
Abstract
The utilization of the Lie group method serves to encapsulate a diverse array of wave structures. This method, established as a robust and reliable mathematical technique, is instrumental in deriving precise solutions for nonlinear partial differential equations (NPDEs) across a spectrum of domains. Its applications span various scientific disciplines, including mathematical physics, nonlinear dynamics, oceanography, engineering sciences, and several others. This research focuses specifically on the crucial molecule DNA and its interaction with an external microwave field. The Lie group method is employed to establish a five-dimensional symmetry algebra as the foundational element. Subsequently, similarity reductions are led by a system of one-dimensional subalgebras. Several invariant solutions as well as a spectrum of wave solutions is obtained by solving the resulting reduced ordinary differential equations (ODEs). These solutions govern the longitudinal displacement in DNA, shedding light on the characteristics of DNA as a significant real-world challenge. The interactions of DNA with an external microwave field manifest in various forms, including rational, exponential, trigonometric, hyperbolic, polynomial, and other functions. Mathematica simulations of these solutions confirm that longitudinal displacements in DNA can be expressed as periodic waves, optical dark solitons, singular solutions, exponential forms, and rational forms. This study is novel as it marks the first application of the Lie group method to explore the interaction of DNA molecules.
Similar content being viewed by others

Introduction
DNA stands as one of the most intricate and all-encompassing molecules in the realm of life. Numerous models aiming to describe the general properties of DNA dynamics prove to be intricate due to the multitude of elements inherent in each instance1.
The inaugural demonstration of resonant microwave absorption in DNA was conducted by Webb and Booth2. Subsequent investigations into the microwave absorption characteristics of DNA were undertaken by Swicord and Davis3,4. Nonetheless, the outcomes reported by Gabriel et al.5, Yakushevich6, Bixon et al.7, Henderson8, and Bruinsma9 have introduced a degree of controversy to these observations. Consequently, diverse methodologies have been proposed to articulate models of DNA. Yakushevich6 extensively delved into the nonlinear properties inherent in the physics of DNA. Some DNA models have been predicated on linear constructs5,10,11, whereas others have embraced nonlinear frameworks12,13,14. Muto et al. were pioneers in presenting a nonlinear mathematical model elucidating the interaction between DNA and an external microwave field15
the notation u(z, t) is employed to characterize longitudinal displacements in DNA12,13. Deciphering the concealed characteristics of DNA poses a significant real-world challenge. Recently, Kong et al.1, Alka et al.15, and Abdelrahman et al.16 have proposed an innovative physical-mathematical model for double-chain DNA. This model envisions DNA as comprising two extended, elastic, homogeneous strands connected by an elastic membrane, symbolizing the hydrogen bonds between the base pairs of the two chains.
The Lie group method17,18 stands out as a fundamental and potent tool in addressing various aspects such as invariant solutions, conservation laws, linearization, reducing the order of nonlinearity in nonlinear problems, and assessing the stability of a numerical scheme. Pioneered by Sophus Lie and notably advanced by Ovsiannikov19, Ibragimov20, Bluman21, Olver22, and others, this method has found applications in diverse problem domains. It has been successfully applied to challenges ranging from nonlinear elastic structural element equations23 to the beam equation in the Timoshenko model24, the (3+1)-dimensional generalized nonlinear evolution equation in shallow water waves25, the Slepyan-Palmov Model in the Slepyan-Palmov Medium26, and the Thomas equation using symmetry transformations27. The method has also been extended to discrete domain equations28.
In this context, our motivation is to employ this powerful method to explore the characteristics of displacement in DNA and its interactions with an external microwave field. By applying the Lie group method29,30,31,32,33,34,35,36,37,38 to the study of DNA molecules, we can leverage the group structure to elucidate a broad class of wave spectrum. This spectrum provides insights into the nature of DNA displacement, expressing it as periodic waves, optical dark solitons, singular solutions, exponential forms, and rational forms. These results are groundbreaking and represent novel contributions not previously documented in the theory of DNA molecules.
The structure of the paper unfolds as follows: In Sect. "Invariant analysis and the optimal subalgebraic system", we delve into applying the Lie group method to the DNA Eq. (1) and explore its optimal system. Section "Invariant solutions via non similar classes" employs the optimal system to derive invariant solutions and reduced ODEs. The new auxiliary equation method is introduced in Sect. "The new auxiliary equation method", and its implementation to the DNA Eq. (1) is detailed in Sect. "Implementation of new auxiliary equation method". Section "Physical nature of the obtained solutions" provides an overview of the nature of longitudinal displacement in DNA based on the solutions obtained. The paper concludes in Sect. "Discussion and conclusions", offering a summary and pointing towards potential future directions.
Invariant analysis and the optimal subalgebraic system
This section is dedicated to the comprehensive analysis of Lie symmetries and the optimal system corresponding to Eq. (1). We initiate our investigation by considering a one-parameter Lie group of transformations22
where \(\varepsilon \) is the parameter of a Lie group. The transformations mentioned above have an associated infinitesimal generator
The central aim is to identify the coefficient functions \(\phi _{1}, \phi _{2}\), and \(\vartheta \), while verifying that the operator \({\mathcal {Y}}\) conforms to the requirements of the Lie symmetry condition
where \({\mathcal {Y}}^{[4]}\) denotes the fourth prolongation of \({\mathcal {Y}}\) and
Through the resolution of Eq. (4), the infinitesimal terms are determined and can be expressed as,
which leads to the five-dimensional Lie algebra of Eq. (1) given by
We can write down the representation of the adjoint action as (Table 1),
By utilizing the adjoint expression (6), we can create the adjoint representation table, which is provided in Table 2.
Optimal system
Consider an arbitrary element \({\mathcal {Y}}\) of five-dimensional Lie algebra \(\theta ^{5}\) given by,
We will employ the adjoint action provided in Table 2 to simplify the coefficients in (7) as extensively as possible.

\({\text {Case 1}}\): \(k_5 \ne 0,k_3 \ne 0\), then (7) becomes
By taking, \(k_3 =1\), we obtain,
\({\text {Case 2}}\): \(k_5 \ne 0,k_3 = 0\), then (7) becomes
So, we obtain,
\({\text {Case 3}}\): \(k_5 = 0,k_4 \ne 0,k_3 \ne 0, k_1 \ne 0\), then (7) becomes
By taking \(k_1 =1\), we get,
\({\text {Case 4}}\): \(k_5 = 0,k_4 \ne 0,k_3 \ne 0, k_1 = 0\), then (7) becomes,
By taking \(k_3 =1\), we get,
\({\text {Case 5}}\): \(k_5 = 0,k_4 = 0,k_3 \ne 0, k_1 \ne 0\), then (7) becomes
By taking, \(k_1 =1\), we get,
\({\text {Case 6}}\): \(k_5 = 0,k_4 = 0,k_3 \ne 0, k_1 = 0\), then (7) becomes
So, we get,
\({\text {Case 7}}\): \(k_5 = 0,k_4 \ne 0,k_3 = 0, k_1 \ne 0\), then (7) becomes
By taking \(k_1 =1\), we obtain,
\({\text {Case 8}}\): \(k_5 = 0,k_4 \ne 0,k_3 = 0, k_1 = 0\), then (7) becomes,
So, we obtain,
\({\text {Case 9}}\): \(k_5 = 0,k_4 = 0,k_3 = 0, k_1 \ne 0\), then (7) becomes,
So, we obtain,
\({\text {Case 10}}\): \(k_5 = 0,k_4 = 0,k_3 = 0, k_1 =0\), then (7) becomes
So, we get,
Accordingly, the one-dimensional optimal organization for Lie algebra (5) is detailed as
where two real parameters, denoted as c and d in the given context, consistently maintain a non-zero status.
Invariant solutions via non similar classes
Within this section, we introduce invariant solutions that are explicitly formulated after subjecting the system to symmetry reduction under the optimal configuration (42). Employing similarity reductions, the nonlinear Eq. (1) undergoes simplification, transforming into ordinary differential equations (ODEs) recognized as similarity reduction equations. These equations possess the capability to produce solutions that exhibit invariance under group transformations.
Invariant solution by non similar class
\(\Lambda _{9}=\langle {\mathcal {Y}}_{1} \rangle \).
Taking into account the symmetry generator, \({\mathcal {Y}}_{1}=\frac{\partial }{\partial t}\), the characteristic equation is presented as follows:
The use of similarity variables, \(u = h(\sigma )\) and \(\sigma = z\) leads to the Eq. (1) being reduced to an ordinary differential equation,
If \(h''=0\), this gives \(h(\sigma )=c_1 \sigma +c_2.\) So, the exact solution of (1) becomes
If \(h'' \ne 0,\) then \(2\gamma h' +\alpha ^{2} =0\), which yields \(h(\sigma )=c_1 -\frac{\alpha ^{2}}{2\gamma } \sigma .\) Thus, the invariant solution for the DNA Eq. (1) is written as,
Invariant solution by non similar class
\(\Lambda _{6}=\langle {\mathcal {Y}}_{3} \rangle \).
Taking into account the symmetry generator \({\mathcal {Y}}_{3}=\frac{\partial }{\partial z}\), the characteristic equation is presented as follows
The use of similarity variables \(u = h(\sigma )\) and \(\sigma = t\) leads to the Eq. (1) being reduced to an ordinary differential equation
this gives,
Thus, the invariant solution for the DNA Eq. (1) is written as
Invariant solution by non similar class
\(\Lambda _{7}=\langle {\mathcal {Y}}_{1} +{\mathcal {Y}}_4 \rangle \).
Taking into account the symmetry generator \({\mathcal {Y}}_{1}+{\mathcal {Y}}_4 =\frac{\partial }{\partial t}+t\frac{\partial }{\partial u}\), the characteristic equation is presented as follows
The use of similarity variables \(u = \frac{t^{2}}{2}+h(\sigma )\) and \(\sigma = z\) leads to the Eq. (1) being reduced to an ordinary differential equation
This gives,
Thus, the invariant solution for the DNA Eq. (1) is written as
Invariant solution by non similar class
\(\Lambda _{7}=\langle {\mathcal {Y}}_{1} -{\mathcal {Y}}_4 \rangle \).
Taking into account the symmetry generator \({\mathcal {Y}}_{1}-{\mathcal {Y}}_4 =\frac{\partial }{\partial t}-t\frac{\partial }{\partial u}\), the characteristic equation is presented as follows
The use of similarity variables \(u = -\frac{t^{2}}{2}+h(\sigma )\) and \(\sigma = z\) leads to the Eq. (1) being reduced to an ordinary differential equation
this gives,
Thus, the invariant solution for the DNA Eq. (1) is written as
Invariant solution by non similar class
\(\Lambda _{4}=\langle {\mathcal {Y}}_{3} +{\mathcal {Y}}_4 \rangle \).
Taking into account the symmetry generator \({\mathcal {Y}}_{3}+{\mathcal {Y}}_4 =\frac{\partial }{\partial z}+t\frac{\partial }{\partial u}\), the characteristic equation is presented as follows
The use of similarity variables \(u = zt+h(\sigma )\) and \(\sigma = t\) leads to the Eq. (1) being reduced to an ordinary differential equation
this gives,
Thus, the invariant solution for the DNA Eq. (1) is written as
Invariant solution by non similar class
\(\Lambda _{4}=\langle {\mathcal {Y}}_{3} -{\mathcal {Y}}_4 \rangle \).
Taking into account the symmetry generator \({\mathcal {Y}}_{3}-{\mathcal {Y}}_4 =\frac{\partial }{\partial z}-t\frac{\partial }{\partial u}\), the characteristic equation is presented as follows
The use of similarity variables \(u = -zt+h(\sigma )\) and \(\sigma = t\) leads to the Eq. (1) being reduced to an ordinary differential equation
this gives,
Thus, the invariant solution for the DNA Eq. (1) is written as
Invariant solution by non similar class
\(\Lambda _{2}=\langle {\mathcal {Y}}_{5} \rangle \).
Taking into account the symmetry generator \({\mathcal {Y}}_{5} =t\frac{\partial }{\partial t}+(-2u-\frac{\alpha ^{2}}{\gamma }z)\frac{\partial }{\partial u}\), the characteristic equation is presented as follows
The use of similarity variables \(u = \frac{-\alpha ^{2}zt^{2}+2\gamma h(\sigma )}{2\gamma t^{2}}\) and \(\sigma = z\) leads to the Eq. (1) being reduced to an ordinary differential equation
We propose solving the aforementioned ODE numerically.
Invariant solution by non similar class
\(\Lambda _{5}=\langle {\mathcal {Y}}_{1} +{\mathcal {Y}}_3 \rangle \).
Taking into account the symmetry generator \({\mathcal {Y}}_{1}+{\mathcal {Y}}_3 =\frac{\partial }{\partial t}+\frac{\partial }{\partial z}\), the characteristic equation is presented as follows
The use of similarity variables \(u = h(\sigma )\) and \(\sigma = t-z\) leads to the Eq. (1) being reduced to an ordinary differential equation
Invariant solution by non similar class
\(\Lambda _{3}=\langle {\mathcal {Y}}_{1} +{\mathcal {Y}}_3 +{\mathcal {Y}}_4 \rangle \).
Taking into account the symmetry generator \({\mathcal {Y}}_{1}+{\mathcal {Y}}_3 +{\mathcal {Y}}_4 =\frac{\partial }{\partial t}+\frac{\partial }{\partial z}+t\frac{\partial }{\partial u}\), the characteristic equation is presented as follows
The use of similarity variables \(u = -\frac{z^{2}}{2}+zt+h(\sigma )\) and \(\sigma = -z+t\) leads to the Eq. (1) being reduced to an ordinary differential equation
We propose solving the aforementioned ODE numerically.
The new auxiliary equation method
Consider a general nonlinear partial differential equation (PDE) represented as
where Q is a polynomial function of u and their derivatives with respect to two independent variables z and t. The procedure has a few phases, which are listed below;
Step: 1 Suppose a new dependent and an independent variable as
where \(\sigma \) is a new independent variable, with c representing a real parameter for Eq. (64). By substituting Eq. (65) into Eq. (64), we obtain the following ODE;
Step: 2 Consider a solution for Eq. (66) in the following form
which satisfies the auxiliary equation
where \(b_{i}'s\) are constants which will be computed later.
Step: 3 To determine the value of k in Eq. (67), we employ the balancing procedure, where we compare the highest-order nonlinear term with the highest-order derivative.
Step: 4 By substituting Eqs. (67) and (68) into Eq. (66) and collecting the coefficients of various powers of \(\Theta ^{h(\sigma )}\) \((i=0,1,2,\cdots )\), we form a system of equations. Setting all coefficients equal to zero yields a system that can be solved using Maple software to obtain the solution.
Step: 5 The nature of solutions for Eq. (68) can be determined as;
Case:1 When \(\vartheta ^2_1-\vartheta _2\vartheta _3<0\) and \(\vartheta _3\ne 0\)
Case:2 When \(\vartheta _1^2+\vartheta _2\vartheta _3>0\) and \(\vartheta _3\ne 0\)
Case:3 When \(\vartheta _1^2+\vartheta _2\vartheta _3>0\) and \(\vartheta _3\ne 0\) and \(\vartheta _3\ne -\vartheta _2\)
Case: 4 When \(\vartheta _1^2+\vartheta _2\vartheta _3<0\), \(\vartheta _3\ne 0\) and \(\vartheta _3\ne -\vartheta _2\)
Case: 5 When \(\vartheta _1^2-\vartheta _2^2<0\) and \(\vartheta _3\ne -\vartheta _2\)
Case: 6 When \(\vartheta _1^2-\vartheta _2^2>0\) and \(\vartheta _3\ne -\vartheta _2\)
Case: 7 When \(\vartheta _2\vartheta _3>0\), \(\vartheta _3\ne 0\) and \(\vartheta _1=0\)
Case: 8 When \(\vartheta _1=0\) and \(\vartheta _2=-\vartheta _3\)
Case: 9 When \(\vartheta _1^2=\vartheta _2\vartheta _3\)
Case: 10 When \(\vartheta _1=k\), \(\vartheta _2=2k\) and \(\vartheta _3=0\)
Case: 11 When \(\vartheta _1=k\), \(\vartheta _3=2k\) and \(\vartheta _2=0\)
Case: 12 When \(2\vartheta _1=\vartheta _2+\vartheta _3\)
Case: 13 When \(-2\vartheta _1=\vartheta _2+\vartheta _3\)
Case: 14 When \(\vartheta _2=0\)
Case: 15 When \(\vartheta _2=\vartheta _1=\vartheta _3\ne 0\)
Case: 16 When \(\vartheta _2=\vartheta _3\), \(\vartheta _1=0\)
Case: 17 When \(\vartheta _3=0\)
Step: 6 Replacing all the values of \(\Theta ^{h(\sigma )}\) from step: 5 into Eq. (67), we get the results for Eq. (64).
Implementation of new auxiliary equation method
In this context, we analyze the traveling wave profiles for Eq. (1) using Eq. (62) and employing the new auxiliary equation method. The solution can be expressed as
Inserting Eq. (93) and its derivatives into Eq. (62), and subsequently equating the coefficients of \(\Theta ^{h(\sigma )}\), we form a system of algebraic equations. The solution to the resulting equations is provided below
Now by utilizing Eq. (94) into Eq. (93), we get
The traveling wave patterns for Eq. (1) based on the obtained result are
By inserting the solutions specified by Eq. (68) into Eq. (95), the solutions retrieved are;
Class:1 When \(\vartheta ^2_1-\vartheta _2\vartheta _3<0\) and \(\vartheta _3\ne 0\)
Class:2 When \(\vartheta _1^2+\vartheta _2\vartheta _3>0\) and \(\vartheta _3\ne 0\)
Class:3 When \(\vartheta _1^2+\vartheta _2\vartheta _3>0\) and \(\vartheta _3\ne 0\) and \(\vartheta _3\ne -\vartheta _2\)
Class: 4 When \(\vartheta _1^2+\vartheta _2\vartheta _3<0\), \(\vartheta _3\ne 0\) and \(\vartheta _3\ne -\vartheta _2\)
Class: 5 When \(\vartheta _1^2-\vartheta _2^2<0\) and \(\vartheta _3\ne -\vartheta _2\)
Class: 6 When \(\vartheta _1^2-\vartheta _2^2>0\) and \(\vartheta _3\ne -\vartheta _2\)
Class: 7 When \(\vartheta _2\vartheta _3>0\), \(\vartheta _3\ne 0\) and \(\vartheta _1=0\)
Class: 8 When \(\vartheta _1=0\) and \(\vartheta _2=-\vartheta _3\)
Class: 9 When \(\vartheta _1^2=\vartheta _2\vartheta _3\)
Class: 10 When \(\vartheta _1=k\), \(\vartheta _2=2k\) and \(\vartheta _3=0\)
Class: 11 When \(\vartheta _1=k\), \(\vartheta _3=2k\) and \(\vartheta _2=0\)
Class: 12 When \(2\vartheta _1=\vartheta _2+\vartheta _3\)
Class: 13 When \(-2\vartheta _1=\vartheta _2+\vartheta _3\)
Class: 14 When \(\vartheta _2=0\)
Class: 15 When \(\vartheta _2=\vartheta _1=\vartheta _3\ne 0\)
Class: 16 When \(\vartheta _2=\vartheta _3\), \(\vartheta _1=0\)
Class: 17 When \(\vartheta _3=0\)
where in all above cases \(\sigma = t-z\).
Physical nature of the obtained solutions
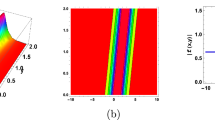
In this section, we delve into the solitonic characteristics of the obtained solutions. Mathematica simulations are employed to identify some recognized structures for the DNA Eq. (1). Figure 1 illustrates the nature of the invariant solution. The periodic solution \(u_{1}\) is depicted in Fig. 2. The dynamics of the optical dark soliton solutions \(u_{13}\) are explored and presented in Fig. 3. The singular solution \(u_{14}\) is also showcased in Fig. 4. The exponential and rational nature of the obtained solutions is illustrated in Figs. 5 and 6, respectively.

Polynomial nature of displacement in DNA using the invariant solution (51) with \(c_1=c_2=1,~\alpha =1,~\gamma =1\) and at t=1,2,3.

Periodic nature of displacement in DNA using \(u_1\) with \(\vartheta _1=\vartheta _3=1,~\vartheta _2=2,~b_0=1,~\Gamma _1=\Gamma _2=\Gamma _3=1,~\alpha =\gamma =1\) and at t=0,1,2.

Optical dark soliton nature of displacement in DNA using \(u_{13}\) with \(\vartheta _1=0,~\vartheta _2=1,~\vartheta _3=1,~b_0=1,~\Gamma _1=\Gamma _2=\Gamma _3=1,~\alpha =2,~\gamma =1\) and at t=0.1,0.2,0.3.

Singular nature of displacement in DNA using \(u_{14}\) with \(\vartheta _1=0,~\vartheta _2=1,~\vartheta _3=1,~b_0=1,~\Gamma _1=\Gamma _2=\Gamma _3=1,~\alpha =2,~\gamma =1\) and at t=0.2,0.4,0.6.

Exponential nature of displacement in DNA using \(u_{17}\) with \(k=1,~\vartheta _1=1,~\vartheta _2=2,~\vartheta _3=0,~b_0=1,~\Gamma _1=\Gamma _2=\Gamma _3=1,~\alpha =2,~\gamma =1\) and at t=0,1,2.

Rational nature of displacement in DNA using \(u_{18}\) with \(k=1,~\vartheta _1=1,~\vartheta _2=2,~\vartheta _3=0,~b_0=1,~\Gamma _1=\Gamma _2=\Gamma _3=1,~\alpha =2,~\gamma =1\) and at t=0,1,2.
Discussion and conclusions
We have successfully applied the Lie group method to characterize the properties of DNA molecules, specifically addressing the nonlinear dynamics described by Eq. (1). The symmetry algebra for this DNA equation was obtained, and the resulting invariant solutions have been documented. To the best of our knowledge, this study marks the first application of the Lie group method to the dynamics of DNA. The variable u(z, t) in our model represents the difference in longitudinal displacements between the bottom and top strands1,2,3. We have uncovered several intriguing solutions to the nonlinear dynamics of DNA, considering a model consisting of two long elastic homogeneous strands connected by an elastic membrane. This investigation focuses on the longitudinal motions2. Therefore, the invariant solutions and the solutions \(u_1\) through \(u_{24}\) are interpreted as new positions of longitudinal displacements of the strands. Additionally, corresponding simulations are presented in Figs. 1, 2, 3, 4, 5 and 6. Our study contributes novel positions not previously documented in Refs.1,12,13,14,15.
The interplay of both invariant and waveform solutions governed the longitudinal displacement in DNA, providing insights into the unique characteristics of DNA as a significant real-world challenge. The interactions between DNA and an external microwave field were expressed through various mathematical forms, encompassing rational, exponential, trigonometric, hyperbolic, polynomial, and other functions. Mathematica simulations corroborate these diverse solutions, showcasing longitudinal displacements in DNA as periodic waves, optical dark solitons, singular solutions, exponential forms, and rational forms. This groundbreaking study represents the inaugural application of the Lie group method to explore the interaction of DNA molecules. The findings present novel contributions that have not been reported in the existing literature. The success of this study inspires us to continue utilizing the Lie group method in our future research endeavors.
Data availability
All data generated or analyzed during this study are included in this published article.
References
De-Xing, Kong, Sen-Yue, Lou & Jin, Zeng. Nonlinear dynamics in a new double chain-model of DNA. Commun. Theor. Phys. 36(6), 737 (2001).
Webb, S. J. & Booth, A. D. Absorption of microwaves by microorganisms. Nature 222(5199), 1199–1200 (1969).
Swicord, Mays L. & Davis, C. C. Microwave absorption of DNA between 8 and 12 GHz. Biopolym. Orig. Res. Biomol. 21(12), 2453–2460 (1982).
Swicord, Mays L. & Davis, Christopher C. An optical method for investigating the microwave absorption characteristics of DNA and other biomolecules in solution. Bioelectromagn. J. Bioelectromagn. Soc. Soc. Phys. Regul. Biol. Med. Eur. Bioelectromagn. Assoc. 4(1), 21–42 (1983).
Gabriel, C. et al. Microwave absorption in aqueous solutions of DNA. Nature 328(6126), 145–146 (1987).
Yakushevich, Ludmila V. Nonlinear Physics of DNA (Wiley, 2006).
Bixon, M. & Jortner, Joshua. Energetic control and kinetics of hole migration in DNA. J. Phys. Chem. B 104(16), 3906–3913 (2000).
Henderson, P. T., Jones, D., Hampikian, G., Kan, Y. & Schuster, G. B. Long-distance charge transport in duplex DNA: The phonon-assisted polaron-like hopping mechanism. Proc. Natl. Acad. Sci. 96(15), 8353–8358 (1999).
Bruinsma, Robijn, Gruner, G., Dorsogna, M. R. & Rudnick, J. Fluctuation-facilitated charge migration along DNA. Phys. Rev. Lett. 85(20), 4393 (2000).
Van Zandt, L. L. Resonant microwave absorption by dissolved DNA. Phys. Rev. Lett. 57(16), 2085 (1986).
Van Zandt, L. L. & Davis, M. E. Theory of the anomalous resonant absorption of DNA at microwave frequencies. J. Biomol. Struct. Dyn. 3(5), 1045–1053 (1986).
Muto, V., Scott, A. C. & Christiansen, P. L. Microwave and thermal generation of solitons in DNA. Le J. Phys. Coll. 50, C3-217 (1989).
Muto, V., Halding, J., Christiansen, P. L. & Scott, A. C. Solitons in DNA. J. Biomol. Struct. Dyn. 5(4), 873–894 (1988).
Zhang, Chun-Ting. Harmonic and subharmonic resonances of microwave absorption in DNA. Phys. Rev. A 40(4), 2148 (1989).
Alka, W., Goyal, Amit & Nagaraja Kumar, C. Nonlinear dynamics of DNA-Riccati generalized solitary wave solutions. Phys. Lett. A 375(3), 480–483 (2011).
Abdelrahman, M. A. E., Zahran, E. H. M. & Khater, M. M. A. The Exp \((-\phi (\xi ))\)-expansion method and its application for solving nonlinear evolution equations. Int. J. Mod. Nonlinear Theory Appl. 4(01), 37 (2015).
Hussain, A., Usman, M., Zaman, F. D. & Almalki, Yahya. Lie group analysis for obtaining the abundant group invariant solutions and dynamics of solitons for the Lonngren-wave equation. Chin. J. Phys. 86, 447–457 (2023).
Usman, M., Hussain, A., Zidan, A. M. & Mohamed, A. Invariance properties of the microstrain wave equation arising in microstructured solids. Results Phys. 58, 107458. https://doi.org/10.1016/j.rinp.2024.107458 (2024).
Ovsiannikov, Lev Vasil’evich. Group Analysis of Differential Equations (Academic Press, 2014).
Ibragimov, Nail H. CRC Handbook of Lie Group Analysis of Differential Equations Vol. 3 (CRC Press, 1995).
Bluman, G. W. Applications of Symmetry Methods to Partial Differential Equations (Springer, 2010).
Olver, P. J. Applications of Lie groups to Differential Equations (Springer Science & Business Media, 1993).
Usman, M., Hussain, A. & Zaman, F. D. Lie group analysis, solitons, self-adjointness and conservation laws of the nonlinear elastic structural element equation. J. Taibah Univ. Sci. 18(1), 2294554 (2023).
Al-Omari, S. M., Hussain, A., Usman, M. & Zaman, F. D. Invariance analysis and closed-form solutions for the beam equation in Timoshenko model. Malays. J. Math. Sci. 17(4), 587–610 (2023).
Hussain, A. et al. Symmetry analysis for the (3+1)-dimensional generalized nonlinear evolution equation arising in the shallow water waves. Alex. Eng. J. 85, 9–18 (2023).
Usman, M., Hussain, A., Zaman, F. D., Ibeas, A. & Almalki, Y. Integrability Properties of the Slepyan-Palmov Model Arising in the Slepyan-Palmov Medium’. Mathematics 11(21), 4545 (2023).
Akhtar, Hussain, Kara, A. H. & Zaman, F. D. New exact solutions of the Thomas equation using symmetry transformations. Int. J. Appl. Comput. Math. 9(5), 106 (2023).
Hussain, A., Kara, A. H. & Zaman, F. D. Symmetries, associated first integrals and successive reduction of Schrödinger type and other second order difference equations. Optik 287, 171080 (2023).
Yadav, Shalini & Arora, Rajan. Lie symmetry analysis, optimal system and invariant solutions of (3+ 1)-dimensional nonlinear wave equation in liquid with gas bubbles. Eur. Phys. J. Plus 136, 1–25 (2021).
Devi, Munesh, Yadav, Shalini & Arora, Rajan. Optimal system, invariance analysis of fourth-Order nonlinear Ablowitz-Kaup-Newell-Segur water wave dynamical equation using Lie symmetry approach. Appl. Math. Comput. 404, 126230 (2021).
Yadav, Shalini, Chauhan, Astha & Arora, Rajan. Invariance analysis, optimal system and conservation laws of (2+ 1)(2+ 1)-dimensional non-linear Vakhnenko equation. Pramana 95, 1–13 (2021).
Kumar, Sachin & Dhiman, Shubham Kumar. Exploring cone-shaped solitons, breather, and lump-forms solutions using the Lie symmetry method and unified approach to a coupled breaking soliton model. Phys. Scr. 99(2), 025243 (2024).
Kumar, Sachin, Kumar, Dharmendra & Kumar, Amit. Lie symmetry analysis for obtaining the abundant exact solutions, optimal system and dynamics of solitons for a higher-dimensional Fokas equation. Chaos Solitons Fractals 142, 110507 (2021).
Kumar, Sachin, Ma, Wen-Xiu. & Kumar, Amit. Lie symmetries, optimal system and group-invariant solutions of the (3+ 1)-dimensional generalized KP equation. Chin. J. Phys. 69, 1–23 (2021).
Kumar, Sachin, Ma, Wen-Xiu., Dhiman, Shubham Kumar & Chauhan, Astha. Lie group analysis with the optimal system, generalized invariant solutions, and an enormous variety of different wave profiles for the higher-dimensional modified dispersive water wave system of equations. Eur. Phys. J. Plus 138(5), 434 (2023).
Usman, Muhammad, Hussain, Akhtar & Zaman, F. D. Invariance and Ibragimov approach with Lie algebra of a nonlinear coupled elastic wave system. Part. Diff. Equ. Appl. Math. 9(2), 100640 (2024).
Abbas, Naseem et al. A discussion on the Lie symmetry analysis, travelling wave solutions and conservation laws of new generalized stochastic potential-KdV equation. Results Phys. 56, 107302 (2024).
Usman, M., Hussain, A. & Zaman, F. D. Invariance analysis of thermophoretic motion equation depicting the wrinkle propagation in substrate-supported Graphene sheets. Phys. Scr. 98(9), 095205 (2023).
Acknowledgements
The authors extend their appreciation to the Deanship of Scientific Research at King Khalid University for funding this work through large group Research Project under grant number RGP.2/16/45 also the authors are thankful to the Deanship of Graduate Studies and Scientific Research at University of Bisha for supporting this work through the Fast-Track Research Support Program.
Author information
Authors and Affiliations
Contributions
Writing original draft, Akhtar Hussain and Muhammad Usman; Writing review and editing, Akhtar Hussain., Muhammad Usman, Saud Owyed, and Ahmed M. Zidan; Methodology, Muhammad Usman, Akhtar Hussain, Ahmed M. Zidan and Ariana Abdul Rahimzai; Software, Akhtar Hussain and Muhammad Usman; Supervision, Ahmed M. Zidan and Ariana Abdul Rahimzai; Project administration, Ariana Abdul Rahimzai; Visualization, Akhtar Hussain, Muhammad Usman, and Ahmed M. Zidan; Conceptualization, Akhtar Hussain, Muhammad Usman, and Ariana Abdul Rahimzai; Formal analysis, Ariana Abdul Rahimzai, and Akhtar Hussain; Revision, updating the manuscript, responding to reviewers, and validation of the results, Saud Owyed and Mohammed Sallah.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Hussain, A., Usman, M., Zidan, A.M. et al. Dynamics of invariant solutions of the DNA model using Lie symmetry approach. Sci Rep 14, 11920 (2024). https://doi.org/10.1038/s41598-024-59983-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-59983-8
Keywords
This article is cited by
-
Lie symmetry analysis and conservation laws of Kaup–Broer system for capillary waves
Arabian Journal of Mathematics (2025)
-
Invariant solutions, lie symmetry analysis, bifurcations and nonlinear dynamics of the Kraenkel-Manna-Merle system with and without damping effect
Scientific Reports (2024)
