
Abstract
Active particles are analogs of microorganisms in that they locally dissipate energy to propel in low Reynolds number fluids. However, most active particles lack the ability to undergo controlled shape transformations that change how they move in response to environmental cues. Here, we present a class of stimuli-responsive active particles that exhibit fully reversible, shape-dependent propulsion. The particles consist of a bilayer of a thermoresponsive hydrogel and a non-swelling glassy polymer, patterned into rectangular microscale prisms. Temperature changes near the phase transition of hydrogel cause large curvature shifts, from flat plates at 35 °C to crescent shapes at 20 °C, accompanied by changes in effective polarizability. When powered by AC electric fields, this coupling between geometry and polarizability enables programmable propulsion modes including linear and helical motions. Sequential temperature changes allow encoded in situ steering, establishing a design principle for microscale active systems capable of adaptive propulsion and reconfiguration.
Similar content being viewed by others


Introduction
Microorganisms adapt their shape in response to their environment, enhancing their proliferation and survival1,2,3,4. For instance, Tetrahymena thermophila, a unicellular organism within the ciliated Protozoa group, swims upwards, forming dense swarms near the surface of water where oxygen, food, and light are more abundant. Initially, cultures of Tetrahymena thermophila exposed to infrared light grow normally, but as food becomes scarce, the cells elongate into spindles, swim 50% faster than their normal counterparts, and follow straighter paths toward food sources5. This increased motility is crucial for their formation, growth, and survival.
Active particles are synthetic analogs of microorganisms by mimicking some of their dissipative behaviors6,7,8,9. Particularly, self-phoretic active particles create local gradients of energy along their surfaces, driving asymmetric fluid flows at the single-particle level10,11,12,13,14,15. Their mechanism of motion is inherent in their design, as they asymmetrically draw and dispel energy, generating local gradients of force that propel them16,17,18,19,20. Active particles hold enormous promise for applications such as drug delivery21,22,23,24, biosensing25,26, and environmental remediation27,28. Despite their usefulness, most active particle systems developed to date are geometrically rigid, unable to change their shape in response to external stimuli due to difficulties in fabricating and controlling shape-morphing soft materials at the microscale29. We note one intriguing exception involving clusters of swelling and non-swelling microspheres that undergo electrokinetic propulsion16. Recently, stimuli-responsive polymers that change properties in response to environmental conditions have led to applications as smart materials30,31,32,33,34, including biomedical devices32,35,36,37,38,39, flexible electronics40,41,42,43, sensors44,45,46, and actuators47,48,49,50.
In this article, we present a class of shape-morphing active particles fabricated by layering a rigid polymer with a thermoresponsive hydrogel. Particles were fabricated by sequential spin-coating of the two materials followed by planar lithography, enabling fabrication of surface- and shape-anisotropic particles composed of polymers with different material properties. As a model system, we created bilayer particles that can morph from quasi-rectangular prisms to crescent- or donut-like shapes due to significant swelling of the hydrogel layer. We used AC electric fields to drive particle motion and studied how changes in temperature led to variations in effective polarizability, shape anisotropy, and resultant trajectories51,52,53. When an AC field is applied, the particles align with a preferred orientation to minimize energy between the induced polarization of the particles and the external field54,55. Distinguished from most reported active particles with a single, fixed powering layer—such as a metal patch of a Janus particle—we demonstrate that the powering surface can be dynamically switched by modulating the effective polarizability of the swelling layer, while the rigid layer remains unchanged.
By combining an asymmetric particle shape with controlled tuning of the effective polarizability between the two layers, we encode linear to nonlinear trajectories of the particle by modulating the temperature. At low Reynolds numbers, reciprocal shape changes alone cannot generate net motion due to time-reversal symmetry, as described by Purcell’s scallop theorem19,56,57. In our system, the applied AC electric field breaks this symmetry by inducing microscale fluid flows around the particles that are temperature-dependent. This coupling enables controlled propulsion and steering, distinguishing our approach from passive shape-morphing systems. We discuss several non-trivial findings relevant to configuring temperature-controlled propulsion in AC electric fields. While we propose that induced-charge electrophoresis (ICEP)58,59,60 plays a dominant role, other factors, such as concentration polarization electrophoresis (CPEP)61 and temperature-dependent ionic conductivity of the hydrogel layer62 may also contribute. While hydrogel-based shape-morphing has been extensively explored using diverse stimuli such as temperature, pH, light, and electric fields, these systems typically exploit static or reversible shape changes without propulsion. Unlike previous studies, including two recent works63,64, our system couples reversible hydrogel bending with electric field-driven active propulsion. This integration enables not only shape transformation but also tunable, directionally controlled motion and trajectory switching—advancing shape-morphing materials into the domain of microscale active matter. Our findings provide a fundamental basis to program the electrokinetic motions of shape-morphing particles for manipulating and steering at the single-particle-level.
Results
Fabrication and propulsion of shape-morphing particles
A landmark example of particle propulsion in an AC electric field is linearly propelling metallodielectric Janus particles65. Fabrication of such particles typically involves formulating spherical particles through chemical methods, assembling them on a substrate, and vacuum deposition of metal patches25,55,66,67. In contrast, the methods used to create the non-spherical shape-morphing particles described in this study involve fewer steps. Bilayer particles were fabricated by spin-coating a glassy polymer, poly(p-methyl styrene-co-acrylamidobenzophenone (PpMS-BP), and a thermoresponsive polymer, poly(N, N-diethylacrylamide-acrylic acid- acrylamidobenzophenone-2-(methacryloyloxy) ethyl rhodamine B) copolymer (PDEAM-BP), onto a substrate, followed by patterning via maskless lithography68. PpMS-BP, being a rigid, non-swelling polymer, fixes the dimension of one side of the bilayer system, while PDEAM-BP, a polymer with a volume phase transition temperature (VPTT), exhibits a temperature-dependent swelling response (Fig. 1) that drives particle curvature. The swelling behavior of PDEAM-BP is governed by hydrophobic interactions and water solvation. At temperatures above its VPTT, hydrophobic interactions between polymer chains dominate, causing the polymer chains to aggregate and water to be expelled, resulting in deswelling of the hydrogel. Conversely, below this temperature, the polymer chains interact favorably with water molecules, allowing the hydrogel to swell. This is because hydrated polymer chains form stable structures through hydrogen bonding and solvation with water molecules69. The VPTT can be modulated by copolymerization with hydrophilic or hydrophobic moieties within the polymer network70. Though PDEAM-BP contains both hydrophilic acrylic acid and hydrophobic BP at equal molar content (7 mol.%), the VPTT of PDEAM-BP is significantly shifted downward to approximately 22 °C, which is about 10 °C lower than that of neat PDEAM-BP. This pronounced lowering of the VPTT suggests that the hydrophobic effect of the BP moiety outweighs the hydrophilic contribution of acrylic acid. The BP moiety—with its two phenyl rings and bulky structure—likely promotes hydrophobic interactions, thereby driving the VPTT to a lower temperature. Though the VPTT behavior is not strongly influenced by crosslink density, the swelling ratio of PDEAM-BP does depend on the crosslink density, which can be controlled by the UV exposure dose. In this study, the PDEAM-BP exhibited a swelling ratio of \(\approx\)1.8 (Supplementary Fig. 1).

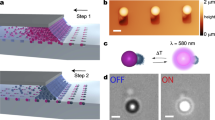
A PDEAM-BP is a stimuli-responsive swellable hydrogel, and PpMS-BP is a glassy polymer. B Schematic representation illustrating fabrication of shape-morphing particles from a bilayer of PpMS-BP (rigid layer) and PDEAM-BP (swelling layer) by UV-crosslinking and developing. C Bending curvature of a shape-morphing particle (black circles) and linear swelling ratio of PDEAM-BP, defined as the ratio in diameter of a PDEAM-BP sample compared to that in its dry state (blue squares), as a function of solution temperature. Data points represent mean values, and error bars indicate mean ± SD (n = 5). D Fluorescent microscope images showing reversible bending of a bilayer particle upon decreasing temperature across VPTT.
To fabricate bilayer particles, we first spin-coated an aqueous solution of poly(vinyl alcohol) (PVA) as a water-soluble sacrificial layer on a substrate. Then, a solution of PpMS-BP in toluene was spin-coated to form a rigid layer (100 nm thickness). Subsequently, a solution of PDEAM-BP in 1-propanol was spin-coated to form the swelling layer (2 μm thickness). The bilayer film was photopatterned to create an array of 40 μm x 4 μm rectangles using maskless lithography (Fig. 1B). After unexposed regions were removed with a developing solution, the rectangular-shaped bilayer particles remained on the sacrificial layer of PVA (Supplementary Fig. 2).
The bilayer particles were dispersed in water, and their shape-morphing behaviors were monitored using a fluorescent microscope equipped with a temperature-controlled stage. Upon their release from the substrate and dispersion in water at 35 °C, the particles retained the shape of a quasi-rectangular prism. Decreasing the solution temperature to 15 °C, the particles morphed to a crescent shape. Further decreasing the temperature below 5 °C, the particles attained a donut-like shape where the two ends of each particle met. Bending curvature of each particle was calculated from the diameter of a circle drawn over the particle (d-1) to analytically express changes in shape (Fig. 1C). Upon decreasing the temperature below the VPTT of PDEAM-BP, the PDEAM-BP layer absorbs water and swells, while the PpMS-BP layer remains volumetrically stable, creating a mismatch in expansion. This swelling-induced strain progressively drives the shape transformation of the bilayer particles. Initially, the rod-shaped particles bend into a crescent shape due to differential swelling across two layers. As swelling continues and strain increases, the particles undergo further transformation, ultimately bending to a donut shape (Fig. 1D, Supplementary Movie 1). To evaluate fatigue resistance and interfacial stability of the bilayer microparticles, we subjected them to 10 repeated cycles of heating (35 °C) and cooling (5 °C). The shape morphing remained fully reversible with no observable loss in curvature. Additionally, no delamination or separation between the PDEAM-BP hydrogel and the PpMS layer was observed, confirming robust adhesion and mechanical integrity under cyclic thermal loads (Supplementary Fig. 3).
After the particles were released from the substrate, they were dispersed in water to form an aqueous suspension. This solution was introduced into the gap of a coplanar electrode setup (Fig. 2A). Upon applying an AC electric field, the preferred orientations of the particles and their active motions were observed and recorded. The observed propulsion occurs in the low-frequency regime (~300 Hz), consistent with reports of electrokinetically driven motion of asymmetric particles in similar conditions58. While the precise mechanism remains under investigation, our coplanar electrode geometry reduces the likelihood of significant electrohydrodynamic flows, which typically arise from steep field gradients near electrodes71,72,73,74,75. We observed that bilayer particles assumed different preferred orientations with respect to the electric field direction according to their shape (Fig. 2B) and exhibited unique active motions when subjected to AC electric fields (Fig. 2C–G, Supplementary Movie 2). At 35 °C, particles assumed a rod-shape, where their major axis aligned with the electric field, and the particles displayed no further motion. The lack of motion is believed to arise from the orientation of the particles, where the PpMS layer positions against the substrate. Upon cooling the solution to 25 °C, the PDEAM-BP layer swelled, inducing a bend in the particles to a boomerang-shape. Under an AC electric field, the particles are propelled longitudinally (i.e., perpendicular to the applied field direction). The PDEAM-BP layer was oriented toward the back, suggesting that this layer is more polarizable than PpMS-BP at higher temperatures, driving propulsion through ICEP, which we investigate in more detail as follows. At 17 °C, further swelling transformed the particles into a crescent-shape. In this conformation, particles exhibited 3D helical motions with their major axis aligned with the AC electric field, as the PDEAM-BP layer continued to push the particles forward.

A Schematic representation showing the experimental setup of coplanar electrodes on an inverted fluorescent microscope and a temperature-controlled stage. B Fluorescent microscope images showing the preferred orientation of bilayer particles exhibiting each shape in AC electric fields. C–G. Fluorescent microscope image showing (C) alignment and no motion of a rod-shaped particle at 35 °C, (D) no alignment and no motion of a donut-shaped particle at 5 °C, (E) alignment and linear motion of a boomerang-shaped particle at 25 °C swimming orthogonal to the applied field (along the x-axis), (F) alignment and 3D helical motion of a crescent-shaped particle at 17 °C, and (G) alignment and linear motion of a horseshoe-shaped particle at 10 °C swimming parallel to the applied field (along the y-axis). H, I. Displacement of bilayer particles at different temperatures on the (H) x-coordinate and (I) y-coordinate. The AC electric field in (B–I) was 400 V cm−1 at 300 Hz. J Linear speed of boomerang-shaped particles as a function of electric field intensity squared at 300 Hz. Circled dots are experimental values; the red line indicates the best fit. Data points represent mean values, and error bars indicate mean ± SD (n = 6). Scale = 20 µm.
Cooling the solution further to 10 °C resulted in a more pronounced bend, creating a horseshoe-shape. Interestingly, the particles reoriented such that their minor axis aligned with the applied field, and the direction of propulsion changed laterally (i.e., parallel to the applied field direction), whereby the PpMS-BP layer was oriented toward the back, suggesting that this layer is more effectively polarizable than the PDEAM-BP at lower temperatures. Below 5 °C, the particles fully bent into a donut-shape, achieving a near-isotropic geometry. In this conformation, particles no longer exhibited preferential alignment or active motion in the electric field. For boomerang-shaped particles, the speed of the particles in the y-direction remained near zero, while the position of the particles in the x-direction increased linearly at a constant rate. For crescent-shaped particles, the position of the particles oscillated along the x-direction while steadily increasing in the y-direction, consistent with the characteristics of helical motions. This helical trajectory is particularly interesting, as it suggests that the motion arises from asymmetric fluid flow in both the x- and y-directions near the particle, indicating complex fluid interactions influenced by both the PDEAM-BP and PpMS-BP layers (discussed later)55. For horseshoe-shaped particles, the speed of particles in the x-direction was approximately zero, while the position of the particles in the y-direction increased linearly at a constant rate (Fig. 2H, I). For boomerang-shaped particles, we measured the speeds of the particles at different field strengths. The relationship between speed and the square of the applied field strength was fit well by a linear model (R2 = 0.992) (Fig. 2J).
To more closely investigate the mechanism of propulsion of the shape-morphing bilayer particles in AC electric fields, we fabricated non-shape-morphing block-shaped particles by spin-coating uniformly thick layers of PpMS-BP and PDEAM-BP, each approximately 0.5 μm thick (Supplementary Fig. 4). These particles retained a fixed geometry under varying temperature conditions, allowing us to isolate the effects of induced polarizability via the applied electric field from particle shape on propulsion dynamics. When subjected to an AC electric field (340 V cm−1 at 300 Hz) at 22 °C, the block-shaped particles exhibited 3D helical motions (Supplementary Fig. 5, Supplementary Movie 3), which we attribute to multiaxial asymmetric fluid flows around the particles (Fig. 3A). Tangential speeds of the block-shaped particles were measured as a function of the square of the applied electric field strength. The observed linear relationship between particle speed and the square of the field strength confirmed that ICEP is the primary mechanism driving particle locomotion (Fig. 3B)65. This characteristic dependence reflects the ability of the particles to polarize in an AC electric field, creating asymmetric ion flows that propel it through the surrounding fluid. To assess temperature-dependent behaviors, we measured propulsion velocities of both shape-morphing and non-shape-morphing bilayer particles at 10 °C and 25 °C. Shape-morphing particles exhibited a significantly higher propulsion speed at 25 °C, with an average increase of ~4 µm s−1 compared to their speed at 10 °C. In contrast, non-shape-morphing particles showed no significant change in propulsion velocity across the same temperature range (Supplementary Fig. 6). We note that PDEAM-BP was found to orient toward the rear at 25 °C and toward the front at 10 °C; however, for the non-shape-morphing bilayer particles, we could not visualize orientation during propulsion. This result may be attributed to the asymmetric bilayer structure, particularly the thicker PDEAM-BP hydrogel layer in the shape-morphing particles, which is expected to play a key role in enhancing propulsion through temperature-induced changes in dielectric properties and polarizability mismatch.

A Schematic representation describing the dimensions of the non-shape-morphing block-shaped particles. Upon application of an AC electric field, the block-shaped particles propel with a 3D helical motion. B Tangential speeds of block-shaped particles as a function of AC electric field strength squared at 300 Hz. Circled dots are experimental values; the red line indicates the best fit using a linear model. Inset (top): SEM image showing block-shaped particles. Inset (bottom): Schematic representation of the propulsion of a block-shaped particle. The electric double layer on the PDEAM-BP side is more strongly polarized at temperatures above the VPTT of PDEAM-BP and results in a stronger ICEO slip (arrows) than the PpMS-BP side, driving ICEP. Data points represent mean values, and error bars indicate mean ± SD (n = 6). C Schematic representation of coplanar electrodes with an optical micrograph of the electrode gap for analysis. D Schematic illustration of equilibrium particle positions displaying nDEP and pDEP behavior. E Trajectory of a single PDEAM-BP particle. F Normalized probability distribution for the PDEAM-BP particle in (E). G Relative potential energy landscape for the PDEAM-BP particle in (E, F). Dots indicate experimental values; the red line is the best fit to the Boltzmann equation. Representative results in (E–G) are measured below the CPST (5 °C) in a 500 V cm−1 electric field at 200 kHz. H Re[CM] of PpMS-BP and PDEAM-BP at 5 °C and 30 °C, which is below and above the CPST. Data points represent mean values, and error bars indicate mean ± SE (n = 3). I. Video microscopy images showing equilibrated position of a PpMS-BP particle at 22 °C, a PDEAM-BP particle at 5 °C, and a PDEAM-BP particle at 30 °C within the coplanar electrode gap.
Invertible effective polarizability of PDEAM-BP
The observations above suggest that upon cooling of the sample from 35 °C to 5 °C, the bilayer shows ‘invertible polarizability’, a term we use to describe the temperature-dependent reversal in the relative effective polarizability between the two layers of the bilayer particle. This difference in effective polarizability—quantified by the real part of the Clausius–Mossotti (CM) factor—can change sign as the PDEAM-BP hydrogel layer swells or deswells. This results in an inversion in the direction of the induced dipole moment across the particle, relative to the non-responsive PpMS-BP layer. The effective polarizability of a polymer particle is typically governed not only by dielectric permittivity but also by transport of ions associated with the electrical double layer (EDL) at the particle surface76,77. At low frequencies, ion transport is sufficiently rapid to enable polarization across the particle dimensions, leading to a much larger dipole moment than due to dielectric polarization, and therefore an effective polarizability higher than that of the surrounding aqueous medium. At sufficiently high frequencies, ions do not have time to redistribute, and the response of the particle is dominated by dielectric polarization, leading to an effective polarizability lower than water.
To shed further light on these effects, we characterized the polarizability differences between the two materials at different temperatures. First, we fabricated cubic particles (2 μm \(\times\) 2 μm \(\times\) 2 μm) composed entirely of PDEAM-BP or PpMS-BP. Following the methods outlined78, we experimentally measured the real component of the CM factor, Re[CM] of each material, by analyzing the interactions between the induced dipole formed in the particle and the applied electric field. This was achieved by tracking the dielectrophoretic (DEP) response of each type of particle in a non-uniform electric field. DEP experiments were conducted using a trapping chamber mounted on a coplanar interdigitated electrode device (Fig. 3C, Supplementary Fig. 7). For experiments involving PDEAM-BP above and below its swelling-dependent critical polarizability solution temperature (CPST), revealing temperature-dependent changes in both the swelling ratio and polarizability of PDEAM-BP, the device was mounted on a temperature-controlled stage with continuous temperature monitoring. Samples were allowed to equilibrate for at least 5 min to enable particles to reach their approximate mechanical equilibrium height in the solution. After this settling period, a sinusoidal AC signal oscillating at 200 kHz was applied to the electrodes, generating an electric field strength of E0 = 200 – 500 V cm−¹. While we note that such DEP measurements cannot be reliably performed at the lower frequencies relevant to propulsion due to background fluid flows, they provide meaningful insight into the temperature-dependent polarizability transitions. At a given frequency, particles more polarizable than the suspending medium migrated to regions of the highest electric field strength at the electrode edges, a phenomenon known as positive dielectrophoresis (pDEP)78. Conversely, particles less polarizable than the medium migrated to regions of the lowest electric field strength in the center of the electrode gap, known as negative dielectrophoresis (nDEP)78. These DEP responses, dictated by the Re[CM], depend on the frequency and the relative polarizabilities of the particle and suspending medium (Fig. 3D). A frequency of 200 kHz was chosen for these experiments because DEP dominates transport mechanisms at this frequency, whereas electro-osmosis interferes at lower frequencies (100 Hz <ω < 100 kHz)78,79. By observing the DEP behavior, we quantified the polarizability differences between the bilayer components, providing critical insights into the role of material properties in particle motion.
Particle trajectories were extracted from 10 min video recordings through image analysis. The positions of individual particles were normalized relative to their neighboring electrode positions, resulting in normalized trajectories within the electrode gap (Fig. 3E, Supplementary Fig. 8 and Supplementary Movie 4). The normalized trajectories were then used to generate histograms of particle positions, capturing the probabilities of sampling within the electrode gap for each type of particle (Fig. 3F, Supplementary Fig. 8). The Boltzmann equation was applied to relate the sampling probabilities to the potential energy at each position relative to a chosen reference point (Supplementary Text). The reference point was selected based on the theoretical position where potential energy is minimized (i.e., the center of the electrode gap for nDEP and the edge of the electrodes for pDEP)78. Transforming the sampling probabilities using the Boltzmann equation produced the relative potential energy landscape within the electrode gap (Fig. 3G).
The theoretical net potential energy of a single particle in a high-frequency, non-uniform electric field simplifies to the interaction between the induced dipole and the electric field78. To determine the Re[CM] for PpMS-BP at 22 °C, a PDEAM-BP at 5 °C, and a PDEAM-BP at 30 °C, a nonlinear regression function was employed. The theoretical potential energy expression was fitted to the transformed experimental data, with Re[CM] as the sole adjustable parameter. The individually fitted Re[CM] values were averaged for each type of particle and subsequently used to calculate the real component of the effective polarizability77,80.
Our findings show that the thermoresponsive behavior of PDEAM-BP is associated with significant changes in the effective polarizability of the bilayer particles across its swelling-dependent CPST (Fig. 3H). Above the CPST, PDEAM-BP shows higher effective polarizability than the surrounding medium, exhibiting positive dielectrophoresis (pDEP) with Re[CM] = 0.36 (Fig. 3I). In contrast, below the CPST, PDEAM-BP becomes less polarizable than the medium, transitioning to negative DEP (nDEP) with Re[CM] = –0.15. The PpMS-BP layer maintains consistent behavior across temperatures, showing pDEP with Re[CM] = 0.03. While the underlying polarizability change is likely continuous due to gradual water uptake or expulsion from the thermoresponsive hydrogel (PDEAM-BP), our measurements focused on two discrete temperatures (5 °C and 30 °C) due to the DEP trapping time required per condition to collect sufficient data for analysis (Supplementary Text). Future studies may explore this continuum more thoroughly at different temperature conditions.
Although the effective polarizabilities measured at 200 kHz cannot be directly mapped onto the swimming behaviors measured at 300 Hz, the temperature-dependent changes in the effective polarizability of PDEAM-BP correlate well with the observed differences in propulsion direction and mode. At 25 °C, just above the CPST, the bilayer particles adopt a boomerang shape due to reduced swelling. In this state, PDEAM-BP maintains a higher polarizability than both the medium and the PpMS-BP layer, likely generating asymmetric flows that drive linear motion perpendicular to the electric field and away from the PDEAM-BP side. Below 12 °C, just below the CPST, the PDEAM-BP becomes less effectively polarizable, and the particle bends further into a horseshoe shape, whereby propulsion switches direction, now occurring parallel to the field and away from the more polarizable PpMS-BP layer.
To better understand the temperature-induced inversion in polarizability, we next consider changes in the electric double layer (EDL) by fabricating cubic particles (2 μm \(\times\) 2 μm \(\times\) 2 μm) composed entirely of PDEAM-BP or PpMS-BP and measuring their zeta potentials across a temperature range encompassing the CPST of PDEAM-BP (Fig. 4A), as spherical particles are not readily achievable using 2D lithography. While geometric anisotropy can influence zeta potential at smaller length scales or with highly elongated shapes, the electrokinetic behavior of micron-sized cubes is expected to be comparable to that of spheres. Thus, we interpret zeta potential values from these cubes as representative of particles with similar surface chemistry and dimensions81. The zeta potential of PpMS-BP particles remained constant at ≈ − 25 mV across the tested temperature range studied (0–35 °C), indicating no significant changes occurred in their EDL. Conversely, the PDEAM-BP particles showed a temperature-dependent zeta potential, changing from − 16 mV at 1 °C to − 44 mV at 25 °C, after which it plateaued at higher temperatures. We observe that the magnitude of the zeta potential of PDEAM-BP increases at elevated temperatures with an enhanced surface charge for thermoresponsive polymers in their collapsed state, which agrees with prior reports82,83. While deswelling is typically expected to lower the local dielectric constant, the concurrent increase in the density of ionizable groups near the surface appears to dominate, leading to the observed enhancement in the magnitude of the zeta potential. We propose that the temperature-dependent zeta potential of PDEAM is responsible for the invertible effective polarizability seen via both low-frequency (300 Hz) measurements of particle swimming and high-frequency (200 kHz) dielectrophoretic trapping behavior. At high temperatures (above the CPST), the larger magnitude of zeta potential for PDEAM could suggest that a locally higher concentration of ions near the surface contributes to a higher polarization than PpMS, while the opposite would be true at low temperatures. The crossover in zeta potential (at ≈ 15 °C) is close to the range of CPST (15–20 °C) and in good agreement with the crossover in DEP behavior between 5–30 °C. Notably, the specific crossover temperature may depend on the frequency of the applied field, so the values do not necessarily align perfectly.

A Zeta potential of PpMS-BP and PDEAM-BP particles at different temperature. Data points represent mean values, and error bars indicate mean ± SD (n = 3). Some error bars are smaller than the symbol size and not fully visible. B Linear speed of a bilayer shape-morphing particle, a monolayer non-shape-morphing PDEAM-BP particle, and a monolayer non-shape-morphing PpMS-BP particle under an electric field 400 V cm−1 at 300 Hz. Data points represent mean values, and error bars indicate mean ± SD (n = 5). Inset: Schematic representation of each particle describing the direction of propulsion. C–E Superimposed image (top) and particle image velocimetry (bottom) showing experimental fluid patterns around the shape-morphing bilayer particle under an electric field 400 V cm−1 at 300 Hz (C) > CPST (25°C), (D) \(\lesssim\) CPST (15 °C), and (E) « CPST (5 °C). Scale = 20 μm.
An additional effect that may contribute, given the use of a PDEAM hydrogel layer, is ion transport through the “bulk” of the particle, rather than simply motion of charges associated with the EDL. We sought to gain additional insight into this aspect by performing electrochemical impedance spectroscopy (EIS) on UV-crosslinked PDEAM films swollen to equilibrium on interdigitated electrodes (Supplementary Fig. 9). Fitting the impedance spectra to an equivalent circuit model yielded an ionic conductivity (presumably primarily of protons associated with acrylic acid groups in the PDEAM-BP copolymers) of (7.19 ± 0.03) × 10−8 S m−1 and a specific capacitance of (1.14 ± 0.002) × 10-4 F m−2. Together with a characteristic PDEAM layer thickness of ≈2 μm in the particles, these values correspond to an RC time constant of ~3 ms associated with field-driven migration of ions across the thickness of the PDEAM-BP film (Supplementary Table 1). The inverse of this time constant reveals a characteristic frequency of ~300 Hz. The proximity of this characteristic frequency and the frequency used in swimming experiments suggests that bulk ion transport may also play a role in the reported electrokinetic phenomena, although we expect these effects to be negligible at 200 kHz where DEP measurements were performed.
To isolate the role of particle shape, we examined the propulsion of: (1) shape-morphing bilayer particles, (2) non-shape-morphing crescent-shaped particles made from PDEAM-BP only, and (3) non-shape-morphing crescent-shaped particles made from PpMS-BP only (Fig. 4B). Under an AC electric field, bilayer particles exhibited active self-propulsion with an average linear speed of 12 μm s−1, moving perpendicular to the applied field as before (Fig. 1E). As discussed above, this motion was driven by asymmetric fluid flows generated between the PDEAM-BP and PpMS-BP layers (Fig. 3B). For the non-shape-morphing PDEAM-BP particles, the speed of propulsion was significantly slower and was primarily driven by the geometric and material asymmetry that likely promotes uneven surface polarization, driving weak but directional propulsion. In contrast, non-shape-morphing PpMS-BP particles exhibited nil motion, potentially due to the lack of polarization of their EDL. At 25 °C, the PDEAM-BP layer in bilayer particles is highly negatively charged, leading to a strongly polarized EDL compared to the PpMS-BP layer, whose zeta potential is smaller in magnitude. In the case of bilayer particles, the mismatch in polarization between the two materials generates ICEP flows that drive propulsion. By contrast, particles with asymmetric shape but homogeneous material properties (e.g., single-component PDEAM-BP) show little translation, with any residual motion likely arising from the relatively higher zeta potential of PDEAM and/or contributions from bulk ion transport. This comparison highlights that while geometric asymmetry alone is sufficient to generate propulsion, the material contrast is essential for the high swimming speeds observed. We note that rod-shaped bilayer particles did not exhibit measurable propulsion, which may be due to differences in orientation (e.g., PDEAM layer facing upward relative to the electrodes) that drive the symmetric fluid flows near the particle.
The temperature-dependent morphological transitions and associated changes in active motion of shape-morphing bilayer particles highlight the interplay between particle geometry, induced polarization, and field-driven dynamics. The application of an AC electric field to a polarizable surface suspended in fluid induces charge separation and generates localized fluid flows, a phenomenon known as induced-charge electro-osmosis (ICEO)53. For shape-morphing bilayer particles, the asymmetric ICEO flows around their surfaces provide the driving force for propulsion in AC electric fields. To visualize these flows, particles were immobilized at various temperatures within an experimental cell, and the induced fluid flows were visualized using isotropic polystyrene (PS) tracer spheres (diameter = 0.75 μm). Videos of tracer motion were recorded and analyzed to generate flow patterns by superimposing video frames. Additionally, particle image velocimetry (PIV) was applied to quantify the speeds of the tracer particles and study the flow dynamics across each layer of the immobilized particles.
The ICEO flow patterns at different temperatures and particle shapes are shown in Fig. 4C–E, Supplementary Movie 5. At 25 °C, corresponding to the boomerang-shaped particle, the fluid flow exhibited higher velocities near the PDEAM-BP layer compared to the PpMS-BP layer (Fig. 4C). This disparity arises from the higher polarizability of PDEAM-BP relative to PpMS-BP above the CPST, resulting in asymmetric flows primarily generated from the PDEAM-BP side. These flows drive linear propulsion of the particles perpendicular to the applied AC electric field. At 12 °C, the horseshoe-shaped particle exhibited more complex asymmetric flow patterns due to its reduced symmetry. Below the CPST of PDEAM-BP, the Re[CM] for PDEAM-BP falls below PpMs (Fig. 3H), indicating that the rigid layer is more polarizable than the swelling layer. This is consistent with the observation that tracer speeds are faster on the PpMS-BP layer (i.e., the left region of the immobilized particle) (Fig. 4D) as well as the oblique flows across both layers, resulting in nonlinear propulsion in solution. In contrast, at temperatures below 5 °C, the particles assumed a donut shape with an isotropic geometry (Fig. 4E). The ICEO flows around the particle were quasi-symmetric, lacking the necessary asymmetry to sustain directional motion. Consequently, no net propulsion was observed for the donut-shaped particles.
Temperature-modulated steering of shape-morphing particles
To show that particle trajectories can be encoded into the bilayers through programmed changes in shape and polarizability, we performed an experiment to illustrate in situ steering of particles at the single-particle level. Specifically, we wrote a program to drive a particle left or right, invert the direction of motion (i.e., right or left) by flipping84,85,86, and induce a final change to drive the particle up or down (Fig. 5A). We first observed a boomerang-shaped particle at 25 °C moving linearly in the positive longitudinal (x-direction) under the applied field. The field was then turned off, and the temperature was reduced to 17 °C to induce a shape change to a crescent. Utilizing the 3D helical motion of the particles at this temperature, we flipped the orientation of the particle using a 12 s exposure to the field. Subsequently, the temperature was increased back to 25 °C, causing the particle to resume linear motion in the negative longitudinal (x-direction). Last, the field was turned off again, and the temperature was reduced to 12 °C, resulting in a shape transition to a horseshoe configuration. At this temperature, the particle reoriented itself upon reapplying the field, and it moved linearly in the positive lateral (y-direction) back to its original position (Fig. 5B, C).

A Summary of the corresponding bending curvature, particle shape, and motion at different temperatures. Each program was used to steer the motion of bilayer particles in the x- or y-direction. B Fluorescent microscope image showing temperature-directed steering of bilayer particles. Induced helical motions allow a change in orientation of the bilayer particle upon turning off the field. C x and y-coordinates of a bilayer particle upon temperature change. All experiments were performed in an electric field strength of 460 V cm−1 at 300 Hz.
By controlling the orientation of individual particles during cluster formation, it may be possible to design and manipulate the trajectories of these assemblies with a higher degree of precision. Our findings demonstrate how temperature-dependent changes in particle shape and polarizability can be exploited to alter particle motion dynamically. Such control over particle trajectories holds promise for applications in soft robotics, targeted cargo delivery, and programmable active matter.
Discussion
In this work, we developed a process to fabricate shape-morphing microparticles by layering a rigid polymer with a hydrogel exhibiting a VPTT. Using an AC electric field, we explored the motion of these shape-morphing particles and established correlations between temperature, particle anisotropy, induced polarization, and trajectory. Our fabrication method employs spin-coating and planar lithography, enabling scalable production of various shapes. We created bilayer particles capable of morphing between rod-, boomerang-, crescent-, horseshoe-, and donut-shapes with temperature changes, driven by the swelling behavior of the hydrogel layer. The application of an AC field induced preferred orientations and diverse motions of the particles, including linear and nonlinear trajectories, depending on the shape, symmetry, and polarizability of the particles. Our results suggest that the deswelling-induced crossover in dielectrophoretic behavior of PDEAM-BP is driven largely by an increase in surface charge density, and therefore effective polarizability due to ion motion. Future studies should explore the frequency and temperature dependence of Re[CM] across various material compositions to further decouple the roles of dielectric permittivity and ionic conduction in particle actuation and propulsion.
Methods
Materials
N, N-diethylacrylamide (DEAM) and acrylic acid (AAc) were purchased from TCI America, and inhibitors were removed using basic alumina. 1,4-dioxane was purchased from Thermo Fisher Scientific. p-methylstyrene (pMS), azobisisobutyronitrile (AIBN), and poly(vinyl alcohol) (PVA, 13-23 kg mol-1, 87-89% hydrolyzed) were purchased from Sigma-Aldrich. Acrylamidobenzophenone (AAmBP) and 2-(methacryloyloxy) ethyl rhodamine B (RhBMA) were prepared according to a previously reported literature procedure87,88.
Synthesis of polymers
Polymers were synthesized by free-radical polymerization. Amounts of 2.80 g of DEAM, 450 mg of AAmBP, 130 mg of AAc, 17 mg of RhBMA, and 35 mg of AIBN were polymerized in 30 mL of 1,4-dioxane at 80 °C for 18 h under nitrogen, resulting in poly(DEAM-co-AAc-co-AAmBP-co-RhBMA) copolymer, shortly PDEAM-BP, containing 7 mol.% AAc, 7 mol.% AAmBP, and 0.1 mol.% RhBMA. The copolymer was purified by precipitation in hexane and dried overnight in a vacuum oven. Amounts of 2.65 g of pMS, 295 mg of AAmBP, and 15 mg of AIBN were polymerized in 30 mL of 1,4-dioxane at 80 °C for 15 h under nitrogen, yielding poly(pMS-co-AAmBP), shortly PpMS-BP, with 5 mol.% BP. The copolymer was purified by precipitation into stirring methanol and dried overnight in a vacuum oven.
Fabrication of shape-morphing bilayer particles
Bilayer structures of PpMS-BP and PDEAM-BP were prepared by sequential spin-coating, crosslinking, and developing the copolymer films. Prior to trilayer fabrication, a PVA film of 100 nm was coated on a silicon substrate as a sacrificial layer. The first layer was formed by spin-coating PDEAM-BP (120 mg mL−1 in 1-propanol) at 500 rpm for 50 s and dried on a 105 °C hotplate for 8 min. The second layer was formed by spin-coating PpMS-BP (15 mg mL−1 in toluene) at 2000 rpm for 50 s and dried on a 105 °C hotplate for 5 min. The thickness measured using a profilometer (XT Stylus Profilometer, Daktak) was 2 μm and 100 nm for the first and second layers, respectively. The film was patterned to 40 μm x 4 μm rectangles by maskless lithography (μMLA, Hidelberg Instruments) with a UV dose of 4000 mJ cm−2. Unexposed area was developed in 3:1 mixture of toluene and hexane, and the developer solution was mildly removed using an air gun. Finally, the substrate was immersed into MilIi-Q water to release the rectangular particles.
Electric field-driven propulsion setup
Coplanar propulsion chambers were prepared according to a previously reported literature procedure25,86 and thoroughly cleaned with acetone prior to each experiment. A hydrophobic barrier pen was used to draw a square outline, approximately 1.25 cm \(\times\) 1.25 cm, overlapping both electrodes. Two strips of PTFE tape were positioned flat and perpendicular to the electrodes at the edges of the hydrophobic boundary. A small volume (10–20 μL) of particle solution was then pipetted into the space between the PTFE tape spacers and the gold electrodes, followed by placing a coverslip over the spacers. The particles were allowed to settle for at least 5 min to reach an approximate mechanical equilibrium height in the chamber, after which the AC electric field was applied. Each time the temperature was changed, particles equilibrated for at least 5 min before the AC electric field turned on again. The entire setup was mounted on a Zeiss AxioVert A1 TL/RL inverted fluorescence microscope, equipped with a Zeiss Axiocam 305 mono camera and a Linkam PE100 temperature-controlled stage. For electrical input, a 33210 A waveform generator (Agilent) was connected to a 2340 high-voltage amplifier (Tegam), with the leads of the amplifier attached to Cu tape on the propulsion chamber. A 300 Hz square wave signal was applied to the propulsion chamber, forming an electric field with magnitudes of 340–540 V cm−1. Particle tracking was performed at the center of the electrode gap (2 mm wide region of interest), where the AC electric field is spatially uniform, to minimize field gradients and avoid dielectrophoretic contributions to propulsion84.
Microscopy and particle tracking
To characterize the lithographic patterns of block-shaped particles, the substrate was sputter-coated with a 20 nm layer of Pt and imaged using a SEM in secondary electron imaging mode at an accelerating voltage of 10 kV (Hitachi SU3500). The active motion of shape-morphing bilayer particles was captured using the built-in camera on the microscope. Particle coordinates during propulsion were extracted from the experimental videos using ImageJ software. Each video frame was processed into a binary image, and the particle’s position was determined using the “Centroid” function within the “Analyze Particles” tool21.
DEP experimental setup
DEP experiments were conducted in a trapping chamber fixed on a coplanar interdigitated electrode device with soldered electrical wires (Supplementary Fig. 7) connected to a function generator by electrode leads. The chamber comprised of a thin silicone rubber spacer (USA Sealing) with a hole in the center created by a biopsy punch to confine the liquid particle sample over the electrodes. The electrode device was washed thoroughly with acetone, and the spacer was washed with DI water prior to each experiment. The spacer was then placed firmly on the electrode device, and 10 µL of a particle sample was pipetted into the center and covered by a coverslip. The electrode device was then situated on the stage of a fluorescent microscope equipped with a camera. For experiments investigating PDEAM-BP above and below the VPTT, the device was first situated on a temperature-controlled stage, and the temperature was monitored throughout the experiments. Particles were left to settle for at least 5 min to allow them to reach an approximate mechanical equilibrium height in the chamber prior to application of the AC electric field.
EIS experimental setup
To characterize the dielectric and conductive properties of PDEAM-BP, a thin film of PDEAM-BP was deposited onto an interdigitated electrode (IDE) substrate via drop-casting. Droplets of PDEAM dissolved in toluene (120 mg mL−1) were deposited and dried four consecutive times on an IDE, yielding an uneven film of ≈ 25 μm thickness. The film was exposed to UV light to initiate crosslinking. To simulate the hydrated state of PDEAM bilayers during electromotive propulsion, the substrate was placed in a sealed plastic chamber containing a water reservoir and allowed to equilibrate for 48 h at 22 °C. EIS measurements were performed in a two-electrode configuration on an interdigitated electrode (Micrux ED-IDRA-Au chip) using a potentiostatic frequency sweep (frequency range: 1 Hz to 1 MHz) with an AC amplitude of 40 mV on a Gamry Potensiostat (Reference 600+). The resulting Nyquist plot was fit to a standard equivalent circuit model composed of a capacitor, representing the high-frequency dielectric polarization, in parallel with a resistor and constant phase element, representing the ion conductivity and interfacial polarization, respectively (Supplementary Fig. 9A).
Flow pattern near bilayer particles
The fluid flow field surrounding an immobilized bilayer shape-morphing particle was analyzed using polystyrene spheres as tracer particles. These isotropic tracers (diameter = 0.75 μm, Magsphere Inc.) did exhibit self-propulsion but instead moved with the surrounding fluid. The tracer particles were functionalized with negatively charged carboxylate groups (zeta potential = −38 mV at pH 7), washed three times with deionized water, and dispersed in water at a final concentration of 0.005 wt.%. For a typical experiment, the bilayer particles were immobilized in the experimental cell between the electrodes by drying the particle suspension. Following immobilization, 10 μL of the tracer dispersion was added to the cell. Passive motion of the tracer particles around the immobilized particles under an applied AC electric field was recorded using a brightfield microscope.
Particle image velocity (PIV) analysis
PIV analysis was conducted using PIVlab version 3.0289. Briefly, the videos taken for the tracer particle experiments were imported into the PIVlab graphical user interface in MATLAB. Firstly, videos were cropped in a 300 × 300 pixel region around the particle of interest. A mask was then manually drawn around the particles to exclude them from analysis. After, the videos were pre-processed in PIVlab using a contrast-limited adaptive histogram equalization (CLAHE) with a window size of 64 pixels, intensity capping, Wiener 2 denoising with a window size of 3 pixels, and were auto-contrasted. The videos were then analyzed with the FFT window deformation correlation algorithm, with a first pass interrogation area of 64 pixels with a step size of 32 pixels and a second pass interrogation area of 32 pixels with a step size of 16 pixels. The velocity data was averaged over all frames of the video, undefined values were interpolated with a bilinear interpolation scheme, and data was smoothed at full strength prior to visualization. Velocity data was converted from pixel frame−1 units to m s−1 using a frame rate of 1.35 frame s−1 and a distance calibration of 3.06 pixel µm−1. The x- and y-components of velocity are represented via a quiver plot, and the velocity magnitude is represented via a contour plot.
Data availability
The data that support the findings of this study are available in the Supplementary Information and Supplementary Movies of this article and are available from the corresponding author upon request.
References
Ojkic, N., Serbanescu, D. & Banerjee, S. Antibiotic resistance via bacterial cell shape-shifting. MBio 13, e00659–22 (2022).
Huang, K. C., Mukhopadhyay, R., Wen, B., Gitai, Z. & Wingreen, N. S. Cell shape and cell-wall organization in gram-negative bacteria. Proc. Natl Acad. Sci. Usa. 105, 19282–19287 (2008).
Banerjee, S. et al. Mechanical feedback promotes bacterial adaptation to antibiotics. Nat. Phys. 17, 403–409 (2021).
Pastrana, C. L., Qiu, L., Armon, S., Gerland, U. & Amir, A. Pressure-induced shape-shifting of helical bacteria. Soft Matter 19, 2224–2230 (2023).
Shiurba, R. et al. Cellular responses of the ciliate, Tetrahymena thermophila, to far infrared irradiation. Photochem. Photobiol. Sci. 5, 799–807 (2006).
Paxton, W. F. et al. Catalytic nanomotors: autonomous movement of striped nanorods. J. Am. Chem. Soc. 126, 13424–13431 (2004).
Shi, A. & Schwartz, D. K. Bridging macroscopic diffusion and microscopic cavity escape of brownian and active particles in irregular porous networks. ACS Nano 18, 22864–22873 (2024).
Lyu, X. et al. Active synthetic microrotors: design strategies and applications. ACS Nano 17, 11969–11993 (2023).
Tan, L., Yang, Y., Fang, L. & Cappelleri, D. J. Shape-programmable adaptive multi-material microswimmers for biomedical applications. Adv. Funct. Mater. 34, 2401876 (2024).
Bishop, K. J. M., Biswal, S. L. & Bharti, B. Active colloids as models, materials, and machines. Annu. Rev. Chem. Biomol. Eng. 14, 1–30 (2023).
Han, K., Shields, C. W. & Velev, O. D. Engineering of self-propelling microbots and microdevices powered by magnetic and electric fields. Adv. Funct. Mater. 28, 1705953 (2018).
Harraq, A. A., Choudhury, B. D. & Bharti, B. Field-induced assembly and propulsion of colloids. Langmuir 38, 3001–3016 (2022).
Ganguly, A. & Gupta, A. Going in circles: slender body analysis of a self-propelling bent rod. Phys. Rev. Fluids 8, 014103 (2023).
Shemi, O. & Solomon, M. J. Self-propulsion and active motion of Janus ellipsoids. J. Phys. Chem. B 122, 10247–10255 (2018).
Kemper, C. C. et al. Rapid discovery of sequence-encoded magnetically reconfigurable microrobots using Monte Carlo simulations. Adv. Intell. Syst. https://doi.org/10.1002/aisy.202500222 (2025).
Van Kesteren, S., Alvarez, L., Arrese-Igor, S., Alegria, A. & Isa, L. Self-propelling colloids with finite state dynamics. Proc. Natl Acad. Sci. USA 120, e2213481120 (2023).
Gauri, H. M., Patel, R., Lombardo, N. S., Bevan, M. A. & Bharti, B. Field-directed motion, cargo capture, and closed-loop controlled navigation of microellipsoids. Small 20, 2403007 (2024).
Gao, Y., Sprinkle, B., Springer, E., Marr, D. W. M. & Wu, N. Rolling of soft microbots with tunable traction. Sci. Adv. 9, eadg0919 (2023).
Raj, R. R., Ganguly, A., Becker, C., Shields, C. W. & Gupta, A. Motion of an active bent rod with an articulating hinge: exploring mechanical and chemical modes of swimming. Front. Phys. 11, 1307691 (2023).
Riedel, S., Hoffmann, L. A., Giomi, L. & Kraft, D. J. Designing highly efficient interlocking interactions in anisotropic active particles. Nat. Commun. 15, 5692 (2024).
Lee, J. G. et al. Bubble-based microrobots with rapid circular motions for epithelial pinning and drug delivery. Small https://doi.org/10.1002/smll.202300409 (2023).
De Ávila, B. E.-F. et al. Micromotor-enabled active drug delivery for in vivo treatment of stomach infection. Nat. Commun. 8, 272 (2017).
Kim, M., Nicholas, J. D., Puigmartí-Luis, J., Nelson, B. J. & Pané, S. Targeted drug delivery: from chemistry to robotics at small scales. Annu. Rev. Control Robot. https://doi.org/10.1146/annurev-control-022823-034402 (2024).
Lee, J. G., Raj, R. R., Day, N. B. & Shields, C. W. Microrobots for biomedicine: unsolved challenges and opportunities for translation. ACS Nano 17, 14196–14204 (2023).
Thome, C. P., Hoertdoerfer, W. S., Bendorf, J. R., Lee, J. G. & Shields, C. W. Electrokinetic active particles for motion-based biomolecule detection. Nano Lett. 23, 2379–2387 (2023).
Han, H. et al. Imaging-guided bioresorbable acoustic hydrogel microrobots. Sci. Robot. 9, eadp3593 (2024).
Patel, R., Brahana, P. J. & Bharti, B. Enhanced removal of anionic pollutants using active propulsion of patchy zif-8 microparticles in electric field. ACS Appl. Eng. Mater. 2, 2777–2789 (2024).
Huang, H. et al. Large-scale self-assembly of MOFs colloidosomes for bubble-propelled micromotors and stirring-free environmental remediation. Angew. Chem. Int. Ed. 61, e202211163 (2022).
Ju, X. et al. Technology roadmap of micro/nanorobots. ACS Nano 19, 24174–24334 (2025).
Zhang, Q., Weber, C., Schubert, U. S. & Hoogenboom, R. Thermoresponsive polymers with lower critical solution temperature: from fundamental aspects and measuring techniques to recommended turbidimetry conditions. Mater. Horiz. 4, 109–116 (2017).
Pilate, F., Toncheva, A., Dubois, P. & Raquez, J.-M. Shape-memory polymers for multiple applications in the materials world. Eur. Polym. J. 80, 268–294 (2016).
Kirillova, A. & Ionov, L. Shape-changing polymers for biomedical applications. J. Mater. Chem. B 7, 1597–1624 (2019).
Sydney Gladman, A., Matsumoto, E. A., Nuzzo, R. G., Mahadevan, L. & Lewis, J. A. Biomimetic 4D printing. Nat. Mater. 15, 413–418 (2016).
Bai, Y. et al. A dynamically reprogrammable surface with self-evolving shape morphing. Nature 609, 701–708 (2022).
Guimarães, C. F., Ahmed, R., Marques, A. P., Reis, R. L. & Demirci, U. Engineering hydrogel-based biomedical photonics: design, fabrication, and applications. Adv. Mater. 33, 2006582 (2021).
Shim, T. S. et al. Shape changing thin films powered by DNA hybridization. Nat. Nanotechnol. 12, 41–47 (2017).
Armon, S., Efrati, E., Kupferman, R. & Sharon, E. Geometry and mechanics in the opening of chiral seed pods. Science 333, 1726–1730 (2011).
Jo, Y. K. et al. Stretch-responsive adhesive microcapsules for strain-regulated antibiotic release from fabric wound dressings. Biomater. Sci. 9, 5136–5143 (2021).
Raj, R. R. et al. Transport of adoptive cell transfers with magnetic helical microrobots. Small e05946 https://doi.org/10.1002/smll.202505946 (2025).
Xia, Y., He, Y., Zhang, F., Liu, Y. & Leng, J. A review of shape memory polymers and composites: mechanisms, materials, and applications. Adv. Mater. 33, 2000713 (2021).
Gao, H., Li, J., Zhang, F., Liu, Y. & Leng, J. The research status and challenges of shape memory polymer-based flexible electronics. Mater. Horiz. 6, 931–944 (2019).
Tang, P. et al. Intrinsically stretchable and shape memory conducting nanofiber for programmable flexible electronic films. ACS Appl. Mater. Interfaces 11, 48202–48211 (2019).
Kim, Y. S. et al. Thermoresponsive actuation enabled by permittivity switching in an electrostatically anisotropic hydrogel. Nat. Mater. 14, 1002–1007 (2015).
Booth, R. E. et al. Electrothermally actuated semitransparent shape memory polymer composite with application as a wearable touch sensor. ACS Appl. Mater. Interfaces 14, 53129–53138 (2022).
Wang, W. et al. Fully polymeric conductive hydrogels with low hysteresis and high toughness as multi-responsive and self-powered wearable sensors. Adv. Funct. Mater. 34, 2316346 (2024).
Sakorikar, T. et al. A guide to printed stretchable conductors. Chem. Rev. 124, 860–888 (2024).
Feng, W., He, Q. & Zhang, L. Embedded physical intelligence in liquid crystalline polymer actuators and robots. Adv. Mater. 37, 2312313 (2025).
Zhang, M. et al. Robust hydrogel actuators functioning in multi-environments enabled by thermo-responsive polymer nanoparticle coatings on hydrogel surfaces. Small 20, 2400534 (2024).
Yan, X., Chen, Q., Huo, Z., Zhang, N. & Ma, M. Programmable multistimuli-responsive and multimodal polymer actuator based on a designed energy transduction network. ACS Appl. Mater. Interfaces 14, 13768–13777 (2022).
Wang, H. et al. Soft micromotors with switchable motion enabled by 3D-to-3D shape reconfiguration. Chem. Mater. 36, 4174–4184 (2024).
Diwakar, N. M., Kunti, G., Miloh, T., Yossifon, G. & Velev, O. D. AC electrohydrodynamic propulsion and rotation of active particles of engineered shape and asymmetry. Curr. Opin. Colloid Interface Sci. 59, 101586 (2022).
Yan, J. et al. Reconfiguring active particles by electrostatic imbalance. Nat. Mater. 15, 1095–1099 (2016).
Peng, C., Lazo, I., Shiyanovskii, S. V. & Lavrentovich, O. D. Induced-charge electro-osmosis around metal and Janus spheres in water: patterns of flow and breaking symmetries. Phys. Rev. E 90, 051002 (2014).
Singh, J. P., Lele, P. P., Nettesheim, F., Wagner, N. J. & Furst, E. M. One- and two-dimensional assembly of colloidal ellipsoids in ac electric fields. Phys. Rev. E 79, 050401 (2009).
Lee, J. G., Al Harraq, A., Bishop, K. J. M. & Bharti, B. Fabrication and electric field-driven active propulsion of patchy microellipsoids. J. Phys. Chem. B 125, 4232–4240 (2021).
Lauga, E. Life around the scallop theorem. Soft Matter 7, 3060–3065 (2011).
Han, K., Shields, C. W., Bharti, B., Arratia, P. E. & Velev, O. D. Active reversible swimming of magnetically assembled “Microscallops” in non-newtonian fluids. Langmuir 36, 7148–7154 (2020).
Diwakar, N. M., Yossifon, G., Miloh, T. & Velev, O. D. Active microparticle propulsion pervasively powered by asymmetric AC field electrophoresis. J. Colloid Interface Sci. 676, 817–825 (2024).
Han, K. Electric and magnetic field-driven dynamic structuring for smart functional devices. Micromachines 14, 661 (2023).
Wang, Z. et al. Active patchy colloids with shape-tunable dynamics. J. Am. Chem. Soc. 141, 14853–14863 (2019).
Katzmeier, F. & Simmel, F. C. Microrobots powered by concentration polarization electrophoresis (CPEP). Nat. Commun. 14, 6247 (2023).
Han, K. & Snezhko, A. Field-driven out-of-equilibrium collective patterns for swarm micro-robotics. ACS Nano 19, 16248–16266 (2025).
Wen, X. et al. Multi-mode geometrically gated encryption with 4D morphing hydrogel. Nat. Commun. 16, 2830 (2025).
Kreienbrink, K. M., Cruse, Z. A., Kumari, A. & Shields, C. W. Precise surface patches on active particles of arbitrary shape through microstenciling. Nat. Commun. 16, 6062 (2025).
Gangwal, S., Cayre, O. J., Bazant, M. Z. & Velev, O. D. Induced-charge electrophoresis of metallodielectric particles. Phys. Rev. Lett. 100, 058302 (2008).
Pawar, A. B. & Kretzschmar, I. Patchy particles by glancing angle deposition. Langmuir 24, 355–358 (2008).
Pawar, A. B. & Kretzschmar, I. Fabrication, assembly, and application of patchy particles. Macromol. Rapid Commun. 31, 150–168 (2010).
Jeon, S.-J., Hauser, A. W. & Hayward, R. C. Shape-morphing materials from stimuli-responsive hydrogel hybrids. Acc. Chem. Res. 50, 161–169 (2017).
Yamauchi, H. & Maeda, Y. LCST and UCST behavior of poly(N -isopropylacrylamide) in DMSO/water mixed solvents studied by IR and micro-raman spectroscopy. J. Phys. Chem. B 111, 12964–12968 (2007).
Feil, H., Bae, Y. H., Feijen, J. & Kim, S. W. Effect of comonomer hydrophilicity and ionization on the lower critical solution temperature of N-isopropylacrylamide copolymers. Macromolecules 26, 2496–2500 (1993).
Ma, F., Yang, X., Zhao, H. & Wu, N. Inducing propulsion of colloidal dimers by breaking the symmetry in electrohydrodynamic flow. Phys. Rev. Lett. 115, 208302 (2015).
Behdani, B., Lumpkins, J. & Silvera Batista, C. A. Impact of the electric polarizability on the transport and collective dynamics of metallodielectric janus particles. Langmuir 39, 9025–9034 (2023).
Zhu, X. et al. Synthesis and propulsion of magnetic dimers under orthogonally applied electric and magnetic fields. Langmuir 37, 9151–9161 (2021).
Zhu, X. & Wu, N. The formation and transformation of colloidal clusters under alternating-current electric fields. Langmuir 41, 15354–15363 (2025).
Zhu, X., Zhang, Y., Hanson, B. L., Wu, D. T. & Wu, N. Reconfigurable homochiral colloidal clusters assembled under orthogonally applied electric and magnetic fields. Proc. Natl Acad. Sci. Usa. 122, e2418006122 (2025).
Chen, Q. & Yuan, Y. J. A review of polystyrene bead manipulation by dielectrophoresis. RSC Adv. 9, 4963–4981 (2019).
Duarte, A. R. et al. Dielectrophoretic polarizability of surface-modified particles for studying induced-charge electroosmotic flows. Adv. Funct. Mater. 35, 2424557 (2025).
Juárez, J. J., Cui, J.-Q., Liu, B. G. & Bevan, M. A. kT-scale colloidal interactions in high frequency inhomogeneous AC electric fields. I. single particles. Langmuir 27, 9211–9218 (2011).
Juárez, J. J. & Bevan, M. A. Interactions and microstructures in electric field-mediated colloidal assembly. J. Chem. Phys. 131, 134704 (2009).
Morgan, H. & Green, N. G. AC Electrokinetics: Colloids and Nanoparticles. (Research Studies Press, Baldock, 2003).
Audus, D. J., Hassan, A. M., Garboczi, E. J. & Douglas, J. F. Interplay of particle shape and suspension properties: a study of cube-like particles. Soft Matter 11, 3360–3366 (2015).
Lencina, M. M. S. et al. Effect of surfactant concentration on the responsiveness of a thermoresponsive copolymer/surfactant mixture with potential application on “Smart” foam formulations. J. Colloid Interface Sci. 512, 455–465 (2018).
Ahiabu, A. & Serpe, M. J. Rapidly responding pH- and temperature-responsive poly (N -Isopropylacrylamide)-based microgels and assemblies. ACS Omega 2, 1769–1777 (2017).
Lee, J. G., Brooks, A. M., Shelton, W. A., Bishop, K. J. M. & Bharti, B. Directed propulsion of spherical particles along three-dimensional helical trajectories. Nat. Commun. 10, 2575 (2019).
Al Harraq, A. et al. Non-reciprocity, metastability, and dynamic reconfiguration in co-assembly of active and passive particles. Adv. Sci. https://doi.org/10.1002/advs.202409489 (2024).
Lee, J. G. et al. Magnetically locked Janus particle clusters with orientation-dependent motion in AC electric fields. Nanoscale 15, 16268–16276 (2023).
Jia, J., Sarker, M., Steinmetz, M. G., Shukla, R. & Rathore, R. Photochemical elimination of leaving groups from zwitterionic intermediates generated via electrocyclic ring closure of α,β-unsaturated anilides. J. Org. Chem. 73, 8867–8879 (2008).
Lin, W. et al. Biocompatible long-circulating star carboxybetaine polymers. J. Mater. Chem. B 3, 440–448 (2015).
Thielicke, W. & Sonntag, R. Particle image velocimetry for MATLAB: accuracy and enhanced algorithms in PIVlab. J. Open Res. Softw. 9, 12 (2021).
Acknowledgments
The authors thank Ritu R. Raj (CU Boulder) for PIV analysis, Dr. Xingrui Zhu (CU Boulder) and Alexander Favela (CU Boulder) for assistance with particle fabrication, Prof. Theodore W. Randolph (CU Boulder) for use of Litesizer 500 (Anton Paar) for zeta potential measurements, Prof. Laurel Hind (CU Boulder) for use of the plasma etcher, and Prof. Bhuvnesh Bharti (LSU) for useful discussions. This work was supported by the National Science Foundation (NSF) through a CAREER grant (CBET 2143419), CBET 2441639, and the Brandeis MRSEC (DMR-2011846). EIS measurements were supported by grant DE-SC0023264 from the Department of Energy, Basic Energy Sciences. C.W.S. is a Pew Scholar in the Biomedical Sciences, supported by the Pew Charitable Trusts. C.W.S. thanks the Packard Foundation for its support of this project. S.J.J. acknowledges support from a National Research Foundation (NRF) of Korea grant funded by the Korean government (MSIT) (2022R1A2C1007642). M.B.M. acknowledges support from the National Defense Science and Engineering (NDSEG) Fellowship Program. Publication of this article was supported by the University of Colorado Boulder Libraries Open Access Fund.
Author information
Authors and Affiliations
Contributions
R.C.H. and C.W.S. conceived and supervised the project. J.G.L. led the project with equal contribution from S.J.J. J.G.L., S.J.J., A.R.D., M.T. and M.B.M. performed the experiments and analyzed the data. All authors participated in writing the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks the anonymous reviewers for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Lee, J.G., Jeon, SJ., Duarte, A.R. et al. Shape-morphing active particles with invertible effective polarizability for configurable locomotion and steering. Nat Commun 17, 51 (2026). https://doi.org/10.1038/s41467-025-65482-9
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41467-025-65482-9
