
Abstract
Hand edema hinders mobility and quality of life, yet prevailing solutions—manual lymphatic drainage or bulky pneumatic devices—are costly, clinic-bound, and rarely personalized. We introduce EdemaFlex, a textile-integrated soft-robotic platform that generates participant-specific devices; here, we demonstrate a tubular jacquard-knit glove whose embedded shape-memory-alloy actuators deliver programmable distal-to-proximal compression. The actuators reach a therapeutic pressure of 20–30 mmHg within 2–3 s and provide distal-to-proximal sequential compression for multiple 30 min sessions. In a seven-participant “home-based study,” the EdemaFlex glove proved to be accessible for unsupervised use and feasible as a tool to reduce swelling, ensuring safety: hand volume decreased by up to 25%, digit and Figure-of-Eight circumferences by up to 9.3% and 4.7%, range of motion increased up to 50%, and dexterity (Box-and-Block test) improved by 8–150%. The EdemaFlex System offers a textile-based, soft-robotic platform for personalized edema therapy.
Similar content being viewed by others


Introduction
Hand edema, characterized by excessive fluid accumulation in the interstitial tissues, is a condition that affects mobility, dexterity, and overall quality of life. It is commonly associated with surgery, neurological disorders, and vascular dysfunction, causing discomfort and reduced hand function1. In clinical sub-populations, the incidence frequency of hand edema can reach up to 73% after stroke2, 40% following breast cancer treatment3,4, and as high as 80% during pregnancy5. If untreated or poorly managed, edema can progress to fibrosis, leading to contractures and permanent disability. Edematous tissue is also more susceptible to infection, such as cellulitis6. The severity and distribution of swelling are often non-uniform across the hand. Proximal joints such as the metacarpophalangeal (MCP) and proximal interphalangeal (PIP) joints tend to exhibit greater fluid accumulation than distal segments7. The onset and degree of swelling can also vary by etiology; for instance, lymphedema may be more pronounced on the ulnar side, while post-stroke edema often affects all digits but with varying severity8. Despite its prevalence, access to effective hand edema management remains limited by geographic, financial, and healthcare disparities9,10. These barriers underscore the need for a portable, home-based solution that enables self-managed, personalized compression therapy.
Conventional interventions, including manual lymphatic drainage (MLD), manual edema mobilization (MEM), compression therapy using elastic gloves or bands, pharmacological management, and surgical procedures, can reduce swelling but rely on trained professionals, hospital-based settings, or recurring clinical visits, making them costly and difficult to access for long-term management11,12. Manual therapies require frequent sessions with occupational or physical therapists, which introduces additional logistical and financial barriers. Compression garments may assist in maintaining reduced swelling, yet many patients require further intervention and do not achieve full resolution with compression alone. Moreover, pharmacological options remain limited and etiology-dependent, with sparse evidence supporting their efficacy1. Reported costs for professional therapy sessions and specialized compression systems can exceed hundreds of dollars per week, posing additional barriers for consistent use3. No commercial or academic solution delivers anatomically precise, programmable compression across the full hand in a portable, textile-based format (Table 1). These limitations have prompted growing research interest in soft robotic and smart-textile systems capable of delivering adaptive, body-conforming compression.
Advances in textile-integrated soft robotics have begun to address these limitations by offering actuated garments that adapt to the user’s anatomy and motion for rehabilitation and assistive technology13,14,15,16,17,18. Pneumatic actuators powered by external pumps have enabled exosuits and rehabilitation gloves14,15,18,19, but remain impractical for daily, unsupervised wear16,17,20,21,22. Emerging smart materials, such as dielectric elastomers23, shape-memory polymers (SMPs)24, and liquid crystal elastomers (LCEs)25, enable programmable shape changes yet generate insufficient force for therapeutic compression26.
In contrast, shape-memory alloy (SMA) actuators composed of nickel–titanium (NiTi, also known as nitinol) springs contract upon heating to deliver programmable compression. The spring configuration increases recoverable strain and flexibility compared with straight NiTi wires. SMAs operate through a thermally induced solid-state phase transformation between the martensite and austenite phases27. When heated above their transition temperature, NiTi springs transform from the deformable martensitic phase to the pre-set austenitic configuration, producing contraction. This mechanism is exploited in the EdemaFlex glove to deliver targeted pressure. Upon cooling, the springs return to martensite and can be reactivated through controlled Joule heating, enabling repeatable cycling. This reversible transformation yields a high force-to-weight ratio (typically exceeding 100 N g−1), making NiTi SMAs ideal for lightweight, textile-based actuation28.
NiTi-based actuators have been integrated into soft robotic garments, haptic interfaces, and assistive rehabilitation devices29,30. They have also been integrated into haptic and shape-changing interfaces31,32,33,34,35,36,37. Unlike Granberry et al.’s hysteresis-driven compression garments that provide uniform, large-area pressure after a single activation, EdemaFlex glove enables fine-grained, per-digit control through individually addressable SMA channels integrated within a knitted glove structure.
To translate personalized compression designs into scalable prototypes, a computerized knitting machine enables programmable placement of actuators or sensors within textiles16,38,39,40,41,42,43,44,45,46,47,48,49,50. Yet, participant-specific hand compression gloves produced by industrial knitting remain scarce. This design framework follows a co-design approach involving clinicians and researchers throughout the iterative glove development process, enabling collaborative determination of actuator placement, empirical adjustment of contact pressure, and customization for wearer comfort51.
Building upon prior prototypes, KnitDema34, which demonstrated single-finger SMA compression, and MediKnit31, which extended to partial palm coverage under controlled laboratory conditions, EdemaFlex glove introduces several key advancements beyond modular scaling:
(1) Co-design workflow: Developed a clinician-guided, participant-specific workflow that supports customizable, full-hand-scale fabrication and enables the placement of thirty-seven actuator channels within the Shima Seiki digital knitting environment.
(2) Full-hand prototype: Developed a digitally knitted glove with joint-scale actuation, delivering programmable distal-to-proximal compression across the fingers, palm, and wrist.
(3) Hardware system: Implemented a compact, portable, Bluetooth-enabled control board providing independent PWM control for all actuators, ensuring safe and reliable at-home operation.
(4) Mobile interface: Developed a participant-facing mobile interface that facilitates unsupervised use, session logging, a timer, and real-time visualization of actuator activity.
(5) In-the-wild study: Conducted the first home-based, unsupervised feasibility study of a joint-scale full-hand device, verifying therapeutic contact pressure (20–30 mmHg) and thermal safety across repeated 30-minute sessions performed two to three times per day for seven participants.
Despite progress in textile-based soft-robotics, co-design, and digital knitting, four persistent gaps therefore remain: (1) Limited validation outside laboratory environments, (2) Insufficient design adaptability for individual needs, (3) Absence of personalized, sequential compression, and (4) Lack of portable systems for daily unsupervised use.
This work presents EdemaFlex, a textile-soft robotic platform that integrates customizable digital fabrication, portable electronics, and a participant-facing mobile interface. The platform enables anatomically targeted compression through real-time, clinician-guided co-design, demonstrating a personalized knitted glove prototype that delivers programmable, sequential compression to the digits, palm, and wrist, and is suitable for daily home use.
Results
EdemaFlex platform and modular components overview
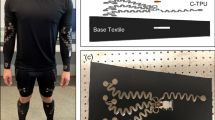
Figure 1a illustrates EdemaFlex Platform, which integrates digital knitting, textile-based soft-robotic actuation using SMA, hardware, and a participant-facing mobile user interface, all orchestrated through an iterative co-design process involving clinicians, researchers, and participants. A central component of this platform is a custom design tool that enables real-time collaboration between clinicians and researchers. Clinicians input individualized hand measurements and specify therapeutic recommendations for actuator placement to optimize fluid mobilization based on the participant’s venous and lymphatic drainage (Fig. 1b and c), while researchers support technical development. The embedded SMA placement and actuation mechanism are illustrated in Fig. 1d and e: a rapid joule heating effect (exceeding 33.3 ∘C at 2 V within seconds) triggers localized knit contraction, achieving up to 20% strain, while being thermally safe and wear comfortable.

a EdemaFlex represents a platform that integrates fabrication through a co-design workflow involving clinicians (light blue), participants (gray), and researchers (purple). Symbols under “Knit Programming” indicate stitch types: left = knit stitch; right = non-knitting (miss) stitch used in the tubular jacquard structure. The tubular jacquard knit alternates knit and non-knitting stitches between the front and back beds to form an internal tubular structure without surface floats. b and c Anatomical illustration of the hand’s venous and lymphatic system, highlighting lymphatic drainage pathways and mechanism of healthy vs. lymphatic obstruction, illustrating fluid buildup and how actuated knit compression facilitates fluid drainage toward the lymphatic system, d Robotic knit glove with embedded 37 SMA actuators for sequential compression in hand edema management. e The inset shows a cross-section of the SMA within the knit layers and its behavior in both inactivated and activated states. A thermal camera image captures the Joule heating effect, showing the SMA reaching over 33.3 ∘C at 2 V within seconds, inducing a maximum strain of 20%.
Figure 2a–d illustrates the EdemaFlex design tool workflow, which generates a glove bitmap pattern based on participant-specific hand measurements. Actuator placements, corresponding to the knit channels within the tubular jacquard, are customized for each individual, incorporating clinical input to avoid discomfort near bony prominences such as metacarpophalangeal joints. The finalized bitmap is converted into stitch codes using ShimaSeiki’s software (Fig. 2e and f, Apex4’s ‘KnitPaint’ and ‘KnitDesign’ programs), and then fabricated using a computerized flat-bed knitting machine (Fig. 2g, SRY123LP, ShimaSeiki). Design adaptation session supports real-time co-design between clinicians and researchers, allowing pixel-level adjustments to channel positioning. Each SMA is secured with crimp connectors for electrical actuation (Fig. 2h, inset). The final glove assembly provides full-hand coverage from digittips to wrist, aiming to preserve fit and comfort during wear.

a Hand measurement inputs entered into the design tool for automatic bitmap generation, b–d Screenshots of design tool interface. e Auto-generated bitmap imported into Shima Seiki Knit Design and converted to stitch codes. f Knit channels defining actuator paths. g Computerized knitting machine (computerized flat knitting machines, SRY123LP, ShimaSeiki). h EdemaFlex glove substrates; inset shows the tubular jacquard knit embedded with SMA spring. i Hardware control board. j–l Participant-facing mobile interface. j Session timer and sound alert. k Bluetooth connection and activity log. l Monitoring actuator location status on the main page.
The full-hand EdemaFlex glove features a tubular jacquard knit substrate with 37 embedded NiTi shape-memory alloy actuators, delivering sequential distal-to-proximal compression. Passive compression is achieved by the textile’s inherent elasticity, achieved through a double-knit (tubular jacquard knit) structure composed of Puma Stretch yarn (80% viscose, 20% elite, NM 2/28, Silk City Fibers) and Sting yarn (83% nylon, 17% spandex, Silk City Fibers), produced on a computerized V-bed knitting machine (SRY123 Shima Seiki, 12 gauge). Loop lengths settings of 32 (digits) and 45 (palm) (Shima Seiki units; approximately 3.2 and 4.5 mm yarn feed per stitch) were selected to balance elasticity and pressure retention. Active compression is delivered by SMA spring actuators threaded through pre-defined channels. These channels were guided by anatomical mapping of venous and lymphatic pathways and refined in collaboration with clinicians to optimize fluid mobilization52. Six SMA actuators per digit and seven across the palm were selected as a default configuration to provide fine-grained, distributed compression along each digit joint and palm segment, approximating the motion and pressure pattern of manual massage. This layout was established through iterative discussion with clinicians, who advised on actuator spacing and placement while maintaining comfort. During the fitting sessions, clinicians further adjusted actuator positions based on each participant’s hand anatomy and swelling condition, omitting actuators over sensitive or wounded areas, shortened digits, or palm regions where an actuator would overlap the MCP crease. This adaptive configuration ensured anatomical conformity and participant comfort while preserving consistent compression coverage.
The custom-designed four-layer printed-circuit board (Fig. 2i, 6.6 × 4.2 cm) provides independent pulse-width-modulated (PWM) drive signals for all 37 SMA channels while remaining lightweight and compact for forearm wear. To control up to 37 SMAs with individual PWM signals, three 16-channel PWM drivers (PCA9685) were paired with 19 2-channel MOSFETs (SSM6N58NU). The ESP32 microcontroller (ESP32-S3-WROOM-1) was chosen for its integrated Bluetooth capability. The board incorporates two regulated voltage systems: a 3.3 V system for logic control and a 7.4 V system for SMA actuation, powered by three rechargeable 3.7 V, 2000 mAh LiPo batteries. The PCB is housed in a flexible TPU 3D-printed enclosure attached via an adjustable armband, ensuring portability and usability. Verification tests demonstrated result-relevant performance: deep-sleep firmware reduced quiescent current from 90 to 0.03 mA after 1 min of inactivity, allowing the device to transit to deep sleep mode after every study session for power saving. The microcontroller also asynchronously staggers SMA activations within groups to minimize voltage spikes. Battery discharge tests confirmed sufficient power delivery across sessions: Batteries 1 and 2 (supplying SMA actuation) showed a tolerable drop from 4.1 to 3.61 V, and Battery 3 (supplying ESP32 microcontroller) remained at 3.86 V after three sessions, all above minimum voltage operating thresholds, confirming reliable power delivery for daily home use. With the 2000mAh batteries, it can last three 30-min sessions before recharging. The overall weight of the system, all components included, is around 305 g (0.67 lbs). LED indicators on the board provided visual feedback on connection status.
A progressive web application (PWA)53 enabled wireless control and session management through Web Bluetooth API54. The mobile interface includes: (1) a 30-min automated session timer with audio alerts and pause/resume functionality; (2) an interactive glove visualization displaying real-time actuator activity, and (3) multiple session logging for ground truth tracking and participant record with HIPAA-compliant anonymized data storage using browser local storage and CSV export functionality (Fig. 2j–l).
Functional performance evaluation
To program the actuator in the EdemaFlex glove, electrical and mechanical characterization was performed on isolated NiTi SMA springs and on identical springs embedded in the tubular-jacquard glove. Three key parameters were assessed: (1) actuator resistance per unit length, (2) shrinkage behavior across varying voltage inputs, and (3) optimal voltage levels (used for PWM adjustment) for achieving target strain levels—essential for delivering accurate, localized compression while ensuring thermal safety. The custom nitinol-based SMA (~250 μm diameter, Kellogg’s Research Labs) showed the mean resistance scaling linearly with length: 7.57 ± 0.19 Ω at 6 cm (digit) and 23.24 ± 0.75 Ω at 20 cm (palm). Under direct voltage drive, isolated digit SMA actuators contracted up to about 22.9 ± 3.1% at an applied voltage of 4 V for the digits, whereas palm actuators required 5 V to reach 24.6 ± 6.8% strain (Fig. 3b). When embedded in the tubular jacquard knitted glove, the shrinkage capacity of SMAs decreased substantially due to the textile’s mechanical resistance. At 4 V, the same digit actuators achieved 12.6 ± 1.4% strain (a 45% reduction), and palm actuators contracted by only 9.6 ± 1.4% (a 54% reduction)(Fig. 3c). This textile-constrained behavior is critical to understanding real-world usability and refining voltage control for safe use. To reach therapeutic interface pressures of 20–30 mmHg (2.6–3.9 kPa)55, the Laplace-based pressure model predicts that ~10% shrinkage in the digit segments and 15% in the palm is required. These strain targets correspond to operating windows of 3–4 V for digit SMA elements and 5–6 V for palm elements, as highlighted in Fig. 3c.

a Formula for calculating shrinkage percentage. b Shrinkage percentage as a function of applied voltage of isolated SMA actuators. c SMA-embedded textile, highlighting optimal voltage ranges are ~3–4 V for digits and ~5–6 V for palms to meet the target strains. d Measurement sites on the glove using force-sensing resistors (FSR) across digits and palm to capture localized compression (SMA actuator layout: six per digit (orange) and seven across palm and wrist (blue), totaling 37 actuators. (+) Indicate contact pressure measurement points). e Comparison of predicted and experimental contact pressures (CP) on the digits at target circumferential strains (5%, 10%, 15%) and corresponding applied voltages. f Comparison of predicted and experimental CP on the palm under equivalent strain and voltage conditions. g Experimental setup with glove and smartphone interface for real-time monitoring. h and i FLIR images showing finger and palm SMA regions heating to 37–38 °C during actuation and cooling back to room temperature within about one minute after current removal. h Thermal images of digit SMA actuators at initial and final rounds, showing temperature changes from 31.5 to 37.5 °C. i Thermal images of palm SMA actuators at initial and final rounds, showing temperature changes from 30.2 to 37.0 °C. j and k Participant-facing mobile user interface.
To relate SMA actuator-induced strain to contact pressure, the textile-integrated SMA actuators were analyzed across activation strains ranging from 5% to 15% under applied voltages between 1 and 6 V. The tubular-jacquard substrate exhibited an elastic modulus (E) of 0.16 MPa and a thickness (t) of 2.04 mm31. To estimate the contact pressure (CP) applied to the skin, we adapted Laplace’s law and Hook’s law using Formula (1) in the “Methods” section. The resulting expression, \({\rm{CP}}=\frac{2\pi Et\varepsilon }{C}\), predicted 1.71, 3.42, and 5.13 kPa at 5%, 10%, and 15% strain for a 60 mm digit circumference. For the palm, a circumference of 120 mm required approximately 15% strain to reach 2.57 kPa, the lower bound of the therapeutic window. On this basis, target strains were set at 10% for digits and 15% for the palm.
To deliver the target strain levels, the PWM duty cycle of the SMA drivers (12-bit resolution, 0–7.4 V output) was tuned using Formula (2). Based on the measured shrinkage performance, digit actuators required ~40.5% PWM duty cycle (1661/4096) at 3 V to achieve ~10% shrinkage relative to the textile-integrated SMA maximum shrinkage of 13% at 4 V. Palm actuators required ~67.6% PWM duty cycle (2768/4096) at 5 V to achieve ~15% shrinkage. The SMA actuation (via 7.4 V PWM) and control electronics (3.3 V logic) were powered independently to ensure stable and reliable operation. This systematic characterization enabled the SMA-integrated textile glove to deliver precise, participant-specific compression within the desired pressure.
To validate the theoretical contact pressure predictions, force-sensing resistors (Single Tact®, PPS UK Limited; 8 mm diameter) were placed between the skin and each of the 37 SMA actuators embedded in the textile glove. Force was converted to pressure by dividing by the active sensing area of 50.3 mm2. Two replicate measurements were recorded at each location (Fig. 3d); mean values and one-standard-deviation error bars are reported. Data were captured in real-time through a custom PCB board and a 12-bit PWM driver linked to an Arduino-based acquisition system. A typical force-time trace delineates the onset of SMA contraction, the sustained compression plateau, and the gradual force release as the alloy cooled after actuation ceased at t = 5 s.
Experimental contact pressures at nominal circumferential strains of 5%, 10%, and 15% were compared to the theoretical predictions. For the digits (Fig. 3e), passive textile compression produced 2.4–2.8 kPa (18–21 mmHg), exceeding the 1.71 kPa value expected from the thin-wall model at 5% strain. A similar divergence was observed on the palm (Fig. 3f). The discrepancy may be attributed to the glove’s double-layer tubular-jacquard construction, local bending stiffness, and the irregular curvature and heterogeneous compliance of hand tissues, all of which violate the model’s cylindrical and uniform-thickness assumptions. As such, Laplace’s law offers a first-order approximation in the context of wearables and must be applied cautiously. In addition to passive compression, the glove provides controllable active compression via SMA actuation. At 15% nominal strain, total pressures reached 5.56 ± 0.05 kPa (41.7 ± 0.4 mmHg) on the digits and 4.80 ± 0.16 kPa (36.0 ± 1.2 mmHg) on the palm, demonstrating the capacity to exceed mid-therapy levels (20–30 mmHg) when higher compression is clinically required.
Applying identical strain values to the digits and palm resulted in unbalanced pressures due to differences in local geometry, tissue compliance, and textile constraint. To address this, region-specific actuation settings were empirically determined to achieve balanced therapeutic pressures. Approximately 10% strain (2.5 V, PWM register ≈ 1500, 36% duty cycle) was applied to the digits, and 15% strain (6 V, PWM register ≈ 2700, 61% duty cycle) to the palm. These settings generated 2.9–3.6 kPa (22–27 mmHg) across all monitored sites, aligning with the 20–30 mmHg therapeutic window. The EdemaFlex glove showed potential to exceed mild therapeutic levels, reaching up to 5 kPa when higher compression is clinically required. The close correspondence between analytical targets and experimentally verified pressures confirms the robustness of the combined theoretical modeling and characterization framework for anatomically adaptive compression.
Thermal camera imaging was used to evaluate the thermal safety of the SMA-integrated textile glove during a continuous 30-min actuation cycle. Thermal images (FLIR ONE®, Teledyne FLIR LLC), captured at the beginning (first round) and end (final round) of each session confirmed that both digits and palm actuators maintained safe operating temperatures throughout the entire treatment period (Fig. 3g). Specifically, digit actuators exhibited initial temperatures of ~31.5 °C, rising to a maximum of ~37.5 °C by the end of the session, while palm actuators started at ~30.2 °C and reached a maximum of ~37.0 °C (Fig. 3h and i). These values lie well below the 43 °C threshold associated with cutaneous discomfort and far below the ≈44 °C limit for reversible thermal injury, indicating a comfortable safety margin56,57.
The steady-state behavior demonstrates that the double-layer tubular-jacquard substrate dissipates Joule heat efficiently through convection and conduction, preventing thermal accumulation even under continuous cyclic loading. After actuation ceased (PWM duty cycle set to 0%), the SMA temperature decreased to baseline within approximately one minute.
Home-based participant evaluation
A 3-day evaluation, including a 1-day home-based study, assessed the EdemaFlex glove’s feasibility and deployability outside a clinical setting. Quantitative and qualitative outcomes and device usability were evaluated. Seven adults (above 18 years) with clinically diagnosed hand edema completed a supervised 30-min intervention on Day 1, an unsupervised home-based study on Day 2, and a Day 3 follow-up survey and interview. A detailed study protocol, recruitment criteria, and assessment methods are provided in the section “Home-based feasibility study protocol”. Table 2 summarizes demographics, current management strategies, and self-reported edema severity; representative images of glove use and subsequent hand changes are shown in Fig. 4.

A Photographs of participants wearing custom-knit EdemaFlex gloves during intervention sessions. Images are shown in order (left to right, top to bottom): P1, P2, P3, P4, P6, and P7. The gloves were tailored to each individual’s hand geometry and therapeutic needs. B Representative pre- and post-session hand photographs from two participants (P2, top; P4, bottom). Red arrows indicate visible compression marks, demonstrating localized mechanical engagement of the device following a single 30-min at-home intervention.
To evaluate the short-term feasibility and impact of the glove on swelling, joint flexibility, and dexterity, several objective tests were conducted immediately before and after a 30-min session on Day 1. As an early-stage prototype, our objective is to evaluate feasibility, not efficacy.
Hand volume was quantified with a standard immersion volumetry protocol in which the participant’s hand was lowered to the ulnar styloid level, and the displaced fluid was weighed to the nearest 0.1 g (Fig. 5a). Three trials were taken immediately before and after the supervised 30-min EdemaFlex session on Day 1, and the mean values were reported.

a Schematic of the water displacement test used to quantify total hand volume via immersion-based volumetry. b Mean hand volume (mL) pre- and post-intervention for each participant (P1–P7), averaged from three measurements. Significant volume reductions were observed in P3, P5, and P7 (*p < 0.05), with P3 exhibiting the highest response (25%). Error bars represent standard deviation. c Illustration of the Figure-of-Eight method used to assess global hand circumference. d Percent reduction in Figure-of-Eight circumference measurements across participants. e Location of the DIP, PIP, and MCP on joints and digit-level summary of circumference reduction (%) presented as radar plots for each digit, averaged across the three joints (DIP, PIP, MCP); participant P2 was excluded because joint-level measurements were added after her baseline visit. Statistically significant decreases were observed in P1, P3, P6, and P7 (*p < 0.05), with a maximum reduction of 4.7% in P3.
Individual responses are shown in Fig. 5b. The largest absolute and relative reduction occurred in participant P3 (121 mL, 25%), who displayed the greatest baseline swelling and marked upper-limb immobility. Participant P7 showed a moderate decrease (33 mL, 14%). Participants P1, P2, P4, P5, and P6 exhibited smaller reductions of 2–5%. Statistically significant paired reductions were detected only in P3 and P7 (p < 0.05). Notably, both participants with the largest hand volume reductions (P3, P7) had limited hand use and relied on wheelchairs. Reduced voluntary hand movement may have contributed to persistent edema, with external compression supporting fluid mobilization despite restricted lower-limb mobility. Importantly, the 25% reduction observed in P3 and the 14% reduction in P7 exceed the minimal clinically important difference (MCID) typically referenced in upper-limb edema studies, which often cite a reduction threshold of 5–10% as clinically meaningful58,59.
Next, global hand circumference was measured with the Figure-of-Eight technique, which traces a reproducible path over the wrist and metacarpals, beginning from radial styloid (Fig. 5c). All participants (P1 through P7) showed reductions in global hand circumference (Fig. 5d). The largest decrease occurred in P3 (−4.7%), followed by P1 and P6 (−3.2% each), P2 (−2.4%), and P7 (−2.3%). Paired comparisons confirmed that these five changes were significant (p < 0.05). Notably, P4 and P5 exhibited only minimal reductions (0.2% and 0.5%, respectively), which may be attributed to differences in baseline edema characteristics and the limitations of global measurement sensitivity. For P4, the presence of chronic congestive heart failure, combined with the absence of active edema treatment for over a decade, suggests the possibility of fibrotic swelling less responsive to a 1-session intervention. P5 recorded the lowest baseline hand volume (Fig. 5b) and was already using both pharmacological and mechanical therapies; the condition, therefore, appeared well controlled. Although no standardized MCID is formally established for the Figure-of-Eight method, previous studies suggest that changes of 2–3% may represent a meaningful response in upper-limb edema58,59. Based on this range, five participants demonstrated reductions exceeding this threshold, supporting the potential clinical relevance of the observed changes.
To investigate spatial variation in therapeutic effects, joint- and digit-level circumference measurements were performed across the metacarpophalangeal (MCP), proximal interphalangeal (PIP), and distal interphalangeal (DIP) joints of all five digits. Circumference was recorded at the MCP, PIP, and DIP joints of every digit in six participants (P1, P3–P7); P2 was omitted because joint measurements were not introduced until after her baseline visit. Measurements were taken immediately before and after the intervention and averaged across two trials. This approach enabled quantification of localized edema responses not captured by global methods such as the Figure-of-Eight (Fig. 5d). Radar plots (Fig. 5e) were used to illustrate the distribution and inter-digit variation of circumference reduction within each participant, highlighting relative differences across digits rather than absolute magnitudes. All six participants exhibited digit-level circumference reductions following the intervention, with varying patterns of response across digits. Notably, P3 and P5 showed marked reductions in the index and pinky digits, while P4 and P7 demonstrated more evenly distributed but moderate changes. The largest local changes occurred at the pinky-MCP of P5 (−9.3%), index-DIP of P3 (−9.0%), thumb-PIP of P7 (−7.6%), thumb-MCP of P6 (−6.8%), ring-MCP and index-PIP of P1 (−5.4%), and index-PIP of P4 (−5.1%).
Several joint-specific reductions exceeded the 8.5% threshold considered clinically meaningful in post-surgical upper-limb lymphoedema58. This outcome highlights the therapeutic potential of EdemaFlex gloves’ spatially programmable compression, which enables anatomically targeted pressure delivery at focal sites.
To evaluate changes in digit mobility, the range of motion (ROM) at the MCP and PIP joints was assessed using goniometric measurements (Fig. 6a and b). Circumferences were measured at the MCP, PIP, and DIP joints for digits 2–5 (Index-little finger), and at the MCP and proximal segment corresponding to the IP location (referred to as ‘PIP’ for consistency) for the thumb. Flexion angles were recorded for all five digits (Index, Middle, Ring, Pinky, and Thumb) across seven participants, with values averaged from two repeated measurements per joint. Two readings per joint were averaged to minimize participant fatigue; although this limited formal statistical testing, consistent upward trends were evident in all seven participants.

Anatomical illustrations demonstrating flexion measurement setups for MCP (A) and PIP (B) joints. C Mean MCP and PIP flexion values (°) pre- and post-intervention. D Detailed PIP flexion results, emphasizing improvements in joint range of motion following the intervention (Note: For the thumb, the interphalangeal (IP) joint corresponds to the location labeled as PIP for the other digits). E Illustration of the Box and Block Test (BBT) used to assess hand dexterity. Note: P1 and P3 have decreased strength in the upper extremity (UE) secondary to neurologic impairment. F Pre- and post-intervention BBT scores indicate improvements in dexterity. Error bars represent standard deviations (SD).
The intervention elicited clear gains in joint mobility. Mean MCP flexion increased by 12.8% (P1), 13.0% (P2), 29.3% (P3), 50.0% (P4), 6.5% (P5), 29.4% (P6), and 17.0% (P7) (Fig. 6c). Mean PIP flexion rose by 15.0% (P1), 14.8% (P2), 26.1% (P3), 24.5% (P4), 9.8% (P5), 6.8% (P6), and 2.8% (P7) (Fig. 6d). No studies in the search results establish explicit MCID thresholds for digit ROM. However, these values exceed the 5°−12° at the MCP minimal detectable differences (MDD) reported for the digit manual goniometer60,61.
Notably, participants with the most restricted baseline mobility—P1 (wheelchair user), P3 (neurologic impairment), and P4 (systemic inflammatory disease)—exhibited the largest relative ROM gains, underscoring the heterogeneity of functional capacity in hand edema. These findings suggest that anatomically adaptive compression delivered by EdemaFlex may be particularly effective for restoring mobility in individuals with limited voluntary movement.
Hand dexterity was assessed with the Box-and-Block Test (BBT; Fig. 6e)62. Each participant completed two 60 s trials in each direction. Block-transfer counts rose in every participant able to perform the task (Fig. 6f). The test was performed in both directions (right-to-left and left-to-right), repeated at least two times. As shown in Fig. 6f, improvements were observed in all participants except P3. P3 was unable to complete the test due to upper extremity impairment. P1, who has baseline hemiparesis, showed a 150% increase in performance post-intervention. P2, P5, P6, and P7 demonstrated increases ranging from 14% to 18%. According to previous studies, a change of 5.5 blocks is considered the minimal clinically important difference (MCID) for the BBT in upper-limb rehabilitation63,64,65. Although our studies are centered on feasibility rather than efficacy, according to this criterion, a participant (P6) achieved clinically meaningful improvements in manual dexterity.
Participant user experience and perceptions of EdemaFlex were observed through (1) semi-structured interviews, (2) pre- and post-study surveys, (3) device usage logs collected via the participant-facing mobile application, and (4) pain levels over 24-h from self-reported data were obtained from a responsive sheet during at-home intervention.
Device usage logs collected via the participant-facing mobile application provided quantitative evidence of real-time engagement, visualized in Fig. 7, which maps the time-of-day usage sessions alongside self-reported pain levels using a visual analog scale (VAS) for participants P1 through P7. During at-home intervention (in Day 2), the longest cumulative activation time was recorded by P6 (119 min across four sessions), followed by P3 (94 min, three sessions), P5 (91 min, three), P1 (77 min, three), P2 (60 min, two), P7 (43 min, two), and P4 (30 min, one). P5 showed the clearest pattern: pain declined from moderate (VAS 4–5) to mild (2–3) after both morning and late-evening sessions, matching the participant’s qualitative report that those periods provided the greatest relief. P6 displayed similar but smaller post-session reductions, particularly after evening use. P4 registered a single evening session with pain remaining low and stable, whereas P7 maintained a consistently minimal pain score throughout the day and use. In P2, pain fluctuated independently of the two sessions, and P1 and P3 exhibited little pre-/post-difference despite regular activation, underscoring the heterogeneous and context-dependent nature of symptom expression.

a Individual patterns of device usage and self-reported pain levels in visual analog scale (VAS, 0–10) across six participants (P1–P6) during at-home EdemaFlex deployment. Each plot illustrates time-of-day sessions when the glove was activated (shaded bars) and pain ratings recorded throughout the day. b Photographs of the EdemaFlex glove and usage (left: the full device kit, middle: Participant engaging in a Home-based session, right: Close-up of the glove in use).
The post-intervention survey comprised 33 structured questions systematically classified into usability, comfort, sensory perception, safety, and overall experience, built off of established research guidelines for evaluating wearability factors66,67,68,69. Responses were recorded on a Seven-point Likert Scale (1 = strongly disagree, 7 = strongly agree).
Survey responses reflected consistently high satisfaction across domains. Notably, thermal safety received the highest median score (7.0), with no adverse events reported. Other top-scoring categories included ease of use, software usability, wearability and comfort, perceived therapeutic effectiveness, and overall satisfaction compared to typical management (medians: 6.5). Device reliability and portability scored lower (6.0 and 5.0, respectively), mainly due to feedback on mechanical robustness and wiring complexity on the current prototype.
Participants gave favorable feedback on usability and comfort. P3 commented, "It wasn’t bothersome wearing the glove and armband for a long time” and preferred to keep it on continuously while reactivating sessions rather than removing it. P5, who initially anticipated a basic textile compression glove, described the actual experience as "much more impressive than anticipated,” and expressed sustained interest in continued use.
In terms of wearability and sensory perception, participants rated the perceived therapeutic effectiveness of the device at a median of 6.0, indicating overall satisfaction with its ability to relieve edema symptoms. Several participants (P2, P5, P6) noted that swelling varied throughout the day, which in turn affected the glove’s fit and comfort. For instance, P5 commented, "In the morning, it felt good. At night, it felt good. But in the afternoon, when the edema was worse, it was less comfortable.”
In comparing EdemaFlex with existing therapeutic solutions, the median score was 6.5, suggesting a generally favorable perception. P3 reflected on his prior experience with Bioness®, acknowledging its effectiveness but describing it as "a pain at times” due to its bulk and complexity in daily use. In contrast, he remarked that "once [EdemaFlex] was on, it was easier. Yeah, definitely,” highlighting its relative simplicity once donned. He also noted that Bioness® was "robust and hard,” whereas EdemaFlex was lighter and easier to use. P5 agreed that EdemaFlex offered superior therapeutic benefits due to its combined compression and warmth features: "This glove is amazing because you have the warm manner and the massage,” she emphasized, adding that she would prefer to use it "at least once a day or twice a day” in place of her regular compression gloves. P6 remarked that the treatment "almost impacted my mood because I was calmer,” attributing this effect to reduced swelling. Additionally, she observed improved digit sensitivity and gripping ability, stating, "My tips of the digits might’ve been slightly more sensitive and it was easier to grip things.” Finally, P6 contrasted EdemaFlex with prior self-care measures, such as heat/ice massage, remarking that those were "only semi-helpful,” whereas EdemaFlex "reached the skin, joints, and surrounding musculature, and the difference was immediately noticeable after each session.”
Regarding the feasibility of incorporating the device into their daily routine, several participants (P2, P3, P5, and P7) noted that it could be easily integrated into their schedules without disrupting existing habits. As P7 shared, "You could read a book, talk on the telephone… if you’re only doing it for half an hour, there’s no reason why you can’t fit it in your schedule. It’s a good mental break’to relax, meditate… it was a good experience.” P2 observed: "It’s good for stationary activities, but wearing it for several hours while moving around is hard to imagine.” While dynamic integration was more limited due to wiring, participants consistently valued the glove’s compatibility with seated, self-directed home use.
Portability and device reliability received the lowest scores. These ratings were mainly attributed to the mechanical fragility and wiring complexity of the current, early-stage prototype. P5 expressed concern about the number of components, stating she remained stationary to avoid disconnection: "I propped the glove on a pillow during use.” P7 similarly observed that, while the glove was lighter and more focused than her pneumatic sleeve, the hardware unit shifted during use: "That black part where all the wires are—that’s cumbersome. I was afraid something would disconnect.” These experiences underscore future work in interconnect streaming and hardware miniaturization.
Discussion
EdemaFlex was designed to provide full-hand, participant-specific compression, support unsupervised home use, and ensure safety during daily operation. Through clinician-guided mapping, the glove delivered compression to every digit, the palm, and the wrist, thereby extending the scope of earlier single-digit or partial-hand devices such as KnitDema34 and MediKnit31. All components–the glove, TPU-cased electronics, and smartphone interface–fit within a headphone-sized carrying case, and textile-integrated NiTi SMA actuators consistently delivered localized compression in the therapeutic range of 20–30 mmHg (2.6–3.9 kPa) while surface temperatures remained below 44 ∘C, confirming comfort and safety during prolonged wear in a home-based feasibility study56,57.
Shape-memory alloy actuators were adopted for their silent, compact, and textile-compatible performance, enabling localized compression without external pumps or bulky hardware. This design allows the EdemaFlex glove to remain lightweight and portable, supporting safe, unsupervised use in home environments. Such accessibility is important because untreated or poorly managed edema can lead to chronic swelling, fibrosis, and progressive loss of joint mobility.
Previous studies have investigated SMA-integrated textiles for adaptive compression. Unlike the related work’s hysteresis-maintained compression garments27, which switch to a sustained state after a single heat input, our system delivers on-demand, per-digit, multi-channel sequences that create programmable distal-to-proximal waves within seconds, enabling therapies that require time-varying patterns rather than a single maintained level. Because each SMA is individually integrated within a tubular knitted channel, our approach achieves finer spatial granularity, targeting localized regions such as individual fingers, the palm, and the wrist through seamless textile fabrication. Moreover, our glove is clinician-guided and validated for unsupervised, at-home use in a hand-edema population, supporting participant-specific protocols that previous work’s uniform, lower-limb garments do not address.
Usability testing revealed high overall satisfaction but also highlighted variability linked to hand function. Three participants with reduced hand mobility (P1, P3, and P4) rated donning difficulty as the lowest possible rating (1/7), citing challenges with digit alignment. In response, iterative hardware adjustments were implemented, including a Velcro-based closure mechanism that improved glove entry and alignment. Nonetheless, caregiver assistance remained essential for donning and doffing. P3, who could not complete the BBT dexterity test, proposed a mittens-style configuration. These findings underscore the necessity of inclusive design strategies—such as wider wrist apertures, simplified closures, and one-handed donning support—to ensure accessibility for users with severe motor impairment. Conversely, four participants with greater mobility (P2, P5, P6, P7) reported easy donning, sustained comfort, and a high willingness to continue therapy. These findings emphasized the need for wider wrist apertures, simplified closures, and strategies that enable one-handed application to accommodate severe motor impairment and day-to-day fluctuations in swelling.
Portability and device reliability received the lowest median survey scores (5.0 and 6.0, respectively). These concerns were largely attributed to the exposed wiring of the current prototype, which routes 74 individual wires from 37 SMA actuators to a centralized PCB. Although encased in a textile sleeve, the visible cable bundle appeared fragile and cumbersome. Replacing discrete wiring with conductive yarns that are knitted, braided, or embroidered directly into the fabric and extended sleeves is therefore a priority for future iterations, aligning with broader efforts in seamless textile-electronic integration.
The home-based study demonstrated the feasibility of a device with programmable, anatomically targeted compression, which can be used outside a supervised setting. Participants completed unsupervised sessions, and logged data confirmed adherence to the prescribed schedule, indicating the potential for real-world practicality for users with limited access to in-person care. While this ensures initial personalization, it does not accommodate the temporal variability of swelling that is typical in lymphedema or inflammatory conditions. For example, P5 reported discomfort during afternoon sessions despite favorable experiences in the morning and evening, underscoring the limitations of fixed pressure levels. To address this, upcoming versions will integrate dynamic compression control, enabling users to tailor therapy in real-time with clinical oversight. A mobile interface will offer selectable compression waveforms—including single-point, dual-zone, triple-zone, and dynamic rhythmic patterns such as bottom-up clearing followed by full-hand drainage. These patterns emulate manual lymphatic drainage techniques and can be tailored to the type of edema, whether lymphatic or stroke-related. Additionally, users will be able to choose from varying session durations (e.g., 30, 45, or 60 min), further supporting self-regulation of therapy intensity and duration.
The EdemaFlex glove resulted in measurable improvements, including a hand-volume reduction of up to 25%, increases in range of motion of up to 50%, and enhancements in Box-and-Block test ranging from 8% to 150%, demonstrating its therapeutic potential for managing hand edema and restoring functional mobility. Ongoing work will expand the cohort to more participants, thereby strengthening statistical power. The fully integrated EdemaFlex platform, which combines textile-embedded actuation, clinician-guided digital fabrication, compact electronics, and a participant-facing mobile interface, offers a scalable approach to personalized home compression therapy. By demonstrating the potential for continuous edema management from clinic to daily life, the system lays the groundwork for adaptive self-care and future usage in settings where conventional therapeutic resources are scarce. In future iterations, the EdemaFlex platform could further support the management of hand edema and restoration of functional mobility, particularly among patients with limited voluntary movement at baseline.
Methods
Integrated fabrication and co-design workflow
The design tool is a custom web-based progressive application (PWA)53 that enables clinicians to create participant-specific full-hand therapeutic gloves through automated bitmap generation for knitting machine fabrication. The application runs locally on clinician workstations and provides a streamlined workflow for bitmap generation from participant hand measurements. The design process begins with parametric hand measurement input, where the software utilizes hand geometry to automatically generate an initial glove bitmap. Clinicians can then modify this generated bitmap using interactive control points overlaid on de-identified participant hand images, with real-time visual feedback on geometric adjustments. Subsequently, the tool enables placement of 37 SMA channels (30 digit-specific and 7 palm-specific) onto the glove bitmap, with clinicians having full control to reposition channels based on participant-specific requirements, such as joint conditions and injuries that participants might have. Upon completion of design modifications, the application generates downloadable machine-readable bitmap files optimized for computerized knitting machines, ensuring seamless integration with automated fabrication workflows. The application was implemented using React70 with JavaScript’s native Canvas API71 for high-performance bitmap rendering and manipulation, providing responsive design capabilities suitable for clinical environments.
The fabrication process is grounded in a clinician-researcher co-design workflow within the EdemaFlex system, ensuring that each stage of device development incorporates both clinical and researcher’s inputs. This collaborative approach supports the creation of participant-specific, ergonomically optimized, and therapeutically effective gloves. The workflow proceeds through the following key steps:
Step 1: Hand measurement data collection: Clinicians collect detailed hand measurements, including digit, palm, and wrist lengths and circumferences.
Step 2: Initial bitmap generation for the fitting session: The design tool generates bitmap glove files derived from participant hand measurements. The process allows for real-time discussion and adjustment, ensuring that both clinical fit and technical feasibility are considered from the outset. The resulting bitmap overlays the participant’s anatomical measurements onto a de-identified hand image, and the auto-generated bitmap can be immediately reviewed and downloaded for further processing.
Step 3: Knit programming and glove prototype: Researchers convert the collaboratively designed bitmap into stitch codes using Apex4’s KnitPaint and KnitDesign programs, defining loop structures for the SMA actuator channels. Prototype knit panels are fabricated using a Shima Seiki SRY123LP V-bed machine.
Step 4: Clinician-guided design adaptation (DA) session: In this dedicated co-design phase, clinicians review and refine actuator placement and the number of actuators, taking into account ergonomic factors and the presence of scars or sensitive areas. The design tool enables pixel-level adjustments, allowing the team to optimize the glove’s therapeutic efficacy and ergonomic comfort for each participant.
Step 5: Final knitting, assembly, and hardware integration: After integrating feedback from the adaptation session, researchers fabricated the final knit panels and assembled the glove. Following knitting, the SMA springs were manually inserted through pre-defined knit channels and secured with crimp connectors before electrical connection to the PCB. Therapy parameters (e.g., PWM settings) are established in consultation with clinicians, ensuring that compression delivery aligns with individual participant needs and safety guidelines.
Home-based feasibility study protocol
A total of seven participants were recruited through referrals from occupational therapists, physical therapists, rehabilitation physicians, and publicly posted study flyers. Inclusion criteria required participants to be ≥18 years old with a clinical diagnosis of hand edema, characterized by visible swelling. Participants were excluded if they demonstrated the absence of protective sensation, were assessed using standardized monofilament testing, had open wounds or active dermatological conditions on their hands, or were pregnant or breastfeeding.
To explore the feasibility, usability, and short-term functional responses of EdemaFlex at home, a structured three-day protocol was conducted under IRB-approved guidelines. This study was approved by the Biomedical Research Alliance of New York (BRANY) Institutional Review Board (Protocol #22-10025315) affiliated with Weill Cornell Medicine/NewYork-Presbyterian Hospital. Written informed consent for photography and publication of identifiable images and videos was obtained from all participants under the IRB-approved protocol. This study extends the evaluation to “Home-based study" usage, which is defined as participant self-administered, at-home deployment over multiple sessions. This approach captures usage contexts that are rarely observed in controlled lab environments.
Day 1: In-Lab Intervention (2.5 h; on-boarding, 30 min session, pre-/post-measurements): Participants first completed informed consent, demographic, and edema management surveys. This was followed by a 30 min onboarding session introducing the EdemaFlex glove. A clinician performed a physical examination, including protective sensation evaluation using standardized monofilament testing and assessment of muscle stiffness/spasticity using the modified Ashworth scale (MAS), ensuring participants’ suitability and safety for device usage. Next, participants underwent initial baseline measurements, including (1) volumetry test, (2) joint range of motion (ROM) at PIP and MCP joint flexion and extension for all digits using goniometry, (3) circumference measurement, (4) Figure-of-Eight measurement, and hand functional performance assessment through (5) Box and Block Test (BBT). Subsequently, participants completed a 30 min supervised intervention wearing the glove to familiarize themselves with the device in a supervised setting. Immediately following this 30 min intervention, all measurements were repeated at least two times and averaged. The combined pre- and post-intervention assessments took ~90 min. Finally, participants were then provided a take-home package containing the EdemaFlex glove, smartphone, response sheet, battery, and instructional manual, all compactly stored within a portable, headphone-sized carrying case.
Day 2: At-Home-Intervention (24 h; three sessions, 30 min each): Participants were instructed to independently perform at least three additional 30 min therapy sessions72 at home during Day 2, documenting session data and experiences.
Day 3: In-Lab Follow-up (1 h; survey and interview): Participants returned for a follow-up visit, completed a post-study Likert survey on usability and comfort, and engaged in a semi-structured interview to provide qualitative feedback.
The EdemaFlex glove’s performance in mobilizing edematous fluid was systematically assessed using quantitative measures based upon hand edema clinical measures55,58,59,60,61,62,63,64,65,73,74,75,76. Objective measurements were collected immediately before and after a standardized 30 min therapeutic session to evaluate acute therapeutic outcomes. To ensure accuracy, each test was conducted at least twice, and the average values were used in subsequent analyses.
Protective sensation assessment: Protective sensation was assessed using standardized Semmes–Weinstein monofilament testing to ensure participant safety and device suitability. Participants closed their eyes to eliminate visual bias. Testing began with the 2.83 (green) monofilament pressed perpendicularly against predetermined anatomical points until it bent into a “C” shape for approximately one second. If participants failed to perceive sensation, progressively thicker filaments were used. Participants demonstrating protective sensation with at least the 4.31 filament were considered eligible for participation73.
Muscle spasticity (modified Ashworth scale, MAS): Upper-extremity spasticity was evaluated objectively using the modified Ashworth scale (MAS), a validated tool for grading muscle tone74. Each participant relaxed their upper extremity while the clinician passively moved the elbow, wrist, and index digit through maximal flexion and extension over one second. Spasticity was graded from 0 (no increase in muscle tone) to 4 (affected area rigid in flexion or extension).
Volumetry (water displacement method): Hand edema volume was objectively quantified using volumetric assessment, the gold standard for edema evaluation75,76. Participants submerged their hands into a 3D-printed custom volumeter filled with water, stopping at an anatomical line drawn between the distal radial and ulnar styloid processes. Displaced water was measured by weight using a precision scale. Measurements were performed three times, with the mean value recorded for analysis.
Range of motion (ROM): Digital goniometry was employed to quantify the active range of motion of the proximal interphalangeal (PIP) and metacarpophalangeal (MCP) joints. Participants actively performed full flexion and extension of each joint. The goniometer was carefully aligned with joint axes to measure maximum flexion and extension angles. Measurements were repeated at least twice per joint, with averaged values recorded for comparative analyses.
Circumference measurement (Figure-of-Eight): Digit and hand circumferences were measured using the Figure-of-Eight technique, a reliable clinical method for quantifying localized swelling and edema distribution55,76. Measurement commenced at the radial styloid, proceeding along the volar wrist to the ulnar styloid, diagonally across the dorsal hand toward the second metacarpal head, wrapping around the palm and metacarpal heads, and returning to the starting point. Each measurement was repeated at least twice, and averages were calculated.
Hand function assessment (Box and Block Test, BBT): Functional hand dexterity and motor performance were assessed using the standardized Box and Block Test. Participants sat facing a partitioned box containing 150 small wooden blocks placed on one side. Following a brief 15 s trial, participants transferred as many blocks as possible, one at a time, from one compartment to the other using only the affected hand. Transfers were counted as valid only if the hand fully crossed the central partition. Each test lasted 60 s and was repeated twice, with the average number of blocks transferred documented for analysis.
Post-survey (7-point Likert scale): Participants completed structured questionnaires and interviews to evaluate subjective aspects of EdemaFlex, including device usability, software interface, knit comfort, and perceived therapeutic efficacy. Using a validated 7-point Likert scale (7 = most positive, 1 = most negative), they rated key experience domains such as ease of setup and use, comfort during wear, perceived therapeutic impact, portability, and feasibility for daily integration. Responses were collected immediately following the final session to minimize recall bias. Given the ordinal nature of Likert scale data, median values were reported to more accurately represent central tendency and reduce the influence of outliers, in line with best practices for ordinal-scale analysis.
Semi-structured interview: To gain deeper insight into user experiences, all participants engaged in 20–30 min audio-recorded semi-structured interviews. These interviews probed perceived benefits and limitations, comparisons with existing treatments, usability challenges, and design recommendations. Transcripts were analyzed using ATLAS.ti, a qualitative data analysis software, to code and extract thematic categories by three experienced researchers31,77,78. Quotations were selected to highlight representative feedback and inform design implications.
A Bluetooth-enabled smartphone application electronically logged real-time usage duration, enabling further quantitative analysis. This data was used as ground truth and analyzed alongside participant-provided response sheets for comprehensive evaluation.
Quantitative outcomes were assessed across multiple physiological and functional parameters, including hand volume (via water displacement), circumference (joint-specific tape measurements), dexterity (Box-and-Block test), range of motion (ROM), and the Figure-of-Eight test. Measurements were collected pre- and post-intervention, with each data point measured in duplicate or triplicate. Mean values and standard deviations were calculated for each participant. Paired t-tests were used to assess the significance of within-subject changes (e.g., volume reduction), with a significance threshold set at p < 0.05. Additionally, group-level paired t-tests were conducted by pooling participant data to evaluate the overall impact of EdemaFlex across the cohort. All statistical analyses were performed using JASP and standard statistical software to ensure reproducibility and validity.
Contact pressure and PWM modeling
To estimate the contact pressure (CP) applied to the skin, we adapted Laplace’s law:
where
CP is the contact pressure (Pa)
T is the tensile force per unit length (N/m)
r is the radius of the curvature (m)
Although Laplace’s law originates in fluid mechanics, prior studies in smart and biomedical textiles58,79,80 have successfully adapted this principle to estimate contact pressures. To link tensile force to material deformation, Hooke’s law was applied:
where
E is the elastic modulus (MPa)
t is the fabric thickness (mm)
ε is the circumferential strain (unitless)
Combining these two equations yielded a formula 1 for predicting contact pressure based on glove circumference:
where
E is the elastic modulus (0.16 MPa)
t is the fabric thickness (2.04 mm)
C is the circumference of the glove (digit: 60 mm, palm: 180 mm)
To deliver the target strain levels, the PWM duty cycle of the SMA drivers (12-bit resolution, 0–7.4 V output) was tuned using the formula 2:
where
x is the corresponding PWM register value
Data availability
Data will be made available upon reasonable request.
Code availability
Code will be made available upon reasonable request.
References
O’Neill, C. & Harris, R. Lymphoedema and chronic swelling. In Lower Limb and Leg Ulcer Assessment and Management 1st edn (eds Mitchell, A., Ritchie, G. & Hopkins, A.).
Boomkamp-Koppen, H. G., Visser-Meily, J. M., Post, M. W. & Prevo, A. J. Poststroke hand swelling and oedema: prevalence and relationship with impairment and disability. Clin. Rehabil. 19, 552–559 (2005).
Fu, M. R. Breast cancer-related lymphedema: symptoms, diagnosis, risk reduction, and management. World J. Clin. Oncol. 5, 241 (2014).
Morrell, R. M. et al. Breast cancer-related lymphedema. Mayo Clin. Proc. 80, 1480–1484 (2005).
Schreier, A. C. The nurse-midwifery management of physiological edema in pregnancy. J. Nurse-Midwifery 21, 18–22 (1976).
Kumar, S. Complications of Lower Limb Edema 91–104 (Springer, 2022).
Grainger, A. J. Arthritis 233–262 (Springer, 2013).
Friedman, R. et al. Fluid distribution patterns in early-stage upper extremity lymphedema. Ann. Plast. Surg. 90, S622–S625 (2023).
Chen, K., Duan, G. Y., Wolf, J. M. & Stepan, J. G. Health disparities in hand and upper extremity surgery: a scoping review. J. Hand Surg. 48, 1128–1138 (2023).
Gibson, L. et al. Global knowledge gaps in equitable delivery of chronic edema care: a political economy case study analysis. Lymphat. Res. Biol. 19, 447–459 (2021).
Boiselle Howard, S. & Krishnagiri, S. The use of manual edema mobilization for the reduction of persistent edema in the upper limb. J. Hand Ther. 14, 291–301 (2001).
Donahue, P. M. C., MacKenzie, A., Filipovic, A. & Koelmeyer, L. Advances in the prevention and treatment of breast cancer-related lymphedema. Breast Cancer Res. Treat. 200, 1–14 (2023).
Garnier, B. et al. A novel functional electrical stimulation sleeve based on textile-embedded dry electrodes. BioMed. Eng. OnLine 23, 51 (2024).
Lee, S. et al. Autonomous multi-joint soft exosuit for assistance with walking overground. In 2018 IEEE International Conference on Robotics and Automation (ICRA), (ed. Corke, P.), 2812–2819 (IEEE, 2018).
Panizzolo, F. A. et al. Lower limb biomechanical analysis during an unanticipated step on a bump reveals specific adaptations of walking on uneven terrains. J. Exp. Biol. 220, 4169–4176 (2017).
Du Pasquier, C. et al. Haptiknit: distributed stiffness knitting for wearable haptics. Sci. Robot. 9, eado3887 (2024).
Shtarbanov, A., Zhu, M., Colonnese, N. & Hajiagha Memar, A. Sleeveio: modular and reconfigurable platform for multimodal wearable haptic feedback interactions. In Proc. 36th Annual ACM Symposium on User Interface Software and Technology, UIST ’23, (eds Steimle, J. & Riche, N. H.), (Association for Computing Machinery, 2023).
Suarez, E. et al. A soft pneumatic fabric-polymer actuator for wearable biomedical devices: proof of concept for lymphedema treatment. In 2018 IEEE International Conference on Robotics and Automation (ICRA), (ed. P. Corke) 5452–5458 (IEEE, 2018).
Payne, C. J. et al. An implantable extracardiac soft robotic device for the failing heart: mechanical coupling and synchronization. Soft Robot. 4, 241–250 (2017).
Kilic Afsar, O. et al. Omnifiber: Integrated fluidic fiber actuators for weaving movement based interactions into the ‘fabric of everyday life’. In The 34th Annual ACM Symposium on User Interface Software and Technology 1010–1026 (2021).
Zhu, M. et al. Pneusleeve: In-fabric multimodal actuation and sensing in a soft, compact, and expressive haptic sleeve. In Proc. 2020 CHI Conference on Human Factors in Computing Systems 1–12 (2020).
Zuo, K., Zhang, Y., Liu, K., Li, J. & Wang, Y. Design and experimental study of a flexible finger rehabilitation robot driven by shape memory alloy. Meas. Sci. Technol. 34, 084004 (2023).
Qiu, Y., Zhang, E., Plamthottam, R. & Pei, Q. Dielectric elastomer artificial muscle: materials innovations and device explorations. Acc. Chem. Res. 52, 316–325 (2019).
Aktas Eken, G. & Acar, M. H. Polysulfone-based shape memory thermoplastics with body temperature triggering. Macro Chem. Phys. 219, 1800227 (2018).
Forman, J. et al. FibeRobo: fabricating 4D fiber interfaces by continuous drawing of temperature tunable liquid crystal elastomers. In Proc. 36th Annual ACM Symposium on User Interface Software and Technology 1–17 (ACM, 2023).
Buckner, T. L. & Kramer-Bottiglio, R. Functional fibers for robotic fabrics. Multifunct. Mater. 1, 012001 (2018).
Granberry, R. et al. Dynamic, tunable, and conformal wearable compression using active textiles. Adv. Mater. Technol. 7, 2200467 (2022).
Jani, J. M., Leary, M., Subic, A. & Gibson, M. A. A review of shape memory alloy research, applications and opportunities. Mater. Des. (1980–2015) 56, 1078–1113 (2014). .
Kim, J. H. H., Huang, K., White, S., Conroy, M. & Kao, C. H.-L. KnitDermis: fabricating tactile on-body interfaces through machine knitting. In Designing Interactive Systems Conference 2021, 1183–1200 (ACM, Virtual Event USA, 2021).
Ku, P.-S., Huang, K. & Kao, C. H.-L. Patch-O: Deformable Woven Patches for On-body Actuation. In CHI Conference on Human Factors in Computing Systems (eds Barbosa, S. et al.), 1–12 (ACM, 2022).
Chernyshov, G. et al. Shape memory alloy wire actuators for soft, wearable haptic devices. In Proc. 2018 ACM International Symposium On Wearable Computers 112–119 (2018).
Haynes, A. C. & Steimle, J. Flextiles: Designing customisable shape-change in textiles with SMA-actuated smocking patterns. In Proc. 2024 CHI Conference on Human Factors in Computing Systems, (eds Mueller, F. F. & Kyburz, P.) 1–17 (2024).
Kim, H. J. H., Pourjafarian, N., Choudhury, A., Stilling, J. & Kao, C. H.-L. MediKnit: soft medical making for personalized and clinician-designed wearable devices for hand edema (ed. L. Mamykina) In Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 8, 1–30 (2024).
Kim, J. H. H., Stilling, J., O’Dell, M. & Kao, C. H.-L. KnitDema: robotic textile as personalized edema mobilization device. In Proc. 2023 CHI Conference on Human Factors in Computing Systems 1–19 (ACM, 2023).
Liu, Q., Ghodrat, S., Huisman, G. & Jansen, K. M. Shape memory alloy actuators for haptic wearables: a review. Mater. Des. 233, 112264 (2023).
Muthukumarana, S., Elvitigala, D. S., Forero Cortes, J. P., Matthies, D. J. & Nanayakkara, S. Touch me gently: recreating the perception of touch using a shape-memory alloy matrix. In Proc. 2020 CHI Conference on Human Factors in Computing Systems 1–12 (2020).
Muthukumarana, S. et al. Clothtiles: a prototyping platform to fabricate customized actuators on clothing using 3d printing and shape-memory alloys. In Proc. 2021 CHI Conference on Human Factors in Computing Systems 1–12 (2021).
Ahmed, U., Hussain, T. & Abid, S. Role of knitted techniques in recent developments of biomedical applications: a review. J. Eng. Fibers Fabr. 18, 15589250231180293 (2023).
Albaugh, L., Hudson, S. & Yao, L. Digital fabrication of soft actuated objects by machine knitting. In Proc. 2019 CHI Conference on Human Factors in Computing Systems 1–13 (ACM, 2019).
Albaugh, L., McCann, J., Hudson, S. E. & Yao, L. Engineering multifunctional spacer fabrics through machine knitting. In Proc. 2021 CHI Conference on Human Factors in Computing Systems 1–12 (ACM, 2021).
Gupta, U. et al. All knitted and integrated soft wearable of high stretchability and sensitivity for continuous monitoring of human joint motion. Adv. Healthc. Mater. 12, 2202987 (2023).
Jiang, M. et al. Three-directional spacer-knitted piezoresistant strain and pressure sensor for electronic integration and on-body applications. ACS Appl. Mater. Interfaces 15, 55009–55021 (2023).
Jones, L., Grip, G. & Nabil, S. Wear your heart on your sleeve: using digital knitting machines to craft wearable biodata portraits. In Proc. 2023 ACM Designing Interactive Systems Conference 547–563 (2023).
Luo, Y., Wu, K., Palacios, T. & Matusik, W. KnitUI: fabricating interactive and sensing textiles with machine knitting. In Proc. 2021 CHI Conference on Human Factors in Computing Systems 1–12 (ACM, 2021).
Luo, Y. et al. MagKnitic: machine-knitted passive and interactive haptic textiles with integrated binary sensing. In Proc. 36th Annual ACM Symposium on User Interface Software and Technology, (ed. Follmer, S.), 1–13 (ACM, 2023).
Ou, J., Oran, D., Haddad, D. D., Paradiso, J. & Ishii, H. SensorKnit: architecting textile sensors with machine knitting. 3D Print. Additive Manuf. 6, 1–11 (2019).
Wang, T. et al. Luxknit: fabricating interactive display textiles integrated with sensing by machine knitting. In Proc. 2025 CHI Conference on Human Factors in Computing Systems 1–12 (2025).
Wei, R. et al. Revolutionizing wearable technology: advanced fabrication techniques for body-conformable electronics. npj Flex. Electron. 8, 1–20 (2024).
Wicaksono, I. et al. 3DKnITS: three-dimensional digital knitting of intelligent textile sensor for activity recognition and biomechanical monitoring. In 2022 44th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC) 2403–2409 (IEEE, 2022).
Yu, T. C., Arakawa, R., McCann, J. & Goel, M. Uknit: a position-aware reconfigurable machine-knitted wearable for gestural interaction and passive sensing using electrical impedance tomography. In Proc. 2023 CHI Conference on Human Factors in Computing Systems (ed. A. Schmidt), 1–17, (2023).
Hofmann, M. et al. Occupational therapy is making: clinical rapid prototyping and digital fabrication. In Proc. 2019 CHI Conference on Human Factors in Computing Systems (ed. Brewster, S.), 1–13 (ACM, 2019).
Solari, E., Marcozzi, C., Negrini, D. & Moriondo, A. Lymphatic vessels and their surroundings: how local physical factors affect lymph flow. Biology 9, 463 (2020).
Osmani, A. Progressive web apps: Escaping tabs without losing our soul. https://developers.google.com/web/progressive-web-apps/ (2017). Google Developers.
W3C Community Group. Web bluetooth api specification. World Wide Web Consortium (W3C) https://webbluetoothcg.github.io/web-bluetooth/ (2019).
Cowan, A. C. & Stegink-Jansen, C. W. Rehabilitation of hand burn injuries: current updates. Injury 44, 391–396 (2013).
Geng, Y. et al. A skin-inspired self-adaptive system for temperature control during dynamic wound healing. Nano-Micro Lett. 16, 152 (2024).
Martin, N. & Falder, S. A review of the evidence for threshold of burn injury. Burns 43, 1624–1639 (2017).
Chu, C.-Y. & Patterson, R. M. Soft robotic devices for hand rehabilitation and assistance: a narrative review. J. Neuroeng. Rehabil. 15, 1–14 (2018).
Hidding, J. T. et al. Accuracy of a single measurement site for self-monitoring of patients with breast cancer at risk for lymphedema. Physiother. Theory Pract. (2019).
Macionis, V. Reliability of the standard goniometry and diagrammatic recording of finger joint angles: a comparative study with healthy subjects and non-professional raters. BMC Musculoskelet. Disord 14, 17 (2013).
Reissner, L. et al. Minimal detectable difference of the finger and wrist range of motion: comparison of goniometry and 3d motion analysis. J. Orthop. Surg. Res. 14, 1–10 (2019).
Han, S. W. & Lee, M.-S. The effect of fluidotherapy on hand dexterity and activities of daily living in patients with edema on stroke. J. Phys. Ther. Sci. 29, 2180–2183 (2017).
Chen, H.-M., Chen, C. C., Hsueh, I.-P., Huang, S.-L. & Hsieh, C.-L. Test-retest reproducibility and smallest real difference of 5 hand function tests in patients with stroke. Neurorehabil. Neural Repair 23, 435–440 (2009).
Lang, C. E., Edwards, D. F., Birkenmeier, R. L. & Dromerick, A. W. Estimating minimal clinically important differences of upper-extremity measures early after stroke. Arch. Phys. Med. Rehabil. 89, 1693–1700 (2008).
Sakai, R. et al. Development of a finger extension assistance splint for a hemiplegic upper limb after stroke—a case report. Asian J. Occup. Ther. 16, 83–86 (2020).
Gemperle, F., Kasabach, C., Stivoric, J., Bauer, M. & Martin, R. Design for wearability. In Proc. ISWC’98 116–122 (1998).
Knight, J. F., Baber, C., Schwirtz, A. & Bristow, H. W. The comfort assessment of wearable computers. In Proc. ISWC’02 (ed. Horrocks, l.) 65–72 (2002).
Liu, X., Vega, K., Maes, P. & Paradiso, J. A. Wearability factors for skin interfaces. In Proc. AH'16 (ed. Seigneur, J.-M.) Vol. 21, 1–21:8 (2016).
Zeagler, C. Where to wear it: functional, technical, and social considerations in on-body location for wearable technology 20 years of designing for wearability. In Proc. ISWC’17 150–157 (2017).
React Team. React 18 Documentation (React Team, 2022).
Mozilla Developer Network. Canvas API Documentation (Mozilla Developer Network, 2023).
Griffin, J. W., Newsome, L. S., Stralka, S. W. & Wright, P. E. Reduction of chronic posttraumatic hand edema: a comparison of high voltage pulsed current, intermittent pneumatic compression, and placebo treatments. Phys. Ther. 70, 279–86 (1990).
Bell Krotoski, J. A. Flexor tendon and peripheral nerve repair. Hand Surg. 7, 83–100 (2002).
Bongi, S. M., Del Rosso, A., Passalacqua, M., Miccio, S. & Cerinic, M. M. Manual lymph drainage improving upper extremity edema and hand function in patients with systemic sclerosis in edematous phase. Arthritis Care Res. 63, 1134–1141 (2011).
Devrimsel, G., Turkyilmaz, A. K., Yildirim, M. & Beyazal, M. S. The effects of whirlpool bath and neuromuscular electrical stimulation on complex regional pain syndrome. J. Phys. Ther. Sci. 27, 27–30 (2015).
Fayez, E. S. & Eldeen, H. E. Neuromuscular electrical stimulation versus intermittent pneumatic compression on hand edema in stroke patients. Indian J. Physiother. Occup. Ther. 7, 81 (2013).
Bowman, R., Nadal, C., Morrissey, K., Thieme, A. & Doherty, G. Using thematic analysis in healthcare HCI at chi: a scoping review. In Proc. 2023 CHI Conference on Human Factors in Computing Systems 1–18 (2023).
Braun, V. & Clarke, V. Thematic Analysis (American Psychological Association, 2012).
Li, B. M. et al. Influence of armband form factors on wearable ECG monitoring performance. IEEE Sens. J. 21, 11046–11060 (2021).
Youn, S. et al. Simulation-based contact pressure prediction model to optimize health monitoring using e-textile integrated garment. IEEE Sens. J. 23, 18316–18324 (2023).
Sharper Image. Total Hand Compression Massager https://www.sharperimage.com/view/product/Total%2BHand%2BCompression%2BMassager%2Bby%2BSharper%2BImage/209821 (2025).
Copper Compression. Coppervibe Vibration & Heat Therapy Gloves https://coppercompression.com/collections/hands/products/coppervibe-vibration-heat-therapy-gloves (2025).
Encompass Health. Bioness h200 Wireless Hand Rehabilitation System https://www.encompasshealth.com/inpatient-rehabilitation/technology/bioness-h200 (2025).
Tactile Medical. Nimbl for Upper Body https://tactilemedical.com/our-lymphedema-solutions/for-the-upper-body/nimbl-for-upper-body/ (2025).
Koya Medical. Dayspring for Lymphedema https://www.koyamedical.com/healthcare-professionals/lymphedema/dayspring (2025).
Acknowledgements
This project was supported in part by the Cornell Multi-Investigator Seed Grant 3223364 and the Pinetops Foundation. We acknowledge Amy Zhang for assistance with textile assembly, Ashwin Rajarajan for effort on a previous version of the software, Alicia Chu for assistance with software and its documentation, Heather Kim for effort on an early iteration of the knit substrate, and Jacob Revelo for a prior design attempt of the printed circuit board.
Author information
Authors and Affiliations
Contributions
H.-L.C.K. conceived of the research and designed the platform. S.Y. led the platform implementation. S.Y. and H.-L.C.K. designed the knit textile substrate. S.Y. and M.T. implemented the knit textile substrate. P.-S.K. and W.F. implemented the hardware. A.C. implemented the software. S.Y. and H.-L.C.K. designed the functional performance evaluations. S.Y., W.F., P.-S.K., A.C., and M.T. conducted the functional performance evaluations. S.Y., W.F., P.-S.K., and H.-L.C.K. organized the functional performance evaluation results. H.-L.C.K., J.S., and S.Y. designed the user study protocol. J.S., M.D., A.P., S.Y., H.-L.C.K. recruited participants. S.Y., J.S., M.D., and A.P. acquired user study data. S.Y., H.-L.K., J.S., A.P., and M.D. analyzed and interpreted the user study data. S.Y., H.-L.C.K., and J.S. organized the user study results. S.Y. and H.-L.C.K. led the manuscript writing. S.Y. wrote the first draft, with assistance from P.-S.K., W.F., and A.C. M.T. helped S.Y. with manuscript figures. M.T. produced the supplementary video. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Youn, S., Choudhury, A., Ku, PS. et al. EdemaFlex: textile-based soft-robotic platform toward personalized hand edema therapy. npj Flex Electron 10, 48 (2026). https://doi.org/10.1038/s41528-025-00504-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41528-025-00504-6
