
Abstract
Proper maintenance of civil infrastructure, such as cable-stayed bridges, is critical to ensuring safe and efficient logistics and transportation. Prestressed concrete (PSC) box girders in such bridges are particularly vulnerable to corrosion-induced strand deterioration. Existing methods often overlook system-level behavior or rely on computationally intensive simulations. This study proposes a deep learning-based framework to evaluate the time-dependent reliability of cable-stayed bridges with corroded PSC box girders. We develop a finite element model of the Hwayang-Jobal Bridge to simulate progressive structural degradation over time. A deep neural network (DNN) is then trained to predict the flexural characteristics of PSC box girders under varying corrosion levels and cross-sectional properties. The DNN outputs are then integrated into the global bridge model to enable efficient, Monte-Carlo-based system reliability analysis. The proposed framework incorporates various sources of uncertainty, including corrosive environmental factors, bridge geometry, and load redistribution within the structural system. Numerical investigations demonstrate the impact of corrosion on structural performance and load redistribution mechanisms. This comprehensive and efficient approach offers a robust tool for evaluating the time-variant reliability of aging bridge systems.
Similar content being viewed by others
Introduction
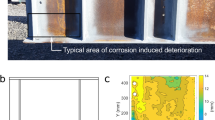
Large-scale bridges play a critical role in supporting urban logistics and connecting distant regions. Ensuring the serviceability and integrity of bridges in-service throughout their lifespan is essential. Many countries have adopted load and resistance factor design and reliability-based limit state design. These approaches ensure that structures meet target reliability levels for nominal loads and strengths under uncertainty. However, loads and strengths vary over the lifespan of a structure due to deterioration and corrosion of components. Such variations can reduce bridge reliability, potentially causing local failures or even collapse1,2,3,4. For instance, in 2016, external tendons in one of the Jeongneungcheon overpass bridges in South Korea failed due to strand corrosion5. Similar failure events have been reported in several countries such as France, Japan, the UK, and the US6,7.
Numerous studies have developed reliability methodologies considering changes in environmental conditions and the deterioration of structural members, especially strands in prestressed concrete (PSC) box girders8,9,10,11,12. Most of these studies evaluated the structural performance through probabilistic modeling of material deterioration and corrosive environments of reinforcing bars. For instance, Tu et al.11 assessed the time-dependent system reliability and redundancy of PSC bridges, and Xu and Azhari12 introduced a Bayesian updating framework to adjust the deterioration model parameters, attaining more credible predictions of the remaining useful life of PSC bridges. Additionally, Kim and Song9 proposed a framework for time-dependent reliability assessment of PSC bridges, incorporating traffic-induced demand variations and the effects of strand corrosion. Pugliese et al.13 proposed a holistic framework for reliability assessment of aged RC bridges, considering non-uniform corrosion, traffic growth, and time-dependent damage progression.
Despite these advances, three key gaps remain in the literature. First, many existing studies assess structural reliability at the component level, failing to capture system-wide effects such as load redistribution due to progressive deterioration. For instance, Kim and Song9 employed simplified equation-based flexural strength evaluations to estimate the structural performance of individual girder, which may not fully reflect the collective behavior of girders across the bridge deck or their joint contribution to system-level demand under varying loading conditions. Second, while machine learning techniques have been applied to local response prediction or material degradation modeling, their integration into full-scale system-level reliability analysis remains limited, particularly under time-dependent uncertainties and high-dimensional inputs14. Third, structural characteristics are often computed under numerous assumptions because reliability assessments with diverse uncertainties are computationally complex. For instance, Straub et al.15 proposed a comprehensive framework for the reliability analysis of deteriorating structural systems. However, their approach does not include numerical demonstrations that incorporate detailed material models for corroded strands (e.g., stress–strain relationships).
Additionally, recent advances in deep learning-based reliability and monitoring frameworks have demonstrated promising capabilities for structural performance prediction. For instance, Lei et al.16 employed Bayesian neural networks to estimate cumulative displacement of bridge girders for operational warning, while Lei et al.17 proposed an active learning-enhanced Bayesian framework for life-cycle performance prediction of coastal and marine PSC beams. These studies highlight the growing role of deep learning in reliability analysis and monitoring of bridges. Building upon such developments, our study focuses on extending deep learning integration to full system-level, time-dependent reliability analysis of cable-stayed bridges, explicitly accounting for corrosion-induced strand deterioration and load redistribution mechanisms.
To address these research gaps, we introduce a deep learning-based framework to efficiently and effectively incorporate various sources of uncertainty and structural-level load redistribution in the time-dependent reliability analysis of deteriorated structures. The proposed framework is applied to a cable-stayed bridge with PSC box girders, explicitly accounting for strand deterioration due to corrosion. The key contributions are the development of a finite element model of the Hwayang-Jobal Bridge, the development of deep neural network (DNN) models to efficiently predict the system-level structural characteristics of PSC box girders under varying corrosion levels and diverse cross-sectional shapes of girders, and integration of the DNN models into time-dependent reliability assessment. The DNN models enable rapid updates to the numerical model of the cable-stayed bridge, supporting comprehensive time-dependent reliability assessments under dead and live loads while accounting for system-level behavior, including load redistribution mechanisms. Although we focus on normal operational states and moderate degradation levels, the framework is applicable to severe deterioration or extreme loads (e.g., earthquakes, typhoons).
The remainder of this paper is structured as follows. Sect. "Time-Dependent Reliability Analysis Framework" provides a general overview of the formulation for time-dependent reliability analysis. Sect. "Investigated Bridge System and Corrosion Model" introduces a case study of the Hwayang-Jobal Bridge, including a description of the finite element model and the probabilistic corrosion models for the girder strands. Sect. "DNN Model for Predicting Hysteretic Parameters" details the development of the DNN models for predicting the structural characteristics of the girder under varying deterioration levels and sectional properties. Sect. "Numerical Investigations" demonstrates the applicability and efficiency of the proposed framework by conducting time-dependent structural performance and reliability assessments of the developed bridge model. Finally, Sect. "Conclusions" concludes the paper with a summary and discussion.
Time-dependent reliability analysis framework
The reliability of the i-th structural component at time \(t\) can be evaluated using a limit state function \({\text{g}}_{i} \left( {{\mathbf{X}},t} \right)\) expressed in terms of a safety margin:
where \({\mathbf{X}}\) is a vector of random variables representing uncertainties in material properties, corrosion processes, and applied loads, \(R_{i} \left( {{\mathbf{X}},t} \right)\) represents the structural capacity of the i-th component, and \(S_{i} \left( {{\mathbf{X}},t} \right)\) denotes the corresponding demand. Failure of the i-th component is indicated when the limit state function \({\text{g}}_{i} \left( {{\mathbf{X}},t} \right) \le 0\).
The point-in-time failure probability (at a fixed time \(t\)) under a time-varying hazard can be expressed as:
The instantaneous reliability index \(\beta_{i} \left( t \right)\) can then be estimated as
where \({\Phi }^{ - 1} \left( \cdot \right)\) denotes the inverse cumulative distribution function (CDF) of the standard normal distribution. While this instantaneous reliability index provides a quantitative measure of structural performance at a given time \(t\), it does not account for the cumulative effects of reliability performance over time. This limitation can lead to misinterpretation if used as the sole decision metric.
To consider the accumulated failure events up to time point \(t\), the first-passage failure probability over a time interval \(\left[ {0,t} \right]\) is defined as:
The asterisk in Eq. (4) indicates the inclusion of failure events over the time interval. This formulation captures the likelihood of failure over time rather than at a single time point.
Time-variant reliability problems are typically transformed into an equivalent time-invariant (static) reliability problem to facilitate computation. Common transformation techniques include the out-crossing method19, the extreme value method20, and the discretization method15,21. We adopt the discretization method, which reformulates the time-dependent reliability problem as a series system reliability problem over discretized time intervals.
To implement this, the service life up to time \(t_{m}\) is discretized into \(m\) intervals indexed by \(k = 1, \ldots , m\), corresponding to \(\tau \in \left( {t_{k - 1} ,t_{k} } \right]\). A time sequence \(\left[ {t_{0} , \ldots ,t_{k} , \ldots ,t_{m} } \right] = \left[ {0, \ldots ,k{\Delta }t, \ldots ,m{\Delta }t} \right]\) is defined, where \(t_{0} = 0\), \(t_{m} = m{\Delta }t\), and \({\Delta }t\) is the interval duration. The choice of \({\Delta }t\), such as annual intervals, depends on the structure’s service life and desired inspection or maintenance schedule. The first-passage failure probability up to \(t_{m}\) can then be estimated as:
where \(D_{k,i} = \left\{ {{\text{g}}_{i} \left( {{\mathbf{X}},t_{k} } \right) \le 0} \right\}\) represents the failure event at time \(t_{k}\). The corresponding first-passage reliability index is given by:
This transformation reduces the complexity of the time-varying problem by enabling time-invariant reliability analysis methods to be applied within each interval. Discretization errors can be minimized by selecting an appropriately small \({\Delta }t\). Note that, to account for uncertainties in inspection accuracy or unmodeled deterioration, a capacity reduction factor can be applied as a conservative adjustment to component capacities, analogous to partial safety factors used in design codes.
The first-passage probability in Eq. (5) can be estimated through Monte Carlo simulation (MCS). However, it requires repetitive evaluations of finite element models, resulting in significant computational costs15,22,23. This computational burden is further amplified for large-scale structures with numerous random variables. Advanced system reliability methods19,24,25 can mitigate these computational efforts, but their application to high-fidelity systems, such as cable-stayed bridges, still presents significant challenges and remains computationally intensive.
Investigated bridge system and corrosion model
This section presents the finite element model of a PSC box girder cable-stayed bridge, specifically the Hwayang-Jobal Bridge in South Korea, and introduces corrosion models to represent the deteriorated material properties of steel strands in the PSC box girder. The necessary bridge specifications, such as node coordinates, section and material properties, and element characteristics, are extracted from the structural calculation document of the bridge provided by the Korea Bridge Design and Engineering Research Center.
Investigated bridge system
The Hwayang-Jobal Bridge, a cable-stayed bridge connecting Yeosu and Goheung in South Korea, is selected as the case study for the proposed framework. The bridge features a PSC box girder, with tendons each consisting of 22 steel strands in a single duct. It spans a total length of 854 m (main span 500 m), and accommodates two lanes of traffic, as illustrated in Fig. 1. We develop finite element models using OpenSees26 and a commercial structural program, MIDAS/CIVIL. The numerical model implemented in OpenSees is used for the reliability analysis, while the other is employed for cross-verification purposes.

Configuration of the Hwayang-Jobal Bridge.
Because the stiffening-girder cross-section varies continuously along the span, we discretize it into nine cross-sections (Fig. 2). However, the number of strands within the stiffening girder varies, resulting in a total of 15 different cross-sectional cases. These cross-sectional cases are indexed in Fig. 1 and summarized in Table 1. Note that the “Index” column in Table 1 corresponds to the numbers depicted within circles in Fig. 1. Since the stiffening girder is symmetric, only half of the girder indices are displayed.

Configurations of the cross sections of the bridge deck.
To minimize the computational costs in numerical analyses, the “nonlinearBeamColumn” command, coupled with the “Aggregator” command in OpenSees, is employed to represent the mechanical properties of the stiffening girder. The sectional properties used in the “Aggregator” command are derived from a moment–curvature analysis performed using a fiber section. In other words, the bridge deck model is developed using a fiber section, and the results of the moment–curvature analysis are subsequently utilized in modeling the bridge structure via the “Aggregator” command. The material properties presented in Table 2 are used to model the fiber section, with the “Steel02” and “Concrete02” employed for steel and concrete, respectively. Moreover, the “Hysteretic” command is employed to represents strands, with the “InitStrainMaterial” command to account for the effect of prestressing. We demonstrate that the stiffness of bridge decks, estimated from the moment–curvature analysis, closely aligns with the stiffness values used in the fishbone numerical model presented in the structural calculation document. Note that the fiber section model and moment–curvature analysis are later utilized to develop a database of the structural characteristics of the bridge deck under various deterioration levels, which will be discussed in Sect. "DNN Model for Predicting Hysteretic Parameters".
Other types of structural elements, such as piers and pylons, are modeled using linear elastic frame elements, while a bilinear tension-only material in conjunction with a truss element is adopted for the cable. The Young’s modulus of the truss element is estimated using Ernst’s formula27,28, while yield stress of 1770 MPa and post-yield stiffness ratio of 1% are employed to characterize its plastic behavior. Initial cable stresses are incorporated into the numerical model using the “InitStrainMaterial” command. In addition, linear springs are used to model the bridge bearings to simplify the modeling process. Note that only linear elements are utilized to model the cable-stayed bridge using MIDAS/CIVIL. This simplification may have certain limitations but provides a reasonable approximation for the purpose of cross-verification. Because most components are modeled as linear, the system has limited capacity to capture nonlinear behavior under extreme loading or severe deterioration, even though the cable and deck components themselves can be modeled nonlinearly.
To ensure the accuracy of the constructed numerical model, a cross-verification process is performed by comparing the displacement and member forces at the midspan under dead loads. The results of this comparison are presented in Table 3. Note that the numerical model adopts the x, y, and z axes to represent the longitudinal, transverse, and vertical directions, respectively, as depicted in Fig. 1. Table 3 demonstrates a strong agreement between the analysis results obtained from the numerical models developed using both OpenSees and MIDAS/CIVIL. Note that due to the negligible displacement observed in the longitudinal and transverse directions under dead loads, these values are excluded from the table. Moreover, Table 4 presents a comparison of the modal periods estimated by both programs, showing close correspondence between the results. These modal periods also align with those documented in the structural calculation report of the Hwayang-Jobal Bridge.
Corrosion model
Corrosion of steel strands is the main reason for the deterioration of PSC girder, which initiates and propagates by the chemical reaction between iron ions, water, and oxygen. This process is influenced by various environmental factors, including voids, concrete and rebar quality, and humidity, which inevitably includes various random variables and approximations. Based on corrosion science research29,30, the maximum pit depth at time \(t\) for high-quality steel strands can be determined using the following:
where \(i_{corr}\) is the corrosion current density, \(R_{pen}\) represents the penetration ratio (i.e., the ratio of the maximum penetration to its average), and \(T_{i}\) is the corrosion initiation time. The corrosion initiation time is predicted by Fick’s second law of diffusion31,32 with an assumption of a constant chloride concentration at the surface given by:
in which \(C\) is the concrete cover thickness, \(D_{c}\) is the chloride diffusion coefficient, \(C_{0}\) is the constant chloride concentration at the surface, \(C_{cr}\) is the threshold of the chloride concentration, and \(erf\left( \cdot \right)\) denotes the error function. Equation (8) is based on the physical phenomenon that the corrosion process is triggered once the concentration of chloride at the surface exceeds a threshold value. Note that Eq. (7) with a coefficient of 0.0116 instead of 0.0035 is often used to predict the maximum pit depth of typical reinforcing bars.
The loss ratio of wire cross-sectional area, \(\eta\), can be calculated based on the predicted maximum pit depth using the following equation, which depends on the pit configuration33:
where \(\theta_{1} = \arccos \left( {1 - \frac{p\left( t \right)}{{2r}}} \right)\), \(\theta_{2} = \arccos \left( { - \frac{p\left( t \right)}{{2r}}} \right)\), \(\theta_{3} = \arccos \left( { - \frac{p\left( t \right)}{r}} \right)\), \(r\) is the radius of a wire, \(A_{0}\) is the cross-sectional area of uncorroded wire (\(= \pi r^{2}\)), and \(RV_{\eta }\) is the random variable that select the pit configuration for each corrosion process. The details of pit configuration can be found in Fig. 2 of Jeon et al.33.
The ultimate stress and strain can be determined based on the loss ratio of the cross-sectional area of the wire. In this study, a stress–strain material model proposed by Jeon et al.33,34 is adopted, which utilizes a bi-linear model to express the yield and ultimate stress–strain relationship. The equations for the ultimate stress and strain of the corroded wire are respectively written by34
where \(f_{u, c}\) and \(f_{u}\) are respectively the ultimate stress of corroded and uncorroded steel wire, and \(\varepsilon_{u, c}\) and \(\varepsilon_{u}\) are respectively the ultimate strain of corroded and uncorroded steel wire. Note that \(f_{u} = 1,865 {\text{Mpa}}\), while \(\varepsilon_{u} = 0.075\), as specified in Table 2. On the other hand, the yield strength and strain are respectively given as33
where \(f_{y, c}\) and \(f_{y}\) are respectively the yield stress of corroded and uncorroded steel wire; and \(\varepsilon_{y, c}\) and \(\varepsilon_{y}\) are respectively the ultimate strain of corroded and uncorroded steel wire. Note that \({f}_{y}=\text{1,628} \text{Mpa}\) and \({\varepsilon }_{y}=0.009\), as illustrated in Table 2.s
As mentioned earlier in this subsection, the corrosion process is affected not only by variables in Eqs. (7) to (9) but also by environmental factors such as pH, carbonation depth, water-cement ratio, and voids affect the corrosion behavior. To account for such uncertain surrounding environments, a categorization approach is introduced, following Kim and Song9, instead of assigning random variables to each individual strand. Four categories of corrosive environments are defined, as described in Table 5, where \({C}_{dp}\) represents the carbonation depth. Such discretization is based on related literature and guidelines of the current practice of structure safety inspection35,36, and more detailed information can be found in Kim and Song9. Moreover, the probability distribution and its associated parameters that vary along with the corrosive environment are presented in Table 5. Note that details regarding the parameters that do not vary with the corrosive environment can be found in Sect. "DNN Model for Predicting Hysteretic Parameters".
DNN model for predicting hysteretic parameters
A deep learning-based prediction model is proposed for calculating the deteriorated material properties with minimal computational costs. While the framework is initially designed for PSC box girder cable-stayed bridges and corrosion model described in Sect. "Investigated Bridge System and Corrosion Model", other types of structural systems and deterioration processes are also applicable.
DNN models
One of the crucial computational bottlenecks in the time-dependent reliability analysis framework of the deteriorated structure is the calculation of the degraded strength and stiffness of the structural components over time. To address this challenge, this study proposes a deep learning approach to efficiently predict the yield and ultimate points of the moment–curvature behavior of bridge sections. Four different DNN models are required to cover both the y- and z-axes (i.e., clockwise and counterclockwise about each axis), but because of the symmetry about the z-axis as shown in Fig. 2, the total number of DNN models is reduced to three: positive and negative flexural about the y-axis, and one flexural about the z-axis. The standard sign convention for the moment is adopted in this study. Note that we found the axial strength of the bridge decks (i.e., along the x-axis) does not vary significantly with the level of deterioration.
Since the bridge girder comprises deteriorated (strand) and undeteriorated materials (concrete and reinforcing bars), two types of input data are defined for the DNN models: the level of corrosion of strands, and the cross-sectional shape. We assume that the section loss of strands in the same corrosive environment category is identical. Thus, the amount of section loss (four variables) and the number of strands (four variables) for each corrosive category are enough to define the level of corrosion of strands. Note that since the corrosion of strands serves as a primary factor contributing to the reduction in the strength of PSC box girders, we focus on the corrosion of strand and categorize the concrete and other reinforcing bars as undeteriorated material in predicting the structural characteristics. However, this framework can be extended in the future to incorporate additional material deterioration factors. To represent the remaining part, the cross-sectional shape of the bridge deck is employed, inspired by Kim et al.21,37. Because of the symmetry of the cross-sectional shape about the z-axis, only half of the diagram is utilized, which reduces the dimensionality of the input.
To extract features from the cross-sectional information, a convolutional neural network (CNN) is introduced. More specifically, we use 11 × 31 pixel images (with the same pixel size in height and width) to represent the cross section. This resolution is selected as a trade-off between computational efficiency and geometric fidelity: finer discretization is tested but do not lead to noticeable improvements in predictive performance while substantially increasing computational cost, whereas coarser discretization fails to capture the distinctive geometry of PSC box girders. The features extracted from the cross-sectional shape are then merged with those representing the level of corrosion of the strands to form a deep neural network that predicts the yield and ultimate points of the moment–curvature behavior of the bridge deck (two variables for each point). Figure 3 illustrates a schematic diagram of the DNN architecture, which consists of three distinct feature extraction components (CNN2D, ANN1, and ANN2).

Schematic of the DNN model.
In the DNN models, each feature extraction component (CNN2D, ANN1, and ANN2 in Fig. 3) is designed with three hidden layers. Experimental analysis indicates that using only two hidden layers led to underfitting, while increasing the depth beyond four layers yields minimal performance improvement. Therefore, a three-layer architecture is adopted as a balanced choice between model capacity and efficiency. Rectifier Linear Unit (ReLU) is used as the activation function after the hidden layers, and batch normalization is applied to improve convergence and prevent overfitting. We predict log-targets with a linear output. Furthermore, max pooling is utilized in the CNN part of the proposed DNN models. The number of units in the hidden layers is determined using a Bayesian optimization algorithm, which utilizes a subset of the constructed database from Sect. "Database of the structural characteristics along with corrosion scenarios". The results are summarized in Table 6.
Database of the structural characteristics along with corrosion scenarios
A database of structural characteristics for various corrosion scenarios is simulated to train the DNN models. To this end, deterministic and probabilistic parameters are first identified and listed in Table 7 based on relevant literature and guidelines35,36,38. Using the parameters in Tables 5 and 7 with Eqs. (7) to (9), 1000 sets of the section loss ratio of strands for the four corrosive environment categories are generated, representing conditions over a 100-year service life. Of these sets, 44 sets exhibit no section loss because some inspection times occur shortly after bridge opening. Thus, 956 sets of section loss are used for constructing the database, following the flowchart illustrated in Fig. 4. In addition to the section loss ratios, 72 sets of the ratio of the number of strands between the four categories are randomly generated to account for numerous corrosion cases, resulting in a total of 68,832 (\(=956\times 72)\) scenarios.

Flowchart for calculating the section-loss ratio.
Analyses are carried out to estimate the moment–curvature diagram for the generated possible corrosion scenarios. Although the bridge deck consists of 15 different sections as summarized in Table 1 and illustrated in Fig. 1, the structural characteristics of Index 15 in Table 1 do not vary over time because no strands are included in such a section. This leads us to consider only 14 different sections in the deep learning-based structural characteristic prediction, thus, a total of 963,648 (\(=\text{68,832 }\times 14\)) analyses are performed using OpenSees for each axis of the diagram. In words, 2,890,944 (\(=\text{963,648 }\times 3\)) analyses are performed to fully characterize the structural properties of the bridge deck.
As described in Sect. "Investigated bridge system", moment–curvature analyses are carried out using OpenSees with the "Steel02," "Concrete02,” "Hysteretic," and “InitStrainMaterial” commands with the updated material properties by Eqs. (10) to (13) for a given set of section loss ratio (\({\eta }_{A}, {\eta }_{B}, {\eta }_{C}, \text{and }{\eta }_{D}\)). After performing the moment–curvature analysis, the yield and ultimate points are determined based on the idealization process provided in ASCE/SEI 41–1739, and the results are stored in a database.
Training the DNN models
The DNN models proposed in Sect. "DNN models" are developed using the TensorFlow library18. These models are trained using the database constructed in Sect. "Database of the structural characteristics along with corrosion scenarios". To address the issue of overfitting, 80% of the dataset is selected as the training dataset, while the remaining 20% is used for testing after training. Note that no validation set is used during training to monitor overfitting. Instead, model performance is assessed post-training to determine whether overfitting has occurred. This decision is made because the database constructed for this study is exceptionally large (over 960,000 structural analyses), which allowed us to allocate 20% of the data as an independent test set. This test set is not involved in the training process and is used exclusively to evaluate model performance after training, thereby ensuring an unbiased assessment. Furthermore, hyperparameters such as the number of hidden units are optimized beforehand using a Bayesian optimization algorithm, which reduces the necessity of additional cross-validation or validation monitoring.
We log-transform inputs (section loss, number of strands) and targets to reduce skew and aid convergence. The mean squared error (MSE) is adopted as the loss function, and an Adam optimizer with a learning rate of 0.001 is employed to train the DNN models. Since the optimal number of hidden layer units is determined through a Bayesian optimization algorithm, no additional regularization techniques are applied.
The prediction accuracy of the DNN models for the training and test datasets is summarized in Table 8 after 2000 epochs with a batch size of 256. Training is terminated at 1000 epochs, as no further decrease in the loss function is observed beyond this point. In Table 8, MSE and mean absolute error (MAE) are calculated in the logarithmic scale, while the relative error and R2 are calculated in the original scale (i.e., by converting the predicted output through the exponential function).
As shown in the table, all metrics for both the training and test datasets are consistent, indicating that the DNN models are not overfitting to a specific dataset. Moreover, according to R2 value of 0.99, the prediction trend works well. Moreover, the R2 values of approximately 0.99 across the three DNN models demonstrate a strong correlation between predicted and actual values, confirming the effectiveness of the models in capturing the underlying trends. The models also exhibit high predictive accuracy, with relative errors below 10% across various bridge deck deterioration scenarios. In terms of computational efficiency, the DNN models offer significant advantages compared to moment–curvature analysis performed in OpenSees. Under an Intel i7-1360P processor, a single DNN prediction requires approximately \(8.05\cdot {10}^{-5}\) seconds, while an equivalent OpenSees analysis requires \(8.08\cdot {10}^{-1}\) seconds. This represents a computational efficiency gain of approximately \({10}^{4}\), albeit with a trade-off of a 10% reduction in prediction accuracy. The overall procedure to develop a DNN-based time-dependent reliability analysis is summarized in Fig. 5.

Flowchart of the proposed DNN-based time-dependent reliability analysis framework.
Numerical investigations
Ablation study of DNN models
To assess the effectiveness of the proposed architecture, particularly the contribution of the CNN component, an ablation study is conducted. Specifically, we develop alternative DNN models by removing the CNN layers and retaining only the ANN components, i.e., ANN1 and ANN2 illustrated in Fig. 3. In these simplified models, the input to ANN1 includes a flattened version of the cross-sectional image, instead of a structured image input processed by CNN layers. Thus, whereas the input size of ANN1 of the original DNN architecture utilized an 8 × 1 input vector, that of the modified DNNs in this ablation study utilize a 349 × 1 input vector (\(=11\times 31+8\)). The performance of the modified DNN models is summarized in Table 9, which uses the same metrics used in Table 8.
These results, obtained under the same training environment and hyperparameters used in Sect. "DNN Model for Predicting Hysteretic Parameters", indicate that removing the CNN component slightly decreases the model’s predictive performance. In particular, the relative error increases by approximately 0.4% compared to the original model with CNN integration. Moreover, achieving convergence with the modified DNNs required approximately 1,890 training epochs, which is nearly twice as many as those needed for the CNN-augmented model. These findings highlight that CNN layers not only enhance prediction accuracy but also improve training efficiency by enabling faster convergence. Furthermore, the inclusion of the CNN architecture allows the model to more effectively process complex image-based inputs.
Random variables and limit states
The proposed DNN-based framework is applied to evaluate the time-dependent reliability of the Hwayang-Jobal Bridge over its service life. The analysis incorporates random variables that account for uncertainties in corrosive environments and bridge geometry. The statistical distributions of these variables used in the analysis are summarized in Table 10. These distributions are derived from relevant literature and structural safety guidelines. Variables such as \(C_{cr}\) and \(i_{corr}\) represent the corrosive environment categories defined in Table 5. In this study, material properties of concrete and steel are treated as deterministic variables based on the structural calculation report. The random variable \(R{V}_{\eta }\) represents the pit configuration factor, which governs the geometric characteristics of corrosion pits used in the deterioration model. Based on Eq. (9) and Table 7, \(R{V}_{\eta }\) is sampled differently for each corrosive category (A–D), reflecting distinct pit shape and depth distributions.
The reliability evaluation considers the positive and negative flexural strength about the y-axis (\({M}_{y}\)) of the PSC box girders under corrosion. Traffic loads are modeled in accordance with the Korean Highway Bridge Design Code40, and are imposed across the bridge. Structural resistance (\(R\left( {{\mathbf{X}},t} \right)\)) is defined as the flexural strength of the girder incorporating strand deterioration, while demand (\(S\left( {{\mathbf{X}},t} \right)\)) is defined as the applied bending moment due to dead and traffic loads. For the live load, we apply a multi-lane reduction factor of 0.9. Since it has been demonstrated that the structural system adequately captures behavior within the linear range, the limit-state is defined as the structural demand exceeds the yield strength.
This study focuses exclusively on the flexural strength limit state, which governs the structural performance of corroded PSC girders under vertical loading in the selected bridge system9. Other limit states such as shear failure, serviceability requirements, and global instability are considered non-critical in this context and are left for future investigation. Moreover, while the current study focuses on evaluating the reliability performance of the bridge structure under vertical loads, the proposed framework is not limited to this application,it can also be extended to assess structural reliability under lateral loads, such as those induced by seismic events and wind actions.
Results and discussions
Time-point analysis of capacity and demand
To perform the time-dependent reliability analysis, the 120-year service life is discretized into 10-year intervals. MCS with 20,000 samples per interval is conducted, ensuring a coefficient of variation (c.o.v) of 7% at a probability level of 0.01. The DNN models are employed to predict structural capacities, while the demands are evaluated using the updated bridge model that integrates the predicted structural capacities with the imposed traffic loads. The computational costs of estimating structural capacity using the proposed DNN-based surrogate and the conventional numerical analysis are summarized in Table 11. As shown in the table, the DNN-based approach achieves a dramatic reduction in computation time compared to OpenSees.
Figures 6 and 7 present the median and interquartile ranges (25th to 75 percentiles) of structural capacities and demands for positive and negative moments, respectively, at the selected time points (\(t=0, 50, 100\)) along the bridge girder. In other words, \(t\) in Eq. (1) is fixed to given time points. The girder indices on the x-axis of Figs. 6 and 7 correspond to those defined in Fig. 1. In these figures, the limit states are normalized by dividing the safety margin in Eq. (1) by its capacity, i.e., \(g_{i} \left( {{\mathbf{X}},t} \right)/R_{i} \left( {{\mathbf{X}},t} \right)\), to identify the most vulnerable girders under corrosion-induced strand deterioration for positive and negative moments. The failure threshold is indicated by the dashed line in the third row of each figure.

Median and interquartile ranges for positive moments across the bridge girders (indexed in Fig. 1) at different time points \(t=0, 50, 100\): (a) flexural capacity, (b) demand, and (c) normalized limit state. The dashed line in (c) denotes the failure threshold.

Median and interquartile ranges for negative moments across the bridge girders (indexed in Fig. 1) at different time points \(t=0, 50, 100\): (a) flexural capacity, (b) demand, and (c) normalized limit state. The dashed line in (c) denotes the failure threshold.
Figures 6 and 7 show that structural capacities \({R}_{i}\left(\mathbf{X},t\right)\) decrease over time due to corrosion in both positive and negative moment cases. In addition, negative moments exhibit greater variability compared to positive moments. Regarding the critical girder, girders near midspan (Index 6) are identified as critical for positive moments at the given time points, while end girders (Indices 13 and 14) are the most vulnerable for negative moments. Among these critical girders, negative moments approach to the failure threshold in the later stages of the bridge’s service life (e.g., \(t=100\)), indicating a higher likelihood of failure compared to positive moments as the structure ages.
Instantaneous and first-passage limit states over time
Figures 8 and 9 illustrate the variation in capacities, demands, and limit states over time for the most critical girders (Index 6 for positive moments, and Indices 13 and 14 for negative moments). Hereafter, girders identified by their index (e.g., Index 6) will be referred to as Girder 6. Although Girder 6 is identified as the most critical under positive moment conditions, it exhibits minimal variation over time, suggesting that its structural integrity remains largely unaffected by deterioration. This indicates that the girder remains structurally robust against corrosion when subjected to positive rotation about the y-axis. In contrast, for negative moments, Girders 13 and 14 show a significant likelihood of exceeding the failure threshold after 50 years, highlighting the more severe impact of corrosion on these girders.

Capacity, demand, and limit state across time for Girder 6 (positive moments).

Capacities, demands, and limit states across time for Girder 13 and Girder 14 (negative moments).
Figures 10 and 11 present the instantaneous and first-passage limit states over time for these critical girders. The instantaneous limit states presented in Figs. 10 and 11 correspond to the results shown in the third rows of Figs. 8 and 9, respectively. Although corrosion induces a monotonic reduction in capacity, the instantaneous limit states do not decrease monotonically. This is attributed to load redistribution effects across the bridge deck, captured by the updated model with strand deterioration. For example, in the case of negative moments, as the stiffness of Girder 13 decreases due to corrosion, adjacent girders, such as Girder 12, compensate by bearing a greater proportion of the applied loads. This redistribution mechanism alters the load demands on each girder, delaying failure in some components while potentially accelerating it in others.

Instantaneous and first-passage limit states across time for Girder 6 (positive moments). The instantaneous limit state represents the safety margin evaluated at each time point, while the first-passage limit state reflects the minimum safety margin encountered over time.

Instantaneous and first-passage limit states across time for (a) Girder 13 and (b) Girder 14 (negative moments). The instantaneous limit state represents the safety margin evaluated at each time point, while the first-passage limit state reflects the minimum safety margin encountered over time.
The first-passage limit states stabilize after approximately 60 years, reflecting two distinct phases of reliability performance. During the early phase (\(t\le\) 60 years), failure rates accelerate as the strand deterioration significantly reduces the structural capacities of critical girders. In the later phase (\(t>\) 60 years), the system adapts through load redistribution, leading to a slower reduction in reliability and a plateau in failure rates. This temporal behavior emphasizes the importance of early maintenance interventions to mitigate rapid deterioration and support long-term structural reliability.
Moreover, instantaneous and first-passage limit states differ significantly in their interpretations. Instantaneous limit states provide a snapshot of the structure’s performance at a specific time, capturing the immediate effects of corrosion and load redistribution. In contrast, first-passage limit states offer a cumulative perspective, incorporating the aggregated probability of failure over the service life. For instance, while the instantaneous limit states for Girder 13 and Girder 14 stabilize or slightly improve after 60 years, their first-passage limit states continue to decline. This divergence arises because the first-passage limit states account for the accumulated likelihood of failure across all prior intervals, a consideration absent in the instantaneous limit states.
Time-dependent reliability across the service life
As illustrated in Figs. 6, 7, 8, 9, 10 and 11, significant drops in reliability are observed only in a few critical girders, while the reliability of most elements remains relatively stable. In practical bridge engineering, uncertainties such as incomplete inspections, undetected spalling, and simplified material modeling may lead to conservative adjustments of nominal capacity. To account for such effects, design codes often adopt safety factors to represent reduced effective capacities. Motivated by this concept, we introduce a capacity reduction factor (\(\phi\)) in the following analysis as a simplified means to explore the influence of such uncertainties on long-term reliability. A new limit state function is defined by modifying Eq. (1) as follows:
where \(\phi R\left( {{\mathbf{X}},t} \right)\) represents the factored capacity.
Figure 12 illustrates the failure probabilities and reliability indices calculated using Eq. (14) for different capacity reduction factors (\(\phi = 1.0, 0.75, 0.5\)). For visualization purposes, reliability indices exceeding 4.0 (\(\beta > 4.0\)) are truncated at 4.0 to simplify graphical representation. This truncation aligns with the typical threshold specified in the Korean Highway Bridge Design Code40, which recommends reliability indices of 3.5 to 4.0 for bridge components under standard loading conditions. The results for \(\phi = 1.0\) correspond to those discussed in Sects. “Time-point analysis of capacity and demand” and “Instantaneous and first-passage limit states over time”, reflecting the unmodified capacity. The capacity-reduction factors \(\phi = 0.75\) and \(0.5\) represent conservative bounds on structural capacity to account for uncertainties in inspection accuracy, unmodeled damage (e.g., spalling), and partial observability of strand deterioration. These values are analogous to partial safety factors in design codes (e.g., AASHTO LRFD, MOLIT) and are used here to explore maintenance-sensitive reliability scenarios.

Failure probabilities and reliability indices across time for different capacity factors: (a) \(\phi =1.0\), (b) \(\phi =0.75\), and (c) \(\phi =0.5\).
Reliability indices are derived based on the minimum values of the first-passage limit states for positive and negative moment cases, capturing failures under either condition. In the early service life, reliability indices exceed the thresholds recommended by MOLIT40 This outcome is attributed to the application of only dead and live loads to the structure. However, note that these results are specific to the analyzed load combinations; incorporating additional extreme hazard scenarios or complex loading conditions could yield different reliability metrics.
The results indicate that strand corrosion impacts negative moments more severely than positive moments, with initial failures typically observed at the end girder (Girder 14). Since we use MCS with 20,000 samples per interval for calculating the failure probability and reliability index, the number of failed scenarios can be counted. For \(\phi = 1.0\), Girder 14 only shows failed scenarios within 120 years, with failure initiation occurring after 40 years. For \(\phi = 0.5\), four girders (Girders 6, 7, 13, and 14) show failed scenarios within 120 years. Failure probabilities increase rapidly during the first 60 years, followed by a stabilization phase. This stabilization occurs because, as corrosion-induced stiffness reductions progress, the load redistribution across the bridge deck allows non-critical girders to bear more load, thereby slowing the rate of capacity degradation in critical girders. For instance, as Girders 13 and 14 experience reduced stiffness, adjacent girders compensate, leading to a dynamic equilibrium in load-bearing responsibilities. These results align with the first-passage limit-state behaviors shown in Figs. 10 and 11.
The results in Fig. 12 emphasize the importance of prioritizing maintenance efforts for vulnerable girders (e.g., Girders 13 and 14) during the first 60 years to optimize system reliability and prevent progressive failures. Proactive retrofitting during this period can mitigate the effects of accelerated deterioration and extend the bridge’s service life. However, due to load redistribution, retrofitting a single element can impact the reliability of adjacent elements. Ongoing research focuses on updating reliability assessments under various retrofit strategies, including the determination of optimal locations and timing for retrofitting. Furthermore, the integration of a Bayesian neural network framework41 supports the incorporation of model uncertainty and enables analysis of its influence on the resulting reliability indices.
From a practical standpoint, the reliability indices obtained through the proposed framework can support decision-making for inspection and retrofit planning. For example, girders whose indices approach the code-recommended threshold (\(\beta \approx 3.5\)) should be prioritized for closer inspection, while members exhibiting accelerated reductions in reliability (such as end girders under negative moments) may warrant earlier retrofit interventions. This interpretation links the reliability analysis to actionable maintenance strategies, ensuring that assessment results can be directly used to optimize inspection intervals and retrofit timing.
To quantify the overall computational efficiency, we compare the total runtime required to perform the full time-dependent reliability analysis. For a total of 260,000 simulations (i.e., 20,000 samples over 120 years), the OpenSees-based finite element model requires approximately 58.4 h, whereas the proposed DNN-based surrogate completes the same analysis in just 21 s, achieving a speed-up of approximately \({10}^{4}\) in computational cost. This substantial gain highlights the practical feasibility of using deep learning-based surrogates for large-scale structural reliability assessments.
To assess the impact of time discretization, a convergence study is conducted using \(\Delta t=5\) years for Girders 13 and 14. Table 12 compares reliability indices \({\beta }^{*}\left(t\right)\) at selected time points for \(\Delta t=10\) and \(5\) years with \(\phi =0.75\). The difference remains within 5%, indicating that the 10-year interval provides a reasonable balance between computational efficiency and accuracy for long-term assessments.
The aforementioned investigations demonstrate that incorporating DNN models into time-dependent reliability analysis not only facilitates the evaluation of the bridge system’s performance over time but also supports informed decision-making for maintenance planning. By offering a comprehensive yet computationally efficient method, this framework enables informed decision-making for extending the service life of critical infrastructure.
Conclusions
This study proposed a deep learning-based framework to address the challenges of evaluating the time-dependent reliability of cable-stayed bridges with prestressed concrete (PSC) box girders subjected to corrosion-induced deterioration. To this end, a finite element model of the Hwayang-Jobal Bridge was constructed using OpenSees and commercial software. Subsequently, deep neural network (DNN) models were developed to predict the structural characteristics of various girders under different deterioration scenarios. The predicted structural characteristics were integrated into the numerical model of the cable-stayed bridge to update structural parameters in response to deterioration. This integration enables the framework to efficiently capture the complex interactions of material degradation, uncertainties in environmental factors, and structural load redistribution. Several numerical investigations were conducted to validate the proposed DNN-based framework for time-dependent reliability analysis. The results highlight the importance of understanding system-level behaviors, including load redistribution among girders, to accurately assess the reliability of aging bridges. Additionally, the findings reveal that negative moments predominantly affect girders located near the outermost sections of the bridge system (e.g., Girders 13 and 14 in Fig. 1). These insights support the development of proactive maintenance plans and retrofitting strategies to enhance system reliability and prevent cascading failures. The framework is readily extendable to other PSC box girder bridges with similar geometry, and the trained surrogate can be reused or fine-tuned for new structures. This modularity supports practical deployment for time-efficient reliability assessments and real-time decision support. In addition, the proposed framework has been designed to be readily updated and validated when inspection or field monitoring data become available in the future, ensuring its continued reliability and practical applicability. Moreover, the reliability indices derived from the proposed framework can be directly interpreted to guide practical maintenance actions, such as determining inspection intervals and prioritizing retrofit timing for critical girders.
Four distinct directions for future research have been identified. First, efforts are focused on optimizing retrofit strategies and extending the applicability of this framework to other bridge types and additional time-dependent factors such as traffic growth, seismic loads, and concrete creep. Furthermore, the framework can be adapted to account for other deterioration mechanisms, including spalling, carbonation, and fatigue, by modifying the corresponding deterioration models and redefining the associated limit state functions. In this way, the proposed framework retains its generality while allowing for case-specific adjustments depending on the deterioration process considered. Second, the concept of resilience is incorporated to account for not only structural integrity but also the recovery of the system following degradation or failure42,43. This approach facilitates a more comprehensive understanding of the holistic behavior of structural systems in the face of aging and environmental challenges. Third, the proposed framework could be extended to incorporate field inspection data or real-time sensor measurements. For example, Bayesian updating of reliability indices or periodic retraining of the DNN models with new observations may offer a pathway toward adaptive reliability assessment over time, which represents a promising direction for future work aimed at supporting maintenance planning. Fourth, the general architecture of the proposed framework is adaptable to other bridge types and structural modeling approaches, provided that appropriate modifications are made to the finite element model and the definition of input features for the DNN models.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Adam, J. M., Parisi, F., Sagaseta, J. & Lu, X. Research and practice on progressive collapse and robustness of building structures in the 21st century. Eng. Struct. 173, 122–149 (2018).
Biezma, M. V. & Schanack, F. Collapse of steel bridges. J. Perform. Constr. Facil. 21(5), 398–405 (2007).
Deng, L., Yan, W. & Nie, L. A simple corrosion fatigue design method for bridges considering the coupled corrosion-overloading effect. Eng. Struct. 178, 309–317 (2019).
Lee, S. H., An, L. S. & Kim, H. K. Risk-based bridge life cycle cost and environmental impact assessment considering climate change effects. Sci. Rep. 15(1), 725 (2025).
SMFMC (Seoul Metropolitan Facilities Management Corporation). (2017). Synthesis report: Academic service contract related with maintenance of PSC box girder bridges in Seoul jurisdiction.
Kim, J. & Song, J. Bayesian updating methodology for probabilistic model of bridge traffic loads using in-service data of traffic environment. Struct. Infrastruct. Eng. 19(1), 77–92 (2022).
Yoo, C. H., Chul Park, Y. & Kim, H. K. Modeling corrosion progress of steel wires in external tendons. J. Bridg. Eng. 23(12), 04018098 (2018).
Biswas, R. K., Iwanami, M., Chijiwa, N., Saito, T. & Malaga-Chuquitaype, C. A simplified approach to evaluate cyclic response and seismic fragility of corrosion damaged RC bridge piers. Dev. Built Environ. 12, 100083 (2022).
Kim, J. & Song, J. Time-dependent reliability assessment and updating of post-tensioned concrete box girder bridges considering traffic environment and corrosion. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civil Eng. 7(4), 04021062 (2021).
Megahed, K. Prediction and reliability analysis of shear strength of RC deep beams. Sci. Rep. 14(1), 14590 (2024).
Tu, B., Dong, Y. & Fang, Z. Time-dependent reliability and redundancy of corroded prestressed concrete bridges at material, component, and system levels. J. Bridg. Eng. 24(9), 04019085 (2019).
Xu, G. & Azhari, F. Predicting the remaining useful life of corroding bridge girders using Bayesian updating. J. Perform. Constr. Facil. 35(5), 04021055 (2021).
Pugliese, F., De Risi, R. & Di Sarno, L. Reliability assessment of existing RC bridges with spatially-variable pitting corrosion subjected to increasing traffic demand. Reliab. Eng. Syst. Saf. 218, 108137 (2022).
Huang, T., Wan, C., Liu, T. & Miao, C. Degradation law of bond strength of reinforced concrete with corrosion-induced cracks and machine learning prediction model. J. Build. Eng. 98, 111022 (2024).
Straub, D., Schneider, R., Bismut, E. & Kim, H. J. Reliability analysis of deteriorating structural systems. Struct. Saf. 82, 101877 (2020).
Lei, X., Sun, Z., Wang, A., Guo, T. & Nagayama, T. Estimation of bridge girder cumulative displacement for component operational warning using Bayesian neural networks. Struct. Control. Health Monit. 2025(1), 9974584 (2025).
Lei, X., Guo, H., Dong, Y., & Bastidas-Arteaga, E. Life-cycle performance prediction and interpretation for coastal and marine prestressed concrete beams using active learning-enhanced Bayesian neural networks. Reliab. Eng. Syst. Saf. 111557 (2025b).
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z., Citro, C., and Zheng, X. (2016). Tensorflow: Large-scale machine learning on heterogeneous distributed systems. arXiv preprint arXiv:1603.04467.
Andrieu-Renaud, C., Sudret, B. & Lemaire, M. The PHI2 method: A way to compute time-variant reliability. Reliab. Eng. Syst. Saf. 84(1), 75–86 (2004).
Wang, Z. & Wang, P. A nested extreme response surface approach for time-dependent reliability-based design optimization. J. Mech. Des. 134(12), 121007 (2012).
Kim, J., Yi, S. R. & Song, J. Active learning-based optimization of structures under stochastic excitations with first-passage probability constraints. Eng. Struct. 307, 117873 (2024).
Kim, J., Yi, S. R. & Song, J. Estimation of first-passage probability under stochastic wind excitations by active-learning-based heteroscedastic Gaussian process. Struct. Saf. 100, 102268 (2023).
Suksuwan, A. & Spence, S. M. Efficient approach to system-level reliability-based design optimization of large-scale uncertain and dynamic wind-excited systems. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civil Eng. 4(2), 04018013 (2018).
Boole, G. An Investigation of the Laws of Thought: on Which are Founded the Mathematical Theories of Logic and Probabilities Vol. 2 (Walton and Maberly, 1854).
Song, J., Kang, W. H., Lee, Y. J. & Chun, J. Structural system reliability: Overview of theories and applications to optimization. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civil Eng. 7(2), 03121001 (2021).
McKenna, F. OpenSees: A framework for earthquake engineering simulation. Comput. Sci. Eng. 13(4), 58–66 (2011).
Ernst, H. Der E-modul von seilen unter bercksichtigung des durchhanges. Bauing. 40(2), 52–55 (1965) (in German).
Kim, T., Kwon, O. S. & Song, J. Seismic performance of a long-span cable-stayed bridge under spatially varying bidirectional Spectrum-compatible ground motions. J. Struct. Eng. 147(4), 04021015 (2021).
Li, F., Yuan, Y. & Li, C. Q. Corrosion propagation of prestressing steel strands in concrete subject to chloride attack. Constr. Build. Mater. 25(10), 3878–3885 (2011).
Val, D. V. & Melchers, R. E. Reliability of deteriorating RC slab bridges. J. Struct. Eng. 123(12), 1638–1644 (1997).
Estes, A. C. & Frangopol, D. M. Repair optimization of highway bridges using system reliability approach. J. Struct. Eng. 125(7), 766–775 (1999).
Thoft-Christensen, P. Assessment of the reliability profiles for concrete bridges. Eng. Struct. 20(11), 1004–1009 (1998).
Jeon, C. H., Lee, J. B., Lon, S. & Shim, C. S. Equivalent material model of corroded prestressing steel strand. J. Market. Res. 8(2), 2450–2460 (2019).
Jeon, C. H., Sim, C. & Shim, C. S. The effect of wire rupture on flexural behavior of 45-year-old post-tensioned concrete bridge girders. Eng. Struct. 245, 112842 (2021).
KISTEC (Korea Infrastructure Safety and Technology Corporation). Safety inspection and safety diagnosis detailed guideline. Jinju, South Korea: KISTEC (2019).
Song, H. W. & Saraswathy, V. Corrosion monitoring of reinforced concrete structures—A review. Int. J. Electrochem. Sci. 2(1), 1–28 (2007).
Kim, T., Kwon, O. S. & Song, J. Response prediction of nonlinear hysteretic systems by deep neural networks. Neural Netw. 111, 1–10 (2019).
El Maaddawy, T. & Soudki, K. A model for prediction of time from corrosion initiation to corrosion cracking. Cement Concr. Compos. 29(3), 168–175 (2007).
ASCE/SEI 41–17. Seismic evaluation and retrofit of existing buildings (ASCE/SEI 41–17). American Society of Civil Engineers (2017).
MOLIT (Ministry of Land, Infrastructure, and Transport). (2015). Korea highway bridge design code (LRFD): Cable bridges. Sejong, South Korea: MOLIT
Kim, T., Song, J. & Kwon, O. S. Probabilistic evaluation of seismic responses using deep learning method. Struct. Saf. 84, 101913 (2020).
Yi, S. R. & Kim, T. System-reliability-based disaster resilience analysis for structures considering aleatory uncertainties in external loads. Earthquake Eng. Struct. Dynam. 52(15), 4939–4963 (2023).
Yi, S. R., & Kim, T. Defining recoverability from system-reliability-based disaster resilience analysis perspective. Int. J. Disaster Risk Reduct. 105862 (2025).
Funding
This research was supported by Developing digital safety measurement to enhance the availability of smart structural monitoring of facilities funded by Korea Research Institute of Standards and Science (KRISS—2025—GP2025—0009). The second author is also supported by the Basic Science Research Program through the National Research Foundation of Korea funded by the Ministry of Education (RS-2024–00407901). These supports are gratefully acknowledged.
Author information
Authors and Affiliations
Contributions
All authors contributed to the conception and design of the study. Material preparation, data collection, and analysis were performed by Jihwan Kim, Jungho Kim, and Taeyong Kim. Jihwan Kim and Jungho Kim wrote the first draft of the manuscript, and Taeyong Kim revised it. Taeyong Kim supervised the project. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Kim, J., Kim, J. & Kim, T. Deep learning-based framework for time-dependent reliability analysis of a cable-stayed bridge with corroded PSC box girders under gravity loads. Sci Rep 15, 42448 (2025). https://doi.org/10.1038/s41598-025-26472-5
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-26472-5
