
Abstract
We present resonant mechanical systems that exploit diamagnetic levitation to eliminate clamping loss and achieve high quality factors at room temperature, toward enabling precision sensing applications. By engineering centimeter-scale composite plates formed by dispersing graphite microparticles in insulating epoxy and levitating them above arrayed permanent magnets, we demonstrate stable, full levitation of composite devices with masses exceeding 1.5 grams. Simulations and experimental measurements confirm stable three-dimensional trapping. Suppression of eddy current damping allows the levitated resonators to reach quality factors exceeding 32,000 in moderately high vacuum (∼25 µTorr) at room temperature. Residual velocity measurements and closed-loop frequency tracking using a phase-locked loop reveal near-zero passive motion and exceptional frequency stability, with Allan deviation down to 1.5 × 10−6 at 20 s averaging time, demonstrating excellent stability of the levitation system. Furthermore, the devices can readily operate as sensitive magnetometers. These findings position levitated graphite composite plates as a scalable, low-dissipation candidate platform for next-generation inertial sensors and high-performance resonant systems.
Similar content being viewed by others

Introduction
Resonant micro/nanoelectromechanical systems (MEMS/NEMS) are widely used in many precision sensing applications, thanks to their abilities to detect minute changes in physical quantities such as mass and force, which demonstrated sensitivities reaching 1.7 × 10−24 g (Ref. 1) and single-spin detection2, respectively. These devices operate by transducing external perturbations into shifts in their resonance frequencies1,2,3, achieving excellent sensitivities suitable for a broad range of applications such as inertial navigation4,5,6. One of the important limitations in such resonant MEMS/NEMS is energy dissipation, which limits their quality factors (Qs)7,8. A lower Q broadens the resonance peak and amplifies the influence of thermal noise, ultimately degrading frequency stability and thus sensitivity3. Among various loss mechanisms, clamping loss9, vibrational energy leaking through mechanical anchors into the substrate, remains a significant source of dissipation. While advanced device engineering approaches such as strain engineering10,11,12,13,14,15, phononic crystals12,14,15, and soft clamping12,13,14,15 have significantly reduced clamping loss, the presence of physical anchors or tethers inherently limits the achievable Qs in MEMS/NEMS resonators connected to substrates.
Levitation techniques that physically isolate the resonator from mechanical support offer a fundamentally different route to eliminating anchor-induced dissipation. Various levitation schemes have been developed, including optical16,17,18, superconducting19,20, acoustic21,22,23,24, and diamagnetic25,26,27,28 techniques. Each method offers unique advantages and drawbacks. Optical levitation allows for the suspension of micro-objects using laser radiation pressure, but the requirement for high laser power can cause heating and limit scalability18. Superconducting levitation can support large masses with high stability but relies on cryogenic temperatures, introducing significant constraints on size, weight, and power19,20. Acoustic levitation, while effective at manipulating small particles, suffers from air damping and faces challenges in achieving precise position control. Among various levitation schemes, diamagnetic levitation is attractive as it enables passive, room-temperature levitation of millimeter-scale structures without active control or power consumption25,26,27,28. Diamagnetic materials have negative magnetic susceptibility, resulting in a repulsive force when subjected to a gradient in magnetic flux density. This force can counteract gravity, enabling stable, contact-less levitation25,26,27,28.
Despite its promises, diamagnetic levitation faces several challenges. The intrinsically weak magnetic susceptibility of diamagnetic materials limits the achievable vertical levitation force, constraining the size and mass of levitated structures. This poses a significant barrier for applications such as inertial sensing, where large proof masses are essential for achieving high sensitivity. Moreover, commonly used diamagnetic materials such as pyrolytic graphite are electrically conductive, making them susceptible to eddy current damping when moving through spatially varying magnetic flux density. This loss mechanism can significantly reduce the mechanical Q, compromising the advantages gained by eliminating clamping loss25,27.
In this work, we investigate large-mass, centimeter-scale diamagnetically levitated mechanical resonators that address both challenges through the co-design of magnet arrays and resonator materials (Fig. 1). By engineering the geometry and arrangement of an array of permanent magnets with high field gradients, we enable stable levitation of devices exceeding 1.5 grams in mass, which is much higher than previous demonstrations25,27. Simultaneously, we develop a fabrication process with graphite particles embedded in an insulating epoxy resin that maintains strong diamagnetic responses while suppressing eddy current damping, enabling high-Q mechanical resonances. The stability of the levitated devices is confirmed by measuring the residual velocity and Allan deviation of real-time tracking of the resonance frequency.

a Schematic illustration of a graphite-epoxy diamagnetic plate stably levitated above an array of cubic Nd2Fe14B permanent magnets with alternating magnetization. b Top view of a stably levitated composite plate (length of 38.2 mm, width of 29.1 mm, thickness of 1.0 mm, and mass of 1.58 g) positioned next to a quarter (coin in the United States) for comparison. Inset displays a zoomed-in view of the dielectric mirror mounted on the levitated device. c Side view of the levitated composite plate showing a levitation height of 50 μm. d Side view of the device demonstrates three-dimensional (3D) trapping of the levitated plate through a balance of vertical and lateral diamagnetic forces combined with gravitational force. Scale bars in (b) and (c) are 10 mm
Results and Discussions
Simulation and design of levitated composite plates
We engineer composite materials by dispersing graphite microparticles into an electrically insulating epoxy resin. When positioned above an array of permanent magnets, these composites experience a vertical diamagnetic repulsive force along with a lateral restoring force, enabling stable and robust three-dimensional (3D) levitation (Fig. 1d). To explore and further understand the levitation, we design and simulate large-mass diamagnetically levitated composite plate resonators using finite element methods (FEM) in COMSOL Multiphysics™. Graphite, owing to its layered crystal structure, exhibits pronounced magnetic anisotropy: highly oriented pyrolytic graphite demonstrates in-plane susceptibilities of χx = χy = –85 × 10-6 and an out-of-plane susceptibility of χz = –450 × 10−6 (Ref. 28). Within the graphite-dielectric composite plate, since the graphite particles are randomly oriented, we approximate its response as isotropic, applying a uniform diamagnetic susceptibility in the range of –160 × 10−6 to –170 × 10−6 across all directions. We build an array of 6.35 mm length cubic neodymium-iron-boron (Nd₂Fe₁₄B) permanent magnets with alternating magnetization (Fig. 1a, d) to serve as the base of the levitation system in our model.
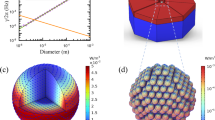
Figure 2 shows the simulated magnetic flux density distribution from the array of permanent magnets. Based on the simulated results, we then compute the diamagnetic force by considering dimensions and location of the composite plate above the permanent magnet base using the following expression:28
where V is the composite volume, M is the magnetization, B is the magnetic flux density, μ0 is the vacuum permeability, and Vf is the graphite volume fraction (graphite volume / total composite volume). In this study, the fabricated devices hold Vf ≈ 39–40%. We first simulate magnetic flux density from the permanent magnets (Fig. 2a) and then estimate both the diamagnetic levitation force and the corresponding levitation height. In this simulation, we use the device with dimensions of length L = 24.5 mm, width w = 24.5 mm, and thickness t = 1.0 mm, and mass m = 928 mg, the levitation force is calculated by using Eq. (1) with varying air gap (z) between the magnets and the composite plate. In Fig. 2b, the estimated FB is shown as blue hollow circles, and the net force, Ftotal = FB−FG, where FG = 9.8 m/s2 × m is the gravitational force, is indicated by red hollow squares. The levitation height is determined to be h = 0.07 mm by identifying the point at which Ftotal = 0 N. We study h in different device dimensions ranging from L = w = 12 mm to 37 mm with fixed t = 1 mm (Fig. 2c). Notably, we find that the magnetic levitation force FB per unit area remains nearly constant across devices with varying dimensions when positioned above the magnet array. This results in a consistent levitation height h ≈ 50–100 μm, regardless of the overall device width, length, and mass. Importantly, this indicates that as long as the composite thickness is maintained, much larger devices with greater in-plane dimensions and mass can still achieve stable levitation. This scalability is a key advantage for extending the platform to more massive or functional components, especially useful for inertial sensing. To study the magnetic stiffness at equilibrium, defined as k = – dFtotal/dz, where z is the vertical displacement (Fig. 2d). At the levitation height, we find k = 18 N/m. This leads to a vertical resonance frequency of the levitated composite plate: f = (k/m)1/2/(2π) = 22.2 Hz. We then estimate the potential energy of the levitated devices. The diamagnetic potential energy \(E=-\int {F}_{{\rm{total}}}dz+c\) is estimated using the force profile (Fig. 2b), where a constant c is added to ensure E = 0 when the device is not vibrating. We note that the calculated potential deviates from the simple harmonic resonance model obtained from ESH = kz2/2 (red dashed line in Fig. 2e), indicating that the system could exhibit nonlinearity under large displacements. In addition to vertical levitation, the levitated composite plate holds an in-plane restoring force when displaced laterally from equilibrium (Fig. 2f). The diamagnetic force counteracts both vertical and lateral displacements, ensuring stable 3D confinement above the permanent magnets, and the composite plate reliably returns to its equilibrium position after external perturbations.

a FEM simulated magnetic flux density generated from an array of cubic permanent magnets with alternating magnetization. b Vertical diamagnetic force (blue hollow circle) and total net force (red hollow square) with gap between magnets and square composite device (length and width L = w = 24.5 mm, thickness t = 1 mm, mass m = 928 mg, and graphite volume fraction Vf = 40%). Red arrows show a levitation height of h = 0.07 mm. c Estimated levitation height of the square composite devices. The width of devices is changed from w = 12 mm to 37 mm while the thickness is fixed to t = 1 mm. Diamagnetic susceptibility in the range of –160 × 10-6 to –170 × 10-6 is employed. d Estimated diamagnetic stiffness from b. e Calculated diamagnetic potential energy. The red dashed line shows potential from the simple harmonic resonator model. f Simulated lateral restoring force
Fabrication of composite plate resonators
High-purity (>99%) graphite micropowders (SkySpring Nanomaterials) with an average particle diameter of approximately 1−5 μm is used for composite device fabrication. The two components of epoxy (Epoxy Technology) are thoroughly mixed for 5 minutes in a glass beaker. Graphite powder and isopropyl alcohol (IPA) are then added and uniformly blended into the epoxy. IPA is added during the mixing to reduce its viscosity, ensuring homogeneous blending with the paste (Fig. 3a). Composites with different Vf are fabricated by precisely measuring the mass of epoxy and graphite powder using an analytical balance. Next, the mixed graphite powder and epoxy paste are centrifuged at 3500 rpm to achieve uniform dispersion of the graphite particles (Fig. 3b). The well-mixed paste is then transferred into square cavities within a custom-designed rubber mold and left at room temperature and ambient pressure for one hour to allow complete evaporation of IPA (Fig. 3c). This step helps minimize porosity before high-temperature curing. The mixed paste is then cured in a hot oven at 75 °C for five hours (Fig. 3d). After curing, the composite is removed from the mold and polished with ultra-fine sandpaper to achieve a smooth surface and the desired thickness (Fig. 3e). A dielectric mirror is mounted on the fabricated composite for efficient light reflection from the device.

a Mixing graphite powder with epoxy resin, followed by the addition of isopropyl alcohol (IPA). (b) Centrifuging the mixture to ensure uniform dispersion. c Pouring the mixed components into the pre-fabricated square mold. d Curing the mold in a hot oven at 75 °C for 5 hours. e Shaping the cured composite into squares and polishing the surface to achieve the desired thickness
Resonance characteristics of levitated devices
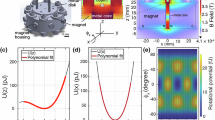
We investigate the resonance characteristics of the fabricated devices by using a custom-built optical interferometry system (Fig. 4) to measure the mechanical resonances of graphite/dielectric composite devices. The composite sample, along with an array of cubic permanent magnet blocks, is mounted inside a vacuum chamber. To excite the resonance motions of the composite, both AC and DC signals are applied to the magnets. An AC voltage (vAC) is sourced from a lock-in amplifier (Zurich Instruments), and a DC voltage (VDC) is supplied by a voltage source. The resulting electrostatic and gradient forces excite vibrational modes of the devices. A 633 nm He-Ne laser beam is focused onto the center of the dielectric mirror on the composite plate through a 10× microscope objective. The total power is kept below 100 μW to minimize the laser heating effect. The reflected light is modulated by the motion of the composite plate and collected by the same objective and detected by a photodetector (PD). The PD converts the optical signal into an electrical signal, which is analyzed by the lock-in amplifier to extract the vibration amplitude response. The performance of the composite is characterized by using both the frequency-domain sweep method and the time-domain ring-down measurement.

A testing permanent magnet is used for demonstration of sensing magnetic flux density. BS beam splitter, BE beam expander
Three devices with different dimensions and masses are first characterized through frequency sweep measurements. All three devices exhibit resonance frequencies in the range of 20–23 Hz (Fig. 5a–c), showing good agreement with simulation results. For example, Device #1 with smaller dimensions of L = 18.7 mm, w = 16.0 mm, t = 1.3 mm, and m = 347 mg, shows a resonance peak at 21.43 Hz. Similarly, much larger Device #2 (L = 29.0 mm, w = 21.6 mm, t = 1.0 mm, and m = 680 mg) and Device #3 (L = 32.4 mm, w = 26.2 mm, t = 1.0 mm, and m = 1145 mg), exhibit major resonance peaks at 22.32 Hz and 19.97 Hz, respectively. From FEM simulations, we have identified two primary resonance motions of the levitated composites: (i) vertical translation of the entire body (translational mode) and (ii) tilting of the body (rotational modes). In the experiments, a small mirror is positioned at the center of each composite, and the laser is focused on this mirror for resonance detection. Since the mirror lies along a nodal line of the rotational modes, the system is inherently sensitive to translational motion but relatively insensitive to rotational motion. In Fig. 5b, weak signatures of the rotational mode are also observed (f1 = 21.16 Hz), which we attribute to slight deviations of the mirror from the nodal line normally located at the geometric center of the rotational mode due to minor asymmetries in device shape.

a Resonance spectrum of Device #1 (L = 18.7 mm, w = 16.0 mm, t = 1.3 mm, Vf = 40%, h = 0.2 mm, and m = 347 mg) in 22μTorr vacuum. b Measured resonance curve of Device #2 (L = 29.0 mm, w = 21.6 mm, t = 1.0 mm, Vf = 39%, h = 0.05 mm and m = 680 mg) in 24 μTorr. c Frequency-domain resonance curves for Device #3 (L = 32.4 mm, w = 26.2 mm, t = 1.0 mm, Vf = 40%, h = 0.1 mm, and m = 1145 mg) measured in 25 μTorr. d–f Envelope of ringdown responses of Device #1-3, respectively. Qs are determined by fitting the envelopes (red dashed lines). (All scale bars are 5 mm). Top-view (a–c) and side-view (d–f) device images are shown as insets. Insets next to the resonance curves in (a–c) illustrate the corresponding simulated resonance mode shapes, with red arrows indicating the vibration direction
Next, we examine the time-domain ring-down response of each device, as the resonance peaks observed in the frequency domain are too narrow to reliably extract the Q. The devices are driven into resonance by applying both AC and DC voltage at their major resonance frequency. After the excitation signals are turned off, the free oscillation is recorded, and the amplitude envelope is analyzed (Fig. 5d-f). The envelope of the underdamped vibration follows an exponential decay given by11,13,14,15,25,27,29
where A0 is the initial vibration amplitude, f is the resonance frequency, and τ is the time. From these measurements under vacuum (25 μTorr), we extract high Qs of Q = 15,000 and Q = 17,000 for Device #1 and Device #2, respectively. We note that Device #3 exhibits a significantly higher Q of Q = 32,000. Under this vacuum level, air damping has a negligible influence on device performance25,27,30. We attribute this enhancement to improved homogeneity in the spatial distribution of graphite particles within the composite, which minimizes electrical conductive paths. The incorporation of an electrically insulating epoxy serves to decouple adjacent graphite particles, thereby suppressing large-scale eddy current formation in response to magnetic flux density gradients during oscillation. This effective reduction in electromagnetic dissipation leads to enhanced Q while preserving strong diamagnetic levitation. We have further increased the device size and mass, successfully achieving full levitation of a device with a mass of up to 1.5 grams (see Supplementary Information S2). Notably, our devices exhibit significantly higher levitation masses compared to those of previously demonstrated composite resonators (Table 1).
Stability of levitated devices and magnetic flux density sensing
One important indicator of stability in levitated devices is the residual velocity, the small, nonzero velocity that remains even when no voltage or power is applied to the system. To measure this, we employ the precisely calibrated laser interferometry system equipped with a sub-10nm resolution piezoelectric stage and feedback control to monitor the displacement of the device in its undriven state. For the measurement, the device is placed inside a vacuum chamber, and its displacement is recorded without any applied electrical signals. We note that any external perturbations, such as vibrations from the vacuum pump, are inherently included in this measurement, making it a rigorous test of passive stability.
Figure 6a, b show the representative time-domain displacement traces of Device #1 recorded under undriven conditions. While two representative traces are presented, multiple measurements are conducted to verify consistency, and Fig. 6c presents the averaged results obtained from 30 repeated measurements. Despite the absence of external controls, the system exhibits only small motion, with fluctuations ranging from approximately −0.1 nm to +0.1 nm (Fig. 6c). The displacement data in Fig. 6c is differentiated to calculate velocity (v = dz/dτ), as shown in Fig. 6d. The resulting velocity histogram in Fig. 6e follows a normal distribution centered at 0 μm/s, indicating that most residual velocities are close to zero, with only occasional deviations in either direction. The symmetric distribution confirms the absence of directional bias. From the width of the fitted Gaussian curve (blue dashed line in Fig. 6e), we estimate the residual velocity to be v ≈ 0 ± 1μm/s. This remarkably low velocity, achieved without any active control such as feedback cooling27, demonstrates the inherent stability of the levitated composite device. A narrow, symmetric distribution centered near zero not only indicates low amplitude (and velocity) noise but also reflects a stable, unbiased trapping potential. As such, residual velocity may serve as a key performance metric alongside the Q and frequency stability, particularly for inertial sensors such as accelerometers and gyroscopes.

a, b Time-domain displacement trace obtained in 25 μTorr recorded under undriven conditions. c Averaged results obtained from 30 repeated time-domain displacement measurements. d Instantaneous velocity calculated as the first derivative of the displacement signal (c). e Statistical distribution of residual velocity. The blue dashed line indicates a fit to a normal distribution
To further systematically investigate the stability of the levitated devices, we examine the frequency stability of the complete plate resonator (Device #2). Based on open-loop calibration and quantification, we employ an optoelectronic phase-locked loop (PLL) in a closed-loop feedback configuration31,32,33 to track the resonance frequency of the levitated device. This PLL enables continuous and accurate monitoring of the resonance frequency, allowing us to assess both short-term and long-term stability. The loop starts with a phase detector that compares the signal from the levitated resonator with the output of a voltage-controlled oscillator (VCO). The resulting phase error signal indicates any frequency mismatch between the two. This signal is then processed by a loop filter, which stabilizes the system and controls the loop’s response. The loop filter also incorporates a proportional-integral-derivative (PID) controller to refine the feedback control. The filtered signal adjusts the VCO output, ensuring it remains aligned with the resonator’s frequency in real time.
After establishing the PLL, we first investigate the stability of the levitated plate under an externally applied magnetic flux density. To introduce this perturbation, we position a small testing permanent magnet near the device, with the magnetic flux density controlled by adjusting the distance between the magnet and the device. The resulting magnetic flux density at the device location is calibrated using a Hall sensor and measured to be 2 mT. Despite this external magnetic perturbation, the device maintained stable levitation. Upon applying the magnetic flux density (red line in Fig. 7b), we observe a shift in the resonance frequency, clearly demonstrating the system’s capability for magnetic flux density sensing (Fig. 7b). Based on the measured frequency shift, we determine a magnetometer responsivity of ℜ = 0.3 Hz/T.

a Schematic of the PLL system used to track the resonance frequency of the levitated composite resonator. b Frequency shift in response to an externally applied magnetic flux density generated by a small cubic testing permanent magnet (6.35 mm side length). The additional magnetic flux density at the device location is adjusted by varying the distance between the magnet and the device, and is calibrated to be approximately 2 mT. Red dashed lines indicate the timing and duration of the applied magnetic flux density. c Time-domain resonance frequency tracking measurement showing sub-millihertz (<mHz) fluctuation. d Allan deviation as a function of averaging time, exhibiting high frequency stability of the resonator
Next, we investigate the long-term stability of the device in the absence of any intentional physical disturbances, while still in ordinary lab conditions. Over a continuous measurement period of around 2000 s, we have tracked short-term frequency fluctuations and long-term drift of Device #2. Figure 7c confirms that the resonance frequency remains within a narrow variation range of sub-millihertz (δf < 1 mHz) over the entire measurement period, demonstrating excellent frequency stability of the levitated devices. The measured frequency stability is quantified using the Allan deviation, defined as34,35:
where \(\overline{{f}_{i}}\) is the measured average frequency in the discrete time interval of \({\tau }_{A}\), \({f}_{0}\) is the resonant frequency and \(N\) is the number of frequency samples. Then the measured Allan deviation is converted to frequency noise using \({S}_{f}^{1/2}=2{f}_{0}{({\rm{\pi }}{\tau }_{{\rm{A}}})}^{1/2}{\sigma }_{{\rm{A}}}({\tau }_{{\rm{A}}})\) (Refs. 36,37). From the measured Allan deviation (Fig. 7d), we find σA = ∼1.5 × 10−6 at averaging time τΑ=20 s, corresponding to an extremely low frequency noise of Sf1/2 = 500 μHz/(Hz)1/2. These results indicate excellent frequency stability over both short and long durations. Some observed spikes in the resonance frequency can be further reduced by completely isolating environmental influences like mechanical vibrations from human activity and the vacuum pump. From the measured frequency noise, we estimate the magnetic sensing limit of the levitated plate magnetometer. Specifically, we calculate the noise-equivalent magnetic flux density, SM1/2 = Sf1/2/(2πℜ) = 260 μT/Hz1/2 at 20 s averaging time. This value sets the ultimate resolution limit of our device and defines the minimum detectable magnetic flux density. While this performance is comparable to that of conventional Hall sensors, it successfully demonstrates and validates the magnetic sensing capability of our levitated system.
To assess the potential of our levitated devices for inertial sensing applications, we evaluate their acceleration sensitivity. The thermally limited acceleration sensitivity is given by25,27:
where kB is the Boltzmann constant, T is the temperature. For our levitated plate, the estimated acceleration sensitivity reaches as low as Sa1/2≈2.4 × 10-11agrav/(Hz)1/2, where agrav is the gravitational acceleration. This excellent sensitivity is enabled by the combination of a large resonator mass and a high Q. Compared to previously reported levitated devices at room temperature based on composite structures, our device exhibits significantly improved performance (Table 1).
Conclusions
We have demonstrated a scalable and stable platform for high-performance mechanical sensing based on diamagnetically levitated graphite composite plates. Through a co-design of magnet array geometry and material composition for constructing the devices, we overcome the typical limitations of weak diamagnetic forces and eddy current damping, enabling stable levitation of centimeter-scale devices with gram-level masses. Our devices have exhibited high mechanical Qs (up to 32,000), low residual velocities, and exceptional frequency stability over extended periods. Notably, the thermal noise-limited acceleration sensitivity reaches 2.4 × 10−11agrav/Hz1/2. These findings demonstrate the promise of anchor-less mechanical resonator architectures in advancing inertial sensing4,5,6 and other precision measurement technologies1,2, especially where low dissipation, passive operation, and environmental resilience are critical.
References
Chaste, J. et al. A nanomechanical mass sensor with yoctogram resolution. Nat. Nanotechnol. 7, 301–304 (2012).
Rugar, D., Budakian, R., Mamin, H. J. & Chui, B. W. Single spin detection by magnetic resonance force microscopy. Nature 430, 329–332 (2004).
Ekinci, K. L., Yang, Y. T. & Roukes, M. L. Ultimate limits to inertial mass sensing based upon nanoelectromechanical systems. J. Appl. Phys. 95, 2682–2689 (2004).
Acar, C. & Shkel, A. MEMS Vibratory Gyroscopes: Structural Approaches to Improve Robustness. (Springer Publishing Company, 2008).
Bhave, S. A. et al. An integrated, vertical-drive, in-plane-sense microgyroscope. In Proc. 12th International Conference on Solid-State Sensors (TRANSDUCERS 2003), 171–174 (IEEE, Boston, MA, USA, 2003).
Partridge, A. et al. A high-performance planar piezoresistive accelerometer. J. Microelectromech. Syst. 9, 58–66 (2000).
Schmid, S., Villanueva, L. G. & Roukes, M. L. Fundamentals of Nanomechanical Resonators. (Springer Publishing Company, 2016).
Imboden, M. & Mohanty, P. Dissipation in nanoelectromechanical systems. Phys. Rep. 534, 89–146 (2014).
Judge, J. A., Photiadis, D. M., Vignola, J. F., Houston, B. H. & Jarzynski, J. Attachment loss of micromechanical and nanomechanical resonators in the limits of thick and thin support structures. J. Appl. Phys. 101, 13521 (2007).
Verbridge, S. S., Parpia, J. M., Reichenbach, R. B., Bellan, L. M. & Craighead, H. G. High quality factor resonance at room temperature with nanostrings under high tensile stress. J. Appl. Phys. 99, 124304 (2006).
Thompson, J. D. et al. Strong dispersive coupling of a high-finesse cavity to a micromechanical membrane. Nature 452, 72–75 (2008).
Engelsen, N. J., Beccari, A. & Kippenberg, T. J. Ultrahigh-quality-factor micro- and nanomechanical resonators using dissipation dilution. Nat. Nanotechnol. 19, 725–737 (2024).
Reinhardt, C., Müller, T., Bourassa, A. & Sankey, J. C. Ultralow-noise SiN trampoline resonators for sensing and optomechanics. Phys. Rev. X 6, 21001 (2016).
Beccari, A. et al. Strained crystalline nanomechanical resonators with quality factors above 10 billion. Nat. Phys. 18, 436–441 (2022).
Tsaturyan, Y., Barg, A., Polzik, E. S. & Schliesser, A. Ultracoherent nanomechanical resonators via soft clamping and dissipation dilution. Nat. Nanotechnol. 12, 776–783 (2017).
Li, T., Kheifets, S. & Raizen, M. G. Millikelvin cooling of an optically trapped microsphere in vacuum. Nat. Phys. 7, 527–530 (2011).
Monteiro, F., Ghosh, S., Fine, A. G. & Moore, D. C. Optical levitation of 10-ng spheres with nano-g acceleration sensitivity. Phys. Rev. A 96, 63841 (2017).
Ma, J. et al. Observation of nonlinear dynamics in an optical levitation system. Commun. Phys. 3, 197 (2020).
Timberlake, C., Gasbarri, G., Vinante, A., Setter, A. & Ulbricht, H. Acceleration sensing with magnetically levitated oscillators above a superconductor. Appl. Phys. Lett. 115, 224101 (2019).
Vinante, A. et al. Ultralow mechanical damping with Meissner-levitated ferromagnetic microparticles. Phys. Rev. Appl. 13, 64027 (2020).
Andrade, M. A. B., Pérez, N. & Adamowski, J. C. Particle manipulation by a non-resonant acoustic levitator. Appl. Phys. Lett. 106, 14101 (2015).
Xie, W. J. & Wei, B. Dependence of acoustic levitation capabilities on geometric parameters. Phys. Rev. E 66, 26605 (2002).
Vieira, S. L. & Andrade, M. A. B. Translational and rotational resonance frequencies of a disk in a single-axis acoustic levitator. J. Appl. Phys. 127, 224901 (2020).
Xie, W. J., Cao, C. D., Lü, Y. J. & Wei, B. Levitation of iridium and liquid mercury by ultrasound. Phys. Rev. Lett. 89, 104304 (2002).
Chen, X., Ammu, S. K., Masania, K., Steeneken, P. G. & Alijani, F. Diamagnetic composites for high-Q levitating resonators. Adv. Sci. 9, 2203619 (2022).
Chen, X., de Lint, T., Alijani, F. & Steeneken, P. G. Nonlinear dynamics of diamagnetically levitating resonators. Nonlinear Dyn 112, 18807–18816 (2024).
Tian, S. et al. Feedback cooling of an insulating high-Q diamagnetically levitated plate. Appl. Phys. Lett. 124, 124002 (2024).
Niu, C., Lin, F., Wang, Z. M., Bao, J. & Hu, J. Graphene levitation and orientation control using a magnetic field. J. Appl. Phys. 123, 44302 (2018).
Lee, J., Wang, Y., Zorman, C. A. & Feng, P. X.-L. 3C-SiC phononic waveguide for manipulating mechanical wave propagation. J. Appl. Phys. 135, 204501 (2024).
Yasmin, S, Roy, P, Wang, Y, Feng, P. X.-L., Lee J. High-Q diamagnetically levitated mechanical resonators with time-domain ring-down measurements. In Proc. 23rd International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS 2025). 1580–1583 https://doi.org/10.1109/Transducers61432.2025.11109605.31 (IEEE, Orlando, FL, USA, 2025).
Yang, Y. T., Callegari, C., Feng, X. L., Ekinci, K. L. & Roukes, M. L. Zeptogram-scale nanomechanical mass sensing. Nano Lett 6, 583–586 (2006).
Kim, J. et al. Ultra-stable MEMS clock with 53 parts-per-trillion fractional frequency stability at 8 h. In Proc. 38th International Conference on Micro Electro Mechanical Systems (MEMS 2025) 205–208 https://doi.org/10.1109/MEMS61431.2025.10918176 (IEEE, Kaoshiung, Taiwan, 2025).
Watkins, C. A., Lee, J., McCandless, J. P., Hall, H. J. & Feng, P. X.-L. Single-crystal silicon thermal-piezoresistive resonators as high-stability frequency references. J. Microelectromech. Syst. 34, 15–23 (2025).
Lee, J. & Feng, P. X.-L. Self-sustaining MoS2 nanomechanical oscillators and feedback cooling. Appl. Phys. Lett. 119, 243506 (2021).
Feng, X. L., White, C. J., Hajimiri, A. & Roukes, M. L. A self-sustaining ultrahigh-frequency nanoelectromechanical oscillator. Nat. Nanotechnol. 3, 342–346 (2008).
Cleland, A. N. & Roukes, M. L. Noise processes in nanomechanical resonators. J. Appl. Phys. 92, 2758–2769 (2002).
Zheng, X.-Q. et al. Beta gallium oxide (β-Ga₂O₃) nanoelectromechanical transducer for dual-modality solar-blind ultraviolet light detection. APL Mater 7, 022523 (2019).
Acknowledgements
We thank the support from DARPA LeviTAS Program (Grant no. HR00112490436) and discussions with Dr. Sunil Bhave. We also thank Kiva McCracken for helpful discussions. The views, opinions and/or findings expressed are those of the authors and should not be interpreted as representing the official views or policies of DARPA or the U.S. Government
Author information
Authors and Affiliations
Contributions
J.L. and P.X.-L.F. conceived the project, planned, and supervised the research. P.R., S.Y., and Y.W. conducted simulations, experiments, and analyzed the data. All authors contributed to the manuscript preparation and revision.
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Ethics Approval and Consent to Participate Not Applicable
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Roy, P., Yasmin, S., Wang, Y. et al. Highly stable diamagnetically levitated mechanical resonators with large masses exceeding 1.5 gram. Microsyst Nanoeng 12, 79 (2026). https://doi.org/10.1038/s41378-025-01122-y
Received:
Revised:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41378-025-01122-y
