
Abstract
Wire-form shape memory alloy (WF-SMA) actuators have become integral components in numerous advanced applications ranging from robotics and aerospace to biomedicine thanks to their exceptional energy density, compact architectures and versatile actuation modes. Serving as a unique bridge between high-force actuation and material compliance, WF-SMAs enable the fabrication of intelligent soft materials and stretchable electronic systems. This work contributes a comprehensive and systematic assessment of WF-SMA actuators, including actuation modeling methodologies, typical actuator configurations, control strategies, and cutting edge applications in multiple fields. We firstly revisit the SMA actuation models with an emphasis on the theoretical foundation as well as current challenges in representing SMA’s nonlinear, thermodynamic and actuation behaviors. Then, actuator design paradigms are classified according to the characteristic of the mechanical load (i.e. linear, nonlinear and differential) followed by briefly exploring the large-stroke strategies. Control approaches for manipulating WF-SMA systems are also surveyed covering a spectrum from conventional algorithms to smart strategies based on SMA-specific models, neural networks and integrated self-sensing methods. Drawing upon this assessment, we elucidate the key challenges that impede the widespread and practical application of SMA technologies, and suggest that future fabrication of WF-SMA actuators should increasingly rely on the integration of micro–nano fabrication techniques, flexible electronics, and multifunctional materials. Another promising direction for future research would be to prioritize the development of integrated modeling-design-control frameworks. Leveraging deep learning within the framework to navigate the complex nonlinearities of SMAs will directly improve operational performance and long-term reliability.

Similar content being viewed by others
Introduction
Shape memory alloys (SMAs) are a class of smart materials characterized by two unique properties: the shape memory effect (SME) and superelasticity (SE). The SME describes the ability of SMAs to revert to their initial shape after being plastically deformed into a different shape (i.e., shape or size), through a phase transformation triggered by thermal activation1. SE manifests above the austenite finish temperature as the ability of the alloy to withstand substantial deformation under load and fully revert to its initial shape once the load is removed. This strain recovery is a purely mechanical process driven by stress-induced phase transformation2. These distinct properties make SMAs highly effective as actuators. When compared with traditional actuation technologies like electric motors or pneumatic and hydraulic systems, SMA actuators present a compelling suite of characteristics. These include high energy density, low weight, and compact structure, along with the benefit of quiet and clean operation3. Consequently, employing SMA actuation can reduce a system’s total mass and volume while simultaneously increasing its compactness and response speed. Due to these advantages, SMAs have been widely leveraged in diverse fields such as aerospace4,5, biomedicine6, robotics7, wearable device8 (Fig. 1).

Effective modeling, design, and control strategies have enabled the widespread application of WF-SMA actuators in robotics, aerospace, biomedical engineering, and wearable technologies
Common forms of SMAs include wire9, tubular/rod10, sheet11,12, spring13, and composite14. Among these, wire-form SMAs (WF-SMAs) offer distinct advantages such as lower dimensional complexity, simple actuation, flexible arrangement, and rapid response, making them highly suitable for applications in soft intelligent actuators, adaptive sensors, and stretchable electronic systems. Since the modeling, design and control principles for spring-form SMAs are largely analogous to those for all wires, this review treats the spring as principal configuration derived from the wire form.
The structural design and actuation control of WF-SMA actuators are key technologies governing the performance and successful deployment of WF-SMA actuators. Recently, considerable research efforts have been directed toward constitutive models, actuator design, and actuator control of SMA15,16. Despite these promising attributes, obstacles to the widespread adoption of SMA actuators are still remained. The intrinsic nonlinearity and hysteresis of the alloys create difficulties in predictive modeling, which in turn hinders their effective design, control, and implementation17. With the unprecedent advancements in computer science, neural networks (NNs) and machine learning (ML) have gained globally application successes in medicine18, materials19, robotics20, and other fields. Integrating machine learning techniques into SMA modeling and control sectors may further improve model fidelity and control precision, which will create new opportunities and challenges for developing WF-SMA actuators with improved performances.
A comprehensive revisiting tour of the modeling, design and control of WF-SMA actuators serves to consolidate recent advancements and distill the latest developments. It thereby provides a valuable foundation that enhances research efficiency and inspires future innovation. So far, several studies have summarized SMA constitutive models, control methods and applications. Of these, Cisse et al. reviewed the modeling approaches of classical SMA constitutive models and their latest advancements21. Hmede et al. summarized the applications of NNs in SMA modeling, particularly how neural network models reveal the fundamental relationships between SMA stress, strain and temperature. They also categorized different SMA forms combined with NNs, highlighting the crucial role of NNs in improving model accuracy and computational efficiency22. Kim et al. assessed the influence of composition, physical form, and scaling effects, alongside a comparative analysis of actuation performance for wire-form, helical, braided, and intelligent soft composite actuators8. Yuan et al. classified SMA-driven rotary actuators, discussing actuation characteristics, heating and cooling systems, actuator control, output torque, and stroke23. Besides, Ruth et al. summarized the structures and control methods of SMA-driven robots which covered applications of soft robots, actuators, servo drives and artificial muscles24.
Despite existing literature, a notable gap persists for a review dedicated to WF-SMA actuators which systematically discusses the key, interdependent domains of modeling, typical configurations, and control strategies. This work aims to address this gap by synthesizing these key domains to provide a valuable reference that offers theoretical guidance for scientific investigation and practical design study. We firstly discuss the mainstream modeling methods for wire SMA actuation with a focus on traditional and intelligent models that have demonstrated superior performances. Then, a classification of WF-SMA actuators based on load characteristics is investigated followed by a detailed analysis of common architectures for large-stroke actuation. Also, we categorize and summarize relevant control algorithms tailored to the characteristics of WF-SMA actuators with emphasis on novel progress in hysteresis compensation, control precision enhancement and self-sensing control. Subsequently, typical applications of WF-SMA actuators in the fields of robotics, aerospace, biomedical engineering, and wearable devices are presented. Finally, we discussed the challenges and opportunities of WF-SMA actuators in current applications and discusses potential research directions.
WF-SMA actuators modeling
Due to the influence of temperature and stress, complex phase transformations occur within SMA among austenite, twinned martensite and detwinned martensite. Figure 2a illustrates the SME cycle (A → B → C → D → A). Initially, the SMA resides in twinned martensite (A). Mechanical loading induces detwinning to detwinned martensite (B), which persists upon unloading (C). Upon heating, the alloy recovers its original form and transforms to austenite (D). Upon cooling, it reverts to twinned martensite (A). Figure 2b illustrates the SE cycle (E → F → E) at T > Af. Initially, the SMA resides in austenite (E). Then loading induces detwinned martensite (F), and upon unloading, it recovers to austenite (E). Figure 2c illustrates the reciprocal actuation cycle (H → I → H) under σ > σf. The SMA starts as detwinned martensite (H), and heating actuates its contraction into austenite (I). Subsequent cooling under load causes elongation, reverting the alloy to detwinned martensite (H). These transformations result in highly nonlinear thermodynamic behavior which poses significant challenges for SMA characteristic modeling. An SMA actuation model that accurately captures the material’s thermodynamic and electrothermal behaviors is crucial for reducing development costs and plays a fundamental role in the design, analysis, and application of the resulting actuators. Since the diameter of the SMA wire is small, the temperature variation along the radial direction can be neglected. This trait allows a one-dimensional (1-D) actuation model to effectively describe the driving performance of the WF-SMA actuators with significantly reduced model complexity.

a Shape memory effect (SME), b Superelasticity (SE), and c actuation and reset process
Macroscopic constitutive models
The constitutive model of stress-strain relationships describes the complex mechanical properties and phase transformation mechanisms of SMAs. SMA constitutive models are often classified into microscopic thermodynamic models, micro-macro models, and macroscopic models21. The microscopic thermodynamic model explains the phase transformation mechanism at the lattice or grain level by describing nucleus formation, interface effects, and martensitic twinning growth24. The micro-macro model describes the mechanical behavior of individual grains based on mesomechanics and then extends it to the entire SMA material25. However, these models involve complex computations and require many microstate variables and parameters that are difficult to measure, obviously limiting their utility in prototype design and analysis. The macroscopic constitutive model primarily describes the macroscopic mechanical behavior of SMA rather than fundamentally revealing the phase transformation mechanism. It involves fewer internal variables and material parameters, allowing for simple and efficient predictions and simulations of various mechanical behaviors such as SME and SE. This modeling strategy can be highly effective for designing and analyzing the macroscopic behavior26. One of the earliest macroscopic constitutive model was formulated by Tanka and Nagaki in 1982, in which the phase transformation variables of SMA were simplified to the martensite volume fraction27. Later, Tanka proposed an exponential phase transformation equation and a 1-D constitutive equation28. Building on this foundation, Lagoudas et al. proposed a three-dimensional (3-D) constitutive model incorporating an exponential phase transformation equation29. To address the limitations of the exponential phase transformation equation in describing volume fraction changes, Liang et al. proposed a cosine-type phase transformation equation30. A potential limitation of these studies was that they do not fully incorporate the influence of stress on the martensite volume fraction. This made it challenging for the resulting models to capture the preferential orientation process of martensite. Brinson, based on Liang et al.‘s work, decomposed the martensite volume fraction into stress-induced martensite volume fraction and temperature-induced martensite volume fraction31. This model enhanced the accuracy and engineering applicability of the constitutive equation, and thus prompted many researchers to create further developments.
For instance, Du et al. simplified the Brinson constitutive model into a piecewise linear model to broaden its application scope32. Zhou et al. incorporated differential scanning calorimetry experiments to account for the effect of phase transformation peak temperature on the SMA phase transformation process33. The model achieved higher accuracy, albeit with greater complexity arising from an increased number of transformation equations. Lu et al. enhanced the description of phase transformation and improved model accuracy. They by introduced a crystal transformation rate coefficient, which captured the effect of transformation speed on the macromechanical properties of SMAs34. Ryu et al. developed a constitutive model based on the Brinson model, explicitly tailored for the analysis of SMA spring actuators35. Kim et al. proposed an enhanced Brinson constitutive model that incorporated martensitic phase transformation kinetics. By adding two additional parameters, this model better described the martensitic transformation process above As36. Auricchio et al. introduced a 1-D model capable of explaining the asymmetry of SMA transformation during tension and compression37. Fahimi et al. improved the Brinson constitutive model by considering the asymmetric behavior of porous SMA beams under tension and compression38. In pursuit of greater precision and better engineering adaptability, He et al. proposed an engineering-oriented SMA constitutive model by incorporating the SMA theoretical tensile curve and temperature-stress phase transformation diagram with more precise formulations for elastic modulus, transformation modulus and critical transformation stress39.
Neural network-based models
Predicting the thermomechanical behavior of SMAs typically involves a combination of approaches, including analytical models formulation, numerical simulations (e.g. finite element method, FEM), and validation against experimental data all of which are contingent upon the SMA constitutive model22. However, traditional constitutive models often struggle to capture the highly nonlinear and path-dependent behaviors of SMAs, which has driven increasing interest in data-driven and machine learning-based modeling approaches. To improve the precision of SMA constitutive models, many studies worldwide have attempted to employ more intelligent techniques. Artificial intelligence (AI) has emerged as a transformative tool in materials science, with efforts concentrated on the prediction of material properties and the accelerated discovery of new materials40. As a key branch of AI, machine learning is well-suited for solving high-dimensional nonlinear problems.
In 2000, Lee et al. proposed a pioneer method based on neural network (NN) to predict the restoring force of SMA springs. Compared to traditional models, the NN-based prediction exhibited higher accuracy, demonstrating the feasibility of NNs in predicting the thermodynamic behavior of SMAs41. Yu et al. studied the stress-strain curves, characteristic stress, dissipated energy, and equivalent damping ratio of SMA wires concerning wire diameter, strain amplitude, loading rate, and number of loading cycles. They proposed a genetic algorithm-optimized backpropagation (BP) NN for nonlinear SMA modeling, wherein the genetic algorithm serves to optimize the initial weights and thresholds of the network’s neurons42. Owusu-Danquah et al. developed a BP NN-based thermodynamic response model to predict the behavior of 55NiTi SMA (49.9% Ni, 50.1% Ti) under stress and thermal cycling conditions43. The model used key factors affecting cyclic behavior as input variables, including temperature, stress, cycle count, and cycle state (heating or cooling). The cycle state was determined by the sign of the temperature increment. The model accurately predicted the temperature-strain response of the SMA under various stress conditions and over hundreds of cycles. These results confirmed the feasibility of using NN-based methods to predict the thermodynamic response of SMAs under complex conditions. Hmede et al. examined several NN architectures for fitting the SE and SME behaviors of SMAs. The study evaluated NNs for their ability to model both single and differential SMA wire systems. While multiple architectures could model the single wire, the results demonstrated that a long short-term memory (LSTM) network with a regression layer was uniquely capable of representing the complex, butterfly-shaped response of the differential system, as quantified by a lower root mean square error (RMSE)44.
Additionally, in parameter identification, Soltani et al. utilized a combination of the Extended Kalman Filter (EKF) and WF-SMA actuator experiments to determine the Brinson model parameters which reduced the time and economic cost of parameter acquisition45. To effectively identify thermodynamic parameters, Lenzen et al. proposed a machine learning-based parameter identification method using a feedforward structure46. For generating the training data, they leveraged a macroscopic SMA constitutive model capable of capturing strain rate-dependent behaviors47. After training, the NN could accurately identified the required model parameters from cyclic tensile stress-strain experiments.
Resistance and electrothermal models
While wire-form actuators are primarily driven by electrical (Joule) heating, a practical actuation model should extend beyond this framework to also characterize the system’s electrothermal properties. This complete characterization is a prerequisite for precise control. During electrical actuation, the length and phase composition of SMA continuously change, leading to variations in its electrical resistance characteristics48. Nahm et al. studied the relationship between resistivity and mechanical properties of NiTi-based SMA under tensile loading and explored its potential as a sensor and achieved a measurement error of 0.22%49. Cui et al. presented a resistance-strain characteristic model for NiTi SMA that correlated the relative change in resistance with strain as a function of temperature. They further proposed a strain sensing principle based on SMA resistance and verified the model’s fine performances through experiments50. Lynch et al. proposed a stress-strain-resistance model that considered various loads and hysteresis effects, and applied normalization processing. The model was evaluated through simulation and experiments, and its correlation with Liang’s enhanced model was studied51. Lu et al. developed a method describing SMA resistance variations based on the crystal transformation rate constitutive model. They investigated the relationship between relative resistance change and strain at 25 °C and 100 °C52. Rodinò et al. developed an experimental system that integrates the measurement of stress, strain, temperature, and electrical resistance to achieve more accurate characterization of the material’s thermomechanical and electrical properties. In addition, they proposed a refined resistivity model that incorporates the effects of temperature and stress, thereby enhancing the precision of resistivity prediction53.
For electrical actuation, the most commonly employed modeling method is based on the energy conservation equation, describing Joule heating, heat capacity, and convective heat transfer54,55. This approach first established the electrothermal relationship between electric current, time, and temperature, and subsequently extended this framework to incorporate the mechanical variables of stress and strain. In the field of SMA actuator actuation modeling, Copaci et al. developed a model to study the actuation characteristics of flexible shape memory alloy actuators56, while Zhang et al. investigated the dynamic response of SMA under various current-driven conditions with typical bias settings57. Ding et al. proposed a hybrid framework that integrates LSTM networks with physical models. This framework utilizes the LSTM network to process voltage-time sequences and predict the temperature and resistance of SMA wires. The approach accurately simulates the thermoelectric response characteristics of SMA actuators, overcoming the complexities of nonlinear behavior and hysteresis effects58. Sgambitterra et al. developed a comprehensive electro-thermo-mechanical model for NiTi SMA wires, which incorporates thermomechanical coupling and latent heat effects to achieve improved predictive precision for temperature evolution and actuation performance under electrical excitation59.
Design principles and configurations
The design and structural configuration of a WF-SMA actuator are fundamentally dependent on the load characteristics of its target application. Linear, nonlinear, and differential systems can be employed to meet the specific requirements of diverse SMA actuators, as illustrated in Fig. 3. In an SMA-linear load system, the actuator works against a restoring force that changes linearly with displacement, a condition met when using a simple bias spring or lifting a constant dead weight (Fig. 3a, b). SMA-nonlinear load systems exhibit nonlinear load changes during actuation (Fig. 3d–f). For the both actuation types, load variation is deterministic, and the response speed mainly depends on cooling conditions and load characteristics. The differential SMA system consists of two or more opposing SMA wires, where selective heating of different SMA wires enables multi-directional actuation, achieving bidirectional or multi-directional movement (Fig. 3g–i). Additionally, since the maximum residual strain of SMA is approximately 8%60, large-stroke SMA systems are a key research focus in the field of SMA actuators to amplify axial displacement within limited axial space.

a Schematic of SMA-linear load system; b biomimetic finger based on SMA-spring system. Reproduced from ref. 63 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); c resettable connection and separation device driven by SMA wire. Reproduced from ref. 68 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); d schematic of SMA-nonlinear load system; e flexible rotary actuator driven by SMA wire. Reproduced from ref. 70 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); f bending soft actuator actuated by biased SMA wire. Reproduced from ref. 74 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); g schematic of differential SMA system; h biomimetic elbow joint driven by differential SMA system. Reproduced from ref. 83 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); i biomimetic ankle joint based on differential SMA artificial muscle matrices. Reproduced from ref. 84 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0)
SMA-linear load systems
SMA-linear load system is among the most common configurations for SMA actuators. In this design, the linear restoring force is typically provided by simple mechanical elements such as weights, bias springs or torsion springs. In gripping mechanisms, Bertetto et al. designed a two degree of freedom SMA-driven gripper by integrating flexible hinges and springs61. This gripper featured two primary actuation modes: parallel actuation and rotational actuation, which could also be combined. Parallel actuation was achieved through a SMA wire and four flexible hinges at the vertex, and rotational actuation was realized by a SMA wire and a spring for enabling reciprocating motion. Pai et al. designed a test tube gripping device based on SMA wire-bias spring system. This design integrated force control, ensuring effective gripping while preventing tube breakage62. Takumi et al. developed a biomimetic finger based on SMA wire-bias spring system, inspired by the flexion and extension principles of the human finger, as shown in Fig. 3b. The biomimetic finger consisted of four phalanges, three finger joints, and an SMA wire-bias spring system63. Each finger joint had one rotational degree of freedom. When SMA was electrically heated and contracted, all joints rotated toward the SMA followed by achieving finger flexion. Once heating stops, the bias spring force caused all joints to rotate in the opposite direction and enabled finger extension. Due to the limited maximum residual strain of SMA, this design utilized the axial space outside the palm instead of achieving effective integration within the palm. Jin et al. proposed an energy-saving device integrated with a two-way shape memory alloy (SMA) spring that autonomously switches between solar heating and radiative cooling modes in response to ambient temperature changes. At high temperatures, the SMA spring elongates, the wing-like structures close, and the device enhances cooling efficiency; at low temperatures, the spring contracts, the wings open, and solar energy absorption increases64.
In connection and separation devices, Vázquez et al. developed a segmented-nut connection and separation device based on SMA-spring system. When the SMA wire was electrically activated, it overcomed the elastic forces of the spring and torsion spring, as well as the friction within the system This may cause the wheel to rotate and releasing the split nut, and thereby achieved unlocking state. To ensure reliable separation, this design incorporated two SMA wires connected to different circuits for redundant actuation65. Yoo et al. developed a two-stage ball-lock connection and separation device based on SMA-spring system. When the SMA wire was electrically driven, it released the first-stage roller. Once the first-stage roller was released, the compression spring pushed the locking sleeve, which then released the second-stage roller to achieve unlocking66. Zhang et al. developed a novel resettable connection and separation device based on two sets of SMA-spring systems67. Provided the actuation SMA wire was triggered, it overcomed the elastic force of the safety spring and obtained unlocking. When the reset SMA wire was triggered, it overcomed the elastic force of the locking spring, achieving relocking. Yang et al. proposed a high-load, low-impact rotary connection and separation device, as shown in Fig. 3c. The device was driven by an SMA wire-biased spring system that actuates a trigger shaft to achieve rapid unlocking. Upon activation, the SMA wire pulls the trigger shaft to make it rotate. This rotation released the constraint on the non-self-locking nut and eventually enabled low-impact load release68.
SMA-nonlinear load systems
The growing requirement for lighter, more compact and efficient SMA actuators has led to innovative designs that embed the wires within advanced structural concepts, including flexible mechanisms, soft robotic materials, and origami- or textile-based systems. These designs often experience nonlinear load conditions. In combination with flexible structures, Lan et al. developed an SMA wire-driven flexible rotary manipulator. In the design, SMA wire is wound around three key force points on the flexible sheet. When heating the SMA wire, it became contracted which generated three equal counterclockwise tensile forces at the key force points. These forces overcomed the nonlinear resistance of the flexible structure, enabling rotational actuation69. Zhou et al. designed an SMA wire-driven flexible rotary mechanism by integrating a spring-blade pivot, as shown in Fig. 3e. When the SMA wire was electrically heated, it rotated the output shaft resulting in deformation in the spring-leaf pivot blades. Once the power was turned off, the elastic force of the blades reset the pivot mechanism, and enabled reciprocating motion. This mechanism utilized fixed pulleys to guide six SMA wires, maximizing the actuation displacement within a limited axial space70. Then et al. designed an SMA-driven monolithic flexible gripper, whose tip can achieve translational motion which made it suitable for micromanipulation and micro-assembly tasks71. Its motion mechanism was primarily based on the interaction between nonlinear connections and SMA wires.
This gripper structure exhibited a 3.7-fold displacement amplification effect, with a maximum tip displacement of 12 mm. Lim et al. developed an embedded five degrees of freedom (DOF) sensor system by integrating SMA wires into a flexible mechanism. The system featured a compact and lightweight multi-layer structure which incorporates a 3-DOF force/torque sensor and a 2-DOF magnetic displacement sensor. Linear and helical SMA actuators drove the device to produce vertical pressure and in-plane shear motion, while the flexible mechanism ensured accurate motion transmission72.
In combination with flexible materials, Rodrigue et al. designed a bending soft actuator module driven by a biased SMA wire. This actuator can achieve a maximum bending angle of 180°, and when three modules work together, they can generate a total tensile force of 30N73. The actuator module consisted of a biased SMA wire, soft matrix material layers on both sides (polydimethylsiloxane, PDMS), and a central fiberglass layer. The SMA wire drove the bending deformation of the soft structure. The matrix material supported the deformation of the SMA wire while maintaining its shape. The fiberglass layer enhanced the structural rigidity of the actuator and prevents shrinkage deformation of the PDMS material. Similarly, Lee et al. designed an SMA wire-biased driven soft gripper module by integrating a soft matrix, with its structure shown in Fig. 3f74. This design utilized biased SMA wires that were freely slidable to drive the soft matrix, effectively decoupling the SMA wire length from the matrix length, which increased the bending angle and gripping force, significantly enhancing the performance of the SMA soft actuator. Actuated by an SMA wire with maximum length of 350 mm, the module can achieve a maximum bending angle of 400°, with a corresponding end force of 0.89 N. Lan et al. developed a two-finger gripping structure by combining SMA wires with a flexible structure and proposed a structural parameter optimization method based on an SMA-driven finger model, ensuring excellent actuation performance and rigidity for the gripper75.
Another typical field is crawling robots. Huang et al. embedded SMA wires into a flexible elastomer to design an untethered soft robot. This design specifically utilizes the bending moment induced by the SMA wires (rather than tensile forces) to actuate the robot’s joints, which enables multiple locomotion modes, including quadrupedal walking and caterpillar-inspired crawling76. Che et al. employed SMA wires trained into specific shapes as the exoskeleton of the robot, which are actuated by arc-heating. This design enables the microrobot to achieve active morphing, self-recovery, and environmental adaptability under thermal stimuli. The microrobot is capable of rapidly switching between different morphological states, including compressing its body to traverse narrow gaps, recovering its original shape after being subjected to large external forces, and transitioning between terrestrial and aquatic environments77.
Furthermore, flexible weaving techniques have opened avenues for the design of SMA-based wearable devices. Serrano et al. designed an SMA-driven flexible exoskeleton glove, in which multiple integrated SMA actuators were flexibly arranged on both sides of the glove which enabled hand extension and flexion by driving the actuators on the back and palm78. Each integrated SMA actuator consists of an SMA wire, a polytetrafluoroethylene (PTFE) layer, an outer protective layer, and fixed terminals. The PTFE layer provided thermal insulation. This flexible woven design introduced a new approach to the development of SMA-driven wearable devices. Granberry et al. utilized textile fabrication techniques to produce flexible and stretchable active textile structures from SMA wires79. This structure combined NiTi shape memory alloy wires in series with passive elastic fabrics to form an antagonistic configuration. Upon heating, the SMA wires actuated the fabric to contract, enabling close-fitting dynamic pressure regulation. This approach provided an efficient and stable wearable dynamic compression solution suitable for medical and aerospace applications. Liu et al. developed a flexible high-pressure sensor by employing double-braided SMA wires, achieving high strength, excellent flexibility, and a near-linear electromechanical response. The sensor maintains superior flexibility, high strength, and excellent recoverability under large reversible strain (up to 8%) and high stress (approximately 600 MPa). Furthermore, it can be woven into sensor arrays, enabling sensitive detection of pressure distribution on complex curved surfaces80.
Differential SMA systems
Differential SMA schemes enable robust bidirectional actuation by employing two or more wires, often in an antagonistic arrangement, to achieve faster and more efficient reciprocating motion. Wiest et al. developed a flexible beam system based on differential SMA modules81. Each differential SMA module consisted of two SMA wires, a primary flexible beam, and clamping blocks at both ends. By selectively heating and contracting the two antagonistic SMA wires, the system generated positive and negative bending moments. This enabled the flexible beam system to bend at various angles. Inspired by the human elbow joint, Guo et al. designed a flexible bionic joint based on a differential SMA system82. This bionic joint adopted two SMA wires to simulate the contraction of the biceps and triceps, working in combination with a torsion spring to achieve bidirectional rotation. By reducing the overall stiffness, this design enhanced the actuator’s response speed while expanding its rotational range. Also inspired by the human elbow joint, Zhu et al. developed another bionic joint, incorporating a differential SMA system and differential pulleys as shown in Fig. 3h83. This joint leveraged two sets of SMA wires to simulate the contraction of the biceps and triceps which enabled bidirectional rotation. The integration of a differential fixed pulley system increased the axial actuation stroke of the SMA wires within a limited space and achieved a maximum joint rotation of ±30°. Compared to traditional differential SMA systems, both of these bionic joint designs effectively amplified the SMA actuation displacement within a restricted axial space but at the cost of some reduction in SMA wire actuation force. Drawing inspiration from the human ankle, Jia et al. proposed a bionic mechanical ankle joint with an artificial muscle matrix, shown in Fig. 3i84. Two groups of artificial muscle matrices replicated the muscles on both sides of the ankle, enabling bidirectional movement. Each muscle matrix comprised multiple SMA wires and Ecoflex 00-30 silicone. The SMA wires provided both driving force and displacement. The number of wires and their diameters together determined the actuator’s performance. The silicone material evenly distributed the stress generated by the wires which prevented any single wire from overloading and also aided wire recovery during cooling.
Beyond utilizing two sets of differential SMA wires for bidirectional actuation, some studies have employed three or more sets of SMA wires to obtain more complex planar or spatial motion. Karimi et al. designed a 3-D steerable active flexible needle driven by a differential SMA wire system for percutaneous needle-based interventional therapy. By coordinating the activation of the three SMA wire actuators, the needle acquired highly flexible 3D spatial steering85.
Large-stroke SMA systems
To amplify the actuation stroke of SMA wires within a limited space, many efforts have been conducted in the field of large-stroke actuators. The primary stroke amplification designs can be further categorized into three types: curvilinear layout, modular design, and multi-pulley system. In the miniature unlocking device field, to meet the requirements for miniaturization and compactness, a curvilinear layout design is often adopted to increase the effective stroke of SMA wires in confined spaces. Following this rules, Yang et al. and Pan et al. designed an SMA-driven low-impact heavy-duty flywheel nut release mechanism as shown in Fig. 4b86. In the actuator design, the mechanism utilized the internal redundant space of the device, and integrated a pulley structure with a winding layout to increase the effective actuation stroke of SMA wires. Similarly, Yan et al. and Zhang et al. incorporated insulated pulleys and other structures into SMA actuators, which extended the SMA wire’s actuation stroke while reducing friction loss87,88.

a SMA rotary actuator based on a modular rotating wheel system. Reproduced from ref. 90 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); b SMA wire actuator with a curvilinear layout. Reproduced from ref. 86 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); c SMA wire actuator employing a movable pulley block. Reproduced from ref. 91 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); d SMA wire actuator utilizing a fixed pulley block. Reproduced from ref. 92 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0)
By employing modular design principle, Lu et al. developed a large-stroke SMA linear actuator incorporating a modular sliding rail design. This actuator was applied to a grasping mechanism which significantly expanded its gripping range89. By this means, the actuator got large-stroke linear actuation by accumulating displacement through multiple sliding rail modules. Similarly, Britz et al. designed a large-stroke SMA wire-based rotary actuator by integrating a modular rotating wheel design, as shown in Fig. 4a90. This actuator achieved large-angle rotational actuation by accumulating rotation through multiple rotating wheel modules. Both of these modular-based designs provided the advantage of scalability, allowing for the customization of actuator stroke lengths by adjusting the number of modules as specific application needed. Nevertheless, the radial dimension of the actuator was sensitively dependent on the number of modules, thereby hindering efforts toward miniaturization.
Based on multi-pulley system design, Wang et al. developed an SMA-driven robotic finger utilizing a multi-pulley system, as shown in Fig. 4c91. In this design, two pulleys in the upper section were fixed, while three pulleys in the lower section were connected to the SMA wire in a floating state. PE wire was sequentially wound around the pulley system. Upon actuation, the contraction of the SMA wire displaced the entire lower pulley assembly downward. This arrangement amplified the output at the PE wire’s end, yielding a displacement six times greater than the SMA wire’s contraction. However, this gain in displacement necessitated a trade-off, reducing the output force to one-sixth of the driving force from the SMA wire. Another method for increasing the displacement of SMA wire actuators involved winding a long SMA wire around multiple fixed pulleys within a confined space as shown in Fig. 4d92. The design adopted three sets of fixed pulleys to wrap the SMA wire actuator. It enabled robotic hand actuation while significantly extending the effective SMA wire length within a limited axial space, thereby enhancing the overall actuation displacement.
In parallel, SMA springs can be regarded as a large-stroke variant of 1-D SMA actuators93. Qin et al. proposed a biomimetic soft climbing robot, which achieves bending and movement at different positions through multiple SMA springs. By mimicking the climbing process of Parthenocissus, the robot can move flexibly on complex and discontinuous surfaces. After completing its task, the robot can fully contract, preventing any damage to the environment94. Compared to conventional SMA wires, SMA springs offered greater actuation displacement but generated lower driving force and had a slower response speed. Their layout flexibility was relatively limited. Therefore, SMA springs may be suitable for applications requiring large strokes, light loads, and sufficient space, such as flexible grippers, shock absorbers, and soft robotic actuators.
Control strategies
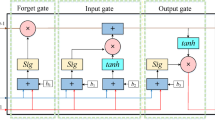
While SMA-based actuators can offer notable advantages such as a superior force-to-weight ratio and structural simplicity, their inherent nonlinearity, hysteresis and parameter uncertainty pose significant challenges to achieving precise motion control81. To enable the system to reach the desired state rapidly and stably without overshoot or oscillation, and to ensure robustness against external disturbances, extensive research has been conducted in the field of SMA wire actuator control. The typical control block diagrams, classifications of control techniques, and their respective characteristics are illustrated in Fig. 5.

a Typical control block diagram of WF-SMA actuators. The framework comprises two pathways-feedforward compensation and feedback control (including displacement feedback and self-sensing feedback). Model-based and neural-network-based control techniques can be employed within the feedforward, controller, and feedback-loop modules to enhance overall system performance. b Classification and key characteristics of SMA actuation control techniques. Considering the attributes of each technique, individual control strategies can be combined appropriately to meet specific control requirements
Traditional control
Proportional-integral-derivative (PID) controller, a cornerstone of classical control theory, has been extensively applied to SMA actuators. Kalra et al. employed PID control for SMA wires to regulate the surface shape of space-based intelligent parabolic structures55. Zhu et al. implemented saturated PI control to regulate the rotation angle of bio-inspired joints83. Abdullah et al. applied PID control to SMA wires for variable deflection control of fiberglass composite plates95. Based on traditional PID control, various PID-based variants have been adopted to address SMA nonlinearity and hysteresis in position control. Shi et al. introduced an adaptive PI control scheme for robotic hand joint rotation by integrating a gray-box model to address these limitation. They further proposed adaptive control techniques for dynamic parameter adjustment, thereby enhancing the system’s robustness and accuracy92. Villoslada et al. developed a Bilinear PID (BPID) controller for position control of SMA actuators96. The BPID controller introduced a bilinear term and an associated compensator to approximate the nonlinear system as linear. This approach effectively reduced hysteresis and nonlinearity in SMA control. Compared to the classical PID controller, the BPID controller achieved better control performance, though at the cost of slightly higher power consumption. Additionally, Serrano et al. leveraged BPID control to SMA-driven rehabilitation exoskeletons for dual-degree-of-freedom wrist rotation control and SMA-driven flexible exoskeleton gloves for displacement78,97. Rooted from fuzzy PID control theory, Kha et al. proposed a self-tuning fuzzy PID controller for position control of SMA actuators. The presented control method employed fuzzy inference to optimize PID controller parameters, thereby enhancing control performance in nonlinear systems98. Shi et al. developed a self-sensing-based fuzzy PID controller for angle control of a 2-DOF SMA-driven joint. The step response experiment verified the controller’s accuracy and obtained an average absolute rotation error of approximately 5.24%99. Similarly, Hu et al. applied a fuzzy PID controller for force control in an SMA-spring system100. Maffiodo et al. proposed and compared PWM-modulated PD control, fuzzy logic control, and PWM-modulated fuzzy PD control. The study demonstrated that PWM-modulated fuzzy PD control was simpler, more practical and exhibited the least fluctuation101.
Additionally, Alsayed et al. introduced a hybrid sliding mode fuzzy logic PI controller for performing modeling and simulations of an SMA-constant load actuator system’s dynamic response. Simulation results confirmed that this control approach effectively eliminated overshoot and steady-state errors in reference tracking and step change scenarios102. Subsequently, Alsayed et al. proposed an improved model implementation method and designed a fuzzy PI controller with adaptive capabilities, which demonstrated excellent performance in reducing steady-state error, minimizing overshoot, and compensating for hysteresis103.
SMA model-based control
While traditional controllers are easy to implement, their empirical nature restricts performance under nonlinear and hysteretic conditions. To overcome these issues, model-based control approaches have been developed. Accurate characterization of SMA actuator performance is theoretically underpinned by the development of sophisticated constitutive, resistance and thermodynamic models. A major approach to SMA actuator control involves developing controllers rooted in physics-based or mechanistic models of the actuator’s behavior.
Sliding mode control (SMC) is a widely used nonlinear control method that ensures the system state slides along a predefined sliding surface. Due to its strong robustness in handling uncertainty, external disturbances, and model inaccuracies, SMC is frequently applied in nonlinear control systems driven by SMA actuators. The key to applying SMC in SMA actuator control systems lies in effectively defining the sliding surface based on the SMA actuator model. Elahinia et al. applied SMC to the angular control of a single-DOF SMA rotary manipulator using a physics-based SMA model. The model defined the system dynamics and state variations, enabling the design of an optimized sliding surface and switching law. The controller achieved fast response, small steady-state error, and strong disturbance rejection104. Ashrafiuon et al. proposed a similar study to control the pose of a three-degree-of-freedom robotic arm driven by SMA105. Romano et al. further extended this approach by upgrading the first-order sliding surface to a second-order sliding surface. The position error, velocity error, and acceleration error to further enhance system dynamic performance were thoroughly investigated. Their control system incorporated a cooling system which enabled a faster response when combined with SMC control106. Keshtkar proposed penalty SMC for the attitude control of an underactuated flexible beam system driven by SMA107. The method introduced a penalty term to smoothen the SMC, prevented high-frequency chattering upon reaching the sliding surface and thereby improved control system stability and robustness. Similarly, Pai et al. proposed a control method that combined nonlinear PID controllers with variable structure control (VSC) to achieve precise force control in an SMA-driven test tube gripping mechanism62. Their system demonstrated excellent control performance under step force changes, sinusoidal tracking, and load disturbances. In this method, the nonlinear PID controller used temperature as a feedback signal, and by computing the inverse model of the SMA constitutive model, it provided a rough position control. VSC adapted to dynamic load variations and prevented overheating, ensuring precise force control and system stability.
Another model-assisted control approach utilizes constitutive models or hysteresis models to compensate for hysteresis effects which is able to eliminate the nonlinearities caused by SMA. Nguyen et al. combined the feedforward of fuzzy-based inverse Preisach model with PID. The fuzzy-based inverse Preisach model feedforward was used to compensate for hysteresis nonlinearities, while the PID feedback adjusts the error between the system output and the desired output108. Similarly, Zakerzadeh et al. proposed a control method combining the feedforward of inverse hysteresis model and PI to control the tip deflection of a large-deformation flexible beam driven by a SMA wire109. The feedforward part of this control system was based on the inverse of the Prandtl–Ishlinskii model, which established the relationship between the tip deflection of the flexible beam and the SMA temperature to obtain the driving current. Experimental results indicated that this controller provided high positional tracking accuracy and strong robustness against environmental disturbances. Li et al. proposed a controller based on an inverse hysteresis model. The model was derived from experimental data and used to calculate the input voltage, effectively reducing hysteresis effects110.
Neural network-based control
Although model-based control enhances accuracy and handles nonlinearities, it remains constrained by model fidelity and complexity. Consequently, data-driven neural network control has gained increasing attention. The inherent adaptability and flexible structure of these models make them particularly well-suited for the complex dynamics of SMA actuators. A common method for improving control accuracy using NN is SMC. Tai et al. proposed a radial basis function (RBF) neural network SMC method111. In this case, the RBF-NN was employed to approximate the sliding mode equivalent control signal, and the centers and output weights of the RBF-NN were updated through online learning to adapt to system parameter uncertainties. In experiments involving the SMA-biased spring system tracking sine waves, multi-triangular waves and multi-step signals, the controller demonstrated high-precision position tracking capability which effectively compensated for the hysteresis behavior of the SMA. Tai et al. further added linearization methods and Kalman filters to this controller to eliminate output measurement noise which improved the system’s control accuracy112. Similarly, Nikdel et al. proposed a neural network model predictive control (NN-MPC) method and implemented it to the angle control of a SMA actuated single-DOF rotary manipulator113. The controller utilized NNs to capture the dynamic behavior of the SMA-driven system, predicted the behavior of the SMA actuator and makes control decisions. It simultaneously used real-time position feedback to adjust the control signals to improve the system accuracy and stability. Wiest et al. proposed an indirect intelligent SMC method that combined hysteretic recurrent neural network (HRNN) compensation and an antislack mechanism to achieve position control of differential SMA wire systems81. The HRNN was capable of compensating for SMA hysteresis behavior, while the antislack mechanism actively heated inactive tendons to maintain tendon tension and improved system response speed. Li et al. proposed a hybrid control strategy combining inverse empirical hysteresis model and sliding mode-radial basis function (SMC-RBF) compensation110. The inverse empirical hysteresis model was used to reduce hysteresis effects, while SMC-RBF estimated and compensated for dynamic errors and external disturbances between the inverse model and actual hysteresis. Experimental results demonstrated that this method achieves minimal overshoot and steady-state error in step, square wave, and sine reference signal tracking tests which significantly enhanced response speed and tracking accuracy.
Another approach to improving control accuracy using NNs is feedforward compensation control. Asua et al. proposed a neural network–based hysteresis compensation method combined with an anti-windup PI controller for precise position control of an SMA wire–load system. The neural network learned the hysteresis behavior of the SMA to generate the control current compensation. Training data were obtained from thermodynamic responses under sinusoidal currents of varying amplitudes and frequencies. To identify whether the SMA was on the ascending or descending branch of the hysteresis loop, the network input included the current position (yk) and the two preceding positions (yk-1, yk-2)114. Son et al. proposed an adaptive displacement online control method based on NNs and hybrid differential evolution (HDE) algorithms115. The method combined an adaptive feedforward neural network (AFNN) model with a PID controller to achieve precise position control of the SMA spring-biased spring system. AFNN was used to identify the hysteresis inverse model of the SMA actuator, and the HDE algorithm optimized the weights of the AFNN model which provided efficient and accurate online control signals for the SMA actuator. Senthilkumar et al. combined gain-modulated PI control and load-displacement relationship NN model to control the position of SMA actuator which selected load as a feedback signal, and the control accuracy was comparable to displacement feedback control116. A key innovation of this strategy was its use of a NN model to estimate the SMA wire’s end-point position from load data, thereby circumventing the challenges of direct measurement. By modeling the relationship between load and displacement, the system became highly effective in situations where displacement sensors were impractical or where the process of measuring resistance significantly perturbs the wire’s actuation.
Beyond deep learning, reinforcement learning (RL) has also attracted attention in SMA control. RL focuses on optimizing decision-making through agent-environment interaction which facilitates autonomous learning and continuous improvements in unknown environments117. Liu et al. proposed a deep RL method to achieve optimal displacement tracking which addressed the challenge of high-performance tracking in an SMA-driven system with completely unknown dynamics. Using the prescribed performance control (PPC) concept, a prescribed performance function and corresponding error transformation were designed to convert constrained tracking errors into unconstrained errors. Then, the Actor-Critic RL method was applied to iteratively solve the Hamilton-Jacobi-Bellman equation. This approach balanced tracking errors and control input costs without relying on a system model and ensured closed-loop system stability through Lyapunov theory118,119. Liu et al. proposed an adaptive simulated annealing Q-Learning (ASA-Q-learning) controller for controlling humanoid robotic fingers. Experimental comparisons between the ASA-Q-learning controller, SA-Q-learning controller and PID controller confirmed that the ASA-Q-learning controller can achieve faster convergence speed and higher control accuracy120.
Self-sensing control
In addition to the development of control algorithms, considerable efforts have also been devoted to enhancing feedback mechanisms. Since the resistance of WF-SMAs change significantly during phase transformation, many studies adopt resistance as a feedback signal to control SMA actuators, a method known as self-sensing control. This approach establishes a mapping relationship between resistance and displacement (or force), and enables the characterization of SMA actuator displacement (or driving force) through resistance measurement. Given the complex and nonlinear correlation between resistance and displacement, the critical task lies in enhancing the accuracy of the self-sensing models designed to capture this relationship.
Based on polynomial fitting, Lan et al. proposed a resistance self-sensing fuzzy-tuned PID control method. They studied the relationships between strain-resistance and force-resistance, and employed polynomial fitting to effectively construct a self-sensing resistance model121. Similarly, Karimi conducted experiments to mathematically characterize the driving strain, resistance, and driving current of SMA actuators. They designed a self-sensing control system for tracking the end position of a flexible needle. Experimental results demonstrated that the method could accurately guide the needle’s tip to reach the target point within a planar workspace of approximately 20mm85. As the most straightforward method for characterizing the resistance-displacement relationship, polynomial fitting has been widely adopted by researchers to implement self-sensing control in various actuator systems122,123,124.
In terms of neural network modeling, Hari et al. proposed a self-sensing physics-inspired model based on deep NNs which enabled displacement estimation without external position sensors. The model mapped heat conduction, phase transformation and mechanical properties of the SMA actuator onto three network layers. The first and last layers adopted LSTM networks to capture dynamic temporal characteristics, while the middle layer used a feedforward neural network to perform static mapping. Compared to the traditional two-layer LSTM model, the proposed model delivered enhanced predictive performance. While achieving greater overall accuracy and robustness, its key strength was the precise capture of peak displacement during motion reversal, a point of failure for the conventional model125. Pei et al. developed multiple self-sensing models using backpropagation NNs and LSTM networks to realize self-sensing measurements of displacement, force, and stiffness based on the resistance variation of SMA wires126.
To enable a self-sensing differential control scheme, Ruth et al. proposed a specialized signal conditioning circuit (SSC) designed to perform both the actuation of the system and the requisite differential resistance measurements127. Shi et al. introduced a control method based on SMA resistance self-sensing feedback, which combined the shape memory effect and superelastic effect of SMA to achieve actuation and sensing128. In one configuration, the superelastic SMA wires (SSMA) served both as bias and sensors, while the SMA wires acted as actuators. For the other configuration, two SMA wires served as actuators, and two opposing superelastic SMA wires served as sensors. Furthermore, to improve control precision, a neural network was utilized to compensate for nonlinearities in the strain-resistance relationship of the SMA wires.
Applications of WF-SMA actuators
WF-SMA actuators, characterized by high power density, low energy consumption, large deformation capacity, and superior flexibility integration, have seen numerous successful implementations in robotics, aerospace, biomedicine and wearable technologies (Fig. 6). By revisiting key applications in each field, this section identifies and analyzes the associated implementation challenges. Ultimately, this review seeks to offer forward-thinking perspectives and propose effective strategies to guide future engineering practices.

a Soft robotic gripper actuated by SMA wires. Reproduced from ref. 73 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); b SMA-based micro-hand implemented in small robot. Reproduced from ref. 63 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); c morphing wing mechanism using an SMA wire actuator. Reproduced from ref. 133 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); d Bi-direction and flexible multi-mode morphing wing based on antagonistic SMA wire actuators. Reproduced from ref. 134 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); e cardiac support device actuated by SMA wires. Reproduced from ref. 139 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); f Suit-type wearable robot actuated by SMA springs. Reproduced from ref. 144 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); g superior vena cava compressing SMA-based implantable device. Reproduced from ref. 142 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); h SMA-based astronaut compression device using active textiles. Reproduced from ref. 79 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0); and i SMA-based soft Exo-glove. Reproduced from ref. 78 under the terms of the Creative Commons Attribution 4.0 International license (CC-BY 4.0)
Typical applications
In the robotics domain
WF-SMA actuators, with the advantages of a simple activation mechanism, flexible integration, and noise- and pollution-free operation, are ideal actuators for robotic systems. Typical applications include soft and compliant robotics, robotic joints and actuators, and precision micro-scale robotics. Soft and compliant robotics employ SMA wires embedded within elastomeric or textile substrates to achieve multi-DOF motions including bending, grasping, and surface deformation. This integration enhances the adaptability of the robots, enabling them to perform effectively in complex environments73,129. Robotic joints and actuators commonly employ antagonistic arrangements of SMA wires paired with elastic elements or flexible structures. Such configurations efficiently drive end-effectors to perform actions including extension and contraction, while also replicating the flexible rotation of biological joints63,82. Precision micro-scale robotics, such as SMA-based micro crawlers, micromanipulators, and thrusters, offer micrometer-level displacement precision and high integration density. These capabilities have enabled innovations in pipeline inspection, microsurgery, and micro-environment propulsion130,131.
In the aerospace domain
WF-SMA actuators possess notable advantages, including low mass and compact structure, which enable them to effectively meet the stringent requirements of the aerospace applications for lightweight, miniaturized actuators with low vibration and low-voltage operation132. In morphing aircraft, SMA-based morphing mechanisms can actuate wingtip deflection, telescoping wing extension and tailplane twist, thereby dynamically modifying local aerodynamic sectional profiles and load distributions. These capabilities offer multifaceted performance gains, including facilitating fluid flight mode transitions, markedly increasing the lift-to-drag ratio, and bolstering both attitude stability and fuel conservation133,134. For microscale biomimetic aerial vehicles, SMA wires replicate the tendon-muscle system of living organisms to actuate wing flapping. This design yields near-silent operation and a low radar cross-section, making these vehicles well suited for stealth reconnaissance missions135. For connection and separation mechanisms, WF-SMA actuators are extensively utilized in deployment and separation systems for foldable antennas and solar arrays, multi-stage rocket separation, satellite module assembly and space station docking. They offer low-shock, high-reliability and reusable solutions for in-orbit release and reattachment operations136.
In the biomedicine domain
SMAs combine excellent physicochemical properties with biocompatibility, and exhibit tendon-like elastic properties. This unique combination of attributes makes them exceptionally well-suited for driving biomedical systems in both in vitro and in vivo applications. For implantable applications, SMA-based micro-pumps and expandable stents can facilitate precise drug delivery and provide luminal support137,138. SMA-based cardiac support devices typically comprise multiple SMA wires arranged circumferentially or in parallel around the epicardial surface. Upon heating, these wires contract rapidly during early systole to assist ventricular ejection and relax upon cooling to facilitate diastolic filling. By synchronizing actuation with each cardiac cycle, the device significantly enhanced cardiac output139.
In minimally invasive surgical instrumentation, SMA-actuated continuum robots and intelligent catheters enabled multi-degree-of-freedom bending, rotational articulation, and on-demand drug delivery. These innovations offered advanced solutions for surgical procedures and precision therapeutics140,141. The capabilities of SMA wires were further highlighted by their ability to achieve precise deflection of catheter tips, actuate the jaws of micro-forceps, and effect the rapid compression and release cycles essential for vascular closure devices85,142. In rehabilitation and wearable technologies, WF-SMA actuators have been integrated into assistive gloves, exoskeletons, and compression garments for muscle re-education and joint rehabilitation.
In the wearable technologies domain
Portable wearable devices based on SMAs achieve lightweight design while delivering sufficient driving force. The excellent flexibility integration of SMA wires allows seamless coupling between actuators and compliant substrates, greatly enhancing both the design freedom and user comfort of wearable devices. SMA-based actuators have been widely adopted in compression garments, assistive gloves and exoskeletons. In compression garments, the contraction of SMA wires generated adjustable circumferential pressure to support muscle function and promote blood flow, with applications ranging from astronaut anti-G compression suits to sports rehabilitation garments79. In assistive gloves, embedding SMA wires along the finger segments achieved biomimetic flexion–extension motions, which provided precise grasp assistance for stroke survivors and patients with muscle weakness78,143. In Exoskeletons, SMA actuation units delivered dynamic assistance calibrated to the user’s movement patterns, making them suitable for industrial lifting and gait rehabilitation tasks144.
As demonstrated across the domains of robotics, aerospace, biomedicine and wearable technologies, WF-SMA actuators consistently provide solutions where lightweight, compact, and silent actuation is paramount. Beyond representative fields, the distinct properties of SMAs have also driven innovation in numerous other sectors. Notable applications can be found in the automotive industry for adaptive components and thermal management. Civil engineering can employ them for structural damping and control. Additionally, consumer electronics utilize them to create haptic feedback and precision mechanisms. This broad applicability underscores the versatility of WF-SMA technology and points towards its continued integration into a diverse range of future engineering systems.
Implementation challenges and near-term prospects
Despite the extensive application potential of WF-SMA actuators across various fields, their practical deployment continues to face a range of common and domain-specific technical challenges. These challenges necessitate systematic breakthroughs to fully realize their capabilities. From a common perspective, WF-SMA actuators generally face challenges in thermal management, fatigue degradation, control precision, sensing capability and commercialization. SMA actuation relies on thermal cycling, and the heat accumulation and inefficient dissipation restrict the response speed of SMAs, hindering their ability to meet high-frequency dynamic operation demands. To address thermal management challenges, future efforts may focus on designing efficient microchannel cooling systems, employing high thermal conductivity composites, and optimizing structural layouts145,146. These measures facilitate rapid heat exchange and dissipation, thereby enhancing response speed and enabling continuous operation. Moreover, thermal cycling causes a reduction in the driving force and deformation capacity of SMAs, resulting in fatigue degradation. This significantly undermines the long-term stability and reliability of WF-SMA actuators. To mitigate this issue, strategies such as optimizing alloy composition, introducing nanostructural reinforcement, employing multi-material composites, and applying advanced heat treatments can be utilized to enhance fatigue resistance and extend service life147. In addition, the nonlinear constitutive behavior and hysteresis of SMAs limit the real-time responsiveness and control accuracy. These limitations impair the stable operation of actuators in complex environments. Future research should focus on integrating model predictive control, machine learning algorithms, and advanced sensing technologies to develop precise, adaptive closed-loop control systems. Furthermore, the sensing technology of WF-SMA actuators still exhibits limitations in real-time state monitoring. By integrating nanoscale sensors, micro-nano fabrication techniques, and flexible electronics, sensitive multiphysics sensing systems can be developed to enhance sensing capability. Recent advances such as sacrificial layer-assisted nanoscale transfer printing enabling high-fidelity nanostructure integration148, super-stretchable CNT-based capacitive strain sensors for wearable and soft robotics149, and versatile soap bubble transfer printing for curved and complex substrates150 provide powerful fabrication strategies to embed multifunctional electronics into WF-SMA actuators. Moreover, the incorporation of self-healing polymers offers potential for multifunctional actuators with intrinsic self-sensing and self-repair capabilities151,152. These advancements enable real-time monitoring and autonomous damage repair, significantly improving system reliability and longevity. Regarding commercialization, WF-SMA actuators face high fabrication costs, complex manufacturing processes, and insufficient standardized testing and evaluation protocols, which hinder standardized, large-scale, and cost-effective production. Therefore, it is necessary to establish unified performance testing standards and promote modular, automated manufacturing. These measures aim to reduce costs while enhancing product consistency and reliability.
From a domain-specific perspective, robotics demands actuators capable of rapid response and precise multi-channel coordinated control due to the complexity of high-dynamic, multi-DOF motion. The use of multivariable control algorithms combined with distributed sensor networks enables real-time multi-channel synchronous control, improving motion coordination and response speed. Moreover, the interfacial bonding strength and durability of multi-material composite structures require enhancement to ensure the long-term stability of soft and compliant robots. Future research may focus on novel interfacial adhesives and structural designs to improve the mechanical strength and fatigue resistance of these structures. In the aerospace domain, the application of SMA actuators under extreme temperatures and vacuum conditions remains insufficiently explored. Additionally, long-term on-orbit operation, sometimes exceeding 20 years, exacerbates mechanical fatigue degradation. Therefore, it is necessary to develop SMA materials and protective coatings with high-temperature resistance, environmental durability, and enhanced longevity. Accelerated aging tests should also be conducted to ensure the long-term stability and reliability of actuators in space environments. In the biomedical domain, implanted devices require stringent biocompatibility and safety standards. Consequently, the incorporation of biologically inert coatings and anti-inflammatory materials, combined with surface functionalization, is essential to enhance the safety profile of implanted devices. Additionally, heating mechanisms pose risks of thermal damage to surrounding tissues. Therefore, the development of low-power, rapid heating methods and precise temperature control, coupled with thermal insulation materials, is imperative to mitigate thermal impacts on biological tissues. In the wearable technologies domain, the flexibility and comfort of actuators require further optimization to accommodate the complex motion patterns of different parts of the human body. Flexible components based on fiber-reinforced composites may contribute to improved compliance and durability. The balance between lightweight design and driving force remains a technical challenge. By integrating multi-scale structural design with intelligent control strategies, an optimal balance between performance and weight reduction can be achieved.
Overall, future efforts may focus on the synergistic advancement of material innovation, structural design, advanced fabrication techniques, intelligent control, and system integration. Overcoming existing bottlenecks through these multidisciplinary approaches is essential to promote the high-performance development of these technologies across multiple fields.
Discussion
Based on the current state of development, it is evident that research into WF-SMA actuators has made significant strides, laying a strong foundation for future applications. This section discusses the main topics of WF-SMA actuators, specifically focusing on the characteristics and limitations of key modeling techniques, representative design configurations, and typical control methods. Additionally, it will provide a forward-looking technological outlook.
Technologies: characteristics and limitations
Modeling
WF-SMA actuation models form the theoretical foundation for the effective design and precise control of WF-SMA actuators. The key modeling techniques currently employed include macroscopic constitutive models, neural network-based models, and resistance and electrothermal models. The macroscopic constitutive model simplifies phase transformation description variables, reducing model complexity and facilitating parameterized design and simulation analysis. These models offer high computational efficiency and global performance prediction capabilities. However, simplifying assumptions limit their predictive accuracy. Future development should focus on integrating multiscale simulation with simplified models by revealing the microscopic phase transformation mechanisms of the materials to extract key parameters and behaviors. These can then be parameterized and embedded into macroscopic models to balance between accuracy and efficiency.
In contrast, neural network-based models demonstrate higher accuracy in predicting the nonlinear thermodynamic behavior of SMAs. However, their “black-box” nature limits physical interpretability, and model performance is highly dependent on data quality and coverage. Future research should focus on enhancing interpretability of physics-data hybrid models, integrating active learning and online updating techniques to improve real-time responsiveness and stability. Furthermore, incorporating parameter identification methods such as genetic algorithms and Bayesian optimization can address the challenges of parameter acquisition in traditional models.
Additionally, resistance and electrothermal models elucidate the resistance variation and electrothermal coupling during SMA actuation. These models provide theoretical support for SMA sensor technology, self-sensing control, and actuator design. However, they often neglect certain heat losses (such as thermal radiation) and the effects of temporal and spatial heterogeneity in temperature, stress, and material properties. Additionally, inaccuracies in thermal parameter measurements present significant challenges. Consequently, the predictive accuracy of these models for thermal responses under complex operating conditions is limited. Future work should focus on multiphysics coupled modeling, integrating experimental data for model calibration, and enhancing simulations of dynamic electro-thermal-mechanical coupling phenomena.
In summary, the development of WF-SMA actuation models should focus on the integration of multiscale and simplified models, the enhancement of physical interpretability in data-driven models, and the construction of multiphysics coupled frameworks. Coupled with adaptive parameter identification techniques enabling dynamic parameter adjustment, these approaches can synergistically advance improvements in model accuracy, adaptability, and robustness.
Design
The representative design configurations of WF-SMA actuators, along with their typical characteristics and applications, are summarized in Table 1. These configurations include the SMA-linear load system, SMA-nonlinear load system, and differential SMA system.
The SMA-linear load system features simple structures and straightforward mechanical transmission, facilitating motion prediction and control. It represents the readily implementable driving solution and is widely integrated into conventional mechanical structures, such as grippers61,62,63 and connection and release mechanisms65,66,67. However, its limited actuation DOF restricts complex motion capabilities. Future developments may focus on coordinated control and synchronized motion of multiple linear systems by advancing efficient multi-channel control algorithms and communication protocols. This approach can increase the system’s motion range and DOF, enhance actuator performance to meet complex application demands. Another promising direction involves the miniaturization and modular design to better accommodate space-constrained deployment scenarios. Such an approach leverages micro-nano fabrication techniques to realize miniature linear actuators that support modular array configurations.
The SMA-nonlinear load system is compact and lightweight, enabling multi-DOF motion, complex trajectories, and large-angle displacements within constrained spatial envelopes. It has been applied in flexible rotary mechanisms69,70, soft robotics71,73,74, and wearable devices72,78. Despite its high integration and multifunctionality, the nonlinear load characteristics increase the complexity of design and control. Future research should develop composite models that integrate material and structural nonlinearities. By combining physical modeling with deep learning techniques, these approaches can accurately characterize behaviors under complex nonlinear loads. Furthermore, combining reconfigurable technologies with programmable materials can enable adaptive intelligent structural designs. This approach allows dynamic adjustment of the actuator’s morphology and functionality to meet diverse functional requirements.
The differential SMA system offers advantages of rapid response and large actuation displacement, making it well-suited for high-frequency reciprocating motions. It has been widely applied in dynamic performance-critical fields such as biomimetic joints82,83,84 and 3-D steerable needles85. However, this design exhibits high energy consumption, and without effective cooling, the driving force significantly decreases and fatigue degradation intensifies. Future research should focus on developing efficient thermal management techniques, including microchannel cooling, phase transformation material-assisted heat dissipation, and forced convection cooling, to accelerate thermal recovery. Additionally, advancements in high-performance SMAs will facilitate improvements in response speed, durability, and energy efficiency.
Large-stroke SMA design serves as a crucial approach to overcoming the limitations imposed by material residual strain, enhancing structural compactness, and achieving large-stroke actuation. Its typical design configurations and limitations are summarized as follows. Curvilinear layout design utilizes the redundant internal space by arranging SMA wires in a curvilinear to increase the effective stroke. This design is well-suited for miniaturized, highly compact devices86,87,88. However, as the layout angle increases, frictional losses rise proportionally, leading to a concomitant reduction in net driving force. Modular design employs standardized modules (such as slide rail modules89 or rotary wheel modules90) to achieve large-stroke actuation by summing the displacement or rotation of each module. This design offers the flexibility to add or remove modules based on stroke requirements. However, adding modules increases actuator dimensions in non-actuating directions, posing challenges for miniaturized designs. Multi-pulley system design combines the miniaturization advantages of the curvilinear layouts with the flexibility of modular design. It amplifies actuation displacement through multiple pulley transmissions and has been widely applied in robotic hands91,92. However, its pulley-based configuration inherently constrains layout flexibility, and actuation force diminishes as module count increases. Future development of large-stroke actuators should focus on improving transmission efficiency and structural compactness. The application of novel low-friction materials and surface treatment techniques holds promise for reducing friction and energy losses, and mitigating driving force attenuation. Moreover, additive manufacturing technologies enable the fabrication of highly integrated, customized structures. This approach expands design freedom and applicability, thereby promoting miniaturization and performance enhancement of actuators.
Additionally, the miniaturization of actuators and the coordination of multiple drive units pose additional challenges to scalability and manufacturability. Integrating complex geometries and heterogeneous materials demands precise interface design and high fabrication accuracy to maintain consistent performance across SMA elements. In differential and modular systems, ensuring geometric symmetry, dimensional tolerance, and thermal uniformity becomes particularly demanding during large-scale assembly. Addressing these challenges requires standardized fabrication processes, precise joining techniques, and automated assembly methods to ensure reproducibility and scalability across actuator architectures.
Overall, the representative designs of WF-SMA actuators exhibit limitations in applicability, performance, and energy efficiency. Future developments should focus on integrating material innovations with structural optimizations to enhance system capabilities. Furthermore, the integration of additive manufacturing for multi-material composites with self-diagnostic and self-healing capabilities presents a promising avenue. Specifically, combining multi-material printing of conductive materials, SMA, and structural components with embedded nano-sensors enables the fabrication of intelligent structures that integrate actuation, self-sensing, fault prediction, and autonomous repair functionalities, thereby further enhancing the design flexibility and reliability.
Control
Various control strategies have been proposed for SMA actuators. However, several practical limitations still need to be addressed. Traditional PID controllers are widely used in SMA actuator control due to their simple structure and ease of tuning55,83,95, but their control precision and response speed remain limited. Enhanced PID variants, such as BPID and fuzzy PID92,96,97,98,99,100,101,102,103, improve dynamic performance by incorporating nonlinear compensation and adaptive tuning algorithms. However, these methods rely on empirical parameter tuning, and their performance remains unstable in complex operating conditions. Moreover, single-channel PID struggle to meet the coordination requirements of multi-DOF systems. Future research should focus on developing system identification-based multivariable PID and distributed control strategies to enhance coordination and robustness in multi-DOF systems. Additionally, integrating machine learning-assisted parameter tuning can further improve control accuracy.
Furthermore, sliding mode control104,105,106,107, as a representative model-based control method, utilizes models (such as constitutive or thermodynamic models) to design appropriate sliding surfaces and switching control laws, achieving relatively precise control. These approaches require accurate modeling and parameter estimation, and often suffer from chattering which may compromise system stability. Another methodology combines inverse hysteresis feedforward compensation with PID feedback control to mitigate hysteresis effects and improve accuracy108,109,110, but it remains relies on model accuracy. Future research should integrate high-fidelity multiphysics models to develop model-based control algorithms, thereby improving control stability and precision.
In addition, Neural network-based control methods estimate nonlinear control signals and inverse hysteresis models using NNs111,112,113,114,115,116. These methods exhibit strong nonlinear mapping capabilities that enhance control accuracy and adaptability. However, their “black-box” nature limits physical interpretability and they rely heavily on training data. Deep reinforcement learning approaches, such as Actor-Critic118,119,120, achieve learning and control through environmental interaction without requiring precise mathematical models or prior data. These methods are well suited for unknown systems and demonstrate strong adaptive capabilities. Nevertheless, their training process is complex, with convergence and stability remaining challenges, and they are difficult to implement on resource-constrained embedded systems. Future research should focus on developing interpretable physics-data hybrid models, employing active and transfer learning to reduce data dependency, and integrating prior knowledge to design efficient online learning and lightweight algorithms.
Moreover, resistance changes during actuation of SMAs provide a basis for self-sensing control. By mapping resistance to displacement (or force), closed-loop control can be achieved without additional external sensors. Polynomial fitting methods are simple and easy to implement but suffer from limited accuracy121,122,123,124. In contrast, neural network modeling offers higher accuracy but requires large datasets and exhibits limited generalization capability125,126. Future research should focus on developing multimodal sensor fusion techniques that integrate multiphysics data to enhance sensing precision. Additionally, environmental compensation algorithms should be developed to mitigate disturbance effects. The integration of intelligent self-diagnostic and self-healing mechanisms is also essential to achieve high system stability and reliability.
In summary, although considerable progress has been made in the control technologies of WF-SMA actuators, challenges remain in model accuracy, robustness, real-time performance, and intelligent control. Future efforts should prioritize the development of intelligent control algorithms that integrate physical modeling with data-driven technologies, promoting robust and adaptive control methods. Notably, adaptive control represents a universal demand in SMA actuator control. By leveraging real-time intelligent sensing, online parameter identification, and adaptive dynamic updating, adaptive control can achieve environmental compensation and autonomous parameter tuning. Such advancements are crucial for fulfilling high-performance requirements under complex dynamic conditions and for advancing the frontiers of SMA control research.
Outlook
Substantial progress in the modeling, design, and control of WF-SMA actuators has laid a robust groundwork for their implementation in real-world engineering systems. The preceding analysis, in thoroughly discussing the limitations within each of these domains, has consequently highlighted clear opportunities for future development. From a holistic perspective, further exploration may be concentrated on the following two strategic directions.
Integrated modeling-design-control framework
Although the modeling, structural design, and control strategies have been rapid developed independently, a significant disconnection still exists among them. In practical engineering applications, these aspects are closely coupled and mutually influential. Future research can focus on developing an integrated design approach to enable system-level optimization and co-evolution. Potential directions for exploration include:
-
(1)
Multi-objective trade-off design and control methods: establishing a theoretical framework for SMA actuator design and control that supports multi-objective optimization tailored to specific application requirements is imperative. Such a framework will be instrumental in accelerating the evolution of intelligent structures and the realization of SMA applications. Compared to traditional case-by-case methods, developing generalized solutions for classes of SMA problems enables systematic balancing of structural compactness, actuation stroke, and driving force, and facilitates the creation of more efficient, intelligent control strategies.
-
(2)
Digital Twin-Virtual Reality Integration platforms: building a virtual reality integration platform based on digital twin technology can unify modeling, design, and control into a closed-loop optimization system. Designers can perform multi-objective simulation and rapid iteration tailored to actual working conditions and control requirements, while continuously updating and calibrating models with real-world data. This enables real-time prediction and adjustment for SMA actuators under complex loading conditions, supporting full-lifecycle dynamic optimization.
Deep integration with machine learning
The continuous advancement of data-driven methodologies has highlighted the significant potential of machine learning for addressing challenges in complex system modeling and nonlinear control. Consequently, the integration of machine learning into the field of Shape Memory Alloy (SMA) actuators is expected to be concentrated on the following aspects:
-
(1)
Fusion of expert systems and machine learning: by combining traditional physical models with deep learning techniques, it is possible to reduce model complexity using prior physical knowledge while leveraging data mining to capture subtle nonlinear dynamics. These hybrid models offer both physical interpretability and high predictive accuracy.
-
(2)
Data-driven parameter identification and optimization: the introduction of parameter identification and model optimization techniques helps address challenges in parameter acquisition and model accuracy inherent in traditional methods. Neural networks, in combination with genetic algorithms, enable online identification and adaptive adjustment of key parameters. This method enables real-time tracking of parameter variations induced by temperature, load, and structural parameters, thereby continuously refining the model and enhancing predictive performance.
-
(3)
Adaptive intelligent design and control: leveraging machine learning, especially deep reinforcement learning, enables rapid iteration of design parameters and multi-objective autonomous optimization. This supports real-time compensation for SMA system dynamics, parameter uncertainties, and external disturbances, facilitating a shift from model-predictive design/control toward adaptive and intelligent design/control.
Conclusions
This study revisited the significant research progress in the area of WF-SMA actuators by focusing on three pillars that constitute the complete, interdependent lifecycle of actuator development: theoretical modeling, physical design, and high-performance control.
Theoretical modeling
The modeling of WF-SMA actuators primarily encompasses macroscopic constitutive models, neural network-based models and resistance and electrothermal models. Each model emphasizes distinct aspects of SMA behavior including nonlinear, thermodynamic, and actuation characteristics. These models furnish powerful tools for engineering simulation and establish the theoretical foundation for subsequent design and control. However, challenges remain in parameter identification and modeling accuracy.
Design paradigm
Based on load characteristics, SMA actuators could be categorized into SMA-linear load system, SMA-nonlinear load system and differential SMA system. Linear load system features simple structure with intuitive mechanical transmission paths. Nonlinear load system is compact and capable of multi-DOF or curved motion. Differential SMA system offers rapid response and flexible actuation. In addition, designs incorporating curvilinear layouts, modular structures, and multi-pulley systems are presented, which fulfill the requirements for large-stroke applications.
Control strategy
Despite the widespread use of PID control in SMA actuation, the nonlinearity and hysteresis of SMA have spurred increasing research into model-based and neural network-based control methods. By employing nonlinear models for controller design and compensation, these methods significantly improve system responsiveness, accuracy, and robustness. Furthermore, self-sensing control, which enables closed-loop control without external sensors, has also been explored. This approach offers a robust solution for precise control in compact systems.
Notwithstanding the significant progress achieved within the individual disciplines of modeling, design, and control for WF-SMA actuators, persistent challenges at their intersection hinder further in-depth progress. A paradigm shift towards fully integrated and intelligent system architecture is therefore necessary. This holistic approach requires unifying modeling, design, and control through interdisciplinary collaboration and technological synergy. The resulting gains in performance, energy efficiency and reliability will be also crucial for achieving breakthroughs and advancing the overall maturity of the WF-SMA actuators.
References
Chaudhari, R., Vora, J. J. & Parikh, D. M. A review on applications of nitinol shape memory alloy. Recent Adv. Mech. Infrastruct. 2021, 123–132 (2021).
Lobo, P. S., Almeida, J. & Guerreiro, L. Shape memory alloys behaviour: a review. Procedia Eng. 114, 776–783 (2015).
Jani, J. M., Leary, M., Subic, A. & Gibson, M. A review of shape memory alloy research, applications and opportunities. Mater. Des. 56, 1078–1113 (2014).
Costanza, G. & Tata, M. E. Shape memory alloys for aerospace, recent developments and new applications: a short review. Materials 13, 1856 (2020).
Hartl, D. J. & Lagoudas, D. C. Aerospace applications of shape memory alloys. Proc. Inst. Mech. Eng. G 221, 535–552 (2007).
Pittaccio, S., Garavaglia, L., Ceriotti, C. & Viscuso, S. Applications of shape memory alloys for neurology and neuromuscular rehabilitation. J. Funct. Biomater. 6, 328–344 (2015).
Hu, K., Rabenorosoa, K. & Ouisse, M. A review of SMA-based actuators for bidirectional rotational motion: application to origami robots. Front. Robot. AI 8, 678486 (2021).
Kim, M. S., Heo, J. K., Rodrigue, H. & Park, J. O. Shape memory alloy (SMA) actuators: the role of material, form and scaling effects. Adv. Mater. 35, 2208517 (2023).
Zhou, H. & Ma, N. Modeling and experimental implementation of a flexible SMA wire-based gripper for confined space operation. J. Intell. Mater. Syst. Struct. 33, 2161–2175 (2022).
Zhang, R., Chen, G., Yue, H. & Cao, Y. Design of a SMA actuated free-play elimination device for stiffness enhancement of a folding fin. Mech. Syst. Signal Process. 234, 112861 (2025).
Zhang, R. et al. Modelling of a Ti/NiTi spring-blade gear for space micro-vibration isolation. Smart Mater. Struct. 33, 015025 (2024).
Lu, Y. et al. A dynamic stiffness improvement method for thin plate structures with laminated/embedded shape memory alloy actuators. Thin-Walled Struct. 175, 109286 (2022).
Jeong, J. et al. Wrist assisting soft wearable robot with stretchable coolant vessel integrated SMA muscle. IEEE/ASME Trans. Mechatron. 27, 1046–1058 (2021).
Shariat, B. S., Meng, Q. & Mahmud, A. S. Functionally graded shape memory alloys: design, fabrication and experimental evaluation. Mater. Des. 124, 225–237 (2017).
Tabrizikahou, A. et al. Application and modelling of shape-memory alloys for structural vibration control: state-of-the-art review. Constr. Build. Mater. 342, 127975 (2022).
Ruth, D. J. S., Sohn, J. W. & Dhanalakshmi, K. Control aspects of shape memory alloys in robotics applications: a review over the last decade. Sensors 22, 4860 (2022).
Tabrizikahou, A., Kuczma, M. & Nowotarski, P. Sustainability of civil structures through the application of smart materials: a review. Materials 14, 4824 (2021).
Shehab, M., Abualigah, L. & Shambour, Q. Machine learning in medical applications: a review of state-of-the-art methods. Comput. Biol. Med. 145, 105458 (2022).
Butler, K. T., Davies, D. W. & Cartwright, H. Machine learning for molecular and materials science. Nature 559, 547–555 (2018).
Soori, M., Arezoo, B. & Dastres, R. Artificial intelligence, machine learning and deep learning in advanced robotics: a review. Cogn. Robot. 3, 54–70 (2023).
Cisse, C., Zaki, W. & Zineb, T. B. A review of constitutive models and modeling techniques for shape memory alloys. Int. J. Plast. 76, 244–284 (2016).
Hmede, R., Chapelle, F. & Lapusta, Y. Review of neural network modeling of shape memory alloys. Sensors 22, 5610 (2022).
Yuan, H., Fauroux, J. C., Chapelle, F. & Sassi, T. A review of rotary actuators based on shape memory alloys. J. Intell. Mater. Syst. Struct. 28, 1863–1885 (2017).
Xiao, Y., Zeng, P. & Lei, L. Micromechanical modelling on thermomechanical coupling of superelastic NiTi alloy. Int. J. Mech. Sci. 153, 36–47 (2019).
Xu, B., Xiong, J. & Yu, C. Improved elastocaloric effect of NiTi shape memory alloys via microstructure engineering: a phase field simulation. Int. J. Mech. Sci. 222, 107256 (2022).
Ghaffari, I. & Karami Mohammadi, A. A perturbation analysis in nonlinear free vibration of a microbeam reinforced by shape memory alloy layer based on the modified couple stress theory. J. Vib. Control 28, 304–315 (2022).
Tanaka, K. & Nagaki, S. A thermomechanical description of materials with internal variables in the process of phase transitions. Ing. Arch. 51, 287–299 (1982).
Tanaka, K. A thermomechanical sketch of shape memory effect: one-dimensional tensile behavior. Res. Mech. 18, 251–263 (1986).
Lagoudas, D. et al. Constitutive model for the numerical analysis of phase transformation in polycrystalline shape memory alloys. Int. J. Plast. 32, 155–183 (2012).
Liang, C. & Rogers, C. A. One-dimensional thermomechanical constitutive relations for shape memory materials. J. Intell. Mater. Syst. Struct. 8, 285–302 (1997).
Brinson, L. C. & Huang, M. S. Simplifications and comparisons of shape memory alloy constitutive models. J. Intell. Mater. Syst. Struct. 7, 108–114 (1996).
Du, X. W., Sun, G. & Sun, S. S. Piecewise linear constitutive relation for pseudo-elasticity of shape memory alloy (SMA). Mater. Sci. Eng. A 393, 332–337 (2005).
Zhou, B. & Yoon, S. H. A new phase transformation constitutive model of shape memory alloys. Smart Mater. Struct. 15, 1967 (2006).
Lu, Y. et al. A new variable speed phase transformation constitutive model of shape memory alloys. Mater. Res. Express 6, 105705 (2019).
Ryu, J. et al. Modified Brinson model as an equivalent one-dimensional constitutive equation of SMA spring. Proc. SPIE 7981, 1113–1119 (2011).
Kim, Y. J. et al. An enhanced Brinson model with modified kinetics for martensite transformation. J. Mech. Sci. Technol. 31, 1157–1167 (2017).
Auricchio, F., Reali, A. & Stefanelli, U. A macroscopic 1D model for shape memory alloys including asymmetric behaviors and transformation-dependent elastic properties. Comput. Methods Appl. Mech. Eng. 198, 1631–1637 (2009).
Fahimi, P., Hajarian, A. & Eskandari, A. H. Asymmetric bending response of shape memory alloy beam with functionally graded porosity. J. Intell. Mater. Syst. Struct. 31, 1935–1949 (2020).
He, B. et al. Comprehensive shape memory alloy constitutive models for engineering application. Mater. Des. 225, 111563 (2023).
Liu, Y., Zhao, T. & Ju, W. Materials discovery and design using machine learning. J. Materiomics 3, 159–177 (2017).
Lee, H. J. & Lee, J. J. Evaluation of the characteristics of a shape memory alloy spring actuator. Smart Mater. Struct. 9, 817 (2000).
Yu, B. et al. BP neural network constitutive model based on optimization with genetic algorithm for SMA. Acta Metall. Sin. 53, 248–256 (2016).
Owusu-Danquah, J. S., Bseiso, A. & Allena, S. Artificial neural network models to predict the response of 55NiTi shape memory alloy under stress and thermal cycles. Neural Comput. Appl. 34, 1–14 (2022).
Hmede, R., Chapelle, F. & Lapusta, Y. Modeling the butterfly behavior of SMA actuators using neural networks. C. R. Mécanique 350, 143–157 (2022).
Soltani, M., Bozorg, M. & Zakerzadeh, M. R. Parameter estimation of an SMA actuator model using an extended Kalman filter. Mechatronics 50, 148–159 (2018).
Lenzen, N. & Altay, O. Machine learning enhanced dynamic response modelling of superelastic shape memory alloy wires. Materials 15, 304 (2022).
Zhu, S. & Zhang, Y. A thermomechanical constitutive model for superelastic SMA wire with strain-rate dependence. Smart Mater. Struct. 16, 1696 (2007).
Lynch, B. K. Modeling of the Stress–Strain–Resistance Behaviour of Ni–Ti and Ni–Ti–Cu Shape Memory Alloys for Use in Sensorless Actuator Position Control. PhD thesis, Carleton University (2013).
Nahm, S. H., Kim, Y. J. & Kim, J. M. A study on the application of Ni–Ti shape memory alloy as a sensor. Mater. Sci. Forum 475, 2043–2046 (2005).
Cui, D., Song, G. & Li, H. Modeling of the electrical resistance of shape memory alloy wires. Smart Mater. Struct. 19, 055019 (2010).
Lynch, B., Jiang, X. X. & Ellery, A. Characterization, modeling and control of Ni–Ti shape memory alloy based on electrical resistance feedback. J. Intell. Mater. Syst. Struct. 27, 2489–2507 (2016).
Lu, Y., Zhang, R., Xu, Y., Wang, L. & Yue, H. Resistance characteristics of SMA actuator based on the variable speed phase transformation constitutive model. Materials 13, 1479 (2020).
Rodinò, S., Siciliano, M., Curcio, E. M. & Barbarino, S. Development of an automated experimental system for thermomechanical and electrical characterization of NiTi shape memory alloys. Exp. Mech. 64, 425–440 (2024).
Bhargaw, H. N., Ahmed, M. & Sinha, P. Thermo-electric behaviour of NiTi shape memory alloy. Trans. Nonferrous Met. Soc. China 23, 2329–2335 (2013).
Kalra, S., Bhattacharya, B. & Munjal, B. S. Design of shape memory alloy actuated intelligent parabolic antenna for space applications. Smart Mater. Struct. 26, 095015 (2017).
Copaci, D. S., Blanco, D. & Martin-Clemente, A. Flexible shape memory alloy actuators for soft robotics: modelling and control. Int. J. Adv. Robot. Syst. 17, 1729881419886747 (2020).
Zhang, Y. et al. Actuation response of typical biased shape memory alloy wire under variable electric heating rates: experimental investigation and modeling. J. Intell. Mater. Syst. Struct. 34, 1045389 (2023).
Ding, S., Liu, L. & Zhang, S. An LSTM-driven thermoelectric coupling response prediction method for shape memory alloy actuators. Sci. Rep. 15, 1–16 (2025).
Sgambitterra, E., Greco, C., Rodinò, S. & Barbarino, S. Fully coupled electric–thermo–mechanical model for predicting the response of a SMA wire activated by electrical input. Sens. Actuators A Phys. 362, 114643 (2023).
Naresh, C., Bose, P. S. C. & Rao, C. S. P. Shape memory alloys: a state of art review. IOP Conf. Ser. Mater. Sci. Eng. 149, 012054 (2016).
Bertetto, A. M. & Ruggiu, M. A two degree of freedom gripper actuated by SMA with flexure hinges. J. Robot. Syst. 20, 649–657 (2003).
Pai, A., Riepold, M. & Trächtler, A. Model-based precision position and force control of SMA actuators with a clamping application. Mechatronics 50, 303–320 (2018).
Takumi, I. & Sumito, N. SMA micro-hand implemented in small robot for generating gestures. Intell. Serv. Robot. 14, 399–408 (2021).
Jin, H. et al. Development of 3D reversible smart energy-saving devices for adaptive energy management. Adv. Mater. 37, 2507682 (2025).
Vázquez, J. & Bueno, J. I. Non explosive low shock reusable 20 kN hold-down release actuator. In Proc. 9th European Space Mechanisms and Tribology Symposium, 131–135 ESA Publications Division (2001).
Yoo, Y. I. et al. Development of a non-explosive release actuator using shape memory alloy wire. Rev. Sci. Instrum. 84, 015101 (2013).
Zhang, X. et al. Development of a novel shape memory alloy-actuated resettable locking device for magnetic bearing reaction wheel. Rev. Sci. Instrum. 85, 015101 (2014).
Yang, F. et al. Research on a low-impact unlocking trigger device of heavy load based on shape memory alloy fiber. Adv. Mech. Eng. 9, 1687814017724089 (2017).
Lan, C. C., Wang, J. H. & Fan, C. H. Optimal design of rotary manipulators using shape memory alloy wire actuated flexures. Sens. Actuators A Phys. 153, 258–266 (2009).
Zhou, H., Cao, S. & Ma, N. Design and performance analysis of a novel class of SMA-driven rotational mechanisms/joints. Robotica 40, 3976–3994 (2022).
Then Mozhi, G., Dhanalakshmi, K. & Choi, S. B. Design and control of monolithic compliant gripper using shape memory alloy wires. Sensors 23, 2052 (2023).
Lim, B., Lee, C. & Hwang, D. Development of embedded sensor system for 5-DOF finger-wearable tactile interface. IEEE/ASME Trans. Mechatron. 26, 1728–1736 (2021).
Rodrigue, H., Wang, W., Kim, D. R. & Park, Y. L. Curved shape memory alloy-based soft actuators and application to soft gripper. Compos. Struct. 176, 398–406 (2017).
Lee, J. H., Chung, Y. S. & Rodrigue, H. Long shape memory alloy tendon-based soft robotic actuators and implementation as a soft gripper. Sci. Rep. 9, 11251 (2019).
Lan, C. C., Lin, C. M. & Fan, C. H. A self-sensing microgripper module with wide handling ranges. IEEE/ASME Trans. Mechatron. 16, 141–150 (2010).
Huang, X. et al. Chasing biomimetic locomotion speeds: Creating untethered soft robots with shape memory alloy actuators. Sci. Robot. 3, eaau7557 (2018).
Che, J. et al. Arc-heating actuated active-morphing insect robots. Nat. Commun. 16, 3014 (2025).
Serrano, D. et al. SMA-based soft exo-glove. IEEE Robot. Autom. Lett. 8, 7146–7153 (2023).
Granberry, R. et al. Dynamic, tunable and conformal wearable compression using active textiles. Adv. Mater. Technol. 7, 2200467 (2022).
Liu, Y. et al. Braided NiTi alloys microfilaments with near-linear responses: toward flexible high-pressure sensors. J. Mater. Sci. Technol. 229, 269–278 (2025).
Wiest, J. H. & Buckner, G. D. Indirect intelligent sliding mode control of antagonistic shape memory alloy actuators using hysteretic recurrent neural networks. IEEE Trans. Control Syst. Technol. 22, 921–929 (2013).
Guo, Z., Pan, Y., Wee, L. B. & Kim, S. Design and control of a novel compliant differential shape memory alloy actuator. Sens. Actuators A Phys. 225, 71–80 (2015).
Zhu, Y. et al. Design and position control of a bionic joint actuated by shape memory alloy wires. Biomimetics 9, 210 (2024).
Jia, Z. et al. Design and force/angle independent control of a bionic mechanical ankle based on an artificial muscle matrix. Biomimetics 9, 19 (2024).
Karimi, S. & Konh, B. Self-sensing feedback control of multiple interacting shape memory alloy actuators in a 3D steerable active needle. J. Intell. Mater. Syst. Struct. 31, 1524–1540 (2020).
Pan, X. et al. A reusable SMA actuated non-explosive lock-release mechanism for space application. Int. J. Smart Nano Mater. 11, 65–77 (2020).
Yan, X. et al. A one-stage, high-load capacity separation actuator using anti-friction rollers and redundant shape memory alloy wires. Rev. Sci. Instrum. 86, 125103 (2015).
Zhang, X., Yan, X. & Yang, Q. Design and experimental validation of compact, quick-response shape memory alloy separation device. J. Mech. Des. 136, 011009 (2014).
Lu, Y. et al. A novel design of a parallel gripper actuated by a large-stroke shape memory alloy actuator. Int. J. Mech. Sci. 159, 74–80 (2019).
Britz, R., Motzki, P. & Seelecke, S. Scalable bi-directional SMA-based rotational actuator. Proc. Actuators 8, 60 (2019).
Wang, Y. et al. Design and experiment of a hand movement device driven by shape memory alloy wires. J. Robot. 2021, 6611581 (2021).
Shi, E. et al. Adaptive control for shape memory alloy actuated systems with applications to human–robot interaction. Front. Neurosci. 18, 1337580 (2024).
Singh, D. et al. Development of non-linear models to evaluate the NiTi SMA spring actuator. J. Mech. Eng. Sci. 16, 8754–8769 (2022).
Qin, K. et al. Parthenocissus-inspired soft climbing robots. Sci. Adv. 11, eadt9284 (2025).
Abdullah, E. J. et al. Temperature and strain feedback control for shape memory alloy actuated composite plate. Sens. Actuators A Phys. 283, 134–140 (2018).
Villoslada, Á et al. Position control of a shape memory alloy actuator using a four-term bilinear PID controller. Sens. Actuators A Phys. 236, 257–272 (2015).
Serrano, D. et al. SMA-based wrist exoskeleton for rehabilitation therapy. Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. 2018, 2318–2323 (2018).
Kha, N. B. & Ahn, K. K. Position control of shape memory alloy actuators by using self tuning fuzzy PID controller. Proc. IEEE Conf. Ind. Electron. Appl. 2006, 1–5 (2006).
Shi, Z. et al. A fuzzy PID-controlled SMA actuator for a two-DOF joint. Chin. J. Aeronaut. 27, 453–460 (2014).
Hu, R. et al. Force tracking fuzzy control of a shape memory alloy actuator. In Proc. Advanced Information Management, Communicates, Electronic and Automation Control Conference (IEEE, 2016).
Maffiodo, D., Raparelli, T. & Belforte, G. Fuzzy logic position control of a shape memory alloy wire. Vodenje Sistema 2010, 136–145 (2010).
Alsayed, Y. M., Abouelsoud, A. A. & El Bab, A. M. R. F. Hybrid sliding mode fuzzy logic-based PI controller design and implementation of shape memory alloy actuator. Proc. Int. Congr. Ultra Mod. Telecommun. Control Syst. Workshops 2016, 10–15 (2016).
Alsayed, Y. M., Abouelsoud, A. A. & El Bab, A. M. R. F. Fuzzy logic-based PI controller design and implementation of shape memory alloy actuator. Int. J. Autom. Control 12, 427–448 (2018).
Elahinia, M. H. & Ashrafiuon, H. Nonlinear control of a shape memory alloy actuated manipulator. J. Vib. Acoust. 124, 566–575 (2002).
Ashrafiuon, H. & Jala, V. R. Sliding mode control of mechanical systems actuated by shape memory alloy. J. Dyn. Syst. Meas. Control 131, 041006 (2009).
Romano, R. & Tannuri, E. A. Modeling, control and experimental validation of a novel actuator based on shape memory alloys. Mechatronics 19, 1169–1177 (2009).
Keshtkar, N., Keshtkar, S. & Poznyak, A. Deflection sliding mode control of a flexible bar using a shape memory alloy actuator with an uncertainty model. Appl. Sci. 10, 471 (2020).
Nguyen, B. K. & Ahn, K. K. Feedforward control of shape memory alloy actuators using fuzzy-based inverse Preisach model. IEEE Trans. Control Syst. Technol. 17, 434–441 (2009).
Zakerzadeh, M. R. & Sayyaadi, H. Precise position control of shape memory alloy actuator using inverse hysteresis model and model reference adaptive control. Mechatronics 23, 1150–1162 (2013).
Li, J. & Tian, H. Position control of SMA actuator based on inverse empirical model and SMC-RBF compensation. Mech. Syst. Signal Process. 108, 203–215 (2018).
Tai, N. T. & Ahn, K. K. A RBF neural network sliding mode controller for SMA actuator. Int. J. Control Autom. Syst. 8, 1296–1305 (2010).
Tai, N. T. & Ahn, K. K. Output feedback direct adaptive controller for a SMA actuator with a Kalman filter. IEEE Trans. Control Syst. Technol. 20, 1081–1091 (2011).
Nikdel, N. et al. Using neural network model predictive control for controlling shape memory alloy-based manipulator. IEEE Trans. Ind. Electron. 61, 1394–1401 (2013).
Asua, E., Etxebarria, V. & García-Arribas, A. Neural network-based micropositioning control of smart shape memory alloy actuators. Eng. Appl. Artif. Intell. 21, 796–804 (2008).
Son, N. N. & Anh, H. P. H. Adaptive displacement online control of shape memory alloys actuator based on neural networks and hybrid differential evolution algorithm. Neurocomputing 166, 464–474 (2015).
Senthilkumar, P. & Umapathy, M. Use of load generated by a shape memory alloy for its position control with a neural network estimator. J. Vib. Control 20, 1707–1717 (2014).
Singh, B., Kumar, R. & Singh, V. P. Reinforcement learning in robotic applications: a comprehensive survey. Artif. Intell. Rev. 55, 945–990 (2022).
Liu, H. et al. Data-driven optimal tracking control for SMA actuated systems with prescribed performance via reinforcement learning. Mech. Syst. Signal Process. 177, 109191 (2022).
Liu, H. et al. Performance-based data-driven optimal tracking control of shape memory alloy actuated manipulator through reinforcement learning. Eng. Appl. Artif. Intell. 114, 105060 (2022).
Liu, M. et al. Reinforcement learning control of a humanoid robotic hand actuated by shape memory alloy. Proc. Inst. Mech. Eng. C 235, 5736–5744 (2021).
Lan, C. C. & Fan, C. H. An accurate self-sensing method for the control of shape memory alloy actuated flexures. Sens. Actuators A Phys. 163, 323–332 (2010).
Bai, F., Zhang, X. & Xu, D. Accurate position tracking control of SMA actuators based on low-complexity self-sensing model and compound control strategy. IEEE Sens. J. 23, 2280–2290 (2023).
Guan, J. H. et al. A self-sensing and robust resistance phase transition detection method for the displacement estimation of shape memory alloy wires. Mech. Syst. Signal Process. 170, 108862 (2022).
Wang, Z. et al. A highly integrated shape memory alloy actuator and precision self-sensing tracking control based on position compensation. Sens. Actuators A Phys. 370, 115250 (2024).
Bhargaw, H. N. et al. Deep neural network-based physics-inspired model of self-sensing displacement estimation for antagonistic shape memory alloy actuator. IEEE Sens. J. 22, 3254–3262 (2022).
Pei, Y. C. et al. A machine learning empowered shape memory alloy gripper with displacement–force–stiffness self-sensing. IEEE Trans. Ind. Electron. 70, 10385–10395 (2022).
Ruth, D. J. S., Nakshatharan, S. S. & Dhanalakshmi, K. Differential resistance feedback control of a self-sensing shape memory alloy actuated system. ISA Trans. 53, 289–297 (2014).
Shi, Z. et al. Multi-feedback control of a shape memory alloy actuator and a trial application. IEEE Trans. Syst. Man Cybern. Syst. 48, 1106–1119 (2017).
Zhao, X. A bioadhesive robot to activate muscles. Nat. Mater. 22, 149–150 (2023).
Ramirez Serrano, F. et al. A springtail-inspired multimodal walking-jumping microrobot. Sci. Robot. 10, eadp7854 (2025).
Yang, X., Chang, L. & Pérez-Arancibia, N. O. An 88-milligram insect-scale autonomous crawling robot driven by a catalytic artificial muscle. Sci. Robot. 5, eaba0015 (2020).
Rodinò, S. & Maletta, C. Design considerations and applications of shape memory alloy-based actuation in morphing structures: A systematic review. Prog. Eng. Sci. 1, 100021 (2024).
Kang, W. R. et al. Morphing wing mechanism using an SMA wire actuator. Int. J. Aeronaut. Space Sci. 13, 58–63 (2012).
Yang, J. et al. Bi-direction and flexible multi-mode morphing wing based on antagonistic SMA wire actuators. Chin. J. Aeronaut. 37, 373–387 (2024).
Colorado, J. et al. Biomechanics of smart wings in a bat robot: morphing wings using SMA actuators. Bioinspir. Biomim. 7, 036006 (2012).
Yue, H. et al. Research progress of space non-pyrotechnic low-shock connection and separation technology (SNLT): a review. Chin. J. Aeronaut. 35, 113–154 (2022).
Sedky, M. et al. A new rapid-release SMA-activated micropump with incorporated microneedle arrays and polymeric nanoparticles for optimized transdermal drug delivery. Sens. Actuators B Chem. 408, 135549 (2024).
Petrini, L. & Migliavacca, F. Biomedical applications of shape memory alloys. J. Metall. 2011, 501483 (2011).
Aarnink, K. M. et al. Technical feasibility and design of a shape memory alloy support device to increase ejection fraction in patients with heart failure. Cardiovasc. Eng. Technol. 10, 1–9 (2019).
Wang, Y. et al. Bioinspired handheld time-share driven robot with expandable DoFs. Nat. Commun. 15, 768 (2024).
Lu, Y. H. et al. A shape memory alloy-based miniaturized actuator for catheter interventions. Cardiovasc. Eng. Technol. 9, 405–413 (2018).
Kim, Y. et al. SCS: superior-vena-cava compressing shape-memory-alloy-based implantable device for heart failure. Adv. Eng. Mater. 27, 2402632 (2025).
Lee, S. M. & Park, J. A soft wearable exoglove for rehabilitation assistance: a novel application of knitted shape-memory alloy as a flexible actuator. Fashion Textiles 11, 14 (2024).
Park, S. J. & Park, C. H. Suit-type wearable robot powered by shape-memory-alloy-based fabric muscle. Sci. Rep. 9, 9157 (2019).
Chen, C., Hou, F., Ma, R. & Wang, X. Design, integration and performance analysis of a lid-integral microchannel cooling module for high-power chips. Appl. Therm. Eng. 198, 117457 (2021).
Yang, J., Shen, X., Yang, W. & Li, B. Templating strategies for 3D-structured thermally conductive composites: recent advances and thermal energy applications. Prog. Mater. Sci. 133, 101054 (2023).
Suryanarayana, C., Al-Joubori, A. A. & Wang, Z. Nanostructured materials and nanocomposites by mechanical alloying: an overview. Met. Mater. Int. 28, 41–53 (2022).
Liu, J. et al. Sacrificial layer-assisted nanoscale transfer printing. Microsyst. Nanoeng. 6, 80 (2020).
Hu, X. et al. A super-stretchable and highly sensitive carbon nanotube capacitive strain sensor for wearable applications and soft robotics. Adv. Mater. Technol. 7, 2100769 (2022).
Zhao, Q. et al. A versatile transfer printing technique through soap bubble. npj Flex. Electron. 9, 76 (2025).
Ding, T., Chan, K. H., Zhou, Y. & Li, W. Scalable thermoelectric fibers for multifunctional textile electronics. Nat. Commun. 11, 6006 (2020).
Wen, N., Song, T., Ji, Z. & Zhang, Y. Recent advancements in self-healing materials: mechanicals, performances and features. React. Funct. Polym. 168, 105041 (2021).
Acknowledgements
This research is supported by the National Natural Science Foundation of China (Project U24B6005), the National Natural Science Foundation of China under the Basic Science Center Program for “Space Robot Intelligent Manipulation” (Grant No. T2388101), and the National Natural Science Foundation of China (Grant No. 62572396).
Author information
Authors and Affiliations
Contributions
R.Z.: investigation, writing—original draft, visualization. H.Y.: project administration, supervision. H.S.: supervision, conceptualization, writing—review & editing. M.W.: methodology, writing—review & editing. F.Y.: investigation, funding acquisition. J.L.: project administration. Z.Y.: conceptualization, methodology. X.H.: supervision, project administration.
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
Received:
Revised:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41378-026-01161-z
