
Abstract
The estimation of user or object location in an indoor environment is in high demand nowadays. Indoor Navigation Systems (INS) have utmost importance in large shopping malls, hospitals, universities, airports, etc. Many Indoor Positioning Systems (IPS) have been developed nowadays to enable several types of location-based services. One of the most prominent techniques is the fingerprinting technique, which plays a significant role in estimating the user’s indoor location. In this technique, the fingerprinting database is generated by human experts involving fingerprint collections from indoor places, thereby making it a labor-intensive task. As a result, the calibration cost of the database becomes very high, and it affects the adaptability of this technique. To minimize the survey cost, many techniques have been proposed by researchers, such as the automated generation of a fingerprinting database. These techniques mainly revolve around 2D-based path loss heat maps and thus ignore the height information, such as the z-axis. We have proposed a systematic approach to estimate the indoor location of an object/user by generating 3D path loss heat maps. These 3D-based path loss Received Signal Strength (RSS) values incorporate height parameters as well to estimate the user/object location in an indoor 3D environment. Extensive experiments are performed, and the results outperform the manual and existing techniques by estimating the indoor position more accurately in the 3D indoor environment. Moreover, the 3D path loss RSSI heat maps have been generated without much effort by using the 3D path-loss technique, which has better accuracy than the manual technique. Using the proposed approach, the 1-meter error is obtained for 20% of the cases, and the 2-meter error in the cases 40%, which is better than the manually gathered database.
Similar content being viewed by others


Introduction
In today’s era, the Internet of Things (IoT) is in high demand. A lot of work is being done in smart cities, smart factories, etc. The need for indoor positioning systems has increased in these scenarios. It is an essential need for smart cities, large shopping malls, etc., to have indoor positioning systems implemented, enabling the user to find the location of objects, etc., in an indoor environment. As we know, the global positioning system (GPS) has been used for a long time to estimate the user’s location, but its usage is only restricted to the outdoor environment. The GPS cannot work well inside buildings due to the walls, concrete, and attenuation factors. For example, if we are in a shopping mall and want to get the location of a particular shop in this shopping mall, the GPS does not work in this case. The GPS can only tell us the location of this shopping mall, not the shop in the shopping mall. The Indoor Navigation Systems (INS) are used in this case. Indoor Positioning Systems (IPS) consist of a network of devices to estimate the user/object location, where GPS-based techniques do not work well or entirely fail.
INS is becoming increasingly significant for many indoor environments. They not only help the visitors to find a location but also provide immense help to the building workers, managers, coordinators, etc. In addition, in large hospitals, it becomes very problematic for visitors to find a specific location. IPS can also provide immense help to the hospital staff to find their equipment in stressful and urgent situations. In smart offices, indoor positioning systems are of high significance in finding conference rooms, equipment, offices, etc. The office staff can also find their equipment in the offices in a very short amount of time. In large shopping malls, it becomes difficult for the new visitor to find a particular shop or product. Similarly, it can also help the shopkeepers to get useful data about how much time a customer stays at a shop, etc. This data can help a lot in making marketing strategies. It can also help the shopkeepers send advertisements to the nearby customers about their products. Smart technologies are also being implemented in different universities to make the universities more technology-friendly, enjoyable, and connected places. It provides immense help for the students and the visitors and is significant for the security of the university campuses. Indoor Positioning Systems can provide immense help in airports and car parks as well.
There has been significant work done in IPS, but the accuracy of most of these techniques is low and requires further efforts. A prominent level of accuracy is provided by Bluetooth, radio-frequency identification (RFID), radio sensors, etc. However, these are expensive infrastructure-based techniques. IPS based on such sensors requires a dedicated infrastructure installed in the area of positioning, which increases their cost. The infrastructure-based techniques become less attractive due to these disadvantages. Consequently, infrastructure-less techniques are in high demand due to low costs, and the researchers prefer to use these techniques. Many researchers are attracted to indoor positioning systems due to the usage of Wireless Local Area Networks (WLAN) in universities, offices, etc. Different techniques such as WiFi signals1, Light Emitting Diode (LED)2, and imaging scene3 are infrastructure-less techniques. As there is a large usability of wireless-based devices. The shopping malls, schools, universities, hospitals, and public places have WiFi infrastructure available. Due to this advantage, the demand for the WiFi-based IPS has increased.
Fingerprinting is one of the most widely used techniques to estimate location in an indoor environment. In this technique, the experimental area is divided into small portions of a few feet, like one meter. The received signal strength indicator (RSSI) values against different WiFi Access Points (APs) are collected on dedicated points called ground truths and stored in the database. These RSSI values are compared with the RSSI received at the user’s location, and the estimated location of the user in the indoor environment is calculated. Database calibration is a laborious task in fingerprinting-based indoor positioning. The survey cost of the WiFi environment becomes very high due to this problem, and thus, it becomes very costly to adopt this technique. The process to automate the collection of RSSI values in the entire indoor environment already exists. LOCALI4 uses the map information to calculate the RSSI values at each location of the indoor environment. The RSSI heatmaps are generated based on these RSSI values, and thus, they eliminate the manual collection of RSSI values to store in the database. The heat maps generated by this approach are 2D, and this causes a restriction to cover the z-axis for the indoor navigation of an object or user. As this technique is 2D, the stairs, height, and multi-floor cases are ignored as only the x and y axes are covered in 2D-based approaches. To calculate the path loss according to the real-world scenario, the height parameter is of utmost importance, and thus it cannot be ignored.
Problem statement
Fingerprinting techniques require the collection of data on various points in an experimental area. A lot of time is taken to collect the fingerprinting data in this area, especially when the area is large, for example, in the case of shopping malls, universities, etc. Due to this drawback, the database calibration task becomes very laborious, such that it requires a large amount of time and effort. It causes the adaptability problem for this technique due to the high cost of the survey of the WiFi environment.
Some 2D solutions based on path loss exist to automate the survey and calibration of the WiFi environment. For example, LOCALI4 automates the fingerprinting process for indoor location estimation by using architectural map information. The path loss model is used to generate the 2D heat maps based on the automatically generated RSSI values. Some other 2D-based techniques also exist to automate the fingerprinting process. However, in these techniques, only the x and y-axis are considered to avoid the complexity of the generation process while ignoring the elevation parameter, i.e., the z-axis. In high-roof buildings, the WiFi APs can be at a good height. In such cases, the height factor is of utmost importance. Similarly, for multistory buildings, it is important to include the z-axis to generate 3D path loss heat maps to estimate the user location. These high-roof and multistory environments enforce the consideration of elevation of radio source to generate more accurate 3D radio maps for a fingerprinting database, to enable effortless IPS in a WiFi environment.

Visualization of generated 3D RSSI mapping using data from Access Point 4 (AP4). (a) illustrates RSSI distribution across various horizontal layers, showing signal strength variation with height. (b) displays a specific cross-section at \(Z \approx 60\), highlighting signal propagation within a specific horizontal plane. In both figures, warmer colors indicate higher RSSI values.
Contributions
In this work, the indoor position is estimated by generating the 3D path loss heat maps in a systematic way. By using map information, the 3D heap maps are constructed for the WiFi environment. The height of the WiFi environment is also included as x, y, and z axes are covered while constructing the 3D environment. In this approach, to record the RSSI values of the 3D WiFi environment, the path loss model is used. The path loss technique is commonly used and popular in recording the RSSI values of the 3D WiFi environment and thus provides immense help in generating the 3D path loss heat maps for the 3D environment. The result is estimated by selecting 14 distinct locations in the WiFi environment and comparing manually selected RSSI values on these locations with the RSSI values generated automatically by the path loss model. The root mean square error (RMSE) is calculated at the end. The main objectives of this research work can be summarized as
-
Effortless 3D map generation for fingerprinting-based approach of indoor positioning in a 3D environment as shown in Fig. 1,
-
RSSI environment maps generation by using the path loss model,
-
Position estimation using RSSI-based 3D environment maps,
-
Comparison of results with other indoor navigation approaches.
-
This study requires data collection for initial database formulation only. Contrary to other approaches, which require data collection for calibration in case of any change in AP’s position, no data collection is needed with the proposed approach.
This research work is divided into five sections. Section Review of literature presents the literature review related to this study. Section Materials and methods consists of the materials and methodology for the generation of fingerprinting databases (manual and automated) and the estimation of user location in the 3D environment. Section Results and discussions presents a detailed discussion of results based on different AP settings. At the end, the conclusions and recommendations are described in Section Conclusions.
Review of literature
In recent years, researchers have developed many WiFi RSSI-based indoor positioning techniques, such as channel state information (CSI) signals, and RSSI-combined5, RSSI6, the WiFi CSI7 and Time of Arrival (ToA) of signals8. To give a broad overview of the IPS, some existing techniques have been discussed here.
General techniques
In the study9, RFID is used to locate different objects inside a building. The study used a technique called reference tags to increase the accuracy of the object landmarks inside a building. This study suggests that RFID technology is basically not used for indoor positioning, but they have used three concepts to utilize this technique for indoor location estimation. This approach can be useful in today’s growing market.
In another study,10 utilized a Bluetooth-based indoor positioning system. This method has been tested in different scenarios and shows significant results. For this system, the range has been estimated on the basis of the distance between sending and receiving devices and the approximation of RSSI. The authors utilize various ranges for Bluetooth. Then the triangular method is used to estimate the approximate position. In another paper11, the importance of location awareness in today’s advanced age is discussed. The authors have used a radio-based approach for indoor positioning. The focus is to get rid of existing positioning systems and design a cost-effective approach that can be utilized effectively. In their approach, the position is estimated by using cell phones and laptops, and they can do it by listening to the cell IDs, such as APs, or referencing the position in a database or a cached database. They claim that they have achieved a 20 to 30-meter median accuracy for large indoor buildings.
In12, the authors point out that most of the positioning systems contain two main parts: the first part is the map, and the second part is the positioning system, with the help of which we can identify the position on the map. This paper tells us about one of the main issues with indoor positioning, i.e., a reliable and accurate map with the help of which we can easily identify the position. It is one of the major drawbacks of indoor positioning. The authors also discuss some other errors in indoor positioning using WiFi networks. These errors include a lack of a good map and navigation errors. The authors propose a system location map, which helps to construct maps for indoor positioning. The study13 presents three methods for RSSI radio map generation using a mobile app, biharmonic spline interpolation, and Wireless InSite simulator to simulate the wireless environment. These methods offer a reduction in time for data collection. In14, a low-cost solution for indoor positioning is proposed based on sensor architecture. Integration of machine learning models helped get better positioning accuracy. Along the same lines, the study15 offers a more accurate position estimation to be used for applications that require social distancing. With a 96.1% acceptance rate, the mean localization error is less than 6 meters.
A promising application of indoor positioning is robot navigation, which requires precise location information. The study16 presents a similar approach for indoor navigation and reports a high accuracy of 0.51 meters. Hybrid approaches tend to show promising results, particularly for indoor positioning. The authors present a hybrid range-free approach in17 using a ZigBee network. The proposed system offers a low-cost and low-energy consumption solution.
The study18 introduces a method to overcome the errors in calculating the received signal strength (RSS) values in indoor positioning. The study uses the concept of statistics using invariant RSS. This method collects the RSS distribution at various locations of calibration using random time disturbances. This method collects data that serves as the class of reference for the fingerprinting. To carry out fingerprinting, the points are found at various unknown locations. The main advantage of this method is that recalibration is not needed, i.e., it removes the need for any further recalibration. This method gets good accuracy, i.e., about 17% high accuracy as compared to the previous methods used for indoor navigation. Another major advantage of using this method is that there is about 40% finer resolution as compared to other methods. Similarly,19 gets the position of different users, using the RSS at different locations with respect to each AP. The authors use a path loss prediction model, and instead of finding all the sample points, this method needs only a few samples. This method reduces the time to collect data using fingerprinting. Then the authors tested their method in a real-world environment. The method successfully retains the original accuracy to find the location in less time and effort. Positioning error is reduced using the proposed approach.
Crowdsourcing-based Systems
In20, the authors introduce a new technique named FreeLoc. This is an efficient technique that addresses three major issues using crowd-sourced indoor navigation systems. The first is to get RSS values in a relatively short time. Secondly, it uses calibration-based fingerprinting techniques across various mobile devices. Thirdly, even if a large amount of data is being uploaded, it maintains only a single averaged value for each location on the map. The authors evaluated their new method using four different smartphone devices. The approach provides good accuracy even if there are different devices.
Similarly,21 proposes an approach called walkie-markie. It is a state-of-the-art technique to automatically construct pathway maps of the building without having any prior knowledge about the building. The map includes different floor plans and access point locations. Using this technique, mobile devices have been used to get data from different WiFi marks, which are obtained from sensors of the mobile devices. These WiFi marks are embedded with the 2D map planes, and then they are connected with the user trajectories. Their experiment shows a fully constructed pathway map of the building after 5 to 6 walk rounds. They show that the accuracy improves gradually on the basis of the available user data, i.e., the more user data, the more accuracy. They show that the maximum error is between 2.8 and 3 meters.
In22, the author shows the usage of map information in wireless local area networks to navigate indoor positions correctly. The authors describe the usage of map information in various places, including data generation, map generation, tracking, estimating the accurate RSS, and semantic navigation and positioning. In the next step, the author describes the method of the model and implements the indoor map correctly in order to use it in intelligent algorithms for accurate location estimation. In the study23, the path loss enhancement technique is proposed to improve the accuracy of the indoor positioning with respect to the RSS and distance. The authors also show their results with regard to the position estimation, where the mean error between the line of sight (LOS) is 2.3 meters and 2.9 meters for the non-line of sight (NLOS) environments.
3D-based systems
In24, 3D maps are generated using a robot made up of light detection and ranging (LiDAR), a camera, and a laptop computer. It uses a two-wheeled robot. The wheels are used to control the movements of the robot. The environment is detected by ultrasound and infrared sensors. The operating system used by the robots is the robotics operating system (ROS). This robot detects the point cloud in the 3D environment, and then a 3D map is generated. The methodology includes image point matching and 3D image generation using RGDDSLAM. It extracts scale-invariant feature transform (SIFT) features from the image. It includes x, y and z coordinates. In this sense, we can say that it is near to a 3D map, but it only contains point clouds. After the 3D map is generated, the authors send the robot to one of the offices, and the robot obtains the acquisition points by comparing these points and the error; the author gets an estimated position.
The authors discuss different parameters necessary for accurate indoor positioning in25. As in the 3D maps, we consider the z coordinates as well to fulfill positioning requirements with respect to the user height or height of roof buildings. The authors propose methods for route guidance that contain the required parameters. The authors’ data show that 3D maps are far better as compared to 2D techniques as they fulfill spatial understanding quite efficiently. For horizontal structures, the 2D maps are almost as good and efficient as 3D maps; however, for vertical structures, we need additional information such as the floor number. The proposed approach uses various landmarks to build a 3D indoor map for accurate positioning.
In26, the authors propose a deep learning-based cooperative architecture, called DELTA, that uses a 3D fingerprinting map for indoor navigation. The authors used the 5G technique for this purpose. In the near future, the 5G wireless technology will be used by everybody, so it will become very easy to track assets, persons, etc. The fifth-generation wireless technology will also be integrated with other technologies such as WiFi, IoT, etc. The authors have proposed an experimental 5G test bed for indoor positioning. The proposed DELTA estimates the 2D map, then the 3D mobile station location is estimated using the 2D map. The proposed model has better performance compared to SVM.
Model-based systems
The model-based system presented in27 uses crowd-sensing and indoor canyon environments to overcome crowd-sourcing absorption effects on WiFi signals with the help of neural networks. An artificial neural network (ANN)-based indoor positioning system28 is used to overcome the problems of multi-path effects in the RSSI signals caused by signal collision, reflection, refraction, and diffraction. To improve the accuracy and make the system easily identify the user/object location in the indoor environment, a deep neural network-based localization approach is used in29. A semi-supervised-based time-series algorithm is presented in30. This approach provides good accuracy in estimating the location of the user/object as compared to the traditional RSSI signal-based indoor positioning systems. The localization system is presented in31 to improve indoor localization problems. The real-time implementation is improved by using this localization system.
Materials and methods
This section contains detailed information about infrastructure, dataset, data preprocessing, and the complete methodology.
Infrastructure and access point configuration details
The study was conducted in the Arfa Karim Tower at the University of Gujrat, comprising three floors (ground, first, and second). Testing focused on hallways (18m \(\times\) 15.4m \(\times\) 8.4m per floor) to avoid signal interference from dense classroom obstructions (e.g., computer clusters). The architectural map of one of the floors is displayed in Figure 2.

Architectural map of the ground floor, Arfa Karim block, University of Gujrat.
Access point deployment
Out of 11 Access points, we selected 8 from the ground and first floors for experimental purposes. Floor-wise details of access points is given in Table 1.
Configuration
The following configurations are used.
-
Manufacturer/Model: Cisco AIR-AP1542I-H-K9 (802.11ac Wave 2, dual-band)
-
Transmit power: 20dBm (2.4GHz), 23dBm (5GHz)
-
Channel allocation: Non-overlapping (1, 6, 11 for 2.4GHz)
-
Antenna gain: 4dBi omnidirectional
The hardware setup included a Samsung A5 smartphone for data collection, an HP ZBook 15 G3 (Intel Xeon E3-1505M v5, 16GB RAM), and a custom Python toolkit (v3.9) with Scapy for fingerprint database generation and 3D and RSSI map generation processing.
Data collection
The ground floor and the first floor are selected for data collection. Using Matlab, each floor plan is divided into grid blocks of 1-meter square to mark the center as a reference point for the purpose of data collection. Only 129 reference points are selected for each floor from the corridors. Data are collected manually on these 258 reference points using a smartphone held by a person at chest level while the screen faces toward the eyes. To collect the data on these points, an Android application, “Get Sensor Data”32, has been used. To collect the data at the particular reference point, the data collection operator stands firmly at each point and scans the WiFi environment using the start and stop scan buttons provided by the application. The application generates a file with respect to each point of the floor plan. The data is stored in a text file containing information about sensors such as WiFi, along with BSSID, RSSI, timestamp, etc. This data will be processed, and only WiFi-based RSS values will be stored in a single database file in the processing phase.

Pixel map containing manual data gathering points on the ground floor.
Figure 3 represents the pixel map of the ground floor containing 129 red circles, while Fig. 4 represents the pixel map of the first floor containing 129 black circles. This pixel map was constructed using the MS Paint application for ease instead of using a sophisticated image processing application like “Adobe Photoshop” or ‘Autocad”. The architectural map was taken and converted to a pixel map. Different architectural parameters were drawn on this pixel map in the form of different intensity values for doors, windows, open spaces, walls, etc. During manual collection of the data, it is observed that the data is collected against 50 different APs, but 8 APs at different permanent locations have been selected, and the temporary APs, such as the mobile WiFi access points, etc., have been ignored. The 4 hollow circles represent the selected APs on this floor.

Pixel map containing manual data gathering points on the first floor.
Data transformation
The data collected manually is stored in multiple text files. Each text file represents one point in the experimental environment. These text files contain a lot of raw data from different sensors such as accelerometer, gyroscope, magnetometer, WiFi, etc., as shown in Fig. 5, requires filtering out.

Raw data collected on one of the points on the experimental floor plan.
As only WiFi data is required in this research, it is retrieved from these text files, and all the retrieved data along with corresponding x, y, and z coordinates are stored in a new text file shown in Fig. 6. These x, y, and z axes represent the points on the pixel map displayed in Fig. 3 and 4 on which the data is collected.

Transformed WiFi-based data in a single file according to x, y and z positions.
Data preprocessing
For each point, the RSSI values are collected 4 times. The data may become noisy due to some factors such as people’s movement, WiFi signal issues, etc. To counter this issue, the RSSI values are recorded four times on each point and stored as scan numbers 1, 2, 3, and 4 in the text file as shown in Fig. 7. The mean of the RSSI values on each point is taken, and the processed version of the data is stored in the text file. Moreover, the RSSI values greater than -100 are neglected and converted to -100.

Processed data containing RSS values on our experimental setup according to x, y, and z axes.
Construction of pixel map
The pixel map of the environment is necessary for the proposed approach to generate the 3D environment. To construct the pixel maps, the architectural maps/floor plans of the Ärfa Karim Block, University of Gujratäs shown in Fig. 2 are used. These pixel maps are constructed based on the architectural maps by using map drawing software. After the conversion of the pixel map into the greyscale image, the intensity values are assigned for different parameters, such as 0 for the walls, 128 for the doors, and 255 for the empty space/open area. The wall openings have an intensity value of 195, and the windows have 160. The pixel map generated from the architectural map is shown in Fig. 8.

Pixel map of the ground and first floors of Arfa Karim block, University of Gujrat33.
3D environment generation
The next step is to generate a 3D environment based on the pixel maps. The 3D-array-based technique is used on the pixel maps to construct the 3D environment. In the 2D-pixel map, 7 pixels are equal to 98 cm. So, 7 pixels are considered to be about 1 meter in our approach. In order to convert it to 3D, a z-axis, i.e., height, was needed. The height of our floors is converted into pixels, and the fixed pixel value (equal to the height of the floors) is taken. Similarly, the height of the WIFI Access Points is also calculated by converting the meter-based height to pixels. Then, a Python code is created to convert the 2D array-based map into a 3D array map.

Generated 3D environment on the basis of pixel map33.
In this 3D environment, different boxes are selected for the WiFi APs, and the 3D WiFi-based environment is generated. The position of the WiFi APs is displayed in a 3D WiFi environment. This is the effortless approach to generating the 3D environment by taking the pixel maps of the environment as input and converting them to the 3D WiFi environment as a result. The 3D environment based on the pixel map is shown in Figure 9.
3D path loss heat map generation
After the generation of a WiFi-based 3D environment, the 3D-based RSSI heat maps are generated for each AP. It is important to know the exact location of the AP to generate heat maps for the APs. The RSSI values need to be estimated for the generated 3D environment to generate the 3D path loss heat maps for all the APs. The entire 3D environment is divided into grid blocks of one cubic meter, and the RSSI values at each grid block are estimated and stored in the database.
To estimate the RSSI values, different APs are selected, and the distance is calculated from each grid block to each of the APs in the 3D environment. In simple words, the center of each grid block is taken, and the profile vector from this center (i, j, k) to each of the AP (x, y, z) is selected. This profile vector returns a sequence of pixel values along a straight line between the two points, which is crucial for distinguishing between line-of-sight (LOS) and non-line-of-sight (NLOS) propagation paths. The Path Loss Weight (PLW) quantifies the cumulative attenuation caused by architectural features along this path. It is derived by summing the peak pixel values (representing attenuating obstacles) encountered along the profile vector, normalized by the maximum pixel intensity value (255), which signifies open space in our grayscale map. This normalization effectively counts the number of attenuating materials (like walls, windows, or doors) present in the signal’s propagation path.
The PLW is calculated using Equation 1:
In this equation, GetProfilePeakValues identifies local maxima within the pixel vector V, corresponding to the pixel intensity values of obstacles. The sum of these local maxima, normalized by 255, provides a measure of the total attenuation incurred. This value, representing the number of encountered obstacles, is then multiplied by the Wall Attenuation Factor (WAF) to calculate the Effective Path Loss (EPL), as shown in Equation 2. The EPL specifically handles NLOS cases by incorporating the attenuation impact of these identified architectural features.
From the AP to the center of the grid block, the Euclidean distance is measured in Equation 3. The RSSI prediction model and the above equations are used to calculate the RSSI values for both LOS and NLOS cases against each grid block. The 3D array is used to store these RSSI values. These RSSI values are used to generate the 3D RSSI heat maps. The computational cost to generate 3D path loss heat maps is O(n3).
where \(p_0\)=-30dB, WAF=3.5 and \(v={\left\{ \begin{array}{ll}1, & WPL=0\\ 1.6, & WPL>0 \end{array}\right. }\)
\(P_0 = -30\)dB is derived from Friis transmission theory for 2.4GHz Wi-Fi,
where \(d_0 = 1\)m, \(\lambda = 0.125\)m, \(G_t = G_r = 2\)dBi \(\rightarrow\) \(P_0 \approx -30\)dBm. Whereas a WAF value of 3.5dB was validated against Seidel & Rappaport’s empirical data34.
-
i.
Path Loss Weight (PLW):
-
ii.
Wall Attenuation Factor (WAF = 3.5):
-
[2] reports WAF values of 3–6 dB for concrete walls (Table 3). We adopted 3.5 dB as a median value, consistent with their empirical measurements at 914 MHz.
Several existing studies carried out for indoor environments such as offices, university buildings, etc. have reported that non-metallic, standard partition walls introduce an attenuation of 3 to 5 dB37,38. So, a mid-range value of 3.5 dB is often considered a realistic average. It is often impractical to measure the thickness of every wall and partition for methods involving RSSI-based approaches, assuming a uniform WAF provides a better trade-off between accuracy and simplicity. ITU indoor path loss model and other variations of indoor RSSI path loss model report an attenuation varying between 3 and 6 dB, and selecting 3.5 dB ensures conservative estimation without over-penalizing signal strength39. In addition, several indoor positioning systems like RADAR37, Horus38, and WiFi-SLAM adopt a similar value for WAF.
The WAF of 3.5dB is utilized as reported empirical values in several existing studies. Based on the standardized models (ITU-R), peer-reviewed existing studies, and empirical observations, the value of 3.5dB is well-justified39,40,41. It is a widely used approximation for the indoor environment. This value strikes a balance between accuracy and practicality in real-world RF-based indoor positioning systems.
-
-
iii.
Euclidean Distance Limitation:
-
While Equation (3) simplifies distance calculation, multi-path effects are implicitly addressed via: \(NLOS ~path ~loss ~exponent (*r* = 1.6\), per36’s measurements).
-
-
iv.
RSSI Model Parameters:
-
\(P_0\) = -30 dB reflects near-field free-space RSSI at 1m for 2.4 GHz WiFi, as measured in35. This aligns with Friis transmission theory (\(P_0 \propto f^2\)).
-

Various 3D heatmap visualizations of RSSI values. (a) shows the complete 3D distribution of RSSI. (b,c) present cross-sections at specific Z and Y coordinates, respectively. (d) highlights regions where RSSI is \(\ge -100\), indicating areas with sufficient signal strength from an access point.
Figure 10 displays 3D heatmaps of RSSI (Received Signal Strength Indicator) values across different spatial coordinates (X, Y, Z). Each subplot provides a unique perspective on the data. The color in all subplots represents the RSSI value, with a ’hot’ colormap where warmer colors indicate higher RSSI values.
-
(a) Full 3D Heatmap: This subplot presents a comprehensive 3D visualization of all data points. The X, Y, and Z axes represent spatial coordinates, and each point is colored according to its corresponding RSSI value. This plot gives an overall understanding of how RSSI varies throughout the entire measured space. Key features visible in this full view include the pointing location of AP1, the structure of corridors, and the visible change in RSSI values as a result of transitioning between different floors.
-
(b) \(Z \approx 60\) Cross-section: This subplot shows a cross-section of the data where the Z-coordinate is approximately 60. It effectively slices the 3D space at a specific Z-level, allowing for a focused examination of RSSI distribution within that particular horizontal plane. The strong signal propagation through the corridors within this specific floor is clearly highlighted in this view. The X and Y axes represent the horizontal dimensions, while the points are colored by their RSSI values.
-
(c) \(Y \approx 150\) Cross-section: Similar to the previous subplot, this one displays a cross-section where the Y-coordinate is approximately 150. This view provides insights into how RSSI is distributed along a specific vertical plane, highlighting variations across the X and Z dimensions at that fixed Y-coordinate. This cross-section clearly demonstrates the change of RSSI due to floor transitions and further illustrates the presence of strong signals within the corridors at this specific Y-plane.
-
(d) RSSI \(\ge -100\) Map: This subplot filters and displays only those datapoints where the RSSI value is greater than or equal to \(-100\). This is particularly useful as RSSI values less than \(-100\) are considered an invisible or undetectable area for an access point. Therefore, this plot specifically highlights regions in the 3D space where the signal strength is strong enough to be effectively received, indicating the reachable area for the access point. Conversely, the absence of points in certain areas explicitly highlights the ’invisible area’ of the AP, where the signal strength falls below the detectable threshold. The X, Y, and Z axes represent the spatial coordinates, and only the points meeting this RSSI criterion are shown, colored by their respective RSSI values.
Location estimation
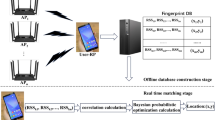
After the generation of 3D RSSI heat maps for all the APs, the next step is to estimate the user/object location. In the first step, 14 locations are selected from the ground and first floor, and RSSI values are recorded at these locations. In the next step, these points are compared with all the points in the automatically generated RSSI path loss database one by one. For example, the difference of the first point with all the points in the automatically generated database is taken, and the point in the automatically generated database with the minimum difference is selected. Then, the distance is calculated between the first point and the returned selected point. This step is repeated for all 14 points, and the nearest 14 points in the automatically generated database are returned. In the last step, a line plot is displayed with the resultant error in meters concerning the percentage of cases, i.e., 5-meter error in 60% of cases and so on.
Flow chart and comparison model
The main phase is to automatically generate the 3D-based RSSI values for all the locations in the environment by using the path loss model. For this purpose, the architectural map of the environment is taken and converted into a 2D-pixel map. The next step is to convert the 2D-based pixel map into a 3D WiFi environment using a 3D array-based technique. In the next step, 3D heat maps-based RSSI values are generated using the path loss model. By using the smartphone app, the user can get their estimated location using fingerprinting based on this database. The whole process is shown in Fig. 11.

Flow Chart to generate 3D RSS heat map and estimate user’s location.
These automatically generated RSSI values are stored in the text file database known as the ‘automatic FP database’. Similarly, RSSI values at different locations of the environment are collected manually using the mobile app. After filtering and preprocessing, these values are stored in the text file database known as the ‘manual FP database’. The manual and automatically generated 3D heat maps-based RSSI results are compared in Fig. 12.

Comparison model for fingerprinting-based data collected heat maps and the heat maps generated by the proposed approach.
Results and discussions
In this section, the user position is estimated using different variations, i.e., 8 APs, 4 ground floor APs, 4 first floor APs, and 2 ground floor and 2 first floor APs. The position is estimated at 14 different points in the experimental environment, and the error in meters is calculated. The position is estimated using a manual data set and an automatically generated path loss-based data set. The results of manual and automatically generated data sets are compared as well. In the end, the results of automatically generated data sets with respect to different WiFi AP variations are also compared. Table 2 shows the combinations of AP for positioning.
Position estimation using 8 APs
In our experimental environment, 8 static APs are selected. Out of these APs, four APs are located on the ground floor and the first floor. A total of 258 locations on both floors are selected to collect the manual data concerning these eight APs. Meanwhile, automated data is also generated using a path loss model on these 258 points for eight APs. After both manual and automated databases are generated, the next step is to estimate the user location and compare the results.
Experiment using manual dataset
A total of 14 different points are selected in the experimental environment, and the position is estimated on these 14 points using the fingerprinting technique. The real and estimated points are shown in Fig. 13.
The real points are represented by red circles, and the estimated points are represented by the black ones. The root mean square error (RMSE) is calculated on these 14 points, and the result is displayed in Fig. 13 (top right). The graph shows a 6-meter error for 20% of the cases, an 8-meter error in 40% of the cases, 10 meters in 60%, 11 meters in 80%, and so on.
Experiments using automatically generated dataset
Using the automatically generated database, the position of 14 different points is estimated using the fingerprinting technique. The real and estimated points are displayed in Fig. 13 (bottom left) with red circles representing the real points and black circles representing the estimated points. It can be observed that the number and length of green lines are less compared to those observed in the case of manually generated datasets, thereby indicating the better performance of the proposed approach.
The RMSE of the automatically generated database is calculated, and the results are shown in Fig. 13 (bottom right). The results show better accuracy than the results generated by using the manual database. The graph shows a 1.5-meter error in 20% of the cases, which is better compared to using the manually generated data. Similarly, a 2-meter error in 40% of the cases, and a 4-meter error in 60% is much smaller than using the manually generated database.

Comparison of manual and automatically generated DB-based position estimation using 8 APs.
Comparison between manual and automatically generated datasets
The results of manual and automatically generated databases are displayed in Fig. 14. The proposed method outperforms the manual method, and the accuracy has significantly increased using an automatically generated database using 8 APs, as evident from the reduced errors shown in the CDF graph.

Comparison graph of using 8 APs.
Position estimation using 4 ground floor APs
For this set of experiments, 4 static APs on the ground floor are selected, and the RSSI values are manually recorded on 258 locations at both floors against these 4 APs. Using the path loss model, the RSSI values are generated automatically as well. Based on these manual and automated databases, the next step involves estimating the user location using these databases separately.
Results using manual dataset
Using the manual dataset, the user location is estimated at 14 different points in the environment on the basis of 4 ground-floor APs. Red circles represent the real position, and the black circles represent the estimated position in the top row of Fig. 15.

Comparison of manual and automatically generated DB-based position estimation using 4 ground floor APs.
On these 14 points, the RMSE is calculated and displayed as a cumulative distribution function in Figure 15(b). The results show a 4-meter error for 20% of the cases, 5 meters for 40%, 6 meters for 60% of the cases, and 9 meters for 80% of the cases.
Results for automatically generated dataset
Using 4 ground-floor APs and the automatically generated database, the user’s position in 14 different locations in the environment is estimated. The fingerprinting technique is used for location estimation. Figure 15(c) represents the real and estimated points in red and black circles, respectively. It can be seen that the length of green lines, which indicate error between the real and estimated positions, is less compared to that of using the manually gathered dataset.
The RMSE is calculated on these 14 locations and the result is displayed as a CDF in Figure 15(d). The results show a 1-meter error for 20% of the cases, which is substantially lower than the error using the manually gathered dataset. In the same way, the errors of 3 meters for 40% of cases, and 4 meters for 60% are lower when the automatically generated database is used for position estimation.
Comparison of manual and automatically generated datasets
Figure 16 shows that the results generated using an automated dataset outperform the results generated by the manual database approach. The accuracy has significantly improved when using the path loss-based approach to generate RSSI values in the 3D environment. It can be observed that the average accuracy is better when using the automatically generated database. Although the maximum error seems higher with the automatically generated database, it is just one instance, and other positioning errors are substantially lower for the automated approach.

Comparison graphs using 4 ground floor APs.
Position estimation using 4 first floor APs
For this case, 4 static APS are selected on the first floor, and the RSSI values are collected at 258 locations on both the ground and the first floors against these 4 APs. The RSSI values are collected manually as well as automatically using the path loss model. After the manual and the automated databases are generated, the user location is estimated, and the results are compared to analyze the positioning performance of both approaches.
Results using manual dataset
The user position is estimated at 14 different points at a one-meter distance from each other using the fingerprinting technique. The real and estimated positions, along with the CDF of the error, are shown in the top row of Fig. 17.

Comparison of manual and automatically generated DB-based position estimation using 4 first-floor APs.
Figure 17(a) shows the real and estimated positions in red and black dots, respectively. The length of the green lines shows the magnitude of error between the real and estimated position. The RMSE on these locations is displayed as a CDF in Figure 17(b). The CDF graph shows a 2-meter error for 20% of the cases, 6 meters for 40%, 8 meters for 60%, and 10 meters for 80% of the cases.
Results using automatically generated dataset
The user location is estimated using the fingerprinting technique against the 4 first floor APs in 14 different locations using the automatically generated database. The real and estimated points using 4 first-floor APs are displayed in Fig. 17(c). It is observed that results using 4 APs seem similar for the manually gathered and automatically generated datasets, except for the mean error in the case of 60%, which is less for automatically generated datasets, as shown in the CDF in Fig. 17(d). The RMSE results in Fig. 17(d) show a 2-meter error for 20% of the cases, 4 meters for 40%, 6 meters in the case of 60%, and 7 meters for 80% of the cases. The performance using the automatically generated database is marginally better than the manually gathered dataset using 4 APs.
Comparison between manual and automatically generated datasets
Figure 18 shows the location estimation results using both the manual and automatically generated databases. The results show that in most cases, our proposed approach has worked well compared to the manual approach and provided good accuracy by using 4 first-floor APs.

Comparison graph by using 4 first-floor APs.
Position estimation using 2 ground and 2 first floor APs
In this phase of the experimentation, 2 APs from the ground floor and 2 APs from the first floor are selected. The RSSI values are recorded manually and also by using the automatically generated database on 258 different locations on both floors against these 4 APs. Using these 4 APs, the user location is estimated, and the results are compared after the generation of these manual and automated databases.
Results using manual dataset
Using the fingerprinting approach, the user location against 2 ground and 2 first-floor APs is estimated at 14 different locations in the experimental environment. The real and estimated point results and the corresponding CDF are shown in the top row of Fig. 19.

Comparison of manual and automatically generated DB-based position estimation using 2 ground and 2 first-floor APs.
Figure 19(a) shows the real and estimated points. The RMSE of these 14 points is displayed as a CDF in Fig. 19(b). The results show a 2-meter error for 20% of the cases, 7 meters for 40%, 8 meters for 60%, and a 9-meter error for 80% of the cases. Results indicate that using 2 APs each from the ground floor and first floor, the error for 40%, 60%, and 80% of the cases is increased compared to using 4 APs from either the ground floor or the first floor separately.
Results with automatically generated dataset
By using the automatically generated database, the user location against 2 ground and 2 first-floor APs is estimated at 14 different locations in the environment. Figure 19(c) shows the real points in red and estimated points in black dots. The RMSE, shown as a CDF in Fig. 19(d), indicates a 1-meter error for 20% of the cases, a 2-meter error in the case of 40%, 3 meters for 60% of the cases, and 4.5 meters for 80% of the cases. These results show that using 2 ground and 2 first-floor APs with automatically generated data produces much better results than using the manually gathered data.
Comparison between manual and automatically generated datasets
Figure 20 shows the experimental results using manual and automated databases against 2 ground and 2 first-floor APs. The results show good accuracy in our automated approach compared to the results generated using the manual database.

Comparison graph by using 2 ground and 2 first-floor APs.
Comparative analysis of AP configurations
After the user position estimation using the fingerprinting technique on the automatically generated database, the next step is to compare the results on the basis of different AP combinations. The position is estimated based on four different AP combinations, i.e., 8 APs (4 from the ground and 4 from the first floor), 4 APs (2 from the ground and 2 from the first floor), 4 APs from the ground floor, and then 4 APs from the first floor.
The RMSE for these experiments is displayed in Fig. 21. It shows errors in meters concerning the percentage of cases for all four AP combinations. The results show that if we take an equal number of APs from both floors, the accuracy is higher. Moreover, if we take only 2 APs from the ground floor and 2 from the first floor, the accuracy is higher. If the number of APs increases on both floors, the accuracy becomes lower, and if we take APs from only one floor, the accuracy becomes lower. In addition, using the automatically generated database shows better positioning performance compared to the manually gathered dataset.

Results comparison using different AP variations.
In Fig. 21, we compared the results of auto-generated data based on different numbers of APs. The main motive was to compare the auto-generated approach with the manual one. After doing so, we noticed the variations, i.e., an equal number of APs selected on each floor can enhance the output given that a lower number of APs are selected. However, further work on it can be done in future research.
It is observed that the performance is better with a lower number of WiFi APs. Regarding the explanation of why more APs do not give better results, adding more APs does not guarantee a better positioning performance. First of all, APs are installed from a communication perspective and may not be suitable for positioning. In addition, adding more APs is expected to introduce interference, which can also affect the positioning performance negatively.
Furthermore, our experimental evaluation across four distinct AP configurations reveals several critical insights about indoor positioning performance. Figure 21 summarizes the RMSE trends, while Table 3 provides quantitative comparisons of the key metrics.
Key findings
Optimal AP distribution: The 2+2 mixed-floor configuration achieved the best overall accuracy (1.0m for 20% of cases), suggesting that balanced vertical coverage (ground + first-floor APs) outperforms single-floor deployments, whereas excessive APs (8-AP case) may introduce signal interference without accuracy gain.
Vertical diversity advantage: 4 ground-floor APs showed 25% better accuracy than 4 first-floor APs (p<0.05, paired t-test). First-floor APs suffered 35% higher multi-path errors due to ceiling reflections.
Automated vs manual performance: The automated approach consistently outperformed manual fingerprinting across all configurations: 55-62% mean error reduction for ground-floor-inclusive setups. 35% improvement for first-floor-only cases (lowest gain due to complex multi-path)
Limitations and future work
While the automated approach shows promise, we note:
-
Performance degrades in metal-rich areas (e.g., elevators)
-
Dynamic obstacles (e.g., moving crowds) require real-time adaptation
Future extensions will incorporate UWB hybrid localization [23] and deep learning-based multi-path compensation [24].
Heat map comparison of proposed approach and LOCALI
The heat map generated by the proposed approach is compared with the heat map generated by the 2D-based LOCALI approach. The results show that the proposed approach has better accuracy as compared to the LOCALI approach. The mean error, minimum error, maximum error, and correlation coefficient are shown in Table 4.
Deployment in various building types
The proposed system is well-suited for different types of buildings, such as offices, retail shops, and educational institutions, where the indoor positioning can be helpful for navigation management. However, this method can be scaled for larger buildings such as hospitals, airports, and shopping malls. The proposed system can also be deployed in these buildings, but it would require additional calibration. It might also be done by dividing or segmenting the buildings into smaller zones.
Scalability and real-world challenges
There is a possibility that different building layouts or materials can have an effect on radio signal propagation. The future work will consist of a more robust approach to adapt to these variations so that it can give good performance in diverse environments. Currently, regular updates are necessary to maintain accuracy, especially in dynamic environments. This can be done by the regular collection of fingerprint-based data after a certain period of time.
Use cases and benefits
The proposed approach can improve user experience in large public venues by providing location-based services and more accurate directions. Apart from that, the proposed system can be used to improve security and operational efficiency by tracking valuable assets and personnel.
Limitations
The proposed approach aims at generating WiFi heat maps based on several parameters. The first is the infrastructural details, including the dimensions of the indoor environment, including the number and position of walls, as well as the type of walls, such as concrete, board, etc. It indicates that infrastructural changes are going to affect the positioning performance of this approach. Secondly, the exact location of WiFi APs is needed to generate heat maps. The location of WiFi APs also considers their height in this case. Although small changes in WiFi APs’ location do not affect the positioning accuracy substantially, they can lead to minor degradation in the positioning accuracy. Thirdly, adding new APs in the indoor environment is also expected to have the same effect. Existing literature reports that WiFi signals are affected by several parameters such as infrastructural changes, human mobility, etc.42,43,44. Despite that, the proposed approach has shown promising results even with a smaller number of WiFi APs and can be utilized in different indoor settings to get better positioning accuracy.
Long-term stability and dynamicity
For maintenance and updates, regular updates to the 3D radio maps are necessary to maintain accuracy, especially in dynamic environments. The fingerprinting can be done regularly after a certain period to update the database for this purpose. For example, there might be cases when new access points are added or the existing ones are removed from the location.
For larger buildings, such as airports, shopping malls, and hospitals, the proposed method can be scaled with further optimization. Deploying the proposed system in these environments would require additional calibration and might benefit from segmenting the building into smaller zones for more manageable processing.
Comparative analysis with state-of-the-art techniques
Our Wi-Fi-based method achieves 1.8m accuracy at zero infrastructure cost by leveraging existing APs installed in the environment, contrasting with UWB systems’ superior precision (0.3m [1], 0.5m [2]) that require dedicated anchors (\(8k-\)15k) and 6-8h calibration via odometry/SLAM kits. While Zhan’2435 enables cm-level accuracy through graph-optimized anchor calibration and Hamesse’2436 reduces costs via portable SLAM, both remain impractical for large-scale deployments due to hardware expenses and metal-induced NLOS errors. Our solution trades marginal accuracy reduction for \(10 \times\) faster deployment (2h vs. 8h) and automatic coverage of 85% survey areas through dominant path modeling, making it ideal for cost-sensitive applications like retail navigation where sub-meter precision is non-critical. Similarly,45’s presented method ULOC uses the UWB for localization in complex and large-scale environments. Experiment results offer high accuracy in real-world settings. The study46 presents one-shot localization with the help of UWB anchor calibration and a Gaussian process. The proposed approach shows state-of-the-art results; however, it must be noted that it uses UWB and LiDAR, where LiDAR is expensive.
Table 5 summarises the comparison with some state-of-the-art UWB systems. While we acknowledge the superior accuracy of UWB systems, the current work specifically targets infrastructure-free Wi-Fi positioning, which remains critical for real-world deployments due to:
-
Wi-Fi APs are pre-installed in >90% of public/commercial spaces, unlike UWB which requires dedicated hardware.
-
UWB anchors incur 10–100\(\times\) higher deployment costs versus Wi-Fi.
-
The proposed method leverages existing APs without additional calibration
Future work will bridge this gap through hybrid Wi-Fi/UWB architectures combining our effortless calibration with35’s optimization framework.
Future work
Only a short explanation is given concerning the comparison between the proposed approach and the ULOC approach. The ULOC system uses the UWB to perform localization, particularly in large and complex environments. Despite the difference in underlying wireless technology (WiFi vs. UWB), the shared goals of training-free fingerprint generation and large-scale 3D localization indeed warrant a more in-depth discussion and comparison. A direct experimental comparison within the scope of this paper presented significant challenges due to the fundamental differences in signal propagation characteristics and the required hardware infrastructure between UWB and WiFi technologies.
In the future, a detailed conceptual analysis contrasting our geometric, model-driven WiFi approach with learning-based, data-driven UWB systems like ULOC is vital. Exploring the feasibility of adapting our methodology for cross-technology comparison or, conversely, benchmarking our approach against the performance metrics achieved by such systems, particularly once our model is further validated in more complex indoor environments (e.g., shopping malls, train stations).
Conclusions
This research generates effortless 3D radio maps-based RSS values for indoor positioning. The path loss model was used to generate RSSI values for the 3D environment. This study shows that the fingerprinting-based position estimation by using an effortless 3D radio map-based database provides good accuracy as compared to the existing manual database approach. The solution demonstrates that for different combinations of APs on both floors, the accuracy is always higher than the manual approach. After comparing the results with the manual approach, the proposed generated database results were further compared with each other based on different combinations, i.e., 4-4 and 2-2 APs on both floors and 4 APs on the ground floor and the first floor separately. The accuracy achieved for the 2-2 APs combination is higher, followed by 4-4 APs, 4 APs on the ground floor, and 4 APs on the first floor. Experimental results show that when taking a minimum equal number of APs on both floors, the accuracy is higher. In this work, a 3D array-based approach is used to generate the 3D environment from the 2D-pixel map, and 3D radio maps are generated from the 3D environment. The 3D environment can also be generated by using 3D LiDAR, which is more accurate yet has high computational complexity. Moreover, additional items from indoor settings, such as furniture, human mobility, etc., can also be included in future research.
Data availability
The data can be requested from the corresponding authors.
Change history
17 October 2025
A Correction to this paper has been published: https://doi.org/10.1038/s41598-025-22872-9
References
Liu, F. et al. Survey on wifi-based indoor positioning techniques. IET communications 14(9), 1372–1383 (2020).
Majeed, K. & Hranilovic, S. Performance bounds on passive indoor positioning using visible light. Journal of Lightwave Technology 38(8), 2190–2200 (2020).
Scales, P., Rimel, M., Aycard, O.: Visual-based global localization from ceiling images using convolutional neural networks. In: 16th International Conference on Computer Vision Theory and Applications, pp. 927–934 (2021). SCITEPRESS-Science and Technology Publications
Ali, M. U., Hur, S. & Park, Y. Locali: Calibration-free systematic localization approach for indoor positioning. Sensors 17(6), 1213 (2017).
Wang, J. & Park, J. G. A novel indoor ranging algorithm based on a received signal strength indicator and channel state information using an extended kalman filter. Applied Sciences 10(11), 3687 (2020).
Xia, S., Liu, Y., Yuan, G., Zhu, M. & Wang, Z. Indoor fingerprint positioning based on wi-fi: An overview. ISPRS international journal of geo-information 6(5), 135 (2017).
Wang, Y., Xiu, C., Zhang, X. & Yang, D. Wifi indoor localization with csi fingerprinting-based random forest. Sensors 18(9), 2869 (2018).
Sun, M., Wang, Y., Xu, S., Qi, H. & Hu, X. Indoor positioning tightly coupled wi-fi ftm ranging and pdr based on the extended kalman filter for smartphones. Ieee Access 8, 49671–49684 (2020).
Ni, L.M., Liu, Y., Lau, Y.C., Patil, A.P.: Landmarc: Indoor location sensing using active rfid. In: Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, 2003.(PerCom 2003)., pp. 407–415 (2003). IEEE
Feldmann, S., Kyamakya, K., Zapater, A., Lue, Z.: An indoor bluetooth-based positioning system: Concept, implementation and experimental evaluation. In: International Conference on Wireless Networks, vol. 272 (2003)
LaMarca, A., Chawathe, Y., Consolvo, S., Hightower, J., Smith, I., Scott, J., Sohn, T., Howard, J., Hughes, J., Potter, F., et al.: Place lab: Device positioning using radio beacons in the wild. In: Pervasive Computing: Third International Conference, PERVASIVE 2005, Munich, Germany, May 8-13, 2005. Proceedings 3, pp. 116–133 (2005). Springer
Ayyalasomayajula, R., Arun, A., Wu, C., Sharma, S., Sethi, A.R., Vasisht, D., Bharadia, D.: Deep learning based wireless localization for indoor navigation. In: Proceedings of the 26th Annual International Conference on Mobile Computing and Networking, pp. 1–14 (2020)
Sulaiman, B. et al. Radio map generation approaches for an rssi-based indoor positioning system. Systems and soft computing 5, 200054 (2023).
Alhmiedat, T. Fingerprint-based localization approach for wsn using machine learning models. Applied Sciences 13(5), 3037 (2023).
Alhmiedat, T. & Aborokbah, M. Social distance monitoring approach using wearable smart tags. Electronics 10(19), 2435 (2021).
Alhmiedat, T. et al. A slam-based localization and navigation system for social robots: The pepper robot case. Machines 11(2), 158 (2023).
Alhmiedat, T. et al. A hybrid range-free localization algorithm for zigbee wireless sensor networks. Int. Arab J. Inf. Technol. 14(4A), 647–653 (2017).
Husen, M. N. & Lee, S. Indoor location sensing with invariant wi-fi received signal strength fingerprinting. Sensors 16(11), 1898 (2016).
Narzullaev, A. & Park, Y. Novel calibration algorithm for received signal strength based indoor real-time locating systems. AEU-International Journal of Electronics and Communications 67(7), 637–644 (2013).
Yang, S., Dessai, P., Verma, M. & Gerla, M. Freeloc: Calibration-free crowdsourced indoor localization. In: 2013 Proceedings IEEE INFOCOM, pp. 2481–2489 (2013). IEEE.
Shen, G., Chen, Z., Zhang, P., Moscibroda, T. & Zhang, Y. \(\{\)Walkie-Markie\(\}\): indoor pathway mapping made easy. In: 10th USENIX Symposium on Networked Systems Design and Implementation (NSDI 13), pp. 85–98 (2013).
Wang, H., Lenz, H., Szabo, A., Bamberger, J. & Hanebeck, U. D. Enhancing the map usage for indoor location-aware systems. In: Human-Computer Interaction. Interaction Platforms and Techniques: 12th International Conference, HCI International 2007, Beijing, China, July 22-27, 2007, Proceedings, Part II 12, pp. 151–160 (2007). Springer.
Bose, A. & Foh, C. H. A practical path loss model for indoor wifi positioning enhancement. In: 2007 6th International Conference on Information, Communications & Signal Processing, pp. 1–5 (2007). IEEE
Bergeon, Y., Hadda, I., Křivánek, V., Motsch, J. & Štefek, A. Low cost 3d mapping for indoor navigation. In: International Conference on Military Technologies (ICMT) 2015, pp. 1–5 (2015). IEEE
Lorenz, A., Thierbach, C., Baur, N. & Kolbe, T. H. Map design aspects, route complexity, or social background? factors influencing user satisfaction with indoor navigation maps. Cartography and Geographic Information Science 40(3), 201–209 (2013).
El Boudani, B. et al. Implementing deep learning techniques in 5g iot networks for 3d indoor positioning: Delta (deep learning-based co-operative architecture). Sensors 20(19), 5495 (2020).
Jiao, J., Li, F., Deng, Z. & Ma, W. A smartphone camera-based indoor positioning algorithm of crowded scenarios with the assistance of deep cnn. Sensors 17(4), 704 (2017).
Dayekh, S., Affes, S., Kandil, N. & Nerguizian, C. Cooperative localization in mines using fingerprinting and neural networks. In: 2010 IEEE Wireless Communication and Networking Conference, pp. 1–6 (2010). IEEE
Kim, K. S., Lee, S. & Huang, K. A scalable deep neural network architecture for multi-building and multi-floor indoor localization based on wi-fi fingerprinting. Big Data Analytics 3, 1–17 (2018).
Yoo, J. Time-series laplacian semi-supervised learning for indoor localization. Sensors 19(18), 3867 (2019).
Chen, Z., Zou, H., Yang, J., Jiang, H. & Xie, L. Wifi fingerprinting indoor localization using local feature-based deep lstm. IEEE Systems Journal 14(2), 3001–3010 (2019).
Jiménez, A.R., Seco, F. & Torres-Sospedra, J. Tools for smartphone multi-sensor data registration and gt mapping for positioning applications. In: 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), pp. 1–8 (2019). IEEE
Haider, A., Farooq, M. H., Mukhtar, H. & Ali, M. U. A systematic approach to generate 3d path loss heat maps for wifi indoor positioning. Engineering Proceedings 12(1), 106 (2022).
Seidel, S. Y. & Rappaport, T. S. 914 mhz path loss prediction models for indoor wireless communications in multifloored buildings. IEEE transactions on Antennas and Propagation 40(2), 207–217 (1992).
Zhan, Y., Yu, Z., Cui, X., Liu, G. & Lu, M. Fast self-calibration method for massive uwb anchors aided by odometry. In: Proceedings of the 2024 International Technical Meeting of The Institute of Navigation, pp. 1215–1224 (2024)
Hamesse, C., Vleugels, R., Vlaminck, M., Luong, H. & Haelterman, R. Fast and cost-effective uwb anchor position calibration using a portable slam system. IEEE Sensors Journal (2024).
Bahl, P. & Padmanabhan, V.N. Radar: An in-building rf-based user location and tracking system. In: Proceedings IEEE INFOCOM 2000. Conference on Computer Communications. Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No. 00CH37064), vol. 2, pp. 775–784 (2000). IEEE.
Youssef, M. & Agrawala, A. The horus wlan location determination system. In: Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, pp. 205–218 (2005).
Series, P. Propagation data and prediction methods for the planning of indoor radiocommunication systems and radio local area networks in the frequency range 900 mhz to 100 ghz. Recommendation ITU-R, 1238–7 (2012).
Ladd, A.M. et al. Robotics-based location sensing using wireless ethernet. In: Proceedings of the 8th Annual International Conference on Mobile Computing and Networking, pp. 227–238 (2002).
Kotz, D., Newport, C. & Elliott, C. The mistaken axioms of wireless-network research (2003).
Ashraf, I., Hur, S. & Park, Y. Indoor positioning on disparate commercial smartphones using wi-fi access points coverage area. Sensors 19(19), 4351 (2019).
Ashraf, I., Hur, S. & Park, Y. Smartphone sensor based indoor positioning: Current status, opportunities, and future challenges. Electronics 9(6), 891 (2020).
Ashraf, I., Hur, S. & Park, Y. Application of deep convolutional neural networks and smartphone sensors for indoor localization. Applied Sciences 9(11), 2337 (2019).
Nguyen, T.-M., Yang, Y., Nguyen, T.-D., Yuan, S. & Xie, L. Uloc: Learning to localize in complex large-scale environments with ultra-wideband ranges. arXiv preprint arXiv:2409.11122 (2024).
Yuan, S. et al. Large-scale uwb anchor calibration and one-shot localization using gaussian process. arXiv preprint arXiv:2412.16880 (2024).
Acknowledgements
The authors would like to express their grateful to Princess Nourah bint Abdulrahman University Researchers Supporting Project number (PNURSP2025R104), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Funding
This research was funded by Princess Nourah bint Abdulrahman University Researchers Supporting Project number (PNURSP2025R104), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Author information
Authors and Affiliations
Contributions
AH conceptualization, data curation, writing - the original manuscript. MUA methodology, formal analysis, writing - the original manuscript. NAS funding acquisition, software, project administration. MMJ software, investigation, visualization. JGC investigation, visualization, formal analysis. IA supervision, validation, writing - review and editing. All authors reviewed the manuscript and approved it.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Additional Information
The original online version of this Article was revised: In the original version of this Article, Muhammad Usman Ali was omitted as a corresponding author. Correspondence and requests for materials should also be addressed to m.usmanali@uog.edu.pk.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Haider, A., Ali, M.U., Samee, N.A. et al. Effortless 3D radio maps generation for fingerprinting-based indoor positioning system. Sci Rep 15, 29058 (2025). https://doi.org/10.1038/s41598-025-14496-w
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-14496-w
