
Abstract
The ride comfort is controlled by the suspension system. In this article, an active suspension system is used to control vehicle vibration. Vehicle oscillations are simulated by a quarter-dynamic model with five state variables. This model includes the influence of the hydraulic actuator in the form of linear differential equations. This is a completely novel model. Besides, the OSMC algorithm is proposed to control the operation of the active suspension system. The controller parameters are optimized by the in-loop algorithm. According to the results of the study, under normal oscillation situations, the maximum and average values of the sprung mass were significantly reduced when the OSMC algorithm was applied. In dangerous situations, the wheel is completely separated from the road surface if the vehicle uses only the passive suspension system or active suspension system with a conventional linear control algorithm. In contrast, the interaction between the wheel and the road surface is always guaranteed when the OSMC algorithm is used to control the operation of the active suspension system. The efficiency that this algorithm brings is very high.
Similar content being viewed by others


Introduction
The suspension system is one of the most important systems in a vehicle. Over the years, the suspension system has been more and more perfected and developed. The suspension system is used to ensure that the vehicle’s vibrations are within the allowable limits. The structure of the passive suspension system is quite simple, including a coil spring (or leaf spring), a damper, and a lever arm. Besides, the stabilizer bar is also considered part of the suspension system1. The suspension system is located between the axle and the body of the vehicle. It divides the vehicle into two separate parts, including the sprung mass and the unsprung mass2. When the vehicle’s body vibrates, the internal forces generated by the suspension system act on both parts of the mass to control the vibrations. The stiffness of these components plays an important role in ensuring the vehicle’s smoothness when traveling on the road. For a passive suspension system, it is not possible to change the stiffness of the spring or damper. Therefore, smoothness will not be guaranteed in many cases. As a result, several automatically controlled suspension systems have been used to replace conventional mechanical suspensions. In Ref.3, Zepeng et al. introduced the use of air suspension on the vehicle. This suspension system uses an air balloon (air spring) to replace the metal spring. As air is supplied or withdrawn from the balloon, the pressure inside changes. This causes the stiffness of the air spring to change continuously in response to the driving conditions of the vehicle4. Besides, changing the stiffness of the damper is also a concern. In Ref.5, Khedkar et al. presented an electronic damping model with an average response. The circulation rate of the liquid inside the damper depends on the arrangement of the iron particles inside. When the vehicle’s body vibrates, an electric current signal is applied to the inside of the damper. A magnetic field will appear that changes the arrangement of small metal particles. Therefore, the damping stiffness can be changed6. Because the response of the system is still incomplete, the suspension system is therefore called semi-active. To improve the efficiency of the suspension system, an active suspension system was used. Each wheel has a hydraulic actuator as part of the active suspension7. This mechanism works based on the opening and closing of servo valves. The process of opening and closing the valve gates is controlled by the current signal of the controller8. According to Nguyen, the hydraulic actuator will generate force to act on both the sprung and unsprung masses. This force is used to reduce the vibrations of the vehicle. From there, the smoothness of the vehicle will be significantly improved9.
Several control algorithms for the active suspension system have been introduced in recent times. Anh used the PID control algorithm for this system in Ref.10. The PID algorithm is suitable for SISO linear systems. Abdullah et al. presented the MOPID model for the active suspension system in Ref.11. In this model, three controllers are used. These three controllers will control the KP, KI, and KD coefficients of the system, respectively. The parameters of the PID controller can be determined by the Ziegler–Nichols method. However, its accuracy will not be high12,13. Besides, these parameters can be determined more optimally thanks to some intelligent algorithms, such as GSA, PSO, etc.14,15. The values of these parameters can also be changed continuously thanks to the use of a Fuzzy-PID hybrid controller. If the fuzzy rule is properly constructed, this change is very positive16,17,18. If the system has many objects to be considered, that is, a MIMO system, the LQR control algorithm is the suitable alternative19. According to Maurya and Bhangal, the LQR algorithm uses state matrices instead of the usual system of differential equations20. According to Rodriguez-Guevara et al., the LQR algorithm is designed based on the optimization of the cost function21. At that time, the efficiency of the system can reach a high level. To limit the influence of noise, a Gaussian filter is often combined with this algorithm22,23,24.
In practice, vehicle oscillations are often random. These are nonlinear oscillations. Conventional linear controllers cannot guarantee stable performance in many cases. In Ref.25, Bai and Guo proposed the use of the SMC algorithm for the active suspension system. For this algorithm, it is necessary to determine the state variables of the oscillatory state matrix26. If hydraulic actuators are considered, the number of possible state variables is 5 (for a quarter-dynamics model), or 10 (for a half-dynamics model)27,28. This will make the process of derivation of state variables extremely difficult. Therefore, Nguyen performed the process of linearizing the hydraulic actuator to be used for the SMC algorithm with 5 state variables29. The SMC algorithm can also be combined with the PSO algorithm to improve efficiency when choosing controller parameters30. Some oscillations change continuously and are not fixed in any state. Therefore, the Fuzzy algorithm was proposed to determine these states. The Fuzzy algorithm can be used for the suspension system, stabilizer bar, and many other control systems31,32. This algorithm can respond to the continuous change of the input signal, which has been shown in the article by Mustafa et al.33. Fuzzy control laws can be determined based on the experience of the designer. Besides, the Fuzzy algorithm can be easily combined with many other algorithms34,35,36. In general, the efficiency of nonlinear and intelligent control methods is very high37,38,39,40. In addition, some optimization methods used to select controller parameters have also been applied in some papers41,42,43. The results brought from these methods are positive.
Methods
Model of the vehicle dynamics
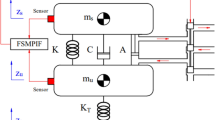
There are many dynamic models used to simulate vehicle vibrations. For control problems, a quarter-dynamics model is often used. This model includes two masses: the sprung mass ms, and the unsprung mass, mu (Fig. 1). The system of equations describing the vibration of the vehicle is written in the following form:
where

The quarter-dynamics model.
Determining the impact force, FA is quite difficult. This value depends on a complex nonlinear function. A linear function is used to simplify the determination of the impact force FA29.
Nonlinear control theory
Assume that the nonlinear function has only one value and that there is a derivative at each level about the equilibrium point, xc. The nonlinear function has the form:
The deviation can be represented by Eq. (10). This equation is an expansion of the Taylor series.
Equation (10) can be rewritten as:
where
The linear approximation characteristic equation of the system is:
where I is the unit matrix.
According to Lyapunov theory, if the solution of Eq. (13) has a non-zero real part, then approximately linear characteristic equations always give the correct answer regarding the stability of the nonlinear system. If all the solutions to Eq. (13) have a negative real part, then the nonlinear system will be stable in a narrow range (14).
Conversely, if only one of the solutions to Eq. (13) has a positive real part, then the system is not stable. This is the view of Lyapunov’s first method when considering the stability of nonlinear systems. For this method, the disturbed motion has been rewritten as an approximate linear differential equation. The accuracy of the system after linearization is not high. To improve this problem, the second method of Lyapunov was proposed. According to the second method, some integral stages of the system can be omitted.
A nonlinear system can be described by a set consisting of many first-order linear differential equations.
The system of Eq. (15) can be rewritten as a matrix of states:
Lyapunov’s theorem
If a positive definite function is found \(V\left( x \right) = V\left( {x_{1} ,x_{2} ,...,x_{n} } \right)\) such that its derivative according to the differential equation of the disturbed motion \(\dot{x}_{1} = f\left( {x_{1} ,x_{2} ,...,x_{n} } \right)\) is negatively defined, the undisturbed motion will be asymptotically stable.
The quadratic form of the function V(x):
Sylvester’s theorem
The quadratic form of the function V(x) is positive definite if and only if all the principal diagonal determinants of the symmetric matrix Q must be positive.
Consider the nonlinear object of degree n described by Eq. (20):
where x is the state vector of the system, y is the output signal.
Take the derivative of the output signal n times:
with
Substitute (22) and (23) into (21):
Let e(t) be the error between the setpoint signal and the output signal:
The sliding surface is designed so that the signal error is minimized.
Coefficients pi are chosen so that the polynomial γ(s) is a Hurwitz polynomial.
Choose the Lyapunov function:
For the system to be stable, the derivative of V(x) needs to be negative, i.e.:
Based on Lyapunov stability theory, the SMC algorithm can be established.
OSMC controller design
The recommended OSMC algorithm is used to control the operation of the active suspension system. Combining equations from (1) to (8), we get:
For the quarter-dynamics model, the inertia force Fi of the sprung mass and the unsprung mass is considered to be proportional. This means that:
where χ is the proportional factor.
Let:
Taking the derivative of state variables:
In this article, the value of displacement of the sprung mass is considered as the output of the controller. Therefore:
Take the n-order derivative of the output signal. Where n is the number of state variables:
Let:
Equation (40) can be rewritten as:
The sliding surface of the controller is taken according to the error signal with derivative order n − 1:
With pi being the coefficients of the polynomial (27).
Combining Eqs. (20), (25), (42), and (43), the output signal of the controller has the form:
where
The parameters ai and pi of Eq. (44) are determined through the in-loop optimization algorithm. Their values will be used in turn to find the most optimal value that minimizes the vehicle’s vibrations. The general diagram of the OSMC algorithm is given as shown in Fig. 2.

OSMC algorithm.
Results
Investigation cases
This study only conducted simulations. The simulation is performed by the MATLAB-Simulink software. There are four types of excitations from the pavement that are used to conduct the vehicle vibration calculation. These four forms of stimulation correspond to the corresponding four cases (Fig. 3). These are the main pavement excitation types commonly used in simulation problems. As for the first two types (Fig. 3a,b), they are sine-shaped. This is the usual form of circulatory stimulation. The values of amplitude and frequency in these two cases are different. The last two types are the high-frequency excitation signal form (Fig. 3c,d), which more realistically depict the pavement. The equations describing these excitation signals are shown as follows:

Roughness on the road ((a) Case 1; (b) Case 2; (c) Case 3; (d) Case 4).
The amplitude and frequency of the oscillation will be changed by the investigation case. The output of the problem is values such as displacement of the sprung mass, acceleration of the sprung mass, dynamic load, and voltage of the controller. These values are calculated according to their maximum value and average value.
The maximum value of the output signal:
The average value of the output signal:
The parameters used for the simulation are given in Table 1. These parameters are obtained from CARSIM® software and in Ref.44.
Results and discussions
The results of the calculation and simulation are given in the graphs below. Figure 4 shows the displacement of the vehicle body over time. According to this result, the value of the displacement of the sprung mass is minimized when the OSMC algorithm for the active suspension system is used. On the contrary, its value can be maximized if the vehicle is only equipped with a mechanical suspension system. In the first case (a), its maximum value reaches 54.76 (mm), 23.32 (mm), and 7.58 (mm) respectively, corresponding to the three investigation situations. Besides, the average value calculated according to the RMS criterion is 22.40 (mm), 9.72 (mm), and 3.04 (mm) respectively. In the second case (b), the amplitude and frequency of the oscillation have been increased. As a result, the displacement values of the vehicle body are also increased. The values obtained in the second case reach 128.05 (mm), 46.79 (mm), and 14.76 (mm) for the maximum values, respectively; 82.32 (mm), 32.97 (mm), and 10.30 (mm) for mean values. These are only cyclic excitations, so the variation of values is also cyclical. Compared with the results in Ref.29, which applied the SMC algorithm to the suspension, the value of vehicle body displacement obtained from this paper is much smaller. Besides, the system’s stability is also better when using the OSMC algorithm instead of the SMC algorithm.

Displacement of the sprung mass ((a) Case 1; (b) Case 2; (c) Case 3; (d) Case 4).
In the other two cases, random stimulation was used. Therefore, the vehicle’s oscillation will also change continuously over time. In the third case (c), body vibration can reach 100.83 (mm) if the vehicle is not equipped with an active suspension system. In contrast, the maximum value of the displacement of the sprung mass is only about 31.90 (mm) and 10.57 (mm) if the vehicle uses an active suspension system with a hydraulic actuator. The average value of oscillations in these two situations is only 34.05% and 10.60% respectively, compared with the previous situation. Vehicle instability occurs in the last case (d). According to the results of Fig. 4d, the wheel will be lifted off the road at a time t = 2.5 (s), corresponding to the situation of the vehicle using only the passive suspension system. Besides, instability can also occur even when the vehicle has used the active suspension system. If the PID algorithm for the SISO system is applied, this instability still occurs at time t = 6.4 (s). Meanwhile, the OSMC algorithm still helps to ensure the stable performance of the vehicle during movement. The acceleration values obtained using the OSMC algorithm are all smaller than the conventional SMC algorithm28,29. Therefore, the smoothness of the car is better.
The acceleration of the sprung mass is considered to evaluate the smoothness when traveling on the road. The change in the acceleration of the sprung mass is shown in Fig. 5. In the first two cases, the acceleration is maximal at the first instant. Their maximum values corresponding to the three situations examined are: 0.79 (m/s2), 0.67 (m/s2), and 0.33 (m/s2) for the first case; 0.82 (m/s2), 0.34 (m/s2), and 0.11 (m/s2) for the second case. After the first phase of the oscillation, the acceleration value of the vehicle body will gradually decrease and change periodically with time. Their average values are, respectively, 0.29 (m/s2), 0.30 (m/s2), and 0.07 (m/s2) for the first case; 0.82 (m/s2), 0.34 (m/s2), and 0.11 (m/s2) for the next case. In the latter two cases, random oscillation will cause the vehicle's acceleration to change more. In the third case (c), the value of the acceleration varies continuously with time. If the vehicle is only equipped with a mechanical suspension system, the maximum and average values of acceleration can be up to 7.79 (m/s2) and 2.65 (m/s2). The value of acceleration when the vehicle uses an active suspension system with a PID controller is even greater than the situation where the vehicle only has a conventional passive suspension system. Its values can range between 8.28 and 2.73 (m/s2). This can increase the vehicle’s loss of comfort. However, the ride comfort can be improved when the OSMC algorithm is used for the suspension system. This improvement is not much, only 7.22 (m/s2), and 2.04 (m/s2). In the last situation, the performance of the OSMC controller is fully utilized. The vehicle still oscillates stably when the nonlinear control algorithm is used, while wheel separation has occurred in the other two situations.

Acceleration of the sprung mass ((a) Case 1; (b) Case 2; (c) Case 3; (d) Case 4).
The interaction between the wheel and the road surface is expressed through the change of the load at the wheel, i.e., the dynamic load (Fig. 6). With cyclic oscillation, the load change is small (Fig. 7), and the wheel stays on the road. With random oscillations, the variation of the load is much larger. In some cases, the dynamic load approaches zero, which means the wheel is detached from the road surface. At this point, instability will occur. If the wheel separation occurs only for a small period, the instability will not be large. Conversely, if the load variation continues to increase, the wheels will no longer be able to interact with the road surface. To ensure the stability of the vehicle when traveling on the road, the change in the dynamic load should not exceed 100%.

Dynamic load ((a) Case 1; (b) Case 2; (c) Case 3; (d) Case 4).

Changing of the dynamic load ((a) Case 1; (b) Case 2; (c) Case 3; (d) Case 4).
The impact force generated by the hydraulic actuator is dependent on the voltage supplied by the controller. Compared with traditional linear control algorithms, the OSMC algorithm will cause “chattering” (Fig. 8). This phenomenon will cause the control signal to vibrate continuously. In some cases, this phenomenon is harmful. However, the influence of the “chattering” phenomenon on the suspension control performed in this article is not large. Besides, the response time of the voltage signal when using the OSMC controller is also better than that of the PID controller. This makes the system more stable and efficient.

Voltage ((a) Case 1; (b) Case 2; (c) Case 3; (d) Case 4).
The results of the simulation are summarized in Tables 2, 3, 4, and 5.
Conclusions
Road surface roughness is the cause of the vehicle’s vibrations when traveling on the road. This oscillation can affect passengers and cargo. The active suspension system is used to reduce these oscillations. This article focuses on the study and application of the nonlinear control algorithm for the active suspension system. In this study, a quarter-dynamics model with a hydraulic actuator is included. The calculations and simulations take place in the MATLAB-Simulink environment. There are four simulated cases corresponding to the four pavement excitation types. In these cases, three situations are considered.
According to the simulation results, the maximum values and the average values of the vehicle body are very large when the vehicle uses only the passive suspension system. If an active suspension system with a PID algorithm is used, the vehicle’s vibrations can be slightly improved. However, this improvement is not much. Even the vehicle’s vibration is stronger in some cases. Vehicle oscillation is improved when the OSMC algorithm is used to control the active suspension system. The above values are all at their stable level when this algorithm is applied to the simulation process. Besides, the wheels always interact well with the road surface. The phenomenon of wheel separation can be more radically limited.
Compared with traditional control algorithms, the OSMC algorithm is much more complex. The effectiveness of this controller depends on the design of the sliding surface and the selection of state vectors. The “chattering” phenomenon still occurs on the output signal of the controller. However, its influence is very small. To improve the performance and stability of the controller, the OSMC algorithm can be combined with the Fuzzy and PID algorithms. This content will be continued in the next article.
Data availability
The data used to support this research are included within this article.
Abbreviations
- FA :
-
Force of the hydraulic actuator, N
- FC :
-
Force of the damper, N
- FK :
-
Force of the spring, N
- FKT :
-
Force of the tire, N
- Fi :
-
Force of the inertia, N
- zr :
-
Roughness on the road, m
- zs :
-
Displacement of the sprung mass, m
- zu :
-
Displacement of the unsprung mass, m
- GSA:
-
Gravitational search algorithm
- LQR:
-
Linear quadratic regulator
- MIMO:
-
Multi input–multi output
- OSMC:
-
Optimization–sliding mode control
- PID:
-
Proportional–derivative–integral
- PSO:
-
Particle swarm optimization
- SISO:
-
Single input–single output
- SMC:
-
Sliding mode control
References
Tuan, A. N. & Hoang, T. B. Research on dynamic vehicle model equipped active stabilizer bar. Adv. Sci. Technol. Eng. Syst. J. 4(4), 271–275 (2019).
Fu, Z. J. & Dong, X. Y. H∞ Optimal control of vehicle active suspension systems in two time scales. Automatika 62(2), 284–292 (2021).
Zepeng, G. et al. Research on air suspension control system based on fuzzy control. Energy Procedia 105, 2653–2659 (2017).
Nguyen, T. A. Advance the stability of the vehicle by using the pneumatic suspension system integrated with the hydraulic actuator. Latin Am. J. Solids Struct. 18(7), 621 (2021).
Khedkar, Y. M., Bhat, S. & Adarsha, H. A review of magnetorheological fluid damper technology and its applications. Int. Rev. Mech. Eng. 13(4), 256–264 (2019).
Guo, Y. Q., Xie, W. H. & Jing, X. Study on structures incorporated with MR damping material based on PSO algorithm. Front. Mater. 6, 37 (2019).
Sun, J. et al. Quantized feedback control of active suspension systems based on event trigger. Shock Vib. 2021, 8886069 (2021).
Tamburrano, P. et al. A review of electro-hydraulic servo valve research and development. Int. J. Fluid Power 20(1), 53–98 (2019).
Nguyen, T. A. Study on the sliding mode control method for the active suspension system. Int. J. Appl. Sci. Eng. 18(5), 1–10 (2021).
Anh, N. T. Control an active suspension system by using PID and LQR controller. Int. J. Mech. Prod. Eng. Res. Dev. 10(3), 7003–7012 (2020).
Abdullah, M. A. et al. Vehicle active suspension control using multi-order PID approach. J. Adv. Manuf. Technol. 11, 1–14 (2017).
Nguyen, T. A. Improving the comfort of the vehicle based on using the active suspension system controlled by the double-integrated controller. Shock Vib. 2021, 1–11 (2021).
Kumar, S. & Medhavi, A. Active and passive suspension system performance under random road profile excitations. Int. J. Acoust. Vib. 25(4), 532–541 (2020).
Chao, C. T. et al. A GSA-based adaptive fuzzy PID-controller for an active suspension system. Eng. Comput. 33(6), 1659 (2016).
Tan, D., Lu, C. & Zhang, X. Dual-loop PID control with PSO algorithm for the active suspension of the electric vehicle driven by in-wheel motor. J. Vibroeng. 18(6), 3915–3929 (2016).
Ding, X. et al. Design of and research into a multiple-fuzzy PID suspension control system based on road recognition. Processes 9, 2190 (2021).
Taghavifar, H. & Li, B. PSO-fuzzy gain scheduling of PID controllers for a nonlinear half-vehicle suspension system. SAE Int. J. Passenger Veh. Syst. 12(1), 5–20 (2019).
Ahmed, A. A. & Özkan, B. Using of fuzzy PID controller to improve vehicle stability for planar model and full vehicle models. Int. J. Appl. Eng. Res. 12(5), 671–680 (2017).
Uddin, N. Optimal control design of active suspension system based on Quarter Car model. J. Infotel 11(2), 55–61 (2019).
Maurya, V. K. & Bhangal, N. S. Optimal control design of active suspension system based on Quarter Car model. J. Autom. Control Eng. 6(1), 22–26 (2018).
Guevara, D. R. et al. Active suspension control using an MPC-LQR-LPV controller with attraction sets and quadratic stability conditions. Mathematics. https://doi.org/10.3390/math9202533 (2021).
Chen, S. et al. A novel LQG controller of active suspension system for vehicle roll safety. Int. J. Control Autom. Syst. 16(5), 2203–2213 (2018).
Pang, H. et al. Design of LQG controller for active suspension without considering road input signals. Shock Vib. 2017, 6573567 (2017).
Park, M. & Yim, S. Design of static output feedback and structured controllers for active suspension with Quarter-Car model. Energies 14, 8231 (2021).
Bai, R. & Guo, D. Sliding-mode control of the active suspension system with the dynamics of a hydraulic actuator. Complexity 2018, 5907208 (2018).
Deshpande, V. S., Bhaskara, M. & Phadke, S. B. Sliding mode control of active suspension systems using a disturbance observer. In 12th IEEE Workshop on Variable Structure Systems, 70–75 (2012).
Liu, S. et al. Strongly perturbed sliding mode adaptive control of vehicle active suspension system considering actuator nonlinearity. Veh. Syst. Dyn. 60, 597 (2020).
Nguyen, D. N., Nguyen, T. A. & Dang, N. D. A novel sliding mode control algorithm for an active suspension system considering with the hydraulic actuator. Latin Am. J. Solids Struct. https://doi.org/10.1590/1679-78256883 (2022).
Nguyen, T. A. Advance the efficiency of an active suspension system by the sliding mode control algorithm with five state variables. IEEE Access 9, 164368–164378 (2021).
Wei, S. & Su, X. Sliding mode control design for active suspension systems using quantum particle swarm optimization. Int. J. Veh. Des. 81(1/2), 93–114 (2019).
Nguyen, T. A. Preventing the rollover phenomenon of the vehicle by using the hydraulic stabilizer bar controlled by a two-input fuzzy controller. IEEE Access 9, 129168–129177 (2021).
Nguyen, T. A. Improving the stability of the passenger vehicle by using an active stabilizer bar controlled by the fuzzy method. Complexity 2021, 6569298 (2021).
Mustafa, G. I. Y., Wang, H. & Tian, Y. Model-free adaptive fuzzy logic control for a half-car active suspension system. Stud. Inform. Control 28(1), 13–24 (2019).
Fard, H. M. & Samadi, F. Active suspension system control using adaptive neuro fuzzy (ANFIS) controller. Int. J. Eng. Trans. C Asp. 28(3), 396–401 (2015).
Abdulzahra, A. K. & Abdalla, T. Y. Fuzzy sliding mode control scheme for vehicle active suspension system optimized by ABC algorithm. Int. J. Intell. Syst. Appl. 11, 1–10 (2019).
Kumar, P. S. et al. Adaptive neuro fuzzy inference system control of active suspension system with actuator dynamics. J. Vibroeng. 20(1), 541–549 (2018).
Swethamarai, P. & Lakshmi, P. Adaptive-fuzzy fractional order PID controller based active suspension for vibration control. IETE J. Res. https://doi.org/10.1080/03772063.2020.1768906 (2020).
Hamza, A. & Yahia, N. B. Heavy trucks with intelligent control of active suspension based on artificial neural networks. J. Syst. Control Eng. 235, 952 (2020).
Aldair, A. A. & Wang, W. J. A neurofuzzy controller for full vehicle active suspension systems. J. Vib. Control 18(12), 1837–1854 (2011).
Konoiko, A. et al. Deep learning framework for controlling an active suspension system. J. Vib. Control 25(17), 2316–2329 (2019).
Seifi, A. & Hassannejad, R. Parameters uncertainty in pareto optimization of nonlinear inerter-based suspension system under nonstationary random road excitation. Proc. Inst. Mech. Eng. D J. Autom. Eng. 236(12), 2725–2744 (2022).
Shen, Y. et al. Optimal design and dynamic performance analysis of a fractional-order electrical network-based vehicle mechatronic ISD suspension. Mech. Syst. Signal Process. 184, 109718 (2022).
Gu, B. et al. A novel robust finite time control approach for a nonlinear disturbed quarter-vehicle suspension system with time delay actuation. Automatika 63(4), 627–639 (2022).
Nguyen, D. N. & Nguyen, T. A. A novel hybrid control algorithm sliding mode-PID for the active suspension system with state multivariable. Complexity. https://doi.org/10.1155/2022/9527384 (2022).
Author information
Authors and Affiliations
Contributions
T.A.N. wrote the main manuscript text; D.N.N. prepared figures and tables; T.A.N. done the simulation process.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Nguyen, D.N., Nguyen, T.A. Evaluate the stability of the vehicle when using the active suspension system with a hydraulic actuator controlled by the OSMC algorithm. Sci Rep 12, 19364 (2022). https://doi.org/10.1038/s41598-022-24069-w
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-022-24069-w
This article is cited by
-
Integrating digital twins with neural networks for adaptive control of automotive suspension systems
Scientific Reports (2025)
-
Dynamic Simulation of an Oil and Gas Plant Using Aspen-HYSYS®: A Real Start-Up Process
Arabian Journal for Science and Engineering (2025)
-
Adaptive suspension state estimation based on IMMAKF on variable vehicle speed, road roughness grade and sprung mass condition
Scientific Reports (2024)
-
Genetic algorithm inspired optimal integrated nonlinear control technique for an electric power steering system
Journal of the Brazilian Society of Mechanical Sciences and Engineering (2024)
-
Torque coordinated control of the through-the-road (TTR) 4-wheel-drive (4WD) hybrid vehicle under extreme road conditions
Scientific Reports (2023)
