
Abstract
Accurately predicting the state of health (SOH) of lithium-ion batteries is fundamental in estimating their remaining lifespan. Various parameters such as voltage, current, and temperature significantly influence the battery’s SOH. However, existing data-driven methods necessitate substantial data from the target domain for training, which hampers the assessment of lithium-ion battery health at the initial stage. To address these challenges, this paper introduces the multi-head attention-time convolution network (MHAT-TCN), amalgamating multi-head attention learning with random block dropout techniques. Additionally, it employs grey relational analysis (GRA) to select health indicators (HIs) highly correlated with battery capacity, thereby enhancing the accuracy of the model training. Employing leave-one-out crossvalidation (LOOCV), the MHAT-TCN network is pre-trained using data from batteries of the same model to facilitate comprehensive prediction of the target battery throughout its operational period. Results demonstrate that the MHAT-TCN network trained on HIs outperforms other models, enabling precise predictions across the entire operational period.
Similar content being viewed by others
Introduction
As the global demand for sustainable and clean energy continues to surge, ensuring the stability and reliability of power supply becomes increasingly paramount, emphasizing the growing significance of energy storage systems1,2,3,4,5. Compared to traditional storage methods such as pumped hydro and compressed air energy storage, lithium-ion batteries6,7 offer high energy density, modular design, high energy conversion efficiency, and rapid response time. Therefore, lithium-ion batteries have become one of the preferred options for battery energy storage systems8,9,10,11. The degradation of lithium-ion batteries is a complex process influenced by various factors, including operational conditions, design, and chemical composition. Over time, these factors contribute to the decline in battery capacity, power, and overall performance12,13,14. Managing the health of lithium-ion batteries is challenging due to the intricacy of these degradation processes and the interdependency among various factors. Given the complexity of battery degradation mechanisms, advanced modeling techniques are required to capture and predict the health status of lithium-ion batteries15,16,17,18.
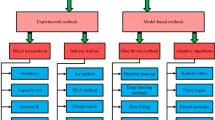
The state of health (SOH) of a power battery pack is a crucially monitored metric, reflecting the storage capacity of the battery during use19,20,21,22. Presently, methods for evaluating SOH in power batteries primarily encompass model-based methods and data-driven methods23,24. Model-based approaches consist of electrochemical models like empirical degradation models and equivalent circuit models. Electrochemical models, established on physicochemical principles, accurately predict vital parameters such as state of charge (SOC) and SOH by modeling the electrochemical processes within the battery. Ashwin25 considered the impact of porosity variation on lithium-ion battery performance, thereby developing an electrochemical mechanistic model. Torai26 proposed a model expressing the capacity fade characteristics of \({\textrm{LiFePO}}_{4}\)-graphite batteries for SOH prediction. However, due to their expensive nature, these models face challenges in widespread application. Empirical models, on the other hand, are constructed based on existing battery test data, employing techniques like regression analysis for parameter estimation. Han27, leveraging cyclic life experiment results and identified battery aging mechanisms, used a genetic algorithm to construct and fit a battery cycle life model. Despite their simplicity in modeling, empirical models suffer from limited accuracy and poor robustness. Equivalent circuit models conceptualize a battery as an equivalent circuit comprising a capacitor and resistor in parallel, utilizing predetermined parameters (e.g., capacitance, nominal capacity) to depict battery characteristics. For instance, Mao28 established a two-RC equivalent circuit model, employing FFRLS and Unscented Kalman Filter (UKF) algorithms to derive SOC. However, owing to the intricate physical and chemical processes within batteries, the resultant physical models tend to be complex. Multiple parameters such as chargedischarge currents, voltage, temperature significantly impact battery performance. Moreover, these models are greatly influenced by structural factors, necessitating intricate model development.
With the accumulation of extensive data and the development of data analysis techniques, data-driven methods have gradually found application in the design of battery estimation models. These methods do not rely on understanding the internal structure or related knowledge of batteries. Instead, they solely depend on copious data to establish an accurate estimation model, thus reducing the complexity and workload of modeling. Xue29 proposed a progressive training framework integrated with deep convolutional neural networks (DCNN) to construct an online capacity estimator. Li30 optimized the Temporal Convolutional Network (TCN) parameters using the Particle Swarm Optimization (PSO) algorithm, allowing the model to adapt to lithiumion battery behaviors across different temperatures. Yang31 proposed an approach employing long short-term memory (LSTM) algorithm coupled with Kalman filtering to eliminate noise, yet often overlooking the influence of other factors. Health indicatorbased methods present a more comprehensive approach, considering multiple influencing factors such as current, voltage, and temperature. Ma32 selected the inflection points of the battery capacity degradation curve as health indicators (HI), while Chen33 utilized equal voltage rise intervals as a health indicator; however, singular health indicators struggle to comprehensively track battery degradation. Xue34 proposed using sample entropy of discharge voltage as health indicator; Li35 employed the difference in discharge curve isochronous time as HI; Yang36 achieved highly accurate SOH monitoring based on the continuous current (CC) mode duration, continuous voltage (CV) model duration, slope at the end of CC charging model, and the vertical slope of \({\textrm{CC}}\) charging curve. Additionally, while employing data-driven methods, reliance on a large volume of training data is essential. Therefore, it is necessary to explore the utilization of datasets from batteries of similar types but different models to train network models for predicting target data.
Accurate prediction of battery health is crucial for enhancing the lifespan and efficiency of lithium-ion batteries, which is significant for advancing renewable energy solutions. Although recurrent neural networks (RNNs) and hybrid models have been widely utilized, they often face limitations when dealing with the complex, nonlinear dynamics of battery health. This study employs a TCN model37, incorporating recent advances in convolutional architectures from other fields to improve the model, offering a more precise and robust method for predicting battery SOH. This model is designed to use battery charge-discharge data as indicators for predicting the SOH of lithium-ion batteries. Through extensive experiments and analysis, we observed that the model, when utilizing HIs as inputs, is capable of capturing local regeneration phenomena. This demonstrates enhanced accuracy and robustness in SOH prediction compared to other baseline models.
The main contributions of this study are delineated across the following three dimensions:
-
(a)
We apply grey relational analysis to identify the key health indicators directly influencing battery capacity. The robustness of the model is significantly enhanced by training the neural network with multiple input parameters.
-
(b)
An improved version of the MHAT-TCN neural network is proposed, incorporating multi-head attention learning and DropBlock technology. This enhancement significantly increases the accuracy of predicting the health status of batteries.
-
(c)
This approach utilizes the Leave-One-Out cross-validation technique for training on a diversified dataset of battery models. This method effectively enhances the precision of target data prediction.
The remainder of this paper is organized as follows: Section “Methodology” introduces the basic structure of the TCN model and the algorithms utilized in this study. Section “The LIB dataset” entails the analysis of the lithium-ion battery dataset. Section “Prediction results” presents the examination conducted on our model. The final section, “Conclusion”, encapsulates the conclusions drawn from this research.
Methodology
Prediction workflow
The proposed workflow for the MHAT-TCN network’s SOH prediction method, based on the introduced HIs input, is illustrated in Fig. 1. This workflow encompasses the dataset processing phase and the model training-prediction phase. In the dataset processing phase, prioritization is given to selecting health indicators with a higher correlation to SOH, ensuring these chosen health indicators adequately reflect the actual SOH of the battery while minimizing the influence from the battery’s external operational environment and inherent conditions as much as possible. Subsequently, the selected health indicators are combined with the battery dataset. The dataset is then partitioned based on typical prediction patterns and leave-one-out cross-validation (LOOCV) mode. Finally, the improved MHAT-TCN network is introduced for training, ultimately achieving the prediction of the lithium-ion battery’s health status.

Research Methodology Process.
TCN network
The TCN comprises causal convolutions, dilated convolutions, and residual connections. It exhibits characteristics such as parallelism, causality, and flexible receptive fields, rendering it suitable for handling time-series data. Figure 2 depicts a schematic of the one-dimensional causal dilated convolution within the TCN.

The illustration of 1-D convolution.
For a specific one-dimensional input sequence \(x \in R^{n}\) and its filter \(f:\{0, \ldots ,-1\} \rightarrow R\), the unfolded convolution operation F on sequence elements \({\textrm{s}}\) is defined as:
where d represents the dilation factor and k denotes the filter size, \(s-d i\) refers to the past. Hence, dilation introduces a fixed step between every two adjacent filters. When \(d=1\), the unfolded convolution reduces to regular convolution. Employing larger dilation enables the top layer’s output to represent a larger input range, effectively expanding the receptive field of the convolutional neural network.
The length of time series modeled by traditional convolutional neural networks is constrained by the size of the convolutional kernels and the depth of the network structure. To handle longer and more complex time series data, it is necessary to linearly stack more layers. In the n-layer structure of a standard convolutional network, if the size of the filter is k, the size of the computed RF (receptive field) is:
By introducing an extended convolutional structure, the relationship between the receptive field of the neural network and the number of hidden layers changes from linear to exponential. As a result, the model can obtain a larger receptive field while maintaining a relatively shallow network depth, which facilitates optimization and convergence. The formula for the receptive field y is expressed as follows:
where n represents the number of hidden layers, k represents the size of the convolutional kernel, and \(d_{n}\) represents the dilation factor for the nth hidden layer, calculated as \(d_{n}=2^{n-1}\). Figure 2 illustrates a dilated convolutional network with 3 layers, showing a significant increase in the size of the receptive field as the number of network layers increases.
To enable the temporal feature output to consider longer historical sequence information, this study employs a universal residual module in the TCN module, replacing the convolutional layers.
Residual connections originate from the Residual Network (ResNet). The specific formula is as follows:
The residual block of TCN is depicted in Fig. 3. Within this block, TCN comprises two layers of dilated causal convolutions and nonlinear mappings. The ReLU activation function is utilized. To enhance dropout effectiveness, DropBlock is employed instead of Dropout.

Residual connection structure.
Multi-head attention mechanism
The multi-head attention mechanism is a neural network structure widely used in tasks such as natural language processing and machine translation. It is an extended form based on the attention mechanism. The multi-head attention mechanism operates multiple attention mechanisms in parallel to better capture relevant information within the input sequence.
The basic formulation of the multi-head attention mechanism can be described in several steps. Initially, the input vector \({\textrm{x}}\) undergoes linear transformations to generate three distinct vectors: query (Q), key (K), and value (V) :
where \(W^{Q}, W^{K}\), and \(W^{V}\) are trainable weight matrices. Attention scores are computed by taking the dot product of the query vector Q and key vector K, which is then scaled by the factor \(d_{k}\) to prevent gradient vanishing or explosion due to the high dimensionality involved in the dot product calculation. This process is divided into multiple heads, each employing distinct \(W^{Q}, W^{K}\), and \(W^{V}\) matrices to independently perform the calculations. The output vectors from all heads are then concatenated and further processed through another linear transformation:
This structure enables the model to learn information in parallel across different representational subspaces, thereby capturing the complex patterns and diversity present in the data.
Grey relational analysis
During the selection and screening process of battery health indicators, the objective is to ensure that the chosen health indicators adequately reflect the actual SOH of the battery, while minimizing the influences of external working conditions and internal operational factors on these health indicators. To achieve this objective, Grey Relational Analysis (GRA) was employed. GRA, based on the theory of grey systems, assesses the degree of correlation among factors by evaluating the similarity of data sequence curves for each factor. Its calculation formula is presented as follows:
In the equation, \(x_{i}(k)\) denotes the data for the i-th health indicator before and after normalization during the kth cycle. \(\rho \) represents the resolution coefficient, which ranges from [0, 1], and in this study, it is set to 0.5 . The relational coefficient \(\zeta _{i}(k)\) represents the degree of similarity between the k-th data of the comparative sequence \(x_{i}(k)\) and the reference sequence \(x_{0}(k)\), reflecting the degree of influence exerted by the sequence on the system’s behavior. The range of r is [0, 1]. A higher r value approaching 1 indicates a stronger correlation between the comparative sequence and the reference sequence.
Leave-one-out cross-validation
The cross-validation technique allows for obtaining relatively stable error metrics under the condition of fixed samples, aiming to minimize the random fluctuations in testing errors caused by the random selection of training and testing sets. This ensures replicability in the experimental process. Cross-validation takes various forms, including Holdout cross-validation, K-fold cross-validation, and Leave-One-Out crossvalidation LOOCV.
LOOCV is a commonly employed method, particularly advantageous for cases with limited data volumes. It systematically evaluates model performance through an iterative process, where each sample is consecutively designated as the validation set, while all other samples are used for training. For a dataset comprising \({\textrm{N}}\) samples, the LOOCV procedure is conducted \({\textrm{N}}\) times. In each iteration, one sample is selected as the test set and the remaining \({\textrm{N}}-1\) samples form the training set. The model is trained on the \({\textrm{N}}-1\) samples and subsequently tested on the single isolated test sample. The error from each test on the single sample is recorded after testing. Due to the small sample sizes involved in battery SOH prediction, LOOCV exhibits unique advantages in optimizing predictions for small datasets. Therefore, we have selected LOOCV as the optimization algorithm for battery SOH prediction.
The LIB dataset
Lithium-ion battery aging data analysis
The degradation dataset of lithium-ion batteries used in the experiment is sourced from the publicly available dataset of CALCE batteries at the University of Maryland in the United States. This dataset comprises four sets of similar batteries (CS2-35, CS2-36, CS2-37, CS2-38) evaluated under standardized constant current/constant voltage protocols within identical experimental conditions. The specific battery information is outlined in Table 1.
The battery has a rated voltage of \(4.2 \mathrm {~V}\) and a rated capacity of \(1.1\, \text{Ah}\). The charging and discharging process is as follows: In the charging phase, the initial stage involves constant current charging at \(0.55 \mathrm {~A}(0.5 {\textrm{C}})\) until the voltage reaches \(4.2 \mathrm {~V}\). Subsequently, the second stage maintains a constant voltage of \(4.2 \mathrm {~V}\) until the charging current decreases to \(50 \mathrm {~mA}\), at which point the charging process is terminated. During the discharging phase, the battery cycles at a discharge current of \(1.1 \mathrm {~A}(1 {\textrm{C}})\), and the cutoff voltage in the discharging state is set at \(2.7 \mathrm {~V}\).
The actual value of the lithium-ion battery’s capacity per cycle is calculated using the ampere-hour integration method, as depicted in the following formula:
The formula is as follows: t represents discharge time, i stands for discharge current, and C denotes the true value of lithium-ion battery capacity. The data collected during the battery charging and discharging processes in the dataset are discrete, thereby necessitating the conversion of the integration process into cumulative summation. The formula is as follows:

Capacity degradation curve of CALCE batteries.
The degradation curve of battery capacity over charge and discharge cycles is depicted in Fig. 4. In the cyclic utilization of lithium batteries, the capacity regeneration phenomenon exhibits periodic characteristics. Therefore, a comprehensive analysis, considering multiple factors, is required to study and understand this phenomenon.
Health indicator screening
In the selection and screening process of battery health indicators, the objective is to ensure that the chosen indicators adequately reflect the actual SOH of the battery, while minimizing the impact of both external working conditions and the battery’s own operational states on these indicators. To achieve this goal, the following screening methods were employed, ultimately selecting HI1 and HI3 as descriptors of the battery’s degradation status.
Initially, indicators closely associated with battery SOH, such as voltage, current, and temperature, are considered. These indicators play significant roles during the battery’s charging and discharging processes, prompting the selection of health indicators exhibiting higher correlation with SOH. It is crucial to ensure that the chosen health indicators can effectively reflect the genuine SOH of the battery and minimize the effects arising from external working conditions and the battery’s inherent operational states. The \(\tau \)-th HI series can be described as follows:
Retrieve and preprocess voltage and current measurements obtained during each charge-discharge cycle. Designate the constant current charging time as HI1 (Constant Current Charging Time), the constant voltage charging time as HI2 (Constant Voltage Charging Time), and the battery terminal voltage transition rate as HI3 (DV/DT). The formulas for the selected \({\textrm{HI}}\) indices are presented as Table 2:
Taking the CS2_36 battery as an example, indirect HI data and battery capacity curves are depicted in Fig. 5. For the same battery across different cycles, the CC and CV times vary, and the terminal voltage change rate gradually diminishes with increasing cycle count. This demonstrates the correlation between lithium-ion battery voltage-current data and battery degradation behavior. The fluctuation in these health indicators encompasses crucial information regarding the battery degradation process.
The grey relational analysis method was employed to evaluate the correlation between the extracted feature parameters from the aforementioned charging and discharging processes and the SOH. Results from Table 3 indicate that the parameter most strongly correlated with battery capacity is the battery constant current charging time (HI1), followed by the battery terminal voltage variation rate (HI3). This suggests a substantial correlation between HI1 and HI3 with the battery’s SOH, thereby identifying them as the most effective indicators for describing the battery’s degradation state. HI1 reflects the charging performance of the battery under high-current charging conditions, which significantly impacts the aging and degradation status of the battery. On the other hand, HI3 represents the voltage variation rate during the charging and discharging processes, offering insights into the battery’s internal state, including factors like internal resistance, thus also being correlated with SOH.

\({\textrm{HI}}\) and lithium-ion battery capacity curve.
Prediction results
This study primarily validates the predictive performance of the model through several aspects: (1) Validation of the predictive outcomes of MHAT-TCN(m) trained with HIs under different training set partitions. It compares the predictive efficacy of single-dimensional input and multidimensional input in forecasting the actual health status of batteries. (2) Comparative assessment with existing models using LOOCV to validate the performance of MHAT-TCN(m) trained with HIs in monitoring SOH and capturing local regeneration phenomena. The experimental analysis models in this study were coded in Python 3.9.13 and executed on a desktop computer with the following specifications: CPU-i5-2600K, GPU-Nvidia 3060Ti.
Evaluation metrics
Evaluation of the proposed approach’s effectiveness in lithium-ion battery health status detection involved selecting performance evaluation metrics: Mean Absolute Error (MAE), Mean Squared Error (MSE), Root Mean Squared Error (RMSE), Mean Absolute Percentage Error (MAPE), and the model determination coefficient \(R^{2}\). These metrics provide a comprehensive assessment of the model’s performance, reflecting the degree of difference between predicted results and actual values. Smaller values for evaluation metrics MAE, MSE, RMSE, and MAPE indicate lesser differences between predicted results and actual values, signifying better model performance. \(R^{2}\) measures the extent to which the predictive model explains the variation in observed data, ranging from 0 to 1 . As \(R^{2}\) approaches 1 , it indicates the model’s adeptness at explaining the variability in observed data. The formulas for MSE, RMSE, MAE, MAPE, and \(R^{2}\) are expressed as follows:
In Eqs. (14), (15), (16), (17), and (18), \(y_{i}, {\hat{y}}_{i}\), and \({\bar{y}}_{i}\) represent the actual, estimated, and mean values of capacity during the i-th charge and discharge cycle, respectively.
Predictive results under HIs training model
In this section, the predictive performance of MHAT-TCN(m) will be verified through a multi-input training model based on the HIs obtained in section “Health indicator screening”. Considering that the degradation trends of the four types of batteries, CS2_35, 36, 37, and 38 , are roughly similar, the analysis in this section will focus on the predictive results of CS2_36. Simultaneously, we set the first 200, 400, 600, and 800 cycles as the training sets to predict the entire battery capacity degradation, aiming to analyze the predictive effectiveness of the model. To ensure fairness, the same basic model parameters were adopted, and a global prediction of the entire battery capacity degradation process was conducted. The model parameters are as shown in Table 4.
The predicted curves obtained under these parameter settings are illustrated in Fig. 6.

The prediction results of battery CS2-36 under different architectures.
Figure 6 illustrates the predictive outcomes under different test sets. In this representation, MHAT-TCN denotes a model trained solely on SOH input, while MHAT-TCN(m) represents a model trained with both HIs and SOH inputs. The figure reveals that under scenarios with limited test sets, MHAT-TCN exhibited less than optimal predictive performance, demonstrating significant fluctuations in predicted values. This outcome stems from inadequate model training due to insufficient training data, leading to decreased predictive capabilities. In contrast, MHAT-TCN(m) closely approximated the true load data curve, showcasing a better fit to the overall degradation trend of the capacity sequence in an equivalent number of cycles. Moreover, it effectively captured local regeneration phenomena.
Table 5 presents the predictive indices of various algorithms at different prediction starting points. Under varying training set configurations, the TCN demonstrated the lowest prediction accuracy. For instance, with the CS2_36 battery and a training set of 200 cycles, the RMSE using TCN for feature extraction and prediction was 0.0455 , and the MAPE was 6.0991 . The inclusion of a multi-head attention mechanism in MHATTCN resulted in enhanced predictive performance, yielding an RMSE of 0.0385 and a MAPE of 4.6902. However, the MHAT-TCN(m), which utilized manually extracted HIs for training, showed the highest accuracy in SOH prediction, with an RMSE of 0.0262 and a MAPE of 3.6990. Compared to TCN trained with a single input, this approach resulted in a \(42.42 \%\) reduction in RMSE and a \(39.35 \%\) decrease in MAPE. These results indicate that MHAT- \({\textrm{TCN}}({\textrm{m}})\) trained on HIs can extract more relevant features associated with SOH, thus improving its predictive capability.
The prediction results based on LOOCV
LOOCV stands as a commonly employed cross-validation method, particularly advantageous in scenarios with limited data volume. It systematically evaluates model performance by consecutively designating each sample as the validation set while utilizing all other samples for training. In this study, even with a higher number of iterations, validating the model demonstrated commendable predictive accuracy. Table 6 illustrates the data partitioning rules, wherein the model inputs consist of multidimensional parameter inputs.
Table 7 displays the predictive results across the entire duration based on LOOCV for different algorithms. Taking the results from Dataset 4 as an example, TCN, GRU, and LSTM models exhibit RMSE and MAPE values of ( 0.0254, 2.1362 ), (0.0207, 2.2425), and (0.0224, 2.4834) respectively. Notably, the MHAT-TCN(m) model trained with HIs demonstrates superior metrics compared to the other three models, with an RMSE of 0.0171 and MAPE of 1.6818, both lower than those of the other three models. Considering a comprehensive evaluation of the assessment metrics, the proposed MHAT-TCN(m) trained with HIs exhibits a more stable predictive performance, surpassing individual TCN, GRU, and LSTM models across all metrics. Additionally, the application of LOOCV enables accurate predictions throughout the entire duration.

Battery capacity degradation curves based on LOOCV.
Figure 7 illustrates the predictive outcomes of various algorithms under LOOCV. A closer examination of the magnified segment in Fig. 7(b) reveals that within the 300 to 500 cycle range, MHAT-TCN(m) exhibits a more stable performance under LOOCV. All four battery models manifest multiple instances of capacity regeneration during cycles. TCN, LSTM, and GRU fail to accurately predict these capacity regeneration phenomena and display significant predictive fluctuations in the final cycle phases. Conversely, MHAT-TCN(m) effectively mitigates outliers, aligning its predictions more closely with actual values, thereby offering enhanced accuracy in estimating SOH for lithium-ion batteries. This improvement is attributed to the multi-head attention mechanism, operating multiple attention modules in parallel to better capture relevant information within the input sequences, thereby improving the predictive performance of the model.
Conclusion
This paper presents a lithium-ion battery SOH prediction method based on the MHAT-TCN neural network. Initially, health indicators were extracted from the chargedischarge data of the battery, and the correlation between these characteristic parameters and the battery capacity was validated through grey relational analysis. Training the MHAT-TCN(m) model with these health indicators significantly enhances SOH prediction accuracy. Considering the challenge in predicting SOH at the initial time periods, this study integrates LOOCV and employs pretraining of MHAT-TCN using similar battery type data. The results demonstrate that employing \({\textrm{HI}}\) in MHAT\({\textrm{TCN}}({\textrm{m}})\) training effectively improves predictive performance compared to MHATTCN trained with a single input, resulting in a \(31 \%\) decrease in RMSE and a \(21 \%\) decrease in MAPE. Furthermore, the integration of LOOCV enables MHAT-TCN(m) to accurately predict the initial trend of SOH for target battery models, effectively monitoring faults occurring during battery operation.
Moving forward, our future objective involves conducting cycle-life experiments on battery packs and extracting health indicators to accomplish a comprehensive estimation of battery pack SOH.
Data availability
The datasets used and analysed during the current study available from the corresponding author on reasonable request.
References
Liu, B. et al. Safety issues and mechanisms of lithium-ion battery cell upon mechanical abusive loading: A review. Energy Storage Mater. 24, 85–112 (2020).
Zheng, Y. et al. Thermal state monitoring of lithium-ion batteries: Progress, challenges, and opportunities. Prog. Energy Combust. Sci. 100, 101120 (2024).
Li, X., Yu, D., Byg, V. & Ioan, S. The development of machine learning-based remaining useful life prediction for lithium-ion batteries. J. Energy Chem. 82, 103–121 (2023).
Yang, Y. et al. An overview of application-oriented multifunctional large-scale stationary battery and hydrogen hybrid energy storage system. Energy Rev. 3, 100068 (2024).
Hannan, M. et al. Toward enhanced state of charge estimation of lithium-ion batteries using optimized machine learning techniques. Sci. Rep. 10, 4687 (2020).
Sadhukhan, C. et al. Modeling and simulation of high energy density lithium-ion battery for multiple fault detection. Sci. Rep. 12, 9800 (2022).
Ye, R. et al. Advanced sulfur-silicon full cell architecture for lithium-ion batteries. Sci. Rep. 7, 17264 (2017).
Birkl, C., Roberts, M., McTurk, E., Bruce, P. & Howey, D. Degradation diagnostics for lithium-ion cells. J. Power Sources 341, 373–386 (2017).
Fei, Z., Zhang, Z., Yang, F. & Tsui, K. Deep learning powered rapid lifetime classification of lithium-ion batteries. eTransportation 18, 100286 (2023).
Ruan, H. et al. Lithium-ion battery lifetime extension: A review of derating methods. J. Power Sources 563, 232805 (2023).
Hoque, M. et al. Data driven analysis of lithium-ion battery internal resistance towards reliable state of health prediction. J. Power Sources 513, 230519 (2021).
Li, C., Zhang, H., Ding, P., Yang, S. & Bai, Y. Deep feature extraction in lifetime prognostics of lithium-ion batteries: Advances, challenges and perspectives. Renew. Sustain. Energy Rev. 184, 113576 (2023).
Paffumi, E., De Gennaro, M. & Martini, G. In-vehicle battery capacity fade: A follow-up study on six European regions. Energy Rep. 11, 817–829 (2024).
Zhang, Z. et al. Study of the effects of preheating on discharge characteristics and capacity benefit of li-ion batteries in the cold. J. Energy Storage 86, 111228 (2024).
Mossali, E. et al. Lithium-ion batteries towards circular economy: A literature review of opportunities and issues of recycling treatments. J. Environ. Manag. 264, 110500 (2020).
Deutschen, T., Gasser, S., Schaller, M. & Siehr, J. Modeling the self-discharge by voltage decay of a NMC/graphite lithium-ion cell. J. Energy Storage 19, 113–119 (2018).
Semeraro, C., Caggiano, M., Olabi, A. & Dassisti, M. Battery monitoring and prognostics optimization techniques: Challenges and opportunities. Energy 255, 124538 (2022).
Fei, Z., Yang, F., Tsui, K., Li, L. & Zhang, Z. Early prediction of battery lifetime via a machine learning based framework. Energy 225, 120205 (2021).
Tang, A. et al. Data-physics-driven estimation of battery state of charge and capacity. Energy 294, 130776 (2024).
Severson, K. et al. Data-driven prediction of battery cycle life before capacity degradation. Nat. Energy 4, 383–391 (2019).
Zhang, D. et al. A multi-step fast charging-based battery capacity estimation framework of real-world electric vehicles. Energy 294, 130773 (2024).
Zhao, W., Ding, W., Zhang, S. & Zhang, Z. A deep learning approach incorporating attention mechanism and transfer learning for lithium-ion battery lifespan prediction. J. Energy Storage 75, 109647 (2024).
Hu, C., Youn, B. & Chung, J. A multiscale framework with extended Kalman filter for lithium-ion battery SOC and capacity estimation. Appl. Energy 92, 694–704 (2012).
Xing, J., Zhang, H. & Zhang, J. Remaining useful life prediction of—lithium batteries based on principal component analysis and improved gaussian process regression. Int. J. Electrochem. Sci. 18, 100048 (2023).
Ashwin, T., Chung, Y. & Wang, J. Capacity fade modelling of lithium-ion battery under cyclic loading conditions. J. Power Sources 328, 586–598 (2016).
Torai, S., Nakagomi, M., Yoshitake, S., Yamaguchi, S. & Oyama, N. State-of-health estimation of lifepo4/graphite batteries based on a model using differential capacity. J. Power Sources 306, 62–69 (2016).
Han, X., Ouyang, M., Lu, L. & Li, J. A comparative study of commercial lithium ion battery cycle life in electric vehicle: Capacity loss estimation. J. Power Sources 268, 658–669 (2014).
Mao, L., Hu, Q., Zhao, J. & Yu, X. State-of-charge of lithium-ion battery based on equivalent circuit model—relevance vector machine fusion model considering varying ambient temperatures. Measurement 221, 113487 (2023).
Xue, Q. et al. A flexible deep convolutional neural network coupled with progressive training framework for online capacity estimation of lithium-ion batteries. J. Clean. Prod. 397, 136575 (2023).
Li, F., Zuo, W., Zhou, K., Li, Q. & Huang, Y. State of charge estimation of lithium-ion batteries based on PSO-TCN-attention neural network. J. Energy Storage 84, 110806 (2024).
Yang, F., Zhang, S., Li, W. & Miao, Q. State-of-charge estimation of lithium-ion batteries using LSTM and UKF. Energy 201, 117664 (2020).
Ma, Y., Li, J., Gao, J. & Chen, H. State of health prediction of lithium-ion batteries under early partial data based on IWOA-BiLSTM with single feature. Energy 295, 131085 (2024).
Chen, S. et al. A novel state of health estimation method for lithium-ion batteries based on constant-voltage charging partial data and convolutional neural network. Energy 283, 129103 (2023).
Xue, Z., Zhang, Y., Cheng, C. & Ma, G. Remaining useful life prediction of lithium-ion batteries with adaptive unscented Kalman filter and optimized support vector regression. Neurocomputing 376, 95–102 (2020).
Li, Y., Zhong, S., Zhong, Q. & Shi, K. Lithium-ion battery state of health monitoring based on ensemble learning. IEEE Access 7, 8754–8762 (2019).
Yang, D., Zhang, X., Pan, R., Wang, Y. & Chen, Z. A novel gaussian process regression model for state-of-health estimation of lithium-ion battery using charging curve. J. Power Sources 384, 387–395 (2018).
Lin, Z., Li, D. & Zou, Y. Energy efficiency of lithium-ion batteries: Influential factors and long-term degradation. J Energy Storage 74, 109386 (2023).
Author information
Authors and Affiliations
Contributions
F.-M. Z.: Conceptualization of this study, Methodology, Software, Writing-original draft. D.-X.G.: Conceptualization, Data curation, Writing-review & editing. Y.-M.C.: Modification for the final layout. Q.Y.: Conceptualization.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhao, FM., Gao, DX., Cheng, YM. et al. Estimation of lithium-ion battery health state using MHATTCN network with multi-health indicators inputs. Sci Rep 14, 18391 (2024). https://doi.org/10.1038/s41598-024-69424-1
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-69424-1
Keywords
This article is cited by
-
CNN-LSTM optimized with SWATS for accurate state-of-charge estimation in lithium-ion batteries considering internal resistance
Scientific Reports (2025)
-
Lithium battery state of health (SOH): analysis based on capacity increments and data-driven methods
Electrical Engineering (2025)
