
Abstract
Upper-plate aftershocks following megathrust earthquakes are particularly dangerous as they may occur close to densely populated regions. Aftershock numbers decay with time, imposing a time-dependent seismic hazard that is assessed with statistical forecast models. While coseismic static stress transfer cannot explain this time-dependency, transient postseismic deformation due to afterslip, viscoelastic relaxation, and pore-pressure diffusion are potential candidates. Here we demonstrate which postseismic process is the key driver of the upper-plate aftershocks pattern following the 2014 Mw = 8.2 Iquique earthquake in northern Chile. We first use a 4D (space and time) model approach to reproduce the postseismic deformation observed in geodetic data. We then analyze the spatiotemporal stress changes produced by individual postseismic processes and compare them to the upper-plate aftershocks distribution. Our results reveal that stress changes produced by coseismically-induced pore-pressure diffusion best correlate in space and time with increased upper-plate aftershock activity. Moreover, an increase in pore-pressure reduces the three effective principal stress magnitudes likewise. Hence, all faults, regardless of their orientations, are brought closer to failure. This explains the higher diversity of the aftershocks faulting styles. Our findings provide further insights into the link between pore-pressure diffusion and upper-plate deformation in subduction zones and provide grounds for a physics-based aftershock forecast.
Similar content being viewed by others
Introduction
Aftershocks are a global time-dependent process in the aftermath of earthquakes, as first observed by Omori1 in 1894. At subduction zones, upper-plate aftershocks are particularly important due to their relatively shallow depth and their potential occurrence near populated regions. As aftershock numbers exhibit an exponential decay over time2,3, the increase of seismic hazard is time-dependent. Most forecasts of aftershocks are based on statistical models since physics-based ones are often not capable of explaining their occurrence in time and space4. Aftershocks occur delayed from the main shock by days to weeks, such as the Pichilemu (Mw = 7.0 and Mw = 6.9) events 12 days after the 2010 Mw 8.8 Maule (Chile) earthquake, or even later, after several months or years2,5,6,7. Unlike the aftershocks along the megathrust itself, the events in the upper plate can show variable faulting styles (thrust, normal, or strike-slip) as observed following the 2011 Tohoku-Oki (Japan), 2010 Maule and 2014 Iquique (Chile), 2004 Sumatra-Andaman (Indonesia), and 2015 Gorkha (Nepal) megathrust events5,6,8,9. Upper-plate aftershocks have been widely investigated by static or dynamic coseismic stress changes2,4,5,10,11,12,13,14 mainly using the parameter of Coulomb Failure Stress change (ΔCFS, see Methods) to provide a scalar value that visualizes the modeled changes of the stress field. Here, the ΔCFS parameter is governed by the shear and effective normal stress of a given fault orientation, along with the assumed coefficient of friction10. Positive ΔCFS values indicate that the stress state resolved on a given fault has been brought closer to failure, while negative ΔCFS values indicate that the fault failure has been reduced10. However, even when coseismic ΔCFS values may explain the spatial distribution of the aftershocks of some mainshocks2,5,12, they fail to explain the time dependency. A plausible candidate to explain the time dependency may be postseismic crustal deformation exhibiting a similar exponential time decay. Despite significant scientific efforts15,16,17,18, it remains unclear which postseismic deformation process drives the stress changes that trigger the aftershock sequence in the upper plate.
Postseismic deformation can be decomposed into three main processes: aseismic slip (afterslip) along the megathrust interface, viscoelastic relaxation in the continental lower crust and upper mantle, and pore-pressure diffusion in the upper plate15,19,20,21,22,23,24,25. These deformation processes act at different spatiotemporal scales, resulting in complex and sometimes opposite surface deformation patterns20,21,26. In the near field, afterslip generally dominates the 3D geodetic displacement field from months to years19,27. Poroelastic deformation can also contribute locally to the 3D near-field deformation, especially to the vertical surface deformation, comparable in magnitude to the one produced by afterslip15,26,28. Viscoelastic relaxation controls the far-field displacement at decade scales21, while depending on the assumed rheology it may also contribute to the near-field from weeks to years15,27,29,30,31. Indeed, pore-pressure changes and their impact on the effective normal stress have been proposed to control the occurrence of aftershocks already by Nur and Booker32 in 1972. This hydraulic process has also been extensively studied during injection experiments in geothermal systems or wastewater disposal at depth33,34,35,36, as well as in natural hydrothermal or over-pressured fluid systems in normal faulting and strike-slip regimes37,38,39,40,41,42. Although still debated at subduction zones, the presence of higher pore-fluid pressure in the fault zone and upper plate due to metamorphic dehydration reactions from the oceanic plate43,44 suggests that pore-pressure diffusion may play a role in the generation of upper-plate aftershock activity and/or other seismological processes. For instance, transient changes in seismic velocity (vp/vs ratio) in the upper plate45,46, the spatiotemporal migration front imaged by aftershocks47,48,49, and some shallow crustal aftershocks15 have been associated with pore-pressure diffusion induced by the main shock in the Chilean, Northern Japan, and Indonesian subduction zones. Nevertheless, a direct link between the occurrence of upper-plate aftershocks in space and time with pore-pressure diffusion from a physics-based forward model remains to be demonstrated in subduction zones. Here, we use comprehensive seismological and geodetic datasets to investigate with a 4D hydro-mechanical-numerical model which stress-changing process is the key driver of the upper-plate aftershocks following the Mw = 8.2 Iquique megathrust earthquake in northern Chile.
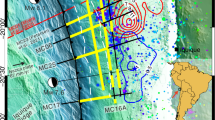
The Mw 8.2 Iquique earthquake occurred on April 1st, 2014, in northern Chile50 (Fig. 1 and Supplementary Fig. 1). The deformation before, during, and after the Iquique earthquake has been continuously monitored for more than 15 years with a high spatial and temporal resolution by state-of-the-art geodetic and geophysical instrumentation within the Integrated Plate Boundary Observatory Chile (IPOC) network50,51,52,53. In particular, the geodetic Global Navigation Satellite System (GNSS) and seismic networks detected significant non-linear, transient surface deformation and numerous upper-plate aftershocks showing a diversity of faulting styles following the main shock3,8,51 (Figs. 1, 2). From these observations we hypothesize that the increase in upper-plate seismicity in space and time following the main shock is controlled by pore-pressure diffusion.

Upper-plate seismicity3 and focal mechanisms8 for the period nine months before (a) and nine months after (b) the mainshock. The plate interface is presented in green-dashed 20 km contour lines. b red and grey lines represent the 1.0 m and 0.5 m contours of coseismic slip produced from the main shock and largest aftershock50, respectively. Upper-plate aftershocks within the cross-section P—P' shown in a and b are exhibited in c. The black-dashed line in c represents the depth (12.5 km) of the cross-sections in Fig. 3. d Cumulative number of events over time in the whole study region. e Cumulative number of events over time for the two sub-volumes R1 and R2 displayed in c). The width of the sub volume is indicated with the transparent green corridor in a) and b).

Comparison between the observed and predicted postseismic surface displacement during the first 270 days after the mainshock. a Cumulative displacements from the modeled afterslip, poroelastic, and non-linear viscoelastic relaxation compared to Global Navigation Satellite System (GNSS) observations. Color-coded inverted afterslip on the plate interface is exhibited in the background. b–g Comparison of the horizontal and vertical postseismic displacement time-series between modeled (black lines) and GNSS daily solutions (olive dots) from the three GNSS stations PSGA, IQQE, and COLC. The total modeled deformation (black) is also decomposed into the relative contribution of afterslip (red dashed lines), poroelasticity (blue lines), and non-linear viscoelastic relaxation (grey dashed lines).
In this work, we employ a 4D forward model to first quantify the cumulative surface displacements that are due to viscoelastic relaxation and poroelasticity. These modeled surface displacements are subtracted from the observed GNSS surface displacements. In a second step we invert the residual deformation signal for the afterslip distribution15. Our workflow, which combines forward and inversion modeling, accurately explains the observed geodetic surface displacement in both space and time for the horizontal and vertical time series (Fig. 2). Our study contrasts with most studies investigating aftershock patterns globally, as they often disregard the information provided by horizontal and vertical geodetic observations when constraining the location and magnitude of deformation produced by postseismic processes13,14,39,40,45,47,48. We then analyze the modeled spatio-temporal stress changes that result from our approach (Figs. 3, 4). To visualize the modeled 3D stress tensor, we use the parameter ΔCFS (see Methods). We calculate and compare the individual contributions from postseismic processes mentioned above with upper-plate aftershock patterns. The comparison of our results with seismicity3 and the prevailing focal mechanisms8 indicates that the aftershock sequence patterns in the upper plate are unambiguously better explained by pore-pressure diffusion than by afterslip or non-linear viscous stress relaxation processes.

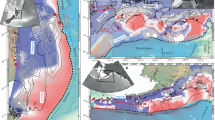
Cumulative Coulomb Failure Stress changes (ΔCFS) after 270 days at 12.5 km depth from poroelasticity (upper row, a–c), afterslip (middle row, d–f), and non-linear viscoelastic relaxation (lower row, g–i) in comparison to upper-plate aftershocks above 25 km depth. The ΔCFS is computed for the mean fault orientation of two subsets where we grouped the normal and thrust faulting focal mechanisms of the aftershock sequence8. For thrust faulting (left column), we obtain mean values of 137° (strike), 54° (dip), and 80° (rake), respectively, for normal faulting (middle column) 140° (strike), 57° (dip), and 104° (rake), respectively. For comparison, we also compute the ΔCFS for strike-slip faulting (right column) with 0° (strike), 90° (dip), and 0° (rake), respectively.

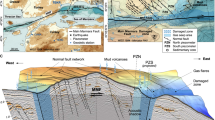
Same as Fig. 3 but along the W-E cross section P–P' at 19.75°S shown in Fig. 1 and for poroelasticity (a–c) and afterslip (d–f) processes only. The black rectangles on the surface of the model (solid blue line) indicate the locations of the two Global Navigation Satellite System (GNSS) stations, PSGA (closest to the trench) and PB11, along cross section P–P'.
Results
Surface deformation patterns
Our postseismic deformation model fits the observed GNSS displacement very well (Fig. 2 and Supplementary Fig. 2). The estimated afterslip distribution localizes in the region of moderate coseismic slip, which agrees with those predicted by stress-driven afterslip distributions27,54. Furthermore, the afterslip magnitude and location are similar to previous geodetic studies of the Iquique earthquake51,55. Still, clear differences are found near the regions of maximum afterslip, primarily because previous studies51,55 did not consider poroelasticity and non-linear viscoelasticity. Afterslip dominates the trenchward motion observed in the horizontal component of the GNSS time series in the near field, compared to the approximately 2 cm of landward motion attributed to poroelastic deformation (Fig. 2b, d, f). This modeled postseismic landward motion is consistent with surface displacements due to crustal poroelastic deformation inferred in other subduction regions19,20,26,28. Nevertheless, poroelastic deformation significantly contributes to vertical surface displacements (Fig. 2 and Supplementary Fig. 3b). The largest poroelastic vertical surface displacements are found near the coastline, in front of the region of the largest coseismic slip release at station PSGA with an uplift of ~ 5 cm (Fig. 2 and Supplementary Fig. 3b). This represents about 60% of the subsidence resulting from afterslip in the near field at the stations PSGA (Fig. 2c) and IQQE (Fig. 2e). At greater distances from the trench, non-linear viscoelastic relaxation is the key driver of a larger fraction of the observed horizontal and most of the vertical displacements (see, e.g., station COLC location in Fig. 2f, g and Supplementary Fig. 3c). Moreover, poroelastic processes decay faster than afterslip and non-linear viscoelastic relaxation (e.g., Fig. 2c, g). Finally, although the improvement in geodetic data fit is small, our F-test results demonstrate that, at a 0.05 significance level, incorporating poroelasticity to a model that includes afterslip and viscoelasticity is statistically preferable (Supplementary Fig. 4 and Supplementary Table 1).
Stress changes due to individual postseismic processes
We visualize the stress changes accumulated after 270 days from the individual postseismic process on a horizontal plane at 12.5 km depth (Fig. 3) and along the cross-section P–P’ (Fig. 4; light-green corridor in Fig. 1a–b). For the ΔCFS estimation the changes in normal and shear stress of a given fault orientation are used (see Methods) (Supplementary Figs. 5 and 6). Here we use the mean fault orientation of two subsets where we grouped the thrust and normal faulting focal mechanisms of the aftershock sequence8 (first and second columns, respectively, in Figs. 3, 4). For comparison, we also estimate the ΔCFS for strike-slip faulting (third column in Figs. 3, 4). The highest ΔCFS at 12.5 km depth results from poroelasticity in the forearc close to the coastline, with ΔCFS values of around +2.5 bar (Fig. 3a–c) and around +13 bar at 30 km depth (Fig. 4a–c). The minimum ΔCFS from poroelasticity is found closer to the trench, with values of about -5 bar at 12.5 km depth and -14 bar along the cross-section profile P–P’. These ΔCFS values are comparable in magnitude to those resulting from afterslip, but clear differences are found both in the location of maximum and minimum values, as well as in the wavelength of the patterns. In contrast to ΔCFS values caused by afterslip, poroelastic ΔCFS patterns result in larger spatial wavelengths, with mostly one lobe of increased and another of decreased ΔCFS values (e.g., Fig. 3a). On the other hand, the ΔCFS values from non-linear viscoelastic relaxation are more than one order of magnitude lower (Fig. 3g–i).
Furthermore, we find that the positive poroelastic ΔCFS values correlate better in space with upper-plate aftershocks than those from afterslip and viscoelastic relaxation, while the resulting poroelastic ΔCFS patterns are insensitive to the employed fault orientation (Fig. 3a–c and Fig. 4a–c). Pore-pressure changes, which constitute the major contribution to poroelastic stress changes (Supplementary Fig. 7) and primarily affect the normal stresses (Supplementary Figs. 5g–i and 6g–i), have an equal impact on all three normal stress components of the stress tensor56. Therefore, the effective normal stresses resolved on any fault orientation are reduced equally when pore-pressure changes increase (see Methods).
Pore-pressure changes and upper-plate aftershocks occurrence in space and time
After demonstrating that ΔCFS due to pore-pressure changes can explain the upper-plate aftershocks distribution in space much better than those from afterslip or viscoelastic relaxation, we examine whether pore-pressure, as the major component of the poroelastic stress changes, can also explain the temporal evolution of the upper-plate aftershocks. Figure 5 displays the spatiotemporal evolution of pore-pressure and upper-plate aftershocks along the cross-section profile P–P’ over 270 days divided into four time windows of around 67 days. Similarly, Fig. 6a–c compare the temporal evolution of the pore-pressure and the normalized cumulative number of aftershocks from the two subvolumes R1 and R2 (Fig. 1c). We used the cumulative number of aftershocks to be directly compared with the best-fitting curve using the empirical Omori-Utsu law57 (see Methods).

Spatial and temporal pore-pressure changes and upper-plate aftershocks across profile P–P’. Time windows 0-270 days (total accumulated) (a), 0–67 days (b), 68–135 (c), 136–203 (d), and 204–270 (e) for pore-pressure changes and upper-plate aftershocks. The black rectangles are as shown in Fig. 4.

Spatial and temporal pore-pressure changes and upper-plate aftershocks across profile P–P' (a) and two subvolumes R1 (b) and R2 (c) after 270 days. See in a location of the subvolumes R1 and R2. Pore-pressure time series are computed as a mean of 25 points within each of the subvolumes R1 and R2. The black rectangles are as shown in Fig. 4.
Our results reveal that most upper-plate events are located in regions of increased pore-pressure (Figs. 5, 6a, and Supplementary Fig. 8). Here, the exponential time decay of the upper-plate aftershocks is also captured by the time-dependency of pore-pressure changes (Figs. 5b–e and 6b–c). In particular, we find a strong temporal correlation (>0.98) between the pore-pressure increase and the cumulative number of upper-plate aftershocks (Fig. 6b, c). The temporal decay of upper-plate aftershocks is a function of distance from the region of the highest coseismic slip; the aftershock region closer to the plate interface (R1 in Fig. 5b) depicts a faster increase in aftershock activity than the region further away (R2 in Fig. 6c). This agrees with the spatiotemporal diffusion of pore pressure. It expands from the source of initial deformation, i.e., the coseismic rupture area, to larger distances56. However, we do not observe a distinct spatiotemporal migration of all upper-plate aftershocks relative to the main shock hypocenter when considering a discrete point-source linear fluid diffusion model47 (Supplementary Fig. 9). This result aligns with observations from other aftershock sequences in other subduction zones17. This discrepancy may arise from the assumption that initial fluid release in subduction zones influences a more extensive area (>1000 km2) rather than originating from discrete source points58.
Discussion
Pore-pressure diffusion in the upper plate
We propose that pore-pressure diffusion is the main trigger mechanism of upper-plate aftershocks given its superior correlation with spatial (Figs. 3, 4) and especially temporal occurrence (Figs. 5, 6b–c). This is also supported by poroelastic ΔCFS values much larger than a critical triggering value of +0.1 bar2,10 in the region where most of the upper-plate aftershocks occur. It contrasts with the widely used ΔCFS values that result from time-independent coseismic stress changes using purely elastic models in all tectonic settings2,8,10,12,59. These conventional static stress changes can explain the spatial distribution in some cases2, but they fail to particularly explain the exponential time-dependency of aftershocks. This time dependency could be explained by the exponential decay of afterslip16,18 or non-linear viscoelastic relaxation60, but the estimates of ΔCFS resulting from these postseismic processes are heterogeneous and highly sensitive to the receiver fault orientation and the assumed style of faulting, respectively (e.g., Fig. 3d–f). However, in the aftershock sequence, we observe diverse faulting styles that take place on closely spaced faults (Fig. 1). This pattern of different faulting styles occurring next to each other is often observed, with examples including megathrust events in central–south Chile5,6, northern Japan9, and the Greek Hellenic arc61.
Upper-plate aftershocks generally occur in the region of coseismic dilation (where postseismic pore-pressure increases transiently15,32,45, Fig. 5) and depict a change from thrust faulting to prevailing normal and strike-slip faulting in the fore- and volcanic-arc regions, respectively5,9,62. Unlike fault-slip processes (e.g., afterslip, slow slip), pore-pressure diffusion fits quite well since it acts equally in all directions of the rock pore void56. Therefore, increased pore pressure reduces the effective fault normal stresses independently of the fault orientation and consequently triggers all faulting styles (Figs. 3a–c and 4a–c). Our results are also supported by other studies that propose that pore-pressure changes best explain the changes in the stress field and the presence of different focal mechanisms within the subducting plate in northern Hikurangi, New Zealand43, and in the shallow crust in the transform fault zone in South Iceland37.
Furthermore, pore-pressure diffusion may be the physical interpretation for the observations laid down in the widely used empirical Omori-Utsu law describing temporal patterns of upper-plate aftershocks (Fig. 6b, c). Here, the p-values (1.41 and 1.21 calculated from the aftershock temporal decay in the R1 and R2 boxes, respectively) agree with the expected range and findings from other studies39,57,63. Therefore, and as an alternative to rate-and-state18,64 or damage65,66 models predicting Omori-type temporal behavior, our discovery in the northern Chile subduction zone suggests that the physical meaning of the Omori-type formulation may be related to the hydraulic properties (e.g., rock permeability and/or porosity) of the upper plate, similarly to Miller’s39 findings in Southern California.
Crustal rock permeability in subduction zones
The key parameter controlling the temporal evolution of pore-pressure diffusion is rock permeability67. In our model, we used a continental crust permeability value of ~ 1014 m2 as found by previous studies in northern Chile45,47, which is a relatively high permeability compared to other tectonic settings68. Nevertheless, it is about three orders of magnitude lower than values for typical crustal-scale rocks found by geological field measurements in northern Chile69. Moreover, our values are similar to those obtained in other subduction zones, e.g., from the aftershock migration front following the 2004 Sumatra-Andaman, Indonesia, earthquake49 and hydro-mechanical-numerical modeling to explain the short-term postseismic geodetic signal in southern Chile15. Although we cannot neglect a transient increase in permeability due to the main shock39,68,70, it would increase by about one order of magnitude39,68, which is much smaller compared to the uncertainty of permeability68 and will primarily affect the amplitude but not the general pattern of the resulting spatial pore-pressure changes.
Implications for aftershock forecasting
We demonstrated that pore-pressure diffusion is most likely the key driver of aftershocks in the upper plate after the 2014 Iquique earthquake in northern Chile. The similarity of the deformation pattern imprinted in upper-plate aftershocks in other subduction zones, such as the non-linear decay over time and triggering of variable faulting styles, suggests that pore-pressure diffusion may govern the postseismic reactivation of upper-plate faults after megathrust earthquakes worldwide. This suggests that computations of time-independent ΔCFS on optimally oriented faults using elastic models to infer the potential response of upper-plate faults to megathrust earthquakes2,12,71 must be revised. In particular, faults that are not favorably oriented during the interseismic stress accumulation phase may also be brought closer to failure, especially those onshore in the region of coseismic extension (Figs. 3a–c and 4a–c) where pore-pressure increases over time (Fig. 5). Indeed, the possibility of large magnitude upper-plate aftershocks occurring close to highly-populated forearc regions2,11 poses an elevated seismic risk, for instance, in cities along the subduction margins in South America, Japan, Indonesia, and Western US and Canada. Finally, our modeling workflow of postseismic deformation and stress changing processes provides promising results for a physics-based aftershock forecast4.
Methods
Seismicity and earthquake focal mechanisms
We used published catalogs of high-resolution seismicity and earthquake focal mechanisms8. Sippl et al.3 classified the upper-plate events ≤ 70.8°W only due to the deterioration of the depth accuracy further offshore. We extend this compilation by including events from locations >70.8°W that have a distance > 10 km from above the plate interface72. This conservative threshold of 10 km results from the large depth uncertainty of offshore events for regions west of 70.8°W in northern Chile3,8. We select focal mechanisms in the upper plate with rake, dip, and strike angles that fall outside a ± 30° range from the fault geometry of the main shock. In addition to this constraint, we also select those events whose perpendicular distance to the plate interface is larger than 10 km for >70.8°W and 4 km for ≤ 70.8°W based on the event location uncertainty8. The resulting data are shown in Fig. 1 and Supplementary Fig. 1.
Continuous GNSS surface displacements
We use published daily continuous GNSS positioning time-series from Hoffmann et al.51 obtained from the IPOC network (Fig. 2 and Supplementary Fig. 2). The daily positions are transformed from the International Terrestrial Reference Frame into a regional South American Frame51. To investigate the processes that control transient postseismic deformation15,27 (afterslip, poroelastic, viscoelastic relaxation), we use the trajectory model of Bevis and Brown73 to remove seasonal signals, jumps due to large aftershocks and/or antenna changes, and the interseismic linear component calculated before the 2014 main shock from the positioning time-series.
Forward model of hydro-mechanical processes
We construct a 4D hydro-geomechanical-numerical model for the study region, northern Chile, following the strategy of Peña et al.15. The geometry of the model uses the plate interface from the Slab1.0 model72 and we set a Moho discontinuity at 50 km depth, as observed by seismological studies and predicted by density models74. The model extends 4000 km in the north-south direction, 2000 km in the east-west direction, and 400 km in the vertical direction (Supplementary Fig. 10), large enough to avoid boundary effects as shown in previous studies modeling postseismic deformation in subduction zones19,27,75. The model is discretized into ~ 6 × 106 tetrahedral-finite elements ( ~ 106 nodes) of minimum ~ 2 km in the region of key postseismic deformation and increases up to ~ 50 km at the model boundaries (Supplementary Fig. 10). We perform a second-order element test to evaluate the impact of the number and size of elements, particularly on the resulting pore-pressure changes and the subsequent ΔCFS estimates. We find, however, a negligible impact of a higher-element resolution, thus indicating that our element size selection is adequate to model large-scale poroelastic deformation (Supplementary Fig. 11).
The resulting coupled partial differential equations of linear poro-elasticity and temperature-controlled power-law rheology (non-linear viscosity) are numerically solved using the commercial finite element software ABAQUSTM version 6.14. We implement power-law rheology with dislocation creep processes in the crust, slab, and upper mantle as:
where \(\dot{\epsilon }\) is the creep strain rate, A is a pre-exponent parameter, σ the differential stress, n the stress exponent, Q the activation enthalpy for creep, R the gas constant, and T the absolute temperature76. We adopt the 2D temperature field of Springer77 for northern Chile and extend it into our 3D model domain following Peña et al.19. We neglect linear diffusion and transient creep processes due to the dominant role of dislocation creep processes in the lower crust and upper mantle78 and the high uncertainty of the temperature field at higher depths77, respectively. We use elastic and creep rock material parameters obtained from seismological studies and laboratory experiments76, respectively, while the spatial distribution of effective non-linear viscosity is driven by the temperature field in the whole model. We consider for the continental crust quartzite (n = 2.3, A = 3.2 × 10−4 MPan s−1, Q = 154 kJ/mol)76 with a Young’s modulus of E = 100 GPa and Poisson’s ratio of ν = 0.265, for the continental and oceanic upper mantle wet olivine with 0.1% (A = 5.6 × 10−6 MPan s−1) and 0.01% (A = 1.6 × 10−5 MPan s−1) of water content, respectively (n = 3.5, Q = 480 kJ/mol)76 and E = 160 GPa and ν = 0.25; and for the slab diabase (n = 3.4, A=2.0 × 10−4 MPan s−1, Q = 260 kJ/mol) and E = 120 GPa and ν = 0.3.
Poroelasticity is implemented in the whole model domain following the approach of Wang56 that has been successfully applied in many studies15,20,67,79,80. Here, the equations of mass conservation and Darcy’s Law describe the fully-coupled displacement field (u) and pore-fluid pressure (p) in Cartesian coordinates (x) expressed in index notation as follows:
where v and G correspond to the drained Poisson’s ratio and shear modulus, respectively, and α the Biot-Willis coefficient in equation (2). In equation (3), t is the elapsed time since the main shock, \({\varepsilon }_{kk}=\frac{\partial {u}_{k}}{\partial {x}_{k}}\) the volumetric strain, κ the intrinsic rock permeability, uf the pore-fluid viscosity, and Sϵ the constrained storage coefficient. The latter, Sϵ, is described as a function of α, rock bulk modulus K, porosity ϕ, pore-fluid (water) bulk Kf, solid-grain modulus Ks, Skempton’s coefficient B, and undrained Poisson’s ratio νu as described in equations (4), (5), and (6). We use poroelastic parameters for the upper plate in subduction zones20,26,28,45,47,81 of uf = 1 × 10−4 Pa s15,45,47,81, α = 0.515,28, ϕ = 0.00547,82, Kf= 2.8 GPa45,81, B = 0.828,83 and νu = 0.3495 (obtained directly from Equation (6)), while other elastic rock material properties are the same as described above. Furthermore, we show that the resulting pore-pressure changes are not significantly affected, even in extreme cases, when considering Kf = 4 GPa and νu = 0.4 (Supplementary Figs. 12 and 13). We use the same parameters for the slab and upper mantle, but with a permeability of 1 × 10−17 m268,80 due to the lack of poroelastic data parameters in these model domains.
The resulting model fit to the geodetic data is found in Fig. 2 and Supplementary Fig. 2. For comparison, the individual contribution to the surface deformation field is also presented in Supplementary Fig. 3. The onset of the poro- and viscoelastic relaxation is driven by the coseismic deformation produced by the 2014 Iquique earthquake. We use the slip distribution from Schurr et al.50 and implement it as a boundary condition on the nodes representing the fault interface. We show that our model can fit the coseismic GNSS observations (Supplementary Fig. 14a), which is in good agreement with the predictions from using the analytical elastic half-space Okada’s model84 (Supplementary Fig. 14b), similar to other studies worldwide67,85. Finally, we find no significant differences in the resulting coseismic surface deformation at the GNSS sites when using our 4D forward model with homogeneous or undrained elastic rock material conditions when modelling coseismic deformation in our case (Supplementary Figs. 14 and 15).
Inversion approach and stress and pore-pressure changes
After the quantification of the deformation due to non-linear viscoelastic relaxation and poroelasticity with the 4D forward model, we subtract the results from the cumulative GNSS time-series. We then use the residual cumulative deformation signal and invert it for the afterslip distribution to obtain the cumulative afterslip distribution up to the end of 2014, i.e., over approximately nine months. Here, we use the same 3D model (geometry, element type) and elastic rock material properties as described above to compute the Green’s functions at the GNSS sites. We then use a linear, static inversion approach with Laplacian constraints that minimizes the residual GNSS geodetic signal15,19,80. Once we have the cumulative afterslip distribution, we model its temporal decay using a well-established time-dependent function from stress-driven afterslip studies as A(t) = A0log\(\frac{{t}_{a}+{t}_{c}}{{t}_{r}}\) with A0 as the amplitude obtained from the inversion, ta is the elapsed time after the main shock, tr is the characteristic relaxation time, and tc the critical time, which is introduced to avoid the singularity at t = 022. The value of tr was manually adjusted to match the observed time series.
We evaluate the impact of poroelasticity and non-linear viscoelasticity on afterslip inversion, exhibited in the Supplementary Fig. 16. Our afterslip resolution on the megathrust is also found in the Supplementary Fig. 17. The inclusion of poro-viscoelastic effects changes the distribution of afterslip mostly locally, similar to our previous study in central Chile19 and those in Costa Rica as shown by McCormack et al.28. Furthermore, we test the effect of simulating the postseismic processes separately or jointly in our model. We find that the interaction between processes does not play a major role as exhibited in Supplementary Fig. 18.
The parameter Coulomb Failure Stress Change
Any model that simulates deformation processes also provides stress changes that are described with the 2nd rank Cauchy stress tensor σij. To analyze and visualize the modeled stress changes, scalar values are derived from the stress tensor86,87. A common practice in the research field that investigates the earthquake cycle is to resolve the stress changes on a given plane fault by multiplying the stress tensor σij with the fault normal vector ni. The resulting traction vector can be decomposed into a component that is perpendicular to the fault (σn, the fault normal stress), and one that is parallel to the fault (τ, the shear stress). Using these two values, the Coulomb Failure Stress changes ΔCFS provides a scalar value that is calculated as:
where, μfr is the coefficient of friction and P is the pore pressure. Positive stress changes are interpreted that the modeled stress change has brought the fault closer to failure, and negative values denote that the fault has departed from failure. Here, ΔCFS values are not a direct measure of displacement. Indeed, our results show that, although afterslip and poroelasticity show similar ΔCFS values in maximum and minimum magnitudes, afterslip generally contributes more to the 3D postseismic surface displacement field (Fig. 2). Here, afterslip produces most of the equivalent strain (Supplementary Fig. 19) and deviatoric stresses (Supplementary Fig. 20) in the upper plate. The latter is the key control of postseismic deformation in the near field and agrees with the relative contribution of postseismic deformation processes to the surface deformation field (Fig. 2).
In our study we use for μfr = 0.62,10,12, while the other values for τ, σn, and P are directly obtained from the 4D model outputs that simulate the individual postseismic processes that change the stress state. We test a smaller and higher value of μfr = 0.4 and μfr = 0.8583, but the resulting ΔCFS values are not greatly affected (Supplementary Figs. 21–24). The ΔCFS are computed using the add-on GeoStress for Tecplot 360 EX86,87. For the afterslip and non-linear viscoelastic calculations of ΔCFS, we consider P = 0 MPa since it is then calculated separately as the poroelastic contribution. For the ΔCFS due to poroelasticity we separate the contributions from elastic and pore-pressure changes to show that the major component is the pore pressure (Supplementary Fig. 7). For comparison, we present the individual components of the ΔCFS, i.e., shear and normal stress components, from afterslip and poroelastic deformation (Supplementary Figs. 5 and 6). In addition, we show the ΔCFS values resulting from an afterslip inversion considering an elastic-only model. We find that the afterslip distribution from an elastic-only model cannot explain the spatial distribution of upper-plate aftershocks (Supplementary Figs. 25 and 26). Furthermore, we show that the overall poroelastic surface deformation produced by the largest aftershocks (Mw=7.6) is negligible compared to the one produced by the 2014 mainshock (Supplementary Fig. 27). Additional cross-sections showing the spatial distribution of upper-plate aftershocks and pore-pressure diffusion are exhibited in the Supplementary Fig. 8. Finally, we present the ΔCFS values produced by coseismic deformation (Supplementary Figs. 28 and 29). Although coseismic deformation can explain some of the upper-plate aftershocks exhibiting normal faulting (Supplementary Fig. 28b), it cannot account for the occurrence of nearby upper-plate aftershocks displaying diverse faulting styles, such as step thrust and normal faulting (Fig. 1b), nor can it explain the time-dependency of aftershocks in general.
Calculation of diffusivity and Omori-Utsu fit
We also obtain the upper-plate permeability indirectly from the aftershock migration front using a discrete source-point fluid diffusion model47. The relation of diffusivity and permeability is expressed as κ = Dϕμ/Kf where κ corresponds to the permeability, D is the diffusivity, ϕ the rock porosity, μ the dynamic viscosity, and Kf the pore fluid (water) bulk modulus56. D is obtained from the aftershock migration using \(r=\sqrt{4\pi D{t}_{e}}\) with r the hypocenter distance to the main shock and te the elapsed time since the main shock. Our regression gives a value of D = 60 m2/s and using crustal scale rock parameters of Kf = 2.8 GPa19,45, ϕ = 0.00547,82, and μ = 10−4 Pa s47,81, we obtain a permeability value of about 1 × 10−14 m2 (Supplementary Fig. 9). Although a value of D = 60 m2/s ( ~ 1 × 10−14 m2) is in agreement with the one we use in our study, as well as those used in previous studies in northern Chile45,47,69,88, and others globally38,39,82, we show that a simple discrete source-point fluid diffusion model cannot clearly explain the aftershock migration front, as pointed out by other studies in subduction zones17.
We fit the cumulative number of aftershocks N(t) following the description of Utsu et al.57 as:
where Kaf, p, and c are empirical values to fit the temporal sequence of the aftershocks, and t is the time of the aftershock occurrence. Following Miller39, we normalized the aftershock sequence and therefore we set the productivity parameter Kaf = 1. We thus invert for c and p using the aftershock sequences in sub volumes R1 and R2.
Ethics
This work involves the participation of Chilean, Italian, German, English, and Swiss researchers.
Data availability
The authors declare that all data supporting the findings of this study are accessible from published studies, as listed in the Methods section. Correspondence and request for materials should be addressed to Carlos Peña at one of the following email addresses: carlosp@gfz.de or carlos.pena.1@uni-potsdam.de.
Code availability
The numerical simulations were carried out using the software ABAQUSTM version 6.14, which is available on the Dassault Systémes website (https://www.3ds.com/products-services/simulia/products/abaqus/). Codes and models developed in this study to simulate stress and pore-pressure changes are available from the corresponding author upon request.
References
Omori, F. On the after-shocks of earthquakes. Ph.D. thesis, The University of Tokyo (1895).
Toda, S., Stein, R. S. & Lin, J. Widespread seismicity excitation throughout central Japan following the 2011 M= 9.0 Tohoku earthquake and its interpretation by coulomb stress transfer. Geophys. Res. Lett. 38, https://doi.org/10.1029/2011GL047834 (2011).
Sippl, C., Schurr, B., Asch, G. & Kummerow, J. Seismicity structure of the Northern Chile forearc from >100,000 double-difference relocated hypocenters. J. Geophys. Res.: Solid Earth 123, 4063–4087 (2018).
Hardebeck, J. L. et al. Aftershock forecasting. Ann. Rev. Earth Planetary Sci. 52, 61–84 (2024).
Lupi, M. & Miller, S. A. Short-lived tectonic switch mechanism for long-term pulses of volcanic activity after mega-thrust earthquakes. Solid Earth 5, 13–24 (2014).
Lange, D. et al. Aftershock seismicity of the 27 February 2010 Mw 8.8 Maule earthquake rupture zone. Earth Planet. Sci. Lett. 317, 413–425 (2012).
Gomberg, J. & Sherrod, B. Crustal earthquake triggering by modern great earthquakes on subduction zone thrusts. J. Geophys. Res.: Solid Earth 119, 1235–1250 (2014).
Soto, H. et al. Probing the Northern Chile megathrust with seismicity: The 2014 M8.1 Iquique earthquake sequence. J. Geophys. Res.: Solid Earth 124, 12935–12954a (2019).
Nakamura, W., Uchida, N. & Matsuzawa, T. Spatial distribution of the faulting types of small earthquakes around the 2011 Tohoku-oki earthquake: A comprehensive search using template events. J. Geophys. Res.: Solid Earth 121, 2591–2607 (2016).
Freed, A. M. Earthquake triggering by static, dynamic, and postseismic stress transfer. Annu. Rev. Earth Planet. Sci. 33, 335–367 (2005).
Melnick, D. et al. Hidden Holocene slip along the coastal El Yolki fault in central Chile and its possible link with megathrust earthquakes. J. Geophys. Res.: Solid Earth 124, 7280–7302 (2019).
Jara-Muñoz, J. et al. The cryptic seismic potential of the Pichilemu blind fault in Chile revealed by off-fault geomorphology. Nat. Commun. 13, 3371 (2022).
Wang, K. et al. Stable forearc stressed by a weak megathrust: Mechanical and geodynamic implications of stress changes caused by the M= 9 Tohoku-oki earthquake. J. Geophys. Res.: Solid Earth 124, 6179–6194 (2019).
Dielforder, A. et al. Megathrust stress drop as trigger of aftershock seismicity: Insights from the 2011 Tohoku earthquake, Japan. Geophys. Res. Lett. 50, e2022GL101320 (2023).
Peña, C. et al. Role of Poroelasticity During the Early Postseismic Deformation of the 2010 Maule Megathrust Earthquake. Geophys. Res. Lett. 49, e2022GL098144 (2022).
Cattania, C., Hainzl, S., Wang, L., Enescu, B. & Roth, F. Aftershock triggering by postseismic stresses: A study based on Coulomb rate-and-state models. J. Geophys. Res.: Solid Earth 120, 2388–2407 (2015).
Chalumeau, C. et al. Seismological evidence for a multifault network at the subduction interface. Nature 628, 558–562 (2024).
Perfettini, H., Frank, W., Marsan, D. & Bouchon, M. Updip and along-strike aftershock migration model driven by afterslip: Application to the 2011 Tohoku-Oki aftershock sequence. J. Geophys. Res.: Solid Earth 124, 2653–2669 (2019).
Peña, C. et al. Impact of power-law rheology on the viscoelastic relaxation pattern and afterslip distribution following the 2010 Mw 8.8 Maule earthquake. Earth Planet. Sci. Lett. 542, 116292 (2020).
Hughes, K. L., Masterlark, T. & Mooney, W. D. Poroelastic stress-triggering of the 2005 M8.7 Nias earthquake by the 2004 M9.2 Sumatra-Andaman earthquake. Earth Planet. Sci. Lett. 293, 289–299 (2010).
Wang, K., Hu, Y. & He, J. Deformation cycles of subduction earthquakes in a viscoelastic Earth. Nature 484, 327 (2012).
Avouac, J.-P. From geodetic imaging of seismic and aseismic fault slip to dynamic modeling of the seismic cycle. Annu. Rev. Earth Planet. Sci. 43, 233–271 (2015).
Pollitz, F. F., Bürgmann, R. & Banerjee, P. Post-seismic relaxation following the great 2004 sumatra-andaman earthquake on a compressible self-gravitating earth. Geophys. J. Int. 167, 397–420 (2006).
Govers, R., Furlong, K., Van de Wiel, L., Herman, M. & Broerse, T. The geodetic signature of the earthquake cycle at subduction zones: Model constraints on the deep processes. Rev. Geophysics 56, 6–49 (2018).
Weiss, J. R. et al. Illuminating subduction zone rheological properties in the wake of a giant earthquake. Sci. Adv. 5, eaax6720 (2019).
Hu, Y., Bürgmann, R., Freymueller, J. T., Banerjee, P. & Wang, K. Contributions of poroelastic rebound and a weak volcanic arc to the postseismic deformation of the 2011 tohoku earthquake. Earth, Planets Space 66, 1–10 (2014).
Agata, R. et al. Rapid mantle flow with power-law creep explains deformation after the 2011 Tohoku mega-quake. Nat. Commun. 10, 1–11 (2019).
McCormack, K., Hesse, M. A., Dixon, T. & Malservisi, R. Modeling the contribution of poroelastic deformation to postseismic geodetic signals. Geophys. Res. Lett. 47, e2020GL086945 (2020).
Sun, T. et al. Prevalence of viscoelastic relaxation after the 2011 tohoku-oki earthquake. Nature 514, 84–87 (2014).
Luo, H. & Wang, K. Finding simplicity in the complexity of postseismic coastal uplift and subsidence following great subduction earthquakes. J. Geophys. Res.: Solid Earth 127, e2022JB024471 (2022).
Klein, E., Fleitout, L., Vigny, C. & Garaud, J.-D. Afterslip and viscoelastic relaxation model inferred from the large-scale post-seismic deformation following the 2010 m w 8.8 maule earthquake (chile). Geophys. J. Int. 205, 1455–1472 (2016).
Nur, A. & Booker, J. R. Aftershocks caused by pore fluid flow? Science. (N. Y., NY) 175, 885–7 (1972).
Ellsworth, W. L. Injection-induced earthquakes. Science 341, 1225942 (2013).
Yu, H., Harrington, R. M., Kao, H., Liu, Y. & Wang, B. Fluid-injection-induced earthquakes characterized by hybrid-frequency waveforms manifest the transition from aseismic to seismic slip. Nat. Commun. 12, 1–11 (2021).
Goebel, T., Weingarten, M., Chen, X., Haffener, J. & Brodsky, E. The 2016 Mw5. 1 Fairview, Oklahoma earthquakes: Evidence for long-range poroelastic triggering at> 40 km from fluid disposal wells. Earth Planet. Sci. Lett. 472, 50–61 (2017).
Shapiro, S. A., Huenges, E. & Borm, G. Estimating the crust permeability from fluid-injection-induced seismic emission at the ktb site. Geophys. J. Int. 131, F15–F18 (1997).
Geoffroy, L. et al. Hydrothermal fluid flow triggered by an earthquake in Iceland. Commun. Earth Environ. 3, 1–9 (2022).
Miller, S. A. et al. Aftershocks driven by a high-pressure CO2 source at depth. Nature 427, 724–7 (2004).
Miller, S. A. Aftershocks are fluid-driven and decay rates controlled by permeability dynamics. Nat. Commun. 11, 5787 (2020).
Bosl, W. & Nur, A. Aftershocks and pore fluid diffusion following the 1992 Landers earthquake. J. Geophys. Res.: Solid Earth 107, ESE–17 (2002).
Lindman, M., Lund, B. & Roberts, R. Spatiotemporal characteristics of aftershock sequences in the south iceland seismic zone: interpretation in terms of pore pressure diffusion and poroelasticity. Geophys. J. Int. 183, 1104–1118 (2010).
Gunatilake, T. Dynamics between earthquakes, volcanic eruptions, and geothermal energy exploitation in japan. Sci. Rep. 13, 4625 (2023).
Warren-Smith, E. et al. Episodic stress and fluid pressure cycling in subducting oceanic crust during slow slip. Nat. Geosci. 12, 475–481 (2019).
Peacock, S. A. Fluid processes in subduction zones. Science 248, 329–337 (1990).
Koerner, A., Kissling, E. & Miller, S. A. A model of deep crustal fluid flow following the Mw = 8.0 Antofagasta, Chile, earthquake. J. Geophys. Res.: Solid Earth 109, https://doi.org/10.1029/2003JB002816 (2004).
Husen, S. & Kissling, E. Postseismic fluid flow after the large subduction earthquake of Antofagasta, Chile. Geology 29, 847–850 (2001).
Shapiro, S., Patzig, R., Rothert, E. & Rindschwentner, J. Triggering of seismicity by pore-pressure perturbations: Permeability-related signatures of the phenomenon. Pure Appl. Geophys. 160, 1051–1066 (2003).
Amezawa, Y., Maeda, T. & Kosuga, M. Migration diffusivity as a controlling factor in the duration of earthquake swarms. Earth, Planets Space 73, 1–11 (2021).
Waldhauser, F., Schaff, D. P., Diehl, T. & Engdahl, E. R. Splay faults imaged by fluid-driven aftershocks of the 2004 Mw 9.2 Sumatra-Andaman earthquake. Geology 40, 243–246 (2012).
Schurr, B. et al. Gradual unlocking of plate boundary controlled initiation of the 2014 Iquique earthquake. Nature 512, 299–302 (2014).
Hoffmann, F. et al. Characterizing afterslip and ground displacement rate increase following the 2014 Iquique-Pisagua Mw 8.1 earthquake, Northern Chile. J. Geophys. Res.: Solid Earth 123, 4171–4192 (2018).
Socquet, A. et al. An 8 month slow slip event triggers progressive nucleation of the 2014 Chile megathrust. Geophys. Res. Lett. 44, 4046–4053 (2017).
Jara, J., Socquet, A., Marsan, D. & Bouchon, M. Long-term interactions between intermediate depth and shallow seismicity in north chile subduction zone. Geophys. Res. Lett. 44, 9283–9292 (2017).
Barbot, S. Frictional and structural controls of seismic super-cycles at the Japan trench. Earth, Planets Space 72, 1–25 (2020).
Shrivastava, M. N. et al. Earthquake segmentation in northern Chile correlates with curved plate geometry. Sci. Rep. 9, 1–10 (2019).
Wang, H. Theory of linear poroelasticity with applications to geomechanics and hydrogeology, vol. 2 (Princeton university press, 2000).
Utsu, T. & Ogata, Y. et al. The centenary of the Omori formula for a decay law of aftershock activity. J. Phys. Earth 43, 1–33 (1995).
Halpaap, F. et al. Earthquakes track subduction fluids from slab source to mantle wedge sink. Sci. Adv. 5, eaav7369 (2019).
Bloch, W. et al. The 2015–2017 Pamir earthquake sequence: foreshocks, main shocks and aftershocks, seismotectonics, fault interaction and fluid processes. Geophys. J. Int. 233, 641–662 (2023).
Zhang, X. & Shcherbakov, R. Power-law rheology controls aftershock triggering and decay. Sci. Rep. 6, 1–9 (2016).
Mouslopoulou, V. et al. Earthquake Swarms, Slow Slip and Fault Interactions at the Western-End of the Hellenic Subduction System Precede the Mw 6.9 Zakynthos Earthquake, Greece. Geochem., Geophysics, Geosystems 21, e2020GC009243 (2020).
Sibson, R. H. Stress switching in subduction forearcs: Implications for overpressure containment and strength cycling on megathrusts. Tectonophysics 600, 142–152 (2013).
Nanjo, K. et al. Decay of aftershock activity for japanese earthquakes. J. Geophys. Res.: Solid Earth 112, B08309 (2007).
Dieterich, J. A constitutive law for rate of earthquake production and its application to earthquake clustering. J. Geophys. Res.: Solid Earth 99, 2601–2618 (1994).
Ben-Zion, Y. & Lyakhovsky, V. Analysis of aftershocks in a lithospheric model with seismogenic zone governed by damage rheology. Geophys. J. Int. 165, 197–210 (2006).
Shcherbakov, R. & Turcotte, D. L. A damage mechanics model for aftershocks. Pure Appl. Geophys. 161, 2379–2391 (2004).
Tung, S. & Masterlark, T. Delayed poroelastic triggering of the 2016 October Visso earthquake by the August Amatrice earthquake, Italy. Geophys. Res. Lett. 45, 2221–2229 (2018).
Manga, M. et al. Changes in permeability caused by transient stresses: Field observations, experiments, and mechanisms. Rev. Geophys. 50, RG2004 (2012).
Gomila, R. et al. Palaeopermeability anisotropy and geometrical properties of sealed-microfractures from micro-CT analyses: An open-source implementation. Micron 117, 29–39 (2019).
Gunatilake, T. & Miller, S. A. Spatio-temporal complexity of aftershocks in the apennines controlled by permeability dynamics and decarbonization. J. Geophys. Res.: Solid Earth 127, e2022JB024154 (2022).
Terakawa, T., Hashimoto, C. & Matsu’ura, M. Changes in seismic activity following the 2011 Tohoku-oki earthquake: effects of pore fluid pressure. Earth Planet. Sci. Lett. 365, 17–24 (2013).
Hayes, G. P., Wald, D. J. & Johnson, R. L. Slab1. 0: A three-dimensional model of global subduction zone geometries. J. Geophys. Res. Solid Earth 117, https://doi.org/10.1029/2011JB008524 (2012).
Bevis, M. & Brown, A. Trajectory models and reference frames for crustal motion geodesy. J. Geod. 88, 283–311 (2014).
Tassara, A. & Echaurren, A. Anatomy of the Andean subduction zone: three-dimensional density model upgraded and compared against global-scale models. Geophys. J. Int. 189, 161–168 (2012).
Li, S. et al. Spatiotemporal variation of mantle viscosity and the presence of cratonic mantle inferred from 8 years of postseismic deformation following the 2010 maule, chile, earthquake. Geochem. Geophys. Geosys. 19, 3272–3285 (2018).
Hirth, G. & Kohlstedf, D. Rheology of the upper mantle and the mantle wedge: A view from the experimentalists. Geophys. Monogr.-Am. Geophys. union 138, 83–106 (2003).
Springer, M. Interpretation of heat-flow density in the Central Andes. Tectonophysics 306, 377–395 (1999).
Peña, C. et al. Role of Lower Crust in the Postseismic Deformation of the 2010 Maule Earthquake: Insights from a Model with Power-Law Rheology. Pure Appl. Geophys. 176, 3913–3928 (2019).
Altmann, J. B., Müller, T. M., Müller, B. I., Tingay, M. R. & Heidbach, O. Poroelastic contribution to the reservoir stress path. Int. J. Rock. Mech. Min. Sci. 47, 1104–1113 (2010).
Masterlark, T. Finite element model predictions of static deformation from dislocation sources in a subduction zone: Sensitivities to homogeneous, isotropic, poisson-solid, and half-space assumptions. J. Geophys. Res.: Solid Earth 108, 2540 (2003).
Mukuhira, Y., Uno, M. & Yoshida, K. Slab-derived fluid storage in the crust elucidated by earthquake swarm. Commun. Earth Environ. 3, 286 (2022).
Frank, W. B. et al. Along-fault pore-pressure evolution during a slow-slip event in guerrero, mexico. Earth Planet. Sci. Lett. 413, 135–143 (2015).
Beeler, N., Simpson, R., Hickman, S. & Lockner, D. Pore fluid pressure, apparent friction, and Coulomb failure. J. Geophys. Res.: Solid Earth 105, 25533–25542 (2000).
Okada, Y. Surface deformation due to shear and tensile faults in a half-space. Bull. seismological Soc. Am. 75, 1135–1154 (1985).
Li, S., Moreno, M., Bedford, J., Rosenau, M. & Oncken, O. Revisiting viscoelastic effects on interseismic deformation and locking degree: A case study of the Peru-North Chile subduction zone. J. Geophys. Res.: Solid Earth 120, 4522–4538 (2015).
Peña, C., Heidbach, O., Moreno, M., Melnick, D. & Oncken, O. Transient deformation and stress patterns induced by the 2010 Maule earthquake in the Illapel segment. Front. Earth Sci. 9, 644834 (2021).
Heidbach, O., Ziegler, M. & Stromeyer, D. Manual of the tecplot 360 add-on geostress v2. 0. https://doi.org/10.2312/wsm.2020.001 (2020).
Nippress, S. & Rietbrock, A. Seismogenic zone high permeability in the Central Andes inferred from relocations of micro-earthquakes. Earth Planet. Sci. Lett. 263, 235–245 (2007).
Acknowledgements
This work was supported by the project “Present-day Kinematics of the Southern and Eastern Alps (ALPSHAPE),” funded by the DFG, Germany, 442567237 (S. M., C. P.); the project “Slip Budget in Subduction Zones Illuminated by Geodetic Measurements and Earthquake Cycle Deformation Modeling (STRONG),” funded by the DFG, Germany, 541650676 (C. P.); and the Postdoc-Bridge program, postdoctoral scholarship, funded by the University of Potsdam, Germany (C. P.). M. M. acknowledges support from FONDECYT 1221507. J. B.’s contribution was funded by the European Union with ERC grant (TectoVision, 101042674). Views and opinions expressed are however those of the author(s) only and do not necessarily reflect those of the European Union or the European Research Council Executive Agency. Neither the European Union nor the granting authority can be held responsible for them.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Contributions
C. P. and O. H. conceived and elaborated on the original. C. P. and M. M. constructed the finite-element model. C. P. conducted all the numerical simulations and the geodetic afterslip inversion. C. P. and O. H. performed the analysis of stress and pore-pressure changes. C. P., M. M., J. B., and S. M. performed the GNSS time-series analysis. O. H., O. O., and C. F. provided knowledge about structural geology and pore-pressure diffusion processes. C. P. and B. S. compiled and analyzed seismicity and focal mechanisms. C. P., O. H., S. M., J. B., and C. F. provided funding to carry out the research. C. P. wrote the manuscript with comments from all authors.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks Timothy Masterlark, Jeffrey Freymueller and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Peña, C., Heidbach, O., Metzger, S. et al. Pore-pressure diffusion controls upper-plate aftershocks of the 2014 Iquique earthquake. Nat Commun 16, 9474 (2025). https://doi.org/10.1038/s41467-025-65013-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41467-025-65013-6
