
Abstract
Implementing a suitable load frequency controller to maintain the power balance equation for a multi-area system with many power generating units poses a challenge to a power system engineer. Incorporation of renewable energy sources along with non-renewable units is another challenge while maintaining the stability of the system. Hence a robust intelligent controller is an essential requirement to achieve the objective of automatic load frequency control. This article introduces a novel and efficient controller designed for a three-control area within a deregulated multi-source energy system. The three areas include diverse power generation sources: Area 1 integrates thermal units, hydro units, and solar thermal power plants. In Area 2, there is a combination of distributed solar technology (DST) with thermal and hydro units. Area 3 incorporates a geothermal power plant alongside thermal and hydro unit. The proposed controller is a parallel combination of the tilted integral derivative controller (TID) and the integral derivative with a first-order filter effect (IDN). The controller’s parameters are optimized using an advanced Coatis Optimization Algorithm (COA). High effective efficiency and absence of control parameters are the key advantages of Coatis Optimization Algorithm. The article highlights the superior performance of the newly developed TID + IDN controller in comparison to standalone TID and IDN controllers. This assessment is based on the observation of dynamic responses across different controller configurations. Additionally, the study examines the system’s behaviour when incorporating energy storage units such as Redox Flow Batteries (RFB). Furthermore, the research investigates the system under various power transactions in a deregulated environment, considering generation rate constraints and governor dead bands. The proposed approach’s robustness is demonstrated by subjecting it to extensive variations in system parameters and random load fluctuations. In summary, this paper presents an innovative TID + IDN controller optimized using a novel Coatis Optimization Algorithm within a three-area hybrid system operating in a deregulated context. Considering the poolco transaction and implementing the COA optimized TID + IDN controller with an error margin of 0.02%, the value of the objective function, ITAE for the transient responses is 0.1233. This value is less than the value obtained in other controllers optimized with different optimization techniques. In case of poolco transaction, the settling time of deviation of frequency in area-1, deviation of frequency in area-2, and deviation of frequency in area-3 are 8.129, 3.72, and 2.254 respectively. As compared to other controllers, the transient parameters are better in case of this proposed controller.
Similar content being viewed by others

Introduction
Automatic Generation Control (AGC) plays a pivotal role in ensuring the smooth functioning of a deregulated energy system, ultimately upholding system reliability1,2. The deregulated system was introduced to prevent the monopolization of utility companies and promotes a more competitive environment. In this deregulated setup, various entities are involved, including Generating Companies (GENCOs), Transmission Companies (TRANSCOs), Distribution Companies (DISCOs), and the Independent System Operator, collectively managing the entire system. Within this framework, GENCOs have the option to take part, while DISCOs possess the autonomy to opt the contract with GENCOs from different areas to meet their load demands. The overarching administration of the system is under the supervision of the Independent System Operator. Several authors have provided insights into the mechanisms of energy trading, which encompasses bilateral transactions, pool-based systems, and contractual compliance. Bhatt and colleagues have expounded on the control of output power variations in individual areas through the utilization of the Area Participation Factor (APF). Additionally, researchers like Parida have described the formation of the DPM depend on Contract Participation Factors (CPFs), highlighting its impact in conjunction with area participation factor(APFs). Furthermore, Donde and others have undertaken an analysis of AGC issues within a deregulated system that primarily relies on thermal units for power generation3. This diverse body of research contributes significantly to our understanding of AGC within the context of a deregulated energy system1,4,5,6,7.
Renewable Energy Sources (RES) are more sustainable, produce less carbon emissions, and minimize air pollution compared to energy sources based on fossil fuel. Solar and wind energy are more cost-effective. Implementation of RES into the grid provides a more stable and secure source of energy. Using RES, power can be provided to rural and remote areas where installation of a centralized grid may not be possible or economical. By incorporating RES into the grid, the stability of grid can be improved. In this article, a robust efficient controller is incorporated in a three area deregulated energy system consisting of RES and non-renewable energy sources.
The organization of the rest of the article can be summarized as follows: The state-of-art review of the proposed work has been explained in Sect. "State of the art". The proposed controller configuration, and the design procedures for the controller are outlined in Sect. "Literature survey". The Sect. "Research gap and motivation" outlines the hybrid model, incorporating both conventional and renewable sources. The Coatis optimization algorithm (COA) has been discussed in Sect. "Proposed TID + IDN controller for LFC". Section "Deregulated hybrid three area test system" provides an analysis of the performance of the COA with simulation results and discussions. Section "Objective function for automatic generation control (AGC)" concludes the paper. Different system parameters used in this paper have been included in supplementary material file in the form of appendix.
State of the art
This section represents the recent literature analysis regarding load frequency control considering various energy sources with separate power systems along with distinct controllers for maintaining stability of automatic generation control. Second part of this section represents the research gap and motivation.
Literature survey
Various authors have reported performance assessments on multi area hybrid power systems within a deregulated scenario. Demiroren et al.8 investigated a deregulated three-area system, analyzing its performance by implementing a continuous parameter Genetic Algorithm (GA) based on real values. However, it is noteworthy that their analysis did not consider any non-linearities in the system. In a separate study, Bhatt et al. explored the response of a deregulated four-area system using hybrid particle swarm optimization9. Notably, they did not incorporate non-linearities into their analysis either. The DISCO participation matrix concept was implemented in both three-area and four-area systems within a bilateral scenario. Nasiruddin10 et al. focused on analyzing AGC in a system with two control area in which the bacteria foraging optimization technique is implemented. Similar to previous studies, they did not incorporate system nonlinearities. To enhance the realism of their analysis, other authors introduced non-linearities such as the generation rate constraint (GRC) and governor dead band (GDB). In a comprehensive examination, Mohanty11 et al. studied the dynamic of a multi-area system under deregulation, specifically considering the impact of the GRC effect. Their analysis included thermal, nuclear, and hydropower units in each area, incorporating GRC and AC/DC links. The study further conducted sensitivity analysis using different controllers, such as integral-double derivative (IDD) and proportional-integral-double derivative (PIDD). Sekhar et al.12 analyzed a multi-area system, considering GDB and GRC. This research highlights the fruitfulness of the novel Firefly Algorithm-tuned hybrid fuzzy PID controller with a derivative filter in a multi-area, multi-source system in a deregulated environment. In this paper the nonlinearities are taken into account while examining the controller’s response under varying loads, different parameters, and random load disturbances. In a separate study, Rosaline et al.13 scrutinized a restructured two-area system that involved GRC and GDB nonlinearities along with boiler dynamics. Their paper introduces a structured H-infinity controller and a redox flow battery implemented in a deregulated power system. The purpose is to showcase the robustness of the controller considering the effects of time delay, generation rate constraint and governor dead band.
Expanding on optimization techniques, Aribowo et al.14 introduced a modified mountain gazelle optimizer for tuning PID parameters in DC motor control, achieving enhanced system responsiveness and stability. In a subsequent study, Aribowo et al.15 employed a gradient-based optimizer for PID parameter tuning in DC motors, emphasizing the importance of precise parameter adjustment in control systems. These studies underscore the critical role of optimization algorithms in refining controller performance across various applications. Addressing the challenges of hybrid power systems, Premkumar et al.16 investigated the optimal operation and control of systems incorporating stochastic renewable energy sources and Flexible AC Transmission Systems (FACTS) devices. They employed an intelligent multi-objective optimization approach to balance operational efficiency and system reliability. Complementing this, Pandya et al.17 proposed a multi-objective RIME algorithm for techno-economic analysis in security-constrained load dispatch and power flow, accounting for uncertainties in hybrid power systems. Their work provides a comprehensive framework for managing the complexities associated with renewable integration and system security. In the realm of control system simplification, Alsmadi et al.18 presented a model order reduction technique that preserves substructure and incorporates fuzzy logic control. This method effectively reduces system complexity while maintaining essential dynamic characteristics, facilitating more efficient control strategies. Focusing on aerospace applications, Abualigah et al.19 designed a filtered PID controller for aircraft pitch control using the sinh-cosh optimizer, achieving improved stability and response times. Their approach demonstrates the applicability of advanced optimization techniques in critical control scenarios. In power quality enhancement, Alrashed et al.20 improved the control strategy of Dynamic Voltage Restorer (DVR) compensators by integrating an adaptive notch filter with an optimized proportional-derivative (PD) controller, utilizing the Improved Grey Wolf Optimizer (IGWO) algorithm. This integration effectively mitigates voltage disturbances, ensuring consistent power delivery. Addressing frequency regulation in multi-microgrid systems, Fadheel et al.21 proposed a hybrid sparrow search optimized fractional virtual inertia control, enhancing system resilience to frequency deviations. Their work highlights the importance of adaptive control mechanisms in maintaining grid stability amidst fluctuating renewable inputs. In the context of aircraft control systems, Abualigah et al.22 introduced an artificial rabbits optimizer integrated with a PID-F controller for optimizing aircraft pitch control, resulting in superior handling of dynamic changes and disturbances. Furthering advancements in voltage regulation, Izci et al.23 utilized a refined sinh-cosh optimizer to design controllers that enhance the stability of automatic voltage regulators, demonstrating improved transient response and robustness. In a subsequent study, Izci et al.24 developed a novel control scheme for automatic voltage regulators using a modified artificial rabbits optimizer, achieving notable improvements in voltage stability and control precision. Focusing on renewable energy integration, Altawil et al.25 optimized fractional-order PI controllers for regulating grid voltage in PV systems using the slap swarm algorithm, effectively managing the variability inherent in solar power generation. In automotive control, Abualigah et al.26 employed a modified elite opposition-based artificial hummingbird algorithm to design fractional-order PID controllers for cruise control systems, achieving enhanced speed regulation and adaptability. Lastly, Sarayrah et al.27 studied a damping control strategy based on predictive approaches for inter-area power systems, contributing to improved system stability and reduced oscillations in large-scale power networks. Collectively, these studies underscore the critical role of advanced control strategies and optimization algorithms in addressing the complexities of modern power systems, particularly in the integration of renewable energy sources and the enhancement of system stability and performance.
Kalyan et al.28 proposed a coordinated strategy integrating a supercapacitor and Static Synchronous Series Compensator (SSSC) to enhance the performance of interconnected power systems with diverse energy sources, demonstrating improved power oscillation damping and stability under load variations. Building on the theme of system stability, Kalyan et al.29 investigated frequency regulation in geothermal power plant-integrated systems using a 3DOFPID controller, highlighting its adaptability to renewable energy variability. Gopi et al.30 introduced the V-Tiger PID controller for automatic voltage regulators, achieving superior transient response and robustness compared to traditional PID controllers, emphasizing its applicability for voltage control. Further advancing optimization techniques, Kalyan et al.31 utilized the Squirrel Search Algorithm (SSA) to design an intelligent controller for interconnected systems, which effectively managed dynamic complexities and improved system robustness. In a similar vein, Goud et al.32 applied a Gravitational Search Algorithm (GSA)-tuned Fractional Order PID controller within a Current-Controlled Voltage Source Inverter (CC-VSI) to address power quality issues in photovoltaic (PV)-integrated systems, ensuring stable operation. Begum et al.33 developed an intelligent fuzzy logic-based sliding mode controller for frequency stability in deregulated systems, validated through real-time simulation using the OPAL-RT platform. Mohapatra et al.34 optimized grid-connected PV systems with a super-twisting sliding mode controller, addressing uncertainties and enhancing real-time power management. Kalyan et al.35 assessed the effectiveness of open-loop and closed-loop Generation Rate Constraint (GRC) models in maintaining frequency stability in three-area thermal systems. Further, Kalyan et al.36 introduced a Seagull Optimization Algorithm-based Fractional Order Fuzzy Controller for multi-source systems with realistic constraints, achieving significant improvements in frequency control. Their subsequent work37 applied a Water-Cycle Algorithm to tune an intelligent fuzzy controller for multi-fuel systems, effectively managing time delays and ensuring stability. In38, Kalyan et al. conducted a comparative analysis of energy storage devices in combined Load Frequency Control (LFC) and Automatic Voltage Regulation (AVR), offering insights into their contributions to system stability. Finally, Kalyan et al.39 proposed a Type-II fuzzy controller optimized with the Water Cycle Algorithm for LFC in multi-area, multi-fuel systems with communication delays, demonstrating robustness and reliability in diverse operating conditions. These studies collectively highlight advancements in controller designs and optimization techniques to address challenges like renewable energy integration, system stability, and real-time control in hybrid power systems, offering complementary insights to existing solutions.
Arya et al.4 conducted an investigation on a multi-area system interconnected through AC/DC parallel links in a restructured environment. The analysis focused on a two-area non-reheat thermal system, considering GDB. Optimal control theory was employed to design a Proportional-Integral (PI) controller, and the system’s output was differentiated with a single-source thermal unit in a deregulated scenario. In a related study5, a two-area system with AC/DC parallel links under a restructured environment was analysed. Optimum Control Methods were implemented, and optimal control theory was implemented to configure a PI-tuned Automatic Generation Control. The response of this system was correlate with a system consisting a thermal unit in a deregulated structure. Furthermore, the analysis was done to investigate the impact of GDB in a system consisting of two control area with non-reheat thermal system.
Demiroren et al. analysed a restructured 3-area system without considering any non-linearities. Mohanty et al. examined a deregulated multi-area system, incorporating generation rate constraints. Sekhar et al. explained a restructured multi-source system, considering non-linearities such as generation rate constraints (GRC) and governor dead band (GDB). More recently, Rosaline et al. analyzed a deregulated 2-area system, incorporating GDB and GRC non-linearities along with boiler dynamics. Papers40,39,40,43 have investigated load frequency control, primarily focusing on conventional energy sources like coal. However, these studies have not analyzed systems comprising Renewable Energy Sources (RESs) based power plants. The decline rate of conventional energy sources and emissions of carbon components have turned the researchers towards renewable energy sources such as wind power plants, Solar Thermal Power Plants (STPP), Distributed Solar Thermal Systems (DSTS), and Gas Turbine Power Plants (GTPP). In44, the authors analyzed a system incorporating wind plants, solar photovoltaic, along with thermal, hydro, diesel plants, and gas turbines. Papers45,46 investigated a three-area system, including thermal, wind, GTPP, STPP, and hydro plants. In45, a combined differential evolution artificial electric field algorithm-based PID controller was presented to examine the robustness and sensitivity analysis of a hybrid system incorporating both RES and non-renewable energy sources. This paper also addresses the effects of communication time delays and GRC on the load frequency control of the hybrid system. In46, the authors made a pioneering attempt to implement an artificial flora algorithm (AFA) optimized cascade CPDN-PIDN controller in the united Automatic Load Frequency Control & Automatic Voltage Regulator (AVR) system. It is observed that the dynamic responses of CPDN-PIDN are significantly better than those of PI and PIDN controllers. From the investigation it is observed that as compared to the wind plant the geothermal power plant is more reliable. It is justified by using a real-time simulation with the OPAL-RT OP4510 real-time setup.
In a study the authors in47, analyzed the response of a three-control area system incorporating diesel unit, thermal unit and Solar Thermal Power Plants (STPP). DSTS units were introduced in a three-area system comprising hydrothermal units48. R. Rajbanshi49 et al. incorporated a dish-Stirling solar thermal system into a multi-area system, considering GRC and GDB with thermal and hydro units44,43,44,45,46,49. The analysis reveals that the implementation of renewable energies in the power system tends to decrease system stability. To address this issue and improve power transfer capability between interconnected control areas, FACT (Flexible AC Transmission System) controllers are introduced50. Different authors in50,49,50,53 have incorporated various FACT devices, such as the Thyristor Control Series Capacitor (TCSC), Unified Power Flow Controller (UPFC), Thyristor Control Series Capacitor (TCSC), Thyristor Control Phase Shifter (TCPS), Static Synchronous Series Compensator (SSSC) and Inter-line Power Flow Controller (IPFC), aiming to enhance system stability. Dhundhara et al.52 proposed a 2-area interconnected system incorporated with a Capacitor Energy Storage (CES) device in a deregulated scenario. Their paper validates the effect of the united action of thyristor-controlled phase shifter units and capacitive energy storage by implementing a sine-cosine algorithm-optimized controller under different operating conditions. Shankar et al.53 examined Automatic Generation Control (AGC) issues under a deregulated environment, incorporating Unified Power Flow Controller (UPFC) and AC/DC links. Designing a dynamic controller is essential to solve AGC problems in electrical energy systems. The oscillation states of the test system were evaluated through small signal stability analysis of each area, incorporating a robust controller optimized by the Fruit Fly Algorithm.
Addressing both scheduled and unscheduled power transactions between different control areas causes a shift in stable operating points within the deregulated system. A robust controller becomes essential to navigate these challenges, as a simple Proportional-Integral-Derivative (PID) controller often falls short. Researchers have developed non-integer PID controllers to enhance controller responses. In a restructured system, a significant concern is the design and application of robust control strategies for Automatic Generation Control (AGC) issues. Various authors have employed different controllers for this purpose. Sahu et al.54 implemented a Teaching-Learning-Based Optimization (TLBO) tuned Fuzzy-PID controller. Robustness analysis was conducted under wide changes in system parameters, comparing it with other optimization algorithms. Rahman et al.55 explored AGC in a deregulated scenario incorporating a Three Degrees of Freedom (3-DOF) based Integral-Derivative (ID) controller. The performance was compared with single-degree-of-freedom controllers such as integral (I), integral-derivative (ID), and two-degree-of-freedom integral-derivative (2DOF-ID) controllers. Bio-geography-Based Optimization (BBO) technique was applied for optimizing governor parameters and controller gains, demonstrating superior performance of the 3DOF-ID controller. Nayak et al.56 proposed a Fuzzy-based PID controller to enhance AGC performance. A Two Degree of Freedom Optimal Fuzzy-Aided PID controller was applied in both two and three-area systems as a secondary controller. The proposed controller’s performance was validated through a comparative study with other controllers, introducing a new optimization algorithm. Saha et al.57 addressed controller performance by integrating non-integer and integer based PID controllers in the AGC of system having two control area in a deregulated scenario. A novel controller cascaded PIDN-FOID was introduced and outperformed other controllers. Tasnin et al.58 presented the performance of a FOPI–FOPD cascaded controller compared to a conventional PID in a deregulated three-area system. The study involved a comparison of various energy storage devices and introduced a new fractional-order cascade controller. S lalngaihawma et al. presented an interconnected system in deregulated environment incorporating electric vehicle59. S. Rangi analysed a multi area system with an optimal controller in deregulated scenario incorporating energy storage devices60.
Literature analysis reveals a trend among researchers to implement different fractional-order controllers due to their flexible configuration and higher degree of freedom. Fractional-order PID61,60,61,62,63,66 and fractional-order fuzzy PID controllers67 have been incorporated to achieve better dynamic responses. Additionally, various cascade controllers, such as CPDN-PIDN, FOI-FOPDF, PDN-PIDN, FOPDN-FOPIDN, and fuzzy FOPI-FOPID, have been designed and incorporated in Load Frequency Control (LFC) studies. Several meta-heuristic optimizations have been employed to minimize Automatic Generation Control (AGC) issues. Different methodologies, including Particle Swarm Optimization (PSO)8, Teaching-Learning Based Optimization Algorithm, Firefly Optimization Algorithm (FOA)47, OFF Algorithm50, Fruit Fly Optimization51, Quasi-Oppositional Harmony Search Algorithm52, and Improved Squirrel Search Algorithm68, have been incorporated to analyze Load Frequency Control (LFC) performance. The analysis suggests that the integration of a robust controller using a novel meta-heuristic optimization methodology is crucial to enhance time response characteristics.
Research gap and motivation
Despite extensive research in Load Frequency Control, several key gaps remain unaddressed, particularly with the increasing complexity of modern power systems. Many traditional controllers such as PI and PID controllers often struggle with nonlinearity, time-varying parameters, and the inherent uncertainty of renewable energy sources. The adaptive and intelligent controllers like Fuzzy Logic, Neural Networks, and Fractional Order PID (FOPID) controllers often face challenges in balancing adaptability, robustness and computational efficiency. The incorporation of renewable energy in deregulated environments introduces uncertainties and disturbances which are not fully captured by already existing control techniques.
It has been observed that till date no attempt has been made to implement a COA tuned controller for LFC study in deregulated scenario. Hence a novel controller TID + IDN tuned with COA optimization has been proposed.
This study focuses on a multi-source system that includes hydro unit, thermal unit, dish-Stirling solar thermal system, geothermal power plant and solar thermal power plant. Geothermal energy is considered more reliable than wind because the output power of geothermal power plant can be easily predicted with very good accuracy. In case of wind power plant, power production is unpredictable as weather plays an important role in power generation. The actual power output in Geothermal power plant is close to total installed capacity. The analysis takes into consideration both Governor Dead Band (GDB) and Generation Rate Constraint (GRC) non-linearities. GRC and GDB are the most common non-linearities present in load frequency control. The rate of fluctuation of output power of thermal power plant is restrained by thermodynamics and mechanical limitations on steam turbines. To maintain the safety of equipment, large deviations can be avoided by imposing rate limits by variables such as temperature and pressure. GDB deals with the governor sustaining to speed changes for which the valve’s position remains unchanged. For this analysis, a backlash of 0.05% is chosen.
The system is examined with a Redox Flow Battery (RFB). An innovative algorithm known as the Coati Optimization Algorithm (COA), developed by Mohammad et al. in69, is introduced. However, it has yet to be implemented to address the LFC problem in a deregulated scenario. In this methodology, a newly developed Coati Optimization Algorithm has been implemented to fine tune the parameters of a novel TID + IDN controller. This COA optimization has a faster converging characteristic as compared to other algorithms like ISSA, SSA and PSO. The performance indices of the response obtained using this proposed technique is better as compared to ISSA optimized TID + IDN controller, SSA optimized TID + IDN controller, PSO optimized TID + IDN controller and COA tuned TID and IDN controller.
The main contributions of this work are outlined as follows:
-
(i)
To endorse a newly developed COA optimized TID + IDN controller to solve LFC problem of interconnected three-area multi-source system in deregulated scenario.
-
(ii)
To determine the advantages of the proposed controller in comparison to ISSA/SSA/PSO optimized TID + IDN, COA tuned IDN/ TID controllers.
-
(iii)
To solve the problems related to LFC by applying Coati Optimization Algorithm (COA) tuned TID + IDN controller in a three-area interconnected power system consisting of renewable and non-renewable units.
-
(iv)
A three-area system with different generating units is mathematically modelled using MATLAB/ Simulink environment.
-
(v)
To enhance the dynamic performance of the suggested system, TID + IDN controller is implemented.
-
(vi)
The response of the TID + IDN controller is compared with the output response of the controllers such as TID and IDN controller to prove its supremacy over other controllers.
-
(vii)
To illustrate the validity of the suggested work, different variations in load have been considered in the system.
-
(viii)
This research has been further continued to validate the dominance of the applied optimization technique by comparing the response with the responses of optimization algorithms such as PSO, SSA and ISSA.
Proposed TID + IDN controller for LFC
A proposed novel TID + IDN controller is the parallel combination of Tilt Integral Derivative (TID) controller and Integral Derivative Filter (IDN) controller. The advantages of a parallel combination of these two controllers include flexibility and adaptability for tuning the controller to different operating conditions along with the improved system reliability and redundancy, hence reducing the risk of failure. Proposed controller reduced sensitivity to parameter variations or changes in the controlled process. Figure 1 shows the block diagram of TID controller, IDN controller and proposed TID + IDN controller. Output of the proposed controller has been given in Eq. 3 which is the combination of TID (Eq. 1) and IDN (Eq. 2) controllers.

(a). Block diagram of TID controller (b). IDN controller. (c). TID + IDN controller.
Output of the proposed TID + IDN controller can be given by Eq. (3)
Where, Ki1, Ki2, & Kd1 represent the gain for TID controller whereas Ki& Kd2 represent the gain of IDN controller and N is the filter constant.
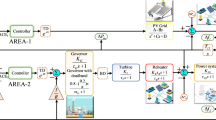
Deregulated hybrid three area test system
Figure 2 depicts the transfer function model of a three-area system designed for automatic generation control in a restructured scenario. This three-area multi-source system serves as the basis for analyzing Automatic Generation Control (AGC) in a deregulated environment70. The diagram illustrates the overall multi-area system featuring various generation units. To enhance system performance, Thyristor-Controlled Series Compensator (TCSC) and Redox Flow Battery (RFB) are integrated. This paper specifically considers GRC and GDB in a deregulated scenario71. Area 1 is comprised of three generation units, including a hydro power unit, Solar Thermal Power Plant (STTP), and a reheat thermal unit, all while considering generation rate constraints. Area 2 consists of three Generation Companies (GENCOs), a Dish-Stirling Solar Thermal System (DST), a hydro power unit, and a reheat thermal unit with GRC. Area 3 includes a thermal reheat unit with GRC, a Geothermal Power Plant (GTPP), and a hydro power unit. Each control area is provided with three different Distribution Companies (DISCOs). The mathematical model of this system is presented in Fig. 2. ∆f1, ∆f2 and ∆f3 are the system frequency deviations in Hz. For the thermal unit the GDB of 0.06% (0.036 Hz) and GRC of 3% p.u MW/min is considered72. For the hydro-plant GDB of 0.02%(0.012 Hz) is taken. The GRC of 270% p.uMW/min raising and 360% p.u MW/min lowering power generation are considered for the hydro unit. The solar insolation of the STPP and DSTS units are taken as 0.008puMW/m2. The pertinent parameters are provided in Appendix A (supplementary material file). The interconnected system under a deregulated scenario involves a total of nine Generation Companies (GENCOs) and nine Distribution Companies (DISCOs). When there is a power contract between DISCOs and GENCOs within the same control area, it is termed as a “poolco-based transaction.” On the other hand, if the transaction occurs between GENCOs and DISCOs from two different areas, it is referred to as a “bilateral transaction.” The term “contract violation” is used when the load demand exceeds the contracted value.
Objective function for automatic generation control (AGC)
The system consists of nine Generation Companies (GENCOs) and nine Distribution Companies (DISCOs). When there is a power contract between DISCOs and GENCOs within the same control area, it is termed as a “poolco-based transaction.” On the other hand, if the transaction occurs between GENCOs and DISCOs from two different areas, it is referred to as a “bilateral transaction.” The term “contract violation” is used when the load demand exceeds the contracted value. DISCO Participation Matrix (DPM) is used to specify the power contract between DISCOs and GENCOs. The total rows in DPM is same as the total number of generation companies and the total columns represent the number of distributed companies in the system. The summation of all the values in any column of a DPM is always one.
GENCO1, GENCO2, GENCO3, DISCO1, DISCO2 and DISCO3 are in area (1) GENCO4, GENCO5, GENCO6, DISCO4, DISCO5 and DISCO6 are in area (2) GENCO7, GENCO8, GENCO9, DISCO7, DISCO8 and DISCO9 are in area (3) Then the corresponding DPM is written as9.
\(DPM=\left[ {\begin{array}{*{20}{c}} {cp{f_{11}}}&{cp{f_{12}}}&{cp{f_{13}}}&{cp{f_{14}}}&{cp{f_{15}}}&{cp{f_{16}}}&{cp{f_{17}}}&{cp{f_{18}}}&{cp{f_{19}}} \\ {cp{f_{21}}}&{cp{f_{22}}}&{cp{f_{23}}}&{cp{f_{24}}}&{cp{f_{25}}}&{cp{f_{26}}}&{cp{f_{27}}}&{cp{f_{28}}}&{cp{f_{29}}} \\ {cp{f_{31}}}&{cp{f_{32}}}&{cp{f_{33}}}&{cp{f_{34}}}&{cp{f_{35}}}&{cp{f_{36}}}&{cp{f_{37}}}&{cp{f_{38}}}&{cp{f_{39}}} \\ {cp{f_{41}}}&{cp{f_{42}}}&{cp{f_{43}}}&{cp{f_{44}}}&{cp{f_{45}}}&{cp{f_{46}}}&{cp{f_{47}}}&{cp{f_{48}}}&{cp{f_{49}}} \\ {cp{f_{51}}}&{cp{f_{52}}}&{cp{f_{53}}}&{cp{f_{54}}}&{cp{f_{55}}}&{cp{f_{56}}}&{cp{f_{57}}}&{cp{f_{58}}}&{cp{f_{59}}} \\ {cp{f_{61}}}&{cp{f_{62}}}&{cp{f_{63}}}&{cp{f_{64}}}&{cp{f_{65}}}&{cp{f_{66}}}&{cp{f_{67}}}&{cp{f_{68}}}&{cp{f_{69}}} \\ {cp{f_{71}}}&{cp{f_{72}}}&{cp{f_{73}}}&{cp{f_{74}}}&{cp{f_{75}}}&{cp{f_{76}}}&{cp{f_{77}}}&{cp{f_{78}}}&{cp{f_{79}}} \\ {cp{f_{81}}}&{cp{f_{82}}}&{cp{f_{83}}}&{cp{f_{84}}}&{cp{f_{85}}}&{cp{f_{86}}}&{cp{f_{87}}}&{cp{f_{88}}}&{cp{f_{89}}} \\ {cp{f_{91}}}&{cp{f_{92}}}&{cp{f_{93}}}&{cp{f_{94}}}&{cp{f_{95}}}&{cp{f_{96}}}&{cp{f_{97}}}&{cp{f_{98}}}&{cp{f_{99}}} \end{array}} \right]\)
Where\(cp{f_{ij}}\) is known as “contract participation factor” i.e. p.u.
Power flow between control area-1 &area-2 can be computed based on the values of the cpf using the Eq. (5).
Tie-line power flow for interconnected lie between area-2 &area-3 can be determined applying the Eq. (6).
Tie-line power flow for interconnected lie between area-3 &area-1 can be calculated based on the values of the cpf employing the Eq. (7).
The actual tie line power flow through tie line between control area-1 and control area-2 is described by Eq. (8)
The power flow through tie line between area-2 and area-3 is expressed by Eq. (9)
The actual tie line power flow through connected line between area-3 and area-1 is represented by Eq. (10)
The difference between actual power of the tie-line should be equal to zero at steady-state. This error is applied to evaluate area control error and can be expressed as Eq. (11).
Area control error of area-i can be expressed
The objective function is represented by:


Multi area multi machine power system in deregulated system. (a) Power system. (b) GRC of thermal unit. (c) GRC of hydro unit. (d) TCSC controller. (e) Contract participation factor (cpf) of DISCOs for with GENCOs.
Coatis optimization algorithm (COA)
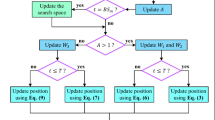
Mohammad Dhegihan developed a new algorithm in 202369 named coatis optimization technique. The proposed COA approach is inspired by the escaping behavior of the predators and the procedure of the coatis to attack iguanas. Flow chart of COA algorithm is depicted in Fig. 3. The location of the coatis is randomly created using Eq. (13):
Where,\({X_i}\)is the location of the\({i^{th}}_{{}}\) coati in exploration zone, \({x_{i,j}}\)is the value of the \({j^{th}}_{{}}\) decision variable, N represent the sum total number of coatis,\({m_{}}\) is the number of decision variables & r is a real number generated randomly between [0, 1], \(l{b_j}\)and\(u{b_j}\)are the minimum and maximum value of the\({j^{th}}_{{}}\) variable, respectively.
The repositioning of coatis relies on two distinct behaviours: their approach towards attacking iguanas and their instinct to evade predators. As a result, the population undergoes updating in two distinct phases.
Phase1: The mathematical modelling of coatis’ population updating is depending on their action plan to encounter iguanas. A subset of coatis ascends a tree to arrive at iguana, intimidating it. Simultaneously, another subset of coatis remains beneath the tree, anticipating the iguana’s fall to the ground. Once the iguana descends, these coatis engage in the attack and capture. This strategic behaviour prompts coatis to explore diverse locations within the search area. The position of the member with best objective function represent the iguana’s location. The mathematical expression for the location of coatis ascending from the tree is defined in Eq. (13).
Upon falling from the tree, the iguana undergoes a random change in location. Depending on the iguana’s new position, coatis adjust their ground locations, as indicated by the mathematical models presented in Eqs. (15) and (16).
\(\begin{gathered} X_{i}^{{P1}}:X_{{i,j}}^{{P1}}=\{ {X_{i,j}}+r.(iguana_{j}^{G} - I.{X_{i,j}})\} ,{F_{iguan{a^G}}}<{F_i} \hfill \\ else \hfill \\ X_{i}^{{P1}}:X_{{i,j}}^{{P1}}=\{ {X_{i,j}}+r.({X_{i,j}} - iguana_{j}^{G})\} \hfill \\ \end{gathered}\)
The assessment of a new location for each coati is permissible for an update only if the objective function value improves; otherwise, the coati maintains its current location. This updating condition, applicable for i = 1, 2,. . ., N is represented by Eq. (17).
Here \(X_{{_{{i,}}}}^{{P1}}\) is the updated location evaluated for the \({i^{th}}_{{}}\)coati, \(X_{{i,j}}^{{P1}}\) is its \({j^{th}}_{{}}\) dimension, \(F_{{_{i}}}^{{P1}}\) is its objective value, r is a random real number in between [0, 1], Iguana represents the iguana’s location, which actually refers to the position of the best member, \(iguan{a_j}\) is its \({j^{th}}_{{}}\)dimension, \({I_{}}\) is an integer, which is randomly selected from the set {1, 2}, \(iguana_{{}}^{G}\) is the position of the iguana on the ground, which is randomly generated, \(iguana_{j}^{G}\)is its \({j^{th}}_{{}}\)dimension, \({F_{iguan{a^G}}}\) is its value of the objective function.
Phase 2: The second phase, named as the exploitation phase, signifies the mathematical modelling of coatis’ behaviour to escape from their location when under attack by predators. This behaviour is mathematically characterized by generating a random position in proximity to each coati’s current location, as outlined in Eqs. (18) and (19).
The new updated location is considered if the objective function corresponding to new position is better, which is represented by Eq. (20).
Here \(X_{i}^{{P2}}\) is the updated location evaluated for the \({i^{th}}_{{}}\)coati, \(x_{{i,j}}^{{P2}}\) is its \({j^{th}}_{{}}\) dimension, \(F_{{_{i}}}^{{P2}}\) is its objective function value, r is a number generated randomly between [0, 1]. For the\({j^{th}}_{{}}\) decision variable \(lb_{j}^{{local}}\) and \(ub_{j}^{{local}}\) are the lower and upper bounded value respectively.‘T’ is maximum number of iteration.

Flow chart of COA algorithm.
Results and discussions
Case study I (Poolco agreement)
In this scenario, all Generation Companies (GENCOs) across the three areas are equally participating in Automatic Generation Control. A load disturbance of 0.03 per unit (p.u.) is introduced specifically in area 1, and this load perturbation is evenly distributed among the three Distribution Companies (DISCOs) operating in the same area. Importantly, the remaining DISCOs in the different control areas are not drawing load from the GENCOs. In this particular case, the Demand Participation Matrix (DPM) is represented in the following manner. Load change in all the DISCOs of area 1 are: DISCO1 = 0.01, DISCO2 = 0.01, DISCO3 = 0.01.
\(DPM=\left[ {\begin{array}{*{20}{c}} {0.333}&{0.333}&{0.333}&0&0&0&0&0&0 \\ {0.333}&{0.333}&{0.333}&0&0&0&0&0&0 \\ {0.333}&{0.333}&{0.333}&0&0&0&0&0&0 \\ 0&0&0&0&0&0&0&0&0 \\ 0&0&0&0&0&0&0&0&0 \\ 0&0&0&0&0&0&0&0&0 \\ 0&0&0&0&0&0&0&0&0 \\ 0&0&0&0&0&0&0&0&0 \\ 0&0&0&0&0&0&0&0&0 \end{array}} \right]\)
Notably, in the DPM matrix, the presence of null values in the corresponding cells indicates the absence of contractual agreements between a DISCO and a GENCO of two separate control area. Powers generated by different GENCOs are evaluated as.
ΔPg1=0.0099, ΔPg2=0.0099, ΔPg3=0.0099, ΔPg4=0, ΔPg5=0, ΔPg6 = 0, ΔPg7= 0, ΔPg8= 0, ΔPg9 = 0.
Under steady-state conditions, it is essential that the power generated by Generation Companies (GENCOs) matches the load demanded by Distribution Companies (DISCOs) within their respective regions. The variations in frequencies across different regions and the power flow through three tie-lines are illustrated in Fig. 1. We have also compiled various time domain specifications, including undershoot (Ush), overshoot (Osh), and settling time (Ts), along with values of ITAE performance index while considering an error margin of 0.02% for these dynamic responses, as detailed in Tables 1 and 2. Optimal values of controller’s parameters tuned with different optimization algorithm have been given in Table 3.
Figure 4 clearly demonstrates that the TID + IDN controller outperforming TID and IDN controllers when tuned with COA optimization technique. Cascaded TID + IDN controller exhibits faster and smoother responses compared to the other controllers, with regards to the dynamic relationship between frequency and tie-line power. The proposed controller effectively minimizes the peaks and troughs in the transient responses of area frequency deviation (Δf) and tie-line power deviation (ΔPtie). Furthermore, it is worth noting that the controller based on the COA outperforms controllers based on PSO, SSA and ISSA as shown in Fig. 5. Convergence characteristics of SSA, PSO, ISSA and COA with proposed controller has been shown in Fig. 6 which validates the defectiveness of the optimization techniques in terms of speed and efficiency. Figure 7 represents the power generation output for case study I.

Comparison of different controllers with COA optimization techniques-case study I. (a) Frequency deviation in area-1. (b) Frequency deviation in area-2. (c) Frequency deviation in area-3. (d) Tie-line power deviation between areas 1–2. (e) Tie-line power deviation between areas 2–3. (f) Tie-line power deviation between areas 3 − 1.

Comparison of perturbed response of variables with different optimization techniques based TID + IDN controller case study I. (a) Frequency deviation in area-1. (b) Frequency deviation in area-2. (c) Frequency deviation in area-3. (d) Tie-line power deviation between areas 1–2. (e) Tie-line power deviation between areas 2–3. (f) Tie-line power deviation between areas 3 − 1.

Convergence characteristics of SSA, PSO, ISSA and COA with proposed controller.

Power generation output in case study I. (a) Power generation output of area-1. (b) Power generation output of area-2. (c) Power generation output of area-3.
Case study II (bilateral agreement)
In this scenario, Distribution Companies in any region have the autonomy to request power from Generating Companies located in any region. Each GENCO adjusts its power generation to meet the requirements of DISCOs based on the transaction allocated by the administrator. For bilateral transactions, the DPM matrix is provided as follows.
Load change in all the DISCOs of area 1 are: DISCO1 = 0.01, DISCO2 = 0.01, DISCO3 = 0.01.
\(DPM=\left[ {\begin{array}{*{20}{c}} {0.1}&{0.1}&{0.2}&{0.1}&{0.1}&{0.1}&{0.2}&{0.2}&{0.3} \\ {0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.2}&0 \\ {0.1}&{0.1}&{0.1}&{0.1}&{0.2}&{0.1}&{0.1}&{0.1}&{0.1} \\ {0.2}&{0.1}&{0.1}&{0.2}&{0.1}&{0.2}&{0.1}&{0.1}&{0.0} \\ {0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.0}&{0.2} \\ {0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.05}&{0.2} \\ {0.1}&{0.2}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.05}&{0.0} \\ {0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1} \\ {0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.1}&{0.2}&{0.1} \end{array}} \right]\)
In this particular context, we are focusing on a bilateral agreement that has been established between three area power systems. All the DISCOs in each area are currently undergoing shifts in their electrical load, with an aggregate load change of 0.03 per unit (pu) occurring in area 1, which is mirrored by an equivalent change in area 2. To delve into the specifics of individual demands from Distribution Companies (DISCOs), in area 1, DISCO1 has a requirement of 0.01, DISCO2 necessitates 0.01, and DISCO3 demands 0.01. On the other side, in area 2, DISCO4 requires 0.01, DISCO5 has a need for 0.01, and DISCO6 has a substantial demand of 0.01. In area-3, DISCO7 requires 0.01, DISCO8 has a need for 0.01, and DISCO9 has a substantial demand of 0.01. The formulation of the Demand Participation Matrix (DPM) has been significantly shaped by the agreements that have been forged between these DISCOs and Generation Companies (GENCOs).
Powers supplied by different GENCOs are calculated.
ΔPg1 = 0.014, ΔPg2 = 0.009, ΔPg3 = 0.01, ΔPg4 = 0.011, ΔPg5 = 0.009, ΔPg6 = 0.0095, ΔPg7 = 0.0085, ΔPg8 = 0.009, ΔPg9 = 0.01.
The power generated in three separate control areas are0.033 p.u,0.0295p.u. and 00.0275p.u., respectively. Consequently, the demand power by all DISCOs is matched to the generated power by all the GENCOs.
Tables 4 and 5 compile the time domain parameters of the responses along with values of ITAE performance index, clearly demonstrating that the proposed controller significantly reduces both overshoots and undershoots. Optimal values of controller’s parameters tuned with four separate optimization algorithm have been given in Table 6.
Figure 8 displays the responses in terms of tie-line power and frequency oscillation. It is evident that the TID + IDN controller, utilized in the existing system during bilateral transactions, exhibits outstanding performance when compared to other controller designs. This is achieved by effectively constraining the amplitudes of peaks and valleys while also reducing the settling times. Furthermore, the COA tuned controllers have yielded superior outputsas compared to those based on PSO, SSA and ISSA based controllers, as observed in Fig. 9. Figure 10 Shows the power generation of each unit in case study II.

Comparison of different controllers with COA optimization techniques-case study II. (a) Frequency deviation in area-1. (b) Frequency deviation in area-2. (c) Frequency deviation in area-3. (d) Tie-line power deviation between areas 1 & 2. (e) Tie-line power deviation between areas 2 & 3. (f) Tie-line power deviation between areas 3 & 1.

Comparison of perturbed response of variables with different optimization techniques based TID + IDN controller -case study II. (a) Frequency deviation in area-1. (b) Frequency deviation in area-2. (c) Frequency deviation in area-3. (d) Tie-line power deviation between areas 1 & 2. (e) Tie-line power deviation between areas 2 & 3. (f) Tie-line power deviation between areas 3 & 1.

Power generation output in case study II. (a). Power generation output of area-1 in case-2. (b) Power generation output of area-2 in case-2. (c) Power generation output of area-3 in case-2.
Case study III (contract violation)
In the context of contract violations, any increase in the contracted power size is covered by the excess power demanded by DISCOs within the same area. In this study, DISCOs in area-1 breach the contract by requesting an additional 0.1p.u power as local load for that area.
Figure 11 illustrates the superior performance of TID + IDN controller in terms of both speed and smoothness compared to its competitors. Tables 7 and 8 provide a summary of the transient specifications, confirming that COA driven TID + IDN controller significantly reduces both undershoot and overshoot. Optimal values of controller’s parameters tuned with four separate optimization algorithm have been given in Table 9. Figure 12 displays generation output of generating units in case study III.

Response of different controllers with COA optimization techniques-case study III. (a) Frequency deviation in area-1. (b) Frequency deviation in area-2. (c) Frequency deviation in area-3. (d) Tie-line power deviation between areas 1 & 2. (e) Tie-line power deviation between areas 2 & 3. (f) Tie-line power deviation between areas 3 & 1.

Power generation output in case study III. (a) Power generation output of area-1 in case-3. (b) Power generation output of area-2 in case-3. (c) Power generation output of area-3 in case-3.
Case study IV: analyzing the robustness of proposed controller with varying step load demand and with sinusoidal input
In this study, we investigate the robustness of the proposed COA based TID + IDN controller for LFC under conditions of frequent load changes. The adaptability of the proposed concept is examined through load variations in all the three areas, each occurring after a 30-second interval. Figure 13 illustrates the step load changes in all the areas over time. Figure 14 displays the deviations in the frequency of areas 1, 2 and 3, along with corresponding changes in tie-line power. The system is simulated using the TID + IDN controller optimized by the COA algorithm for the initial load change.
From Fig. 15, it is evident that the perspective way for addressing the LFC problem results in improved system dynamics, constancy, and resilience of the power system when subjected to dynamic load changes at regular intervals. These findings highlight the efficacy of the COA-driven TID + IDN controller in enhancing the system response in the face of varying and challenging load scenarios.

Dynamic operational shift (Load change) in the area 1, area 2 and area 3.

Transient response due to random change in load demand. (a) Frequency deviation in area-1. (b) Frequency deviation in area-2. (c) Frequency deviation in area-3. (d) Tie-line power deviation between areas 1 & 2. (e) Tie-line power deviation between areas 2 & 1. (f) Tie-line power deviation between areas 3 & 1.

Response due to sinusoidal input in case study I. (a) Sinusoidal input in area-1 in case study I. (b) Frequency deviation in area-1 due to sinusoidal input.
Figure 15 represents the frequency response of area1 due to application of sinusoidal input in area 1 in poolco transaction.
Case study V: sensitivity ANALYSIS
The efficacy of the suggested load frequency control concept has been confirmed through testing under varying parameters within the system’s dynamics. These parameters, including the thermal turbine time constant (Tt) and power system time constant (Tps), were subjected to a 25% change in both positive and negative directions. Figure 12 illustrates the perturbed frequency response across areas 1, 2, and 3 and the fluctuation in the power flow in different tie-line with a 25% variation in Tt. Similarly, Fig. 16 demonstrates the perturbed frequency response across the same areas alongside variations in tie-line powers due to a 25% change in Tps. The figures collectively demonstrate the system’s stability despite fluctuations in various parameters, thus validating the proposed concept’s sensitivity and robustness in addressing load frequency control challenges within power systems.
The suggested control theory for load frequency control has undergone rigorous verification to assess its sensitivity under varying conditions within the system’s dynamics. This validation process involved testing the concept while systematically changing different parameters of the test system. These parameters include the time constants associated with the turbine (Tt) and time constant of generator (Tps). Each of these parameters was subjected to a 25% change in both positive and negative values to simulate real-world operational shifts. To analyse the impact of these parameter variations, dynamic response of frequencies and tie-line power have been shown. Figure 12 displays the perturbed frequency responses observed across areas 1, 2, and 3 of the test system, as well as the resulting fluctuations in tie-line power, due to a 25% variation in the turbine time constant (Tt). Figure 12 illustrates similar perturbed frequency responses across the same areas along with the variations in tie-line powers resulting from a 25% change in the power system time constant (Tps). Despite these parameter variations, the test system consistently demonstrated stability, as depicted in the figures. This resilience justifies the sensitivity and fitness of the suggested concept in effectively addressing the challenges associated with LFC in the system. In essence, the findings validate the concept’s capability to adapt and maintain system stability even under dynamic shifts in various system parameters.

Dynamic response of the system with change in system parameters (Tt &Tps). (a) Frequency deviation in area (1) (b) Frequency deviation in area (2) (c) Frequency deviation in area (3) (d) Tie-line power deviation between areas 1 & 2. (e) Tie-line power deviation between areas 2 & 3. (f) Tie-line power deviation between areas 3 & 1. (g) Frequency deviation in area (1) (h) Frequency deviation in area (2) (i) Frequency deviation in area (3) (j) Tie-line power deviation between areas 1 & 2. (k) Tie-line power deviation between areas 2 & 3. (l) Tie-line power deviation between areas 3 & 1.
Case study VI: Effect of TCSC FACTS controller
The incorporation of renewable energy sources and diverse control mechanisms introduces complexity and non-linearity to the system. The perturbed responses observed in cases I and II clearly indicate heightened the variation in power flow in the tie-line. To mitigate these oscillations, the implementation of a FACT controller, such as the Thyristor-Controlled Series Capacitor (TCSC), is proposed. The TCSC is adept at swiftly and steadily controlling power, offering the potential to mitigate oscillations within a short time frame.
Figure 17 illustrates the output response of the system employing TCSC controller for the Poolco agreement between Generation Companies (GENCOs) and Distribution Companies (DISCOs). The visualization depicts the efficacy of a COA -driven TID_IDN controller in conjunction with an integrated TCSC in minimizing oscillations in tie-line power.
Figure 18 represent the stability of the controller. Gain margin with value 7.02dB and phase margin of 27.5 degree justify the stability of the proposed controller.

Perturbed response for the system with TCSC for Poolco agreement. (a) Frequency deviation in area (1) (b) Frequency deviation in area (2) (c) Frequency deviation in area (3) (d) Tie-line power deviation between areas 1 & 2. (e) Tie-line power deviation between areas 2 & 3. (f) Tie-line power deviation between areas 3 & 1.

Frequency response graph of TID + IDN controller.
Conclusion
The study introduces a novel Coatis Optimization Algorithm (COA) for a TID + IDN controller structure, aiming to manage the disturbances in frequency of a system having three separate control area. The research demonstrates the superiority of the proposed algorithm over existing PSO, SSA, and ISSA algorithms in a deregulated area. Results indicate a notable decrease in performance indices when applying the COA algorithm compared to other techniques. Consequently, the application of the proposed COA-based TID + IDN controller approach is justified. This approach is implemented for frequency regulation in a three-area power system, and simulation outputs reveal its superior efficiency compared to other controllers. The study concludes that the COA-based TID + IDN controller significantly minimizes the maximum peak overshoot and undershoot of the system following small disturbances. Lastly, a sensitivity analysis, performed on system parameters, underscores the efficacy of the suggested technique. Finally, the fruitfulness of the proposed control theory has been tested by incorporating TCSC FACTS controller in the system. While the current work incorporates only a few renewable energy sources in the hybrid system, future research could explore the application of additional sources and different controllers, testing new algorithms in distributed systems. Additionally, hardware validation remains a potential avenue for future investigation. This proposed technique can not be implemented in case of fault analysis because the disturbance applied to the system under analysis is very small as compared to the fault magnitude which is more. This is the limitation of the proposed technique.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Kundur, P. Power System Stability and Control 1st edn (McGraw-Hill, 1994).
Olle, I., Elgerd & Fosha, C. E. Optimum megawatt-frequency control of multiarea electric energy systems. IEEE Trans. Power App. Syst. PAS-89 (4), 556–563 (1970).
Donde, V. & Pai, M. A. Simulation and optimization in an AGC system after deregulation. IEEE Trans. Power Syst. 16, 481–488 (2001).
Arya, Y., Kumar, N. & Nasiruddin, I. AGC of a two-area multisource power system interconnected via AC/DC parallel links under restructured power environment. Optim. Control Appl. Methods 37 (4), 590–607 (2016).
Arya, Y. & Kumar, N. AGC of a multi-area multi-source hydrothermal power system interconnected via AC/DC parallel links under deregulated environment. Int. J. Electr. Power Energy Syst. 75, 127–138 (2016).
Dunna, V. K. et al. Super-twisting MPPT control for grid-connected PV/battery system using higher order sliding mode observer. Sci. Rep. 14 (1), 16597 (2024).
Izci, D., Abualigah, L., Can, Ö., Andiç, C. & Ekinci, S. Achieving improved stability for automatic voltage regulation with fractional-order PID plus double-derivative controller and mountain gazelle optimizer. Int. J. Dyn. Control 1, 1–6 (2024).
Demiroren, A. & Zeynelgil, H. L. GA application to optimization of AGC in three-area power system after deregulation. Int. J. Electr. Power Energy Syst. 29, 230–240. (2007).
Bhatt, P., Roy, R. & Ghoshal, S. P. Optimized multi area AGC simulation in restructured power systems. Electr. Power Energy Syst. 32, 311–322. https://doi.org/10.1016/j.ijepes.2009.09.002 (2010).
Nasiruddin, I., Bhatti, T. S. & Hakimuddin, N. Automatic generation control in an interconnected power system incorporating diverse source power plants using bacteria foraging optimization technique. Int. J. Electr. Power Compon. Syst. 43, 189–199. https://doi.org/10.1080/15325008.2014.975871 (2015).
Mohanty, B. & &Hota, P. K. Comparative performance analysis of fruit fly optimisation algorithm for multi-area multi-source automatic generation control under deregulated environment. IET Gener. Transm. Distrib. 9 (14), 1845–1855. https://doi.org/10.1049/iet-gtd.2015.0284 (2015).
Sekhar, G. C., Sahu, R. K., Baliarsingh, A. K. & Panda, S. Load frequency control of power system under deregulated environment using optimal firefly algorithm. Int. J. Electr. Power Energy Syst. 74, 195–211. (2016).
Rosaline, D. A. & Somarajan, U. Structured H-Infinity controller for an uncertain deregulated power system. IEEE Trans. Ind. Appl. 55 (1), 892–906. https://doi.org/10.1109/TIA.2018.2866560 (2019).
Aribowo, W., Abualigah, L., Oliva, D. & Prapanca, A. A novel modified mountain gazelle optimizer for tuning parameter proportional integral derivative of DC motor. Bull. Electr. Eng. Inf. 13 (2), 745–752 (2024).
Widi Aribowo, R. et al. Controlling parameters proportional integral derivative of DC motor using a gradient-based optimizer. Int. J. Power Electron. Drive Syst. (IJPEDS) 15 (2), 696–703 (2024).
Premkumar, M. et al. Optimal operation and control of hybrid power systems with stochastic renewables and FACTS devices: an intelligent multi-objective optimization approach. Alexandria Eng. J. 93, 90–113 (2024).
Pandya, S. B. et al. Multi-objective RIME algorithm-based techno economic analysis for security constraints load dispatch and power flow including uncertainties model of hybrid power systems. Energy Rep. 11, 4423–4451 (2024).
Alsmadi, O., Abu-Hammour, Z. & Mahafzah, K. Digital systems model order reduction with substructure preservation and fuzzy logic control. Eurasia Proc. Sci. Technol. Eng. Math. 28, 14–22 (2024).
Abualigah, L., Ekinci, S. & Izci, D. Aircraft pitch control via filtered proportional-integral-derivative controller design using Sinh Cosh optimizer. Int. J. Rob. Control Syst. 4 (2), 746–757 (2024).
Alrashed, M. M., Flah, A., Dashtdar, M., El-Bayeh, C. Z. & Elnaggar, M. F. Improving the control strategy of the DVR compensator based on an adaptive notch filter with an optimized PD Controller using the IGWO algorithm. Int. Trans. Electr. Energy Syst. 2024 (1), 5097056 (2024).
Fadheel, B. A. et al. A Hybrid Sparrow Search Optimized Fractional Virtual Inertia Control for Frequency Regulation of Multi-Microgrid System. (IEEE Access, 2024).
Abualigah, L., Izci, D., Ekinci, S. & Zitar, R. A. Optimizing aircraft pitch control systems: a novel approach integrating artificial rabbits optimizer with PID-F controller. Int. J. Rob. Control Syst. 4 (1), 354–364 (2024).
Izci, D. et al. Refined Sinh cosh optimizer tuned controller design for enhanced stability of automatic voltage regulation. Electr. Eng. 29, 1–4 (2024).
Izci, D. et al. A novel control scheme for automatic voltage regulator using novel modified artificial rabbits optimizer. E Prime Adv. Electr. Eng. Electron. Energy 6, 100325 (2023).
Altawil, I. et al. Optimization of fractional order PI controller to regulate grid voltage connected photovoltaic system based on slap swarm algorithm. Int. J. Power Electron. Drive Syst. (IJPEDS) 14, 1184–1200 (2023).
Abualigah, L., Ekinci, S., Izci, D. & Zitar, R. A. Modified elite opposition-based artificial hummingbird algorithm for designing FOPID controlled cruise control system. Intell. Autom. Soft Comput. 38 (2). (2023).
Sarayrah, A., Haj-ahmed, M. A. & Feilat, E. A. A study of a damping control based predictive strategy on an inter-area power system. In 2023 IEEE PES GTD International Conference and Exposition (GTD). 60–66. (IEEE, 2023).
Kalyan, C. N. S., Bajaj, M. & Choudhury, S. Super capacitor and SSSC-based coordinated strategy for performance improvement of diverse source interconnected power system. Mater. Today Proc. https://doi.org/10.1016/j.matpr.2024.03.016 (2024).
Naga Sai Kalyan, C. H., Sambasiva Rao, G., Bajaj, M. & Baseem Khan & Majeed Rashid Zaidan. Frequency regulation of geothermal power plant-integrated realistic power system with 3DOFPID controller. Cogent Eng. 11, 1. https://doi.org/10.1080/23311916.2024.2322820 (2024).
Gopi, P. et al. Performance and robustness analysis of V-Tiger PID controller for automatic voltage regulator. Sci. Rep. 14, 7867. https://doi.org/10.1038/s41598-024-58481-1 (2024).
Kalyan, C. H. et al. Squirrel search algorithm based intelligent controller for interconnected power system. Int. J. Model. Simul. 1–21. (2023).
Srikanth Goud, B. et al. Power quality enhancement in PV integrated system using GSA-FOPID CC-VSI controller. EAI Endors. Trans. Scal. Inform. Syst. https://doi.org/10.4108/eetsis.3974 (2023).
Benazeer Begum, N. K. et al. Application of an intelligent fuzzy logic based sliding mode controller for frequency stability analysis in a deregulated power system using OPAL-RT platform. Energy Rep. (2024).
Mohapatra, B. et al. Optimizing grid-connected PV systems with novel super-twisting sliding mode controllers for real-time power management. Sci. Rep. 14, 4646. https://doi.org/10.1038/s41598-024-55380-3 (2024).
Naga Sai, C. H. et al. Performance assessment of open loop and closed loop generation rate constraint models for optimal LFC of three area reheat thermal system. Front. Energy Res. https://doi.org/10.3389/fenrg.2022.920651 (2022).
Naga Sai, C. H. et al. Salah Kamel, Seagull optimization algorithm based fractional order fuzzy controller for LFC of multi area diverse source system with realistic constraints. Front. Energy Res. https://doi.org/10.3389/fenrg.2022.921426 (2022).
Kalyan, C. H. N. S. et al. and. Water-cycle-algorithm-tuned intelligent fuzzy controller for stability of multi-area multi-fuel power system with time delays. Mathematics 10 (3) 508. https://doi.org/10.3390/math10030508 (2022).
Kalyan, C. H. N. S. et al. Pierluigi Siano, and Salah Kamel, Comparative performance assessment of different energy storage devices in combined LFC and AVR analysis of multi-area power system. Energies 15 (2) 629. https://doi.org/10.3390/en15020629 (2022).
Kalyan, C. N. S. et al. Water cycle algorithm optimized type-II fuzzy controller for load frequency control of multi area multi fuel system with communication time delays. Energies (2021).
Gupta, A., Chauhan, A. & Khanna, R. Design of AVR and ALFC for single area power system including damp-ing control. In 2014 Recent Advances in Engineering and Computational Sciences (RAECS). (2014).
Gupta, M., Srivastava, S. & Gupta, J. R. A novel controller for model with combined LFC and AVR loops of single area power system. J. Inst. Eng. (India) Ser. B 97 (1), 21–29 (2016).
Sambariya, D. K. & Nath, V. Optimal control of auto-matic generation with automatic voltage regulator using particle swarm optimization. Univ. J. Control Autom. 3 (4), 63–71 (2015).
Vijaya, K. R. M., Chandrakala & Balamurugan, S. Simulated annealing based optimal frequency and terminal voltage control of multi source multi area system. Int. J. Electr. Power Energy Syst. 78, 823–829 (2016).
Lal, D. K. & Barisal, A. K. Combined load frequencyand terminal voltage control of power systems using moth flame optimization algorithm. J. Electr. Syst. Inf. Technol. 6 (1), 1–24. (2019).
Naga Sai, C. H., Kalyan & Sambasiva Rao, G. Frequency and voltage stabilisation in combined load frequency con-trol and automatic voltage regulation of multiarea sys-tem with hybrid generation utilities by AC/DC links. Int. J. Sustain. Energy 39 (10), 1009–1029. (2020).
Dekaraja, B. et al. Coordinated control of voltage and frequency in a three-area multisource sys-tem integrated with SMES using FOI-FOPDF controller. In 2020 IEEE 17th India Council International Conference (INDICON). (2020).
Dekaraja, B. & Saikia, L. C. Combined voltage and frequency control of multiarea multisource system usingCPDN-PIDN controller. IETE J. Res. 1–16. https://doi.org/10.1080/03772063.2021.2004456 (2021).
Rajbongshi, R. & Saikia, L. C. Combined control of voltage and frequency of multi-area multisource systemincorporating solar thermal power plant using LSA optimised classical controllers. IET Gener. Transm. Distrib. 11 (10), 2489–2498 (2017).
Rajbongshi, R. & Saikia, L. C. Combined voltage and frequency control of a multi-area multisource system incorporating dish-stirling solar thermal and HVDC link. IET Renew. Power Gener. 12 (3), 323–334 (2018).
Song, Y. H. & Johns, A. Flexible AC Transmission Systems (FACTS) (McGraw-Hill, 1999).
Sharma, M., Bansal, R. K. & Prakash, S. Robustness analysis of LFC for multi area power system integrated with SMES–TCPS by artificial intelligent technique. J. Electr. Eng. Technol. 14 (1), 97–110 (2019).
Dhundhara, S. & Verma, Y. P. Capacitive energy storage with optimized controller for frequency regulation in realistic multisource deregulated power system. Energy 147, 1108–1128. https://doi.org/10.1016/j.energy.2018.01.076 (2018).
Shankar, R., Kumar, A., Raj, U. & Chatterjee, K. Fruit fly algorithm-based automatic generation control of multi-area interconnected power system with FACTS and AC/DC links in deregulated power environment. Int. Trans. Electr. Energy Syst. 29 (1), 2690. https://doi.org/10.1002/etep.2690 (2019).
Sahu, B. K., Pati, S., Mohanty, P. K. & Panda, S. Teachinglearning based optimization algorithm based fuzzy-PID controller for automatic generation control of multi-area power system. Appl. Soft Comput. 27, 240–249. (2015).
Rahman, A., Saikia, L. C. & Sinha, N. Load frequency control of a hydro-thermal system under deregulated environment using biogeography-based optimised three-degree-of-freedom integral-derivative controller. IET Gener. Transm. Distrib. 9 (15), 2284–2293. https://doi.org/10.1049/iet-gtd.2015.0317 (2015).
Nayak, J. R., Shaw, B. & Sahu, B. K. Novel application of optimal fuzzy-adaptive symbiotic organism search based two-degree-of-freedom fuzzy proportional integral derivative controller for automatic generation control study. Int. Trans. Electr. Energy Syst. 12349. https://doi.org/10.1002/2050-7038 (2020).
Saha, A. & Saikia, L. C. Combined application of redox flow battery and DC link in restructured AGC system in the presence of WTS and DSTS in distributed generation unit. IET Gener. Transm. Distrib. 12 (9), 2072–2085. https://doi.org/10.1049/iet-gtd.2017.1203 (2018).
Tasnin, W. & Saikia, L. C. Performance comparison of several energy storage devices in deregulated AGC of a multi-area system incorporating geothermal power plant. IET Renew. Power Gener. 12 (7), 761–772. https://doi.org/10.1049/iet-rpg.2017 (2018).
lalngaihawma, S. s. Datta, s. Das, f. Alsaif, and t s ustun, Automatic generation control of hybrid sources incorporating renewable energy sources and electric vehicles in an interconnected power system considering a deregulated environment. https://doi.org/10.1109/ACCESS.2024.3454229 (IEEE Acess, 2024).
Rangi, S., Jain, S. & Arya, Y. Utilization of energy storage devices with optimal controller for multi-area hydro-hydro power system under deregulated environment. Sustain. Energy Technol. Assess. 52, 102191 (2022).
Debbarma, S., Saikia, L. C. & Sinha, N. AGC of a multi-area thermal system under deregulated environment using a non-integer controller. Electr. Power Syst. Res. 95, 175–183 (2013).
Pappachen, A. & Fathima, A. P. BFOA based FOPID controller for multi area AGC system with capacitive energy storage. Int. J. ElectrEngInf 7 (3), 429–442 (2015).
Das, S. & Saikia, L. C. S Datta,Maiden application of TIDN-(1 + PI) cascade controller in LFC of a multi‐area hydro‐thermal system incorporating EV–Archimedes wave energy‐geothermal‐wind generations under deregulated scenario. Int. Trans. Electr. Energy Syst. 31 (7), e12907, (2021).
Das, S., Datta, S. & Saikia, L. C. Load frequency control of am ulti-source multi‐area thermal system including biogas–solar thermal along with pumped hydro energy storage system using MBA‐optimized 3DOF‐TIDN. Int. Trans. Electr. Energy Syst. 31 (12), e13165, (2021).
Topno, P. N. & Chanana, S. Automatic generation control using optimally tuned tilt integral derivative controller. 2016 IEEE First International Conference on Control, Measurement and Instrumentation (CMI), Kolkata, India 206–210. https://doi.org/10.1109/CMI.2016.7413740 (2016).
38.Topno, Pretty & & Chanana, S. Tilt integral derivative control for two-area load frequency control problem. 1–6. https://doi.org/10.1109/RAECS.2015.7453361 (2015).
Arya, Y. & Kumar, N. BFOA-scaled fractional order fuzzyPID controller applied to AGC of multi-area multi-source electric power generating systems. Swarm EvolComput 32, 202–218 (2017).
G Dei, DK Gupta, BK Sahu, AV Jha, B Appasani, HM Zawbaa, S Kamel. 40. Improved squirrel search algorithm driven cascaded 2DOF-PID-FOI controller for load frequency control of renewable energy based hybrid power system. IEEE Access 10, 46372–46391.
Dehghani, M., Montazeri, Z. & Trojovská, E. P Trojovský, Coati optimization algorithm: A new bio-inspired metaheuristic algorithm for solving optimization problems. 259 110011.
Jena, N. K., Sahoo, S. & Sahu, B. Design of Fractional Order Cascaded Controller for AGC of a Deregulated Power System Journal of Control, Automation and Electrical System. (Springer, 2022).
Dekaraja, B. LC Saikia,coordinated control of ALFC-AVR in multiarea multisource systems integrated with VRFB and TCPS using CFPDN-PIDN controller. IETE J. Res., 1–17 .
Sahoo, S., Jena, N. K., Ray, P. K. & Sahu, B. K. Springer, selfish herd optimisation tuned fractional order cascaded controllers for AGC analysis. Opt. Soft Comput. (2022).
Acknowledgements
This research is funded by European Union under the REFRESH—Research Excellence For Region Sustainability and High-Tech Industries Project via the Operational Programme Just Transition under Grant CZ.10.03.01/00/22_003/0000048; in part by the National Centre for Energy II and ExPEDite Project a Research and Innovation Action to Support the Implementation of the Climate Neutral and Smart Cities Mission Project TN02000025; and in part by ExPEDite through European Union’s Horizon Mission Programme under Grant 101139527. The authors would like to express their sincere gratitude to Stanislav Misak for his exceptional supervision, project administration, and overall guidance throughout the course of this project. His expertise and support were instrumental to its success.
Author information
Authors and Affiliations
Contributions
Geetanjali Dei, Deepak Kumar Gupta: Conceptualization, Methodology, Software, Visualization, Investigation, Writing- Original draft preparation. Binod Kumar Sahu: Data curation, Validation, Supervision, Resources, Writing - Review & Editing. Mohit Bajaj, Vojtech Blazek, Lukas Prokop: Project administration, Supervision, Resources, Writing - Review & Editing.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Dei, G., Gupta, D.K., Sahu, B.K. et al. A novel TID + IDN controller tuned with coatis optimization algorithm under deregulated hybrid power system. Sci Rep 15, 4838 (2025). https://doi.org/10.1038/s41598-025-89237-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-89237-0
Keywords
- Improved squirrel search algorithm (ISSA)
- Squirrel search algorithm (SSA)
- Integral time multiplied by absolute error (ITAE)
- Load frequency control (LFC)
- Particle swarm optimization (PSO)
- PID
- Squirrel search algorithm (SSA)
- Coatis optimization algorithm (COA)
- Tilted integral derivative controller (TID)
- Integral derivative with a first-order filter effect (IDN)
- Independent system operator (ISO)
