
Abstract
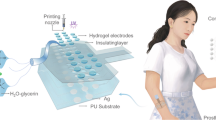
Stable acquisition and accurate recognition of surface electromyography (sEMG) signals are key elements for building high-performance human–machine interaction (HMI) systems. Owing to their excellent flexibility, electrical conductivity, and biocompatibility, conductive hydrogels show great potential in physiological electrodes and flexible sensor applications. However, existing materials often struggle to simultaneously achieve high stretchability, good conductivity, self-healing capability, and strong interfacial adhesion. In this study, a hydrogel electrode with superior comprehensive performance was developed using acrylamide (AM) and acrylic acid (AA) as the matrix, incorporating chitosan (CS), tannic acid (TA), and glycerol (Gly) via a thermally initiated polymerization method. The resulting PCGK-CT hydrogel exhibited outstanding stretchability (elongation at break of 1250%), high conductivity (0.027 S/m), excellent sensitivity (gauge factor of 0.47 at 350% strain), high signal-to-noise ratio (SNR of 13.8 ± 0.3 dB), as well as desirable self-adhesive and self-healing properties. By integrating hydrogel electrodes with flexible electronic devices, high-fidelity sEMG signal acquisition and intelligent decoding were achieved. Combined with highly realistic motion control of a biomimetic robotic hand, this work establishes a feasible technical pathway for sEMG-based HMI systems and lays a foundation for further investigation in related extended applications.

Similar content being viewed by others

Introduction
In recent years, the rapid development of fields such as human–machine interaction,1,2,3 health monitoring,4,5,6 and motion detection7,8,9 has led to a growing demand for highly biomimetic and conformable flexible devices. Consequently, the limitations of traditional rigid devices have become increasingly evident. In sEMG signal acquisition, rigid devices are prone to signal distortion caused by displacement and often result in discomfort during prolonged wear, which compromises the stability of signal collection.10,11 In contrast, flexible hydrogel materials, with their high water content and excellent biocompatibility, can form biomimetic interfaces on the skin surface, significantly reducing mechanical mismatch and the associated discomfort or interference. More importantly, by incorporating conductive fillers or designing conductive network structures, the sensitivity, response speed, and stability of hydrogel electrodes can be precisely tuned for various application scenarios, offering a novel solution for real-time sEMG signal capture.12,13,14,15,16
However, enabling conductive hydrogels to meet the complex application requirements of flexible sensors remains a major challenge. For example, conductive hydrogels must maintain long-term conformal contact with the skin,17,18,19,20 while also exhibiting strong damage resistance21,22,23,24,25 to ensure stable signal acquisition and long-term usability. To address these issues, researchers have introduced chitosan (CS) and 2-acrylamido-2-methylpropanesulfonic acid (AMPS) into polyacrylamide networks. The abundant hydroxyl and amino functional groups in CS and AMPS can form non-covalent interactions with substrates,26,27 resulting in robust, tough, and self-adhesive hydrogels.28 Meanwhile, due to the catechol groups in tannic acid (TA), which impart adhesion to various substrate surfaces, TA-modified cellulose nanocrystals (TA@CNC) have been used to prepare conductive hydrogels with excellent self-adhesive properties.29 In addition, to extend hydrogel lifespan, recent studies have focused on self-healing capabilities. This is achieved through reversible dynamic covalent crosslinking (e.g., hydrazone bond networks) or hydrogen bonding, such as dual-network frameworks formed by polyvinyl alcohol (PVA) and 4-carboxybenzaldehyde,30,31 enabling rapid recovery after mechanical damage and providing reliable reusability for hydrogel flexible electrodes.32
Based on the above, this study designed and fabricated an ionically conductive hydrogel by incorporating chitosan (CS), tannic acid (TA), and glycerol (GL) into a poly(acrylamide-co-acrylic acid) copolymer matrix to construct a self-healing and highly adhesive network. Potassium chloride (KCl) was added to enhance ionic conductivity. The hydrogel was synthesized via thermally initiated polymerization, resulting in a material with excellent elastic recovery, long-term stability, and superior electrical conductivity.
The hydrogel was integrated with a flexible printed circuit (FPC) to form a hydrogel electrode, which was adhered to the flexor and extensor muscle groups of the fingers. During finger flexion and extension, the electrode was able to capture sEMG signals from the forearm with high fidelity. These signals were then processed and classified in real time using a particle swarm optimization–extreme learning machine (PSO-ELM) algorithm.33,34,35 The recognized gesture commands were subsequently mapped into actuation signals for a bionic robotic hand, enabling multi-degree-of-freedom coordinated movement. This technology allows for accurate recognition and intelligent decoding of various hand gestures solely based on sEMG signals collected from the forearm, thereby driving the robotic hand to perform complex and precise operations. It not only improves the stability and sensitivity of signal acquisition but also ensures comfort and durability during prolonged wear. Through this innovative approach, the proposed system significantly enhances limb function restoration and quality of life for individuals with physical disabilities. Moreover, it advances the development of limb-assistive technologies toward greater intelligence, convenience, and personalization, offering new insights for future research on stretchable, highly sensitive, and multifunctional bioelectrodes and rehabilitation devices.
Experimental Section
Materials
Acrylamide (99% electrophoresis grade), acrylic acid (& gt;99%, containing 180-200 ppm MEHQ stabilizer), tannic acid (AR, 98%), ammonium persulfate (AR, 98.5%), glacial acetic acid (AR, 99.5%), N-methylene bisacrylamide (AR), potassium chloride (99.5%) and methyl blue (BS), purchased from Shanghai McLean biochemical Technology Co., Ltd. Glycerol (AR,99%) and chitosan (AR,99%) are purchased from Shanghai Aladdin biochemical Technology Co., Ltd.
Preparation of PCGK-CT hydrogels
First, 1000 mg of acrylamide, 25 mg of ammonium persulfate and 1.5 mg of N,N’-methylenebisacrylamide were added into 4 ml of deionized water. The mixture was stirred thoroughly to obtain the preconditioning solution. Then, 0.5 ml of glacial acetic acid and 500 mg of chitosan powder were taken and dissolved in 24.5 ml of deionized water. After being stirred for 30 minutes at 65 °C, it was left to stand for 12 hours, and thus the chitosan solution was obtained. Next, 20 mg of tannic acid was dissolved in 1 ml of water and stirred well to get the tannic acid solution. Subsequently, 0.2 ml of acrylic acid, 40 mg of potassium chloride, 0.2 ml of glycerol, along with the appropriate amounts of tannic acid solution and chitosan solution (the specific amounts are shown in Table 1)were added into 2 ml of the preconditioning solution. The whole was stirred homogeneously and then placed into a water bath at 65 °C for 15 min. As a result, a PCGK-CT hydrogel was obtained.
Characterization
Scanning electron microscope (SEM, S-4800) was used to observe the microstructure of the hydrogel as well as energy spectrum analysis (EDS). Before observing the microstructure, it is necessary to put the hydrogel into liquid nitrogen for ultra-low temperature quenching, followed by freeze-drying the sample for 24 h using a freeze-dryer (SCIENTZ-18N/A), and then spraying gold on its surface.
Mechanical tests
Tensile tests of hydrogels were performed on a push-pull testing machine (FUMA) with a 20 N force transducer. In the tensile test, the samples were prepared as rectangular specimens (24 mm long, 6 mm wide and 2 mm high) with a practical clamping distance of 15 mm and a tensile speed of 100 mm/min.
Conductive tests
The PCGK-CT hydrogel was cut into rectangular shapes of 40 mm × 10 mm × 2 mm, and a DT9205A high-precision digital multimeter was used to measure the resistance of the hydrogel. The relative resistance change was calculated by Eq. \(\Delta R/{R}_{0}( \% )=(R-{R}_{0})/{R}_{0}\times 100 \%\), where R0 and R are the original resistance and stretching resistance, respectively. The conductivity (σ, S/m) of the hydrogel was calculated by Eq. \(\sigma =L/(R\times A)\), where L is the distance between two neighboring probes (m), R denotes the resistance of the hydrogel (Ω), and A denotes the cross-sectional area (m2).
Adhesion tests
Acrylic plates, iron sheets, wood, rubber, and nitrile gloves were selected as the substrates to investigate the adhesion performance of PCGK-CT hydrogels by using the adhesion stretching test. In the adhesion performance test, the PCGK-CT hydrogel was cut to 20 mm × 10 mm, the size of the substrate was set to 20 mm × 50 mm, and the hydrogel was sandwiched between the two substrates for 3 min, in which the overlap area was 20 mm × 10 mm. Subsequently, the two substrates were stretched until separation in a push-pull testing machine at a speed of 60 mm/min by means of the maximum load divided (N) by the maximum load measured in the experiment. The bond strength was calculated by dividing the maximum load measured in the experiment (N) by the contact area between the hydrogel and the substrate (m2). In addition, the hydrogel was adhered to the arm and peeled off after 10 min to test its adaptation to human skin.
Self-healing tests
Rectangular hydrogels of 20 mm × 10 mm × 4 mm were prepared and cut in the middle and subsequently spliced together. The tensile properties of the rectangular hydrogels after 10 min, 30 min and 50 min of self-repair were tested using a push-pull testing machine, in which the actual clamping distance was 12 mm and the tensile speed was 60 mm/min.
Biocompatibility evaluation
L929 fibroblast cells were used to assess the cytotoxicity of the PCGK-CT hydrogel. Briefly, PCGK, PCGK-C, and PCGK-CT samples were sterilized by ultraviolet irradiation and subsequently immersed in cell culture medium at a concentration of 0.2 g/mL, followed by incubation at 37 °C for 24 h to obtain extraction media. L929 cells were seeded in 24-well plates at a density of 1 × 104 cells per well. The cells were then cultured with the respective extraction media for 24 h, after which Calcein-AM/PI staining and CCK-8 assays were performed. In the fluorescence staining, green fluorescence indicates live cells and red fluorescence indicates dead cells, while the CCK-8 assay was used to evaluate overall cell viability and cell number.
Assembly and performance testing of hydrogel electrodes and flexible sensors
The hydrogel is first assembled with the electrode buckle to construct a flexible electrode, which is then adhered to the skin surface of the arm and accurately collects the electrophysiological signals of the human body with the help of myoelectric signal acquisition device. In addition, the hydrogel is adhered to the joints of human fingers, and the dynamic change of resistance is detected with the help of wires and multimeter, so as to comprehensively evaluate the performance of hydrogel in the application of flexible electrodes and sensors.
Results and discussion
Design and characterization of PCGK-CT hydrogel
As illustrated in Fig. 1, the preparation process of the hydrogel is as follows: AM, AA, and a CS solution were first added to deionized water, followed sequentially by TA, KCl, Gly, N,N′-methylenebisacrylamide (MBA), and ammonium persulfate (APS). The resulting mixture was magnetically stirred until a clear solution was obtained. The solution was then poured into a rubber mold and cured in a 60 °C water bath for 15 min to form a hydrogel, designated as PCGK-CT. For comparison, PCGK refers to the hydrogel without CS and TA; PCGK-C refers to the hydrogel containing only CS; and PCGK-CT refers to the hydrogel containing both CS and TA.

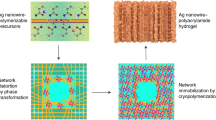
Preparation process and crosslinking mechanism of PCGK-CT hydrogel
Under heating, APS decomposes to generate free radicals that initiate the polymerization of AM and AA, forming a P(AM-co-AA) copolymer network crosslinked by MBA. The resulting polymer chains contain amino (–NH₂) and hydroxyl (–OH) groups, which can form hydrogen bonds with the hydroxyl groups of TA and Gly, as well as with the amino and hydroxyl groups on CS chains. Moreover, in the PCGK-CT system, the amino and hydroxyl groups on the CS chains further interact via hydrogen bonding with the hydroxyl groups of TA and Gly, promoting an extensive network of intermolecular interactions. These interactions result in the formation of a dense and cohesive hydrogel matrix. KCl remains in ionic form within the hydrogel and can diffuse throughout the polymer network, contributing to its ionic conductivity.
The cross-sectional morphologies of PCGK, PCGK-C, and PCGK-CT hydrogels were observed using scanning electron microscopy. As shown in Fig. 2a–c, the PCGK hydrogel exhibits a typical porous network structure composed of interconnected pores and channels of varying sizes. With the incorporation of CS, as presented in Fig. 2d–f, hydrogen bonding interactions between CS and the P(AM-co-AA) polymer chains promote the formation of a more uniform and compact internal network in the PCGK-C hydrogel, thereby enhancing its mechanical performance. Figure 2g–i displays the SEM images of the PCGK-CT hydrogel. The simultaneous incorporation of CS and TA results in additional hydrogen bonding between CS, TA, and the hydrogel matrix, leading to a reduction in pore size and the formation of a denser network structure. As illustrated in Fig. 2j and Fig. S1, energy-dispersive spectroscopy (EDS) analysis confirms the presence of C, O, and N elements within the hydrogel skeleton of PCGK-CT, while S, Cl, and K elements are uniformly distributed throughout the network. Figure 2k shows the prepared PCGK-CT precursor solution, as well as the final PCGK, PCGK-C, and PCGK-CT hydrogel samples. Specifically, PCGK hydrogel refers to the formulation without CS and TA, PCGK-C hydrogel contains only CS, and PCGK-CT hydrogel incorporates both CS and TA.

a–c PCGK hydrogel electron micrographs. d–f PCGK-C hydrogel electron micrographs. g–i PCGK-CT hydrogel electron micrographs. j EDS spectrum of PCGK-CT hydrogel. k PCGK-CT solution, PCGK, PCGK-C, and PCGK-CT hydrogel samples
Performance evaluation of PCGK-CT hydrogel
To investigate the optimal preparation scheme, the mechanical performance of hydrogels with varying concentrations of CS and TA was analyzed. As shown in Fig. 3a, when neither CS nor TA solution was added, the tensile stress and fracture strain of the PCGK hydrogel were 20.42 kPa and 395%, respectively. When the TA solution was fixed at 0.2 ml, the effect of different CS concentrations was studied. At a CS concentration of 0.25 ml, the PCGK-C0.25T0.2 hydrogel exhibited significantly enhanced mechanical performance, with tensile stress and fracture strain reaching 45 kPa and 1145%, respectively. This improvement can be attributed to the denser crosslinked network formed due to CS, which enhances the mechanical strength. However, further increasing the CS concentration to 0.5 ml led to a decrease in tensile stress to 22.05 kPa, despite a slight increase in fracture strain to 1100%. Therefore, the CS concentration was optimized at 0.25 ml. Similarly, the concentration of TA also influenced the mechanical properties. With the CS concentration fixed at 0.25 ml, the effect of varying TA concentration was studied. As shown in Fig. 3b, when the TA solution was 0.1 ml, both tensile stress and fracture strain reached optimal values of 61.25 kPa and 1250%, respectively. However, increasing the TA concentration to 0.4 ml resulted in a reduced tensile stress of only 10.62 kPa, despite a slight increase in fracture strain to 1325%. Thus, the optimal formulation selected for subsequent experiments was the PCGK-C0.25T0.1 hydrogel, containing 0.25 ml CS and 0.1 ml TA. To evaluate the elasticity and resilience of the PCGK-C0.25T0.1 hydrogel, cyclic tensile and ultimate tensile tests were conducted. As shown in Fig. 3c, when subjected to a strain of 400%, the stress-strain curves remained almost unchanged over four consecutive cycles, indicating minimal energy dissipation. Figure 3d demonstrates the hydrogel’s maximum elongation from 20 mm to 295 mm during tensile testing, showcasing its excellent stretchability. This suggests that the hydrogel can meet the deformation demands of human motion when used as a flexible wearable sensor or physiological electrode. As shown in Fig. 3e, the PCGK-C0.25T0.1 hydrogel displays good flexibility, allowing for easy knotting and twisting. Furthermore, it was able to withstand puncture and lift a 100 g weight without breaking, confirming its excellent mechanical strength. A cylindrical hydrogel sample (20 mm diameter, 10 mm height) was prepared to evaluate compressive toughness. As shown in Fig. S2, the hydrogel was compressed to 50% of its original height and fully recovered after pressure release, demonstrating outstanding compressive resilience.

a Stress–strain curves of hydrogels with different chitosan concentrations. b Stress–strain curves of hydrogels with different TA concentrations. c Loading–unloading cyclic curves of hydrogel. d Ultimate elongation of hydrogel. e Knotting, twisting, puncturing, and lifting of 100 g weights of the hydrogel. f The hydrogel is cut and reassembled and stretched. g Stress–strain curves after different self-healing times. h The brightness change of light emitting diodes during stretching of the hydrogel. i Relationship between strain and resistivity change of the hydrogel. j Relative resistance change of the hydrogel under varying strains. k Finger movement signal acquisition by the hydrogel strain sensor. l Adhesion strength of the hydrogel to different materials. m Recyclability test of the hydrogel
To evaluate the self-healing performance of the PCGK-CT hydrogel, two cylindrical hydrogel samples (10 mm in height and 20 mm in diameter) were prepared. One of the hydrogels was stained with methylene blue to facilitate observation of the healing process. The two cylindrical hydrogels were then cut in half and reassembled by combining the half-cylinders of different colors. After 1 h, the self-healing condition was observed. As shown in Fig. 3f, the two pieces successfully merged into a complete hydrogel. Even after undergoing tensile deformation, the hydrogel remained intact without breaking, indicating that the PCGK-CT hydrogel exhibits excellent self-healing ability. This remarkable self-repairing property is mainly attributed to the presence of hydrogen bonds and ionic interactions within the PCGK-CT hydrogel network. When the hydrogel is cut and rejoined, these dynamic interactions help re-establish the internal crosslinked network. As shown in Fig. 3g, to further quantify the self-healing capability, the hydrogel was cut in half and allowed to heal for varying periods of time before conducting tensile fracture tests. The results indicate that both stress and strain increase with healing time. Specifically, the hydrogels healed for 10, 30, and 50 min exhibited tensile stresses of 8.82 kPa, 10.54 kPa, and 17.64 kPa, and fracture strains of 170.83%, 183.3%, and 187.5%, respectively. These results demonstrate that the PCGK-CT hydrogel possesses strong self-healing ability, and that its mechanical properties can gradually recover over time.
The presence of free K⁺ and Cl⁻ ions in the PCGK-CT hydrogel provides conductive carriers, while the internal porous network structure offers pathways for ion migration, endowing the hydrogel with excellent electrical conductivity. To visually assess the sensitivity of the hydrogel at the macroscopic level, a simple circuit was constructed by connecting a 5 V power supply, a blue LED, and the PCGK-CT hydrogel in series. As shown in Fig. 3h, when the hydrogel is initially connected into the circuit, the LED lights up brightly, indicating its good conductivity. Upon stretching the hydrogel, the LED noticeably dims, primarily because the increased length and reduced cross-sectional area lead to longer and narrower ion transport pathways, resulting in an increase in electrical resistance. When the hydrogel returns to its original length, the brightness of the LED also recovers. To quantify the sensitivity of the PCGK-CT hydrogel, its conductivity was measured to be 0.027 S/m. Figure 3i presents the relationship between strain and relative resistance change, clearly showing that the resistance increases with strain. A quadratic function fitting of the measured data reveals a clear relationship: (R - R0)/R0 = 2.6622–0.02943x + 0.00141x², with a fitting coefficient of R² = 0.99394, the high fitting coefficient indicates that the electrical response of the PCGK-CT hydrogel varies in a stable and predictable manner with mechanical strain over a large deformation range. This stable strain–resistance behavior suggests that the internal ionic conductive network of the hydrogel does not undergo abrupt fracture or irreversible reconstruction during stretching; instead, continuous regulation is achieved through network elongation and geometric changes of the conductive pores. The conductive network therefore exhibits continuous and stable response characteristics over a wide strain range, providing material-level support for maintaining consistent electrical performance under skin deformation during practical use. In addition, the sensitivity of the hydrogel was evaluated. The strain sensitivity is generally characterized by the gauge factor (GF). Accordingly, at a strain of 350%, the PCGK-CT hydrogel exhibits a GF value of 0.47. To further validate the conductivity and cyclic usability of the hydrogel, relative resistance change was measured during cyclic tensile-recovery tests. As shown in Fig. 3j, significant and consistent resistance changes were observed under both low strain (30–60%) and high strain (200%) conditions, and no obvious degradation was found over multiple cycles. Furthermore, a rectangular piece of hydrogel was wrapped around a hex key to form a makeshift stylus. As demonstrated in Fig. S3, the stylus could easily write letters (e.g., “CJLU”) and draw patterns (e.g., a stick figure) on a smartphone screen. The hydrogel’s soft and smooth surface caused no damage to the screen, highlighting its potential for safe and practical electronic interactions. To evaluate the self-healing electrical performance of the PCGK-CT hydrogel, a simple circuit consisting of a 5 V power source, a LED, and the hydrogel was assembled. As illustrated in Fig. S4, the LED was instantly lit when the circuit was complete. After the hydrogel was cut, the LED immediately turned off. Upon rejoining the two separated hydrogel pieces, the LED lit up again. To quantitatively assess the conductive performance after self-healing, the electrical conductivity of the PCGK-CT hydrogel was measured and compared before fracture and after self-repair. The results show that the conductivity of the hydrogel slightly decreased from 0.027 S/m before fracture to 0.026 S/m after self-healing, corresponding to a conductivity recovery of approximately 96%. This result indicates that the self-healing process has a negligible effect on the overall conductive capability of the hydrogel. These results demonstrate the hydrogel’s excellent self-healing ability, which significantly enhances its operational lifespan. Finally, to explore its application as a hydrogel flexible strain sensor, the PCGK-CT hydrogel was affixed to a human finger, and repeated bending and straightening movements were performed. To further verify the electrical stability and reusability of the PCGK-CT hydrogel under dynamic deformation, resistance variation was measured during cyclic stretching–releasing tests. As shown in Fig. 3k, when the hydrogel was attached to the surface of a finger, the relative resistance change responded in real time to repeated finger bending and extension, and no obvious baseline drift or performance degradation was observed after multiple cycles. These results demonstrate that the PCGK-CT hydrogel can maintain stable electrical behavior under repeated deformation, which is of critical importance for reducing motion-related interference and improving signal acquisition stability at the electrode and skin interface during practical use.
Inspired by mussels, TA, which is rich in catechol groups, was introduced into the PCGK-CT hydrogel to endow it with adhesive properties. As shown in Figs. S5 and S6, the PCGK-CT hydrogel can tightly adhere to various substrates, including glass, paper, rubber, plastic, metal, wood, foam, nylon, and pigskin. This adhesion is primarily due to the multiple interactions facilitated by TA, such as hydrogen bonding, hydrophobic interactions, π-π stacking, and cation-π interactions, which enable the hydrogel to bond firmly with the surface of different materials. As demonstrated in Fig. S7, the hydrogel can be directly applied to finger joints, maintaining close contact with the skin even during bending and straightening movements. Fig. S8 further shows that the hydrogel adheres easily to the skin of the forearm and can be removed without causing any irritation. Moreover, the hydrogel can still reattach tightly to the skin after being removed and reapplied. To quantitatively assess the adhesive properties of the PCGK-CT hydrogel, adhesion tensile tests were conducted after bonding the hydrogel to different substrates. As shown in Fig. 3l, the adhesion strengths of the hydrogel to acrylic, iron, wood, rubber, and nitrile gloves were 9.33, 4.14, 9.36, 6.71, 3.97, and 10.93 kPa, respectively. These values indicate that the hydrogel can remain firmly attached to human skin without detachment. Additionally, to evaluate the reusability of its adhesive properties, the hydrogel was repeatedly attached to and removed from the skin, and the adhesion strength was measured after 0, 20, and 40 cycles. As shown in Fig. 3m, the adhesive strengths after initial attachment, 20 cycles, and 40 cycles were 5.17, 4.03, and 3.32 kPa, respectively. These results demonstrate the PCGK-CT hydrogel’s potential for reusable applications.
As shown in Fig. S9, a systematic evaluation of the biocompatibility of the hydrogels was performed by combining the quantitative results of the CCK-8 cell viability assay with the qualitative observations from Calcein-AM/PI live dead fluorescence staining. The CCK-8 results indicate that cell viability in the control group remained at approximately 100%. In contrast, the PCGK group exhibited a reduced cell viability of approximately 79%, which was significantly lower than that of the control, suggesting that certain components in the system may exert a mild inhibitory effect on cellular metabolic activity. Upon the introduction of CS, the cell viability of the PCGK-C group increased to approximately 86%, indicating that the incorporation of CS partially improved the cytocompatibility of the system. With the further introduction of TA, the cell viability of the PCGK-CT group increased to approximately 96%, showing no significant difference compared with the control group. This result demonstrates that the synergistic incorporation of CS and TA effectively reduced the potential cytotoxicity of the material, enabling the hydrogel system to achieve a level of biosafety comparable to that of the control. This trend was further corroborated by the Calcein-AM/PI dual-staining results. Cells in the control group exhibited predominantly strong green fluorescence, with high cell density, good adhesion, and well-spread morphology, and almost no PI-positive cells were observed. In the PCGK group, although live cells remained dominant, sporadically distributed red PI-positive cells were observed, indicating mild cell membrane damage or cell death. In the PCGK-C group, the number of PI-positive cells was markedly reduced, and the cells displayed more uniform morphology and improved spreading behavior. Notably, the PCGK-CT group exhibited fluorescence characteristics highly similar to those of the control group, with the highest proportion of live cells, minimal dead cells, and natural, intact cell morphology. The strong agreement between the quantitative and qualitative results confirms that the synergistic introduction of CS and TA does not introduce additional biosafety risks; instead, it significantly improves cytocompatibility, likely by stabilizing the hydrogel network and reducing the release of migratable small molecules. For sEMG electrodes intended for skin attachment and long-term contact, the PCGK-CT hydrogel therefore demonstrates excellent biocompatibility and enhanced safety for practical applications.
To clearly highlight both the advantages and potential limitations of the material, a comparison with representative previously reported works36,37,38,39,40 is presented in Table S1. The results indicate that the PCGK-CT hydrogel achieves a comprehensive and well-balanced performance across multiple key metrics, including SNR, adhesion performance, stretchability, and self-healing capability. While maintaining a high SNR, the hydrogel simultaneously exhibits strong adhesion strength and large stretchability. In particular, the intrinsic self-healing property of PCGK-CT represents a distinctive advantage that is difficult to achieve in many existing systems that typically emphasize either high conductivity or high extensibility alone. These combined characteristics suggest that the PCGK-CT hydrogel is not only well suited as a highly adhesive and deformable skin-mounted electrode material, but also capable of providing stable and reliable signal interfaces for flexible wearable sensors in human–machine interaction and medical monitoring applications.
sEMG signal acquisition using PCGK-CT hydrogel
The PCGK-CT hydrogel, which exhibits excellent properties such as high stretchability, self-adhesion, and self-healing, holds significant advantages in flexible strain sensing and physiological signal acquisition applications. As illustrated in Fig. S10a, a schematic diagram of the PCGK-CT hydrogel electrode is shown, in which the hydrogel is assembled with snap connectors to form a wearable and self-adhesive electrode suitable for collecting physiological signals from the human body. Fig. S10b and S10c show the physical appearance of the hydrogel electrode and its placement on the forearm, respectively. The images clearly demonstrate that the hydrogel electrode adheres tightly to the surface of the forearm skin, effectively reducing interfacial impedance during signal acquisition. To ensure the accuracy and fairness of the comparison in terms of SNR and sEMG signal acquisition performance, the geometric dimensions of the electrodes were standardized, as shown in Fig. S11, The fabricated hydrogel electrodes had a radius of 10 mm and a thickness of 2 mm, which were identical to those of the commercial Ag/AgCl electrodes. This standardized design effectively eliminates the influence of electrode size differences on signal acquisition results, thereby ensuring the rationality and reliability of the comparative analysis. To record sEMG, the hydrogel electrode was attached to the flexor carpi radialis muscle, where electrode 1 served as the measurement electrode, while electrodes 2 and 3 acted as the ground and reference electrodes, respectively. Figures 4a, b present the surface EMG (sEMG) signals acquired using the PCGK-CT hydrogel electrode and a conventional Ag/AgCl electrode. The experimental results show that both electrodes were capable of stably recording distinct sEMG signals during hand relaxation and fist clenching, with clear correlations between signal amplitude and muscle activity, thereby confirming their effectiveness in signal acquisition. Previous studies have shown that noise contamination can significantly degrade the accuracy of sEMG pattern recognition, and that improving signal quality through approaches such as spectral enhancement can markedly enhance classification performance, indicating a close relationship between SNR and classification accuracy.41 Therefore, improving the quality of sEMG signals at the electrode skin interface, particularly by enhancing SNR is of critical importance for constructing stable and reliable sEMG-based HMI systems. Based on these considerations, SNR was selected in this study as a key evaluation metric to systematically analyze the performance of different electrodes in sEMG signal acquisition. Under initial conditions, the hydrogel electrode achieved an SNR of 13.8 ± 0.3 dB, representing a significant improvement of approximately 3.3 dB compared with the commercial Ag/AgCl electrode (10.5 ± 0.3 dB), indicating superior noise suppression and signal acquisition quality. To further verify its stability and reliability during long-term use, the performance of the electrodes after repeated adhesion cycles and after damage followed by self-healing was evaluated. As shown in Fig. 4c–e, when repeatedly attached to the same location on the forearm, the hydrogel electrode maintained SNR values of 13.5 ± 0.3 dB, 9.9 ± 0.3 dB, and 6.6 ± 0.3 dB after 1, 5, and 15 reuse cycles, respectively, demonstrating good signal consistency. In contrast, under the same repeated adhesion conditions, the SNR of the commercial Ag/AgCl electrode decreased to 9.7 ± 0.3 dB, 7.1 ± 0.3 dB, and 2.9 ± 0.3 dB, respectively. In addition, as shown in Fig. S12, after deliberate fracture followed by 10 minutes of self-healing, the hydrogel electrode recovered an SNR of 13.3 ± 0.3 dB, showing no significant difference from its initial state. These results indicate that the hydrogel electrode developed in this study not only outperforms conventional electrodes in terms of initial electrical performance, but also exhibits pronounced advantages in reusability and self-healing capability, thereby providing critical support for its application in long-term, reusable wearable bioelectrical signal monitoring and HMI.

a sEMG signal acquisition using PCGK-CT hydrogel electrode. b sEMG signal acquisition using Ag/AgCl electrode. c Comparison of sEMG signals acquired by Ag/AgCl and PCGK-CT hydrogel electrodes after the 1st adhesion. d Comparison of sEMG signals acquired by Ag/AgCl and PCGK-CT hydrogel electrodes after the 5th adhesion. e Comparison of sEMG signals acquired by Ag/AgCl and PCGK-CT hydrogel electrodes after the 15th adhesion. f Schematic diagram of the integrated design of the hydrogel electrode. g Partial dual-channel sEMG signals of gesture 1. h Partial dual-channel sEMG signals of gesture 2. i Partial dual-channel sEMG signals of gesture 3. j Partial dual-channel sEMG signals of gesture 4. k Partial dual-channel sEMG signals of gesture 5
From the perspectives of conduction mechanism and interfacial contact behavior, the PCGK-CT hydrogel exhibits fundamental differences from conventional Ag/AgCl electrodes. PCGK-CT is a typical ionic conductive system, in which a continuous hydrated network provides stable pathways for ion transport. The electrode–skin interface primarily enables sEMG sensing through ionic conduction and electrolyte contact, which is beneficial for alleviating interfacial polarization effects and suppressing pronounced fluctuations in contact impedance. In contrast, Ag/AgCl electrodes rely on electronic conduction and possess relatively rigid electrode bodies, making them more susceptible to microscopic slippage or local detachment during skin stretching, bending, or shear deformation, thereby introducing additional motion artifacts and low-frequency noise. Moreover, the PCGK-CT hydrogel features excellent softness and skin conformability, allowing it to deform synchronously with the skin while maintaining a stable effective contact area. As demonstrated by the aforementioned performance evaluations, the hydrogel structure remains intact and continuous under bending and stretching conditions. This favorable mechanical matching helps mitigate transient interfacial disturbances and mechanical impacts at the electrode–skin interface, thereby reducing their influence on signal quality. The synergistic effects of conductive network continuity, ionic transport characteristics, and superior interfacial conformability enable the hydrogel electrode to more effectively suppress motion-related interference under dynamic wearing and limb movement conditions, resulting in a higher sEMG signal-to-noise ratio.
To further improve the accuracy of electromyographic signal acquisition, an integrated design of the hydrogel electrode was developed. As shown in Fig. 4f, the hydrogel electrode structure was fabricated on a single flexible printed circuit (FPC) with three branches, each containing one soldering pad, corresponding to the measurement electrode, ground electrode, and reference electrode. The distance between adjacent pads was set at 30 mm. A photograph of the physical device is provided in Fig. S13. For practical applications, particularly in gesture recognition systems based on sEMG signals, commonly used daily gestures were selected to enhance usability. Five representative hand gestures were chosen for sEMG data collection: Gesture 1 (OK), Gesture 2 (thumbs up), Gesture 3 (four fingers extended), Gesture 4 (index finger extended), and Gesture 5 (fist clench). During the sEMG data acquisition process, subjects were asked to sit quietly in a chair, with their right forearm naturally relaxed and resting on a table to maintain stability. Prior to electrode placement, medical alcohol was used to clean the skin surface to remove oils and impurities, thereby effectively reducing skin impedance and improving signal quality and reliability. The integrated hydrogel electrodes were then attached to the surface of the subject’s flexor and extensor muscle groups on the right forearm. During data collection, the subject performed each gesture in response to prompts, with each gesture held for approximately 1.5 s. To minimize fatigue and ensure the consistency and accuracy of the collected data, subjects were given a 2 min rest period after every 10 gesture repetitions. Each gesture was repeated 40 times, resulting in a total of 200 recorded gestures. The acquired sEMG data covered all five gesture types, corresponding to Gestures 1 through 5. Figure 4g–k display sample dual-channel sEMG waveforms for each of the five gesture actions.
Gesture recognition and control based on PCGK-CT hydrogel electrodes
For sEMG signals, time-domain feature extraction primarily focuses on amplitude variations and fluctuation characteristics over time. By calculating parameters such as the absolute mean value, root mean square, waveform length, and variance, valuable information can be obtained regarding muscle activity intensity, stability, and complexity. In contrast, frequency-domain feature extraction analyzes the frequency components and energy distribution of the signal. It is particularly effective for capturing the dynamic characteristics of non-stationary signals and can complement the limitations of time-domain features. To achieve comprehensive characterization, a total of sixteen features were extracted from channel one and channel two, including absolute mean value, root mean square value, waveform length, and variance in the time domain, as well as dominant frequency, median frequency, mean frequency, and frequency ratio. These features were then used to construct scatter plots for the time-frequency feature distribution, allowing observation of their discriminative ability for different hand gestures.
In Fig. 5a–f, the horizontal and vertical axes respectively represent features from channel one and channel two, including mean frequency, absolute mean value, waveform length, median frequency, root mean square value, and variance. Figures S14 and S15 display scatter plots with frequency ratio and dominant frequency as coordinates. As shown in the plots, while the distributions of the five hand gestures exhibit some degree of overlap in features such as mean frequency, absolute mean value, waveform length, and median frequency, the overall separability is relatively good, indicating that these features provide effective discrimination among the gestures. From the scatter distributions of variance, frequency ratio, and dominant frequency, it can be observed that the feature representations of the five gestures are highly clustered in the corresponding feature space, with pronounced overlap among different classes. This indicates that these features exhibit limited discriminative capability for distinguishing different gestures within the current dataset. Based on this feature discriminability analysis, features with weak classification ability and high inter-class overlap were removed to reduce redundant information and to construct a more compact and discriminative feature subset. To further evaluate the impact of the removed features on gesture classification performance and to verify the rationality of the feature selection process, a comparative analysis of gesture classification results was conducted using the Extreme Learning Machine (ELM). As shown in Fig. 5g, the prediction results for five-gesture classification using 10 features and 16 features were compared. The overall results demonstrate that the classification performance based on 10 features is largely comparable to that obtained using 16 features, and even exhibits superior recognition performance for Gesture 1 and Gesture 2. This phenomenon indicates that removing irrelevant or redundant features helps reduce feature dimensionality and mitigate the risk of model overfitting, thereby improving the generalization capability and computational efficiency of the ELM model. Therefore, based on the combined results of feature discriminability analysis and classification performance evaluation, a total of 10 features—including the absolute mean value, root mean square value, and waveform length in the time domain, as well as the median frequency and mean frequency in the frequency domain—extracted from Channel 1 and Channel 2, were ultimately selected as the input features for the subsequent gesture classification model.

a Mean frequency scatter plot. b Absolute mean value scatter plot. c Waveform length scatter plot. d Median frequency scatter plot. e Root mean square scatter plot. f Variance scatter plot. g Comparison of prediction results. h Prediction results of PSO-ELM. i Confusion matrix of PSO-ELM. j Schematic diagram of the experimental platform
Feature extraction was performed on the sEMG signals corresponding to five different gestures. Specifically, time-domain features: including the absolute mean value, root mean square, and waveform length, and frequency-domain features: including the median frequency and mean frequency, were extracted from dual-channel sEMG signals and used as input variables for both the PSO-ELM and ELM classifiers. To verify the performance advantage of PSO-ELM over the standard ELM in gesture recognition and classification, a hold-out validation strategy was adopted to split the dataset into a training set (70%) and a testing set (30%). The dataset comprised a total of 1600 samples, with an equal distribution across gestures (480 samples per gesture). Both PSO-ELM and ELM models were trained using the training and validation data, and gesture recognition was subsequently performed on the test set. As shown in Fig. 5h, i, S16 and S17, the prediction results and confusion matrices of PSO-ELM and ELM are presented, respectively. In the classification results, labels 1–5 correspond to gestures 1–5, namely OK, fist clenching, thumbs-up, four-finger extension, and index-finger extension. The PSO-ELM algorithm achieved an average gesture recognition accuracy of 94.375%, whereas the ELM algorithm yielded an average accuracy of 88.542%, representing an improvement of 5.833%. For PSO-ELM, misclassified samples were mainly concentrated in gestures 2, 3, and 4, with relatively low error proportions. In contrast, misclassifications in the ELM results were more broadly distributed across all classes, particularly in classes 2 and 4, with a larger number of incorrectly predicted samples. Overall, PSO-ELM exhibited superior classification performance on the test data compared with ELM, especially for gestures 2, 3, and 4. These results indicate that optimizing the ELM parameters using the PSO algorithm effectively enhances the model’s generalization capability and classification accuracy. Accordingly, PSO-ELM was selected as the classifier for subsequent online real-time gesture recognition.
To facilitate the implementation of the robotic hand control experiment, an experimental platform was constructed, as illustrated in Fig. 5j. This platform consists of four core components: hydrogel electrodes, an sEMG signal acquisition system, a gesture recognition system, and the robotic hand itself. The circuit design of the sEMG acquisition system is shown in Fig. S18. First, the PU film ensures that the hydrogel electrodes adhere tightly to the forearm. The signal output ends of the electrodes are connected to the sEMG acquisition system via wires. Once the signals are received, the system performs necessary filtering and amplification to improve signal quality. The processed signals are then transmitted via serial communication to the gesture recognition system on the host computer. This system analyzes and processes the data to identify the user’s gesture intent and sends corresponding gesture command signals to the robotic hand control system through the serial port. Finally, the robotic hand executes the appropriate actions based on the received commands. The physical setup of the experimental platform is shown in Fig. S19, and the demonstration video is provided as Supplementary Movie 1.
Finally, to further evaluate the overall performance of the PCGK-CT hydrogel electrode and the gesture recognition system, the recognition accuracy of the proposed system was compared with that of recently reported sEMG recognition systems based on various hydrogel electrodes, with the corresponding results summarized in Table S1. The comparison demonstrates that the proposed system achieves a relatively high level of gesture recognition accuracy among comparable hydrogel-based electrode systems. When combined with the aforementioned advantages in electrical conductivity, adhesion, stretchability, and self-healing capability, these results indicate that the PCGK-CT hydrogel electrode holds strong potential for constructing stable and reliable sEMG acquisition and robotic hand control platforms.
Conclusion
In summary, this study developed a conductive hydrogel with high sensitivity, excellent stretchability, and a high SNR. These properties enable high-fidelity acquisition and intelligent analysis of sEMG signals for precise collaborative control of a robotic hand. The hydrogel exhibits outstanding self-healing capability, which significantly extends its service life. Under cyclic loading conditions, the hydrogel maintains stable and durable resistance variation behavior, indicating good electrical reliability. When assembled into physiological electrodes, the PCGK-CT hydrogel efficiently captured forearm EMG signals during fist-clenching and relaxation states. By integrating the hydrogel electrode with PSO-ELM algorithm, the system achieved a gesture recognition accuracy of 94.375%. This study provides a reliable interface material and system framework for sEMG–based HMI, and demonstrates the feasibility and stability of the proposed hydrogel electrode for high-quality sEMG signal acquisition and robust gesture recognition. Experimental results obtained in a biomimetic robotic hand control scenario indicate that the system exhibits promising potential for human–machine interaction applications. Future work will further extend the validation of the proposed system under more complex usage scenarios and explore adaptive learning strategies to enhance its generalization capability across diverse operating conditions.
Data availability
Data will be made available on request.
References
Gu, J. et al. Recent advances in nanowire-based wearable physical sensors. Biosensors. 13, 1025 (2023).
Zhang, S. et al. Deep learning in human activity recognition with wearable sensors: A review on advances. Sensors. 22, 1476 (2022).
Hong, Q. et al. 3d dual-mode tactile sensor with decoupled temperature and pressure sensing:Toward biological skins for wearable devices and smart robotics. Sens. Actuators B: Chem. 404, 135255 (2024).
Kaur, B., Kumar, S. & Kaushik, B. K. Novel wearable optical sensors for vital health monitoring systems—a review. Biosens.-Basel 13, 181 (2023).
Li, J. et al. Engineering smart composite hydrogels for wearable disease monitoring. Nano-Micro Lett. 15, 105 (2023).
Kulkarni, M. B. et al. Recent advances in smart wearable sensors for continuous human health monitoring. Talanta.272, 125817 (2024).
Xu, K. & Wang, C. Recent progress on wearable sensor based on nanocomposite hydrogel. Curr. Nanosci. 20, 132–145 (2024).
Gao, Z. et al. Advances in wearable strain sensors based on electrospun fibers. Adv. Funct. Mater. 33, 2214265 (2023).
Hyun, J. E. et al. Wearable ion gel based pressure sensor with high sensitivity and ultra-wide sensing range for human motion detection. Chem. Eng. J. 484, 149464 (2024).
Wu, S. An overview of hierarchical design of textile-based sensor in wearable electronics. Crystals 12, 555 (2022).
Ding, H. et al. The latest research progress of conductive hydrogels in the field of electrophysiological signal acquisition. J. Mater. Chem. C. 12, 3030–3052 (2024).
Yu, Z. et al. Smart hydrogels for shape deformation: Mechanism, preparation, and properties. J. Mater. Chem. C. 12, 16646–16676 (2024).
Zhang, L. et al. Neuron-inspired multifunctional conductive hydrogels for flexible wearable sensors. J. Mater. Chem. C. 10, 4327–4335 (2022).
Xie, T. et al. Dual–network carboxymethyl chitosan conductive hydrogels for multifunctional sensors and high–performance triboelectric nanogenerators. Carbohydr. Polym. 333, 121960 (2024).
Bai, M. et al. Bioinspired adaptive lipid-integrated bilayer coating for enhancing dynamic water retention in hydrogel-based flexible sensors. Nat. Commun. 15, 10569 (2024).
Ni, Y. et al. Environmental stability stretchable organic hydrogel humidity sensor for respiratory monitoring with ultrahigh sensitivity. Adv. Funct. Mater. 34, 2402853 (2024).
Zhou, J. et al. Bio-inspired, super-stretchable and self-adhesive hybrid hydrogel with sc-pda/go-Ca2+/pam framework for high precision wearable sensors. Chem. Eng. J. 447, 137259 (2022).
Shi, M. et al. Cellulose nanofibril enhanced ionic conductive hydrogels with high stretchability, high toughness and self-adhesive ability for flexible strain sensors. Int. J. Biol. Macromol. 293, 139297 (2025).
Jiang, L. et al. Highly self-adhesive, compressible, stretchable, all hydrogel-based supercapacitor for wearable/portable electronics. Mater. Today Phys. 33, 101046 (2023).
Xu, R. et al. A strong and double-sided self-adhesive hydrogel sensor. Macromol. Rapid Commun. 44, 2300182 (2023).
Zheng, H. et al. Self-healing, self-adhesive silk fibroin conductive hydrogel as a flexible strain sensor. ACS Appl. Mater. Interfaces 13, 40013–40031 (2021).
Khadka, A. et al. Rapidly self-healing, highly conductive, stretchable, body-attachable hydrogel sensor for soft electronics. Compos. Commun. 52, 102158 (2024).
Zhai, Z. et al. Synthesis and real-time characterization of self-healing, injectable, fast-gelling hydrogels based on alginate multi-reducing end polysaccharides (mreps). Carbohydr. Polym. 338, 122172 (2024).
Jia, L. et al. Ultra-fast cryogenic self-healing ionic hydrogel for flexible wearable bioelectronics. Chem. Eng. J. 495, 153734 (2024).
Zhao, B. et al. Multi-touch microcapsules/silicone-polyacrylate hybrid hydrogels with precise self-healing ability and their self-powered sensing applications in emergency rescue. Chem. Eng. J. 500, 157149 (2024).
Ding, H. et al. Mechanisms of genipin and mcnt effects on the actuation properties and failure of chitosan gel bionic artificial muscles. J. Mater. Sci.: Mater. Electron. 35, 1381 (2024).
Yu, Z. et al. Investigating the driving performance of chitosan-based artificial muscles: The effect of genipin and mcnt addition ratios. J. Mater. Sci.: Mater. Electron. 36, 437 (2025).
Jin, R. et al. Chitosan-driven skin-attachable hydrogel sensors toward human motion and physiological signal monitoring. Carbohydr. Polym. 268, 118240 (2021).
Liu, X. et al. Cellulose nanocrystal reinforced conductive nanocomposite hydrogel with fast self-healing and self-adhesive properties for human motion sensing. Colloids Surf. A: Physicochemical Eng. Asp. 613, 126076 (2021).
Liu, X. et al. Conductive and self-healing hydrogel for flexible electrochemiluminescence sensor. Microchimica Acta.190, 123 (2023).
Zhao, L. et al. A multifunctional, self-healing, self-adhesive, and conductive sodium alginate/poly(vinyl alcohol) composite hydrogel as a flexible strain sensor. ACS Appl. Mater. Interfaces 13, 11344–11355 (2021).
Wang, X. et al. Constructing conductive and mechanical strength self-healing hydrogel for flexible sensor.J. Sci.: Adv. Mater. Devices 8, 100563 (2023).
Vidhya, S. & Kamaraj, V. Particle swarm optimized extreme learning machine for feature classification in power quality data mining. Automatika 58, 487–494 (2017).
Surantha, N., Lesmana, T. F. & Isa, S. M. Sleep stage classification using extreme learning machine and particle swarm optimization for healthcare big data. J. Big Data 8, 14 (2021).
Albadr, M. A. A. & Tiun, S. Spoken language identification based on particle swarm optimisation–extreme learning machine approach. Circuits, Syst., Signal Process. 39, 4596–4622 (2020).
Wang, H. et al. High-performance hydrogel sensors enabled multimodal and accurate human–machine interaction system for active rehabilitation. Adv. Mater. 36, 2309868 (2024).
Xiao, M. et al. Conformal bioadhesive hydrogel-based multimodal wristband for accurate, mobile, and real-time sign language translation and human-machine interactions. Adv. Funct. Mater. n/a(n/a): e22153 (2025).
Huang, X. et al. In situ forming dual-conductive hydrogels enable conformal, self-adhesive and antibacterial epidermal electrodes. Adv. Funct. Mater. 33, 2302846 (2023).
Yang, Z. et al. An on-skin-formed silk protein bioelectrode for conformable and robust electrophysiological interface. Adv. Funct. Mater. 34, 2402608 (2024).
Bai, Z. et al. Smart battery-free and wireless bioelectronic platform based on a nature-skin-derived organohydrogel for chronic wound diagnosis, assessment, and accelerated healing. Nano Energy 118, 108989 (2023).
McCool, P. et al. Improved pattern recognition classification accuracy for surface myoelectric signals using spectral enhancement. Biomed. Signal Process. Control 18, 61–68 (2015).
Acknowledgements
This study was supported by the Fundamental Research Funds for the Provincial Universities of Zhejiang (2023YW88), Zhejiang University Student Science and Technology Innovation Activity Plan (2025R409C055).
Author information
Authors and Affiliations
Contributions
Ziqing Yu: Conceptualization, Methodology, Formal analysis, Investigation, Writing – original draft. Yunqing Gu: Software, Data curation, Visualization, Writing – original draft. Yun Ren: Methodology, Software. Hongxing Ding: Data curation, Writing – original draft. Denghao Wu: Software, Writing – original draft. Zhenxing Wu: Methodology, Software. Jiegang Mou: Conceptualization, Resources, Writing – review & editing, Supervision, Project administration, Funding acquisition.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Ethical approval
License Statement Papers involving the use of human subjects were conducted in accordance with the ethical guidelines of the World Medical Association (Declaration of Helsinki) involving human experimentation.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Yu, Z., Gu, Y., Ren, Y. et al. Hydrogel-based electrodes for high-fidelity sEMG acquisition and robotic hand control. Microsyst Nanoeng 12, 107 (2026). https://doi.org/10.1038/s41378-026-01219-y
Received:
Revised:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41378-026-01219-y
