
Abstract
This study presents a wearable robot equipped with a novel anchoring structure designed to improve both force transmission efficiency and user comfort. While soft wearable robots are inherently more comfortable than rigid exoskeletons, they often suffer from significant force loss and increased anchoring pressure when higher assistive forces are applied. To address this trade-off, a chain-linking anchoring structure with anisotropic stiffness was developed and integrated into the wearable system. The structure is designed to exhibit high stiffness in regions critical for force transmission, minimizing deformation, while maintaining low stiffness in areas that require gentle deformation for wearer comfort. Experimental validation of the wearable robot demonstrated a 34.2% improvement in force transmission efficiency compared to conventional anchoring methods, without compromising comfort. These results highlight the effectiveness of the proposed robot in delivering strong assistance while remaining comfortable, offering a practical solution for the advancement of wearable assistive technologies.
Similar content being viewed by others


Introduction
Soft wearable robots are developed to enhance human capabilities while ensuring comfortable wearability1,2,3,4. Due to these advantages, they have been widely studied for reducing metabolic rates5,6,7,8,9, improving sprint performance10, and decreasing muscle efforts in industrial tasks11,12,13,14,15. The development of wearable robots holds vast potential not only in rehabilitation, healthcare, and industrial applications but also in everyday tasks such as household assistance.
However, soft wearable robots face critical challenges in anchoring mechanisms, particularly in balancing force transmission efficiency and user comfort. A major issue is the substantial loss of force during transmission from actuators to the human body. Soft materials commonly used in anchoring structures exhibit high compliance, leading to deformation and delays in force delivery. To compensate for this loss, increasing anchoring pressure is often required, which can result in discomfort or even pain for the wearer16. This inherent trade-off between force transmission efficiency and comfort remains a significant challenge in developing wearable robots that provide both effective assistance and comfort.
Various studies have aimed to improve force transmission in soft wearable robots while maintaining comfort, but each has limitations. Research on selecting an optimal range of applied pressure between high pressure for greater assistive forces and low pressure for comfort17 has been carried out, yet this approach does not fully address the inherent trade-off. Another approach involves applying high pressure only during force transmission to enhance transmission efficiency18; however, it still causes discomfort while the force is being transmitted. A method that processes anchoring structures to conform tightly to the skin, enabling force distribution while ensuring high assistive capability19, offers both effective force transmission and comfortable wearability. Nevertheless, this approach presents limitations for commercialization due to its reliance on personalized manufacturing. Additional efforts have been made to review and systematize physical interfaces and actuation methods in soft wearable robots20, revealing that the majority still face challenges in anchoring comfort and load transfer stability. Piao et al.21 proposed a comfort-focused suit with flexible artificial muscles, but force transmission efficiency was limited by uniform stiffness distribution. Ferroni et al.22 developed a soft pneumatic exosuit for the forearm, demonstrating lightweight comfort but relying on pneumatic chambers rather than structural anisotropy for anchoring. Despite these efforts, the trade-off between force transmission efficiency and user comfort remains unresolved.
To address these challenges, this study proposes a chain-linking anchoring structures designed to enhance force transmission efficiency while maintaining user comfort, aiming to resolve the trade-off inherent in soft wearable robots (Fig. 1). Through analysis of conventional anchoring mechanisms, we identified insufficient shear stiffness as the primary factor limiting force transmission efficiency. Additionally, achieving both effective force transmission and comfortable wearability requires low stiffness in the circumferential direction. To address these requirements, we developed a chain-linking structure with anisotropic stiffness and applied it to the robot.

A wearable robot with a chain-linking anchoring structure that provides anisotropic stiffness, enabling efficient force transmission while preserving comfortable wearability.
The wearable robot with the proposed anchoring structure was designed to improve force transmission efficiency and user comfort. Mathematical modeling and experiments analyzed the effects of design parameters, leading to a system optimized for high shear stiffness and even force distribution. The structure was integrated into a wearable robot and evaluated through tests on both a dummy and human participants. Finally, tasks such as lifting, walking, and running were performed to assess force transmission and comfort.
The findings of this study offer a potential solution to the longstanding challenge in soft wearable robots: achieving both effective assistance and comfortable wearability. While this study focuses on a lower-limb wearable robot, the chain-linking anchoring structure can also be applied to the upper limbs, enabling its expansion into various fields such as rehabilitation and household assistance.
Results
Human subject experiments
Integration of the proposed chain-linking anchoring structure into a wearable robot significantly enhanced force transmission efficiency while maintaining user comfort during human subject experiments. As shown in Fig. 2a, a wearable robot was developed to evaluate the performance of different anchoring systems in a realistic setting. Eight healthy adult males wore the robot equipped with either the conventional or the proposed anchoring structure, and the transmitted force was measured using a load cell under identical actuator conditions. Participant anthropometrics were recorded: mean height 172 cm (range 166–178) and mean weight 73.3 kg (range 63–88).
Each participant donned the wearable robot in the posture shown in Fig. 2a. The robot was actuated using the same pneumatic artificial muscle and identical input commands, ensuring consistent actuator output. The force transmitted through each anchoring system was measured via a load cell embedded in the structure. As shown in Fig. 2b, the proposed anchoring structure achieved a mean transmitted force of 192.0 N, compared to 143.1 N for the conventional system, corresponding to a 34.2% improvement. A paired t-test confirmed that the difference was statistically significant (\(p < 0.01\)), indicating that the chain-linking structure effectively reduces force loss and improves assistive performance.

(a) Wearable robot used for human subject experiments to evaluate anchoring performance. The pneumatic artificial muscle spans from the proximal thigh cuff to the distal chain-linking frame; contraction along its line of action pulls the frame in the actuator direction, converting axial tension into circumferential tightening while preserving transverse compliance. (b) Comparison of transmitted force under identical actuator input; the proposed anchoring structure delivers 34.2% more force than the conventional system. (c) Additional tasks performed for qualitative evaluation. (d) Survey results showing that the proposed structure provides higher perceived assistance while maintaining comparable comfort. In (d), scores use a 1–5 scale (1 = least comfortable/effective; 5 = most comfortable/effective).
To evaluate the effect of anchoring structure on comfort, participants performed walking, running, and load-carrying tasks (Fig. 2c) while wearing the robot equipped with each anchoring structure in an unassisted state. Survey scores rated on a 1–5 scale (Fig. 2d) showed comparable or slightly improved comfort levels for the proposed system (mean score: 2.67) compared to the conventional system (2.53). Notably, users rated the perceived force transmission significantly higher with the proposed system (4.17 vs. 2.83), suggesting that enhanced assistive performance was achieved without compromising comfort, consistent with the quantitative results.
These results demonstrate that the chain-linking anchoring structure enables more effective assistance without compromising wearability, validating its applicability for practical wearable robotic systems.
Wearing-stiffness comparison on human-shaped dummy
The proposed chain-linking anchoring structure demonstrated significantly higher system stiffness compared to the conventional soft anchoring system. As shown in Fig. 3, the average stiffness of the system using the proposed anchoring structure reached 1.61 N/mm, representing a 16.3% increase over the conventional design (1.38 N/mm). This result corresponds to an approximately 14.3% reduction in displacement under equivalent loading conditions.

Comparison of system stiffness measured using a human-shaped dummy. The proposed chain-linking anchoring structure demonstrates approximately 16.3% higher stiffness compared to the conventional soft anchoring system.
The evaluation was conducted using a tendon-driven wearable robot mounted on a human-shaped dummy (Fig. 3a), eliminating variations caused by human muscle activation or anatomical differences. A shear force was applied at a controlled rate of 120 mm/min through a force gauge, and stiffness was derived from the slope of the force-displacement curve. Each configuration was tested five times to ensure repeatability.
This reduction in displacement is particularly beneficial for pneumatic artificial muscles, which are highly sensitive to length changes. The increased system stiffness confirms the improved force transmission efficiency of the chain-linking anchoring structure, validating its effectiveness in addressing limitations associated with compliant soft anchoring systems.
Force distribution analysis on dummy
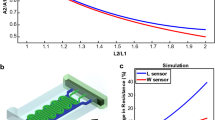
To evaluate how different anchoring structures affect the spatial distribution of contact forces, pressure at the human–device interface was measured using force-sensitive resistors (FSR) sensors embedded in a sleeve worn by a human-shaped dummy (Fig. 4a). As shown in Fig. 4b, the FSR sensors were distributed circumferentially around the thigh, covering the front, side, and rear regions. We compared three anchoring conditions: a conventional soft anchoring system, the proposed chain-linking anchoring structure, and a rigid anchoring configuration. The rigid condition was created by removing the chain-linking segments from the proposed design, resulting in a single-piece and non-compliant frame. Although the material and attachment method (nylon strap and buckle) remained the same, the rigid anchoring structure had a narrower width and lacked articulation, thereby reducing its conformity to curved surfaces.

(a) Sensor-integrated sleeve used to measure contact forces on a human-shaped dummy. (b) Arrangement of FSR sensors circumferentially around the thigh. (c) Comparison of Force Imbalance Index for each anchoring structure under identical actuator input. The index is defined as the standard deviation of the forces measured across all sensors; lower values indicate more uniform pressure distribution. FII serves as an objective proxy for pressure uniformity and, by extension, comfort at the interface. The rigid system showed significantly greater imbalance than the soft system (\(p < 0.05\)), whereas the proposed system did not differ significantly from the soft system (\(p> 0.1\)).
All anchoring systems were subjected to the same actuator input to ensure that the applied force was consistent across conditions. To quantify the uniformity of the resulting force distribution, the Force Imbalance Index was defined as the standard deviation of the forces measured by all FSR sensors. A higher index indicates greater variation in contact force, meaning that force is concentrated in some regions and insufficient in others. In contrast, a lower index reflects more even pressure distribution across the contact surface.
As shown in Fig. 4c, the rigid anchoring system exhibited the highest Force Imbalance Index, indicating strong force localization. The soft anchoring system, while structurally compliant, resulted in the lowest imbalance due to its highly distributed pressure characteristics. The proposed chain-linking anchoring structure showed an imbalance index that was significantly lower than the rigid system and comparable to the soft anchoring system, despite providing higher mechanical stiffness.
Statistical analysis confirmed that the Force Imbalance Index for the soft anchoring system was significantly lower than that of the rigid system (\(p = 0.0139\)), while no significant difference was found between the soft and proposed systems (\(p = 0.265\)). This indicates that the proposed design maintains the desirable pressure distribution properties of soft structures while improving force transmission performance. Such balance between stiffness and pressure uniformity is essential for wearable systems aiming to maximize both assistive output and long-term comfort.
Discussion
The results of this study demonstrate that the proposed chain-linking anchoring structure effectively resolves a critical trade-off in wearable robot design: achieving high force transmission efficiency while maintaining user comfort. A series of human and dummy-based experiments confirmed that the structure delivers improved mechanical performance without introducing the discomfort typically associated with rigid anchoring systems.
In human subject experiments, the proposed anchoring system resulted in a 34.2% increase in transmitted force under identical actuator conditions compared to a conventional soft structure. Despite this improvement, overall comfort ratings remained comparable, and users reported a significantly greater sense of assistance. These findings suggest that the system not only transmits more force but does so in a manner that users can clearly perceive. This perceptibility is important for enhancing system transparency and user engagement in assistive wearable devices.
Dummy-based stiffness measurements further confirmed that the proposed anchoring design achieved 16.3% higher system stiffness compared to the conventional soft anchoring. This increase corresponds to a reduction in displacement of approximately 14.3% under equivalent loading. For actuators such as pneumatic artificial muscles, which are highly sensitive to elongation, this increased stiffness directly contributes to improved force delivery. However, stiffness alone is insufficient; spatial distribution of the applied force is also crucial to avoid concentrated pressure and discomfort.
Force distribution measurements showed that the proposed structure maintained a Force Imbalance Index comparable to that of a fully soft system, despite offering significantly higher stiffness. This indicates that the anchoring system’s anisotropic mechanical properties–high stiffness in the direction of force transmission and low stiffness in the transverse direction–help mitigate uneven pressure and improve overall pressure uniformity. In effect, the design preserves the pressure distribution advantages of soft interfaces while overcoming their limitations in load transfer.
These findings emphasize the benefits of structurally embedding directional mechanical characteristics into wearable interfaces, rather than relying solely on active control strategies or personalized fabrication methods. The proposed chain-linking design is passive, lightweight, manufacturable, and potentially adaptable across different body locations and assistive scenarios. The study targeted the mechanical-efficiency and comfort trade-off; detailed analyses of manufacturability, fatigue, and long-term durability were outside scope. No damage was observed within the tested loads and durations; durability will be quantified in future accelerated cyclic and environmental tests.
In conclusion, the proposed anchoring structure offers a practical and scalable solution for enhancing both assistance and wearability in soft wearable robots. It addresses a fundamental challenge in the field by balancing stiffness and comfort through structurally programmed mechanics.
Methods
Chain-linking structure for anisotropic stiffness
Achieving both comfortable wearability and high force transmission efficiency requires a clear understanding of force transmission mechanics in wearable robots. Our analysis identified significant deformation in the shear directions, particularly in anchoring systems with low circumferential stiffness, causing substantial force loss. To address this, a structure must provide high stiffness in critical shear directions while maintaining low circumferential stiffness for comfort. This section presents the analysis of force transmission mechanics and the development of an anisotropic stiffness structure to meet these requirements.
Force transmission mechanics in wearable robots
The soft materials used in exosuits offer a lightweight design and comfortable wearability, but also cause large compliance, leading to significant deformation and force loss when transmitting actuator force to the human body. As illustrated in Fig. 5a, the anchoring mechanism in conventional soft wearable robots exhibits low stiffness, causing substantial deformation under load. This reduces the power delivered to the body and delays force transmission. Notably, this issue is particularly critical for nonlinear actuators such as pneumatic artificial muscles, whose force capacity depends on length. Their nonlinear characteristics further exacerbate power loss during transmission.

Anchoring mechanism in soft wearable robots. (a) Conventional soft anchoring systems undergo significant deformation under actuator forces, resulting in substantial force loss. (b) The proposed chain-linking structure minimizes deformation and thereby enhances force transmission efficiency.
Through our observation, the deformation caused by low stiffness primarily occurs in the shear directions. Although stiffness in the vertical direction, aligned with the actuator’s force, might intuitively seem the most critical factor, practical usage reveals otherwise. As illustrated in Fig. 5, conventional soft anchoring systems typically have a greater length in circumferential direction compared to the vertical width or length. Consequently, the compliance of the anchoring system is more pronounced in the circumferential direction, leading to significant shear deformation. This tendency may also be inferred from prior studies on soft wearable robots that implement tight-fitting anchoring designs17,19. In these works, anchoring structures are shaped or actuated to reduce deformation along the surface of the body, implying that shear-direction compliance was a limiting factor. To reduce the deformation that leads to force loss in soft anchoring structures, it is important to increase stiffness along the shear direction, which is parallel to the skin surface, while managing the vertical pressure applied perpendicularly to the body to maintain wearability.
Bending stiffness in the circumferential direction is significant for wearability, whereas shear stiffness is essential for enhancing force transmission efficiency. Low bending stiffness enables the anchoring system to conform closely to the human body, regardless of the shape or circumference of the contact area. This close conformity ensures that the actuator’s force is distributed over a wider area of the body. The wider force distribution minimizes pressure concentration, reducing wearer discomfort. Moreover, the increased contact area enhances the frictional interface, further improving force transmission efficiency.
Anisotropic stiffness structure
As discussed in the previous subsection, effective force transmission requires high shear stiffness, while low bending stiffness is essential for ensuring comfortable wearability. In other words, by exploiting a structure with anisotropic stiffness, it is possible to achieve both effective force transmission and comfortable wearability within a single design. Such structures can be fabricated through material placement or pattern design23,24. In this study, we focused on designing the structure to achieve high shear stiffness and low bending stiffness.
Among various feasible anisotropic structures, we propose a chain-linking structure composed of slender rods connected in a chain-like configuration. This structure satisfies the desired criteria, exhibiting high shear stiffness while maintaining very low bending stiffness. This low bending stiffness in the circumferential direction enhances comfort and allows the structure to adapt to different body shapes and sizes, ensuring a secure fit. Furthermore, it minimizes deformation under actuator forces, improving force transmission efficiency (Fig. 5b). The superiority of this structure over other anisotropic anchoring designs, such as segmented rigid bodies and flexible composites, has been validated in previous work25. This structure is fabricated using an SLS-based 3D printing technique, utilizing nylon powder in this study. Its ability to be manufactured as a single integrated piece simplifies production, enhancing its applicability across various fields.
Parameter design of chain-linking structure
Implementing an anchoring system that enhances both comfort and force transmission efficiency requires detailed analysis of the chain-linking structure. This section focuses on two key parameters that significantly influence anchoring performance.
The first parameter is the rigid part ratio, which indicates the proportion of the chain-linking structure relative to the total circumference of the human body (Fig. 6a). Selecting an appropriate ratio is crucial, as it directly affects both force transmission efficiency and wearer comfort. A higher ratio increases shear stiffness, improving force transfer (Fig. 6b), but excessive values reduce flexibility and adaptability, leading to discomfort. Conversely, a lower ratio weakens stiffness, diminishing force transmission. Thus, the rigid part ratio was determined to balance mechanical performance and wearer adaptability, ensuring both effective force transmission and a comfortable fit.

Analysis of the rigid part ratio (\(\lambda\)), a key parameter influencing the overall system stiffness (\(K_{\text {system}}\)) of the anchoring structure. (a) A sectional view illustrating the parameters that define \(\lambda\). (b) Conceptual relationship between \(\lambda\) and \(K_{\text {system}}\). As \(\lambda\) increases, the contribution of the chain-linking structure to overall stiffness becomes more significant, initially enhancing system stiffness. However, beyond a certain point, the increased length of the chain-linking structure leads to reduced structural stiffness, thereby decreasing the rate of stiffness improvement. This figure is presented as a conceptual illustration, not an empirical plot derived from the equations.
The second parameter is the point of application (PoA), which refers to the vertical position where the actuator force is applied to the anchoring system. Depending on the PoA, a moment is induced in the structure, which can cause localized pressure, leading to skin deformation and discomfort, or reduce friction, diminishing force transmission. Selecting an appropriate PoA is essential for maximizing force transmission efficiency, and the following subsection provides a detailed analysis of this effect.
The following subsections sequentially address these two parameters. First, the effects of each parameter on anchoring performance are mathematically modeled, followed by experimental validation using a dummy setup to observe tendencies. Based on the results of the mathematical model and experiments, optimal parameter values are determined.
Design variable 1: rigid part ratio
As previously mentioned, the rigid part ratio is a parameter that directly influences the overall stiffness of the system. It is represented as the length of the chain-linking structure relative to the total circumference of the anchoring system, which is defined along the circumferential direction around the limb.
Here, \(\lambda\) denotes the rigid part ratio, expressed as the length of the chain-linking structure (\(L_{chain}\)) relative to the total circumference (\(L_{total}\)) of the anchoring system. The remaining portion of the circumference, \(L_{fabric}\), primarily consists of fabric webbing but may also include components like buckles.
Based on this definition, the overall stiffness of the system can be expressed as follows:
Here, \(K_{\text {system}}\) denotes the overall stiffness of the anchoring–leg system. \(F_a\) is the actuator force and \(\theta\) is the angle between the actuator line of action and the thigh. \(\delta _{\text {total}}=\delta _{\text {chain}}+\delta _{\text {fabric}}\) is the total deformation, where \(\delta _{\text {chain}}=L_{\text {chain}}\tan (\gamma _{\text {chain}})\) and \(\delta _{\text {fabric}}=L_{\text {fabric}}\tan (\gamma _{\text {fabric}})\). \(L_{\text {chain}}\) and \(L_{\text {fabric}}\) are the engaged lengths of the chain-linking part and the remaining fabric part, with \(L_{\text {total}}=L_{\text {chain}}+L_{\text {fabric}}\) and \(\lambda =L_{\text {chain}}/L_{\text {total}}\). \(\gamma _{\text {chain}}\) and \(\gamma _{\text {fabric}}\) are the shear angles of each section; they are related to the applied load through the effective shear parameters \(G_{\text {chain}}\) and \(G_{\text {fabric}}\) such that \(\gamma \approx F_a/G\) in our model.
The overall stiffness of the system, \(K_{system}\) represents the resistance to deformation under the actuator force, \(F_a\), applied at an angle \(\theta\). This stiffness is related to the total deformation, \(\delta _{total}\), which can be expressed as the sum of the deformation in the chain-linking structure, \(\delta _{chain}\), and the deformation in the remaining portion, \(\delta _{fabric}\). The shear strain, \(\lambda\), and the shear modulus, G, for each section further define the deformation characteristics.
Since the shear modulus of the chain-linking structure is significantly higher than that of the remaining portion, a higher rigid part ratio results in an increased overall stiffness of the system (Fig. 6b). However, as the rigid part ratio increases, the length of the chain-linking structure also becomes longer, which reduces its stiffness. Consequently, an excessively high rigid part ratio reduces the effectiveness of stiffness improvement, leading to a diminished rate of increase in overall system stiffness, as shown in Fig. 6b. Furthermore, an overly long chain-linking structure can lower the force capacity, increasing the risk of failure under high loads.
Figures 7a and b present the experimentally measured stiffness (\(K_{chain}\)) and force capacity of the chain-linking structure as functions of \(L_{chain}\). Using the testbed shown in Fig. 7a, the shear stiffness of chain-linking structures with lengths of 50 mm, 100 mm, 150 mm, and 200 mm was measured. One end of the chain-linking structure was fixed to the base, while the other end was pulled using a force gauge (ASM-1000, DigiTech Inc.) at a speed of 120 mm/min until a force of 500 N was recorded. The relationship between the applied displacement and the corresponding force was logged under consistent loading conditions, ensuring comparable results across all rigid part ratios (Fig. 7b). Stiffness was defined as the average slope of the force-displacement curve during measurement. As indicated in the figure, \(K_{chain}\) decreases significantly as \(L_{chain}\) increases.

Empirical analysis of the rigid part ratio (\(\lambda\)). (a) Testbed used to measure the stiffness of the chain-linking structure (\(K_{\text {system}}\)) at varying lengths, and (b) corresponding results. As the length of the chain-linking structure increases, its stiffness decreases significantly, and the maximum force it can withstand is also reduced. (c) Testbed used to evaluate system stiffness as a function of \(\lambda\), and (d) the measured results. While higher \(\lambda\) values lead to increased system stiffness, the rate of improvement diminishes at larger values. The differing trends in (b) and (d) reflect the distinction between the stiffness of the structure itself and the overall system stiffness, as explained in Fig. 7b. Additionally, larger \(\lambda\) values lower the structure’s maximum force capacity, highlighting the need to select an optimal \(\lambda\).
While the reduction in stiffness with increasing length is notable, the decrease in maximum force capacity is an even more critical factor for robot design. For instance, the 50 mm chain-linking structure withstood forces up to 500 N without failure, whereas the 100 mm, 150 mm, and 200 mm structures failed at forces of 213.5 N, 137.8 N, and 92.3 N, respectively. Consequently, the maximum length of the chain-linking structure must be constrained based on the force requirements of the actuator and the pressure tolerance of the body part where the anchoring system is applied. In the prototype developed for this study, the chain-linking anchoring system was designed for a hip extension assistance system, where the actuator applies force to the thigh, taking into account loading conditions to ensure stable operation.
The overall stiffness of the system was also measured as a function of the rigid part ratio, as shown in Figs. 7c and d. As depicted in the left photo of Fig. 7c, the experiment was conducted using five groups with rigid part ratios of 0%, 16.6%, 25%, 50%, and 75%. The results, presented in Fig. 7d, indicate that the overall stiffness increases with higher rigid part ratios, but the rate of increase diminishes as the ratio becomes larger, which is consistent with the preliminary trend shown in Fig. 6b. This trend is attributed to the previously discussed effect of the increased length of the chain-linking structure, which reduces its stiffness, as shown in Fig. 7b. In this study, the rigid part ratio was selected by considering the loading conditions required for the prototype’s intended purpose and the desired overall stiffness of the system.
Design variable 2: point of application
As previously mentioned, the point of application (PoA) influences the moment induced in the anchoring system when actuator forces are applied, thereby affecting body pressure and friction (Fig. 8). A suitably induced moment can increase the contact pressure between the anchoring structure and the body, enhancing frictional force. However, an excessive moment can lead to concentrated pressure on specific regions, significantly increasing discomfort and inducing substantial deformation of soft tissue, which in turn causes considerable loss in force transmission. Conversely, if the moment is too small or directed oppositely, the frictional force may become insufficient, resulting in further loss of actuator force transferred to the body.
Therefore, selecting an appropriate point of application is critical to achieving high force transmission efficiency while minimizing wearer discomfort. To analyze this relationship, the following equations define the induced moment and its mechanical interaction with the anchoring configuration.

Analysis of the point of application (PoA) and its effect on anchoring stiffness and pressure distribution. (a) Section view illustrating the parameters that define the PoA. (b) Conceptual diagram showing how the moment induced in the anchoring structure changes with the PoA when actuator forces are applied. A PoA that is too small leads to concentrated pressure on specific areas, causing discomfort, while an excessively large PoA reduces contact pressure and frictional force, resulting in the anchoring system being pulled upward. Note that this figure is intended as a conceptual illustration of the expected parameter relationships, not as an exact plot derived from the analytical model.
Here, \(\tau\) represents the moment induced in the anchoring system, expressed as the product of the moment arm (\(M_{\text {chain}}\)) and the actuator force (\(F_{\text {Actuator}}\)). The variable x denotes the vertical point of application measured from the lower end of the anchoring structure.
As shown in the equation, the induced moment \(\tau\) varies significantly with x, including a change in sign as x passes through a certain threshold. For a given actuator angle \(\theta\), there exists a specific point of application where the moment becomes zero, beyond which its direction reverses. When x is small, the resulting moment tends to lift the lower part of the anchoring structure away from the body while pressing the upper part against the body (Fig. 8b). This pressure concentration leads to localized deformation of soft tissue, which not only reduces force transmission efficiency but may also cause discomfort to the wearer.
Conversely, as x increases, the moment magnitude decreases and eventually reverses direction, causing the upper part of the anchoring system to lift away from the body. This reduces contact pressure and frictional stability, resulting in diminished force transmission. Therefore, selecting an appropriate value of x is essential to balancing system stiffness and user comfort.
Figure 9 presents the experimental setup used to analyze the effect of the point of application. As shown in Fig. 9a, a testbed was used to evaluate system stiffness while varying x. The results in Fig. 9b show that stiffness increases with x, although the rate of increase diminishes at higher values. Due to practical limitations in the experimental setup, stiffness could not be measured for values of x beyond the tested range. However, the fitted polynomial trend suggests that the stiffness may reach a peak near the observed range and could begin to decline if x is increased further.

Empirical analysis of the point of application (PoA). (a) Locations where actuator force was applied to the anchoring structure, with the vertical distance from the lower edge labeled from 0 mm to 60 mm. (b) Experimental results showing the system stiffness measured at each PoA. Stiffness increased with higher PoA values; however, the rate of increase diminished, suggesting convergence toward an optimal region.
Considering the analytical results and practical fabrication constraints, the final value of x was selected. Combined with the previously determined optimal rigid part ratio, the complete chain-linking anchoring structure was finalized and integrated into the wearable robot. This iterative design process enabled maximized force transmission efficiency, with the proposed anchoring achieving approximately 34.2% improvement as presented in the Results section. The finalized design not only reflects a mechanically optimized solution but also establishes a practical basis for real-world implementation in wearable robotic systems.
Experimental information
All experimental procedures involving human participants were approved by the Yonsei University Institutional Review Board (IRB No. 7001988-202402-HR-1812-03). All methods were conducted in accordance with the relevant institutional guidelines and regulations. Recruitment followed IRB-approved inclusion and exclusion criteria. Written informed consent was obtained from all participants before any study activity. All procedures were non-invasive and classified as minimal risk. Participants retained the right to withdraw at any time without penalty. All data were anonymized prior to analysis, and any images used were non-identifiable with participant consent.
Data availability
The datasets generated and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Thalman, C. & Artemiadis, P. A review of soft wearable robots that provide active assistance: Trends, common actuation methods, fabrication, and applications. Wearable Technol. 1, https://doi.org/10.1017/wtc.2020.4 (2020).
Polygerinos, P. et al. Soft robotics: Review of fluid-driven intrinsically soft devices; manufacturing, sensing, control, and applications in human-robot interaction. Adv. Eng. Mater. 19, 1700016. https://doi.org/10.1002/adem.201700016 (2017).
Asbeck, A. T., De Rossi, S. M. M., Galiana, I., Ding, Y. & Walsh, C. J. Stronger, smarter, softer: Next-generation wearable robots. IEEE Robotics & Autom. Mag. 21, 22–33. https://doi.org/10.1109/MRA.2014.2360283 (2014).
Wehner, M. et al. A lightweight soft exosuit for gait assistance. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), 3362–3369, https://doi.org/10.1109/ICRA.2013.6631046 (IEEE, 2013).
Slade, P., Kochenderfer, M. J., Delp, S. L. & Collins, S. H. Personalizing exoskeleton assistance while walking in the real world. Nature 610, 277–282. https://doi.org/10.1038/s41586-022-05191-1 (2022).
Witte, K. A., Fiers, P., Sheets-Singer, A. L. & Collins, S. H. Improving the energy economy of human running with powered and unpowered ankle exoskeleton assistance. Sci. Robotics 5, eaay9108, https://doi.org/10.1126/scirobotics.aay9108 (2020).
Kim, J. et al. Reducing the metabolic rate of walking and running with a versatile, portable exosuit. Science 365, 668–672. https://doi.org/10.1126/science.aav7536 (2019).
Quinlivan, B. T. et al. Assistance magnitude versus metabolic cost reductions for a tethered multiarticular soft exosuit. Sci. Robotics 2, eaah4416, https://doi.org/10.1126/scirobotics.aah4416 (2017).
Collins, S. H., Wiggin, M. B. & Sawicki, G. S. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 522, 212–215. https://doi.org/10.1038/nature14288 (2015).
Moon, J. et al. Reducing sprint time with exosuit assistance in the real world. Sci. Robotics 8, eadf5611, https://doi.org/10.1126/scirobotics.adf5611 (2023).
Lee, D., Lee, S., Lee, D. & Shin, D. A soft wearable robot with an adjustable twisted string actuator and a two-stage transmission mechanism for manual handling tasks. Adv. Intell. Syst. https://doi.org/10.1002/aisy.202400700. First published: 08 January (2025).
An, J. et al. Fabric integrated wearable glove with a twisted string actuator for manual handling tasks. Sci. Reports 15, 13185. https://doi.org/10.1038/s41598-025-96428-2 (2025).
Kim, N., Park, J. & Shin, D. Impedance for assistance: Upperlimb assistive soft robotic suit using linkedlayer jamming mechanisms. Soft Robotics 11, 970–983. https://doi.org/10.1089/soro.2023.0146 (2024).
Lee, D., Kim, S., Park, H., Kim, S. & Shin, D. A spine assistive robot with a routed twisted string actuator and a flat-back alleviation mechanism for lumbar-degenerative flat back. IEEE/ASME Transactions on Mechatronics 27, 5185–5196. https://doi.org/10.1109/TMECH.2022.3175298 (2022).
Zhou, Y. M. et al. A portable inflatable soft wearable robot to assist the shoulder during industrial work. Sci. Robotics 7, eabg8851, https://doi.org/10.1126/scirobotics.adi2377 (2024).
Cho, J., Lee, S., Park, K. & Ko, Y. Effects of calf anchoring compression levels on ankle kinematics, motor unit behavior, energy cost, and discomfort during walking. In ISBS Proceedings Archive 41, 21 (2023).
Choi, H., Kang, B., Jung, B.-K. & Cho, K.-J. Exo-wrist: A soft tendon-driven wrist-wearable robot with active anchor for dart-throwing motion in hemiplegic patients. IEEE Robotics Autom. Lett. 4, 4499–4506. https://doi.org/10.1109/LRA.2019.2931607 (2019).
Liu, T. et al. A positive pressure jamming based variable stiffness structure and its application on wearable robots. IEEE Robotics Autom. Lett. 6, 8078–8085. https://doi.org/10.1109/LRA.2021.3097255 (2021).
Yun, S.-S., Bundschu, C. W. & Cho, K.-J. A hybrid anchoring technology composed of reinforced flexible shells for a knee unloading exosuit. Soft Robotics 10, 873–883. https://doi.org/10.1089/soro.2021.0223 (2023).
Hussain, S. & Ficuciello, F. Advancements in soft wearable robots: A systematic review of actuation mechanisms and physical interfaces. IEEE Transactions on Medical Robotics and Bionics PP, 1–1, https://doi.org/10.1109/TMRB.2024.3407374 (2024).
Piao, J. et al. Development of a comfort suit-type soft-wearable robot with flexible artificial muscles for walking assistance. Sci. Reports 13, 4869. https://doi.org/10.1038/s41598-023-32117-2 (2023).
Ferroni, R. et al. A soft pneumatic exosuit to assist pronosupination in individuals with spinal cord injury. Adv. Intell. Syst. 7, https://doi.org/10.1002/aisy.202500124 (2025).
Zhu, R. et al. Soft robots for cluttered environments based on origami anisotropic stiffness structure (oass) inspired by desert iguana. Adv. Intell. Syst. 5, 2200301. https://doi.org/10.1002/aisy.202200301 (2023).
Zhang, J. et al. Bio-inspired tensegrity building block with anisotropic stiffness for soft robots. IEEE/ASME Transactions on Mechatronics PP, 1–12, https://doi.org/10.1109/TMECH.2025.3532491 (2025).
Jeong, G. Development and analysis of chain-linking anchoring for pneumatic-muscle-based military exosuits (in Korean). M.s. thesis, Yonsei University, Seoul, Republic of Korea (2024).
Funding
This work was supported in part by the Ministry of Trade, Industry & Energy (Korea) under the Industrial Technology Innovation Program under Grant 20007058, and in part by National Research Foundation of Korea (NRF) Grant funded by the Korean government (MSIT) under Grant RS-2023-00208052.
Author information
Authors and Affiliations
Contributions
N.K. and G.J. contributed equally to this work. N.K. proposed the research idea, conducted early-stage validation, performed experiments, and contributed to manuscript preparation. G.J. designed and fabricated the system, conducted experiments, and contributed to manuscript preparation. S.L. assisted with experiments and contributed to writing and editing the manuscript. S.Y. developed the electronic hardware and control system. S.R.L. developed and fabricated the pneumatic artificial muscles. D.S. supervised the project, acquired funding, validated the results, and reviewed and edited the manuscript. All authors reviewed and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Kim, N., Jeong, G., Lee, S. et al. Effective and comfortable chain-linking anchoring with anisotropic stiffness for soft wearable robots. Sci Rep 15, 41014 (2025). https://doi.org/10.1038/s41598-025-24738-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-24738-6
