
Abstract
With the rapid proliferation of IoT technology, cybersecurity challenges have become increasingly prominent. Traditional centralized network intrusion detection systems (NIDS) exhibit significant limitations including privacy risks and inadequate modeling of spatiotemporal correlations. This paper proposes FedT-DQN (Transformer-based Federated Double Q-Network), a novel federated reinforcement learning framework for dynamic intrusion detection. The method incorporates: (1) A Transformer encoder as federated aggregator using self-attention mechanisms; (2) A dual-layer Q-network architecture decomposing detection into feature extraction and decision optimization; (3) Soft Actor-Critic (SAC) integration for local training considering system heterogeneity. Experimental results on four benchmark datasets show that FedT-DQN achieves over \(99\%\) detection accuracy with enhanced F1 scores and reduced false positive rates, all while maintaining data privacy. The source code for this study is available at https://github.com/BuLaTaa/FedT-DQN-in-IDS..
Similar content being viewed by others


Introduction
With the rapid development of Internet of Things (IoT) technology, its applications have penetrated into key areas such as smart homes, smart cities, industrial automation, healthcare, and intelligent transportation, driving society towards a highly interconnected digital future. This growth has significantly expanded the attack surface for network security, with new threats such as botnets, distributed denial-of-service (DDoS), and zero-day exploits continuing to emerge1, making cybersecurity a core challenge in achieving trustworthy IoT systems2,3. Against this backdrop, machine learning-based network intrusion detection systems (ML-based NIDS) have garnered significant attention due to their ability to uncover potential threats from massive heterogeneous traffic data4,5. Traditional network intrusion detection systems (NIDS) focus on signature-based and anomaly-based methods. Signature-based approaches achieve high-precision detection by matching known attack signatures but fail to identify new threats. Anomaly-based methods use machine learning algorithms (such as support vector machines6,7, random forests8, convolutional neural networks9) to model normal behavior patterns and detect anomalies. However, these approaches face critical limitations:
-
1.
Traditional ML methods heavily rely on manual feature engineering and single-sample analysis, making it difficult to capture the spatio-temporal correlations between network traffic10,11.
-
2.
Based on CNN/RNN DL models, although they can automatically extract flow-level features, they fail to model the context of complex attack behaviors (such as distributed denial-of-service attacks) due to ignoring network topology and endpoint interaction relationships12.
-
3.
In addition, the dynamic evolution of attack patterns and the frequent emergence of new threats force models to be continuously retrained to maintain effectiveness. The centralized training paradigm faces serious privacy risks–network traffic often contains sensitive operational information, and direct sharing may lead to the leakage of trade secrets or malicious abuse13.
Although there has been significant academic progress in deep models, practical deployment still heavily depends on rule-based systems (e.g., Snort). This reliance highlights issues such as poor generalization and difficulty handling concept drift14,15. Therefore, there is a need for new frameworks that balance privacy protection, dynamic adaptability, and cross-domain generalization. Federated Learning (FL) allows for collaborative training through local parameter aggregation while maintaining privacy. It has been successfully applied in areas like smart homes16 and autonomous driving17. However, in network intrusion detection, FL faces two main challenges: dynamic network environments that require real-time adaptation and node heterogeneity, which causes instability during convergence. To address these, Federated Reinforcement Learning (FRL) combines RL with FL to improve generalization against unknown threats. However, existing FRL methods rely on simple averaging (FedAvg18), which overlooks node environmental differences and fails to capture the temporal nature of attacks. This limits both accuracy and robustness.
This paper proposes FedT-DQN (Federated Transformer-based Double Q-Network) addressing three key shortcomings: (1) Traditional FL aggregation cannot capture spatiotemporal correlations in traffic data; (2) Averaging methods cause policy mismatches in heterogeneous environments19; (3) Static feature engineering struggles with rapidly evolving attack types.
The contributions of our proposed FedT-DQN model are as follows:
-
1.
We introduce a Transformer encoder as the federated aggregator, dynamically learning contextual dependencies between nodes through the self-attention mechanism, thereby replacing the traditional weighted averaging operation. This method draws inspiration from FedFormer’s contextual aggregation idea but further optimizes the calculation of attention weights. This allows it to identify clusters of nodes with similar threat patterns without exposing node metadata (such as network topology, traffic volume), thereby enhancing the relevance of model updates.
-
2.
We design a Double Q-Network structure, decomposing the intrusion detection strategy into two stages:low-level feature extraction and high-level decision optimization. The low-level network learns spatio-temporal features based on local traffic sequences, utilizing the Transformer’s temporal modeling capability to capture long-range dependencies. The high-level network then optimizes global defense strategies through federated collaboration, combining the \(\epsilon\)-greedy exploration mechanism to balance the detection of known attacks and the discovery of unknown threats.
-
3.
We incorporate Soft Actor-Critic (SAC) into the policy network for training on local clients, taking into account factors such as computational capabilities, data distribution diversity, and network conditions to mitigate the impact of system heterogeneity.
To the best of our knowledge, we are the first to introduce Transformer into Federated Reinforcement Learning as an aggregator for the task of intrusion detection. Experiments demonstrate that this framework achieves significant improvements in key metrics such as F1-score and AUC on four commonly used intrusion detection datasets, compared to intrusion detection methods that employ FedAvg18 aggregation and Independent Q-Learning20, while maintaining local data privacy. We also conducted comparative tests on the newly released UNSW-MG24 and CIC IIoT 2025 datasets, where our method continued to show excellent performance. Furthermore, it exhibits significant tolerance to training latency for resource-constrained nodes.
Related works
This section reviews the evolution of artificial intelligence methods in Network Intrusion Detection Systems (NIDS) for the Internet of Things, covering the application challenges and innovations of machine learning (ML) and deep learning (DL) technologies. Building on this foundation, it further summarizes the research progress of Federated Reinforcement Learning (FRL), analyzing its potential in privacy protection and dynamic threat detection.
Network intrusion detection
Traditional IDS research employs various ML techniques including k-Nearest Neighbors (KNN)21, Decision Trees22, Support Vector Machines (SVM)6,7, clustering23,24, Random Forests8, and Artificial Neural Networks (ANN)25. However, these models increase system complexity and reduce efficiency with large heterogeneous data volumes26.Deep learning-based IDS has evolved through multiple technical approaches. Autoencoders (AE) represent unsupervised learning, with Muhammad et al.27 applied stacked AEs with multi-layer perceptrons for financial IoT security, validating feature latent space optimization on KDDCup99. Siddiqui28 proposed adaptive ensemble AE models supporting lightweight edge deployment while maintaining stable performance. Convolutional Neural Networks (CNN) leverage spatial feature extraction advantages. Karaca et al.29 utilized 1D-CNN with adaptive particle swarm optimization for botnet detection, achieving 98% accuracy but risking overfitting. For temporal dependencies, Le et al.30 employed RNN variants (LSTM/GRU) for time-based traffic features, reducing detection error by 2% on NSL-KDD. Ullah’s team31 proposed lightweight LSTM-GRU models using regularization and weighted loss for data imbalance. Recent hybrid models gain popularity by fusing multi-perspective features. Wang et al.32,33combined Transformer with CNN, achieving 1.87% accuracy improvement on CICDDoS2019, though generalization was limited by single dataset validation. Hassan34 innovatively fused CNN with Weight-Dropped LSTM, using CNN for feature extraction and WDLSTM for dependency modeling, effectively alleviating overfitting on UNSW-NB15. Table 1 compares performance and limitations of various IDS models using different ML algorithms. However, existing methods face challenges including high complexity, low training efficiency, and insufficient privacy protection, requiring exploration of lightweight architectures, dynamic attention mechanisms, and federated learning integration.As an expansion to IDS applications, M. Koca35,36 provides supplementary insights into machine learning-based methods for network security risk detection and adaptive modeling.
Federated learning-based IDS
Table 2 summarizes relevant work utilizing Federated Learning (FL) for Network Intrusion Detection (NIDS). However, existing work has several limitations. Most FL research relies solely on FedAvg aggregation43, which struggles with real-world data heterogeneity and robustness issues. Additionally, commonly used CNNs and DNNs44,45 face significant challenges: CNNs are ill-suited for tabular network traffic data, while DNNs suffer from overfitting and class imbalance problems, often biasing toward majority classes and failing to detect subtle attack behaviors.Few studies simultaneously address data privacy protection, model scalability, and generalization. While some incorporate reinforcement learning methods like Deep Q-Learning (DQN)46, these approaches struggle to capture long-distance temporal dependencies in local feature extraction.Therefore, this study employs Transformer self-attention mechanisms and Q-network reinforcement learning within federated environments. Transformers efficiently model global dependencies between network flow features, while Q-networks optimize detection strategies through reward mechanisms. We evaluate various non-IID scenarios and implement dynamic attention-weighted averaging aggregation beyond traditional FedAvg.
Background
In this section, we will discuss the relevant background knowledge of federated learning, reinforcement learning, and attention mechanisms.
Federated learning
Traditional machine learning algorithms rely on centralized data storage, requiring all training data to be collected in a single data center. However, with increasing demands for data privacy protection, this centralized model faces significant challenges, particularly in sensitive fields such as healthcare and finance where data leakage risks are critical. Federated Learning (FL) emerges as an innovative distributed collaborative learning paradigm that constructs a decentralized training framework by integrating machine learning, distributed computing, and privacy protection technologies. Its core mechanism allows multiple data holders (clients) to jointly optimize a global model without exchanging original local data through parameter transmission. Each participating client trains the model using local data, periodically uploads model parameters to the central server for global aggregation, then synchronizes the optimized global parameters to update local models. This “data stays local, model moves” paradigm effectively reduces bandwidth demands while fundamentally avoiding data privacy leakage through local data storage. The communication process follows these steps:
-
1.
Global model initialization: The system selects a subset of participating gateways according to a preset ratio, initializes the main model, and distributes it to all selected gateways to initiate distributed training.
-
2.
Local model training: Each gateway performs localized training on the received global model using its private dataset, generating an enhanced sub-model adapted to local data characteristics through iterative optimization.
-
3.
Parameter feedback: All participating devices upload optimized model weights to the central server through encrypted channels to ensure data privacy.
-
4.
Federated model aggregation: The central server employs a weighted averaging aggregation algorithm to fuse distributed model parameters, integrating learning outcomes from each node to construct a comprehensive global model.
-
5.
Model synchronization: The enhanced global model is distributed to all client devices via secure transmission protocol, completing the federated learning loop and improving generalization capability across different data domains.
Reinforcement learning
Reinforcement Learning (Reinforcement Learning, RL), as an important paradigm in the field of machine learning, is committed to training intelligent agents (Agent) to autonomously construct optimal decision-making strategies through interactive learning with dynamic environments (Environment). Its core mechanism is embodied in the “action-feedback-learning” closed loop: after the agent performs an action (Action), it receives immediate rewards (Reward) from the environment’s feedback, continuously improving its decision-making ability through policy iteration optimization. At the level of mathematical modeling, reinforcement learning problems are usually formalized as Markov Decision Processes (Markov Decision Process, MDP)48, whose five-element framework includes:
-
1.
State Space: A complete representation of the observable features of the environment.
-
2.
Action Space: The set of controllable operations for the agent.
-
3.
Reward Function: The environment’s immediate evaluation of state-action pairs.
-
4.
Transition Dynamics: The stochastic rules governing the evolution of the environment’s state.
-
5.
Discount Factor: The decay coefficient for future rewards.
The Policy Function, as the core decision-making component of the agent, defines the probability distribution mapping from states to actions. Its implementation ranges from table lookup methods based on dynamic programming to more complex frameworks such as Deep Q-Networks (DQN). The Value Function, on the other hand, estimates the long-term expected return of states using the Bellman Equation, providing a theoretical basis for policy optimization. The learning objective can be formally expressed as:
Where \(\gamma \in [0,1)\) is the temporal discount factor, and \(V^{\pi }(s)\)represents the long-term value of state ss under policy \(\pi\). Through methods such as Temporal Difference Learning (TDLearning) or Policy Gradient, the agent continuously updates its policy parameters, ultimately converging to the optimal policy \(\pi ^{*}\).
Deep Q-learning
Q-learning represents a value-based reinforcement learning approach that iteratively refines state-action estimates to determine optimal policies. The algorithm progressively enhances Q-values using Bellman optimality principles through temporal difference learning:
Parameters \(\alpha\) (learning coefficient) and \(\gamma\) (discount factor) control update magnitude and future reward importance. Traditional Q-learning faces scalability limitations in discrete, finite state-action spaces. Deep Q-Learning addresses these constraints by employing neural networks as function approximators, enabling Q-value prediction for high-dimensional state representations. The optimization minimizes mean squared error between predicted and target values:
Experience replay enhances stability by breaking data correlations, while Prioritized Experience Replay improves sampling efficiency through dynamic priority weighting based on temporal difference errors. This approach enables effective handling of complex state spaces for practical applications in network intrusion detection.
Soft Actor-Critic (SAC)
Policy gradient approaches in reinforcement learning optimize parameters \(\theta\) within policy \(\pi _\theta\) through value function-guided parameter updates:
This methodology encounters significant variance challenges stemming from cumulative reward summations across episodes, where reward distributions exhibit substantial fluctuations between different trajectories. Actor-critic architectures address this limitation by employing value approximation functions that estimate expected returns while undergoing independent optimization processes. The critic component, representing the Q-function, utilizes off-policy temporal difference learning for error minimization:
The target Q-function \(Q_{\psi }\)represents a parameterized average of historical Q-functions, while D denotes the experience replay mechanism for past interactions. Contemporary actor-critic variants incorporate49 entropy regularization terms within policy gradient computations to enhance exploration capabilities. The Soft Actor-Critic (SAC) framework implements this enhancement through modified policy updates:
Where b(S) is a learned state-dependent baseline function.
Self-attention mechanism
Self-Attention is a mechanism that models global dependencies by dynamically calculating the correlation weights between elements within a sequence. Its core formula is:
Here the input sequence X=[\(x_1,x_2,\ldots ,x_n\)] generates the query matrix \(Q=XW_Q\),\(Q=XW_Q\), the key matrix \(K=XW_K\), and the value matrix \(V=XW_V\) (where \(W_Q\),\(W_K\),\(W_V\) are learnable parameter matrices) through linear transformations. After calculating similarity via dot product, a scaling factor of \(\sqrt{d_{k}}\) (where \(\sqrt{d_{k}}\) is the dimension of the key vector) is introduced to stabilize gradients. Finally, the value vectors are weighted and summed to produce context-aware outputs. This mechanism breaks through the local dependency limitations of traditional RNNs, enabling the model to capture associations among all positions within the sequence simultaneously.
Methodology
This section presents a comprehensive methodology framework for assessing intrusion detection system generalization capabilities within diverse network environments. We define heterogeneous networks through datasets derived from distinct network infrastructures, enabling systematic evaluation of cross-domain performance. Existing Transformer-based NIDS models mainly use self-attention mechanisms for feature extraction but rely on traditional parameter aggregation methods (e.g., FedAvg18), which cannot effectively address data heterogeneity and dynamic attack patterns. In contrast, the FedT-DQN model introduces Transformer into the federated learning framework and combines it with the Double Q-Network (DQN) architecture from deep reinforcement learning. This model captures long-term dependencies during feature extraction and optimizes the global defense strategy through reinforcement learning. Additionally, FedT-DQN innovatively uses a dynamic self-attention aggregation algorithm to weight detection experiences from different clients, improving adaptability and accuracy in heterogeneous network environments.
The architectural design draws inspiration from established reinforcement learning applications in Meta-World fall detection scenarios and vehicle control balance systems50. These precedent studies employed reinforcement learning frameworks for continuous prediction tasks, which we adapted by implementing discrete task prediction networks specifically tailored for intrusion detection scenarios. This methodological adaptation investigates whether discrete prediction mechanisms can strengthen detection capabilities against previously unseen attack vectors. Research evidence supports the generalization potential of this approach46. While federated learning presents clear advantages over traditional supervised learning paradigms for NIDS applications (as outlined in Section 1), current research exhibits limited investigation into heterogeneous data scenarios. This research gap results in substantial performance variations when systems encounter diverse dataset characteristics. Furthermore, existing methodologies demonstrate insufficient contextual awareness when confronting novel threat landscapes. As established in Section 2, the majority of existing research lacks comprehensive evaluation under cross-dataset validation frameworks.
Data description
Our experimental framework necessitates uniform feature representation across all federated learning clients to ensure compatibility within horizontal federation architectures. This constraint guided our selection of four benchmark datasets that utilize standardized NetFlow feature extraction protocols. The experimental evaluation employs four IoT security datasets: NF-BoT-IoT-v2, NF-ToN-IoT-v2, NF-CSE-CIC-IDS2018-v2, and NF-UNSW-NB15-v2. Each dataset represents a NetFlow-processed version derived from their corresponding base collections (BoT-IoT, ToN-IoT, CSE-CIC-IDS2018, and UNSW-NB15). All datasets maintain consistent feature dimensionality through 43 flow-level NetFlow attributes. These attributes capture network communication patterns using the standard five-tuple specification: source/destination IP addresses, source/destination ports, and protocol identifiers. The feature space consists entirely of numerical values, enabling direct compatibility across different network environments. While our implementation utilizes NetFlow-standardized versions for consistency, comprehensive dataset characteristics are detailed in Table 3. In the experimental section, we compare the performance of FedT-DQN with other models on two real-world datasets: the UNSW-MG24 microgrid dataset and the CIC IIoT 2025 dataset, which consists of sensor and network data synchronously collected in an Industrial Internet of Things (IIoT) environment.
Data preprocessing
A hierarchical preprocessing architecture is employed to process heterogeneous network security datasets (CICIDS2018, Bot-IoT, ToN-IoT, NB15). During the client-level processing phase, each participating party performs independently:
-
1.
Dynamically encode categorical features such as protocol type (PROTOCOL/L7_PROTO): \(X_{\text {encoded}} = \phi (v) \in \mathbb {Z}^+\), where \(\phi\) is a mapping function based on value frequencies;
-
2.
Apply Z-score normalization after performing boundary clipping on numerical features:\(X_{\text {std}} = \frac{X - \mu }{\sigma }\);
-
3.
Verify the validity of the binary labels \(y \in {0,1}\);
-
4.
Split the data in a training set: test set = 4:1 ratio (random seed fixed to 42).
During the federated-level alignment phase, the system aggregates the global feature space \(\mathscr {F}g = \bigcup {k=1}^K \mathscr {F}k\) (K is the number of clients), performs zero-padding for missing features, and ensures that all client feature matrices satisfy \(\textbf{X}_k \in \mathbb {R}^{n \times d_g}\) (\(d_g=|\mathscr {F}_g|\)) through column sorting. This process successfully eliminates the heterogeneity problem between datasets where \(d_k \ne d_j\), providing the model with dimensionally unified inputs \({\textbf{X}_k, \textbf{y}k}{k=1}^K\) while maintaining the federated principle of localizing \(\mathscr {D}_k\).
Agent algorithm
Our approach adopts a federated learning architecture where each agent initializes a Q-network consisting of outer encoder, local encoder, transformer encoder, and output decoder networks. We modify the Soft Actor-Critic (SAC) algorithm using double Q-networks for stability and incorporate a contextual federated Q-function. The Local Encoder extracts low-level features, while the Transformer Encoder performs decision optimization.This integrates the experience replay mechanism from Mnih et al.51, achieving temporal correlation elimination through Monte Carlo sampling on actions based on policy network distribution (\(\pi (a|s)\)). Experience quadruples (\(s_{t}\), \(a_t\), \(r_{t+1}\), \(s_{t+1}\)) are stored in the experience pool, with random mini-batch sampling52 breaking Markov chain correlation. The intrusion detection problem is modeled as an MDP where each client maintains an IntrusionDetectionEnv with state space defined by network traffic features and binary action space 0: Normal, 1: Anomalous. The ClassificationPolicy uses a three-layer fully connected network (hidden dimensions: 256) outputting probability distribution through Categorical distribution. The reward function assigns 2.0 for correct attack detection, 1.0 for correct normal identification, and -3.0 penalty for false negatives. Double Q-networks (qf1, qf2) prevent value function overestimation, with input concatenating observed features and one-hot encoded actions. SAC balances exploration and exploitation through entropy regularization \(-\alpha \log (\pi _\theta (a|s))\). Policy updates follow: \(\nabla _\theta J(\pi _\theta ) = \mathbb {E}_{s \sim \mathscr {D}, a \sim \pi } \big [\nabla _\theta \log (\pi _\theta (a|s)) \nonumber \quad \cdot (-\alpha \log (\pi _\theta (a|s)) + Q_\psi (s,a) - b(s))\big ]\)Q-function updates use temporal difference learning: \(\mathscr {L}_Q(\psi ) = \mathbb {E}_{(s,a,r,s') \sim \mathscr {D}} \big [(Q_\psi (s,a) \nonumber \quad - (r + \gamma \mathbb {E}_{a' \sim \pi }[Q_{\bar{\psi }}(s',a')]))^2\big ]\)with target network \(Q_{\bar{\psi }}\) for stability.To address class imbalance, SimpleReplayBuffer implements weighted cross-entropy loss with normal samples weighted 1.0 and attack samples 10.0: \(\mathscr {L}{cls} = \text {CrossEntropyLoss}(\text {logits}, \text {labels}, \text {weight}=[1.0, 10.0])\). Policy loss combines classification and Q-value maximization: \(\mathscr {L}{policy} = -\mathbb {E}[Q(s,a)] + 0.5 \cdot \mathscr {L}{cls}\). Training uses FedPathCollector for data collection, storing (observation, action, reward, \(next_observation, terminal, labels)\) tuples. Parameter synchronization employs soft updates \(\theta _{target} \leftarrow \tau \theta + (1-\tau ) \theta _{target}\) (\(\tau =0.005\)) for convergence stability. Shown as Algorithm 1.

Client-side SAC for Intrusion Detection

Federated Aggregation with Transformer
Global model aggregation
The core innovation of this study lies in the FedT-DQN federated knowledge aggregation strategy based on Transformer attention mechanism, overcoming limitations of traditional FedAvg parameter averaging. Each client maintains N encoder networks: one trainable local encoder and N-1 frozen external encoders from other clients. During federated aggregation, the system inputs observation-action pair (o,a) into all encoders generating feature embeddings: \(e_i = E_i(o \oplus \text {onehot}(a))\), where action a is one-hot encoded and concatenated with observation features. To enable Transformer source distinction, learnable client identity encoding is added: \(e_i' = e_i + \text {PositionalEncoding}(i)\). A special CLS token serves as global context representation carrier. The Transformer encoder calculates inter-client correlation weights using multi-head attention: \(\text {Attention}(Q, K, V) = \text {softmax}(\frac{QK^T}{\sqrt{d_k}})V\), where query, key, and value matrices are \(Q = EW_Q\), \(K = EW_K\), \(V = EW_V\), and E is the input sequence containing all client embeddings and CLS token. Multi-head attention captures complementary information between clients from different representation subspaces, with each head focusing on specific knowledge patterns. The two-layer Transformer architecture learns basic inter-client correlations in the first layer and performs higher-order knowledge fusion in the second layer. Dynamic attention weights enable adaptive weighting of different clients’ detection experiences based on current network state, demonstrating strong adaptability for emerging attacks and heterogeneous environments. Shown as Algorithm 2.
Federated Q-function calculation integrates global context with local features: \(Q_i(o, a) = \text {Decoder}(\text {concat}(\text {CLS}, \text {Encoder}_{\text {local}}(o, a)))\). The CLS token contains aggregated knowledge from all clients after Transformer processing, while local encoder output preserves client-specific domain features. The decoder employs three-layer fully connected architecture mapping concatenated features of dimension \(2 \times 256\) to scalar Q-value output. This design leverages collective federated intelligence while maintaining local specialization. During backpropagation, only local encoder and Transformer aggregation network parameters update, keeping external encoders frozen to prevent gradient conflicts and ensure stability. The federated aggregation protocol through FedAlgorithm class facilitates periodic knowledge exchange and model synchronization. Clients upload only local encoder parameters rather than entire models, protecting data privacy with lower communication overhead than traditional FedAvg. The server distributes updated encoder parameters to all clients, updating external encoder sets. The system implements early stopping based on F1 score and best model saving, automatically terminating training when global F1 score fails to improve for 5 consecutive rounds, preventing overfitting. This mechanism achieves intelligent knowledge fusion while maintaining personalized client capabilities, providing an ideal solution for collaborative intrusion detection in heterogeneous networks. Algorithm 2 outlines the aggregation process.
The integrated FedT-DQN model
The FedT-DQN framework integrates Federated Learning (FL) with Transformer-based aggregation and Deep Q-Networks (DQN) to enhance the performance and privacy of intrusion detection systems (IDS) in dynamic IoT environments. The key advantage of FedT-DQN lies in its ability to handle heterogeneous data from multiple clients and its robustness against non-IID data and adversarial attacks. The system architecture consists of multiple clients, each responsible for local training, and a central server aggregating model updates from clients using a self-attention-based Transformer mechanism.
Each client trains its local model using Q-learning to predict optimal actions in real-time, while a Double Q-Network (DQN) is employed to mitigate Q-value overestimation, a common issue in standard Q-learning. Furthermore, the model utilizes Soft Actor-Critic (SAC) to optimize the defense strategy dynamically, ensuring robust adaptation to evolving attack patterns. The global model is updated using federated aggregation methods that ensure both privacy and efficiency by only sharing model weights (or Logits) instead of raw data.
The Algorithm 3 describes the key steps in the FedT-DQN framework:

FedT-DQN Framework for Intrusion Detection
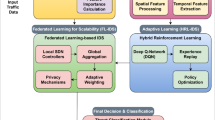
with the framework presented in Fig. 1.

The framework of FedT-DQN.SAC provides the local reinforcement learning training framework, employing the Double Q-network for stability, while the Transformer is integrated as the core of federated aggregation within the Q-network itself.
Experimental design
We constructed an evaluation framework incorporating four benchmark datasets–NF-UNSW-NB15-v2, NF-CSE-CIC-IDS-2018-v2, NF-Bot-IoT-v2, and NF-ToN-IoT-v2–to validate the detection efficacy of the proposed architecture. The experiments employed a dual-validation strategy for performance assessment. In the heterogeneous data distribution experiment, each client was configured with a distinct dedicated dataset, simulating real-world data heterogeneity and privacy constraints. In the homogeneous data distribution experiment, the complete dataset was randomly partitioned equally among all participating nodes to establish a performance baseline for data-sharing scenarios. We deployed a federated intrusion detection architecture comprising four edge agent nodes and a central aggregation server. System performance was quantitatively evaluated using standard classification metrics: accuracy, precision, recall, F1-score, and AUC.
This study employs a federated learning architecture with four clients, each utilizing a distinct intrusion detection dataset (NF-CIC-IDS2018-v2, NF-Bot-IoT-v2, NF-ToN-IoT-v2, NF-UNSW-NB15-v2). This setup effectively simulates the data heterogeneity found in real-world network environments. The selection of the number of clients is based on the following considerations: First, four clients provide sufficient data diversity to validate the effectiveness of federated learning while maintaining experimental control and reproducibility. Second, this scale aligns with the typical configurations of small and medium-sized network alliances in real-world deployment scenarios. The number of training rounds is set to 200, combined with an early stopping mechanism (patience=5), which ensures the model’s sufficient convergence while preventing overfitting. Each training round includes 1,000 steps of exploration sampling and 100 gradient updates. This setup balances the computational overhead between data collection and model training, ensuring that each client has sufficient interaction data to update its strategy.Other detailed parameters are shown in Table 4.
To implement our work, our experiments were parallelly run on a computing cluster consisting of an Intel® Xeon® Gold 5318Y CPU and 8 A40 GPUs, depending on availability.
Standard machine learning metrics, such as Accuracy, Precision, F1-Score, and Recall, are used to evaluate the model performance of our proposed system. These metrics are derived from the following values:True Positive, True Negative, False Positive and False Negative.
-
1.
TP:True Positive is the number of outcomes in which the model correctly predicts the positive class.
-
2.
TN:True Negative is the number of outcomes in which the mode correctly predicts the negative class.
-
3.
FP:False Positive is the number of outcomes in which the model incorrectly predicts the positive class.
-
4.
FN:False Negative is the number of outcomes in which the model incorrectly predicts the negative class.
The different metrics can be calculated from the items above as follows:
-
Accuracy: It is the ratio of the total number of correct predictions to the number of total predictions. \(Accuracy=\frac{TP+TN}{TP+FP+TN+FN}\)
-
Precision: It is the ratio of the number of correctly predicted positive samples to the number of samples that are predicted as positive. \(Precison=\frac{TP}{TP+FP}\)
-
Recall: It is the ratio of the number of correctly predicted positive predictions to the number of samples that are actually positive. \(Recall=\frac{TP}{TP+FN}\)
-
F1-Score: It is the harmonic mean of recall and precision. \(F1-Score=\frac{2\times Precison\times Recall}{Precison+Recall}\)
-
Area Under the Curve (AUC): is the area under the curve bordered by two parameters: true positive rate (TPR) and false positive rate (FPR). \(TPR=\frac{TP}{TP+FN}\) \(FPR=\frac{FP}{FP+TN}\)
Experimental results
Performance comparison across different datasets
We evaluated the performance of our model on the aforementioned four datasets. For all experiments, we plotted the model’s accuracy and the achieved loss over the 200 training rounds, as shown in Figs. 2 and 3. Here, Agents 0 to 3 were trained on “NF-cicids2018-v2.csv”, “NF-bot-iot-v2.csv”, “NF-ton-iot-v2.csv”, and “NF-nb15-v2.csv”, respectively, in a parallel manner. The best Accuracy achieved was 0.9922, 0.9987, 0.9984, and 0.9957, respectively. Comparing Q1_loss and Q2_loss, we observed that on the NF-cicids2018-v2, NF-bot-iot-v2, and NF-nb15-v2 datasets, the Q1 network exhibited smaller learning errors in its state-action value function, whereas the NF-bot-iot-v2 dataset showed lower loss on the Q2 network. To the best of our knowledge, this is the first federated learning work on intrusion detection research that achieves such high performance simultaneously on all four datasets.In prior state-of-the-art research, the TS-IDS53 model achieved the best performance on these four datasets for the binary classification task. Specifically, it attained the highest accuracy scores of 0.9843, 0.8821, 0.9985, and 0.9952 on the NF-CSE-CIC-IDS2018-v2, NF-BoT-IoT-v2, NF-ToN-IoT-v2, and NF-UNSW-NB15-v2 datasets, respectively. Our proposed FedT-DQN model, however, outperforms these results.

Changes in Accuracy over 200 rounds. The x-axis represents the rounds, and the y-axis represents the accuracy.

Changes in q1_loss and q2_loss on four clients during the 200 rounds of training.
we evaluated the average of various metrics on each agent client as well as the average of the metrics of the global model, as shown in Fig. 4.

The average performance metrics under different clients and the average performance value of the global model.
Comparison with other baselines
The Table 5 shows the binary classification results (ACC, AUC, macro precision, macro recall, and weighted F1) of our proposed model and the baselines on the four benchmark datasets.We have highlighted the data with the best performance in bold. We have the following findings: (1) Our model FedT-DQN performs exceptionally well on the baseline datasets compared to other federated learning models.(2) Compared to FTKD model54, our proposed method achieves better results on the four datasets. The Accuracy for NF-BoT-IoT-v2, NF-ToN-IoT-v2, NF-UNSW-NB15-v2, and NF-CICIDS2018-v2 increased by 5.36%, 2.12%, 3.91%, and 5.53%, respectively. This demonstrates the benefits of incorporating the SAC policy network and self-attention dynamic aggregation in federated learning for IDS. (3) Compared to the FDRL-IDS46 learning method, we found that all metrics achieved superior results. We believe that compared to the FDRL-IDS method, our inclusion of the Transformer encoder is beneficial for aggregating client knowledge. The attention heads focus on specific types of knowledge patterns, which significantly reduces misclassification.(4)In comparison with FCL-SBLS55, FedT-DQN boosts detection accuracy by 5 to 9 percentage points by enhancing its deep modeling capability and resolving the core issue of heterogeneous data fusion at the aggregation mechanism level. This approach remedies its notable deficiencies in both detection accuracy and cross-dataset generalization.
On the UNSW-MG24 and CIC IIoT 2025 datasets, we compared FedT-DQN with FDRL-IDS,FTKD and FCL-SBLS, three models geared towards IoT scenarios. As shown in Table 6, FedT-DQN consistently outperformed the other models across all metrics. The key difference lies in FedT-DQN’s use of the SAC network for policy optimization and its superior contextual modeling capability. This demonstrates its excellent ability to handle traffic data across diverse scenarios.
Processing results for randomly distributed data
Table 7 presents the evaluation results of our secondary experimental configuration, in which the entire dataset was randomly distributed evenly among participating agents. The results reveal remarkably consistent performance metrics between randomly partitioned data scenarios and customized distribution schemes, confirming our framework’s robust capability in managing non-independently and identically distributed (non-iid) data environments.
Ablation study
The impact of the aggregation algorithm
In this section, we evaluate a variant of our method, FedT-DQN-avg, where we replace the aggregation method with FedAvg and analyze it in the four datasets with a random distribution. The results of the ablation analysis are shown in Table 8, which shows that FedT-DQN outperforms FedT-DQN-avg, proving that after incorporating the policy network, dynamic self-attention aggregation is superior to FedAvg.
The impact of the SAC network
We also discuss the impact of the SAC network on the model. In Table 9, we compare the performance on metrics such as F1-Score and AUC with and without the SAC network. It can be observed that the FedT-DQN model incorporating the SAC network demonstrates significantly higher performance. This indicates that the integration of SAC not only improves the stability of decision-making but also enhances the model’s adaptability in dynamic environments. By introducing entropy regularization, SAC effectively balances exploration and exploitation, thereby optimizing the global defense strategy.
Running time
In federated learning, distributed node overhead is an unavoidable consideration. We report the actual running time of our proposed method per epoch, as our approach performs batch processing for both training and inference phases. We observed that the running times of these two phases are similar; therefore, we only present the per-batch running time of the training phase in the Table 10.
Computer complexity
In this section, we explore the time complexity of FedT-DQN and several other federated reinforcement learning models. The authors of the other models discussed herein did not provide calculations for their time complexity. Therefore, we present the time complexity of each model based on its components for the reader’s reference.
Let K denote the number of federated clients,\(n_k\) the number of local samples on client k,d the input feature dimension (d= 43 NetFlow attributes). H the hidden size of the encoder and Q-networks (H= 256). B the batch size and G the number of gradient steps per round. Each client maintains one policy network and two Q-networks implemented as three-layer MLPs. For a single MLP, the forward and backward pass on one sample requires \(O(dH + H^2)\) operations, where the term \(H^2\) dominates in our setting. Therefore, one gradient update on a mini-batch of size B incurs \(O(BH^2)\) complexity per client Summing over G updates, R communication rounds and K clients, the overall local SAC training cost is:
In FedT-DQN, the federated aggregation is implemented by a Transformer encoder that processess equence of length \(K+1\) (one embedding per client plus a CLS token). For each Transformer layer with hidden size H, computing the multi-head self-attention and the feed-forward network requires \(O(S^2H+ SH^2)\) operations, where \(S=K+1\) is the sequence length. Hence, with L layers the aggregation cost is
As K is typically small (e.g., K= 4 in our experiments),this term has the same order as a single forward pass of the local networks and does not change the overall asymptotic complexity, which remains dominated by \(T_{sac}\).We compared FedT-DQN with other models in Table 11.
FELIDS: The computational complexity of FELIDS consists of three main parts, local training, global aggregation, and parameter exchange. The complexity of local training is \(O(E \cdot nk \cdot (l_0 \cdot l_1 + \cdots + l_L \cdot l_{L+1}))\), where E is the number of local training epochs, \(n_k\) is the local data size for client k, \(l_x\) is the number of nodes in layer x, and L is the number of layers in the model. The complexity of global aggregation is \(O(K \cdot W)\), where K is the number of clients and W is the number of model parameters per client. The complexity of parameter exchange is O(W). The overall complexity is:\(O(FELIDS)=O(K \cdot E \cdot n_k \cdot (l_0 \cdot l_1 +\cdots + l_L \cdot l_{L+1}))+O(K \cdot W)+O(W)\)
FCL-SBLS: FCL-SBLS’s complexity comes from local training and global aggregation. Local training for each UAV has complexity \(|D_i|\cdot O(|w_i|\cdot f_p\cdot Q)\), and global aggregation is \(O(|w_g| \cdot f_p)\), where \(D_i\) is the local dataset size, \(|w_i|\) is the number of model weights, and Q is the number of SBLS blocks.The overall complexity is \(O(I\cdot D_i \cdot |w_i|\cdot Q+ |w_g|\cdot f_p\cdot N_r)\), where I is the number of UAVs, and \(N_r\) is the number of training epochs.
DRL-IDS: DRL-IDS using PPO2 has complexity \(O(G \cdot S \cdot A \cdot N)\), where G is the number of gradient steps, S is the state space size, A is the action space size, and N is the batch size. Over R rounds of training, the overall complexity is \(O(R\cdot G\cdot S \cdot A\cdot N)\)
FTKD: The time complexity of FTKD is dominated by local model training and EMMD aggregation. Local training has a complexity of \(O( N\cdot D)\), and the EMMD aggregation, which involves pairwise calculations, has a complexity of \(O(N^2)\). Thus, the overall time complexity is \(O(N^2)\). Making it efficient for moderate data sets but potentially slower for large ones.
Discussion
The federated learning framework adopted in this study protects the sensitive data of clients through local data storage and model aggregation. In federated learning, data is always kept locally, and only encrypted model updates are transmitted to a central server, thereby effectively preventing the leakage of raw data. To further enhance privacy protection, this model can also incorporate differential privacy techniques by adding noise to the model updates, ensuring that clients’ original data cannot be reconstructed during parameter aggregation.
However, despite its significant advantages in privacy protection, federated learning still has potential limitations and attack surfaces. First, malicious clients may compromise the quality of the global model or even leak other clients’ sensitive information by uploading manipulated model updates, Such attacks can infer sensitive data by analyzing model updates (e.g., gradient information). Therefore, preventing attacks from malicious clients while ensuring privacy remains a challenge in federated learning frameworks, Furthermore, the communication overhead and bandwidth limitations of federated learning can also affect the effectiveness of privacy protection, especially in edge computing environments, Balancing privacy protection with computational efficiency is a key direction for future research.
Conclusion and future directions
The FedT-DQN framework proposed in this study effectively addresses key challenges faced by network intrusion detection systems in IoT environments, including privacy protection, dynamic adaptability, and cross-domain generalization. It is the first to introduce a Transformer encoder into the federated aggregation process, achieving context-aware dynamic knowledge fusion through self-attention mechanisms, thereby overcoming the limitations of traditional FedAvg parameter averaging. The designed dual-layer Q-network architecture effectively separates feature learning and policy optimization processes, and combined with a dynamic client selection algorithm, significantly enhances detection performance in heterogeneous network environments. Experimental results demonstrate that FedT-DQN achieves significant performance improvements compared to traditional federated learning methods on four benchmark datasets. Additionally, in terms of aggregation algorithms, we propose dynamic aggregation based on self-attention mechanisms, providing a viable technical path for multi-institutional cybersecurity collaboration.
Although the FedT-DQN framework has shown promising results, it still faces challenges in large-scale deployment, including the high computational complexity of the Transformer attention mechanism, substantial communication overhead, insufficient robustness against adversarial attacks, and limited adaptability to concept drift. Future research will focus on the following directions: exploring efficient variants such as linear attention and sparse attention to reduce computational complexity; researching model compression and gradient quantization techniques to optimize communication efficiency; designing Byzantine-robust mechanisms to counter malicious client attacks; developing continual learning mechanisms to address evolving attack patterns; integrating multimodal security data sources to enhance detection comprehensiveness; and validating the practicality and scalability of the framework in real large-scale IoT environments. These research directions will drive the development of intelligent intrusion detection technologies in federated environments toward greater maturity and practicality.
Data availability
The Netflow datasets used in this study, “NF-BoT-IoT, NF-ToN-IoT, NF-CSE-CIC-IDS2018-v2, and NF-UNSW-NB15-v2,” are publicly available at https://staff.itee.uq.edu.au/marius/NIDS_datasets/. “UNSW-MG24,CIC IIOT 2025”are publicly available at https://ieee-dataport.org/documents/unsw-mg24 and https://www.unb.ca/cic/datasets/iiot-dataset-2025.html
References
Aslan, Ö., Aktuğ, S. S., Ozkan-Okay, M., Yilmaz, A. A. & Akin, E. A comprehensive review of cyber security vulnerabilities, threats, attacks, and solutions. Electronics 12, 1333 (2023).
Lv, Z., Han, Y., Singh, A. K., Manogaran, G. & Lv, H. Trustworthiness in industrial IoT systems based on artificial intelligence. IEEE Trans. Industr. Inf. 17, 1496–1504 (2020).
Bekri, W., Jmal, R. & Fourati, L. C. Secure and trustworthiness IoT systems: investigations and literature review. Telecommun. Syst. 85, 503–538 (2024).
Zuech, R., Khoshgoftaar, T. M. & Wald, R. Intrusion detection and big heterogeneous data: a survey. J. Big Data 2, 1–41 (2015).
Khan, M. A. & Kim, J. Toward developing efficient conv-ae-based intrusion detection system using heterogeneous dataset. Electronics 9, 1771 (2020).
Kuang, F., Xu, W. & Zhang, S. A novel hybrid kpca and svm with ga model for intrusion detection. Appl. Soft Comput. 18, 178–184 (2014).
Reddy, R. R., Ramadevi, Y. & Sunitha, K. N. Effective discriminant function for intrusion detection using svm, in 2016 International Conference on Advances in Computing, Communications and Informatics (ICACCI), 1148–1153 (IEEE, 2016).
Farnaaz, N. & Jabbar, M. Random forest modeling for network intrusion detection system. Procedia Comput. Sci. 89, 213–217 (2016).
Li, Z., Liu, F., Yang, W., Peng, S. & Zhou, J. A survey of convolutional neural networks: Analysis, applications, and prospects. IEEE Trans. Neural Netw. Learn. Syst. 33, 6999–7019 (2021).
Dina, A. S. & Manivannan, D. Intrusion detection based on machine learning techniques in computer networks. Internet Things 16, 100462 (2021).
Tsai, C.-F., Hsu, Y.-F., Lin, C.-Y. & Lin, W.-Y. Intrusion detection by machine learning: A review. Expert Syst. Appl. 36, 11994–12000 (2009).
Lansky, J. et al. Deep learning-based intrusion detection systems: A systematic review. IEEE Access 9, 101574–101599 (2021).
Ahmed, S. F. et al. Deep learning modelling techniques: Current progress, applications, advantages, and challenges. Artif. Intell. Rev. 56, 13521–13617 (2023).
Gama, J., Žliobaitė, I., Bifet, A., Pechenizkiy, M. & Bouchachia, A. A survey on concept drift adaptation. ACM Comput. Surveys (CSUR) 46, 1–37 (2014).
Kumar, V., Sinha, D., Das, A. K., Pandey, S. C. & Goswami, R. T. An integrated rule based intrusion detection system: analysis on unsw-nb15 data set and the real time online dataset. Clust. Comput. 23, 1397–1418 (2020).
Stojkoska, B. L. R. & Trivodaliev, K. V. A review of internet of things for smart home: Challenges and solutions. J. Clean. Prod. 140, 1454–1464 (2017).
Yurtsever, E., Lambert, J., Carballo, A. & Takeda, K. A survey of autonomous driving: Common practices and emerging technologies. IEEE Access 8, 58443–58469 (2020).
McMahan, B., Moore, E., Ramage, D., Hampson, S. & y Arcas, B. A. Communication-efficient learning of deep networks from decentralized data, in Artificial intelligence and statistics, 1273–1282 (PMLR, 2017).
Wang, J., Liu, Q., Liang, H., Joshi, G. & Poor, H. V. Tackling the objective inconsistency problem in heterogeneous federated optimization. Adv. Neural. Inf. Process. Syst. 33, 7611–7623 (2020).
Watkins, C. J. & Dayan, P. Q-learning. Mach. Learn. 8, 279–292 (1992).
Li, W., Yi, P., Wu, Y., Pan, L. & Li, J. A new intrusion detection system based on KNN classification algorithm in wireless sensor network. J. Electric. Comput. Eng. 2014, 240217 (2014).
Quinlan, J. R. Induction of decision trees. Mach. Learn. 1, 81–106 (1986).
Jain, A. K. & Dubes, R. C. Algorithms for Clustering Data (Prentice-Hall, Inc., 1988).
Saxena, A. et al. A review of clustering techniques and developments. Neurocomputing 267, 664–681 (2017).
Bivens, A. et al. Network-based intrusion detection using neural networks. Intell. Eng. Syst. Artif. Neural Netw. 12, 579–584 (2002).
Aljawarneh, S., Aldwairi, M. & Yassein, M. B. Anomaly-based intrusion detection system through feature selection analysis and building hybrid efficient model. J. Comput. Sci. 25, 152–160 (2018).
Muhammad, G., Hossain, M. S. & Garg, S. Stacked autoencoder-based intrusion detection system to combat financial fraudulent. IEEE Internet Things J. 10, 2071–2078 (2020).
Siddiqui, A. J. & Boukerche, A. Adaptive ensembles of autoencoders for unsupervised IoT network intrusion detection. Computing 103, 1209–1232 (2021).
Karaca, K. N. & Çetin, A. Botnet attack detection using convolutional neural networks in the IoT environment, in 2021 International Conference on Innovations in Intelligent Systems and Applications (INISTA), 1–6 (IEEE, 2021).
Le, T.-T.-H., Kim, Y. & Kim, H. Network intrusion detection based on novel feature selection model and various recurrent neural networks. Appl. Sci. 9, 1392 (2019).
Ullah, I. & Mahmoud, Q. H. Design and development of RNN anomaly detection model for IoT networks. IEEE Access 10, 62722–62750 (2022).
Wang, H. & Li, W. Ddostc: A transformer-based network attack detection hybrid mechanism in SDN. Sensors 21, 5047 (2021).
Qureshi, A.-u.-H., Larijani, H., Ahmad, J. & Mtetwa, N. A heuristic intrusion detection system for internet-of-things (iot), in Intelligent Computing: Proceedings of the 2019 Computing Conference, Vol. 1, 86–98 (Springer, 2019).
Hassan, M. M., Gumaei, A., Alsanad, A., Alrubaian, M. & Fortino, G. A hybrid deep learning model for efficient intrusion detection in big data environment. Inf. Sci. 513, 386–396 (2020).
Koca, M., Aydin, M. A., Sertbaş, A. & Zaim, A. H. A new distributed anomaly detection approach for log ids management based ondeep learning. Turk. J. Electr. Eng. Comput. Sci. 29, 2486–2501 (2021).
AVCI, İ., Koca, M. & Atasoy, M. Windows tabanlı uygulamalarda sql enjeksiyon siber saldırı senaryosu ve güvenlik önlemleri. avrupa bilim ve teknoloji dergisi (28), 213–219 (2021).
Jing, D. & Chen, H. B. Svm based network intrusion detection for the unsw-nb15 dataset, in 2019 IEEE 13th International Conference on ASIC (ASICON) (2019).
Ingre, B., Yadav, A. & Soni, A. K. Decision Tree Based Intrusion Detection System for nsl-kdd Dataset (Springer, 2017).
Pacheco, J., Benitez, V. H., Filix-Herran, L. C. & Satam, P. Artificial neural networks based intrusion detection system for internet of things fog nodes. IEEE Access 1 (2020).
Meerja, A. J., Ashu, A. & Rajani Kanth, A. Gaussian naïve bayes based intrusion detection system, in Proceedings of the 11th International Conference on Soft Computing and Pattern Recognition (SoCPaR 2019), Vol. 11, 150–156 (Springer, 2021).
Chen, L., Kuang, X., Xu, A., Suo, S. & Yang, Y. A novel network intrusion detection system based on CNN, in 2020 Eighth International Conference on Advanced Cloud and Big Data (CBD), 243–247 (IEEE, 2020).
Nayyar, S., Arora, S. & Singh, M. Recurrent neural network based intrusion detection system, in 2020 International Conference on Communication and Signal Processing (iccsp), 0136–0140 (IEEE, 2020).
de Carvalho Bertoli, G., Junior, L. A. P., Saotome, O. & Dos Santos, A. L. Generalizing intrusion detection for heterogeneous networks: A stacked-unsupervised federated learning approach. Comput. Security 127, 103106 (2023).
Friha, O. et al. Felids: Federated learning-based intrusion detection system for agricultural internet of things. J. Parallel Distrib. Comput. 165, 17–31 (2022).
Ruzafa-Alcázar, P. et al. Intrusion detection based on privacy-preserving federated learning for the industrial IoT. IEEE Trans. Industr. Inf. 19, 1145–1154 (2021).
Vadigi, S., Sethi, K., Mohanty, D., Das, S. P. & Bera, P. Federated reinforcement learning based intrusion detection system using dynamic attention mechanism. J. Inf. Security Appl. 78, 103608 (2023).
Chen, X., Qiu, W., Chen, L., Ma, Y. & Ma, J. Fast and practical intrusion detection system based on federated learning for vanet. Comput. Security 142, 103881 (2024).
Bellman, R. A Markovian decision process. J. Math. Mech. 679–684 (1957).
Haarnoja, T., Zhou, A., Abbeel, P. & Levine, S. Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor, in International Conference on Machine Learning, 1861–1870 (PMLR, 2018).
Hebert, L., Golab, L., Poupart, P. & Cohen, R. Fedformer: Contextual federation with attention in reinforcement learning. arXiv preprint arXiv:2205.13697 (2022).
Mnih, V. et al. Playing atari with deep reinforcement learning. arXiv preprint arXiv:1312.5602 (2013).
Schaul, T., Quan, J., Antonoglou, I. & Silver, D. Prioritized experience replay. arXiv preprint arXiv:1511.05952 (2015).
Nguyen, H. & Kashef, R. Ts-ids: traffic-aware self-supervised learning for IoT network intrusion detection. Knowl.-Based Syst. 279, 110966 (2023).
Zhou, R., Wang, Z., Yang, S., He, D. & Chan, S. Federated learning based on two-stage knowledge distillation for intrusion detection in industrial IoT. Expert Syst. Appl. 130144 (2025).
He, X. et al. Federated continuous learning based on stacked broad learning system assisted by digital twin networks: An incremental learning approach for intrusion detection in UAV networks. IEEE Internet Things J. 10, 19825–19838 (2023).
Funding
This research was funded by the Key Research and Development Program of the Autonomous Region (Grant No.2022B01008), the National Natural Science Foundation of China (Grant No.62262065), the “Tianshan Talent” Research Project of Xinjiang (Grant No.2022TSYCLJ0037).
Author information
Authors and Affiliations
Contributions
Author contribution: Conceptualization, T.M. and W.Y.; methodology, T.M. and S.W.; validation, Y.Y.; investigation, Y.Y. and S.W.; resources, W.Y. and T.M.; writing—original draft preparation, T.M.; writing—review and editing, T.M.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no conflicts of interest.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Ma, T., Yin, Y., Yang, W. et al. A federated transformer-enhanced double Q-network for collaborative intrusion detection. Sci Rep 16, 1919 (2026). https://doi.org/10.1038/s41598-025-31664-0
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-31664-0
