
Abstract
The noise, vibration and harshness(NVH) feature is attracting more and more attentions due to its effects on durability, comfort and compliance with noise regulations. The thin-walled components play an important role in NVH of an engine. In this paper, a computational fluid dynamics (CFD) and finite element multi-body analysis blending method is proposed to analyze the dynamic characteristics of oil pan and the hydrodynamic/structural factors affecting camshaft speed fluctuations. With CFD approach, the oil-air two-phase flows in plastic oil pan on different time scales are simulated, and the evolution processes of oil in an oil-air two-phase system with gravitational load are depicted. By coupling the fluid viscosity effect and multi-body interactions of solid contacting surfaces, the NVH performance is well demonstrated. Numerical results show that plastic oil pan has 31.20% ~ 42.04% increase in modal frequency and 2.9 ~ 7.2 dB reduction in sound power level compared to metal oil pan. Comparison results validate present method in simulations of elastohydrodynamics in automotive engineering and provide the key factors of NVH performance for modern diesel engine design.
Similar content being viewed by others
Introduction
In power engineering and automotive manufacturing industry, the techniques ought to satisfy dimensional tolerance, surface finish and porosity control. As a result, the engine includes several thin-walled parts including cylinder head cover, timing cover and oil pan. However, the shortcomings of thin-walled structures, such as low stiffness, bucking susceptibility, weld distortion, limited material choices and acoustic radiation, make them the main source of surface vibration and noise radiation of the engine. Specially, the vibrations and noise radiation become much more significant at idling and low-speed driving1. Typically, the oil pan is a large and thin-walled structure. Among all vibration-sensitive parts, its local vibration response is the most significant in the case of low modal frequency. Consequently, it accounts for a dominant proportion of the noise of the whole machinery and becomes main factor of noise radiation, which is attracting more and more attention from powertrain engineers and automotive designers.
As the engine is idling, vibration occurs and creates sound waves, which usually become harmful noise. The noise will radiate through oil pan, affect the sound quality of the vehicle and result in disturbance. On the other side, to improve energy utilization efficiency and acceleration efficiency, lightweight has become a critical criterion in design of automobile and the parts of it2. However, it is more difficult to invent a lighter oil pan via structural optimization than adoption of new materials. Once upon a time, the usual choice is aluminum alloy. With current technology, it is found that one ton of metal and aluminum alloy has to be produced at a cost of emission of carbon dioxide larger than production of one ton of plastic material. Considering the increasing environmental concern of greenhouse effect, more and more suggestions are proposed to replace aluminum alloy with plastics. In this paper, the performance of plastics will be evaluated and compared to metal in an idling case. To comprehensively evaluate the vibrational and acoustic performance of the engine, a noise-vibration-harshness(NVH) principle of estimation of engine performance is proposed. In civil applications, NVH criterion is applied to control and reduce noise, suppress vibration to provide a comfortable experience3. To extend service life of equipment, it is necessary to avoid the negative effects of vibrations and harshness on thin-walled parts. Fortunately, the main causes of vibrations are found that rotating components in the engine and variations of vehicle on the road are two primary contributions to vibrations4. So, the strategies for detecting and suppressing noise and vibration in automotive engine have been being studied by experimental approaches or industrial experience5. The vibration and noise source identification methods are also proposed to reduce the negative effects6. Due to the complexity of factors that influence the NVH performance, a series of researches based on objective parameters are constructed for better description of its mechanism7,8,9. However, the dynamic properties of oil pan in idling are still not well demonstrated. The mechanism of a motioning oil pan in a fluidic environment and interaction with other equipment via structural responses is still not revealed with clear physical representation. To give an insight into mechanical details of the NVH performance of oil pan in operating condition, the efficient blended model including hydrodynamic and structural dynamic information needs to be developed.
In this paper, the elastohydrodynamic phenomenon of plastic oil pan and its mechanism are studied. Therefore, Elastohydrodynamic Lubrication (EHL) which combines elastic deformation and lubrication effect is analyzed. The mechanism of hydrodynamic film formation is enhanced by surface elastic deformation and increase of lubricant viscosity10,11,12,13,14,15,16,17,18,19,20,21,22. The current work is focused on analysis of NVH performance dominated by elastohydrodynamic function of oil pan with a mixed mechanism of hydrodynamic lubrication and structural dynamics. In this field, there are several computational fluid dynamics/finite element method (CFD-FEM) coupling approaches. Paik et al. analyzed structural loads on surface ship by one-way and two-way CFD-FEM coupling approaches23. Maki et al. utilized CFD and dynamic FEM to simulate the fluid and structural physics domains respectively for analysis of hydroelastic impact24. Yang et al. proposed a CFD-FEM method which can describe six degrees of freedom of rigid-body in fluid flows25. Dhavalikar et al. proposed CFD-FEM based on StarCCM + + for whipping response analysis26. McVicar et al. proposed a one-way CFD-FEM method for simulation of slam-induced bending27. Lakshmynarayanana et al. coupled CFD and FEM to analyze effects of head waves on flexible barge28. Jiao et al. proposed a CFD-FEM two-way coupling method and predicted ship wave loads29. Sun et al. used CFD-FEM method to simulate hydroelastic response of container ship30. Chu et al. studied distributions of tensions during hydroelastic responses of floating raft31. Kampitsis et al. investigated offshore wind turbine and proposed strategies of compression of vibration using FEM-CFD approach32. Jiao et al. proposed a two-way coupled Reynolds-Averaged Navier–Stokes(NS)/FEM (RANS/FEM) method33. Huang et al. coupled free surface volume of fraction(VOF) flow solver and FEM to simulate hydroelastic responses due to freak waves34. Duan et al. studied the collapse characteristics of the hull structures of a ship in harsh wave conditions35. In current work, the flow is described by macroscopic NS equation, which is solved via semi-implicit pressure-correlated method. A multi-body powertrain system is modeled in which the oil pan is analyzed by finite element modal analysis method. In this way, the real states of engine are preserved and EHL characteristics at idling are revealed. To improve mesh resolution of critical region, reduce the number of mesh cells and extend present method to arbitrary geometries of machinery parts, unstructured mesh is adopted36,37,38,39. The vibration response and sound power level of plastic oil pan of the engine powertrain at idling are illustrated by numerical results and compared to metal oil pan. Comparisons will provide a physical explanation of advantages of plastics in NVH performance of thin-walled parts and validation of present numerical method.
The rest of the paper is organized as follows: Sect. 2 describes the numerical methods for description of elastohydrodynamic mechanism of an oil pan at idling; Sect. 3 presents the numerical results and related discussions; The conclusion is summarized and discussed in Sect. 4.
CFD/multi-body dynamics analysis approach
Semi-implicit pressure-correlated algorithm
In this session, a pressure-correlated method is presented. For simplification and efficiency of computation, it is started with incompressible form of NS equation, which will be correlated later to model compressible effect. The incompressible NS equation reads.
in which \({\mathbf{U}}_{\alpha }\) is flow velocity vector of a specific phase,\(\nu\) is fluid kinematic viscosity coefficient without implementation of turbulence model, \({\mathbf{g}}\) is gravitational acceleration, \(p\) is pressure. The viscosity and pressure together reflect different scales of flow40,41.
In oil-air two-phase system, the effect of interface between air and oil are modeled by continuum surface force.
in which \(\alpha\) denotes volume fraction, \({\mathbf{n}}_{f}\) represents unit normal vector of interface, \(\sigma\) is surface tension coefficient. Volume fraction follows advection equation below42,43.
in which \(t\) is physical evolution time. In computation, Eq. (3) is solved to obtain volume fractions of air and oil, which are substituted into Eq. (2) to calculate surface force included into the force term of momentum equation in Eq. (1). Additionally, the compressible effect should be included via following stages. Equation (1) includes equation for mass and momentum respectively. First, the equation for momentum can be rewritten in matrix form.
Matrix \({\mathbf{M}}\) includes coefficients resulted from discretization of the left hand side of equation for momentum in Eq. (1), so Eq. (4) is a semi-discretization equation. Matrix \({\mathbf{M}}\) can be split into diagonal and off-diagonal, so Eq. (4) is modified as.
where \({\mathbf{A}}\) is diagonal part of Matrix \({\mathbf{M}}\). Thus, the equation for flow velocity can be reorganized as.
In Eq. (6), pressure term is ought to be correlated for inclusion of compressible effect. To extend Eq. (1) to compressible flows, the projection technique is adopted44. An equation for description of time evolution of pressure is derived since divergence-free constraint is absent. A general equation of state is written as.
in which \(W\) represents variables other than volume fraction \(\alpha\), flow velocity of a specific phase \({\mathbf{U}}_{\alpha }\) and density \(\rho\). Equation (7) can be integrated to derive a material derivative form, which is written as.
Since Eq. (8) contains time derivatives of several flow variables which appear in Eq. (1), Eq. (1) can be substituted into Eq. (8). After expansion of material derivative of pressure and grouping right hand side of Eq. (8), with the assumption of sound speed \(c = \sqrt {{{\partial p} \mathord{\left/ {\vphantom {{\partial p} {\partial \rho }}} \right. \kern-0pt} {\partial \rho }}}\) and unchanged fluid kinematic viscosity coefficient due to stable property of oil, the evolution of pressure is written as.
According to theory in ref45, time derivative of pressure can be written as
which includes advective pressure and corresponding pressure increments. The advective pressure is expressed by corresponding advection equation read.
Finally, the pressure-correlated scheme is written as.
The steps of semi-implicit pressure-correlated algorithm are as below:
-
The equation for momentum in Eq. (1) is solved to obtain a velocity \({\mathbf{U}}_{\alpha }\) which does not strictly satisfy continuity constraint;
-
The pressure-correlated processes are implemented to obtain pressure field;
-
The velocity \({\mathbf{U}}_{\alpha }\) is correlated via pressure field to satisfy continuity constraint, which recovers the compressible effects.
The above steps will repeat with 10 ~ 20 times within a physical time step for correlation of pressure in unsteady flow. After flow information on next time step is predicted, sharp interfaces between oil and air are captured via artificial convective strategy. As Eq. (3) is being solved, it is modified as.
in which \({\mathbf{U}}\) denotes mixture velocity. The term \(\nabla \cdot \left( {\alpha {\mathbf{U}}_{\alpha } } \right) - \nabla \cdot \left( {\alpha {\mathbf{U}}} \right)\) reflects convection due to phase flow heterogeneity46, so Eq. (13) can be rewritten as.
where \(C_{\alpha }\) is compression factor. To determine a solution of partial differential equation, boundary condition is imposed as constraint. On a solid boundary, flows keep no-slip on the wall and no mass penetrates the wall. To numerically construct this effect, the ghost cells are adopted. It is assumed that the velocities in the ghost cells are reversed from the velocities inside the computational domain and the mass in the ghost cells should be symmetric around the boundary, so.
The relation between cell and ghost cell is shown in Fig. 1.

Boundary condition.
Modal analysis theory
In current work, the vibrations of oil pan are analyzed with modal analysis. In structure dynamics, modal analysis is the basis of simulation of frequency, damping and systematic response47. It is also generally used in engineering vibration analysis to study the dynamic characteristics of a structure. Firstly, the free vibration equation of the system reads.
in which \(\left[ L \right]\) and \(\left[ K \right]\) are mass matrix and stiffness matrix, \(\left\{ {\ddot{\delta }} \right\}\) and \(\left\{ \delta \right\}\) are nodal acceleration vector and nodal displacements in a structure. Equation (16) is based on following presumptions:
-
A structure, which has finite number of degrees of freedom, is being considered;
-
In working condition, the deformation of structure is rather small, so nonlinear effect can be neglected and system can be linearized;
-
Under design condition, the structure of an engine must remain stable. Therefore, time-varing forces and alternating boundary conditions are not taken into consideration.
The form of solution of Eq. (16) reads.
where subscript n denotes a specific state, \(\omega\) is angular frequency, Eq. (17) can be substituted into Eq. (16), which results in.
Condition for the existence of solution to the Eq. (18) is.
For a specific order of \(\left[ L \right]\) and \(\left[ K \right]\), Eq. (19) has the same number of eigenvalues which can be substituted into Eq. (18) to obtain eigenvectors. Every eigenvalue and eigenvector represent a specific vibration mode, which will be shown in numerical results in this work.
Equation (18) can be modified as.
The analysis of structural dynamics is aimed to obtain vibration mode, sound power level and NVH properties of oil pan, so it is an eigenvalue problem. Equation (20) can be rewritten as.
Equation (21) is solved by Subspace Iteration Method (SIM)48. Firstly, a stochastic quantum space which has the same dimension as the number of eigenvalues is defined. The initial stochastic quantum space vector can be decided with initial condition of bolt preload on oil pan. Hereinafter, an iteration scheme for solving stochastic quantum space vector is constructed as.
in which \({\mathbf{Q}}\) is stochastic quantum space vector, \(k\) represents iteration step. Then, stochastic quantum space vector is orthogonalized,
where \({\mathbf{R}}\) is an upper triangular matrix. Now, \({\tilde{\mathbf{Q}}}\) has become orthogonal matrix. Thereby mass matrix \(\left[ L \right]\) and stiffness matrix \(\left[ K \right]\) can be projected as.
Finally, the equation for eigenvalue is written as.
in which \(\left\{ \Lambda \right\}_{k + 1}\) denotes eigenvalues at current iteration step. The eigenvectors can also be updated at current iteration step.
Results
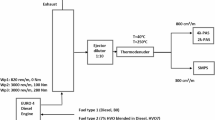
In this section, the NVH performance of oil pan is analyzed based on a whole machinery system to reflect the fluid viscous effects on NVH performance and structural dynamical properties of oil pan. For efficiency, the systematic work is carried out using AVL Excite PU software. In the Excite PU software, the bolted connection relationship is defined by the oil pan substructure and the body substructure. The working condition of the whole machine NVH analysis is prescribed to setting the idling at 600 r/min, which takes the explosion pressure excitation, valve system excitation of the distribution mechanism, and gear excitation into consideration. Every parts are modeled by finite element elastic bodies and linked by nonlinear connector including guidance, bearing, spring and universal joint. In this way, interactions of vibrations of every parts can be swiftly evaluated. The flow chart of this methodology is shown in Fig. 2.

Flow chart of present method.
The thin-walled part, which contributes the most portion of surface vibration and noise radiation for the engine, is studied to estimate its elastohydrodynamical features. So, the oil pan is extracted from the power system and analyzed by approach of CFD and modal analysis, which is shown in Fig. 3.

Plastic oil pan in this paper.
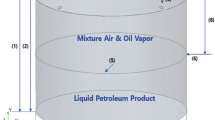
Simulation of flows in oil pan
The flow in oil pan on the working condition of an idle speed of 600 r/min with volume fraction of oil of 0.5 is simulated. Initially, the oil is reservoired within lower part of the plastic pan and the rest of space is filled with air. Under the effect of combination of gravity and acceleration force created by idling of the engine, the oil–gas surface will result in different patterns at every time steps. In this case, the density of air is \(1.225{{kg} \mathord{\left/ {\vphantom {{kg} {m^{3} }}} \right. \kern-0pt} {m^{3} }}\) and density of oil is \(818.839{{kg} \mathord{\left/ {\vphantom {{kg} {m^{3} }}} \right. \kern-0pt} {m^{3} }}\), the dynamic viscosity coefficients of air and oil are \({1}{\text{.7894}} \times {10}^{ - 5} {{kg} \mathord{\left/ {\vphantom {{kg} {m \cdot s}}} \right. \kern-0pt} {m \cdot s}}\) and \(0.00749273{{kg} \mathord{\left/ {\vphantom {{kg} {m \cdot s}}} \right. \kern-0pt} {m \cdot s}}\), respectively. The flow field is discretized by tetrahedron cells, which is shown in Fig. 4.

Unstructured mesh of flow in oil pan.
To adapt to different working conditions, the complexity of geometries has to increase. Structured hexahedral grid generations with regular topological relation always fail to go on in the case of geometric discontinuity. To extend present method to industry, unstructured tetrahedral mesh is adopted. With flexible connectivity, irregular mesh cells can be adapted to fit arbitrary scales on curvilinear and segmental boundaries. It is also rather easy to insert tetrahedron cells into any location and create new connectivity, so the regional resolution is improved but the number of cells has limited growth. In the case of oil pan, there are several parts which form rapidly varying geometrical features and highly irregular construction. In evolution of surface between oil and air, inhomogeneous distribution of gradients of variables induces anisotropic fluid behavior and notable flow scale variations. So, the resolution is a crucial factor to obtain precise numerical solution. For better resolution, numerical stability and computational efficiency, mesh cells are refined near geometrical inflection points and smoothly stretched to keep a low skewness. Mesh shown in Fig. 4 is generated with Bowyer-Watson incremental insertion algorithm49,50,51,52. The steps of mesh generation are as below:
-
1.
Points are inserted on boundaries according to rational resolution and a triangulated bounding is created;
-
2.
The initial tetrahedron mesh is generated by connecting boundary points;
-
3.
The centroid of a cell is inserted as the newly point and a cell whose circumsphere contains it will be split;
-
4.
New tetrahedrons are reconstructed with the newly added point and dangled nodes;
-
5.
The minimum angle is maximized by iterating all the cells of mesh.
Before simulation, the mesh has to be proved that its resolution is rational. So, Minimum grid cell size of \(5 \times 10^{ - 3}\),\(1 \times 10^{ - 3}\),\(5 \times 10^{ - 4}\) and \(1 \times 10^{ - 4}\) are tested and velocity profiles along line \(X = 0.07,Y = 0,Z \in \left[ { - 0.{1464566929,0}} \right]\) are extracted to carry out the mesh dependence verification, which are shown in Fig. 5.

Velocity profiles at t = 0.2 s in the cases of different mesh resolutions.
After mesh dependence verification, mesh with rational mesh resolution is chosen as shown in Fig. 4. Unstructured mesh is applied in this work and complex geometries in thin-walled parts of the engine are discretized with 1,285,123 tetrahedron cells, which extends present numerical method to curvilinear boundaries and broaden engineering applications.
The evolution process of flow field is shown in Figs. 6, 7, 8, 9, 10, 11.

Flow pattern in the oil pan (t = 0.025 s).

Flow pattern in the oil pan (t = 0.05 s).

Flow pattern in the oil pan (t = 0.1 s).

Flow pattern in the oil pan (t = 0.15 s).

Flow pattern in the oil pan (t = 0.2 s).

Flow pattern in the oil pan (t = 0.25 s).
The pressure distribution at each time step is one of direct factors of oil pan NVH performance, therefore, the finite element modal analysis can be carried out based on the results of CFD. In present simulation results, there is initially a sharp interface between oil and air. On condition of idling of the engine, flow motion is induced by acceleration but impeded by gravity. Under both effects, oil behaves as upwelling and recession. Figure 12 shows evolution process of velocity profiles along line \(X = 0.07,Y = 0,Z \in \left[ { - 0.{1464566929,0}} \right]\) which located at midpoint of initial boundary of the surface of oil.

Velocity profiles varying with time.
In Fig. 12, velocity in X-direction demonstrates flow motion due to acceleration induced by idling of engine, while velocity in Z-direction demonstrates upwelling of the oil. Up to this point, all flow variables of the concerns of powertrain engineer for analysis of structural response are available. In next section, structural characteristics of oil pan in current mechanical context are computed using finite element modal analysis method.
Finite element modal analysis of the influences of different materials on oil pan NVH performance
The structure of oil pan is analyzed via finite element modal approach based on multi-body framework including effects of oil flow and contacts. The implemented contacts are listed in Table 1.
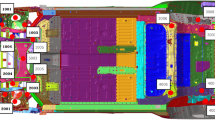
In last section, space enclosed by oil pan is discretized for flow simulation. In structural analysis, the solid body of oil pan is discretized. For comparisons of metal and plastic oil pan, meshes of both of them are presented in Fig. 13 for numerical analyzed.

Meshes of metal (upper) and plastic (lower) oil pan.
The material of metal oil pan is prescribed as steel, of which the elastic modulus is \(2.06 \times 10^{5} MPa\), Poisson’s ratio is 0.3, density is \(7800{{kg} \mathord{\left/ {\vphantom {{kg} {m^{3} }}} \right. \kern-0pt} {m^{3} }}\). The plastic oil pan is made of PA66 + GF35, of which the elastic modulus is \(5800MPa\), Poisson’s ratio is 0.4, density is \(1410{{kg} \mathord{\left/ {\vphantom {{kg} {m^{3} }}} \right. \kern-0pt} {m^{3} }}\). To evaluate the dynamic effects of idling, the vibration equation is applied and solved by SIM. So the effects of bolt preload ought to be computed to provide an initial stochastic quantum space vector. The oil pan under bolt preload is simulated and principle stress distribution is shown in Fig. 14.

Distribution of stress under bolt preload (MPa).
The distribution of principle stress with the preload exerted on the surface of oil pan is computed and shown in Fig. 15.

Distribution of stress under both bolt preload and hydrodynamical forces (MPa).
The modal frequencies of the first 6 orders of metal and plastic oil pan are obtained by multi-body modal analysis and compared with experiment data provided by YC DIESEL Corp. in Table 2 and Table 3.
Compared to metal oil pan, the application of plastics enhances the modal frequency by 37.55%, 39.11%, 32.01%, 42.04%, 39.59%, 31.20% respectively at the first 6 orders, which effectively avoid resonance by separating the natural frequency of a structure from the excitation frequency. The numerical results of vibration velocities in the first six orders are shown in Figs. 16, 17, 18, 19, 20, 21.

First vibration mode.

Second vibration mode.

Third vibration mode.

Fourth vibration mode.

Fifth vibration mode.

Sixth vibration mode.
Figures 16, 17, 18, 19, 20, 21 show the distributions of vibrational velocity \(U_{vib}\) of oil pans in different modes. In an oil pan, there is a sharp interface between oil and air. As the engine is idling, the state of oil-air system will develop under gravity, acceleration and surface tension force. In turn, the evolution of hydrodynamic characteristics will impact on structure and produce structural response. The surface velocities in different vibration modes, as shown in Figs. 16, 17, 18, 19, 20, 21, reflect the elastic response in a viscous/structural dynamics context. As a result, the physical information in process of idling of an engine is preserved via strict mathematical approach. Another property reflecting noise-vibration performance of the engine is sound power level of thin-walled part. In this section, the locations where the surface vibration velocity in the normal direction is high are captured and the locations of noise sources are spotted. The numerical results of noise of the oil pan characterized by sound power level \(L_{w}\) over the full frequency range are shown in Figs. 22, 23, 24, 25, 26.

Sound power levels at one-third octave band center (630 Hz).

Sound power levels at one-third octave band center (800 Hz).

Sound power levels at one-third octave band center (1000 Hz).

Sound power levels at one-third octave band center (1250 Hz).

Sound power levels at one-third octave band center (1600 Hz).
In comparisons of distributions of sound power level between metal and plastic oil pans, the locations of noise sources on which the sound power level is higher than mean value are indicated. It is demonstrated by Figs. 22, 23, 24, 25, 26 that, on the whole, the sound power level of plastic oil pan is much lower than metal oil pan. Sound power levels varing with frequency at one-third octave band center of metal and plastic oil pans are extracted and compared with Ref53 in Fig. 27. At vibration frequency of 458 Hz, 573 Hz, 723 Hz, 1825 Hz, 2275 Hz, the sound power levels of plastic oil pan are 80.3 dB, 87.7 dB, 90.3 Hz, 92.2 dB, 89.2 dB respectively while the sound power levels of metal oil pan are 88 dB, 94.9 dB, 95.2 dB, 95.1 dB, 86.8 dB respectively. In a broad frequency range, plastic oil pan create less noise than metal oil pan.

Sound power levels varing with frequency at one-third octave band center.
In this section, it is verified that the plastic oil pan produces less noise and has less risk of resonance with higher modal frequency. Numerical results show the NVH advantages of plastic as material constituent of automobile parts on reduction of vibrations and noise. For lightweight design, it is also persuasive to apply plastics in thin-walled parts of engine. The present blended numerical method also illustrates the fluid/structural responses in a multi-body system, which reveals the mechanical characteristics of powertrain at idling.
Conclusion and discussion
In this paper, a CFD-finite element modal analysis blending numerical method on muti-body framework for researches of NVH properties of engine is proposed. With unstructured mesh strategy, complex geometry of oil pan is discretized into well resolved computational domain. Flow details of oil-air two-phase phenomenon in oil pan of an idling engine are captured by pressure-correlated/VOF coupled scheme. The vibration and noise performances are fully presented via modal analysis. Computational results in current work are illustrative pictures of elastohydrodynamics of plastic oil pan and quantitative indications for NVH features of an engine system. By contrast of the numerical results of vibrations and acoustic characteristics between plastic oil pan and metal oil pan, the advantages of plastics in better acoustic performance, fewer harmful vibrations and more favorable ecological function in automotive engineering are verified. Comparisons with benchmark data confirm the numerical predictions and reliability of present method. Current numerical method is a tool for analysis of factors affecting the NVH behavior. However, as a blended framework, the current method lacks description of nonlinear phenomena at fluid/solid interfaces of contacted parts. In the future, researches can be done to develop the current multi-body framework and extend the present method to oil/air/solid three-phase dynamics in powertrain system for better exploration of the strategies for engine performance optimization.
Data availability
The raw data is uploaded in a supplementary file.
References
Yan, C. et al. Study on the effect of applying new damping material to vibration and noise reduction of oil sumps. Noise and Vibration Control 39(5), 218–222 (2019).
Aziz, S. A. A. Noise Vibration and Harshness (NVH) study on Malaysian armed forces (MAF) tactical vehicle. Appl. Mech. Materials 165, 165–169 (2012).
Masri, J., Amer, M., Salman, S., Ismail, M. & Elsisi, M. A survey of modern vehicle noise, vibration, and harshness: A state-of-the-art. Ain Shams Engineering Journal 15(10), 102957 (2024).
Zhang, J. & Han, J. CAE process to simulate and optimise engine noise and vibration. Mech. Syst. Signal Process. 20(6), 1400–1409 (2006).
Panda, K. C. Dealing with noise and vibration in automotive industry. Procedia Engineering 144, 1167–1174 (2016).
Xi, J., Feng, Z., Wang, G. & Wang, F. Vibration and noise source identification methods for a diesel engine. J. Mech. Sci. Technol. 29, 181–189 (2016).
Graf, B., Brandl, S., Sontacchi, A. & Girstmair, J. Objective parameters for engine noise quality evaluation. Auto Tech Review 2, 38–43 (2013).
Nag, S., Sharma, P., Gupta, A. & Dhar, A. Combustion, vibration and noise analysis of hydrogen-diesel dual fuelled engine. Fuel 241, 488–494 (2019).
Yildizhan, S., Uludamar, E., Ozcanli, M. & Serin, H. Evaluation of effects of compression ratio on performance, combustion, emission, noise and vibration characteristics of a VCR diesel engine. International Journal of Renewable Energy Research 8(1), 90–100 (2018).
Park, T. J. & Kim, K. W. Elastohydrodynamic lubrication of a finite line contact. Wear 223(1–2), 102–109 (1998).
Glovnea, R. & Zhang, X. Elastohydrodynamic films under periodic load variation: An experimental and theoretical approach. Tribol. Lett. 66, 116 (2018).
Höglund, E. Influence of lubricant properties on elastohydrodynamic lubrication. Wear 232(2), 176–184 (1999).
Björling, M. & Shi, Y. DLC and Glycerol: Superlubricity in rolling/sliding elastohydrodynamic lubrication. Tribol. Lett. 67, 23 (2019).
Ponjavic, A. & Wong, J. The effect of boundary slip on elastohydrodynamic lubrication. RCS Advances 4, 20821–20829 (2014).
Washizu, H. & Ohmori, T. Molecular dynamics simulations of elastohydrodynamic lubrication oil film. Lubr. Sci. 22(8), 323–340 (2010).
Dowson, D. Modelling of elastohydrodynamic lubrication of real solids by real lubricants. Meccanica 33, 47–58 (1998).
Dong, Q. & Zhou, K. Elastohydrodynamic lubrication modeling for materials with multiple cracks. Acta Mech. 225, 3395–3408 (2014).
Hili, J., Pelletier, C., Jacobs, L., Oliver, A. & Reddyhoff, T. High-speed elastohydrodynamic lubrication by a dilute oil-in-water emulsion. Tribol. Trans. 61(2), 287–294 (2018).
Mu, S. & Feng, X. Analysis of elastohydrodynamic lubrication of ball screw with rotating nut. Appl. Mech. Mater. 121–126, 3132–3139 (2011).
Kaneta, M. et al. Thermal elastohydrodynamic lubrication of ceramic materials. Tribol. Trans. 61(5), 869–879 (2018).
Li, S. & Kahraman, A. Prediction of spur gear mechanical power losses using a transient elastohydrodynamic lubrication model. Tribol. Trans. 53(4), 554–563 (2010).
Liu, Y. & Zhao, J. Research on elastohydrodynamic lubrication theory of rolling bearing type planetary friction transmission mechanism. Advanced Materials Research 199–200, 400–403 (2011).
Paik, K. J., Carrica, P. M., Lee, D. & Maki, K. Strongly coupled fluid-structure interaction method for structural loads on surface ships. Ocean Eng. 36(17–18), 1346–1357 (2009).
Maki, K. J., Lee, D., Troesch, A., Troesch, A. W. & Vlahopoulos, N. Hydroelastic impact of a wedge-shaped body. Ocean Eng. 38(4), 621–629 (2011).
Yang, Q. & Qiu, W. Numerical simulation of water impact for 2D and 3D bodies. Ocean Eng. 43, 82–89 (2012).
Dhavalikar, S., Awasare, S., Joga, R. & Kar, A. R. Whipping response analysis by one way fluid structure interaction-A case study. Ocean Eng. 103, 10–20 (2015).
McVicar, J., Lavroff, J., Davis, M. R. & Thomas, G. Fluid-structure interaction simulation of slam-induced bending in large high-speed wave-piercing catamarans. J. Fluids Struct. 82, 35–58 (2018).
Lakshmynarayanana, P. A. & Temarel, P. Application of CFD and FEA coupling to predict dynamic behaviour of a flexible barge in regular head waves. Mar. Struct. 65, 308–325 (2019).
Jiao, J., Huang, S., Wang, S. & Soares, C. G. A CFD-FEA two-way coupling method for predicting ship wave loads and hydroelastic responses. Appl. Ocean Res. 117, 102919 (2021).
Sun, Z., Liu, G., Zou, L., Zheng, H. & Djidjeli, K. Investigation of non-linear ship hydroelasticity by CFD-FEM coupling method. Journal of Science and Engineering 9, 511–527 (2021).
Chu, B. et al. Numerical study on wave-induced hydro-elastic responses of a floating raft for aquaculture. Ocean Eng. 240, 109869 (2021).
Kampitsis, A., Kapasakalis, K. & Via-Estrem, L. An integrated FEA-CFD simulation of offshore wind turbines with vibration control systems. Eng. Struct. 254, 113859 (2022).
Jiao J., Wang S., Soares C. G. A CFD-FEA coupled method for ship hydroelasticity analysis. In Trends in Maritime Technology and Engineering, 359–364. (2022)
Huang, S., Hu, Z. & Chen, C. Application of CFD-FEA coupling to predict hydroelastic responses of a single module VLFS in extreme wave conditions. Ocean Eng. 280, 114754 (2023).
Duan, J., Pei, Z. & Zhang, L. A CFD-FEA coupling method for collapse characteristics analysis on bulk carriers under waves after flooding. Ocean Eng. 324, 120787 (2025).
Pan, D., Zhong, C., Zhuo, C. & Liu, S. A two-stage fourth-order gas-kinetic scheme on unstructured hybrid mesh. Comput. Phys. Commun. 235, 75–87 (2019).
Pan, D., Zhong, C. & Zhuo, C. An implicit discrete unified gas-kinetic scheme for simulations of steady flows in all flow regimes. Communications in Computational Physics 25(5), 1469–1495 (2019).
Pan, D., Zhang, R., Zhuo, C., Liu, S. & Zhong, C. A multi-degree-of-freedom gas kinetic multi-prediction implicit scheme. J. Comput. Phys. 475(9), 111871 (2023).
Pan, D., Zhuo, C., Liu, S. & Zhong, C. Multi-degree-of-freedom kinetic model and its applications in simulation of three-dimensional nonequilibrium flows. Comput. Fluids 265, 106020 (2023).
Pan, D., Zhong, C., Li, J. & Zhuo, C. A gas-kinetic scheme for the simulation of turbulent flows on unstructured meshes. Int. J. Numer. Meth. Fluids 82(11), 748–769 (2016).
Pan, D., Zhong, C. & Zhuo, C. An implicit gas-kinetic scheme for turbulent flow on unstructured hybrid mesh. Comput. Math. Appl. 75, 3825–3848 (2018).
Reddy, R. & Banerjee, R. GPU accelerated VOF based multiphase flow solver and its application to sprays. Comput. Fluids 117, 287–303 (2015).
Huang, Y., Ge, M. & Zheng, G. Study on the dynamic modeling of two-phase flow and lubrication characteristics of toothless stirring oil pans. Processes 13(3), 829–853 (2025).
Kanarska, Y., Dunn, T., Glascoe, L., Lundquist, K. & Noble, C. Semi-implicit method to solve compressible multiphase fluid flows without acoustic time step restrictions. Comput. Fluids 210, 104651 (2020).
Kwatra, N., Su, J., Grétarsson, J. T. & Fedkiw, R. A method for avoiding the acoustic time step restriction in compressible flow. J. Comput. Phys. 228(11), 4146–4161 (2009).
Wardle, K. E. & Weller, H. G. Hybrid multiphase CFD solver for coupled dispersed/segregated flows in liquid-liquid extraction. Inter. J. Chem. Eng. 2013, 3–24 (2013).
Gao, T. Simulation and structural improvement study of vibration and noise in piston compressor oil pan (Harbin Engineering University, 2020).
Łasecka-Plura, M. & Lewandowski, R. The subspace iteration method for nonlinear eigenvalue problems occurring in the dynamics of structures with viscoelastic elements. Comput. Struct. 254, 106571 (2021).
Bowyer A. Computing Dirichlet tessellations, 24(2): 162–166. (1981)
Watson, D. F. Computing the N-dimensional Delaunay tessellation with applications to Voronoi polytopes. Computer Journal 24(2), 167–172 (1981).
Lewis, R. W., Zheng, Y. & Gethin, D. T. Three-dimensional unstructured mesh generation: Part 3. Volume meshes. Comput. Methods Appl. Mech. Eng. 134(3), 285–310 (1996).
Chen, J., Huang, Z., Yang, Y., Zheng, Y. & Zheng, J. Unstructured tetrahedral mesh generation for complex configurations. Acta Aerodynamica Sinica 28(4), 400–404 (2010).
Dong, Y. et al. Research on the influence of plastic oil pan of the engine on the NVH performance. J. Phys: Conf. Ser. 2932, 012033 (2025).
Funding
This work was supported by the Guangxi Science and Technology Major Programe (AA24206041) and the Hong Kong, Macao and Taiwan High-Level Talents Gathering in Guangxi Project (HMTP2023005).
Author information
Authors and Affiliations
Contributions
Yangyang Dong, Dongxin Pan and Yiyong Han made the conceptualization; Yangyang Dong and Dongxin Pan constructed the methodology; Lu Ban configured the software; Dongxin Pan wrote the original draft; Yi Fan supervised the project. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Pan, D., Dong, Y., Ban, L. et al. A blended CFD/multi-body analysis method for elastohydrodynamics of plastic oil pan. Sci Rep 15, 42749 (2025). https://doi.org/10.1038/s41598-025-26785-5
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-26785-5
