide faster operation. From Fig. 16j, it can be concluded that the grid power reliability improved significantly by offering lesser distortion as compared to traditional. The comparative outcomes show significant results like synchronisation and improved PR during the proposed applications and suggested for practical implication.

Comparative results between AAC and traditional AC- (a) PV power; Load power: (b) Active, (c) Reactive; Battery (d) Power (e) SOC; Active Power (f) VSI-1 (g) VSI-2; Reactive Power (h) VSI-1 (i) VSI-2 (j) Grid power.
Comparative real-time validation during the absence of PV
This test case is formulated to evaluate the inverter performance during the failure of generation. Basically, in this condition, the presence of non-linearity and percentage of improvement is evaluated through real-time HIL-402 verifications. Figure 17a (i–iv) illustrates the real-time test results by giving importance on the current quality through significant observations. In Fig. 17a (i), the harmonic properties of the load current are indicated, whereas Fig. 17a (ii) shows that due to the absence of any control mechanisms, the grid current becomes nonlinear in nature. Figure 17a (iii) illustrates that the voltage and current waveforms are out of phase, and the current exhibits non-linear characteristics due to the absence of a control mechanism. This indicates that due to the absence of PLL based controller, the phase sequence of voltage and current is not matched, which decreases the system performance. Figure 16a (iv) depicts the inverter current results under this condition, which identifies that the inverter is not capable to generate the desired signal under the same conditions.

(i) Load current (ii) Grid current (iii) Voltage and Current (iv) VSI-1 and VSI-2 current: (a) Absence of controller (b) Conventional DWT based AC (c) Proposed DTWT based AAC.
While Fig. 17b (i–iv) illustrates the few non-linearities are alleviated using traditional PLL- DWT-AC and little improvement in the phase sequence of voltage and current. However, the improvement is not sufficient as per the international standards and not recommended for grid integration. Compared to Fig. 17a, b, c (i-iv) illustrates significant improvement in results by reducing the harmonic and phase sequence due to the application of proposed PLL- DTWT-AAC.
Additional proof to the validation of the proposed DTWT-AAC technique comes with the help of an analysis carried out through Fast Fourier Transform. With the help of FFT analysis of grid current, the THD percentage of grid current is 35.2% without control and 5.3% with traditional DWT-AC as illustrated in Fig. 18a and b. However, with the help of the proposed DTWT-AAC based control, the THD% is reduced to just 1.9% as illustrated in Fig. 18c. The improvement in THD% illustrates the proposed method superiority over the other approaches and recommended for practical applications.

THD percentage of Load and grid current (a) absent of controller, (f) DWT-adaptive controller, (g) DTWT-advanced adaptive controller.
Inference from comparative and statistical performance analysis
The comparative analysis presented in Tables 2, 3, and 4 provides valuable insights into the efficacy of the proposed DTWT-AAC strategy. Both simulation-based validation and real-time experimentation have been carried out under diverse operational scenarios to evaluate current harmonic distortion, PQ improvement, overall system enhancement, and dynamic response.
-
(1)
Performance under different grid operating conditions
In the software validation stage as presented in Table 2, three operating modes were considered: Grid Following (GF) at Inverter-1 failure, GF at variable generation, and combined Grid Following and Grid Forming (GF & GFm) operation.
-
Under GF at Inverter-1 failure, the THD in grid current was reduced to 0.136%, with corresponding PQ and overall improvement reaching 99.52% and 99.54%, respectively.
-
In the GF mode under variable generation, the lowest grid THD of 0.05% was achieved, alongside the highest PQ improvement of 99.83%.
-
In the combined GF & GFm mode, the grid THD remained effectively suppressed at 0.113%, with PQ and overall improvements recorded at 99.6% and 99.59%, respectively.
These results confirm the proposed method’s ability to adaptively manage harmonics and maintain power quality under various operational disturbances and configurations.
-
(2)
Real-Time Control Validation
Real-time validation was conducted under three conditions: without controller, with traditional DWT-AC, and with the proposed DTWT-AAC method.
-
Without any control strategy, the grid current THD was observed at 35.2%, indicating extremely poor harmonic performance and load satisfaction.
-
With the traditional DWT-AC method, grid THD was reduced to 5.3%, and PQ improvement stood at 84.94%. However, the system exhibited a prolonged settling time of 0.7 s, making it less suitable for fast dynamic responses.
-
In contrast, the proposed DTWT-AAC control strategy brought down the grid THD to 1.9%, with a corresponding PQ and overall improvement of 94.6%. The average settling time was significantly reduced to 0.3 s, indicating a substantial improvement in transient response and control agility.
These observations clearly establish the superiority of the DTWT-AAC approach in both harmonic mitigation and system responsiveness under real-world conditions.
-
(3)
Summary of comparative performance
Table 3 summarizes the overall performance metrics across all test cases. In simulation environments, the grid THD remained consistently below 0.15% for all modes, with PQ improvement above 99.5%. Real-time tests showed the proposed DTWT-AAC to provide high load satisfaction with significantly better harmonic performance and faster settling compared to the traditional control method.
-
(4)
Statistical analysis of simulation vs. real-time results
The statistical data presented in Table 4 indicate a THD deviation of only 4.9% between simulation and real-time implementation for the DTWT-AAC method, with a standard deviation of 6.05%. The settling time deviation was limited to 0.29 s, with a standard deviation of 0.1465 s, highlighting the method’s consistency and practical viability. Comparatively, the traditional DWT-AC approach exhibited higher settling time deviation (0.68 s) and variability (standard deviation of 0.3246 s), confirming the dynamic superiority of the proposed approach.
-
(5)
Scalability analysis
When scaling the system from two to five inverters, several factors come into play:
-
Control Complexity The controller architecture should accommodate inter-inverter coordination and adaptive scheduling to ensure seamless synchronization and prevent control saturation. DTWT-AAC’s modular signal processing is well-suited for multi-inverter systems due to its lightweight and phase-adaptive nature, which is confirmed from the result analysis section during the failure of one inverter.
-
Synchronization With more inverters, synchronization accuracy becomes critical. DTWT’s reduced settling time (0.3 s) and lower standard deviation (0.1465 s) support tighter coordination.
-
THD Management As inverter count increases, cumulative harmonics can rise due to interactions. However, DTWT-AAC’s superior harmonic filtering (THD ~ 1.9%) suggests it can manage added distortion effectively.
-
Load Sharing and Stability Multi-inverter systems must maintain equitable load distribution. The current control scheme shows excellent dynamic current tracking and low THD, implying it can maintain load satisfaction even in scaled configurations.
-
Communication & Computation Overhead Real-time implementation in a five-inverter setup will demand distributed control or high-speed centralized processing. The lower computation footprint of DTWT processing gives it a practical edge.
Conclusion
The proposed study introduces a novel AAC strategy with a built-in synchronization mechanism for HMG systems, showcasing significant improvements in PQ, dynamic stability, and operational reliability. By intelligently switching between grid-following and grid-forming modes, the AAC ensures seamless transitions under various dynamic conditions. The DTWT-based current control in the grid-following mode achieves superior PQ by effectively isolating the fundamental active component, while the synchronization control in the grid-forming mode ensures smooth and stable voltage control transitions.
A comparative analysis between the proposed DTWT-AAC and conventional DWT-AC strategies highlights the quantifiable advancements achieved. Specifically, the DTWT-AAC reduces THD to 1.9% in real-time testing, compared to 5.3% with DWT-AC and 35.2% without any control. Furthermore, synchronization response times are significantly improved—reduced from 0.9 s (DWT-AC) to 0.2 s (DTWT-AAC) in real-time tests, and as low as 0.02–0.03 s during software-based validations across various critical events such as inverter failures, generation variations, and mode transitions. PQ improvements of 99.54%, 99.82%, and 99.59% were observed in these respective scenarios.
Despite the promising outcomes, the study identifies important areas for future enhancement. Future research will aim to extend the AAC strategy to high-voltage microgrid environments (> 11 kV), ensuring its scalability and applicability to larger, more complex systems. To strengthen system resilience, further investigations will be conducted under extreme operational conditions, including severe faults and cascading failures, which have not been addressed in the current work. Additionally, real-time validation against cybersecurity threats will be pursued to enhance the system’s robustness in adversarial environments. The integration of AI-based predictive models for improved forecasting, adaptive control, and dynamic decision-making will also be explored to further elevate the operational intelligence and resilience of the proposed framework. These efforts will ensure that the AAC strategy is well-prepared for practical deployment in future smart-grid applications.
The proposed DTWT-AAC framework offers substantial and quantifiable improvements over conventional methods, presenting a strong foundation for the next generation of grid-integrated renewable HMG systems.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Kanchana, K. et al. Advancing microgrid power quality: Integration of GRU-based control in PV-UPQC systems. Electr. Eng. 107, 1–26 (2024).
Sindi, H. F. et al. Robust control of adaptive power quality compensator in multi-microgrids for power quality enhancement using puzzle optimization algorithm. Ain Shams Eng. J. 14(8), 102047 (2023).
Pattnaik, M., Badoni, M. & Tatte, Y. PKLMP based control technique for improving performance of multifunctional grid integrated PV system. Electr. Power Syst. Res. 217, 109096 (2023).
Rahman, S., Li, S. & Das, H. S. A comprehensive PQ capability study for grid interconnection of inverter based resources plant. In 2023 IEEE Industry Applications Society Annual Meeting (IAS). (IEEE, 2023).
Channa, I. A. et al. An improved machine learning-based model for detecting and classifying PQDs with high noise immunity in renewable-integrated microgrids. Int. Trans. Electr. Energy Syst. 2024(1), 9118811 (2024).
He, Z. et al. Optimized ensemble EMD-based spectral features for hyperspectral image classification. IEEE Trans. Instrum. Meas. 63(5), 1041–1056 (2014).
Kandasamy, P. et al. Initial condition based real time classification of power quality disturbance using deep convolution neural network with bidirectional long short-term memory. IET Gener. Transm. Distrib. 17(23), 5135–5154 (2023).
Lee, S. H., Choi, D. & Baek, S. M. Online nonlinear PQ droop estimation of distributed generations based on Kalman-filter algorithm to improve voltage stability. IEEE Access 12, 29457 (2024).
Vinayagam, A. et al. Heterogeneous learning method of ensemble classifiers for identification and classification of power quality events and fault transients in wind power integrated microgrid. Sustain. Energy Grids Netw. 31, 100752 (2022).
Jose, KM., and Walid GM. (2022) Smart Grid Data Compression of Power Quality Events Using Wavelet Transform. In 2022 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE). (IEEE, 2022).
Sahoo, B., Routray, S. K. & Rout, P. K. Complex dual-tree wavelet transform and unified power management-based control architecture for hybrid wind power system. Sustain. Energy Technol. Assess. 47, 101560 (2021).
Chaudhury, K. N. & Unser, M. On the shiftability of dual-tree complex wavelet transforms. IEEE Trans. Signal Process. 58(1), 221–232 (2009).
Kong, M. et al. HVAC energy savings, thermal comfort and air quality for occupant-centric control through a side-by-side experimental study. Appl. Energy 306, 117987 (2022).
Lai, H. et al. Droop control strategy for microgrid inverters: A deep reinforcement learning enhanced approach. Energy Rep. 9, 567–575 (2023).
Moradi, M., Heydari, M. & Zarei, S. F. An overview on consensus-based distributed secondary control schemes in DC microgrids. Electr. Power Syst. Res. 225, 109870 (2023).
Hasani, A., Heydari, H. & Golsorkhi, M. S. Enhancing microgrid performance with AI-based predictive control: Establishing an intelligent distributed control system. IET Gener. Transm. Distrib. 18(15), 2499–2508 (2024).
Abou El-Ela, A. A., Hanan, A. M. & Ragab, A. A. Optimal control design and management of complete DC-renewable energy microgrid system. Ain Shams Eng. J. 14(5), 101964 (2023).
Chen, S. et al. Denoising of partial discharges in switchgear insulation material using hybrid wavelet denoising-optimization-machine learning. Ain Shams Eng. J. 15, 103032 (2024).
Acknowledgements
This project was supported by the Deanship of Scientific Research at Prince SattamBin Abdulaziz University under the research project (PSAU2022/01/19413) and SR University, Hanumakonda, Warangal 506371, Telangana, India.
Author information
Authors and Affiliations
Contributions
B.S.: conceptualization, visualization, investigation, methodology, writing software, original draft preparation, and validation. M.M.A.: Data curation, supervision, resources, writing, review & editing, and project administration.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Sahoo, B., Alhaider, M.M. Dual-tree wavelet transform based advanced adaptive control for seamless transition in PV-battery hybrid microgrid system. Sci Rep 15, 20464 (2025). https://doi.org/10.1038/s41598-025-05398-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-05398-y
