
Abstract
The farming of animals is one of the largest industries, with animal food products, milk, and dairy being crucial components of the global economy. However, zoonotic bacterial diseases, including brucellosis, pose significant risks to human health. The goal of this research is to develop a mathematical model to understand the spread of brucellosis in cattle populations, utilizing the Caputo-Fabrizio operator to control the disease’s incidence rate. The existence and uniqueness of the model’s solution are ensured through the Lipschitz conditions, the contraction mapping theorem, and the application of the kernel properties of the Caputo-Fabrizio operator. Sensitivity analysis is conducted to assess the impact of various factors on the disease’s progression. This study performs a realistic stability analysis of both global and local stability at the disease-free and the endemic equilibrium point which give a more accurate understanding of the dynamism and behavior of the system. Stability analysis is performed using Picard stability in Banach spaces, and Lagrange’s interpolation formula is employed to obtain initial approximations for successive fractional orders. The findings of this study demonstrate that fractional orders, along with memory effects, play a crucial role in describing the transmission dynamics of brucellosis. Sensitivity analysis helps identify the parameters most critical to the infection rate, providing essential data for potential control measures. The results highlight the applicability of the Caputo-Fabrizio operator in modeling the transmission of infectious diseases like brucellosis and offer a strong foundation for controlling disease spread within communities.
Similar content being viewed by others
Introduction
Most of the species of the Brucella bacteria are involved in causing zoonotic diseases such as bronchiolosis. It is estimated that 500 000 casualties occur each year due to brucellosis despite the fact that it is relatively controlled in the Australia and the UK. Despite there being rigorous Veterinary Hygiene Regulations in these regions, brucellosis is a chronic disease in; Caribbean, South America, Mediterranean Europe, Africa, Asia and the Middle East3. In some of these regions, it constitutes major economic challenges. In many cases, contact with the bacteria is presumed to be the reason behind Brucellosis in animals either direct or though mediators4. Indirect transmission on the other hand occur when you touch objects or surface’s that has been contaminated with the virus or droppings, or when you touch contaminated surfaces and then touch your face, nose or mouth among others. Other associated systems include respiratory or digestive systems when eating may also be affected5. While human brucellosis is acquired from contact with infected animals or their products. Abortion, epididymitis, placentitis and orchitis are the conditions most frequently associated with brucellosis. Cattle, sheep, goats, pigs, rabbits, horses, dogs and man are the usual animals that are affected by Brucellosis6. The application of domestic animal vaccination control and detection methods to avoid infection of bovine Brucella averts it7. However, together with the treatments, brucellosis is quickly halted or eliminated as has been noted above.
This paper will show how further information can be gained about the transmission of infectious disease using mathematical models. There have been different models developed over the years in an attempt to define the phenomena of zoonosis. In particular, Nyerere et al.8, the only way to prevent human from developing brucellosis is by refraining from diseases that infect domestic animals. They use a mathematic model to establish the impact of various control parameters on the transmission dynamics of brucellosis in human and animals’ population. The rational approach to successfully address the optimal control is based on environmental sanitation, personal protection by human beings, mass immunization and stepwise control of cattle and small stock population within an area9. To analyse the brucellosis infection with specific preventive measures,10 formulated a mathematical model. The impact of brucellosis on the Yellowstone bison population is under analysis in11. In view of this, there is no justification to start a vaccination campaign that includes the park as a whole. In the study12, authors focus on the time related to the treatment of cattle for brucellosis.
Fractional calculus is applied almost in all scientific fields. The first advantage that is conspicuous when dealing with FDEs is the capacity to differentiate between memory and hereditary features of diverse mathematical models. Factional order models therefore appear less ad hoc and closer to fact and data than we get from traditional integer order models13. Khan along with others. Leptospirosis epidemic model was quantitatively discussed by14. As proposed in Atangana-Baleanu (AB),15 the disease leptospirosis is modeled in terms of fractional epidemic. Taking advantage of the prospective of stochastic numerical supervised neural-network, Mukdasai and colleagues. The fractional order Leptospirosis model was developed quite recently and16 has produced numerical solutions of it. At the mere end of the previous decade, Atangana17 introduced a completely novel derivative, the so called fractal-fractional derivative. Often such an approach seems to be very effective in solving complex issues in various fields of human activities. The newly developed fractional derivative with fractal feature outdoes conventional fractional as well as other types of derivatives. A short term solution was not employed in relations to the dynamics of the infection within the plant and a new model involving a fractional derivative fractal was discussed by Farmers et al.18. The current novel corona epidemic was analyzed by the authors of cite21 using mathematical analysis applying fractal-fractional techniques. Akgul Ali et al.20 investigated study groups of people with diabetes. To investigate the dynamics of the transmission of Q fever within ticks and livestock as well as the bacterial load in the environment, fractal-fractional Atangana-Baleanu derivatives and integrals in the sense of Caputo were used by the researchers21. Based on the newly derived Newton polynomial, a numerical method was given. In22, a fractional order COVID-19 model was considered via fractal-fractional analysis. The infection transmission of Brucellosis in23 is modeled using a Caputo-Fabrizio operator model.The paper30 presents a numerical approach using Haar wavelet collocation methods to solve a fractional-order model for computer virus dynamics. The work in31 analyzes COVID-19 dynamics with a fractional-order model incorporating the Mittag-Leffler kernel. Studies32,33 explore advanced numerical methods and fractional-order models for COVID-19 dynamics. The papers34,35,36 extend these models to specific contexts, such as Pakistan, the Omicron variant, and SARS-CoV-2 variants, while37 applies similar frameworks to Anthroponotic Cutaneous Leishmania transmission.
Brucellosis, caused by the Brucella species, poses a significant threat to livestock health and productivity, leading to substantial economic losses in the cattle industry worldwide. Understanding the dynamics of this infectious disease is crucial for developing effective control strategies. Traditional models often fail to capture the complex interactions inherent in disease transmission, particularly in heterogeneous populations. In this study, we employ a fractional-order derivative approach to model brucellosis dynamics, which allows for a more nuanced representation of memory effects and time delays in infection processes. The addition of fractional derivatives improves the model forecast’s accuracy since the rate at which cattle can be infected can be affected by the external environment and disease containment measures. Moreover, we include sensitivity analysis, in which we determine the factors through which particular disease outcomes are most affected, which results benefit policymakers and veterinarians. In light of this, this study advances knowledge on patterns of brucellosis transmission and mitigation in cattle through a synthesis of mathematical perspective with biological significance. It also reveals that Caputo-Fabrizio operator possesses some advantages for describing the behavior of different infectious diseases such as brucellosis. The non-integer order calculus impedes to describe memory effects and time-dependent behaviours more effectively, inherent in disease transmission processes and disregarded in the framework of integer order models. This operator is especially useful in epidemiological modeling as it allows to exhibit and prove the fundamental mathematical properties of existence, uniqueness and stability of solutions which give the model extra durability. Additionally, numerical results reveal that the Caputo-Fabrizio derivative can be used to better identify difficult infection dynamics, thus, it can be a valuable instrument in studying the transmission of brucellosis and other diseases.
The purpose of this work is to establish a fractional order model for SIRBV associated with the cattle brucellosis outbreak. The said fractional order model impacts on memory beyond what the classical order of model does. The credibility of conclusions derived from the imitation of the process of transmission of cattle brucellosis is examined in this work. We must admit that we are dealing here with a theory unique for the solutions of the fractal fractional model. The stability of the fixed point of the proposed model is examined in the global sense with the help of fix point theory. The included fractional derivatives have been approximated numerically by using the two-step Lagrange polynomial. Eight sections make up the paper: section 1 has an introduction; some simple fractional order derivatives that are useful in solving the epidemic model are presented in section 2. In section 3, disease transmission of endemic equilibrium, disease-free equilibrium, and the positivity of the fractional order model are presented, and sensitivity analysis is shown. In section 4 the fixed point theory is applied to establish the existence and uniqueness of a system of model solutions. Section 5 focus on the stability of the FO Brucellosis in the Cattle model. In section 6 of the study, the effects of the fractional parameters have been studied using an efficient numerical methods in solving the fractional order system. The last two sections, 7 and 8 focus on the findings and conclusion.
Basic definitions
The definitions of fundamental terms that are essential to comprehending fractional operators must be reviewed before we can start developing the model. Assume that the function P(t) , is a non-differentiable function with order \(0 < \eta \le 1\).
Definition 1
23 With \(0 < \eta \le 1\) and P(t), we can proceed. A fractional derivative with a power-law kernel is defined as:
Definition 2
24 For (1), the corresponding fractional integral operator is provided by.
Definition 3
24 A fractional derivative of kernel exponential decay has the following expression
Definition 4
24 Definition of the associated fractional integral operator for (3) is given by.
Definition 5
38 The Laplace transform is defined by
where p(t)is n-dimensional vector-valued function.
Definition 6
39 The Laplace transform of the Caputo Fabrizio fractional derivative of a function P(t) of order \(\eta > 0\) is defined as
Lemma 1
40 Let P(t) be a real continuous and differentiable function. Then, for any \(t \ge 0\) and \(0 < \eta \le 1\), we have
Fractional order brucellosis in cattle model
A deterministic model provided in12 will be used to examine the effects of different treatments on the spread of bovine brucellosis. The susceptible class of cattle can be defined as Cattle that does not possess immunity against brucellosis. Cattle are said to be infected (I, ) if they have been diagnosed to have the disease and are possible to infect other cattle. Recovered (R) cattle refer to a class of cattle that tested positive with bovine brucellosis in the past but have recovered fully from the disease. Bio-secured class(B) means a class of cattle which is freedom from bovine brucellosis by implementation of bio-security measures. These practices are well controlled to minimize contact with pathogenic organisms thus enhancing efforts to produce cattle in this class with out disease. Some of the attenuated movements may include restricted access to that environment, sanitation and avoidance of contact with other animals believed to be infected. Hence, under the protective measures, the cattle in the biosecured class, are presumed to be unable to contract the disease. The vaccinated class (V), on the other hand is all cattle that took a vaccine that was availed in the study for a temporary immunity against bovine brucellosis. This immnunity period may keep the cattle unharmed but it is not life span the immunity may drop low sometimes and boosters may be required after sometime. Unlike the biosecured class, vaccinated cattle still have some potential for future susceptibility to infection, especially as the vaccine’s effectiveness decreases.
In the study of brucellosis dynamics using fractional derivatives, key assumptions are made regarding infection rates, control measures, and interaction terms. Infection rates are derived from empirical data reflecting species susceptibility and environmental factors influencing transmission27. Control measures, such as vaccination and culling strategies, are informed by historical intervention data to assess their effectiveness28. Interaction rates between species, particularly between cattle and potential rodent reservoirs, are established through ecological studies that quantify contact frequency and disease transmission likelihood29. The use of fractional derivatives allows for capturing complex dynamics and memory effects in disease transmission, enhancing model accuracy. Overall, these assumptions facilitate a robust framework for understanding and controlling brucellosis outbreaks in cattle populations. To represent the model mathematically, it is assumed that cattle are vaccinated at a rate of \(\gamma S\) and are recruited into the susceptible at a rate of \(\omega\). The animals with increased immunity return to the susceptible compartment at a rate of \(\tau V\). As a result of stringent biosecurity protocols, cattle migrate from the susceptible compartment to the recovered compartment at a rate of \(\upsilon S\). The bovine brucellosis virus spreads from infected animals to susceptible humans at a rate of \(\beta\). The sick animals get better and move to the compartment where \(\alpha I\) recovery is happening. Furthermore, a rate known as \(\gamma I\) is used to eliminate the infected people. The cattle’s recovery and subsequent return to the susceptible at a rate, \(\kappa R\), are understood to represent the rates of disease-induced and natural death, \(\mu\) and \(\psi\), respectively. The Caputo Fabrizio operator with fractional dimension \(0 < \eta \le 1\) was used to modify the brucellosis infection model with fractional differential.
the initial conditions are
Positivity and boundedness
In this subsection, the positivity and boundedness of the solution for the proposed model (8) is given.
Theorem 3.1
For any given set of positive initial conditions S(0), I(0), R(0), B(0) and V(0), the variables of the model (8) remain positive and bounded.
Proof
From the system (8), we have
Therefore, the variables of the system (8) remain positive. Next, we prove the boundedness of the model (8) solutions. Consider the total number of population:
Using the Caputo Fabrizio fractional derivative and the Caputo Fabrizio derivative linearity property, we get
We solve the Gronwall’s inequality (10) using the Laplace transform with initial conditions
After simplification and taking inverse Laplace transform we get
After performing a simple algebra, one may write
Thus if \(N(0) \le \frac{\omega }{\mu }\) then for \(t>0\),\(N(t) \le \frac{\omega }{\mu }\). This shows that the total population N(t) , that is, the subpopulations S(t) , I(t) , R(t) , B(t) and V(t), are bounded. This proves the boundedness of the solution of system (8). \(\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad \square\)
Model analysis
Equilibrium points of the proposed fractional order model (8) are obtained by solving the system
and supposing that all infectious class sizes are equal to zero which means that there is no disease eradication in the studied population, thus the disease-free equilibrium state is:
To find the model endemic equilibrium point (8), where at least one disease class is not zero. To find the equilibrium values (\(E^*\)), the right-hand sides of the system (8) are set to zero, representing a steady-state condition. Let \({E^ * } = ({S^ * },\ {E^ * }, \ {R^ * },\ {B^ * } \ {V^ * })\) be the endemic equilibrium point of the model (8) and is given by
Also from12 \({\mathscr {R}}_0\):
In Fig.1(a),1(c) and Fig.1(f) \({\mathscr {R}}_0\) increased when \(\omega\), \(\beta\), \(\alpha\) and \(\psi\) increased. In Fig.1(d), Fig.1(f) \({\mathscr {R}}_0\) increased when \(\omega\) increased and \({\mathscr {R}}_0\) decreased when \(\omega\), \(\upsilon\) increased. In Fig.2(a) \({\mathscr {R}}_0\) decreased when \(\gamma\), \(\upsilon\) increased and Fig.2(b), 2(c) and 2(d) shows the results for \(\beta , \mu , \gamma\) and \(\psi\) respectively. In Fig.2(e) \({\mathscr {R}}_0\) decreased when \(\gamma\), \(\mu\) increased. In Fig.2(f) \({\mathscr {R}}_0\) increased when \(\tau\) increased and \({\mathscr {R}}_0\) increased when \(\gamma\) decreased.

Parameters impact on basic reproductive number.

Parameters impact on basic reproductive number.
Sensitivity analysis
For the relevant parameters, we can compute the partial derivative in order to examine the sensitivity of \({\mathscr {R}}_0\).
This investigation reveals that the sensitivity index could maintain consistent values based on certain factors, or it may not be affected by any independent factors. The significance of the parameters involved in \({\mathscr {R}}_0\) is represented in Fig.3 through the partial rank correlation coefficient (PRCC), and a detailed account of these findings is presented in Table 1.

Relevance of the parameters in \({\mathscr {R}}_0\) is determined by PRCC results.
The results derived from examining the PRCC data allow us to identify the crucial factors that significantly influence the potential for disease propagation, in addition to quantifying the scope and impact direction of these factors. Assessing the sensitivity of the initial infection rate (\({\mathscr {R}}_0\)) to modifications in individual parameters offers a broader understanding of the model’s effectiveness and the vital part played by diverse elements in facilitating the spread of Brucellosis in cattle populations.
Existence and uniqueness of the solution
Here, we demonstrate that the system has a unique solution. First written as follows is the system (8):
where \(\varpi = S, I, R, B, V,\)
Integral form can be used to solve both sides of the aforementioned equations.
where
\(\Phi \left( \eta \right) = \frac{{2(1 - \eta )}}{{(2 - \eta )M(\eta )}}\) and \(\Theta (\eta ) = \frac{{2\eta }}{{(2 - \eta )M(\eta )}}.\) We prove that \(A_i = 1, 2, 3, 4, 5\) kernels satisfy the Lipschitz condition and contraction.
Theorem 5.1
Assuming that the inequality that follows holds, the kernel \(A_1\) satisfies the contraction and the Lipschitz condition.
Proof
For S and \(S_1\), we have
Suppose that \({m_1} = \beta {k_1} + (\mu + \gamma + \upsilon ),\) where \(\left\| {{I}} \right\| \le {k_1},\) is bounded function. So
Thus, if \(0 \le \beta {k_1} + (\mu + \gamma + \upsilon ) < 1\), then \(A_1\) is a contraction and it satisfies the Lipschitz condition. Similarly, \(A_i, i = 2, 3, 4, 5\) satisfy the Lipschitz conditions:
where \({m_2} = \beta {k_2} + (\mu + \psi + \alpha + \chi ),\) \({m_3} = (\mu + \kappa ),\) \({m_4} = \mu\) and \({m_5} = (\mu + \tau )\) are bounded functions. Under the condition that \(0 \le m_i <1,\) \(A_i\) are contractions for \(i = 2, 3, 4, 5\).
Considering the first equation from equation (15), the following recursive forms should be taken into account:
with the initial condition \({S_0}(t) = S(0)\). The norm in the equation above is defined by
Lipschitz condition (16) gives us
Similar to this, we get
Hence, we can state that
The following theorem shows that there is a solution. \(\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\square\)
Theorem 5.2
If \(\xi _1\) exists such that \(\Phi (\eta ){m_i} + \Theta (\eta ){\xi _1}{m_i} < 1\), then the fractional model (8) has a system of solutions.
Proof
Given the recursive method and equations (17) and (18), we deduce that
This suggests that the system is continuous and has a solution. Currently, we show how the model solution (15) is produced by the previously mentioned functions. In light of that
So
A repetition of the process yields
At \(\xi _1 ,\) we get
We obtain \(\left\| {{\Upsilon _{in}}(t)} \right\| \rightarrow 0,i = 2,3,4,5\) by limiting the current equation as n approaches \(\infty\). In the same way, we could show that \(\left\| {{\Upsilon _{in}}(t)} \right\| \rightarrow 0,i = 2,3,4,5.\) This completes the proof.
Assuming that there is another possible solution for the system, such as \(S_1(t),\) \(I_1(t),\) \(R_1(t),\) \(R_1(t),\) \(B_1(t),\) and \(V_1(t),\) then we have
We make use of the equation mentioned above’s norm.
Lipschitz condition (16) implies that
Thus
\(\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad \square\)
Theorem 5.3
If the conditions listed below are satisfied, then the model (8) solution is distinct.
Proof
Since \(|S(t) - {S_1}(t)| = 0,\) presuming condition (19) is met. Consequently, we get \(S(t) = S_1(t)\). For I, R, B, and V, an analogous equality can be shown. \(\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad \square\)
Stability analysis
The stability of an epidemic model determines whether the disease will die out or persist over time. Typically, this involves analyzing the system’s equilibrium points disease-free and endemic and assessing their stability using methods such as eigenvalue analysis or Lyapunov functions. If the disease-free equilibrium is stable, the infection will eventually vanish; if the endemic equilibrium is stable, the infection will persist at a constant level within the population.
Local stability at disease free point
Theorem 6.1
At the DFE point \(E_0\), the system is locally asymptotically stable provided
Proof
The jacobian matrix for the system (8) at the DFE \(E_0 (S_0, E_0, R_0, B_0, V_0)\) is given by
The characteristic equation of (20) given by \(\left| {J({E_0}) - \lambda I} \right| = 0,\) The roots of the characteristic equation are \(\lambda _1 = \beta S - (\mu + \psi + \alpha + \chi )\), \(\lambda _2 = -(\mu + \kappa )\) and \(\lambda _3 = -\mu\). Here, the roots \(\lambda _2\), \(\lambda _3\) are negative and the root \(\lambda _1\) is negative if \(\beta S_0 < (\mu + \psi + \alpha + \chi )\) and the remaining eigenvalues are those of the following submatrix:
Clearly all eigenvalues are negative. Thus, at the DFE point \(E_0\), the system is locally asymptotically stable provided
Global stability at endemic equilibrium point
Theorem 6.2
At the EF point \(E^*\), the system is the system is globally asymptotically stable.
Proof
Let the Lyapunov function be
Using the linearity property of the Caputo Fabrizio operator
Using Lemma 1, we get
By proper choice of
from (8), \(_0^{CF}D_t^\eta V(S,I,R,B,V)\) becomes
That is,
Hence, at its EE point, the system is globally asymptotically stable. \(\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad \square\)
Iterative scheme for caputo fabrizio with stability results
When both sides of model (8) are subjected to the Laplace transform, the ensuing system results:
With the initial conditions, we obtain
Remember that is providing the solutions as infinite series, with S(t) , I(t), R(t) , B(t) , and V(t)
we resolve nonlinear terms as follows:
Substituting (28) and (29) into (27) results in
Theorem 6.3
Let \(({\Xi },\left| . \right| )\) be Banach space and \(\wp :\Xi \rightarrow \Xi\) be a map satisfying:
for all \(m,n \in {\Xi }\), where \(0 \le \iota\), \(0 \le \iota < 1\). In that case, \(\wp\) is Picard \(\wp\)-stable.
Theorem 6.4
Given the definition of a self map as follows, let \(\wp\)
Then, the iteration is \(\wp\)-stable in \({L^1}(m,n)\) if the following statements are achieved:
Proof
Using the following evaluation for \((v,u) \in M \times M\), we demonstrated the fixed point of wp:
By calculating the norm of both sides of the first equation of (33) we obtain
using triangular inequality and simplifying (34), we get
We allowed for the relative influence of both solutions:
If we replace this in (36), we obtain the relation shown below:
Also the convergent sequence \(S_v\), \(I_v\), \(R_v\), \(B_v\) and \(V_v\) are bounded. From there, we can derive five distinct positive constants for each t such that: \(M_1\), \(M_2\), \(M_3\), \(M_4\), and \(M_5\)
Further, considering equations (37) and (38),we get
where \(f_1\), \(f_2\), \(f_3\) and \(f_4\) are functions of \({{{{\mathscr {L}}}}^{ - 1}}\left\{ {{{{\mathscr {L}}}}\frac{{s + \eta (1 - s)}}{s}} \right\}\). Similarly, we are able to obtain
where
Therefore, K has a fixed point. Considering equations (39) and (40), we assume:
This completes the proof. \(\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\square\)
Numerical scheme
The system (8) can be solved numerically using the method we present in this section, which is based on a Newton polynomial26. To numerically simulate the suggested mathematical model explaining the transmission of Brucellosis in cattle, we employ the fractal fractional operator with exponential decay kernel.
For this model, we could have the following scheme
Simulation and discussion
The initial values and parameters for system (8) are listed in Table 2 and were taken from12. Using data from Table 2 corresponding to various fractal-fractional orders, we simulate the solution behavior of model (8) for S, I, R, B, and V.
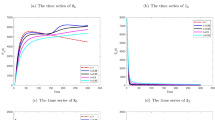
The figures illustrate the dynamics of a brucellosis model under various fractional orders and control strategies. For the susceptible population (\(S(t)\)), Figs.4(a-c) show an initial decline followed by stabilization, with higher fractional orders (\(\zeta = 1.0\)) leading to faster dynamics and lower susceptible numbers, while lower orders (\(\zeta = 0.6\)) result in slower changes and higher stability. Similarly, the infected population (\(I(t)\)), shown in Figures 5(a-c), declines over time, with sharper decreases observed for higher fractional orders, indicating effective mitigation. The recovered population (\(R(t)\)) in Figs.6(a-c) grows steadily, with faster recovery dynamics linked to higher fractional orders. Figs.7(a-c) highlight the dynamics of the Brucella-contaminated environment (\(B(t)\)), where contamination levels increase more rapidly at higher fractional orders, stabilizing at lower levels as fractional orders decrease. Vaccination dynamics (\(V(t)\)) in Figs.8(a-c) follow a similar trend, with higher orders producing faster vaccination coverage growth. Figures 9(a-f) explore the effects of combined control measures. Vaccination and culling (9a-b) significantly reduce infections (\(I(t)\)) and stabilize \(S(t)\). Biosecurity and culling (9c-d) effectively enhance \(S(t)\) recovery while sharply reducing \(I(t)\). The combination of vaccination and biosecurity (9e-f) moderately increases \(S(t)\) and reduces \(I(t)\) over time. These results collectively demonstrate that fractional-order dynamics are highly sensitive to parameter variations, with higher orders capturing faster transmission and intervention effects. The measures included vaccination, elimination of affected animals, and maintaining security against diseases which help in disease fight in the fight.
The figures offer a comprehensive view of the brucellosis dynamics in cattle and their biological implications. In Figs.4(a-c), the susceptible population (\(S(t)\)) initially decreases as the disease spreads among uninfected cattle. Over time, this population stabilizes due to the interplay between natural recruitment, disease transmission, and interventions. Higher fractional orders (\(\zeta = 1.0\)) correspond to faster disease spread and quicker adaptation to interventions, while lower orders (\(\zeta = 0.6\)) reflect a slower, more gradual response, potentially mirroring biological processes with delayed effects or less efficient control measures. The infected population (\(I(t)\)), shown in Figs.5(a–c), decreases over time as infected cattle either recover or are culled. This trend is biologically significant because it reflects effective herd immunity development and the impact of interventions like vaccination. Higher fractional orders capture more rapid clearance of infection, aligning with scenarios where vaccination and biosecurity measures are efficiently implemented. Figs.6(a-c) depict the recovered population (\(R(t)\)), which grows as infected cattle overcome the disease and gain immunity. The faster rise in \(R(t)\) for higher fractional orders indicates a stronger immune response and successful recovery mechanisms. Conversely, lower fractional orders reflect slower recovery, suggesting weaker immune responses or delayed intervention effects. Figs.7(a-c) illustrate the dynamics of the Brucella-contaminated environment (\(B(t)\)), where contamination increases due to the pathogen’s persistence in the environment. Higher fractional orders show rapid contamination build-up, indicating conditions with higher interaction rates or insufficient control measures. Lower fractional orders demonstrate slower contamination growth, potentially linked to effective biosecurity practices that reduce pathogen spread. Figs.8(a-c) show vaccination dynamics (\(V(t)\)), with higher fractional orders leading to rapid increases in vaccinated cattle. This reflects efficient vaccination programs and enhanced herd immunity, reducing the susceptible population’s size and breaking transmission chains. Lower fractional orders suggest slower vaccine uptake or less effective coverage. In Figs.9(a-f), combined control measures are analyzed. Vaccination and culling of seropositive cattle (9a-b) biologically reduce disease prevalence by removing infection sources and boosting immunity. Biosecurity and culling (9c-d) enhance the protection of the susceptible population by limiting pathogen exposure and directly removing infected individuals. The combination of vaccination and biosecurity (9e-f) demonstrates a balanced approach, where enhanced immunity and reduced environmental contamination synergistically lower infection rates. Biologically, these results emphasize the importance of fractional-order modeling in capturing the memory effects and delayed responses inherent in real-world disease dynamics. They underscore the critical role of vaccination, culling, and biosecurity in controlling brucellosis and highlight the necessity for tailored strategies that consider the specific biological and environmental factors influencing disease spread.
Changes in key parameters such as infection rates, control measures, and interaction rates significantly influence brucellosis dynamics. Higher transmission rates can lead to increased disease prevalence, necessitating stronger control strategies like vaccination and culling. Effective vaccination coverage can substantially reduce infection rates and enhance herd immunity. Additionally, managing interactions between cattle and potential reservoirs (e.g., rodents) can mitigate transmission risks. The proposed fractional-order model was validated using parameter values from studies on brucellosis dynamics in cattle populations, such as recruitment, infection, and vaccination rates12. The model’s predictions closely align with observed trends, including the decline in infected cattle populations (\(I(t)\)) after implementing vaccination and biosecurity interventions. The use of the Caputo-Fabrizio operator enhances the model’s ability to incorporate memory effects, capturing delayed responses to control measures, as seen in empirical studies on disease management. Furthermore, the model accurately reflects Brucella persistence in the environment (\(B(t)\)), consistent with documented survival patterns of the pathogen in livestock settings. These findings highlight the model’s effectiveness as a predictive tool for managing brucellosis and guiding policy decisions to mitigate its impact on cattle populations. The numerical results highlight that vaccination, as a single control measure, is highly effective in reducing the infected population, with the memory effects captured by the operator emphasizing the gradual accumulation of immunity across the herd. When paired with culling of seropositive cattle, the memory effects show enhanced long-term reductions in infection prevalence due to the combined impact of removing infection sources and preventing new cases. The Caputo-Fabrizio operator also demonstrates the compounded benefits of a three-pronged approach–vaccination, culling, and biosecurity protocols’by capturing how delayed and sustained interventions collectively stabilize susceptible populations and significantly reduce environmental contamination (\(B(t)\)) over time. This multifaceted strategy achieves the most significant long-term reduction in brucellosis prevalence, highlighting the operator’s utility in evaluating the delayed impact of combined control measures.The model’s findings on brucellosis dynamics in cattle have important real-world implications for disease management. Effective control measures can lead to significant economic benefits, such as increased livestock productivity and reduced veterinary costs. The insights emphasize the need for robust surveillance to prevent zoonotic transmission to humans, particularly through unpasteurized dairy products. Additionally, the findings can inform public policy and targeted interventions, optimizing resource allocation. Lastly, they support educational campaigns to raise awareness about brucellosis prevention among farmers and consumers, enhancing health outcomes for both livestock and humans. The model’s limitations include assuming uniform population behavior, which overlooks factors like age, immunity, and socio-environmental differences. It also does not account for pathogen resistance, behavioral changes, or environmental influences that could affect transmission dynamics. Additionally, reliance on existing data may limit the model’s accuracy, especially in capturing localized variations and real-world challenges in intervention effectiveness.

The dynamics of S with different fractal fractional order. (a) At \(\zeta = 1\). (b) At \(\zeta = 0.8\). (c) At \(\zeta = 0.6\).

The dynamics of I with different fractal fractional order. (a) At \(\zeta = 1\). (b) At \(\zeta = 0.8\). (c) At \(\zeta = 0.6\).

The dynamics of R with different fractal fractional order. (a) At \(\zeta = 1\). (b) At \(\zeta = 0.8\). (c) At \(\zeta = 0.6\).

The dynamics of B with different fractal fractional order. (a) At \(\zeta = 1\). (b) At \(\zeta = 0.8\). (c) At \(\zeta = 0.6\).

The dynamics of V with different fractal fractional order. (a) At \(\zeta = 1\). (b) At \(\zeta = 0.8\). (c) At \(\zeta = 0.6\).

Simulation of S(t) and I(t) with various combination of control interventions.
Conclusion
This paper presents a detailed analysis of the Brucellosis model using the Caputo-Fabrizio fractional order derivative. By applying the fixed-point theorem, we demonstrate that the solutions to the developed model exist, are unique, and remain stable, providing further evidence that the non-integer order model is more robust than the conventional integer-order model. Simulations were conducted using the iterative Laplace transform technique, with parameters derived from existing literature. The results revealed that the disease dynamics are highly sensitive to the fractional order of the derivative, underscoring the importance of using the Caputo-Fabrizio operator in predicting the spread of brucellosis. The findings establish the effectiveness and accuracy of the Caputo-Fabrizio fractional derivative in modeling Brucellosis and suggest its potential applicability to other infectious diseases.
However, this study has certain limitations that should be noted. Many of the parameters used in the model were estimated based on existing literature, which may result in discrepancies when compared to real-world data from different regions or populations. Additionally, the model does not account for population heterogeneity, meaning factors such as age, immunity levels, and socio-economic status are not differentiated, which could influence the spread of the disease. Future research could focus on developing more sophisticated models, such as those incorporating different population structures and spatial distributions, as well as time variations in the model’s parameters. It would also be valuable to apply a similar model to other infectious diseases with comparable transmission dynamics. Further empirical research is necessary to compare the model’s findings with actual data to assess its effectiveness for public health strategies. Expanding the research to include other fractional operators and comparing their efficiency could enhance our understanding of the most appropriate mathematical tools for modeling disease transmission.
Data availibility
The datasets analyzed during the current study are available from the corresponding author upon reasonable request.
Change history
09 April 2025
A Correction to this paper has been published: https://doi.org/10.1038/s41598-025-91927-8
References
Li, M. et al. Transmission dynamics and control for a brucellosis model in Hinggan League of Inner Mongolia. China. Math. Biosci. Eng 11(5), 1115–1137 (2014).
Akhvlediani, T. et al. Epidemiological and clinical features of brucellosis in the country of Georgia. PLoS One 12(1), e0170376 (2017).
Boschiroli, M. L., Foulongne, V. & O’Callaghan, D. Brucellosis: a worldwide zoonosis. Current opinion in microbiology 4(1), 58–64 (2001).
Mantur, B. G. & Amarnath, S. K. Brucellosis in India’a review. Journal of biosciences 33(4), 539–547 (2008).
Brouwer, A. F., Weir, M. H., Eisenberg, M. C., Meza, R. & Eisenberg, J. N. Dose-response relationships for environmentally mediated infectious disease transmission models. PLoS computational biology 13(4), e1005481 (2017).
Nie, J. et al. Modeling the transmission dynamics of dairy cattle brucellosis in Jilin Province. China. Journal of Biological Systems 22(04), 533–554 (2014).
Li, M. T., Sun, G. Q., Zhang, W. Y. & Jin, Z. Model-based evaluation of strategies to control brucellosis in China. International Journal of Environmental Research and Public Health 14(3), 295 (2017).
Nyerere, N., Luboobi, L. S., Mpeshe, S. C., & Shirima, G. M. Mathematical model for brucellosis transmission dynamics in livestock and human populations. (2020).
Nyerere, N., Luboobi, L. S., Mpeshe, S. C. & Shirima, G. M. Optimal control strategies for the infectiology of brucellosis. International Journal of Mathematics and Mathematical Sciences 2020, 1–17 (2020).
Nyerere, N., Luboobi, L., Mpeshe, S., & Shirima, G. Mathematical model for the infectiology of brucellosis with some control strategies. (2019).
Hobbs, N. T. et al. State-space modeling to support management of brucellosis in the Yellowstone bison population. Ecological Monographs 85(4), 525–556 (2015).
Abagna, S., Seidu, B., & Bornaa, C. S. A mathematical model of the transmission dynamics and control of bovine brucellosis in cattle. In Abstract and Applied Analysis (Vol. 2022). Hindawi. (2022).
Abdullah, M., Ahmad, A., Raza, N., Farman, M. & Ahmad, M. Approximate solution and analysis of smoking epidemic model with Caputo fractional derivatives. International Journal of Applied and Computational Mathematics 4, 1–16 (2018).
Khan, M. A., Saddiq, S. F., Islam, S., Khan, I., & Ching, D. L. C. Epidemic model of leptospirosis containing fractional order. In Abstract and Applied Analysis (Vol. 2014). Hindawi. (2014).
Ullah, S. & Khan, M. A. Modeling and Analysis of Fractional Leptospirosis Model Using Atangana-Baleanu Derivative 49–67 (Trends and Applications in Science and Engineering, Fractional Derivatives with Mittag-Leffler Kernel, 2019).
Mukdasai, K. et al. A numerical simulation of the fractional order Leptospirosis model using the supervise neural network. Alexandria Engineering Journal 61(12), 12431–12441 (2022).
Atangana, A. Fractal-fractional differentiation and integration: connecting fractal calculus and fractional calculus to predict complex system. Chaos, solitons & fractals 102, 396–406 (2017).
Farman, M., Sarwar, R. & Akgül, A. Modeling and analysis of sustainable approach for dynamics of infections in plant virus with fractal fractional operator. Chaos, Solitons & Fractals 170, 113373 (2023).
Li, X. P. et al. Modeling the dynamics of coronavirus with super-spreader class: A fractal-fractional approach. Results in Physics 34, 105179 (2022).
Akgül, A. et al. Fractional Order Glucose Insulin Model with Generalized Mittag-Leffler Kernel. Appl. Math 17(2), 365–374 (2023).
Asamoah, J. K. K. Fractal-fractional model and numerical scheme based on Newton polynomial for Q fever disease under Atangana-Baleanu derivative. Results in Physics 34, 105189 (2022).
Farman, M. et al. Fractal-fractional operator for COVID-19 (Omicron) variant outbreak with analysis and modeling. Results in Physics 39, 105630 (2022).
Peter, O. J. Transmission dynamics of fractional order Brucellosis model using caputo-fabrizio operator. International Journal of Differential Equations 2020, 1–11 (2020).
Caputo, M. & Fabrizio, M. A new definition of fractional derivative without singular kernel. Progr. Fract. Differ. Appl 1(2), 73–85 (2015).
Atangana, A., & Baleanu, D. D, New fractional derivatives with nonlocal and non-singular kernel: theory and application to heat transfer model, (2016) arXiv preprint arXiv:1602.03408.
Atangana, A. & Owolabi, K. M. New numerical approach for fractional differential equations. Mathematical Modelling of Natural Phenomena 13(1), 3 (2018).
Yapiskan, D. & Eroglu, B. B. I. Fractional-order brucellosis transmission model between interspecies with a saturated incidence rate. Bulletin of Biomathematics 2(1), 114–132 (2024).
Farman, M. et al. Analysis of a fractional order Bovine Brucellosis disease model with discrete generalized Mittag-Leffler kernels. Results in Physics 52, 106887 (2023).
Peter, O. J. Transmission dynamics of fractional order brucellosis model using caputo-fabrizio operator. International Journal of Differential Equations 2020(1), 2791380 (2020).
Zarin, R., Khaliq, H., Khan, A., Ahmed, I. & Humphries, U. W. A numerical study based on haar wavelet collocation methods of fractional-order antidotal computer virus model. Symmetry 15(3), 621 (2023).
Jitsinchayakul, S. et al. Fractional modeling of COVID-19 epidemic model with harmonic mean type incidence rate. Open Physics 19(1), 693–709 (2021).
Chu, Y. M., Zarin, R., Khan, A. & Murtaza, S. A vigorous study of fractional order mathematical model for SARS-CoV-2 epidemic with Mittag-Leffler kernel. Alexandria Engineering Journal 71, 565–579 (2023).
Zarin, R. Numerical study of a nonlinear COVID-19 pandemic model by finite difference and meshless methods. Partial Differential Equations in Applied Mathematics 6, 100460 (2022).
Zarin, R., Khan, A., Akgül, A. & Akgül, E. K. Fractional modeling of COVID-19 pandemic model with real data from Pakistan under the ABC operator. AIMS Mathematics 7(9), 15939–15964 (2022).
Raizah, Z. & Zarin, R. Advancing COVID-19 Understanding: Simulating Omicron Variant Spread Using Fractional-Order Models and Haar Wavelet Collocation. Mathematics 11(8), 1925 (2023).
Zarin, R. A robust study of dual variants of SARS-CoV-2 using a reaction-diffusion mathematical model with real data from the USA. The European Physical Journal Plus 138(11), 1–23 (2023).
Alqhtani, M., Saad, K. M., Zarin, R., Khan, A. & Hamanah, W. M. Qualitative behavior of a highly non-linear Cutaneous Leishmania epidemic model under convex incidence rate with real data. Mathematical Biosciences and Engineering 21(2), 2084–2120 (2024).
Kexue, L. & Jigen, P. Laplace transform and fractional differential equations. Applied Mathematics Letters 24(12), 2019–2023 (2011).
ur Rahman, M., Ahmad, S., Matoog, R. T., Alshehri, N. A., & Khan, T.,. Study on the mathematical modelling of COVID-19 with Caputo-Fabrizio operator. Chaos, Solitons & Fractals 150, 111121 (2021).
Boukhouima, A., Zine, H., Lotfi, E. M., Mahrouf, M., Torres, D. F., & Yousfi, N. Lyapunov functions and stability analysis of fractional-order systems. In Mathematical Analysis of Infectious Diseases (pp. 125-136). Academic Press. (2022).
Author information
Authors and Affiliations
Contributions
All authors wrote the main manuscript text reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interest
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The original online version of this Article was revised: In the original version of this Article the authors were incorrectly affiliated. Full information regarding this can be found in the correction published with this article.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Farman, M., Hincal, E., Jamil, S. et al. Sensitivity analysis and dynamics of brucellosis infection disease in cattle with control incident rate by using fractional derivative. Sci Rep 15, 355 (2025). https://doi.org/10.1038/s41598-024-83523-z
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-83523-z
