
Abstract
Aquatic animals are much better at underwater navigation than robotic vehicles. Robots face major challenges in deep water because of their limited access to global positioning signals and flow maps. These limitations, and the changing nature of water currents, support the use of reinforcement learning approaches, where the navigator learns through trial-and-error interactions with the flow environment. But is it feasible to learn underwater navigation in the agent’s Umwelt, without any land references? Here, we tasked an artificial swimmer with learning to reach a specific destination in unsteady flows by relying solely on egocentric observations, collected through on-board flow sensors in the agent’s body frame, with no reference to a geocentric inertial frame. We found that while sensing local flow velocities is sufficient for geocentric navigation, successful egocentric navigation requires additional information of local flow gradients. Importantly, egocentric navigation strategies obey rotational symmetry and are more robust in unfamiliar conditions and flows not experienced during training. Our work expands underwater robot-centric learning, helps explain why aquatic organisms have arrays of flow sensors that detect gradients, and provides physics-based guidelines for transfer learning of learned policies to unfamiliar and diverse flow environments.
Similar content being viewed by others

Introduction
Ocean monitoring is essential for understanding ecosystem functioning1, marine biodiversity2, and the ocean’s carbon cycle3, particularly in the face of our rapidly changing climate4,5. To expand the current capabilities of underwater robots for long-term ocean surveillance and monitoring4,6,7,8, we need effective control strategies that enable robotic swimmers to seamlessly navigate through shifting currents, much like biological swimmers9,10,11, using only on-board sensors. But is it feasible for robots to learn underwater navigation autonomously from an egocentric perspective without any land references?
Navigating underwater environments presents unique challenges because of the dynamic nature of flow currents and the absence of global positioning signals. The naive intuition that to reach a destination, it suffices to turn towards that destination and move in a straight line to reach it, may not be optimal or even feasible when the navigator experiences strong flow currents12. Planning trajectories using optimal control theory such as in Zermelo’s navigation problem requires detailed prior knowledge of the entire flow field and its time evolution13,14,15,16, information not readily available to an autonomous underwater navigator. Methods like adaptive control17,18 and model predictive control19,20 exist for motion planning in partially known flow fields, but fall short under limited flow information.
Reinforcement learning (RL) approaches—a suite of artificial intelligence algorithms that solve problems through trial and error21,22,23,24,25,26,27,28,29,30,31—are particularly suited to learning optimal navigation strategies by interacting directly with the flow environment. RL is already driving the next innovations in aerial and underwater locomotion32,33,34,35,36,37, navigation38,39, and trajectory tracking8,40,41. In RL, the agent, in either a simulated38,39,42 or physical8,33,43,44,45 flow environment, acts according to a control policy. The policy processes inputs, observations of the agent’s environment, to generate an action. This observation-to-action mapping is continuously refined through repeated interactions with the surrounding environment, guided by a predefined reward function to optimize the agent’s performance21.
But what environmental cues should the agent detect, or observe, to learn efficient underwater navigation? For inspiration and to explore potential solutions, it is reasonable to turn to aquatic organisms. Fish, for example, are thought to orient themselves using both geocentric and egocentric visual maps46, similar in their neural basis to those used by mammals and birds for spatial navigation47. Fish also possess an elaborate lateral line system that allows them to determine the direction and rate of water movement48,49. This flow sensing ability is important for evading predators50, homing51, and rheotaxis11,52,53. However, despite extensive laboratory and field studies, the sensory cues available and employed by fish for navigation remain an open problem53,54. This knowledge gap motivates us to explore the minimal sensory cues necessary for autonomous underwater navigation in fish and fish-like robots at the meter scale55. At this scale, the flow environment is characterized by long-lived coherent vortex structures56,57,58, distinct from the uniform turbulence experienced at smaller scales59,60.
We consider underwater swimmers characterized by two unique features: (1) the swimmer only senses instantaneous and local flow information, with no immediate, past, or future knowledge of spatial flow variations beyond its sensing range, and (2) the swimmer senses the flow in an egocentric frame, with no knowledge of a global flow direction or inertial frame of reference. Egocentrism here is more nuanced compared to its interpretation in studying how animals build visual maps of the physical space46: it implies that the agent has no awareness of an external frame of reference, and no information of its own position and orientation or the flow direction in such frame. The agent operates independently of a geocentric land-based coordinate system. This underwater navigator is different from existing studies where the agent knows the full velocity field12,42,61,62, or where the agent relies on inertial information, such as knowledge of the direction of gravity32,60, the agent’s location and orientation in a geocentric frame of reference8,38,42,61,62, or the global direction of an oncoming flow39.
The incorporation of these two features—egocentrism and locality of flow sensing—is quintessential for establishing a paradigm of underwater robotic learning grounded in the robot’s own sensory world, similar to the “Umwelt" concept in animal behavior63. This approach would allow robots to perceive, interact with, and learn from their environment based on their unique sensory inputs. This, in turn, would lead to more adaptive and autonomous behaviors and help overcome current limitations in learning that rely on geocentric observations8,38. Geocentric policies are not invariant to rotations and translations of the flow field and not suitable for autonomous deployment in the open ocean without continuous support from and communication with a terrestrial control center8.
In this study, we first investigate if an artificial agent interacting with a simulated flow environment can learn autonomously using egocentric flow observations without the extra support of a geocentric inertial reference. We find that, while sensing local flow speeds is sufficient for geocentric navigation, successful egocentric navigation requires additional information about local flow gradients. Then, we compare the adaptability of geocentric and egocentric navigators to unfamiliar flow environments. We find that, with the additional observation of local flow gradients, egocentric navigators are as successful in familiar environments and could be more robust under unfamiliar conditions. To elucidate the sensory cues the agent uses for decision-making, we map the agent’s trajectories from the physical space to the space of flow observations, and we employ tools from dynamical systems theory to explain the behavior of the trained RL policy in comparison to heuristic policies.
Our work paves the way towards truly autonomous underwater learning from a robot-centric perspective64, provides fresh insights into why aquatic animals possess a network of flow sensors (e.g., lateral line system of fish49,65 and array of whiskers of the harbor seal9) to detect local flow gradients, informs the design of optimal sensing and control strategies for future underwater robots53,66, and offers a gateway for transfer learning in new flow environments67. It also opens new avenues for future exploration of hybrid strategies that integrate egocentric and geocentric representations of the environment68,69,70,71.
Results
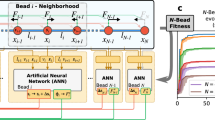
Consider the problem of an artificial swimmer tasked with navigating to a destination located across an unsteady wake (Fig. 1A). The wake consists of a trail of alternating-sign vortices generated by a freestream flow of speed U past a fixed cylinder of diameter D, which we simulated numerically using a computational fluid dynamics (CFD) solver (Methods, Supplementary Fig. 1,72,73,74). The swimmer, modeled as a self-propelled agent, is constrained to move at a constant speed V = 0.8U weaker than the freestream speed U.

A Unsteady flow generated by a uniform freestream flow U past a cylinder of diameter D at Re = 400. A swimmer moving at constant speed V = 0.8U must navigate the wake to reach the target (black star). Motion planning using time-optimal control (black trajectory) requires prior knowledge of the entire flow field and its time evolution. Flow and visual sensory cues in (B) a terrestrial geocentric frame (ex, ey) or (C) a body-fixed egocentric frame (t, n). D To navigate across unsteady flows, we train, using Deep RL, a swimmer that senses the ambient flow and target location locally.
This problem is challenging because when positioned outside the wake, the swimmer cannot overcome the flow; it drifts downstream. In Zermelo’s classic optimization problem, a swimmer in an overpowering uniform stream with control only over its heading direction can, at best, optimize its motion either to minimize the time it takes to travel a given distance across the stream or to minimize its downstream drift distance (Methods, Supplementary Fig. 2). To navigate to a target across an unsteady wake, the swimmer must follow three stages: enter the wake, slalom between vortices to exploit the weaker flows in the wake to swim upstream, and exit upstream of the target to ensure reaching it despite the stronger downstream current. These three stages—entering, zigzagging inside, and exiting the wake—universally characterize navigation across an unsteady wake; they arise in trajectories based on time-optimal control given full knowledge of the spatiotemporal evolution of the flow field, when the swimmer has direct control over its heading direction38 and when it has control only over the rotational rate at which it changes its heading direction (Fig. 1A). Slaloming inside the wake was reported in live fish negotiating unsteady wakes75 and is thought to endow fish with energetic benefits when swimming alone75 and in groups76,77; slaloming also emerges robustly in inanimate swimmers interacting with unsteady flows78,79,80,81.
Because full knowledge of the spatiotemporal evolution of the flow field is often unavailable for robotic or biological underwater navigators, it was demonstrated in ref. 38 that an optimal strategy for entering, zigzagging in, and exiting the wake can be learned using RL with only local and instantaneous observations of the flow velocity and relative position of the target—the agent has no memory of past states and makes no prediction of future states. The problem of navigating across unsteady wakes in strong currents is thus controllable and solvable with either full or partial observations of the flow field, as long as observations are provided in an inertial frame of reference. But is learning feasible in the agent’s Umwelt, from an egocentric perspective?
Distinguishing between egocentric and geocentric observations
To illustrate the difference between egocentric and geocentric sensing, consider the geocentric learning in ref. 38 where, to reach a target located across the unsteady wake, the policy relied on geocentric observations taken in an inertial frame of reference (ex, ey). In this inertial frame, the target is located at x⋆ ≡ (x⋆, y⋆). Geocentric observations consisted of (i) the local flow velocity u ≡ (u, v) measured at the location x ≡ (x, y) of the agent and (ii) the relative position Δx = x⋆ − x ≡ (Δx, Δy) of the target to the agent (Fig. 1B). Practically, to obtain these observations, the swimmer must first measure these quantities using on-board sensors in its own body-frame, say, (t, n) chosen to coincide with the swimmer’s heading t and transverse n directions (Fig. 1C). Basically, the agent must first observe, at its location, the longitudinal and transverse components (ub, vb) ≡ (u ⋅ t, u ⋅ n) of the fluid velocity u and the relative position (Δxb, Δyb) ≡ (Δx ⋅ t, Δx ⋅ n) of the target (Fig. 1C). Then, to transform these measurements into an inertial frame, the agent needs to know its own orientation θ, i.e., heading direction \({{\bf{t}}}\equiv (\cos \theta,\sin \theta )\), relative to the inertial frame (ex, ey), which usually means the assistance of a satellite, compass, or inertial measurement unit (Table 1). Additionally, to properly align the inertial frame relative to the freestream direction as done in ref. 38, the swimmer must know the freestream direction in advance, which is typically unavailable in underwater environments11,49,53,82.
In an equivalent egocentric set-up, the agent collects sensory observations directly in its body frame (t, n), with no prior knowledge of freestream direction and no dependence on terrestrial coordinates or inertial frame. Basically, the agent observes, at its location, the longitudinal and transverse flow components (ub, vb) and the relative position (Δxb, Δyb) of the target (Fig. 1C). It has no knowledge of its own orientation θ, which eliminates potential time delays and computations inherent to assessing inertial signals8,83. Thus, if amenable to learning in underwater environments, egocentric observations would at once be less demanding in terms of sensory requirements and offer greater flexibility in underwater environments where obtaining and communicating external sensory data to the agent is unfeasible.
We formulated the learning problem such that, given a set of observations o, the policy π(a∣o) outputs an action a aimed to guide the artificial agent to a target location across the wake (Fig. 1D, Methods). To reflect practical limitations on motion steering in biological and robotic systems39,84,85, we considered the agent’s action a to control the rate of change \(\dot{\theta }\) of its heading direction; the agent has no direct control over its heading angle θ. The policy \(\pi (\dot{\theta }| o)\) is learned by maximizing, through repeated interactions with the environment, a cumulative reward composed of a sparse reward given once the swimmer reaches the target and a dense reward given at every timestep equal to the negative change in distance to the target. Each training episode is initiated by randomly positioning the target (x*, y*) inside a circular region at one side of the wake and the agent (xo, yo) inside an equally-sized circular region at the opposite side of the wake and pointing in a random orientation θo (Fig. 1A). Training is initialized at a random time, i.e., phase, to relative to the wake evolution.
Egocentric learning requires sensing flow gradients
To assess the advantages and limitations of geocentric versus egocentric sensing, we asked, in the same fluid environment, which set of observations facilitates learning the task of navigating across the unsteady wake with no prior knowledge of the fluid environment.
Starting from the same set of geocentric observations o = (Δx, Δy, u, v) employed in ref. 38, the swimmer failed to learn the navigation task. In ref. 38, the swimmer learned successfully because it had direct control over its heading angle θ. To remedy this, and because these geocentric observations require implicit knowledge of the swimmer’s heading angle θ in inertial frame, we allowed the swimmer to explicitly observe θ, thus augmenting the geocentric observations to o = (Δx, Δy, θ, u, v) (Table 1). The policy converged in each of the 17 training sessions we conducted, with some variation in reward (Fig. 2A, Supplementary Table 1). To highlight the importance of flow sensing, we trained a flow-blind swimmer that observed only its own orientation and relative position to the target (Δx, Δy, θ). The flow-blind swimmer failed to reach the target (Fig. 2A), performing worse than the flow-blind swimmer in38 because of the different actions (\(\dot{\theta }\) versus θ) taken by the agents.

We trained RL policies with geocentric and egocentric observations in two flow environments: high-fidelity CFD simulations and a von Kármán vortex street (VS) model. All policies underwent training of equal length (2 × 107 timesteps for CFD and 0.5 × 107 timesteps for VS). Learning curves represent the moving mean of cumulative rewards per episode, calculated over a window of 500 episodes. A Geocentric observations: sensing (Δx, Δy, θ) only, the flow-blind agent failed to learn in six instances of learning. Adding flow sensing abilities (u, v), the agent learned to navigate in CFD wake in all 17 instances of learning. Training in VS wake with the same observations succeeded in all four instances, with faster convergence. B Egocentric observations: sensing (Δxb, Δyb, ub, vb) only, the agent failed in CFD wake in all 10 instances of learning. Adding local flow gradients (n ⋅ ∇ ub, n ⋅ ∇ vb) resulted in successful learning in all 16 instances of learning in the CFD wake and 4 instances of learning in the VS wake. Success rate of (C) geocentric and (D) egocentric agents for each of the trained policies are evaluated over a distribution of 1000 randomly generated test conditions (Supplementary Fig. 4). The larger variance of success rates in CFD compared to VS wakes reflects that CFD flows are more challenging to navigate. Additional training with entire domain for initialization and training in CFD wake at Re = 1000 is provided in Supplementary Fig. 3.
We next trained the swimmer using the same set of observations taken in body frame o = (Δxb, Δyb, ub, vb). This flow-limited swimmer failed to learn (Fig. 2B). When, in addition, we provided the swimmer with the ability to sense the transverse flow gradient (n ⋅ ∇ ub, n ⋅ ∇ vb), that is, when considering an augmented set of six egocentric observations o = (Δxb, Δyb, ub, vb, n ⋅ ∇ ub, n ⋅ ∇ vb), the policy converged in each of the 16 training sessions, reaching equally high reward as the geocentric policy (Fig. 2B). Egocentric learning is also possible when augmenting the local observations to sense the longitudinal flow gradients t ⋅ ∇ ub and t ⋅ ∇ vb in the direction of motion of the agent (Supplementary Table 1). Sensing flow gradients is thus essential for autonomous underwater navigation in unsteady environments.
To further substantiate our conclusion that sensing flow gradients at the swimmer’s scale is necessary for egocentric point-to-point navigation in coherent flows, we repeated our reinforcement learning methodology using a different model of the fluid environment. Namely, we emulated the CFD wake using a well-known inviscid vortex street (VS) model consisting of two infinite rows of equal-strength, opposite-sign point vortices79,81,86 (Methods, Supplementary Fig. 1). Training in this reduced order representation of the flow field, we arrived at the same result: egocentric learning is not possible without the additional observations of either longitudinal or transverse flow gradients.
Training sessions in the VS environment converged faster than in the CFD environment (Fig. 2A, B), with similar convergence trends across multiple training sessions: the geocentric policy learned faster while the egocentric policy was capable of reaching equally high rewards but with slightly larger training variance and longer convergence time.
The trained agent, whether using geocentric or egocentric observations and whether trained in CFD or VS wake, followed the three stereotypical stages of navigation across an unsteady wake in strong currents: entering the wake, slaloming between vortices to swim upstream, and exiting the wake upstream of the target (Fig. 3, Supplementary Movie 1,38). In Fig. 3, we also plotted the corresponding trajectories in the flow observation sub-spaces (u, v) for the geocentric agent and (ub, vb) and (n ⋅ ∇ ub, n ⋅ ∇ vb) for the egocentric agent. To distinguish the flow sensing cues in each of the three stages of navigation, we highlighted the wake entry, zigzag within, and exit stages.

Trajectories are shown in black (geocentric) and blue (egocentric) for the same initial conditions and target location. A Geocentric and (B) egocentric agents, trained in CFD wake at Re = 400, learn to enter, slalom inside, and exit the wake. Agents trained in the reduced VS flow representation succeed when tested in (C, D) VS wake and (E, F) CFD wake (Supplementary Movies 1 and 2). Corresponding trajectories in the spaces of flow observations are shown in the right panels of (A, C, E) and (B, D, F) for the geocentric and egocentric agents, respectively. The three stages of navigation are marked using dark red for wake entry, dark blue for wake exit, black (geocentric), and light blue (egocentric) for slaloming inside the wake.
Upstream motions require the agent’s velocity in the upstream direction \(\dot{{{\bf{x}}}}\cdot {{{\bf{e}}}}_{x}={{{\bf{e}}}}_{x}\cdot ({{\bf{u}}}+V{{\bf{t}}})\) to be positive. This streamwise velocity can only be positive when the agent is within the wake. For the geocentric agent with direct access to u = ex ⋅ u, it suffices that u + V ≥ 0 be non-negative for the agent to unambiguously determine that it is inside the wake. Indeed, as the geocentric agent slalomed between vortices in the physical space, its motion followed periodic oscillations in the observation space for which u + V ≥ 0, reflecting that the geocentric agent learned the sensory cues u + V ≥ 0 to stay inside the wake and move upstream (Fig. 3A, C).
The egocentric agent also learned to enter the wake and change direction to stay in the wake to satisfy \(\dot{{{\bf{x}}}}\cdot {{\bf{t}}}={u}_{b}+V\ge 0\) (Fig. 3B, D), but this condition alone does not guarantee upstream motion nor that the agent is located within the wake. For example, the agent’s initial location outside the wake and pointing downstream also satisfies this condition. Therefore, the agent needs additional observations of flow gradients to determine when it is inside the wake. To further support this claim, we repeated the egocentric training with the agent tasked to swim in the upstream direction, with no specific target position, starting from initial locations inside the wake. The agent failed to learn by observing only fluid velocities (ub, vb) without additional observations of flow gradients such as (n ⋅ ∇ ub, n ⋅ ∇ vb) or (t ⋅ ∇ ub, t ⋅ ∇ vb) or both.
Next, in Fig. 4, we considered the same 1000 test cases that we employed in Fig. 2, counted the cases that reached each target, and interpolated the success rate over a regular grid spanning the target training domain. The policies trained and tested in the same wake, whether in CFD or VS, achieved nearly 100% success, consistent with Fig. 2C, D. In Fig. 4, we plotted, for all 1000 test cases, the probability density function (p.d.f.) of encountering a set of flow observations as colormaps on observation subspace (u, v) for the geocentric agent and subspaces (ub, vb) and (n ⋅ ∇ ub, n ⋅ ∇ vb) for the egocentric agent. The biggest difference appeared in the egocentric observations of velocity gradient—the CFD wake offered much richer signals of transverse flow gradients, while the gradients in the VS wake were more concentrated. These flow gradients are essential for an egocentric navigator to differentiate its location within or outside the wake.

Geocentric and egocentric agents trained and tested in (A, B) CFD wake at Re = 400, (C, D) VS wake, and (E, F) trained in VS and tested in CFD wake. Green colormap shows the success in reaching a target based on the 1000 random test cases (Supplementary Fig. 4); sample trajectories from Fig. 3 are superimposed; red (flow velocity) and gray (velocity gradient) colormaps show the probability density function (p.d.f.) of flow observations for all 1000 test cases. P.d.f. plots of observations of relative target locations are provided in Supplementary Fig. 6.
To further highlight the complexity of the navigation task that the RL policies are trained to learn, we compared the RL policies to two naive policies: an optimal control policy arrived at by assuming a uniform flow everywhere (Supplementary Fig. 2C) and a flow-blind strategy where the agent turns towards the target with no knowledge at all of the flow (Supplementary Fig. 2D). These naive policies fail everywhere in reaching the target across the unsteady flow. They experience limited success in reaching the target from upstream locations, where the background flow facilitates the agent’s motion toward a downstream target.
Lastly, we compared the geocentric and egocentric RL policies, and total time they take to reach the target, to those obtained using optimal control theory (Fig. 1A). The RL agents, following only instantaneous and local observations, take similar amount of time to reach the target, tracing nearly identical trajectories to the time-optimal trajectory obtained with knowledge of the spatiotemporal evolution of the entire flow field (Methods, Supplementary Fig. 4). In addition to limited sensory requirements, a major advantage of the RL agents over the classic optimal control is their robustness to initial and target locations; the optimal trajectory fails at the slightest perturbations to agent or target, requiring to restart the optimization process. The RL agents succeed everywhere in the training domain and are generalizable beyond the training conditions as discussed next.
Transfer of RL policies to unfamiliar flow environments
We tested the geocentric and egocentric policies under superimposed rotations to the entire flow field, thus introducing a misalignment between the wake direction and the inertial frame. Specifically, we gradually rotated the CFD wake relative to the inertial frame (ex, ey), and at each degree of misalignment between the wake and the inertial frame, we tested the performance of the trained agent considering initial conditions and target locations in the same domains relative to the wake as those explored during training (Fig. 5A, B, Supplementary Movie 1). The performance of the geocentric policy degraded rapidly with increasing misalignment between the wake and the reference frame, while the egocentric policy, by construction, maintained its high performance at any degree of misalignment. These results demonstrate that the egocentric policy is rotationally symmetric—that is, invariant to the absolute orientation of the wake—while the geocentric policy requires a priori knowledge of the alignment between the wake and the inertial frame. Invariance to rotations and successfully reaching the target irrespective of the direction of the unsteady currents is a major advantage of egocentric learning; in geocentric learning, an incorrect estimate or a change in flow direction would require a re-training of the policy.

A Agents trained at Re = 400 and tested in the same wake under -30∘ misalignment between the wake and inertial frame: geocentric agent fails where the egocentric agent succeeds (Supplementary Movies 1). B With increasing misalignment, the success rate of the geocentric agent quickly drops to nearly zero; whereas the performance of the egocentric agent is invariant to such rotations. Geocentric and egocentric agents trained at Re = 400 succeed when tested at (C) Re = 200 and (D) Re = 1000 (Supplementary Movies 2). E Success rates of geocentric and egocentric agents trained in CFD wake at Re = 400 and tested across a range of Reynolds numbers are summarized using box plots, where the median, lower, and upper quartiles are indicated with horizontal bars, and outliers are marked by “×”. All 17 geocentric and 16 egocentric policies are included, each tested over 1000 test cases. P.d.f. plots of visual and flow observations collected at Re = 200, 400, and 1000 are provided in Supplementary Fig. 7. Agents trained at Re = 1000 succeed when tested at (F) Re = 1000 and (G) Re = 600. H Success rates of geocentric and egocentric agents trained in CFD wake at Re = 1000 and tested across a range of Reynolds numbers are summarized using the same box plot convention as in (C). All 5 geocentric and 5 egocentric policies are included, each tested over 1000 test cases. In (E, H) to evaluate the difference in performance between the egocentric and geocentric policies, a two-sample t-test is used119,120. The null hypothesis states that there is no significant difference in success rates. A smaller p-value indicates stronger evidence against the null hypothesis, suggesting a more significant difference in performance. * p < 0.05, ** p < 0.01, *** p < 0.001.
We next probed the limitations of transfer learning across distinct flow fields. We performed these tests with the reference frame properly aligned with the wake. In Fig. 3C, we tested the RL policies trained in VS wake when placed in the CFD wake. Remarkably, both geocentric and egocentric policies succeeded in entering the wake, zigzagging between vortices to swim upstream, and even exiting the wake at an appropriate time and location. With the egocentric policy, after the swimmer missed the target by a small distance on its first attempt, it swam back into the wake, and continued to navigate upstream (Supplementary Movie 2). This remarkable adaptive behavior shows that egocentric policies are resilient and robust to perturbations and has two important implications for applying transfer learning techniques in underwater environments67. First, it shows that the agent continues to perform reliably in unseen environments and avoids actions that put it at risk87,88. Importantly, it allows the agent to continue to collect and update its observations, which is a key factor in the success of transfer learning89. These findings will open new opportunities for bridging the gap between simulations and real environments44,67 using lifelong learning algorithms90.
To investigate the broader applicability of these results, we tested the VS-trained policy in the CFD wake using all 1000 test cases (Fig. 4C). The geocentric policy outperformed the egocentric policy because the latter had difficulties reaching targets further away from the wake of the first approach. This difficulty is due to inaccuracy in the exit conditions. But even when the agent missed the target, it re-entered the wake and tried again (Fig. 3C, Supplementary Movie 2). The analysis in observation space (Fig. 4C) emphasizes that aspects of the task, such as entering and zigzagging between vortices, are more robust to transfer from low to high-fidelity flows while exiting the wake is more sensitive to flow gradients. Therefore, a divide-and-conquer approach, say using curriculum learning91,92, may optimize transfer learning in underwater navigation by breaking up the policy into sub-tasks and focusing on improving the most challenging aspect (here accurate exit conditions) in higher-fidelity flow environments93.
We next tested the policies learned in CFD at Re = 400 in CFD wakes, ranging from Re = 200 to 1000 not seen during training. In Fig. 5C, D, we show sample trajectories at Re = 200 and 1000. Both geocentric and egocentric policies succeeded, albeit with some struggle at higher Re where the vortex wake became unstable. In Fig. 5E, we report the performance of all policies trained in CFD (Re = 400) as Re number varied. Namely, we tested each of the 17 geocentric and 16 egocentric policies on the 1000 random cases at each of the six values of Re, a total of 198,000 tests. We found that at lower Reynolds numbers (Re = 200, 300), egocentric policies generalized better in a statistically-significant manner. At higher Reynolds numbers, the performance of both geocentric and geocentric policies declined, and the difference in success rate between the two became less significant statistically. The inability of both egocentric and geocentric policies to keep up with flows at higher Re is caused by the changing nature of the wake: at lower Re, the downstream wake is stable, but at higher Re, the wake loses stability94, as evident by the cross-stream motion of the vortices in Fig. 5D, introducing novel physical challenges to deal with. Notwithstanding the changing flow physics, the gradual degradation of performance with Re (Fig. 5E) suggests ample opportunity for updating the learned policy as Re increases using lifelong learning90.
The likelihood of flow observations based on all tests at Re = 200, Re = 400, and Re = 1000 exhibited similar features, with periodic oscillations in the space of flow observations reflecting the zigzagging motion of the agent inside the wake (Fig. 4). However, the magnitude of flow signals differed with Re number. Transfer from Re = 400 to Re = 200, although the flow character remains unchanged, means transfer to weaker flows and requires interpolation of flow observations acquired during training. Transfer to higher Re means stronger flows, with distinct character, and requires extrapolation of flow observations, which is notoriously difficult for learning-based models95. Consideration of the physics of the flow environment is thus of paramount importance in assessing the limitations of transfer learning to unfamiliar flows.
To further assess the effects of the flow field in which the agents are trained on transfer to novel flows, we next trained both geocentric and egocentric policies at Re = 1000. For each set of observations, we repeated the training five times. Both policies successfully converged in all instances of training, demonstrating that RL training is possible in diverse flow regimes (Fig. 5F and Supplementary Fig. 3). Interestingly, trajectories of the policies trained and tested at Re = 1000 are similar to the trajectory of the egocentric policy trained at Re = 400 and tested at Re = 1000, indicating that, when successful, the trajectory of the transferred egocentric policy was time-optimal in the new environment (Fig. 5). For each of the 10 training instances at Re = 1000, we systematically tested the resulting policy on the 1000 random cases at each of the six values of Re, a total of 60,000 tests (Fig. 5H). At Re = 1000, geocentric and egocentric policies succeeded almost surely. As Re decreased, success rates declined gently at first, and more steeply below Re = 600. At Re = 600, egocentric policies outperformed geocentric policies; see Fig. 5G for sample trajectories at Re = 600 illustrating failure of the geocentric policy in reaching the target, where the egocentric policy succeeds under the same conditions. At even lower Re, both policies failed (Fig. 5H). Taken together, the results in Fig. 5E, H show that both egocentric and geocentric policies successfully transfer to new flows at Re values close to those used during training, but struggle to adapt when the change in Re induces substantial changes in the nature of the wake. In particular, transfer from higher to lower Re favors egocentric policies, and success of transfer to novel flows is asymmetric: it depends on the nature of the training flow.
Transfer of RL policies to conditions unseen during training
We probed the performance of both egocentric and geocentric navigators when subjected to novel conditions unexplored during training. In Fig. 6A, B, we tested the behavior of both policies starting at locations upstream of the target. The agent with geocentric observations failed immediately and headed outside the wake. The egocentric agent performed better; it initially turned toward the target, and when it missed, it went back into the wake, zigzagged through the vortices, and exited the wake to locate the target. This remarkable robustness to new conditions is a hallmark of egocentric policies; it emphasizes that the policy itself acts as a resilient feedback controller with built-in redundancy that ensures functionality even in the event of failure. When placed downstream of the target (Fig. 3C), both egocentric and geocentric policies performed well at moderate downstream locations, but further downstream, the egocentric policy failed first. The failure occurred despite the agent’s attempt to enter the wake and engage with the vortices (Supplementary Movie 3).

A Geocentric and (B) egocentric agents starting from initial conditions unseen during training: geocentric agents fail upstream of the target location but outperform egocentric agents downstream of the target (Supplementary Movie 3). Success rates and consumed time of (C, E) geocentric and (D, F) egocentric agents reaching a fixed target (*) starting anywhere in the wake (Green colormap) with 100% success of both policies within the training domain (black circle), 58% and 66% in favor of egocentric policy outside the training domain, and overall 60% and 68% success across the entire domain. Both policies fail downstream: solid lines marking failure of the geocentric policy align with the direction of the “time-optimal” strategy (Supplementary Fig. 2A) and those of the egocentric policy align with the direction of the “drift-optimal” strategy (Supplementary Fig. 2B). The field of “preferred orientations” defined by the stable fixed points of the average policy for (G) geocentric and (H) egocentric agents explains the behavior of the trained agent inside and outside the training domain. Preferred orientations that align with time-optimal and drift-optimal strategies are highlighted in green and orange, respectively.
We systematically challenged the swimmer to reach a fixed target located at the center of the training domain starting from any initial position in the flow field, including at locations unexplored during training (Fig. 6). To standardize these tests, we initialized the agent’s position on a regular grid over the entire fluid domain and, at each grid point, we initialized the agent orientation using 36 distinct initial orientations evenly distributed from 0 to 360∘. We fixed the initial phase to of the flow. In total, we performed 34,020 test cases per policy. As expected, both geocentric and egocentric policies almost surely succeeded when starting within the training domain (Fig. 6C, D). The egocentric policy generalized better upstream of the training domain (90% success of egocentric policy versus 55% success of geocentric policy). The geocentric policy performed better at downstream locations (63% success of geocentric policy versus 47% success of egocentric policy), but both policies reached a limit beyond which they failed (straight gray lines in Fig. 6C, D). Failure downstream of the training domain occurred before physical limitations due to viscous decay of the vortex structures were reached, reflecting the limitations of the policies themselves. We return to this point later.
In addition to the success rate, we systematically evaluated the average time that successful trajectories spent to reach the target (Fig. 6E, F). On average, the geocentric navigator spent slightly less time than the egocentric navigator; namely, the geocentric agent was on average 8% faster than the egocentric agent when starting inside the training domain, but the difference was negligible, less than 1.5%, outside the training domain; the average total time to reach the target being nearly 23 (geocentric) and 25 (egocentric) in units of D/U inside the training domain versus 35 (geocentric) and 35.4 (egocentric) outside the training domain.
Interpretation of underwater RL policies
Intuitively, when placed directly upstream of the target, we expect even a naive navigator that orients toward the target, ignoring entirely the flow field, to reach the target simply by drifting downstream (Supplementary Fig. 2D, Methods). A slightly savvier navigator, aware of only the background uniform flow U could exploit this flow to reach the target from a broader range of upstream locations (Supplementary Fig. 2C, Methods). But the geocentric policy has no such “intuition” of the flow. Its failure at upstream locations is due to policy limitations. When collecting observations in an inertial frame, upstream situations are novel to the policy. The egocentric agent performs better because the self-centric view of the flow and target provides a richer set of observations.
Far downstream, we expect flow physics to impose limits on what is achievable by even the savviest agent. Vortices decay downstream. This viscous diffusion is best illustrated in flow physics using the Oseen solution where an initially concentrated vortex decays spatially due to viscosity (Supplementary Fig. 5). Far downstream, the wake’s streamwise velocity u approaches the freestream velocity U and the flow exhibits weaker gradients, prohibiting the swimmer from exploiting the wake to move upstream. We thus expect the performance of both policies to deteriorate as the vortex intensity decreases (Supplementary Fig. 5), with a faster drop in the performance of the egocentric policy because it relies on flow gradients to navigate and is thus more disadvantaged in flows with weaker gradients.
To elucidate the reasons for the disparity in performance between geocentric and egocentric policies, we analyzed these policies using tools from dynamical systems theory35,96,97,98. From the dynamical systems perspective, the average policy defines a deterministic function \(\dot{\theta }=\pi (o)\), and this averaged rotational dynamics forms a “dynamical flow field” over the phase space of action and observations. This is a high-dimensional space that prohibits direct visualization of the policy and complicates the analysis of its stability and convergence to the target position35,98. Luckily, at a given location (x, y) and phase t, the observations depend on the agent’s heading direction, and the average policy can be viewed as a dynamical system \(\dot{\theta }=\pi (o(\theta ))\) over the phase space \((\theta,\dot{\theta })\). We thus defined the field of preferred direction θp as follows: of all potential orientations θ at a given location (x, y) and phase t, the preferred direction is a stable equilibrium of the dynamical system \(\dot{\theta }=\pi (o(\theta ))\) for which the average policy \(\dot{\theta }=\pi (o(\theta ))=0\) vanishes and its derivative with respect to θ is negative \(\partial \dot{\theta }/\partial \theta \, < \, 0\) (Fig. 6G, inset).
In Fig. 6G, H, we plotted the preferred directions over the entire domain for the geocentric and egocentric policies. Locations with multiple arrows imply multiple preferred directions. The generalizability of the egocentric policy upstream of the target (Fig. 6D) correlates with its tendency to have multiple preferred directions at these locations, increasing the chance of taking a correct action. In contrast, at these locations, the geocentric policy instructs the agent to confidently take action towards a single preferred direction that does not lead to the target (Fig. 6C, E), exhibiting a worst-case scenario in decision-making. This explains why the geocentric policy behaves much worse than the naive policy at upstream locations.
Downstream and outside the wake, the geocentric policy tries to minimize either the downstream drift (Fig. 6G, orange arrows), the time to reach the wake (Fig. 6G, green arrows), or a trade-off between both. The egocentric policy mostly instructs the agent to move into the wake while minimizing downstream drift (Fig. 6H). Downstream and inside the wake, however, preferred directions of the geocentric policy clearly favor upstream motion (Fig. 6G), while the egocentric policy exhibits multiple preferred directions that confuse the agent and lead to failure (Fig. 6H). This explains why the performance of the egocentric policy deteriorates faster than that of the geocentric policy at downstream locations. The ability of the geocentric policy to unambiguously favor upstream directions inside the wake can be attributed to the fact that it has knowledge of the agent’s orientation relative to the orientation of the wake (through the a priori knowledge of the wake alignment with the inertial frame (ex, ey) and the agent’s observation θ), whereas the egocentric policy doesn’t. In a direct comparison of the trajectories in Fig. 6A, B to the vector field of preferred directions in Fig. 6G, H, it is clear even when the egocentric agent is initially placed at a location with an unambiguous preferred direction and tries to enter and engage with the wake, failure occurs as the agent moves into locations with multiple preferred directions.
This analysis has several important implications. It shows that ambiguity in the preferred direction is favorable when flow physics acts in concert with the desired task (upstream locations), but ambiguity is detrimental when flow physics challenges the desired task (downstream locations). It also shows that the application of tools rooted in dynamical systems theory unveils promising paths for evaluating and interpreting the behavior of machine-learned policies.
Expanding the training conditions: when more is less
Could the agent perform better when trained over the entire flow domain? To address this question, we trained both geocentric and egocentric navigators by sampling initial conditions over the entire flow domain while keeping the target location within the same circular domain as before and systematically analyzed the converged policies using the tools presented in Fig. 6 (Supplementary Figs. 3 and 8). Surprisingly, compared to the policies trained by sampling over the limited set of initial conditions, both geocentric and egocentric agents performed worse when trained over the entire domain. Although trained by sampling over the entire domain, the policies hardly learned to navigate across the vortical wake and were successful only over a limited set of initial locations upstream of the target, with the egocentric policy exhibiting marginally better success rates, and both policies requiring, on average, the same overall time to reach the target. These results underscore that more is not always better. They point to an important fact that hinders learning when expanding the training domain: because when starting upstream from the target, it is relatively easy to reach the target even for a naive agent, the agent quickly learns this policy and gets trapped in a local optimum, which prevents it from continuing to improve itself when exposed to more challenging initial conditions. This pitfall affects both geocentric and egocentric navigators equally. The training domain employed in Fig. 1 represents one of the most difficult, yet physically achievable, scenarios for crossing an unsteady wake.
Lastly, we returned to the egocentric policy trained over the smaller domains of initial and target locations introduced in Fig. 1. We asked how would the RL policy be affected when limiting the observations of the target location to only the angular position of the target relative to the agent, without giving the agent any information about its actual distance to the target. Visually, it is easier to perceive the angular location of an object than its distance, because smaller objects that are close are indistinguishable from larger objects that are far99,100,101. Thus, instead of (Δxb, Δyb), we trained an egocentric RL policy using a single angular observation \(\arctan (\Delta {y}_{b}/\Delta {x}_{b})\). We tested the performance of the so-trained policy both inside and outside the training domain (Supplementary Fig. 9). Compared to the egocentric policy with full knowledge of the target position, the policy with only partial knowledge of the target heading performed worse when tested inside the training domain, but, surprisingly, it generalized better when tested starting at novel locations not observed during training. Outside the training domain, the success rate of the egocentric policy with full knowledge of the target position was 56.54%, while that of the egocentric policy with only knowledge of the angular position of the target succeeded at 79.30% rate. These results emphasize that failure farther downstream from the training domain is a persistent feature of the RL egocentric policy, independent of the wake representation, CFD simulations (Fig. 6D) or vortex street (Supplementary Fig. 9A), reflecting an inherent difficulty in the task itself. But, more importantly, these results demonstrate that the ability of the agent to transfer its experience during training to novel challenging situations depends on the nature of the observations: a choice that ensures a wider variety of observations are encountered during training generalizes better to unseen situations. These surprising results underscore the importance of the choice of the training domain and observations in designing generalizable and robust underwater navigation policies.
Discussion
We investigated a fundamental problem of underwater navigation within a flow regime of direct relevance to medium-scale robotic underwater vehicles55. At these scales, underwater navigation often involves interactions with unsteady wakes of persistent and coherent vortex structures at intermediate Reynolds number, presenting unique challenges distinct from those faced by millimeter-scale organisms navigating turbulent flows39,60,102. Learning to enter, slalom within, or exit such coherent flows is thus essential for any underwater robotic mission involved in ocean exploration and surveillance8,38,44,103. We analyzed, using a combination of physics-based simulations and reinforcement learning methods, the feasibility of robot-centric learning in such flow environments. Unlike existing learning studies that require inertial observations8,38, say with the help of a satellite, or continuous measurements of a global direction of gravity60 or wind39, in robot-centric learning, observations are collected in the robot’s own world, through on-board sensors, without a priori or acquired knowledge of a global flow direction or inertial frame of reference.
Our study demonstrated that (1) learning underwater navigation from a robot-centric perspective is feasible provided that the robotic agent senses local flow velocities and local flow gradients; (2) robot-centric policies respect physical symmetries and are invariant to flow rotations; (3) robot-centric policies exhibit adaptive behavior in unknown environments, allowing the robot to re-enter the wake and try again when missing the target, and (4) robot-centric policies facilitate transfer learning from reduced to high-fidelity flow environments and between different Reynolds number flows.
Our analysis of the sensory requirements for autonomous underwater navigation (Table 1) indicates that egocentric sensing in the agent’s own world eliminates potential time delays and computations inherent to assessing inertial signals8,83 at the expense of requiring more sensors to observe spatial variations in the flow field at the scale of the navigator. We envision that, to learn more complex and diverse navigation tasks in future underwater8,44 and aerial33,104 robotic applications, flow gradients measured at multiple locations and directions53,105, using a distributed array of flow sensors57 along the swimmer, and supplemented by the ability to remember and update a history of flow observations39,57,58,102 might be necessary. These directions will be investigated in future work.
In addition to its implications for robotic systems, our study opens avenues for understanding the link between flow sensing and behavior in biological systems39,106. To connect with biological solutions, it is crucial to recognize that flow and spatial representations are inherently shaped by the ecological system and the organism’s morphology and brain structure107. For example, in plankton—millimeter scale organisms that drift in water currents—many can swim, detect flow velocity gradients, and sense light or gravity to move upward to nutrient-rich surface waters at night and downward to avoid visual predators during the day108,109,110. The environmental cues and navigation mechanisms that enable planktonic vertical migration in turbulent waters60 are inherently distinct from those employed by a fish-inspired robotic agent navigating a coherent flow field created by a conspecific or predator38,44,77,111. Aquatic organisms that interact with coherent vortex structures have bilateral arrays of flow sensors suited for computing flow gradients49,53, e.g., fish lateral line system65,112,113 and harbor seal whiskers9. The methods we propose here offer an exciting opportunity for future studies that unravel how flow-sensing abilities in aquatic organisms have been shaped, not only by the size and morphology of the organism, but also by the flow environment it navigates.
Taken together, our work establishes promising directions for learning, from a robot-centric perspective, in dynamically changing physical environments, provides systematic analyses particularly suited for bridging the gap between simulations and real-world environments, and opens avenues for future investigation of the mapping between environmental conditions and sensory requirements in biological and robotic systems.
Methods
Flow field models
We considered a cylinder of diameter D fixed in a background flow of uniform velocity U, traveling from right to left. The cylinder diameter D and the freestream speed U are used as characteristic length and speed, respectively. The spatial-temporal evolution of the flow field is governed by the incompressible Navier-Stokes equations, given in dimensionless form as
where u(x, y, t) = (u(x, y, t), v(x, y, t)) denotes the flow velocity field as a function of space and time, and p(x, y, t) is the pressure field. Here, Re = DU/ν is the Reynolds number, where ν denotes the kinematics viscosity of the fluid. We impose a uniform-velocity inlet on the right boundary and no-slip boundary conditions on the surface of the cylinder. The flow field is solved with IBAMR, an open-source implementation of the immersed boundary method73,74,114,115. We chose a [−24, 8] × [−8, 8] rectangular computational domain, with the cylinder centered at the origin (0, 0). The coarsest Eulerian is a uniform 128 × 64 Cartesian grid, with three layers of adaptive Eulerian mesh refining it; the refinement ratio between two layers is 4; the refinement region is based on both the solid boundary and vorticity. The simulation time step is Δt = 2 × 10−4. In Supplemantary Fig. S1A is a depiction of the wake at Re = 400, where the resultant Strouhal number St = fD/U = 0.22 is consistent with past experimental measurements116. We additionally simulated a series of cylinder flows at Reynolds numbers ranging from 200 to 1000.
To simplify the simulation environment, we used a reduced-order inviscid model of the von Kármán vortex street, consisting of two infinite rows of equal-strength Γ, but opposite-sign, point vortices, at lateral offset 2A and wavelength λ86. The flow field u(x, y, t) ≡ (u, v) can be analytically described by in complex notation z = x + iy and w = u − iv,
Here, Us is the moving velocity of the vortex street as the superposition of its self-induced constant velocity (to the right) and the freestream flow velocity U (to the left),
In Supplemantary Fig. S.1B, we chose λ = 4D, A = 0.2D, Γ = 3UD to emulate the high-fidelity wake at Re = 400. We regularized the flow near the point vortex singularities to avoid unreasonably large velocities at the vortex location.
Optimization problem
Zermelo problem considers a swimmer moving at constant velocity V crossing a river of uniform speed U of width H12. Here, we considered V < U and let \({{\bf{t}}}=(\cos \theta,\sin \theta )\) be the swimmer’s heading direction, with θ the angle between the heading of the swimmer and the flow direction. Given this setup, the course velocity of the swimmer is \((-U+V\cos \theta,V\sin \theta )\). Thus, the time required for crossing the river is \(H/(V\sin \theta )\), and the streamwise drift distance is \(H(U-V\cos \theta )/(V\sin \theta )\). The orientation θ can be optimized to minimize either the time or the streamwise drift (Supplementary Fig. 2A, B),
Consider now point-to-point navigation in the same uniform flow u ≡ (−U, 0) such that the swimmer with velocity V and heading \({{\bf{t}}}=(\cos \theta,\sin \theta )\) needs to navigate to a target located at Δx = (Δx, Δy) relative its own position. An optimal strategy for minimizing the total time to reach the target consists of choosing a constant heading direction,
This equation has no solution when \(\left\vert \frac{U\Delta y}{V\sqrt{\Delta {x}^{2}+\Delta {y}^{2}}}\right\vert > 1\).
For navigating across an unsteady wake with associated velocity field u(x, y, t), we formulated a constraint optimization problem, given full knowledge of the vector field u. The optimization problem is to find the optimal rate of change \(\Omega=\dot{\theta }\) that minimizes the overall time of travel \({{\mathcal{J}}}\)
subject to the equality constraints
We discretized this problem and used collocation methods to numerically solve for optimal rate of change of heading directions \({\dot{\theta }}_{{{\rm{opt}}}}(t)\) that guide the swimmer to the desired destination across the unsteady wake; this is in contrast to ref. 38, where they directly optimized the heading direction θ(t). The optimization problem is solved using the function fmincon in MATLAB.
Model-free deep reinforcement learning
For navigating across an unsteady wake, we trained the artificial agent using Deep RL to maximize a cumulative reward through repeated experiences with the surrounding environment. The reward was composed of two parts: a sparse reward of 200D given as a completion bonus once the swimmer reached within 0.15D from the target, and a dense reward offered at every timestep equal to the change in distance between the swimmer and the target. Swimmers that exited the simulation domain, collided with the cylinder, or exceeded a maximum completion time were treated as unsuccessful. The RL algorithm maximized the return, which is the cumulative discounted reward with discount factor γ = 0.995.
Here, time is implicitly minimized during training because of the structure of the return Rt, or objective function as the discounted reward at the initial state. Given γ < 1, later rewards are discounted more. The sparse component of the reward—the success bonus—is significantly larger than the dense reward, but it is given to the agent at the last timestep only if the target is reached, thus the overall value of Rt highly depends on the weight before the sparse reward component. Given that the incremental reward is the increase or decrease in relative distance at each time step, and because rewards received at later time steps contribute less to Rt, the RL training implicitly converges to a time-optimal strategy, as opposed to the optimal control approach where time is explicitly minimized (6). In cases when the trained RL policy does not reach the minimal time derived from optimal control, it occurs primarily because of the limitations in available sensory information, which hinders the RL agent’s ability to make perfectly informed decisions at every step (see Supplementary Fig. 4).
At the beginning of each training episode, we chose the target location (x⋆, y⋆) randomly inside a circular area of radius 2D on one side of the wake and the swimmer’s initial position (xo, yo) randomly inside a circular area of the same size on the other side of the wake. We choose the swimmer’s initial orientation θo randomly between 0 and 2π; we set a random initial time to for the start of the training relative to the wake evolution, which we denote from hereon as the initial phase.
We used V-RACER, a model-free deep RL algorithm, implemented in Smarties117 to train the agent. The V-RACER algorithm has proven suitable for control problems in complex flow fields34,118. The policy and value function together are approximated by a 128 × 128 feedforward deep neural network with an additional residual layer that bypasses the second regular layer and additional weight as the standard deviation for action sampling. We set the decision time interval to 0.1 unit time in units of D/V, and we constrained the angular velocity to lie in the interval \(\dot{\theta }\in [-4,4]\) in units of V/D.
To consistently evaluate the performance of the RL policies obtained from distinct training and observations, we prepared 1000 test cases by randomly sampling the swimmer’s initial position (xo, yo) and orientation θo, initial phase to, and target position (x⋆, y⋆), all taken within the same ranges used during training (Supplementary Fig. 4). We tested each of the 105 policies on these 1000 cases (a total of 105,000 tests). Success rates are summarized in Supplementary Table 1.
Data availability
The data generated in this study have been deposited in the Code Ocean database under accession code https://doi.org/10.24433/CO.7749998.v1.
Code availability
Code is openly available on Code Ocean at https://doi.org/10.24433/CO.7749998.v1.
References
Loreau, M. et al. Biodiversity and ecosystem functioning: current knowledge and future challenges. Science 294, 804–808 (2001).
Tittensor, D. P. et al. Global patterns and predictors of marine biodiversity across taxa. Nature 466, 1098–1101 (2010).
Smith Jr, K. L., Ruhl, H. A., Huffard, C. L., Messié, M. & Kahru, M. Episodic organic carbon fluxes from surface ocean to abyssal depths during long-term monitoring in NE pacific. Proc. Natl Acad. Sci. 115, 12235–12240 (2018).
Smith K. Jr. et al. Abyssal benthic rover, an autonomous vehicle for long-term monitoring of deep-ocean processes. Sci. Robot. 6, eabl4925 (2021).
Worm, B. & Lotze, H. K. Marine biodiversity and climate change. In Letcher, T. M. (ed.) Climate Change, 3rd edn., 445–464 (Elsevier, 2021).
Zhang, W., Inanc, T., Ober-Blobaum, S. & Marsden, J. E. Optimal trajectory generation for a glider in time-varying 2d ocean flows b-spline model. In Proc. IEEE International Conference on Robotics and Automation, 1083–1088 (2008).
Kuhnz, L. A., Ruhl, H. A., Huffard, C. L. & Smith, K. L. Benthic megafauna assemblage change over three decades in the abyss: Variations from species to functional groups. Deep Sea Res. Part II: Top. Stud. Oceanogr. 173, 104761 (2020).
Masmitja, I. et al. Dynamic robotic tracking of underwater targets using reinforcement learning. Sci. Robot. 8, eade7811 (2023).
Dehnhardt, G., Mauck, B., Hanke, W. & Bleckmann, H. Hydrodynamic trail-following in harbor seals (Phoca vitulina). Science 293, 102–104 (2001).
Liao, J. C., Beal, D. N., Lauder, G. V. & Triantafyllou, M. S. Fish exploiting vortices decrease muscle activity. Science 302, 1566–1569 (2003).
Oteiza, P., Odstrcil, I., Lauder, G., Portugues, R. & Engert, F. A novel mechanism for mechanosensory-based rheotaxis in larval zebrafish. Nature 547, 445–448 (2017).
Zermelo, E. Über das navigationsproblem bei ruhender oder veränderlicher windverteilung. Z. Angew. Math. Mech. 11, 114–124 (1931).
Petres, C. et al. Path planning for autonomous underwater vehicles. IEEE Trans. Robot. 23, 331–341 (2007).
Bakolas, E. & Tsiotras, P. Optimal synthesis of the Zermelo–Markov–Dubins problem in a constant drift field. J. Optim. Theory Appl. 156, 469–492 (2013).
Techy, L. Optimal navigation in planar time-varying flow: Zermelo’s problem revisited. Intell. Serv. Robot. 4, 271–283 (2011).
Ross, I. M., Proulx, R. & Karpenko, M. Unscented optimal control for orbital and proximity operations in an uncertain environment: a new Zermelo problem. In Proc. AIAA/AAS Astrodynamics Specialist Conference, 4423 (2014).
Landau, I. D. et al. Adaptive Control, vol. 51 (Springer, 1998).
Hájek, P. Metamathematics of Fuzzy Logic, vol. 4 (Springer Science & Business Media, 2013).
Morari, M. & Lee, J. H. Model predictive control: past, present and future. Comput. Chem. Eng. 23, 667–682 (1999).
Krishna, K., Brunton, S. L. & Song, Z. Finite-time Lyapunov exponent analysis of model predictive control and reinforcement learning. IEEE Access (2023).
Jiao, Y. et al. Deep dive into model-free reinforcement learning for biological and robotic systems: theory and practice. 2405.11457 (2024).
Sutton, R. S. Learning to predict by the methods of temporal differences. Mach. Learn. 3, 9–44 (1988).
Ashmos, D. P., Duchon, D. & McDaniel Jr, R. R. Participation in strategic decision making: The role of organizational predisposition and issue interpretation. Decis. Sci. 29, 25–51 (1998).
Degris, T., Pilarski, P. M. & Sutton, R. S. Model-free reinforcement learning with continuous action in practice. In Proc. American Control Conference (ACC), 2177–2182 (2012).
Haith, A. M. & Krakauer, J. W. Model-based and model-free mechanisms of human motor learning. In Richardson, M. J., Riley, M. A. & Shockley, K. (eds.) Progress in Motor Control, 1–21 (Springer, 2013).
Cully, A., Clune, J., Tarapore, D. & Mouret, J.-B. Robots that can adapt like animals. Nature 521, 503–507 (2015).
Mnih, V. et al. Human-level control through deep reinforcement learning. Nature 518, 529 (2015).
Kober, J., Bagnell, J. A. & Peters, J. Reinforcement learning in robotics: a survey. Int. J. Robot. Res. 32, 1238–1274 (2013).
Heess, N. et al. Emergence of locomotion behaviours in rich environments. arXiv preprint arXiv:1707.02286 (2017).
Sutton, R. S. & Barto, A. G. Reinforcement Learning: An Introduction (MIT Press, 2018).
Murphy, K. Reinforcement learning: an overview. arXiv preprint arXiv:2412.05265 (2024).
Reddy, G., Celani, A., Sejnowski, T. J. & Vergassola, M. Learning to soar in turbulent environments. Proc. Natl. Acad. Sci. 113, E4877–E4884 (2016).
Reddy, G., Wong-Ng, J., Celani, A., Sejnowski, T. J. & Vergassola, M. Glider soaring via reinforcement learning in the field. Nature 562, 236–239 (2018).
Verma, S., Novati, G. & Koumoutsakos, P. Efficient collective swimming by harnessing vortices through deep reinforcement learning. Proc. Natl. Acad. Sci. 115, 5849–5854 (2018).
Jiao, Y. et al. Learning to swim in potential flow. Phys. Rev. Fluids 6, 050505 (2021).
Li, G., Shintake, J. & Hayashibe, M. Deep reinforcement learning framework for underwater locomotion of soft robot. In Proc. IEEE International Conference on Robotics and Automation (ICRA) 12033–12039 (2021).
Zhang, T., Wang, R., Wang, Y. & Wang, S. Locomotion control of a hybrid propulsion biomimetic underwater vehicle via deep reinforcement learning. In Proc. IEEE International Conference on Real-time Computing and Robotics (RCAR) 211–216 (2021).
Gunnarson, P., Mandralis, I., Novati, G., Koumoutsakos, P. & Dabiri, J. O. Learning efficient navigation in vortical flow fields. Nat. Commun. 12, 7143 (2021).
Singh, S. H., van Breugel, F., Rao, R. P. & Brunton, B. W. Emergent behaviour and neural dynamics in artificial agents tracking odour plumes. Nat. Mach. Intell. 5, 58–70 (2023).
Gazzola, M., Tchieu, A. A., Alexeev, D., de Brauer, A. & Koumoutsakos, P. Learning to school in the presence of hydrodynamic interactions. J. Fluid Mech. 789, 726–749 (2016).
Wang, Y. et al. Target tracking control of a biomimetic underwater vehicle through deep reinforcement learning. IEEE Trans. Neural Netw. Learn. Syst. 33, 3741–3752 (2022).
Biferale, L., Bonaccorso, F., Buzzicotti, M., Clark Di Leoni, P. & Gustavsson, K. Zermelo’s problem: optimal point-to-point navigation in 2d turbulent flows using reinforcement learning. Chaos: Interdiscip. J. Nonlinear Sci. 29, 103138 (2019).
Fang, Y., Huang, Z., Pu, J. & Zhang, J. Auv position tracking and trajectory control based on fast-deployed deep reinforcement learning method. Ocean Eng. 245, 110452 (2022).
Gunnarson, P. & Dabiri, J. O. Fish-inspired tracking of underwater turbulent plumes. Bioinspir. Biomim. 19, 056024 (IOP Publishing, 2024).
Gunnarson, P. & Dabiri, J. O. Surfing vortex rings for energy-efficient propulsion. PNAS Nexus 4, pgaf031 (2025).
Burt de Perera, T., Holbrook, R. I. & Davis, V. The representation of three-dimensional space in fish. Front. Behav. Neurosci. 10, 40 (2016).
Moser, E. I., Moser, M.-B. & McNaughton, B. L. Spatial representation in the hippocampal formation: a history. Nat. Neurosci. 20, 1448–1464 (2017).
Engelmann, J., Hanke, W., Mogdans, J. & Bleckmann, H. Hydrodynamic stimuli and the fish lateral line. Nature 408, 51–52 (2000).
Ristroph, L., Liao, J. C. & Zhang, J. Lateral line layout correlates with the differential hydrodynamic pressure on swimming fish. Phys. Rev. Lett. 114, 018102 (2015).
Stewart, W. J., Cardenas, G. S. & McHenry, M. J. Zebrafish larvae evade predators by sensing water flow. J. Exp. Biol. 216, 388–398 (2013).
Dittman, A. H. & Quinn, T. P. Homing in Pacific salmon: mechanisms and ecological basis. J. Exp. Biol. 199, 83–91 (1996).
Montgomery, J. C., Baker, C. F. & Carton, A. G. The lateral line can mediate rheotaxis in fish. Nature 389, 960–963 (1997).
Colvert, B. & Kanso, E. Fishlike rheotaxis. J. Fluid Mech. 793, 656–666 (2016).
Givon, S., Samina, M., Ben-Shahar, O. & Segev, R. From fish out of water to new insights on navigation mechanisms in animals. Behav. Brain Res. 419, 113711 (2022).
Katzschmann, R. K., DelPreto, J., MacCurdy, R. & Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 3, eaar3449 (2018).
Spedding, G. R. Wake signature detection. Annu. Rev. Fluid Mech. 46, 273–302 (2014).
Colvert, B., Alsalman, M. & Kanso, E. Classifying vortex wakes using neural networks. Bioinspir. Biomim. 13, 025003 (2018).
Colvert, B., Liu, G., Dong, H. & Kanso, E. Flowtaxis in the wakes of oscillating airfoils. Theor. Comput. Fluid Dyn. 34, 545–556 (2020).
Alageshan, J. K., Verma, A. K., Bec, J. & Pandit, R. Machine learning strategies for path-planning microswimmers in turbulent flows. Phys. Rev. E 101, 043110 (2020).
Monthiller, R., Loisy, A., Koehl, M. A., Favier, B. & Eloy, C. Surfing on turbulence: a strategy for planktonic navigation. Phys. Rev. Lett. 129, 064502 (2022).
Moe, S., Pettersen, K. Y., Fossen, T. I. & Gravdahl, J. T. Line-of-sight curved path following for underactuated USVS and AUVS in the horizontal plane under the influence of ocean currents. In Proc. 24th Mediterranean Conference on Control and Automation (MED) 38–45 (IEEE, 2016).
Du, P., Yang, W., Chen, Y. & Huang, S. Improved indirect adaptive line-of-sight guidance law for path following of under-actuated auv subject to big ocean currents. Ocean Eng. 281, 114729 (2023).
Von Uexküll, J. Umwelt und Innenwelt der Tiere (Springer, 1909).
LeCun, Y. A path towards autonomous machine intelligence version 0.9. 2, 2022-06-27. Open Rev. 62 (2022).
Kroese, A. & Schellart, N. Velocity-and acceleration-sensitive units in the trunk lateral line of the trout. J. Neurophysiol. 68, 2212–2221 (1992).
Verma, S., Papadimitriou, C., Lüthen, N., Arampatzis, G. & Koumoutsakos, P. Optimal sensor placement for artificial swimmers. J. Fluid Mech. 884 (2020).
Pan, S. J. & Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 22, 1345–1359 (2009).
Durrant-Whyte, H. & Bailey, T. Simultaneous localization and mapping: part I. IEEE Robot. Autom. Mag. 13, 99–110 (2006).
Bailey, T. & Durrant-Whyte, H. Simultaneous localization and mapping (slam): Part II. IEEE Robot. Autom. Mag. 13, 108–117 (2006).
Muhammad, N., Toming, G., Tuhtan, J. A., Musall, M. & Kruusmaa, M. Underwater map-based localization using flow features. Auton. Robots 41, 417–436 (2017).
Muhammad, N. et al. Map-based localization and loop-closure detection from a moving underwater platform using flow features. Auton. Robots 43, 1419–1434 (2019).
IBAMR. Ibamr: an adaptive and distributed-memory parallel implementation of the immersed boundary (IB) method. https://ibamr.github.io.
Bhalla, A. P. S., Bale, R., Griffith, B. E. & Patankar, N. A. A unified mathematical framework and an adaptive numerical method for fluid–structure interaction with rigid, deforming, and elastic bodies. J. Comput. Phys. 250, 446–476 (2013).
Griffith, B. E., Hornung, R. D., McQueen, D. M. & Peskin, C. S. An adaptive, formally second order accurate version of the immersed boundary method. J. Comput. Phys. 223, 10–49 (2007).
Liao, J. C., Beal, D. N., Lauder, G. V. & Triantafyllou, M. S. The Kármán gait: novel body kinematics of rainbow trout swimming in a vortex street. J. Exp. Biol. 206, 1059–1073 (2003).
Weihs, D. The mechanism of rapid starting of slender fish. Biorheology 10, 343–350 (1973).
Heydari, S., Hang, H. & Kanso, E. Mapping spatial patterns to energetic benefits in groups of flow-coupled swimmers. Elife 2024–02 (2024).
Beal, D. N., Hover, F. S., Triantafyllou, M. S., Liao, J. C. & Lauder, G. V. Passive propulsion in vortex wakes. J. Fluid Mech. 549, 385–402 (2006).
Kanso, E. & Oskouei, B. G. Stability of a coupled body–vortex system. J. Fluid Mech. 600, 77–94 (2008).
Eldredge, J. D. & Pisani, D. Passive locomotion of a simple articulated fish-like system in the wake of an obstacle. J. Fluid Mech. 607, 279–288 (2008).
Oskouei, B. G. & Kanso, E. Stability of passive locomotion in inviscid wakes. Phys. Fluids 25, 021901(2013).
Baker, K. L. et al. Algorithms for olfactory search across species. J. Neurosci. 38, 9383–9389 (2018).
Constantinidis, C., Franowicz, M. N. & Goldman-Rakic, P. S. The sensory nature of mnemonic representation in the primate prefrontal cortex. Nat. Neurosci. 4, 311–316 (2001).
Dubins, L. E. On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents. Am. J. Math. 79, 497–516 (1957).
Bechlioulis, C. P., Karras, G. C., Heshmati-Alamdari, S. & Kyriakopoulos, K. J. Trajectory tracking with prescribed performance for underactuated underwater vehicles under model uncertainties and external disturbances. IEEE Trans. Control Syst. Technol. 25, 429–440 (2017).
Saffman, P. G. Vortex Dynamics (Cambridge University Press, 1995).
Ju, H., Juan, R., Gomez, R., Nakamura, K. & Li, G. Transferring policy of deep reinforcement learning from simulation to reality for robotics. Nat. Mach. Intell. 4, 1077–1087 (2022).
Tsukamoto, H., Chung, S.-J. & Slotine, J.-J. E. Contraction theory for nonlinear stability analysis and learning-based control: a tutorial overview. Annu. Rev. Control 52, 135–169 (2021).
Taylor, M. E. & Stone, P. Transfer learning for reinforcement learning domains: a survey. J. Mach. Learn. Res. 10 (2009).
Parisi, G. I., Kemker, R., Part, J. L., Kanan, C. & Wermter, S. Continual lifelong learning with neural networks: a review. Neural Netw. 113, 54–71 (2019).
Bengio, Y., Louradour, J., Collobert, R. & Weston, J. Curriculum learning. In Proc. 26th Annual International Conference on Machine Learning, 41–48 (2009).
Uguroglu, S. & Carbonell, J. Feature selection for transfer learning. In Proc. Joint European Conference on Machine Learning and Knowledge Discovery in Databases, 430–442 (Springer, 2011).
Ghosh, D., Singh, A., Rajeswaran, A., Kumar, V. & Levine, S. Divide-and-conquer reinforcement learning. arXiv preprint arXiv:1711.09874 (2017).
Jimenez, J. On the linear stability of the inviscid kármán vortex street. J. Fluid Mech. 178, 177–194 (1987).
Kolmogoroff, A. Interpolation und extrapolation von stationaren zufalligen folgen. Izvestiya Rossiiskoi Akademii Nauk. Seriya Matematicheskaya 5, 3–14 (1941).
Arnold, V. I. Ordinary Differential Equations (Springer Science & Business Media, 1992).
Strogatz, S. Nonlinear Dynamics and Chaos with Student Solutions Manual: With Applications to Physics, Biology, Chemistry, and Engineering, Second Edition (CRC Press, 2018).
Hang, H. et al. Interpretable and generalizable strategies for stably following hydrodynamic trails. bioRxiv 2023–12 (2023).
Temizer, I., Donovan, J. C., Baier, H. & Semmelhack, J. L. A visual pathway for looming-evoked escape in larval zebrafish. Curr. Biol. 25, 1823–1834 (2015).
Cade, D. E., Carey, N., Domenici, P., Potvin, J. & Goldbogen, J. A. Predator-informed looming stimulus experiments reveal how large filter-feeding whales capture highly maneuverable forage fish. Proc. Natl. Acad. Sci. 117, 472–478 (2020).
McKee, A. & McHenry, M. J. The strategy of predator evasion in response to a visual looming stimulus in zebrafish (Danio rerio). Integr. Organ. Biol. 2, obaa023 (2020).
Vergassola, M., Villermaux, E. & Shraiman, B. I. ‘infotaxis’ as a strategy for searching without gradients. Nature 445, 406–409 (2007).
Leonard, N. E. et al. Collective motion, sensor networks, and ocean sampling. Proc. IEEE 95, 48–74 (2007).
Bellemare, M. G. et al. Autonomous navigation of stratospheric balloons using reinforcement learning. Nature 588, 77–82 (2020).
Colvert, B., Chen, K. & Kanso, E. Local flow characterization using bioinspired sensory information. J. Fluid Mech. 818, 366–381 (2017).
Merel, J. et al. Deep neuroethology of a virtual rodent. arXiv preprint arXiv:1911.09451 (2019).
Pfeifer, R. & Gómez, G. Morphological computation–connecting brain, body, and environment. Creating brain-like intelligence: from basic principles to complex intelligent systems 66–83 (2009).
Yen, J., Lenz, P. H., Gassie, D. V. & Hartline, D. K. Mechanoreception in marine copepods: electrophysiological studies on the first antennae. J. Plankton Res. 14, 495–512 (1992).
Kiørboe, T., Saiz, E. & Visser, A. Hydrodynamic signal perception in the copepod acartia tonsa. Mar. Ecol. Prog. Ser. 179, 97–111 (1999).
Wheeler, J. D., Secchi, E., Rusconi, R. & Stocker, R. Not just going with the flow: the effects of fluid flow on bacteria and plankton. Annu. Rev. Cell Dev. Biol. 35, 213–237 (2019).
Li, L. et al. Vortex phase matching as a strategy for schooling in robots and in fish. Nat. Commun. 11, 1–9 (2020).
McKee, A., Soto, A. P., Chen, P. & McHenry, M. J. The sensory basis of schooling by intermittent swimming in the rummy-nose tetra (hemigrammus rhodostomus). Proc. R. Soc. B 287, 20200568 (2020).
Peterson, A. N., Soto, A. P. & McHenry, M. J. Pursuit and evasion strategies in the predator–prey interactions of fishes. Integr. Comp. Biol. 61, 668–680 (2021).
Peskin, C. S. Numerical analysis of blood flow in the heart. J. Comput. Phys. 25, 220–252 (1977).
Mittal, R. & Iaccarino, G. Immersed boundary methods. Annu. Rev. Fluid Mech. 37, 239–261 (2005).
Lienhard, J. H. et al. Synopsis of Lift, Drag, and Vortex Frequency Data for Rigid Circular Cylinders, vol. 300 (Technical Extension Service, Washington State University, 1966).
Novati, G. & Koumoutsakos, P. Remember and forget for experience replay. In Proc. International Conference on Machine Learning, 4851–4860 (PMLR, 2019).
Novati, G. et al. Synchronisation through learning for two self-propelled swimmers. Bioinspir. Biomim. 12, 036001 (2017).
Student. The probable error of a mean. Biometrika 1–25 (1908).
Fisher, R. A. On the interpretation of χ2 from contingency tables, and the calculation of p. J. R. Stat. Soc. 85, 87–94 (1922).
Acknowledgements
Funding support provided by the National Science Foundation (NSF) grants RAISE IOS-2034043 and CBET-210020 and the Office of Naval Research (ONR) grants N00014-22-1-2655 and N00014-19-1-2035 (all to E.K.).
Author information
Authors and Affiliations
Contributions
E.K. designed the research and secured funding for this study. E.K. and J.M. supervised the research, Y.J. and H.H. developed code, run simulations, and collected data. Y.J., H.H., and E.K. analyzed data and wrote the manuscript. All authors reviewed and edited the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks the anonymous reviewers for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Jiao, Y., Hang, H., Merel, J. et al. Sensing flow gradients is necessary for learning autonomous underwater navigation. Nat Commun 16, 3044 (2025). https://doi.org/10.1038/s41467-025-58125-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41467-025-58125-6
