
Abstract
The global marine gravity anomalies are primarily recovered from geoid gradients in the along-track directions obtained through satellite altimetry. However, the accuracy of the gravity model is significantly constrained by the sparse geoid gradients in the cross-track directions. To overcome the scarcity of cross-track geoid gradients, we employ a mean sea surface model to calculate geoid gradients in multiple directions, thereby recovering marine gravity anomalies. A global marine gravity anomaly model with 1-arcmin grid was determined from an optimized mean sea surface model. The accuracy of this gravity anomaly model was assessed by shipborne gravity and released marine gravity anomaly models. By the combination of geoid gradients in multiple directions, the meridian components and the prime vertical components of deflections of the vertical achieved consistent accuracy. The accuracy of the gravity anomaly model is 4.31 mGal, derived from shipborne gravity anomalies. Furthermore, the accuracy of this model has been validated across various regions, encompassing different latitudes, bathymetry, and distances from the coastline. The new gravity anomaly model slightly outperforms the released model.
Similar content being viewed by others

Background & Summary
Marine gravity data is widely applied in the fields of marine geodesy and physical oceanography. With advancements in satellite altimetry technology, satellite altimeter data has become the primary data source for recovering marine gravity anomalis1,2,3,4,5,6. Currently, satellite altimetry provides a substantial amount of sea surface height observations, which contain rich geoid height information7,8,9. These observations have significantly contributed to determine marine gravity anomalies10,11,12,13, mean sea surface14,15,16, seafloor topography17,18, ocean lithosphere19, and ocean circulation20,21.
Since the 1970s, the development of altimetry missions has facilitated the recovery of marine gravity anomaly model from altimeter data. Currently, the method of recovering marine gravity anomalies is quite stable, including the Laplace equation22 and the inverse Vening-Meinesz (IVM) formula23 based on deflections of the vertical (DOVs), the inverse Stokes formula based on sea surface heights24, and the least squares collocation25. With the abundance of altimeter data and advancements in data processing methods, both series of global marine gravity anomaly models are continuously being constructed and release26,27. Notably, one series is the Sandwell and Smith (S&S) models developed by the Scripps Institution of Oceanography (SIO) in the United States, while the other series is the KMS-DNSC-DTU models developed by the Technical University of Denmark (DTU). However, neither of these series models has yet incorporated altimeter data from HaiYang-2A (HY-2A) satellite. HY-2A altimeter data provides reliable measurements through the analysis of the sea surface heights crossover discrepancies and the recovered gravity anomalies from single altimeter data28,29,30. Currently, there are few studies that directly use mean sea surface models to recover marine gravity anomalies.
The Mean Sea Surface (MSS) model established from multi-satellite altimeter data is a vital model in geodesy and physical oceanography31,32. In geodesy, it serves as a reference geoid for national height systems, and in oceanography, it serves as a reference surface for vertical measurements in the ocean. It is also widely used in the study of ocean circulation, detection of mesoscale eddies, analysis of sea surface height variations, determination of the undulation of the geoid, and detection of crustal deformations33. With the development of altimetry missions, it is now possible to obtain a significant amount of sea surface height observations. This enables the establishment of a high-accuracy, high-resolution MSS model using multi-satellite satellite altimeter data. An optimized MSS model, SDSUT2020MSS, has been established using a 19-year moving average method and fused multi-satellite altimeter data over a 27-year period (from January 1993 to December 2019), particularly incorporating the HY-2A altimeter data.
We utilize the SDUST2020MSS to determine a global marine gravity anomaly model using the IVM formula. The accuracy of the determined marine gravity anomaly model is assessed by shipborne gravity measurement and released marine gravity anomaly models.
Methods
The gridded DOV components are firstly determined from the mean sea surface model. The gridded geoid heights are obtained by subtracting the mean dynamic topography model from the MSS model. Because the grid size of MSS is 1′ × 1′, the mean dynamic topography model with a grid of 7.5′ × 7.5′ is interpolated to match the 1′ × 1′ grid of MSS by the cubic spline interpolation. Based on the remove-restore method, the residual geoid heights can be obtained as
where \({N}_{res}\) is the residual geoid heights, \(MSS\) is the mean sea surface model, \(MDT\) is the mean dynamic topography model, \({N}_{ref}\) is the reference geoid model.
The first-order difference of MSS can be used to calculate the geoid gradient, and then the gridded DOV components can be calculated31.
where \({e}_{res,PQ}\) is the residual geoid gradient between two points \(P\) and \(Q\), \({N}_{res,Q}\) or \({N}_{res,P}\) is the residual geoid height of the grid point \(Q\) or P, and \({d}_{PQ}\) is the spherical distance between \(P\) and \(Q\).
The relationship between the residual geoid gradient with an azimuth and the residual DOV components is
where \({\xi }_{res,P}\) represents the meridian component of the DOV and \({\eta }_{res,P}\) represents the prime vertical component of the DOV, and \({a}_{PQ}\) is the coordinate azimuth between the two points \(P\) and \(Q\).
The meridian component and the prime vertical component of the residual DOV are calculated by using geoid gradients in multiple directions derived from the mean sea surface model (as shown in Fig. 1), and the relationship is
where \({e}_{res,(N-n,n)}\) is the residual geoid gradient between two points with serial numbers \(N-n\) and \(n\), \({\xi }_{res,A}\) is the meridian component of the residual DOV of grid point, \({\eta }_{res,A}\) is the prime vertical component of the residual DOV of grid point, and \({a}_{N-n,n}\) is the coordinate azimuth between two points with serial numbers \(N-n\) and \(n\).

Calculation diagram of the residual gridded DOVs at the grid point based on multi-point calculation.
The unknown parameters of DOV components are solved using weighted least squares estimation, as
where V is the observation error matrix, B is the coefficient matrix composed of \(\cos \,{\alpha }_{i}\) and \(\sin \,{\alpha }_{i}\), \({\bf{L}}\) is the residual geoid gradient vector: \({\bf{L}}={({e}_{res,(N-1,1)},{e}_{res,(N-2,2)},{e}_{res,(N-3,3)}\cdots ,{e}_{res,(N-i,i)}\cdots ,{e}_{res,\left(\frac{N+1}{2},,,\frac{N+1}{2}\right)})}_{1\times \frac{N-1}{2}}^{{\rm{T}}}\), \({\bf{X}}\) is the residual DOV components vector: \({\bf{X}}={({\xi }_{res,A}{\eta }_{res,A})}^{T}\), \({\bf{P}}\) is the weight matrix based on the inverse distance weighting method.
The global marine gravity anomaly model is recovered from DOV components by IVM. The calculation of the residual gravity anomaly \(\Delta {g}_{res}\) from gridded DOV components by the IVM formula34,35 is
where, \({\rm{A}}\) is the fixed point, \(Q\) is the flowing point, and \({\gamma }_{0}=\frac{GM}{{R}^{2}}\) represents the normal gravity at point \({\rm{A}}\) (where \(GM\) is the Earth’s gravitational constant, and \({\rm{R}}\) is the average radius of the Earth). The meridian and prime vertical components of the residual DOV at the flowing point \(Q\) are denoted by \({\xi }_{{{\rm{res}}}_{{\rm{Q}}}}\) and \({\eta }_{{{\rm{res}}}_{{\rm{Q}}}}\), respectively. The azimuth angle from point \(Q\) to point \(A\) is \({a}_{{\rm{QA}}}\). \({H}^{\text{'}}({\psi }_{{\rm{AQ}}})\) is a kernel function depending on spherical distance \({\psi }_{{\rm{AQ}}}\).
Finally, the final marine gravity anomaly can be obtained by adding the reference gravity. In addition, we also added the innermost-zone effect on the gravity anomaly around the neighborhood of the computational points, where the kernel function is singular. The final gravity anomaly \(\Delta {g}_{M}\) is obtained by
where \(\Delta {g}_{{\rm{res}}}\) is the residual gravity anomalies derived from Eq. (7), \(\Delta {g}_{inzone}\) is the gravity anomalies in the innermost zone through \(\Delta {g}_{inzone}=\frac{1}{2}\sqrt{\frac{\Delta x\Delta y}{\pi }}{\gamma }_{0}({\xi }_{x}+{\eta }_{y})\), \(\Delta {g}_{ref}\) is the gravity anomalies obtained from reference field.
The specific process of inversion of gravity anomalies using the above method is shown in Fig. 2.

Flow chart of global marine gravity anomaly model recovered from mean sea surface model.
The three models used in the recovery of this new gravity anomaly model are as follows:
The Mean Sea Surface SDUST2020MSS model covers the latitude range of 80°S–84°N with a grid resolution of 1′ × 1′. The model was established using multi-satellite altimeter data from 1993 to 2019, approximately 26 years of observational data. Among the various data sources, altimeter data from HY-2A, Jason-3, and Sentinel-3A satellites were employed for the initial development of a high-accuracy, high-resolution global mean sea surface model36. The accuracy of SDSUT2020MSS reaches the decimeter level in coastal regions according to the assessment of GPS-level tide gauges. Moreover, the standard deviation of sea level anomaly derived from SDUST2020MSS is less than 1 cm by comparison with altimeter data. These assessments confirm that the SDUST2020MSS is slightly superior to the released MSS of the same period. The grid of SDUST2020MSS is available at https://zenodo.org/record/6555990.
The Mean dynamic topography model DTU22MDT with a grid resolution of 7.5′ × 7.5′ is released by the Technical University of Denmark (DTU). It is derived from the combination of the mean sea surface model DTU21MSS, the XGM2019e geoid model, and the mean currents. DTU21MSS is computed using multi-satellite altimeter data and represents the average value over a 20-year period (1993–2012). The new combined mean dynamic topography model, DTU22MDT, is selected due to optimized processing strategies, and its focus on improving accuracy in coastal regions. The DTU22MDT model is available at https://ftp.space.dtu.dk/pub/DTU22/MDT/37.
The Combined global gravity field model XGM2019e is selected as the reference gravity field for the remove-restore method. The reference gravity anomaly model on the 1′ × 1′ grid is calculated from the XGM2019e complete to degree and order 2160, which is available on the ICGEM (International Center for Global Earth Models) website. The XGM2019e model is a composite global gravity field model that incorporates data from the GOCO06s gravity field model and ground-based gravity grid data compiled by NGA. The gravity anomaly model of XGM2019e up to d/o 2160 is available at http://icgem.gfz-potsdam.de/calcgrid. Although the model is represented by spherical harmonic up to d/o 5399, those high-degree gravity signals beyond 2160 might be significantly affected by noise over the ocean. This is because the gravity field over the ocean is primarily derived from satellite altimetry38.
Data Records
The global marine gravity anomaly model is provided on a grid of 1′ × 1′ in the T/P reference ellipsoid39. The gridded product is available in Figshare as the netCDF file with three variables: lat, lon, and gra. Lat and lon are latitudes and longitudes vectors with a dimension of 9840 × 1 and 21600 × 1, respectively. The gra represents the free-air marine gravity anomalies in terms of mGal with a dimension of 9840 × 21600. In addition, the global marine deflections of the vertical are also provided as a separate netCDF file with three variables: lat, lon, dov_ns, dov_ew. The dimensions of variables are the same as gravity anomalies in the netCDF file. The dov_ns and dov_ew represent the meridian component and prime vertical component of DOV, respectively. The unit of DOVs is microradian (urad). Both netCDF files are available at https://doi.org/10.6084/m9.figshare.2696986939.
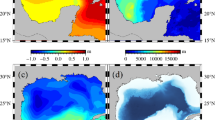
The final recovered global marine gravity anomaly model (Shandong University of Science and Technology Gravity Anomalies from Mean Sea Surface, SDUST2023GRA_MSS) is shown in Fig. 3 The DOV components of the intermediate grid products for the recovery of gravity anomalies are shown in Fig. 4.

SDUST2023GRA_MSS Global marine gravity anomaly model (free-air).

Global marine DOV components derived from mean sea surface model: top (a) meridian component, bottom (b) prime vertical component.
Technical Validation
The SDUST2023GRA_MSS was evaluated against shipborne gravity measurements and released global gravity anomaly models:
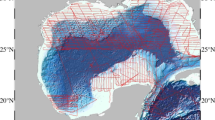
Shipborne gravity measurements are available on the National Centers for Environmental Information (NCEI, https://www.ncei.noaa.gov/maps/trackline-geophysics) of the National Oceanic and Atmospheric Administration (NOAA) in the United States. Considering the impact of navigation accuracy on gravity measurements, we only used shipborne gravity measurements after the 1990s for evaluation. Because the shipborne gravity data is collected from different agencies, the reference datum might be different. If the long-wavelength error exists in shipborne gravity, there will be a systematic bias in the difference between the recovered model and shipborne gravity measurements. Consequently, outliers of measurements from each cruise are removed by exceeding 3 times the standard deviations. System biases caused by gravimeter drift were corrected using a quadratic polynomial34,35. After data editing, the remaining shipborne gravity anomalies are 6 025 014 points, and the distribution of shipborne gravity is shown in Fig. 5.

Global regional division and Ship-borne gravity data distribution (red lines represent the ship tracks and blue lines represent subregions).
The global gravity anomaly models include SIO V32.1 and DTU17. The SIO V32.1 model is a marine gravity anomaly model released by the Scripps Institution of Oceanography (SIO) at the University of California, San Diego. The SIO V32.1 is available at https://topex.ucsd.edu/pub/global_grav_1min. The DTU17 model is a marine gravity anomaly model published by the Technical University of Denmark (DTU). The DTU17 is available at https://ftp.space.dtu.dk/pub/DTU17. The grid of both models is 1′ × 1′, and the accuracy of the assessment by shipborne gravity is 3–5 mGal.
DOV components validation
For the determination of DOV components using LSC, the calculation radius is an important parameter. The calculation radius is too large or too small, which will affect the accuracy of the recovered marine gravity anomaly model. To determine an optimal calculation radius, the accuracy of gravity anomaly model in the Philippine Sea (120–150 E, 0–35 N) is assessed by shipborne gravity anomalies, as shown in Table 1 and Fig. 6. The calculation radius of \(2\sqrt{2}\) arcminute is selected as the calculation window for recovering global marine DOV and gravity anomaly model.

Accuracy evaluation of recovered gravity anomalies with different calculation radius.
To validate the accuracy of the DOV components model, Table 2 presents statistics on the difference between marine DOVs model SDUST2023DOV and SIO V32.1. The root mean square (RMS) of the meridian component is 2.60µrad and the prime vertical component is 2.87 urad, respectively. The accuracy of the prime vertical component is consistent with the meridian component of SDUST2023DOV. This is because the geoid gradients in multi-directions derived from MSS are used to determine DOV components, rather than solely along-track geoid gradients. Due to the lack of in situ marine DOV measurements, it is difficult to verify the precision of determined DOV components from MSS in detail.
Recovered global marine gravity anomalies validation
Statistics on the difference between global marine gravity anomaly models SDUST2023GRA_MSS, SIO V32.1, DTU17 and the shipborne gravity anomalies is listed in Table 3. Three sub-regions were selected, including coastal areas A (120°–140°, 0°–40°N) located in the Philippines Sea and surrounding seas of Japan, Area B (210°–270°, 0–30°S) located in the East Pacific Ocean, and Area C (150°–180°, 60°–80°S) located in the high latitudes regions.
In area A, the RMS of the difference between SDUST2023GRA_MSS and shipborne gravity data is 4.92mGal, and its accuracy is generally consistent with other two marine gravity anomaly models. This is mainly because the quality of altimeter data in coastal is affected by the land signal, and the accuracy of MSS model in coastal is also decreased with altimeter data. In areas B and C, the accuracy of SDUST2023GRA_MSS is slightly better than that of SIOV32.1 and DTU17 models. This benefit from the SDUST2020MSS, established by adding three satellite altimetry data, especially HY-2A geodetic mission data. Figure 7 shows the histogram distributions of the differences. Statistical analysis reveals that the percentages of differences for SDUST2023GRA_MSS, SIO V32.1 and DTU17 within the range of ±20 mGal are 99.71%, 99.58% and 99.60%, respectively. The percentages of differences exceeding ±20 mGal for SDUST2023GRA_MSS, SIO V32.1 and DTU17 compared to the shipborne gravity data are 0.29%, 0.42% and 0.40%, respectively. It can be seen that the distribution of the difference between these models and NCEI ship-borne gravity data is relatively concentrated, which can well reflect the abnormal information of marine gravity.

Histogram of differences between marine gravity anomaly models and shipborne gravity data (mGal): (a) SDUST2023GRA_MSS-NCEI; (b) SIO V32.1-NCEI; (c) DTU17-NCEI.
Marine gravity anomalies validation in different regions
Statistics on the difference between three marine gravity anomaly models at different latitudes and the ship-borne gravity data are listed in Table 4. The RMSs of the differences between the three models and the shipborne gravity are between 3 and 4 mGal in the 60°S~60°N region. In the high latitude region, the RMSs are between 4 and 7 mGal. Three models show good consistency in the middle- and low-latitude region, but exhibit a significant difference in the high-latitude region, especially in the 80°S~60°S. This may be primarily two reasons. Firstly, there is no Jason series altimeter data in areas beyond 66° due to the orbit inclination of 66°, which leads to a reduction in the amount of altimeter data. Another important reason is that the sea surface condition in high-latitude regions is complex, such as the Southern Ocean Circumpolar Current and sea ice, which affects the quality of the altimeter data.
Statistics on the difference between marine gravity anomaly models and the ship-borne gravity data at different distances away from coastlines is listed in Table 5. Statistics on the difference depending on water depth are listed in Table 6. The accuracy of gravity anomalies is improved with the distances from coastlines and water depth. In areas where the water depth changes slightly, the gravity anomaly changes smoothly. In areas with special seabed structures, gravity anomalies change dramatically. Therefore, the gravity anomalies retrieved by SDUST2023(GRA), SIOV32.1, and DTU17 at different water depths are compared with the data of NCEI ship-borne gravity data, and the statistical results are shown in Table 6. Within the regions with distance less than 10 km and water depth less than 1 km, the accuracy of three gravity anomaly model is affected in coastal region, but the SDUST2023GRA_MSS is slightly better than other two models. The mean sea surface model is constructed by altimeter data, so the accuracy in coastal region is generally lower than that of open ocean. With the increase of distances and water depth, the accuracy of gravity anomaly is constantly improved. When the distance greater than 50 km and the water depth greater than 4 km, the difference of three models is the small.
To further validate gravity anomalies with different seabed topographic changes, the seafloor topographic slope at grid points can be obtained as follows:
Table 7 shows that the accuracy of SDUST2023GRA_MSS within the seafloor topographic gradient range of 0 to 250 arcmin is decreased with the topographic gradient increases. This trend is primarily due to significant changes in seafloor topography resulting in low accuracy in areas with dramatic topographic changes.
Although various validations show that the new model has a slight advantage in specific regions. However, there are still challenges for the recovery of gravity anomalies from conventional radar altimeter data in coastal regions. The accuracy of radar altimeter data significantly decreases in coastal areas, and the data volume also sharply decreases due to the altimeter operating modes. The spatial resolution of gravity anomaly model is also related to the altimeter-operating mode. This advancement of recovered gravity anomalies from altimetry are expected to the wide-swath altimeter data from SWOT missions.
Code availability
The code of data processing is available on GitHub (https://github.com/Aolus1/Calculated-_DOV).
References
Andersen, O. B., Rose, S. K., Abulaitijiang, A., Zhang, S. & Fleury, S. The DTU21 global mean sea surface and first evaluation. Earth Syst. Sci. Data 15, 4065–4075, https://doi.org/10.5194/essd-15-4065-2023 (2023).
Sandwell, D. T., Muller, R. D., Smith, W. H. F., Garcia, E. & Francis, R. New global marine gravity model from CryoSat-2 and Jason-1 reveals buried tectonic structure. Science 346, 65–67, https://doi.org/10.1126/science.1258213 (2014).
Flechtner, F. et al. Satellite Gravimetry: A Review of Its Realization. Surv. Geophys. 42, 1029–1074, https://doi.org/10.1007/s10712-021-09658-0 (2021).
Rathnayake, S. & Tenzer, R. Interpretation of the lithospheric structure beneath the Indian Marine from gravity gradient data. J. Asian Earth Sci. 183, 103934, https://doi.org/10.1016/j.jseaes.2019.103934 (2019).
Brockley, D. J. et al. REAPER: Reprocessing 12 years of ERS-1 and ERS-2 altimeters and microwave radiometer data. IEEE Trans. Geosci. Remote Sens. 55, 5506–5514, https://doi.org/10.1109/TGRS.2017.2709343 (2017).
Markus, T. et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 190, 260–273, https://doi.org/10.1016/j.rse.2016.12.029 (2017).
Chelton, D. B., Walsh, E. J. & MacArthur, J. L. Pulse compression and sea level tracking in satellite altimetry. J. Atmos. Oceanic Technol. 6, 407–438 (1989).
Labroue, S. et al. First quality assessment of the Cryosat-2 altimetric system over ocean. Adv. Space Res. 50, 1030–1045, https://doi.org/10.1016/j.asr.2011.11.018 (2012).
Li, Z. et al. The SDUST2022GRA global marine gravity anomalies recovered from radar and laser altimeter data: Contribution of ICESat-2 laser altimetry. Earth Syst. Sci. Data 16, 4119–4135, https://doi.org/10.5194/essd-16-4119-2024 (2024).
Stanev, E. V. & Peneva, E. L. Regional sea level response to global climatic change: Black Sea examples. Glob. Planet. Change 32, 33–47, https://doi.org/10.1016/S0921-8181(01)00148-5 (2001).
Zhu, C., Guo, J., Hwang, C., Yuan, J. & Liu, X. How HY-2A/GM altimeter performs in marine gravity derivation: assessment in the South China Sea. Geophys. J. Int. 219, 1056–1064, https://doi.org/10.1093/gji/ggz330 (2019).
Bao, L. et al. First accuracy assessment of the HY-2A altimeter sea surface height observations: Cross-calibration results. Adv. Space Res. 55, 90–105, https://doi.org/10.1016/j.asr.2014.09.034 (2015).
Fu, L. L. & Ubelmann, C. On the transition from profile altimeter to swath altimeter for observing global ocean surface topography. J. Atmos. Oceanic Technol. 31, 560–568, https://doi.org/10.1175/JTECH-D-13-00109.1 (2014).
Jiang, W., Li, J. & Wang, Z. Determination of global mean sea surface WHU2000 using multi-satellite altimetric data. Chin. Sci. Bull. 47, 1664–1668, https://doi.org/10.1007/BF03184119 (2002).
Hwang, C., Hsu, H. Y. & Jang, R. J. Global mean sea surface and marine gravity anomaly from multi-satellite altimetry: applications of deflection-geoid and inverse Vening-Meinesz formulas. J. Geod. 76, 407–418, https://doi.org/10.1007/s00190-002-0265-6 (2002).
Yuan, J. et al. High-resolution sea level change around China seas revealed through multi-satellite altimeter data. Int. J. Appl. Earth Obs. Geoinf. 102, 102433, https://doi.org/10.1016/j.jag.2021.102433 (2021).
Hwang, C. & Chang, E. T. Y. Seafloor secrets revealed. Science 346, 32–33, https://doi.org/10.1126/science.1260459 (2014).
Yang, J., Jekeli, C. & Liu, L. Seafloor topography estimation from gravity gradients using simulated annealing. J. Geophys. Res. Solid Earth 123, 6958–6975, https://doi.org/10.1029/2018jb015883 (2018).
Gozzard, S. et al. South China Sea crustal thickness and oceanic lithosphere distribution from satellite gravity inversion. Pet. Geosci. 25, 112–128, https://doi.org/10.1144/petgeo2016-162 (2019).
Guo, J. Y., Chang, X. T., Hwang, C., Sun, J. L. & Han, Y. B. Oceanic surface geostrophic velocities determined with satellite altimetric crossover method. Chin. J. Geophys. 53, 926–934, https://doi.org/10.1002/cjg2.1563 (2010).
Zaron, E. D. Simultaneous estimation of marine tides and underwater topography in the Weddell Sea. J. Geophys. Res. Oceans 124, 3125–3148, https://doi.org/10.1029/2019JC015037 (2019).
Sandwell, D. T. & Smith, W. H. F. Marine gravity anomaly from Geosat and ERS 1 satellite altimetry. J. Geophys. Res. Solid Earth 102, 10039–10054, https://doi.org/10.1029/96JB03223 (1997).
Hwang, C., Kao, E. C. & Parsons, B. Global derivation of marine gravity anomalies from Seasat, Geosat, ERS-1 and TOPEX/POSEIDON altimeter data. Geophys. J. Int. 134, 449–459, https://doi.org/10.1111/j.1365-246X.1998.tb07139.x (1998).
Smith, G. N. Mean gravity anomaly prediction from terrestrial gravity data and satellite altimeter data. Dept. of Geodetic Science Report No.214, The Ohio State University, Columbus, Ohio (1974).
Gopalapillai, S. Non-global recovery of gravity anomalies from a combination of terrestrial and satellite altimetry data. Ph.D. thesis, Ohio State University (1974).
Yu, Y., Sandwell, D. T., Dibarboure, G., Chen, C. & Wang, J. Accuracy and resolution of SWOT altimetry: Foundation seamounts. Earth Space Sci. 11(6), e2024EA003581, https://doi.org/10.1029/2024EA003581 (2024).
Andersen, O. B. & Knudsen, P. The DTU17 global marine gravity field: First validation results. In Fiducial Reference Measurements for Altimetry, International Association of Geodesy Symposia, Mertikas, S. & Pail, R., Eds. Springer: Berlin/Heidelberg, Germany 150, 83-87 (2019).
Wan, X. Y., Annan, R. F. & Wang, W. B. Assessment of HY-2A GM data by deriving the gravity field and bathymetry over the Gulf of Guinea. Earth, Planets Space 72, 1–3, https://doi.org/10.1186/s40623-020-01291-2 (2020).
Guo, J. et al. Accuracy comparison of marine gravity derived from HY-2A/GM and CryoSat-2 altimetry data: a case study in the Gulf of Mexico. Geophys. J. Int. 230(2), 1267–1279, https://doi.org/10.1093/gji/ggac114 (2022).
Zhang, S., Li, J., Jin, T. & Che, D. HY-2A Altimeter Data Initial Assessment and Corresponding Two-Pass Waveform Retracker. Remote Sens. 10, 507, https://doi.org/10.3390/rs10040507 (2018).
Yu, D., Hwang, C., Andersen, O. B., Chang, E. T. & Gaultier, L. Gravity recovery from SWOT altimetry using geoid height and geoid gradient. Remote Sens. Environ. 265, 112650, https://doi.org/10.1016/j.rse.2021.112650 (2021).
Wei, X. et al. Gravity anomalies determined from mean sea surface model data over the Gulf of Mexico. Acta Oceanol. Sin. 42, 39–50, https://doi.org/10.1007/s13131-023-2178-6 (2023).
Jin, T. et al. Analysis of vertical deflections determined from one cycle of simulated SWOT wide-swath altimeter data. J. Geod. 96(4), 30, https://doi.org/10.1007/s00190-022-01619-8 (2022). (2022).
Hwang, C. & Barry, P. Gravity anomalies derived from Seasat, Geosat, ERS-1, and TOPEX/POSEIDON altimetry and ship gravity: a case study over the Reykjanes Ridge. Geophys. J. Int. 122, 551–568, https://doi.org/10.1111/j.1365-246X.1995.tb07013.x (1995).
Zhu, C. et al. Marine gravity determined from multi-satellite GM/ERM altimeter data over the South China Sea: SCSGA V1. 0. J. Geod. 94, 50, https://doi.org/10.1007/s00190-020-01378-4 (2020).
Yuan, J. et al. SDUST2020 MSS: A global 1′× 1′ mean sea surface model determined from multi-satellite altimetry data. Earth Syst. Sci. Data 15, 155–169, https://doi.org/10.5194/essd-15-155-2023 (2023).
Knudsen P, Andersen OB, Maximenko N, Hafner J. A new combined mean dynamic topography model–DTUUH22MDT. In Living Planet Symposium, Bonn, Germany 2022 Oct. https://ostst.aviso.altimetry.fr/fileadmin/user_upload/OSTST2022/Presentations/GEO2022-A_new_combined_mean_dynamic_topography_model_-_DTUUH22MDT.pdf [available on November 2024].
Zingerle, P., Pail, R., Gruber, T. & Oikonomidou, X. The combined global gravity field model XGM2019e. J. Geod. 94, 66, https://doi.org/10.1007/s00190-020-01398-0 (2020).
Guo, J. Y. et al. A new global marine gravity anomaly model SDUST2023GRA_MSS: determined from mean sea surface model. Figshare https://doi.org/10.6084/m9.figshare.26969869 (2023).
Acknowledgements
We are very grateful to the NOAA for providing the ship-borne gravity data, the Technical University of Denmark for providing DTU17, Scripps Institution of Oceanography for providing V32.1. The study is supported by the National Natural Science Foundation of China (Grant No. 42274006, 42174041, and 42430101).
Author information
Authors and Affiliations
Contributions
J. Guo designs a method to construct marine gravity anomaly based on mean sea surface model, and carefully adjusts the structure of the paper; X. Wei wrote the code to calculate the vertical deviation based on the mean sea surface and wrote this article; Z. Li carries out, translates and polishes this article; Y. Jia and X. Chang put forward some suggestions for improvement according to the content of the article; X. Liu revised the details and mistakes of the article in detail and gave some suggestions. All the authors participated in the writing and revision of this article.
Corresponding author
Ethics declarations
Competing interests
The authors declare no known financial interests or personal relationships that could influence the work reported in this paper.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Guo, J., Wei, X., Li, Z. et al. SDUST2023GRA_MSS: the new global marine gravity anomaly model determined from mean sea surface model. Sci Data 12, 108 (2025). https://doi.org/10.1038/s41597-025-04394-1
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41597-025-04394-1
