
Abstract
As oil and gas exploration and development gradually expand into complex areas such as deep and ultra-deep, offshore, and unconventional resources, directional drilling and horizontal wells have become the main methods for increasing reserves and production in petroleum engineering. To address the challenging task of quantitatively evaluating downhole weight on bit (DWOB) and friction drag during sliding drilling in these types of wells, this study proposes a novel method for back-calculation by combining the rate of penetration (ROP) equation with sliding drilling footage. Based on the drilling parameters of the composite drilling phase and the rate of penetration, the ROP equation is established, the downhole weight on bit is estimated based on the drilling parameters of the sliding drilling phase and the ROP. In light of the drilling parameters of the composite drilling phase and the rate of penetration, the ROP equation is established through equation fitting by the least squares method. The downhole weight on bit is estimated on the basis of the drilling parameters of the sliding drilling phase and the ROP. Then the axial friction drag of drilling tools is estimated by combining with the surface weight on bit without the need to equip with the measurement of pup joint. This method enables real-time analysis of sliding drilling efficiency and quantitative estimation of friction drag, with the capability to identify friction reversal trends at formation interfaces. Field results demonstrate that it can effectively capture both gradual and abrupt anomalies in friction behavior. Following mitigation measures, the calculated axial friction drag was reduced by 3.86–90.15%, highlighting the method’s sensitivity to complex downhole conditions and its practical value in improving drilling tool performance. It provides dynamic insight into sliding drilling efficiency and quantitative friction assessment, offering theoretical support for optimizing drilling efficiency, enhancing bottom-hole tool loading, and evaluating the effectiveness of friction-reduction technologies.
Similar content being viewed by others
Introduction
With the oil and gas exploration and development gradually entering into the deep and extra-deep, marine, unconventional and other complex fields, directional wells and horizontal wells have become the main means of increasing reserves and production in petroleum engineering1,2. In the process of directional drilling, it is necessary to dynamically adjust the trajectory of the borehole with the help of related drilling tools to accurately encounter the target reservoir, and at present the main directional drilling processes are curved screw directional and rotary steerable drilling. Rotary steerable drilling is more efficient, but the cost is high and the slope rate often fails to meet the demand of high slope rate trajectory control, while the curved screw drilling tool is low cost and mature technology, and still has a large range of applications. In the directional process of curved screw drilling tools, sliding drilling (locking the top drive or rotary, keeping the surface speed at 0) is required to realize different objectives of well slope or azimuth control by adjusting the angle of the tool face. During sliding drilling, the tool assembly theoretically “lies” on the well wall, and the weight on bit is applied to the bottom of the well by lowering the tool, and the rotational speed of the screw drilling tool is driven by hydrodynamic energy to ultimately break the rock and control the trajectory of the drill bit3,4. For long horizontal sections and complex trajectories, the sliding drilling phase is often accompanied by the phenomenon of “back pressure”. High axial drag is generated along the drilling tool assembly. The surface weight on bit (SWOB) cannot be effectively transferred to the drill bit, resulting in low rate of penetration, uneven loads on the bottom drilling tool combination, and tool sticking. This affects drilling cycle, tool life span and construction safety5,6,7. Due to the bending deformation of the drill tool in the hole, the friction drag will inevitably be generated in the process of lifting and lowering8,9,10,11,12, which will affect the rate of penetration in the drilling process.
The success or failure of drilling is crucial to the stability and safety of unconventional oil and gas development13,14. The effective quantitative assessment of friction drag during sliding drilling cannot be separated from the accurate prediction of rate of penetration (ROP)15,16,17. The establishment of a multi-parameter prediction model of rate of penetration is the key to control and optimize friction drag. The rate of penetration is an important index that responds to the speed of the drill bit to break through the rock and deepen the drill hole, which is the key to measure the drilling efficiency. Accurate prediction of penetration rate is essential for optimizing drilling parameters in the drilling process, which can effectively improve efficiency and reduce costs18,19,20.
With the development of oil drilling technology and modern data science techniques, the mechanical rate of penetration equations have gone through different stages of development: empirical or physical models, machine learning models, and combined physical model-data-driven prediction models21,22. In terms of traditional methods to build equations for prediction, several physically based models such as B-Y model23, MSE model24, Motahhari model25 and other physics-based models have good stability, but still the consideration of factors is not sufficiently comprehensive and has some limitations. In terms of using machine learning to predict the rate of penetration of machinery, various machine learning algorithms such as random forests, support vector machines, and neural networks were used for ROP prediction26,27,28,29,30,31. Hegde et al.32 compared three traditional physics-based and data-driven models based on physical and data-driven modeling approaches. Cao et al.33 employed a Deep Autoregressive Network (DARN) and a Deep Neural Network (DNN) to predict bit torque in sliding mode using conventional drilling data, reducing reliance on costly sensors. Hu et al.34 introduced an Adaptive Random Forest (ARF) algorithm to dynamically predict ROP during real-time drilling, enabling rapid adaptation to changing formation conditions. Machine learning models are highly data-dependent and capable of extracting hidden patterns from high-frequency field data, demonstrating strong fitting capabilities. Meanwhile, physical models ensure the engineering rationality of predictions, making their integration with data-driven methods a growing research focus. However, in drilling scenarios with rapidly changing formation conditions and diverse drilling tools, purely data-driven approaches often lack extrapolation ability. Hybrid models, though more robust, typically require carefully crafted prior knowledge structures, making them complex and difficult to maintain stability in industrial applications. Consequently, achieving a balance between accuracy and generalization remains a key challenge. Meanwhile, traditional torque measurement methods still rely on downhole sensors35. These systems are expensive and complex, further highlighting the importance of developing intelligent prediction models based on conventional surface data.
In the absence of downhole engineering parameter measurement pup joint, the drilling construction site to determine whether “back pressure” and the severity of “back pressure” mainly rely on the technicians through the application of different weight on bit under the drilling time or rate of penetration subjective judgment, empirical, and difficult to quantitatively assess the sliding drilling. It is difficult to quantitatively assess the friction drag and downhole weight on bit (DWOB) during sliding drilling36,37,38. Current traditional friction drag and torque analysis models depend on hook load and torque calibration, which are unable to accurately describe the friction of thousands of meters of drilling tools in the borehole. Consequently, these models cannot provide real-time calculations of friction drag or downhole weight on bit with sufficient accuracy, making them inadequate for dynamic drilling conditions. Due to the lack of measurement tools, especially for non-key exploration wells, these evaluation methods are not widely applicable in routine drilling operations. Technicians are forced to rely on subjective experience to assess changes in back pressure and its severity, leading to significant uncertainties and potential risks in the sliding drilling process. Therefore, studying the trend of friction drag during sliding drilling of directional wells is of great importance. By optimizing friction assessment methods, more accurate and reliable monitoring of friction drag in directional well sliding drilling can be achieved, thus facilitating the optimization of drilling plans, timely parameter adjustments, and the prevention of issues such as stuck drilling. This will ultimately improve drilling efficiency, reduce costs, and enhance safety.
In light of these challenges, there is a pressing need for a tool-free friction evaluation method. Such an approach would eliminate the dependence on costly downhole sensors, providing a more practical and scalable solution for routine drilling operations. This study utilizes the data of drilling parameters recorded in historical wells and the least square method to fit the parameters of the composite drilling process and formulate the drilling rate equation. Then the ROP prediction is carried out for the sliding drilling phase, and the parameter dynamics change of the footage in the sliding drilling phase is used to inverse the theoretical downhole weight on bit. Theoretical axial friction drag is calculated based on the difference between the surface weight on bit and the theoretical downhole weight on bit during slip drilling. This enables quantitative analysis of friction drag during sliding drilling of directional wells. The quantitative evaluation of downhole weight on bit and friction drag in the sliding drilling phase can help analyze the directional efficiency and improve the movement of the drilling tools at the bottom of the well. It can realize the monitoring and post-drilling analysis of the whole process of sliding drilling, and provide the basis for evaluating the effect of friction and drag reduction tools, optimizing the drilling efficiency, and improving the loading condition of bottomhole drilling tools. This study is divided into five sections. Section 2 elaborates on the principles of the methods employed. Section 3 delves into how the proposed model quantifies friction drag, accompanied by field experiments. Section 4 analyzes and discusses the results obtained from the model’s application in the field. Section 5 summarizes the key findings, underscores the significance of the proposed model, and explores potential directions for future research. Figure 1 illustrates the technical roadmap of this study.

Technical framework and implementation roadmap.
Methodology
Data set
The data used in this study comes from a well in Puguang gas field in China, including well depth, drilling weight on bit (WOB), rotary revolutions per minute (RPM), and other engineering parameter data. In actual drilling operations, due to the limitations of sensors and other equipment, cost factors and other constraints, there is often the problem of fewer feature parameters in the dataset, and so a small number of site-specific and controllable features are selected to study the model generalizability. Although the current dataset is sufficient for modeling under typical drilling conditions, the application of more advanced data acquisition methods could improve the model’s accuracy. Techniques such as high-frequency surface sensing and real-time rig instrumentation would help capture more detailed downhole dynamics and enhance the model’s applicability in complex drilling environments. Among them, by obtaining the performance parameters of screw drilling tool, based on the displacement per revolution parameter combined with the information of drilling fluid displacement, the output rotational speed of screw drilling tool can be calculated, and the rotational speed of drill bit can be calculated based on the rotary RPM and the output rotational speed of screw:
Where \(RP{M_{Bit}}\) is the bit RPM, r/min; \(RPM\) is the rotary RPM, r/min; Q is the flow rate, L/s; \(RP{M_{{\text{model}}}}\) is the maximum value of the corresponding flow rate parameter of the screw drilling tool model, L/s; \(lps\) is the maximum value of the corresponding rotary RPM of the screw drilling tool model, r/min.
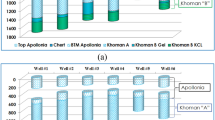
The interval of the collected data set is in the range of 3630–3818.25 m of well depth (Fig. 2), and the characteristics of the data are shown in Table 1. The selected data set provides a reliable data base for verifying the validity of the quantitative analysis method of downhole weight on bit and friction drag. In the subsequent study, this data set will be utilized for experiments and analysis to verify the applicability and accuracy of the proposed method under different models.

Visualization of drilling parameters.
ROP fitting model for composite drilling process
During sliding drilling, due to limitations on rock-breaking energy transmission and the need for wellbore trajectory control, the rate of penetration often falls below that of composite drilling. When predicting theoretical downhole weight on bit during sliding drilling, it is essentially an extrapolation of the drilling speed equation established based on high rock-breaking energy to low rock-breaking energy scenarios. According to the classical rate of penetration equation theory, the speed at which the drill bit penetrates and breaks the rock reflects changes in weight on bit. Analyzing and predicting the rate of penetration is conducive for discovering the variation patterns of friction drag during the sliding drilling phase. The rate of penetration equation is fitted based on weight on bit, bit RPM, confined compressive strength and bit diameter.
Where is the surface weight on bit, kN; RPMBit is the bit RPM, r/min; Q is the flow rate, L/s.
The rate of penetration prediction method adopted in this study is a theoretical calculation model with stability, and the model established based on the above analysis can be used to fit the mechanical rate of penetration during composite drilling.
-
(1)
The mechanical specific energy theory (MSE) with stable structure and strong interpretability is chosen to establish the prediction equation of mechanical drilling rate of penetration, which can be used for subsequent backcalculation of downhole weight on bit in sliding drilling. The rate of penetration equations based on the mechanical specific energy theory (MSE) are as follows24.
Where \(WOB\) is the weight on bit, kN; \(\mu\) is the coefficient of sliding friction (dimensionless); \(RPM\) is the rotary RPM, r/min; CCS is the confined compressive strength, N/mm2; \(EF{F_M}\) is the rock-breaking efficiency (dimensionless); \({A_B}\) is the area of the borehole, m2; \({D_B}\) is the size of the bit RPM, m.
-
(2)
The rate of penetration equation based on Motahhari model is as follows25.
Where \(RP{M_t}\) is the total bit RPM, r/min; \(WOB\) is the weight on bit, kN; \({D_B}\) is the bit diameter; S is the compressive strength of the rock; \(\gamma\) and \(\alpha\) is the ROP model coefficient, dimensionless; G is the coefficient determined by the bit geometry, the size of the cutting teeth, and the friction coefficient of the cutting teeth-rock; \({W_f}\) is the dimensionless wear and tear coefficient, which is set as a constant value based on the assumptions of the study.
Equation coefficient fitting
In the process of fitting the rate of penetration during composite drilling, both the MSE and Motahhari models involve unknown model coefficients. The determination of model coefficients in the drilling speed equation is essentially a parameter optimization problem, wherein the values of the model coefficients are continuously adjusted to minimize the mean square error between the predicted and actual values. This approach aims to better fit the model to actual data, thereby enhancing prediction accuracy. In the parameter fitting solution of the drilling speed equations for the two physical models, the least squares method is used in this study for the fitting solution of parameters39.
The least squares method determines the optimal model coefficients by minimizing the sum of squares of the residuals between the observed data and the theoretical model. The main steps are as follows:
-
1.
Extract parameters such as weight on bit, bit RPM, bit size, compressive strength and actual rate of penetration from the input data set.
-
2.
Define the objective function of the sum of squared residuals, which involves summing the squared residuals of all observed data to obtain a function of the coefficient vector.
-
3.
Solve for the optimal coefficient vector by taking the derivative of the objective function and making the derivative equal to zero.
-
4.
Utilize the solved coefficient vector to obtain the best model, calculate the rate of penetration using the given model coefficients, and calculate the mean squared error between the predicted and actual rate of penetration.
-
5.
Adjust the model coefficients in a way that minimizes the mean squared error, finding the optimal parameter values that minimize the objective function (mean squared error).
The least squares method is a common and effective fitting method that can be used for linear regression, nonlinear regression, and polynomial fitting problems. Its advantages are that it is simple to understand, easy to calculate, and can obtain optimal solutions under certain conditions. The parameter range of the rate of penetration equation is shown in Table 2.
Calculation of theoretical downhole weight on bit for sliding drilling
During the drilling process, it is often difficult to obtain confined compressive strength information. By making model assumptions and considering the onsite formation environment, this study sets the confined compressive strength in the dataset to 50 MPa, with a drill bit size of 241.3 mm at the construction site. In this scenario, the model assumes homogeneity in the formation, enabling it to learn the drilling speed patterns to some extent, which can be used to guide the prediction of drilling speed for the next phase.
During sliding drilling phase, only the motor of the screw rotates, and the screw drilling tool combination theoretically “lie” on the wall, applying downhole weight on bit by lowering the drilling tool, and driving the screw drilling tool’s RPM output by hydrodynamic energy, ultimately achieving rock breaking and trajectory control.
In composite drilling, the drill string is rotated by power provided by the power drilling tool superimposed on the screw drilling tool (Fig. 3a. b). Since the axial friction drag is negligible, the weight on bit measured on surface can be approximately equal to the downhole weight on bit (Fig. 3c)40,41. The parameters of the composite drilling phase are used to fit the ROP equation, after which the formula for the theoretical downhole weight on bit can be back calculation. Then the ROP equation fitted by the composite drilling phase is used to predict the ROP of the sliding drilling phase, and then the ROP of the sliding drilling phase is used to solve the theoretical DWOB of the sliding drilling phase. The actual measured drilling weight on bit is the SWOB, and the sliding drilling phase friction drag loss is the difference between the SWOB and the theoretical DWOB.

Diagram of drill string forces. (a) Directional drilling (b) Composite drilling (c) State of motion during composite drilling.
Obtain the bit RPM, bit size, confined compressive strength and rate of penetration during the sliding drilling phase data, and back-calculate the theoretical DWOB according to the rate of penetration equation established by Eq. (2). Theoretical axial friction drag (\({f_{_{{Axial}}}}\)) can be calculated from the difference between the SWOB and the theoretical downhole DWOB.
From this, the theoretical DWOB can be derived based on the ROP equation of the mechanical specific energy theory.
The axial friction drag of the drilling tool is then estimated in conjunction with the surface weight on bit.
Model validation
Based on the developed MSE and Motahhari models for composite drilling analysis, we obtained field data including bit specifications, surface weight on bit, rotary RPM, drilling fluid flow rate, and ROP. These parameters were systematically processed to reconstruct the downhole WOB and calculate friction values using the proposed methodology. Then the fitting of the theoretical downhole weight on bit for the composite drilling phase is carried out, after which the friction drag values under the two models are calculated according to the steps in the previous section, and the fitted real measurements are obtained as shown in Fig. 4.

Comparison of MSE and Motahhari models. (a) DWOB prediction; (b) Friction drag calculation results.
Based on the validation of onsite wellsite data in the selected blocks, the discrete friction drag was calculated by using the value of the change of the hook weight during the lifting and lowering of the hook during drilling, and the calculation of the friction drag by using the two physical models of MSE and Motahhari was compared (Table 3). The theoretical downhole friction drag calculated by the MSE and Motahhari models exhibits the same trend as the discrete friction drag derived from the hook load change (Fig. 5). Comparing the theoretically calculated friction drag with the measured friction drag demonstrates that these methods can effectively support the estimation of downhole weight on bit during sliding drilling.
Both the Mechanical Specific Energy (MSE) model and the Motahhari model show good stability, but they differ in their applicable ranges and respective strengths and limitations. The MSE model’s core advantage lies in its clear physical interpretation, where mechanical specific energy quantifies rock-breaking energy. The model is relatively simple, making it well-suited for evaluating drilling efficiency in homogeneous formations. In practical applications, the MSE model provides quick and effective friction estimates for sliding drilling, making it convenient for real-time monitoring and operational adjustments. However, its limitations are primarily in its low sensitivity to drilling column dynamics and potential inaccuracies in complex, heterogeneous formations. In contrast, the Motahhari model enhances its nonlinear mapping capability by incorporating multiple model coefficients, allowing it to capture more detailed drilling dynamics in complex drilling processes. The model performs better in handling soft-hard alternating formations and complex wellbore-drillstring interactions. Therefore, the Motahhari model is better suited for more complex geological conditions, offering more accurate friction predictions. However, one of its main drawbacks is the increased complexity, which raises computational difficulty and requires frequent parameter adjustments to maintain stability and accuracy. This high complexity also leads to weaker extrapolation capabilities, particularly in cases with sparse data or uncertain geological environments.
Overall, both the MSE and Motahhari models have their specific use cases, but their collaborative application can create a complementary advantage, further enhancing the accuracy and reliability of friction prediction. The MSE model provides quick trend alerts, especially in stable formations or for real-time monitoring, effectively predicting the trend of frictional changes and facilitating timely adjustments to drilling parameters. On the other hand, the Motahhari model, with its complex nonlinear relationships, is capable of uncovering the friction evolution mechanisms in the drilling process, particularly suited for more complex geological environments and heterogeneous reservoirs. By combining the trend alerts of the MSE model with the mechanistic inversion of the Motahhari model, the dual-model framework can comprehensively reflect the dynamic process of friction changes, providing more accurate and reliable support for sliding drilling. This dual-model approach offers a flexible solution for friction evaluation across different drilling stages and geological conditions, effectively improving drilling efficiency and safety. In general, the method of utilizing the MSE and Motahhari ROP model to back-calculate bottom hole drilling pressure and frictional resistance is feasible.

Discrete friction drag of the hook load and Calculation of friction drag with MSE and Motahhari model.
Results and discussion
The method proposed in this study was applied during the construction of a directional well in the Sichuan Basin, China. A total of 5 sliding drilling operations were conducted in the well section from 4860.00 m to 4995.00 m. Based on the estimation of downhole weight on bit using the drilling parameters and rate of penetration during the sliding drilling phase, combined with the weight on bit measured to estimate the axial friction drag of the drilling tool, the method has already been implemented in the Puguang Gas Field. The analysis of the friction during the 5 sliding drilling operations is shown in Figs. 6 and 7.

Analysis of friction drag during the sliding drilling phase from 4860.00 m to 4900.00 m. (a) MSE; (b) Motahhari.

Analysis of friction drag during the sliding drilling phase from 4950.00 m to 4994.00 m. (a) MSE; (b) Motahhari.
The friction drag during the five sliding drilling phases carried out in the engineering on-site application experiment was analyzed (Table 4). During the sliding drilling stages of well Sects. 1, 2, and 4, the friction drag exhibited an approximately linear increase with depth, with the maximum weight on bit reaching 312 kN. However, the overall sliding performance remained unsatisfactory. Field analysis indicated that the primary cause was a significant differential pressure at the bottom hole, resulting in drillstring sticking and preventing effective weight transfer to the bit. This led to buckling of the heavy-weight drill pipe (HWDP) or the drill pipe itself, thereby increasing downhole friction drag. This phenomenon was reflected in the model inversion results as a sharp rise in calculated friction drag, demonstrating the sensitivity of both models to complex downhole conditions. In contrast, the friction drag in well Sects. 3 and 5 remained relatively low, suggesting that improvements in drilling fluid lubricity had a positive impact on downhole friction conditions. However, toward the end of Sect. 5, a renewed increase in friction drag was observed, indicating that differential pressure effects remained significant. This is particularly pronounced under conditions of insufficient control over mud density or poor wellbore stability, potentially causing localized sticking and increased friction. Notably, after drilling to 4885.00 m in Sect. 2, the implementation of rotary drilling combined with the use of a downhole motor, followed by a return to sliding drilling, resulted in a significant reduction in friction drag. Specifically, from the end of Sect. 1 to the beginning of Sect. 2 (4878–4881 m), the friction drag calculated by the MSE and Motahhari models decreased by 65.13% and 90.15%, respectively. From Sect. 2 to Sect. 3, the reductions were 5.32% and 3.86%, while from Sect. 4 to Sect. 5, the values dropped by 26.41% and 24.99%, respectively. These quantitative results highlight the effectiveness of mechanical disturbance in alleviating sticking and restoring proper weight-on-bit transfer. Corresponding patterns of sudden friction reduction were also observed in both models, showcasing the dual-model framework’s capability in identifying transient operational conditions. Overall, the variation in friction drag across different well sections is influenced by multiple factors, including bottom hole pressure differentials, drillstring stability, and drilling fluid properties. The MSE model provides rapid detection of abnormal friction trends, while the Motahhari model offers in-depth insight into nonlinear frictional mechanisms. Their combined use enables comprehensive tracking of friction evolution by integrating both trend identification and mechanistic interpretation. This approach offers robust theoretical support and practical guidance for optimizing sliding drilling parameters and improving trajectory control.
The proposed dynamic evaluation method, which integrates mechanical specific energy and real-time drilling pressure inversion algorithms, captures friction anomalies at the hard-soft formation transition zone, offering an effective analytical tool that does not rely on downhole measurement instruments. The study shows that the buckling state of the drill string and changes in drilling pressure significantly influence friction drag reversal, especially under low drilling pressure conditions where phase reversal of friction drag is more pronounced. Although the current model assumes formation homogeneity, it still identifies and reflects the impact of interface effects on friction by adaptively adjusting drill string dynamics parameters. In the future, the acquisition of more distributed downhole measurement data and the incorporation of sonic logging data for formation impedance profile inversion will further enhance the model’s accuracy and applicability, providing a more comprehensive theoretical framework for friction drag control in complex formation environments.
Based on the above analysis, the following recommendations are provided for the issues of high friction drag and difficulty in directional drilling during the sliding drilling phase:
-
(1)
Improving the lubricity of drilling fluid can help alleviate friction drag during sliding drilling. However, due to the significant impact of bottom hole pressure difference, the risk of back pressure remains high. Therefore, it is recommended to closely monitor the footage during the sliding process and avoid prolonged static periods of the drilling tools.
-
(2)
In cases of differential sticking, continuously increasing the weight on bit may lead to heavy wall drill pipe (HWDP) and drill pipe buckling. It is recommended to increase the weight on bit to 250kN during the sliding process. If this is ineffective, promptly activate the drilling tool and engage in appropriate rotary drilling to disrupt the mud cake and reduce the risk of sticking.
-
(3)
Due to the significant friction drag during the sliding drilling phase and the uneven transfer of weight on bit, there is a risk of instantaneous high weight on bit on the bottom hole drill bit and downhole motor. This is not conducive to protecting the tool’s lifespan. It is recommended to supplement lubricants appropriately before directional drilling to reduce the load on the bottom hole drilling tool.
During on-site construction, timely measures such as supplementing lubricants and controlling surface weight on bit can improve the sliding effect. Following the addition of lubricants, the axial friction drag decreased by approximately 40kN, and the weight on bit decreased from 260kN to 210kN. This effectively improved the sliding drilling efficiency, enhanced the condition of the drilling tools load under pressure at the bottom of the well, and prevented complex issues such as differential sticking and severe wear of the bit.
Conclusions
In horizontal well drilling, the continuous increase in friction can lead to tool damage and significantly affect drilling efficiency. This study employs the composite directional drilling technique and integrates the friction drag evaluation method proposed for the sliding drilling phase. The method helps to promptly identify and make adjustments to the friction drag on-site, thereby enhancing drilling performance.
-
(1)
The study introduces a novel method that utilizes the rate of penetration equation in conjunction with back-calculating of downhole weight on bit and friction drag to effectively reflect the rock-breaking pattern under low weight on bit conditions. This approach enables the dynamic analysis of sliding drilling efficiency and quantitative estimation of friction without the need for without downhole engineering parameter measurement pup joint. It can provide theoretical support for optimizing drilling efficiency, improving bottom hole drilling tool load, and evaluating the effectiveness of friction reduction tools.
-
(2)
By utilizing the composite directional drilling technique and incorporating the friction drag evaluation method proposed in this study for the sliding drilling phase in directional well, timely adjustments to the friction drag during the sliding drilling phase can be adjusted. This is of paramount significance in improving the capability of downhole directional drilling, realizing rapid drilling and drilling risk prevention and management in advance.
-
(3)
The proposed dynamic evaluation method, integrating mechanical specific energy and real-time drilling pressure inversion algorithms, effectively captures friction anomalies at the hard-soft formation transition zones. This method provides a tool-free approach for friction drag analysis, which is crucial in complex downhole conditions. By adjusting the drill string dynamics parameters adaptively, the model successfully identifies the impact of interface effects on friction, particularly in conditions of low drilling pressure where friction drag reversal is more pronounced.
-
(4)
The analysis of the friction drag during the sliding drilling phases in well Sects. 1, 2, and 4 showed significant increases due to differential pressure and buckling of the drillstring. However, improvements in the lubricity of the drilling fluid positively impacted friction drag reduction in well Sects. 3 and 5. The friction drag reduction was particularly notable after the implementation of rotary drilling in conjunction with a downhole motor, which resulted in a sharp decrease in friction drag in specific sections, demonstrating the effectiveness of mechanical disturbance in alleviating sticking issues and improving weight transfer to the bit.
The innovation of this study lies in the development of a friction drag inversion algorithm tailored for sliding drilling conditions, particularly offering a tool-free friction evaluation method in the absence of downhole pup joints. The method has already undergone preliminary field validation. However, its reliance on the assumption of formation homogeneity poses certain limitations when applied to complex geological conditions. Future work will focus on acquiring more spatiotemporal data on downhole friction evolution and integrating advanced machine learning techniques to further enhance the model’s accuracy and adaptability, thereby promoting its broader application in drilling engineering.
Data availability
The raw data supporting the conclusions of this article will be made available by the authors on request. For further inquiries, please contact the corresponding author, T.W.
References
Song, Y. et al. Progress and development trend of unconventional oil and gas geological research. Pet. Explor. Dev. 44, 675–685 (2017).
Wang, H. et al. Assessment of global unconventional oil and gas resources. Pet. Explor. Dev. 43, 925–940 (2016).
Liu, Y., Ma, T., Chen, P. & Yang, C. Method and apparatus for monitoring of downhole dynamic drag and torque of drill-string in horizontal wells. J. Petrol. Sci. Eng. 164, 320–332 (2018).
Shi, X., Huang, W., Gao, D., Zhu, N. & Li, W. Extension limit analysis of drillstring with drag reduction oscillators in horizontal drilling. Geoenergy Sci. Eng. 228, 211996 (2023).
Choe, Y. M. et al. Influence of torsional stick-slip vibration on whirl behavior in drill string system. Geoenergy Sci. Eng. 227, 211931 (2023).
Noabahar Sadeghi, A., Arıkan, K. B. & Özbek, M. E. Modelling and controlling of drill string stick slip vibrations in an oil well drilling rig. J. Petrol. Sci. Eng. 216, 110759 (2022).
Tang, L., Guo, B., Kapitaniak, M., Vaziri, V. & Wiercigroch, M. Finite element analysis of drill pipe-slip system. J. Petrol. Sci. Eng. 220, 111163 (2023).
Elgibaly, A. A., Farhat, M. S., Trant, E. W. & Kelany, M. A study of friction factor model for directional wells. Egypt. J. Petroleum. 26, 489–504 (2017).
Liu, X., Meng, G. & Balachandran, B. Drill-string stability and stress localization: influence of complex delay effects and dry friction. Int. J. Non-Linear Mech. 157, 104559 (2023).
Sánchez, L., Lapo, M. & Zorrilla, O. Torque and drag analysis of a drill string using sequential Monte Carlos methods. J. Petrol. Sci. Eng. 173, 1–12 (2019).
Shi, X., Huang, W. & Gao, D. Mechanical models of drillstrings with drag reduction oscillators and optimal design methods of vibration parameters in horizontal drilling. Geoenergy Sci. Eng. 224, 211585 (2023).
Zou, J., Wang, X., Wang, Y., Liu, Y. & Chen, P. Modeling and friction response analysis of rocking-sliding friction of drill string in directional wells. Tribol. Int. 193, 109466 (2024).
Li, Q. et al. Wellhead stability during development process of hydrate reservoir in the Northern South China Sea: evolution and mechanism. Processes 13, 40 (2025).
Li, Q. et al. The crack propagation behaviour of CO2 fracturing fluid in unconventional low permeability reservoirs: factor analysis and mechanism revelation. Processes 13, 159 (2025).
Ma, Z. et al. Interpretable automated machine learning workflow for intelligent drilling in the petroleum industry: case study on rate of penetration prediction. SPE J. 1–20. https://doi.org/10.2118/226195-PA (2025).
Ma, Z. et al. Intelligent prediction of rate of penetration through meta-learning and data augmentation synergy under limited sample. Geoenergy Sci. Eng. 250, 213818 (2025).
Pei, Z. J. et al. Interpretation and characterization of rate of penetration intelligent prediction model. Pet. Sci. 21, 582–596 (2024).
Li, G., Song, X., Tian, S. & Zhu, Z. Intell. Drill. Completion: Rev. Engineering 18, 33–48 (2022).
Zhang, H. et al. How to land modern data science in petroleum engineering. in Day 3 Thu, October 14, 2021 D031S025R003 (SPE, Virtual, doi:https://doi.org/10.2118/205689-MS. (2021).
Kuang, L. et al. Application and development trend of artificial intelligence in petroleum exploration and development. Pet. Explor. Dev. 48, 1–14 (2021).
Boukredera, F. S. et al. Enhancing the drilling efficiency through the application of machine learning and optimization algorithm. Eng. Appl. Artif. Intell. 126, 107035 (2023).
Ahmed, O. S., Adeniran, A. A. & Samsuri, A. Computational intelligence based prediction of drilling rate of penetration: A comparative study. J. Petrol. Sci. Eng. 172, 1–12 (2019).
Bourgoyne, A. T. & Young, F. S. A multiple regression approach to optimal drilling and abnormal pressure detection. Soc. Petrol. Eng. J. 14, 371–384 (1974).
Caicedo, H. U., Calhoun, W. M., Ewy, R. T. & Unique ROP predictor using Bit-specific coefficient of sliding friction and mechanical efficiency as a function of confined compressive strength impacts drilling performance. In (OnePetro, 2005). https://doi.org/10.2118/92576-MS
Motahhari, H. R., Hareland, G. & James, J. A. Improved drilling efficiency technique using integrated PDM and PDC bit parameters. J. Can. Pet. Technol. 49, 45–52 (2010).
Moran, D., Ibrahim, H., Purwanto, A., Osmond, J. & Sophisticated, R. O. P. Prediction technologies based on neural network delivers accurate Drill time results. in All Days SPE-132010-MS (SPE, Ho Chi Minh City, Vietnam, doi:https://doi.org/10.2118/132010-MS. (2010).
Ashrafi, S. B., Anemangely, M., Sabah, M. & Ameri, M. J. Application of hybrid artificial neural networks for predicting rate of penetration (ROP): A case study from Marun oil field. J. Petrol. Sci. Eng. 175, 604–623 (2019).
Brenjkar, E. & Biniaz Delijani, E. Computational prediction of the drilling rate of penetration (ROP): A comparison of various machine learning approaches and traditional models. J. Petrol. Sci. Eng. 210, 110033 (2022).
Tunkiel, A. T., Sui, D. & Wiktorski, T. Impact of data pre-processing techniques on recurrent neural network performance in context of real-time drilling logs in an automated prediction framework. J. Petrol. Sci. Eng. 208, 109760 (2022).
Zhang, C. et al. Real-time and multi-objective optimization of rate-of-penetration using machine learning methods. Geoenergy Sci. Eng. 223, 211568 (2023).
Wan, Y. et al. Intelligent prediction of drilling rate of penetration based on Method-Data dual validity analysis. SPE J. 1–18. https://doi.org/10.2118/217977-PA (2023).
Hegde, C., Daigle, H., Millwater, H. & Gray, K. Analysis of rate of penetration (ROP) prediction in drilling using physics-based and data-driven models. J. Petrol. Sci. Eng. 159, 295–306 (2017).
Cao, W., Mei, D., Guo, Y. & Ghorbani, H. Deep learning approach to prediction of drill-bit torque in directional drilling sliding mode: energy saving. Measurement 250, 117144 (2025).
Yin, H., Zhao, X. & Li, Q. Research on adaptive prediction model of rate of penetration under dynamic formation conditions. Eng. Appl. Artif. Intell. 133, 108281 (2024).
Shi, X., Huang, W. & Gao, D. Optimal design of drag reduction parameters with the rotary reciprocating control system and hydraulic oscillators in sliding drilling. Geoenergy Sci. Eng. 243, 212856 (2024).
Hareland, G., Wu, A. & Lei, L. The field tests for measurement of downhole weight on Bit(DWOB) and the calibration of a Real-time DWOB model. In IPTC-17503-MS (2014). https://doi.org/10.2523/IPTC-17503-MS
Wu, A. & Hareland, G. Calculation of Friction Coefficient And Downhole Weight On Bit With Finite Element Analysis of Drillstring. in ARMA-2012-195 (2012).
Zha, Y., Ramsay, S. & Pham, S. Real Time Surface Data Driven WOB Estimation and Control. in Day 2 Tue, September 25, D021S009R003 (SPE, Dallas, Texas, USA, 2018). D021S009R003 (SPE, Dallas, Texas, USA, 2018). (2018). https://doi.org/10.2118/191723-MS
Menke, W. Review of the generalized least squares method. Surv. Geophys. 36, 1–25 (2015).
Aadnoy, B. S., Fazaelizadeh, M. & Hareland, G. A 3D analytical model for wellbore friction. J. Can. Pet. Technol. 49, 25–36 (2010).
Ugochukwu, O. & Verity, S. Using robust torque and drag modelling software for efficient well planning and operations monitoring. Paradigm Sysdrill for OML 126 wells – A case study. in All Days SPE-172388-MS (SPE, Lagos, Nigeria, doi:https://doi.org/10.2118/172388-MS. (2014).
Acknowledgements
This study was supported by the National Key Research and Development Project of China (No.2019YFA0708300), Science Foundation of China University of Petroleum, Beijing (No. 2462023BJRC025) and Key Laboratory of Shale Gas Exploration, Ministry of Natural Resources (Chongqing Institute of Geology and Mineral Resources), Chongqing, China (No. KLSGE-202202).
Author information
Authors and Affiliations
Contributions
Conceptualization, Z.M., H.Z., G.L., and S.T.; Methodology, Z.M. and H.Z.; Validation, Z.M. and H.Z.; Formal analysis, Z.M., H.Z., H.H., and T.W.; Investigation, Z.M., S.T., and Y.Z.; Writing—original draft, Z.M. and H.Z.; Writing—review & editing, Z.M., H.H., and T.W.; Project administration, G.L. and S.T.; Funding acquisition, S.T., Y.Z., and T.W.; Supervision, T.W. All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Ma, Z., Zhang, H., Hu, H. et al. An analytical model for quantitative evaluation of friction drag in directional sliding drilling. Sci Rep 15, 17906 (2025). https://doi.org/10.1038/s41598-025-03171-9
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-03171-9
