
Abstract
Neuromorphic photonics enables brain-inspired information processing with higher bandwidth and lower energy consumption than traditional electronics, addressing the growing computational demands of the Internet of Things, cloud services, and edge computing. However, even current state-of-the-art electronic and photonic platforms are incapable of delivering the scalable throughput, multitasking processing, and energy efficiency required by these applications. Here, we demonstrate a tunable photonic reservoir computing device based on a nonlinear amplifying loop mirror (NALM), leveraging a time-delayed, single-unit, all-optical architecture. By combining dense temporal encoding with wavelength-division multiplexing, the system supports concurrent multitasking across independent data channels, enabling scalable computational performance without additional hardware complexity. Experiments and theoretical validation on classification and prediction benchmarks demonstrate the device’s performance, achieving a throughput of 20 tera-operations-per-second and an energy efficiency of 4.4 fJ per operation. These results highlight a promising path towards reconfigurable, compact, and high-performance photonic processors for real-time intelligent applications.
Similar content being viewed by others

Introduction
The rapid evolution of artificial intelligence (AI) and machine learning (ML) has revolutionized data processing, driving demand for computational platforms that are capable of handling vast amounts of data with high processing speed and minimal latency1,2. Neuromorphic photonics presents a promising solution to these challenges2,3,4,5,6,7,8 as it leverages optical systems to emulate neural networks, thus providing higher bandwidth, faster speeds, lower energy consumption, and smaller footprints compared to traditional electronic processors7,9,10,11. This solution can also lower carbon emissions, especially when training on large datasets. However, existing photonic architectures have critical limitations in computational throughput, energy efficiency, and latency, thus hindering their ability to meet the growing computational needs of AI, deep learning12, and other real-time-based applications13,14. Neuromorphic computing frameworks, such as extreme learning machines15, wave-based neural networks16, and reservoir computing (RC)17,18, have emerged as compelling approaches for the efficient implementation of photonic processing devices for ML.
Optical RC systems exploit physical dynamics to process input data, thus reducing training time and complexity while improving computational efficiency. To date, single-node optical RC architectures have been demonstrated using active components (such as semiconductor lasers19, amplifiers20,21, and electro-optic modulators22,23), as well as passive components24 (including saturable absorbers25,26 and photodiodes27). Despite significant progress, current RC implementations remain limited by their inherent architecture, in which nodes are created and interconnected through feedback mechanisms27,28. These mechanisms simplify the design by generating virtual nodes, but also introduce latency and limit processing speed, which is defined as system throughput (i.e., the total number of operations per second across all input data streams within a single reservoir unit). Recent efforts to increase computational throughput in RC have focused on faster electro-optical modulation and advanced data encoding schemes, such as pulse-amplitude modulation29,30,31 (PAM), often paired with wavelength-division multiplexing (WDM). However, these methods frequently rely on sequential sweeping across WDM channels32,33,34, or time-interleaving techniques35,36,37,38,39, which both introduce throughput latency and prevent the concurrent execution of independent tasks. Additional attempts at further scaling up performance have involved adding components or increasing the number and dimensionality of computational layers and readout components5,39. Typically, these result in decreased energy efficiency and processing speeds. Furthermore, existing WDM-based RC architectures21,38,39 also have limited tunability, when design constraints inherently fix both the reservoir memory and the activation function. At the same time, nonlinearity is introduced electronically at the input/output stage, resulting in optical-to-electrical-to-optical (OEO) latency and thus limiting the richness of reservoir dynamics. Such constraints significantly reduce system flexibility and adaptability for diverse ML tasks. Additionally, architectures employing spectral mixing approaches21 encounter nonlinear crosstalk40, which, in turn, limits the number of independently encoded channels and consequently degrades system accuracy and scalability.
To address these challenges, we demonstrate an RC device based on a nonlinear amplifying loop mirror (NALM) architecture. We leverage the NALM configuration for its proven ability to generate highly stable and nonlinear dynamics41,42,43,44, which are essential for optical reservoir computing. These dynamics enhance the reservoir’s computational capacity by enabling complex input mapping into a high-dimensional state space, thereby improving sensitivity to extremely small signal variations45,46. The intrinsic stability of the NALM ensures consistent classification performance, even under noisy or fluctuating input conditions.
Our device features an integrated nonlinear spiral waveguide (SW) and a semiconductor optical amplifier (SOA), both of which modulate the NALM overall nonlinear transfer function (i.e., the reservoir activation function). In contrast to previous RC implementations that rely on SOAs operating in saturation, whether in unidirectional configurations47,48,49 or through cross-gain modulation50,51, we set the SOA below saturation for all our experiments. Saturated SOAs exhibit plateaued gain, limiting the dynamic range and tunability of the nonlinear response. The unsaturated regime, on the other hand, allows for precise tunability of the gain and, therefore, of the reservoir activation function. Furthermore, by adjusting the intensity of the propagating field using a variable optical attenuator (VOA), we achieve additional control over the reservoir’s fading memory response, significantly enhancing both versatility and stability for diverse computational tasks.
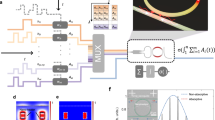
In line with the standard single-node reservoir computing framework, we establish virtual nodes within the reservoir via time-multiplexing, with training restricted to the readout layer. However, by employing multiple synchronized continuous-wave (CW) laser sources, our device can support multi-task processing across wavelength channels. This enables true concurrency for parallel data injection, both for the same or different machine learning tasks. The latter significantly reduces hardware complexity and addresses scalability and performance bottlenecks in earlier architectures. As a result, we have achieved a throughput of up to 20 tera-operations per second (TOPS), consuming only a few femtojoules per operation, while maintaining high accuracy in both classification and regression tasks. The device setup, as depicted in Fig. 1, encompasses a figure-eight fiber cavity that enables efficient multi-processing and provides rich system tunability. Such figure-eight fiber shapes can produce a range of coherent nonlinear dynamics, both with41 and without42,43 CW injection. By leveraging dynamic regimes and higher dimensionality enabled by virtual nodes, we accurately separate and classify continuous-valued input signals, even when they are complex and highly nonlinear.

The setup configuration is based on a figure-eight design, encompassing an input (top) and a processing (bottom) loop. The input loop comprises a 50:50 input optical coupler, a 90:10 output optical coupler, and a variable optical attenuator (VOA), which enables control over the intensity of the input field (I). The processing loop involves an integrated, highly doped silicon glass spiral waveguide (SW), a polarization controller (PC) that adjusts the transmission power of one of the TE or TM components, a 200 GHz bandpass filter (BPF), and a semiconductor optical amplifier (SOA). The 200 GHz filter is embedded in the loop to improve stability against the amplifier noise. The two loops are connected through a 50:50 4-port coupler, where the initial field (II) splits into two components, (III) and (IV), propagating in opposite directions. They recombine after amplification and nonlinear interaction in the same coupler. The output field (V) is demultiplexed and read out using an optical spectrum analyzer (for spectral profiles) and an ultrafast oscilloscope (for temporal profiles).
Results
We benchmarked our device to solve linearly inseparable problems using the m-bit delayed parity task, also known as the generalized exclusive OR (XOR)16. This nonlinear task performs the XOR operation between the current bit and the m prior bits stored in the reservoir memory and classifies the resulting sequences into two distinct classes. We injected a pseudorandom binary sequence (PRBS) of 4000 bits into a single-wavelength channel using a CW source (see the setup in Fig. 1) in the input device loop. Through the encoding procedure described in the Methods section entitled “Device architecture”, we generated 161 virtual processing nodes. Consistent with the RC paradigm, training was applied exclusively to the output weights, while the internal node connection weights remained fixed. These internal weights are inherently defined by the device configuration and the specific components that were employed, such as the SOA, the integrated SW, and the variable optical attenuator (VOA) (see Supplementary Note 1). We applied ridge regression27 to determine the optimal output weights required to reconstruct the target signal. The accuracy of the trained model was evaluated using standard performance metrics, such as the normalized root-mean-square error (NRMSE).
We investigated the classification performance when varying the SOA gain and the signal attenuation of the VOA by tuning their driving voltages, \({V}_{{\mathrm{SOA}}}\) and \({V}_{{\mathrm{VOA}}}\), respectively (which correspond to a specific level of amplification gain \(g\) and attenuation level \({A}_{{\mathrm{VOA}}}\)). Figure 2 shows the NRMSE maps (\(g\) and \({A}_{{\mathrm{VOA}}}\)) for 2-bit, 3-bit, and 4-bit delayed sequences in (a), (b), and (c), respectively. For the 2-bit XOR, we achieved 100% classification accuracy for the validation dataset, as shown in the dark-blue shaded region of Fig. 2a, which is defined by \(g < 8.3{{\rm{dB}}}\) and \({A}_{{\mathrm{VOA}}} < 4.9 \, {{\mathrm{dB}}} \left({V}_{{\mathrm{SOA}}} \right. < 0.8 \, {{\mbox{V}}}\) and \({V}_{{{\rm{VOA}}}} > 3{{\rm{V}}}\)). These values delimit operational regimes characterized by reduced nonlinear contributions from the SOA and by short fading memory controlled by the VOA.

a–c Parameter maps as functions of the SOA gain \((g)\) and VOA transmission \(({{{\rm{A}}}}_{{{\rm{VOA}}}})\), showing the calculated NRMSE after offline training for the 2-, 3-, and 4-bit delayed XOR tasks. The attenuation of the input signals is achieved by increasing the VOA voltage, allowing control of their attenuation. The nonlinear reservoir response is modulated by the SOA gain via the driving voltage \({V}_{{{\rm{SOA}}}}\). Below each map (d–f), the corresponding confusion diagrams provide a visual representation of the processing performance. The parameters considered for the diagrams are \(g=[6.1{\mbox{dB}},7.8{\mathrm{dB}},9.9{\mbox{dB}}]({V}_{{\mathrm{SOA}}}=[0.5{\mbox{V}},0.7{\mbox{V}},1.3{\mbox{V}}])\) and \({A}_{{\mathrm{VOA}}}=[0.8{\mbox{dB}},3.1{\mathrm{dB}},2.1{\mbox{dB}}]\) \(({V}_{{{\rm{VOA}}}}=[2{\mbox{V}},2.7{\mbox{V}},2.5{\mbox{V}}])\) for n = 2, 3, 4, respectively.
For the 3- and 4-bit XOR sequences, a further nonlinear contribution to the overall response (i.e., the activation function) of the reservoir is required to enhance the output separability and reduce the NRMSE16. This is achieved when setting \(g > 6.1{{\rm{dB}}}\) and \({A}_{{\mathrm{VOA}}} > 0.3{\mathrm{dB}}\) (\({V}_{{{\rm{SOA}}}} > 0.5{{\rm{V}}}\) and \({V}_{{\mathrm{VOA}}} > 1.5{{\rm{V}}}\)), respectively, for the 3- and 4-bit cases. This enables the device to achieve accuracies of 97% and 80% (with NRMSEs of 3% and 20%), as reported in Fig. 2b and c.
Reservoir tunability enables handling ML tasks with varying degrees of data separability and temporal correlations, as evident in the analysis of the effect on the propagating input signals as a function of the two tunable parameters. When an input signal, such as an optical field, enters the device reservoir loop through the 3 dB (50:50) input beamsplitter (Fig. 1), it separates into propagating and counter-propagating field components. Their phase difference, after they propagate in opposite directions and recombine at the beamsplitter, is affected by sequences of amplification and nonlinear interactions mediated by the intensity-dependent Kerr nonlinearity in the integrated SW52,53. During such an interaction, an increase in the amplification gain causes the SOA to contribute additional nonlinear responses, thereby enhancing classification performance when further nonlinear contributions are required54, without altering the physical reservoir topology. This unsaturated operational regime enables us to implement a controllable mechanism mediated by tunable parameters, allowing for the exploitation of nonlinearities arising from controlled optical feedback and intensity-dependent interference within the NALM. This approach allows for precise and reconfigurable reservoir functionality. In contrast to the cross-gain saturation-based nonlinearities demonstrated in earlier works50,51. Our architecture provides greater flexibility and control over reservoir dynamics. Generally, in time-delayed RC, a higher reservoir nonlinearity can impair the fading memory, which is determined by the system’s round-trip time46,55. By fine-tuning the input intensity attenuation through \({V}_{{\mathrm{VOA}}}\), we can modify the strength of the interconnection among the reservoir virtual nodes. This adjustment regulates the amount of circulating intra-cavity power per round-trip, thereby compensating for the reservoir’s diminished capacity to store bits within its fading memory56.
Multi-processing and parallel operation
We established the multi-processing capabilities of our device by carrying out two well-known ML benchmarks in parallel: the Mackey-Glass (MG) and the 10th-order Nonlinear Auto Regressive Moving Average (NARMA10) time series prediction tasks. These two tasks address the nonlinearity and memory of the reservoir, challenging the trade-off that occurs between them. The chaotic nature of the MG system, with high sensitivity to initial conditions, requires a reservoir with high nonlinearity. On the other hand, NARMA10 requires a reservoir with a long fading memory to efficiently retain temporal dependencies among data points across various round-trips. Therefore, by performing both tasks simultaneously, we demonstrate the universal multi-processing potential of our device in tackling both of these diverse ML tasks.
We use two wavelength channels, one at 1549.2 nm for the MG task and the second at 1549.4 nm for NARMA10. Crosstalk effects were reduced by applying a 0.2 nm spectral separation between the channels. We generated 1200 data points for each time series and encoded them onto \({{{\rm{N}}}}_{{{\rm{v}}}}=161\) virtual nodes in the reservoir through dense WDM. Based on the results of the m-bit XOR task (where the highest accuracies are achieved within the dark-blue-shaded region shown in Fig. 2a), we found that the best performance can be reached with \(g=10.3{{\rm{dB}}}\) (\({V}_{{{\rm{SOA}}}}=1.5{{\rm{V}}}\)) and \({A}_{{\mathrm{VOA}}}\approx 0\,{\mathrm{dB}}\) (\({V}_{{{\rm{VOA}}}}=0.5{{\rm{V}}}\)). We applied offline training and cross-validation57 independently on the two de-multiplexed outputs to obtain the weights that minimize the NRMSE between the targeted and predicted outputs. The results in Fig. 3 show misclassification rates of just 6% for MG and 1% for NARMA10, indicating high classification accuracy in both cases.

The figure reports the overlap between the targeted time series (green line) and the predicted output (purple diamonds) for the a MG and b NARMA10 tasks, which were performed in parallel. For each time series, the training results are presented for 300 points used as the validation dataset. We report the highest accuracies achieved with \(g=10.3{{\rm{dB}}}\) (\({V}_{{{\rm{SOA}}}}=1.5\) V) and \({{{\rm{A}}}}_{{{\rm{VOA}}}}\approx 0\) dB (\({V}_{{{\rm{VOA}}}}=0.5{{\rm{V}}}\)) with a 6% NRMSE for the MG task and 1% NRMSE for the NARMA10 task, indicating high classification accuracy for both.
Computational scalability of the device
We demonstrate system scalability through both increased bit density and parallel channel encoding, enabling the scaling up of computational throughput without requiring additional physical nodes. We next applied the device to solve a real-world task: recovering a nonlinearly perturbed telecom signal. Signal distortion, attenuation, dispersion, noise, and crosstalk originating from fiber propagation can all degrade or disrupt communications. Therefore, channel recovery techniques are essential for preserving signal integrity, minimizing downtime, and ensuring quality of service in networks29,58. This requires nonlinear, low-latency, high-speed processing capabilities. As shown by previous benchmarks, our device offers features that can meet these requirements, and its computational speed can be further enhanced by employing a dense information encoding scheme alongside multi-channel processing. The dense encoding scheme (see the Methods section entitled “Information encoding and readout”) enables us to inject multiple bits per wavelength channel into the reservoir, thereby increasing speed without adding extra computational units.
We generated a PRBS of 5 × (2¹⁵ − 1) bits and electro-optically encoded it onto a CW carrier signal. We then let the signal propagate through 60 km of standard single-mode fiber (SMF). Here, the once pristine signal experiences dispersion and nonlinear distortion, including cross-phase modulation and four-wave mixing, both of which are influenced by fiber length and signal intensity. Figure 4a and b show the time traces of the modulated field intensity using PAM30,31 before and after propagation, respectively, along with their corresponding eye diagrams. The distorted signal is then distributed and encoded across five independent channels, spaced at 0.2 nm intervals around 1550 nm (as shown in Fig. 4b), which we process concurrently via dense WDM. The number of encoding channels is limited only by the available CW sources and electro-optical intensity modulators (IMs). The representative bit sequences before and after recovery are shown in the Supplementary Fig. 5.

a A portion of the pristine temporal trace (i.e., the original telecom signal) is encoded into the CW wavelength channel. b The same portion of the distorted time trace after propagation. The eye diagram in the inset of (a) shows a large opening, indicating a high-quality signal with good integrity, low timing jitter, and high noise margin, demonstrating that the system is capable of reliable data transmission with an initial low BER. Conversely, the eye diagram inset in (b), with a filled triangular shape, suggests that the system is experiencing signal degradation, resulting in a decreased BER.
We trained and validated the output weights for each channel across four virtual nodes using the encoding technique and offline ridge regression. The bit error rate (BER, the metric that quantifies the percentage of misclassified bits in the recovered sequence) is shown in Fig. 5 (a), illustrating the individual channels and different input power levels (Pin = 2.6 dBm, 3.8 dBm, 4.2 dBm, 4.6 dBm, 5.0 dBm, and 5.4 dBm), which are commonly used in telecommunications. We observed that the BER decreases as the input signal power increases, due to improved signal-to-noise ratio.

a BER of all five channels (which are indicated by five different markers) after processing and ML-assisted reconstruction. The black dots denote the simulated values, which are compared with the average BER across the five parallel wavelength channels. A good agreement between the simulation and experimental results validates our theoretical model. b BER values of the distorted signal before (purple markers) and after (green markers) recovery with our device. c Experimentally measured distorted optical signal (green trace) after nonlinear propagation through 60 km of standard single-mode fiber at 5.2 dBm input power. The inset highlights a zoomed portion of the original bit sequence, which was encoded in the modulated signal amplitude transmitted over the fiber. d A portion of the recovered bit sequence obtained after processing the distorted input shown in (c) using our trained device. The plot compares the recovered and original bit sequences, with red squares indicating the positions of bit errors. These results support the BER performance reported in (a, b) and demonstrate the device’s ability to reconstruct transmitted digital information from severely degraded optical signals.
This change occurs regardless of the surge in distortion due to the intensity-dependent Kerr effect on transmission, which our approach can compensate for. The lowest BER value is 2 × 10−4 at 5.4 dBm of input power, representing a 145-fold improvement compared to the preprocessed distorted signal (see Fig. 5b). The inset of Fig. 5c displays a segment of the original bit sequence alongside the corresponding distorted optical signal, measured after propagation through the 60 km fiber link (prior to recovery processing). Figure 5d shows the recovered bit sequence at an input power of 5.4 dBm, with a zoomed-in segment highlighting the bit errors (marked with red squares).
The experimental results were validated using the model derived from the generalized nonlinear Schrodinger equation59 (GNLSE) (see Supplementary Note 1). We report the average BER over the five wavelength channels (red line) and the simulated BER values (black dots) in Fig. 5a. We observed excellent agreement between the numerical predictions and our experimental results, confirming the accuracy of our model.
We can quantify the throughput of our device in terms of MAC (multiply-and-accumulate) operations per second for parallel signal recovery. The device achieves a 2.7 Tera-MAC s-1. From the MAC calculation, we estimate a speed of 20 Tera-operations per second (TOPS) for our device. In terms of energy efficiency, the overall power consumption of the processing unit is approximately 87 mW, leading to consumption of ~ 4.4 fJ OP-1 (see Supplementary Note 4 for detailed calculations), which outperforms both state-of-the-art fiber-based optical neural networks and photonic chips5,8,35,60,61,62. See Table 1 for a numerical comparison.
Discussion
In this work, we developed a tunable neuromorphic computing device based on an NALM configuration, thereby realizing a time-delayed RC circuit. This device was applied to the high-speed, low-latency processing of nonlinear, complex ML tasks, including classification for forecasting and regression for telecom signal recovery.
This device achieves high classification accuracy in the m-bit delayed-XOR task by optimizing reservoir parameters. It also demonstrates effective handling of parallel machine learning tasks (i.e., multitasking), as shown by its performance on the MG and NARMA10 time series, with a minimum prediction accuracy of more than 94%.
The reservoir’s throughput is directly linked to its fundamental clock frequency, which is defined as the inverse of the round-trip time63,64. In our system, this corresponds to 13.3 MHz (75 ns round-trip), which sets the device’s intrinsic throughput and, therefore, its inherent throughput. However, because the architecture supports the simultaneous processing of multiple wavelength channels, the system can scale its throughput without requiring additional physical components. Using Eq. (17) reported in the Supplementary Note 4.1, we calculated the device throughput for telecom signal recovery, obtaining a value of 20 TOPS and a minimum BER of 2 × 10⁻⁴ for the recovered signal.
Advanced digital signal processing (DSP) methods, including digital backpropagation64, typically report BER values around 2 × 10⁻². Real-time field-programmable gate array-based coherent receivers have achieved 2.4 × 10⁻⁴ at 15 Gbaud with 16-quadrature amplitude modulation (16-QAM)65. These approaches require thousands of multipliers and significantly higher power consumption64,66, typically around 3 pJ per bit per channel67,68, with latency between 100 ns and 1 μs, depending on the system clock69. In contrast, optical signal processing methods offer a latency of 20 to 200 ps and energy consumption ranging from 0.1 to 1 pJ per bit per channel70,71.
In terms of signal quality enhancement achieved after compensation, electronic neural networks72 can reach a Q-factor improvement of 2 dB with a BER of about 1.1 × 10⁻³, while photonic–electronic hybrid networks73 can achieve an improvement of about 0.8 dB with a BER around 10−4.
Our device achieves a BER of 2 × 10⁻⁴ after 60 km of transmission at an input power of 5.4 dBm, corresponding to a Q-factor improvement of approximately 4.6 dB (see Fig. 5b). It operates at 4.4 fJ per operation, outperforming DSP and electronic neural-network processing as well as previously reported photonic neural-network implementations, as summarized in Table 1.
This performance enhancement stems from our reservoir architecture, which primarily relies on integrated passive and low-power active elements (see Supplementary Note 4.2). The design enables parallel processing with concurrent encoding, thus reducing peripheral overhead, eliminating redundant computational layers, and minimizing iterative losses.
Unlike conventional reservoir architectures that rely on sequential or interleaved data injection, our approach processes all wavelength channels concurrently within a single unit, thus enabling true parallelism. Combined with dense encoding, this removes the latency bottleneck and allows throughput to scale directly with the number of available channels. However, the maximum processing speed is constrained by the intrinsic carrier dynamics of the SOA and by the operational boundaries set to avoid saturation, which together define the highest achievable computational throughput. Under our operating conditions, and using the equation derived in Supplementary Note 4.1 (Eq. 21), the maximum distortion-free throughput is theoretically estimated at 24 TOPS per channel. It must be noted that while the architecture can support this level of throughput, its practical performance is lower due to the limited bandwidth of the encoding hardware.
Further scalability in processing can be achieved through dense wavelength-division multiplexing (DWDM), which provides the spectral density required for massively parallel operation. For instance, with 80 channels, as is typically achieved in standard DWDM, the architecture can reach a combined throughput of nearly two peta-operations per second (POPS) under binary modulation. By employing phase-sensitive processing and higher-order modulation formats, such as 64-quadrature-amplitude modulation (6 bits per symbol), the effective throughput can increase to several tens of POPS. Integrated multi-wavelength sources based on nonlinear processes such as four-wave mixing in microresonators enable this capacity by supplying many stable, phase-coherent channels on a single chip74,75,76,77,78.
These findings open new avenues for the development of affordable, scalable neuromorphic platforms to address the growing demand for ultra-fast, energy-efficient solutions in next-generation photonic signal processing and AI applications.
Methods
Device architecture
The device’s figure-eight cavity design (see Fig. 1) can be divided into input, processing (i.e., the reservoir or unit), and output stages, all of which contribute to the overall round-trip time and thereby cause the reservoir’s memory to fade. The input loop comprises a variable optical VOA (Thorlabs, V1550A) that controls the signal power, a 10:90 coupler that monitors the system, a 50:50 coupler that injects the modulated signal, and a second coupler that splits the signals into clockwise and counterclockwise directions in the NALM configuration. The NALM loop is composed of an SOA (Inphenix C-Band IPSAD1505) and an integrated 45 cm-long SW. This waveguide is fabricated from a CMOS-compatible, highly doped silica glass52,53,78,79,80,81,82,83. As such, the SW features high mode confinement due to the small waveguide profile (2 × 2 µm2), with group velocity dispersion coefficients of \({\beta }_{2}\) ∼ 10 ps2 km−1 and \({\beta }_{3}\) ~ 0.26 ps3 km−1 at 1550 nm, as well as a large third-order nonlinear coefficient of γ = 220 W−1 km−1. The SW, together with the phase shift mechanism between the two counter-propagating fields, performs the overall nonlinear activation function of the reservoir52,53. The SOA operates between the linear and nonlinear regimes, far from saturation, to avoid instabilities. These include self-oscillation and chaotic behaviors, as well as noise amplification and signal fluctuations, which would be detrimental to the current tasks. A polarization controller (PC) was used to select and optimize the transmission power of one field component, specifically either the transverse electromagnetic or magnetic field. Simultaneously, an optical bandpass filter (200 GHz) was used to limit the spectral bandwidth of the propagation fields, thereby improving the signal-to-noise ratio (SNR) and system stability by eliminating unwanted amplified spectral components. A 90:10 optical coupler is used to extract a fraction of the optical power from the loop to obtain a readout of the dynamic evolution of the node states, utilizing high-bandwidth photodiodes (PDs, Finisar XPDV21x0R series, 50 GHz bandwidth) and a digital oscilloscope (OS, Agilent DSO-x92804a, 28 GHz bandwidth). An additional OS is employed to perform the nonlinear recovery task. The overall length of the cavity is 14 m, corresponding to a round-trip time of approximately \({\tau }_{r}=75{{\rm{ns}}}\).
Information encoding and readout
We encode information (i.e., bits) in time-dependent vectors \({{{\rm{u}}}}_{{{\rm{i}}}}\left({{\rm{n}}}\right)\) by means of different arbitrary waveform generators (AWGs) (Keysight M8196A, 92 GSa s-1, 2 channels each), each driving an equal number of electro-optical Mach-Zehnder intensity modulators (IMs) (Optilab IML-1550-40-PM-V-HER, 40 GHz, polarization-maintaining, high extinction ratio, \({V}_{\pi }\) = 3 V). All modulators were synchronized using an external clock. The IMs were excited by the time-varying voltage signal containing the data, which in turn modulated the independent laser modes (i.e., the wavelength channels) produced by a narrowband continuous multi-wavelength (CW) source (ID Photonics CoBrite DX G, 4 outputs, linewidth <100 kHz). An additional CW source (Tunics T100S-HP, single output, linewidth <5 MHz) was employed to provide the fifth channel. The injected power per channel ranged from 1 mW to 5 mW, depending on the task. The applied voltage to the IMs varied between [-\({V}_{\pi }/2\), \({V}_{\pi }/2\)], ensuring operation within their linear regime. When multi-processing is performed, the input channels are injected into the device via wavelength division multiplexing (WDM) using a waveshaper (WS).
The reservoir nodes are established by first sampling and holding the input signal containing data for a duration \(\tau \approx {\tau }_{r}\), then multiplying the signal by a uniformly distributed, multi-level random mask \(R\left(n\right)\), with values ranging between −1 and 1. The mask has a sampling period \({{\rm{\tau }}}\) and duration \({{\rm{\theta }}}\) per level, such that \({E}_{{{\rm{in}}}}\left(n\right)=u\left(n\right)\cdot R\left(n\right)\), where \({E}_{{{\rm{in}}}}\left(n\right)\) is the resulting input signal to the device. This procedure maps the signal onto a higher-dimensional space by generating a number of ‘virtual’ node states (i.e., internal variables)84, the number of which is given by \({N}_{v}=\tau /\theta\). A slight desynchronization, \(\delta \approx \theta\), was applied to the sampling period \(\tau\) on the AWG input sequence to ensure that all node states were dependent on neighboring nodes17.
For dense encoding, we input more than one bit of information (\({n}_{{{\rm{b}}}}\)) in the reservoir per round-trip \({{{\rm{\tau }}}}_{{{\rm{r}}}}\). We apply the sample and hold procedure over the asynchronous sampling rate (i.e., the inverse of the masking rate) of duration \({{\tau }_{{{\rm{r}}}}}^{{\prime} }={\tau }_{{{\rm{r}}}}/{n}_{{{\rm{b}}}}+\delta {\prime}\) to generate \(N\hbox{'}\) time-multiplexed transient states of duration \({\theta }^{{\prime} }={{\tau }_{{{\rm{r}}}}}^{{\prime} }/{N}_{v}^{{\prime} }\), for each \({{\tau }_{r}}^{{\prime} }\) time interval.
The small desynchronization \(\delta {\prime}\) \(\approx \theta {\prime}\) between the sampling and injection rates causes a progressive shift in the input seen by adjacent virtual nodes and by nodes across round-trips, ensuring that neighboring nodes access distinct input segments over time and maintain the data correlation required for reservoir computing processing.
The output states, \({x}_{i}\left(n\right)\), are measured from the virtual nodes at time intervals \(\theta\) (or \({\theta }^{{\prime} }\)) by using the PDs and OS. De-multiplexing using the WS is applied in cases of parallel computations. The average output power ranges from 100 μW to 300 μW per individual input channel.
M-bit delayed XOR task
To formally describe the m-bit delayed XOR task85, we define the operation within a logical framework. Given the input bit sequence \({\{x(n)\}}_{m}\) with delay \(n\) and the number of bits \(m\), the output sequence \({\{{y}_{n}\}}_{m}\) can be described by the following equation:
where \({x}_{n}\) and \({y}_{n}\) are the current and output bits at time \({{\rm{n}}}\), respectively.
Time series prediction tasks
The Mackey-Glass (MG) time series is defined by the following equation:
in which \({y}_{{{\rm{MG}}}}(t)\) is the output at a time \(t\), \(\tau\) is the delay time, \(\beta\) is the growth rate, \(h\) is the decay rate, and \(p\) is the nonlinear parameter. Parameters were set as follows: \(\tau=17,\beta=0.2,h=0.1,p=10\). To simulate MG time series behavior, \({{\rm{t}}}\) was discretized using a time step \(\Delta t=1\) to produce values \(x(t\equiv {t}_{k})\) at discrete time points \({t}_{k}=q\Delta {{\rm{t}}}\) for \(q=0,1,2,\ldots\).
The 10th-order Nonlinear Auto Regressive Moving Average (NARMA10) series follows the equation
in which\(\,{y}_{N10}\,\left(t\right)\) is the output at time \(t\), \({{\rm{while}}}\) \(u(t)\) is the input, chosen as a random sequence from a uniform distribution \({{\rm{U}}}[0,1]\). Similarly to the MG task, we applied a discretized time step \(\Delta t=1\) to the NARMA10 time series temporal variable \(t\).
The time series were simultaneously and independently encoded onto two wavelength channels generated by the multi-output CW source. Two IMs and AWG channels drove this process. Following the previously described single-bit encoding technique, both signals were multiplexed using the WS and then injected simultaneously into the device. They were then de-multiplexed and read with the OS. Offline training (as detailed in the following sections) was performed on the two datasets collected.
Nonlinear telecom signal recovery task
The nonlinearly distorted signal, which also carries information, was obtained by propagating the corresponding pristine signal through 60 km of SMF-28, with a dispersion parameter D = 18 ps nm−1 km−1 and an attenuation constant α = 0.24 dB km−1. An additional 1 m of highly nonlinear optical fiber (with γ = 0.78 W−1km−1) was added to account for the full extent of nonlinear effects over longer propagation distances, which is typical in telecommunications networks. The distorted signal, carrying 5 × (215 – 1) bits, was sequentially split into five subsequences of 215 – 1 bits each and then independently encoded into the five wavelength channels using five IMs and AWG channels. Each AWG channel was operated at ~6.5 GHz. All five channels were amplified to 5 mW using an erbium-doped fiber amplifier (EDFA, Keopsys, PEFA-SP-C-PM−27-B202), then multiplexed into the reservoir. The additional IM and AWG channel were used to create the temporal node transients \({\theta }^{{\prime} }\) via time multiplexing. These were implemented at a masking rate of approximately 24 GHz, creating 4 virtual nodes with a 20-level random mask, thereby enabling the encoding of 488 bits per round-trip. Offline training was performed on datasets built from the output node states of all five de-multiplexed wavelength channels, using the training procedure described in the following section.
Offline training
We employed a k-fold cross-validation approach, with k set to 5 for the MG and NARMA10 tasks and to 10 for the nonlinear channel equalization task. We then split the output datasets, consisting of \({x}_{i}\) values, into equally sized k subsets. The machine learning (ML) model was trained using ridge regression on \(k-1\) folds and validated on the remaining fold. This process was repeated k times, with each fold used once as the validation set. For each fold, we determined the model’s accuracy by calculating the normalized root mean square error (NRMSE) as
in which \({\sigma }^{2}\) is the sample variance, \({y{\prime} }_{i}\) is the targeted output, and \({y}_{i}\) is the weighted output: \({y}_{i}={\sum }_{1}^{{N}_{v}}{W}_{{ij}}^{{{\rm{out}}}}{x}_{j}\).
Finally, we calculated the average error across all iterations to obtain a more robust estimate of the model’s overall performance.
Simulations for nonlinear channel equalization
We employed a 10,000-pseudorandom binary sequence (PRBS) extracted from the experimentally generated distorted signal. We then sampled the signal using ultra-dense encoding, mirroring the experimental procedure previously described. We injected 488 bits per cavity round-trip over four nodes into a single channel. The device response was numerically simulated using the generalized nonlinear Schrödinger equation (GNLSE) and then implemented in MATLAB (see Supplementary Note 1).
Data availability
The data supporting the findings of this work study are available both within this article and in the Supplementary Information. The raw data generated from this study is available from the corresponding authors upon request.
Code availability
The numerical codes related to this study are available from the corresponding author upon request.
References
Hecht, J. The bandwidth bottleneck that is throttling the Internet. Nature 536, 139–142 (2016).
Feldmann, J. et al. Parallel convolutional processing using an integrated photonic tensor core. Nature 589, 52–58 (2021).
Chen, Y. et al. All-analog photoelectronic chip for high-speed vision tasks. Nature 623, 48–57 (2023).
Feldmann, J., Youngblood, N., Wright, C. D., Bhaskaran, H. & Pernice, W. H. P. All-optical spiking neurosynaptic networks with self-learning capabilities. Nature 569, 208–214 (2019).
Ashtiani, F., Geers, A. J. & Aflatouni, F. An on-chip photonic deep neural network for image classification. Nature 606, 501–506 (2022).
Merolla, P. A. et al. A million spiking-neuron integrated circuit with a scalable communication network and interface. Science 345, 668–673 (2014).
Shastri, B. J. et al. Photonics for artificial intelligence and neuromorphic computing. Nat. Photon. 15, 102–114 (2021).
Xu, Z. et al. Large-scale photonic chiplet Taichi empowers 160-TOPS/W artificial general intelligence. Science 384, 202–209 (2024).
Strubell, E., Ganesh, A. & McCallum, A. Energy and Policy Considerations for Modern Deep Learning Research. In Proc. AAAI Conference on Artificial Intelligence vol. 34, 13693–13696 (AAAI Press, Palo Alto, CA, USA, 2020).
Patterson, D. et al. Carbon Emissions and Large Neural Network Training. Preprint at https://doi.org/10.48550/arXiv.2104.10350 (2021).
Fu, T. et al. Optical neural networks: progress and challenges. Light Sci. Appl. 13, 263 (2024).
Xia, S. et al. Deep-learning-empowered synthetic dimension dynamics: morphing of light into topological modes. Adv. Photonics 6, 026005 (2024).
Baby, D., Van Den Broucke, A. & Verhulst, S. A convolutional neural-network model of human cochlear mechanics and filter tuning for real-time applications. Nat. Mach. Intell. 3, 134–143 (2021).
Dehner, C., Zahnd, G., Ntziachristos, V. & Jüstel, D. A deep neural network for real-time optoacoustic image reconstruction with adjustable speed of sound. Nat. Mach. Intell. 5, 1130–1141 (2023).
Wang, J., Lu, S., Wang, S.-H. & Zhang, Y.-D. A review on extreme learning machine. Multimed. Tools. Appl. 81, 41611–41660 (2022).
Fischer, B. et al. Neuromorphic computing via fission-based broadband frequency generation. Adv. Sci. 10, 2303835 (2023).
Van der Sande, G., Brunner, D. & Soriano, M. C. Advances in photonic reservoir computing. Nanophotonics 6, 561–576 (2017).
Rafayelyan, M., Dong, J., Tan, Y., Krzakala, F. & Gigan, S. Large-scale optical reservoir computing for spatiotemporal chaotic systems prediction. Phys. Rev. X 10, 041037 (2020).
Bueno, J., Brunner, D., Soriano, M. C. & Fischer, I. Conditions for reservoir computing performance using semiconductor lasers with delayed optical feedback. Opt. Express 25, 2401–2412 (2017).
Vandoorne, K., Dambre, J., Verstraeten, D., Schrauwen, B. & Bienstman, P. Parallel Reservoir Computing Using Optical Amplifiers. IEEE Trans. Neural Networks 22, 1469–1481 (2011).
Lupo, A., Picco, E., Zajnulina, M. & Massar, S. Deep photonic reservoir computer based on frequency multiplexing with fully analog connection between layers. Optica 10, 1478–1485 (2023).
Paquot, Y. et al. Optoelectronic reservoir computing. Sci. Rep. 2, 287 (2012).
Guo, X. et al. Photonic implementation of the input and reservoir layers for a reservoir computing system based on a single VCSEL with two Mach-Zehnder modulators. Opt. Express. 32, 17452–17463 (2024).
Vinckier, Q. et al. High-performance photonic reservoir computer based on a coherently driven passive cavity. Optica 2, 438–446 (2015).
Sorokina, M. Multi-channel optical neuromorphic processor for frequency-multiplexed signals. J. Phys. Photonics 3, 14002 (2020).
Sorokina, M., Sergeyev, S. & Turitsyn, S. Fiber echo state network analogue for high-bandwidth dual-quadrature signal processing. Opt. Express 27, 2387–2395 (2019).
Appeltant, L. et al. Information processing using a single dynamical node as complex system. Nat. Commun. 2, 468 (2011).
Larger, L. et al. High-speed photonic reservoir computing using a time-delay-based architecture: million words per second classification. Phys. Rev. X 7, 011015 (2017).
Wan, Z. et al. Nonlinear equalization based on pruned artificial neural networks for 112-Gb/s SSB-PAM4 transmission over 80-km SSMF. Opt. Express 26, 10631–10642 (2018).
Argyris, A., Bueno, J. & Fischer, I. PAM-4 transmission at 1550 nm using photonic reservoir computing post-processing. IEEE Access 7, 37017–37025 (2019).
Li, S., Ohlendorf, S. & Pachnicke, S. 100 km 56 GBd PAM-4 transmission using photonic reservoir computing. In 45th European Conference on Optical Communication (ECOC, 2019).
Gooskens, E., Sackesyn, S., Dambre, J. & Bienstman, P. Experimental results on nonlinear distortion compensation using photonic reservoir computing with a single set of weights for different wavelengths. Sci. Rep. 13, 21399 (2023).
Li, R.-Q. et al. Scalable wavelength-multiplexing photonic reservoir computing. APL Mach. Learn. 1, 036105 (2023).
Gooskens, E. et al. Wavelength dimension in waveguide-based photonic reservoir computing. Opt. Express 30, 15634–15647 (2022).
Xu, X. et al. 11 TOPS photonic convolutional accelerator for optical neural networks. Nature 589, 44–51 (2021).
Jiang, Y., Zhang, W., Yang, F. & He, Z. Photonic convolution neural network based on interleaved time-wavelength modulation. J. Light. Technol. 39, 4592–4600 (2021).
Zhang, X. et al. 224-Gbps single-photodiode PAM-4 transmission with extended transmitter bandwidth based on optical time-and-polarization interleaving. Opt. Express, OE 28, 21155–21164 (2020).
Wang, D., Nie, Y., Hu, G., Tsang, H. K. & Huang, C. Ultrafast silicon photonic reservoir computing engine delivering over 200 TOPS. Nat. Commun. 15, 10841 (2024).
Nakajima, M., Tanaka, K. & Hashimoto, T. Scalable reservoir computing on coherent linear photonic processor. Commun. Phys. 4, 20 (2021).
Hünefeld, G. et al. Neuromorphic reservoir for nonlinear optical signal equalization. In Proc. SPIE 12880, Physics and Simulation of Optoelectronic Devices XXXII, 128800H (SPIE, 2024).
Adams, L. E., Kintzer, E. S. & Fujimoto, J. G. All-optical clock recovery using a modelocked figure eight laser with a semiconductor nonlinearity. Electron. Lett. 30, 1696–1697 (1994).
Kues, M. et al. Passively mode-locked laser with an ultra-narrow spectral width. Nat. Photon. 11, 159–162 (2017).
Aadhi, A. et al. Highly reconfigurable hybrid laser based on an integrated nonlinear waveguide. Opt. Express 27, 25251 (2019).
Xiong, S. et al. Investigation of stable pulse mode-locking regimes in a NALM figure-9 Er-doped fiber laser. Opt. Express 31, 514–527 (2023).
Maass, W. Liquid State Machines: Motivation, Theory, and Applications. In Computability in Context 275–296 (IMPERIAL COLLEGE PRESS, https://doi.org/10.1142/9781848162778_0008 (2011).
Jaeger, H. The “echo state” approach to analysing and training recurrent neural networks-with an erratum note. GMD Rep. 148, 13 (2001).
Duport, F., Schneider, B., Smerieri, A., Haelterman, M. & Massar, S. All-optical reservoir computing. Opt. Express 20, 22783–22795 (2012).
Duport, F., Smerieri, A., Akrout, A., Haelterman, M. & Massar, S. Fully analogue photonic reservoir computer. Sci. Rep. 6, 22381 (2016).
Vandoorne, K. et al. Toward optical signal processing using photonic reservoir computing. Opt. Express 16, 11182–11192 (2008).
Tsurugaya, T. et al. Cross-gain modulation-based photonic reservoir computing using low-power-consumption membrane SOA on Si. Opt. Express 30, 22871–22884 (2022).
Tsurugaya, T. et al. Reservoir computing using on-chip XGM-based nonlinear processing by membrane SOAs on Si-MZI. J. Lightw. Technol. 42, 2859–2867 (2024).
Moss, D. J., Morandotti, R., Gaeta, A. L. & Lipson, M. New CMOS-compatible platforms based on silicon nitride and Hydex for nonlinear optics. Nat. Photon. 7, 597–607 (2013).
Razzari, L. et al. CMOS-compatible integrated optical hyper-parametric oscillator. Nat. Photonics 4, 41–45 (2009).
Kharraz, O. M., Atieh, A., Zamzuri, A. K. & Mahdi, M. A. Enhanced gain saturation model of non-linear semiconductor optical amplifiers. IET Optoelectron 12, 263–268 (2018).
Dmitriev, P. et al. Analysis of time-delay photonic reservoirs for neuromorphic computing. in 2022 Photonics North (PN) 1–1 (IEEE, 2022).
Inubushi, M. & Yoshimura, K. Reservoir computing beyond memory-nonlinearity trade-off. Sci. Rep. 7, 10199 (2017).
Lever, J., Krzywinski, M. & Altman, N. Model selection and overfitting. Nat. Methods 13, 703–704 (2016).
Argyris, A., Bueno, J. & Fischer, I. Photonic machine learning implementation for signal recovery in optical communications. Sci. Rep. 8, 8487 (2018).
Agrawal, G. Nonlinear Fiber Optics (Academic Press, 2013).
Bandyopadhyay, S. et al. Single-chip photonic deep neural network with forward-only training. Nat. Photon. 18, 1335–1343 (2024).
Xu, X. et al. Photonic perceptron based on a kerr microcomb for high-speed, scalable, optical neural networks. Laser Photonics Rev. 14, 2000070 (2020).
Gu, Z., Ma, Q., Gao, X., You, J. W. & Cui, T. J. Direct electromagnetic information processing with planar diffractive neural network. Sci. Adv. 10, eado3937 (2024).
Hülser, T., Köster, F., Jaurigue, L. & Lüdge, K. Role of delay-times in delay-based photonic reservoir computing. Opt. Mater. Express 12, 1214–1231 (2022).
Tang, D., Wu, Z., Sun, Z., Tang, X. & Qiao, Y. Joint intra and inter-channel nonlinearity compensation based on interpretable neural network for long-haul coherent systems. Opt. Express 29, 36242–36256 (2021).
Song, J. et al. Real-time FPGA prototyping of a 15GBaud SP-16QAM coherent optical receiver with optimal interpolating for clock recovery and equalization. Opt. Express 30, 26774–26786 (2022).
Inoue, T., Matsumoto, R. & Namiki, S. Learning-based digital back propagation to compensate for fiber nonlinearity considering self-phase and cross-phase modulation for wavelength-division multiplexed systems. Opt. Express 30, 14851–14872 (2022).
LaCroix, M.-A. et al. 8.4 A 116Gb/s DSP-based wireline transceiver in 7nm CMOS achieving 6pJ/b at 45dB loss in PAM-4/Duo-PAM-4 and 52dB in PAM-2. In 2021 IEEE International Solid-State Circuits Conference (ISSCC) 64, 132–134 (IEEE, 2021).
Nagarajan, R. et al. Recent advances in low-power digital signal processing technologies for data center applications. J. Lightw. Technol. 42, 4222–4232 (2024).
Pillai, B. S. G. et al. End-to-end energy modeling and analysis of long-haul coherent transmission systems. J. Lightw. Technol. 32, 3093–3111 (2014).
Liu, Y. et al. Parallel wavelength-division-multiplexed signal transmission and dispersion compensation enabled by soliton microcombs and microrings. Nat. Commun. 15, 3645 (2024).
Staffoli, E., Maddinelli, G. & Pavesi, L. A silicon photonic neural network for chromatic dispersion compensation in 20 Gbps PAM4 Signal at 125 km and itsScalability up to 100 Gbps. J. Lightw. Technol. 43, 557–571 (2025).
Zhang, S. et al. Field and lab experimental demonstration of nonlinear impairment compensation using neural networks. Nat. Commun. 10, 3033 (2019).
Huang, C. et al. A silicon photonic–electronic neural network for fibre nonlinearity compensation. Nat. Electron. 4, 837–844 (2021).
Mazoukh, C. et al. Genetic algorithm-enhanced microcomb state generation. Commun. Phys. 7, 81 (2024).
Pasquazi, A. et al. Micro-combs: a novel generation of optical sources. Phys. Rep. 729, 1–81 (2018).
Bai, B. et al. Microcomb-based integrated photonic processing unit. Nat. Commun. 14, 66 (2023).
Aadhi, A. et al. Mode-locked laser with multiple timescales in a microresonator-based nested cavity. APL Photonics 9, 031302 (2024).
Di Lauro, L. et al. Parametric control of thermal self-pulsation in micro-cavities. Opt. Lett. 42, 3407 (2017).
Rowley, M. et al. Self-emergence of robust solitons in a microcavity. Nature 608, 303–309 (2022).
Ferrera, M. et al. Low-power continuous-wave nonlinear optics in doped silica glass integrated waveguide structures. Nat. Photon. 2, 737–740 (2008).
Bao, H. et al. Laser cavity-soliton microcombs. Nat. Photon. 13, 384–389 (2019).
Monika, M. et al. Quantum state processing through controllable synthetic temporal photonic lattices. Nat. Photon. 19, 95–100 (2025).
Yu, H. et al. Quantum key distribution implemented with d-level time-bin entangled photons. Nat. Commun. 16, 171 (2025).
Jaeger, H. Long short-term memory in echo state networks: details of a simulation study. Report (2012).
Karabchevsky, A. & Choudhary, A. On-Chip Photonics: Principles, Technology and Applications (Elsevier, 2024).
Acknowledgements
Funding. This work was supported by the Natural Sciences and Engineering Research Council of Canada (NSERC) through the Alliance and Discovery Grants Schemes, by the MESI PSR-SIIRI Initiative in Quebec, by the Canada Research Chair Program, as well as the Australian Research Council Centre of Excellence in Optical Microcombs for Breakthrough Science (COMBS) CE230100006. The work of L.D.L. was also supported by the Mitacs Elevate Postdoctoral Fellowship Program. The work of E.A.V. and A.V.K. was supported by the Ministry of Science and Higher Education of the Russian Federation, project no. FSER-2025-0025. The work of M.C. was supported by the Carl-Zeiss-Stiftung through the Nexus program (project P2021-05-025 SINABSE).
Author information
Authors and Affiliations
Contributions
A.A. realized the experiments. L.D.L. analyzed the experimental results, developed the theory, and wrote the manuscript. A.A., B.F., and I.A. contributed to the data analysis. P.D., N.P., and C.M. contributed to numerical simulations. E.A.V. and A.V.K. supported the analysis of theoretical and experimental data. E.A., E.A.V., A.V.K., M.C., S.V., P.R., D.J.M., and R.M. participated in scientific discussions. S.T.C. designed the integrated spiral waveguide. B.E.L. fabricated the chip. R.M. supervised the project. All authors reviewed and edited the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors L.D.L., A.A., B.F., P.D., P.R., A.E., and R.M. are inventors of a pending patent application: “System and Method for Optical Information Processing.” US18/810,064, filed on: 20/8/24; PCT/CA2022/050451, filed on: 25/3/22. The remaining authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks the anonymous reviewers for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Aadhi, A., Di Lauro, L., Fischer, B. et al. Scalable photonic reservoir computing for parallel machine learning tasks. Nat Commun 17, 1225 (2026). https://doi.org/10.1038/s41467-025-67983-z
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41467-025-67983-z
