
Abstract
Power losses and voltage deviations in distribution power networks (DPNs) are high since they carry more power demand than transmission power networks. Also, voltage deviation beyond the allowable range causes voltage stability problems in the DPN. The power loss (PL) in the DPN should be kept at the minimum level for the economic operation of the electric grid. Integrating distributed generation (DG) in appropriate sites of the power networks can minimize the power losses and voltage drops. An integrated optimization approach is proposed in this paper, by combining an analytical and metaheuristic algorithm to optimize the placement and sizing of multiple DGs. The active power loss sensitivity (APLS) index is an analytical mathematical computation approach used to identify the optimal bus locations for DG placement. The modified ant lion optimization (MALO) algorithm is applied to optimize the ratings of the DG systems. The MALO algorithm is proposed by adopting the Lévy flights (LF) pattern in the random walk process (RWP). LF representation of RWPs enhances the exploration phase of the ALO algorithm and helps to obtain the near-optimal solution. The proposed integrated approach optimizes multiple units of photovoltaic (PV) and wind turbine (WT) units to minimize the multi-objective function, including AP loss and voltage deviation (VD) minimizations. The effectiveness of the proposed integrated approach is validated on the IEEE 69-bus, 85-bus, and 118-bus radial DPNs. Besides, the simulation study is extended for ant lion optimization (ALO), BAT, and artificial bee colony (ABC) algorithms-based techniques. The integrated approach has reduced the total AP loss of the IEEE 69-bus and 85-bus radial DPN from 225 kW to 70.51 kW and 316.12 kW to 162.80 kW, respectively, for the optimized three PV DG units allocation. Likewise, the total AP loss of the 118-bus radial DPN is cut down from 1296.3 kW to 432.3 kW after the optimized five PV DG units allocation. Meanwhile, the total AP LOSS of the 69-bus, 85-bus, and 118-bus radial DPNs is reduced to 4.78 kW, 53.87 kW, and 112.2 kW, respectively, after the optimized WT DG allocation. Additionally, the optimized inclusion of multiple DG units significantly minimized the VD of the DPNs. The minimum VD of the 69-bus, 85-bus, and 118-bus test systems is reduced from 0.0908 p.u., 0.1297 p.u., and 0.1312 p.u. to 0.0174 p.u., 0.0384 p.u., and 0.0201 p.u., respectively, for the multiple PV unit allocations. Similarly, the minimum VDs of the 69-bus, 85-bus, and 118-bus radial DPNs are minimized to 0.0048 p.u., 0.0190 p.u., and 0.0093 p.u., respectively, following the multiple WT DG unit allocations. The simulation findings of the APLS-MALO integrated approach are related to the various optimization techniques. The comparative study reveals that the proposed integrated approach gives a more effective and efficient solution than ALO, BAT, ABC, and other optimization techniques. Finally, the simulation findings of the APLS-MALO integrated technique are verified via the calculation of conventional statistical metrics and the conduction of a non-parametric Wilcoxon test.
Similar content being viewed by others

Introduction
Recent growth in population and industries has increased the global electrical power demand. Electricity consumers are powered through distribution power networks (DPN). Literature1,2,3 reports that 13% of the total electrical power had been lost as power losses (PL) in the DPN. Also, the large resistance-to-reactance ratio of radial DPN results in more voltage drop (VD) and PL4. The PL and VD further increase as the demand increases. This increase in power demand could lead to abnormal operating conditions such as stability and reliability issues for utilities and consumers. Hence, effective compensation is needed to sort out these problems to ensure safer and more secure operation of the DPN. Many researchers adopted network reconfiguration, capacitors, and distributed generation (DG) placement techniques to reduce PL and VD in the distribution lines. Amongst these several methods, DG placement is assumed to be a wise and efficient choice5.
Various resources, including hydro, fuel cells, solar, and wind, are used as a source of DG units. However, DGs with renewable energy sources (RES) are preferably used by researchers due to their distinctive feature of generating electrical power with minimal environmental pollution emission. The optimal choice of DG’s position and size can significantly cut downs the power loss and reduce the VD. However, the optimal DG integration is a complex and non-linear problem where the misplacement of DG can increase the PL and VD. Therefore, DG’s position and rating in the DPN should be optimized using an efficient methodology. The researchers implemented different meta-heuristic approaches to find the optimal site and quantify the DG capacity. Optimal DG allocation via the manta-ray foraging optimization (MRFO) algorithm has been conducted on radial DPN to minimize line PL6. A multi-objective hybrid optimization (MOHO) technique using binary particle swarm optimization and the shuffled frog leap (BPSO-SLFA) algorithm was invented in7 for optimal DG allocation. Optimal DG allocation by the proposed hybrid technique improved the voltage profile (VP) and reduced the power losses and operating cost. A multi-objective grey wolf optimizer (MOGWO) algorithm has been proposed for the optimal DG inclusion in radial DPN8. The MOGWO solved the multi-objective DG allocation problem for the reactive PL minimization and VP improvement. A mixed particle swarm optimization (MPSO) algorithm was implemented to optimize the DG capacity, reduce network PL, and improve the bus VP9. Optimal DG placement using the artificial bee colony (ABC) algorithm has been conducted on Radial Distribution Systems (RDS)10 for reducing network PL, voltage drop (VD), and total energy cost. A hybrid optimization (HO) technique has been implemented using the grasshopper optimization algorithm (GOA) and the cuckoo search algorithm (CSA) to optimize DG size for minimizing the PL of radial DPN11. A multi-objective bat algorithm (BA) was implemented for DG optimization in RDS12 to minimize the line PL and operating cost and enhance the VP. A multi-objective ant lion optimization (MOALO) technique was implemented in13 for optimal integration of single and multiple DGs in radial DPN to reduce line active PL, improve bus voltage, and enhance voltage stability. Multiple DGs were optimally integrated into a Distribution System (DS) using the improved harris hawks optimizer (IHHO), considering active PL reduction, VP and voltage stability (VS) improvement14. The whale optimization algorithm (WOA) was applied to optimize the multiple units of DG systems for minimizing power losses and annual economic loss15. DG locations and ratings were optimized for PL minimization and annual economic loss reduction. The effectiveness of the WOA technique was assessed on IEEE 33-bus and 69-bus radial DPNs. A hybrid optimization technique using combined power loss sensitivity (CPLS) and the salp swarm algorithm (SSA) was presented16 to optimize PV and WT systems in DPN for voltage enhancement and PL reduction. The proposed hybrid technique performance was validated on IEEE 33-bus and 69-bus radial DPNs. Moreover, the effectiveness of the hybrid technique was assessed for annual load growth. A hybrid technique using analytical and a metaheuristic algorithm was proposed to optimize type I, type II, and type III DG units into the IEEE 33-bus and 69-bus benchmark radial DPNs17. DG locations and ratings were optimized for AP loss and reactive PL minimization. Optimal locations for DGs were located based on loss sensitivity factor (LSF) computation, while the sine cosine algorithm (SCA) was applied to optimize the ratings for DG units. Adaptive PSO and modified gravitational search algorithm (MGSA)-based optimization techniques were applied to optimize DG units in IEEE 69-bus and 85-bus radial DPNs18. The appropriate locations and ratings of single and multiple DG units of different power factors were optimized for PL minimization and stability enhancement. An enhanced GWO algorithm was introduced to optimally allocate DG units along with capacitors and voltage regulators for power minimization19. The performance of enhanced GWO was evaluated on two Egyptian DPNs. An integrated teaching-learning PSO technique was proposed for optimal DG and STATCOM inclusion in radial DPN20. The performance of the integrated technique was tested on the IEEE 33-bus and 52-bus real-time DPN for PL minimization and stability enhancement. The firefly analytical hierarchy algorithm (FAHA) based technique was suggested to determine the optimal sites and sizes for DG units in the large 118-bus radial DPN21. A hybrid technique configuring improved PSO and gravitational search algorithm (GSA) was proposed to solve simultaneous DG and capacitor optimization problems in the 33-bus and 85-bus radial DPNs22. The optimization problem was solved for total apparent power minimization. An optimization technique using the rider optimization algorithm (ROA) was suggested to locate the optimal positions and find the optimal ratings for different renewable energy source DGs, including PV, WT, and biomass, in 33-bus and 69-bus radial DPNs23. DG units were optimized for total PL and energy losses minimization. The proposed technique adopted LSF to locate the candidate buses for the DG placement. A detailed review has been presented in24 considering the different non-traditional methodologies24. An artificial bee colony (ABC) algorithm-based novel technique was proposed for solving the DG placement and sizing problem in radial DPN25. Multiple objectives, including total PL, total energy, and voltage drop minimizations, were considered in this study. Newton-Raphson power flow analysis was used on IEEE 33-bus and 69-bus radial DPNs for power flow calculation. A multi-objective (MO) PSO algorithm was adopted in26 to solve the complex DG placement and sizing problem. The adopted MOPSO technique was tested on the IEEE 33-bus and 69-bus radial DPN. The MATPOWER toolbox was combined with MOPSO to investigate the simulation findings for different scenarios. A real-world practical Tunisian electricity distribution network (ASHTART) was also considered to validate the efficacy of the MOPSO technique. The authors have used a biogeography optimization algorithm (BOA) to obtain a better solution for the optimal DG placement and sizing problem27. The DG units were optimized for AP loss minimization. The LSF and Dwarf Mongoose Optimization (DMO) algorithm integrated technique was proposed for the simultaneous allocation of DG and DSTATCOM in radial DPN28. Multiple objective functions that include PL minimization, VP improvement, and operating cost minimization were considered in the optimal study. The optimal locations for the placement of compensation devices were identified via LSF computation, while optimal ratings were obtained via the DMO algorithm.
The contributions of the several metaheuristic optimization techniques cited in the literature are outlined in Table 1. Most of them solve the DG allocation problem for multiple objectives except6,23. Moreover, the effect of load growth is considered only in9,11, and16, while others disregard this effect and consider constant power demand for validation. Also, the scalability of the optimization technique is tested only in21, and others have not tested their technique’s performance for a larger DPN. Except for8, none of them examined the simulation findings statistically through nonparametric and parametric statistical analysis. However, the literature8 only examines the simulation findings through parametric statistical analysis and ignores nonparametric statistical analysis. Moreover, these metaheuristic techniques often prematurely converge due to the complex nature of the optimization problem and hence do not guarantee the best solution.
Ant lion optimizer (ALO) is a population-based metaheuristic algorithm that simulates the hunting activity between ants and ant lions. ALO has delivered a better performance on several optimization problems such as economic load dispatch (ELD), load forecasting, and load frequency control (LFC). However, like all other metaheuristic algorithms, ALO also tends to fall victim to premature convergence issues. This mainly happened due to improper selection of step size in the random walk process (RWP). Therefore, the proposed study applies a modified ALO (MALO) algorithm by including the Lévy flights (LF) pattern in the RWP. LF is a non-Gaussian random process where stationary increments are distributed as per the Lévy stable distribution29. Eventually, the literature reports improved results for LF representation of RWP30.
The contribution of the proposed study on optimal DG allocation is outlined below.
-
An integrated approach using the APLS index and MALO algorithm is proposed to optimally include multiple units of DG for AP loss minimization and VP improvement.
-
The performance of the integrated approach is investigated for multiple units of PV and WT DG optimization in different DPNs, viz. IEEE 69-bus, 85-bus, and 118-bus radial DPNs.
-
The efficacy of the integrated approach is examined considering 50% load growth on the IEEE 69-bus radial DPN.
-
The simulation findings are validated statistically through conventional metrics calculation and the Wilcoxon test.
The remaining part of this paper is summarized as follows. Section II presents a multi-objective function formulation. Section III explains the APLS index computational procedure and the process of optimal bus identification for multiple DG units. Sections IV and V present the mathematical exhibition for the ALO and MALO algorithms. Section VI discusses the simulation test results. In the end, Section VII concludes the significant contribution of the research outcome.
Multi-objective function framework
The ideal sites and sizes of multiple units of PV and WT systems are optimized for minimizing a multi-objective function (MOF) represented as ‘F’ in Eq. (1). The objectives include AP loss minimization (f1) and VP improvement (f2). The multi-objective function is solved using the weighted sum method (WSM).
where,
AP loss reduction (f1) is the first objective and is achieved by minimizing the power loss index (PLI), which is a ratio that relates the total AP loss in DPN after (Ploss, DG) and before (Ploss) the DG inclusion. The expression for f1 is given in Eq. (3).
VP enhancement is the second objective (f2) and is accomplished by minimizing the voltage deviation index (VDI) expressed in Eq. (4).
Where, V1 is the substation bus voltage equal to 1p.u, and Vi is the node voltage.
Constraints
The optimal solution for the proposed MOF should not violate the following constraints.
Power balance constraint
It’s an inequality constraint that limits the power injection capacity of DG units for safe power flow. The power balance constraint for the multiple DG units’ optimization study is given in Eqs. (5) and (6).
Where, PDG, p, and QDG, p are the optimized DG units’ active power (AP) and reactive power (RP) capacity; Pp and Qp are the DPN’s AP and RP demands.
Voltage constraint
It’s an inequality constraint that helps to limit the bus voltages within the minimum (Vmin) and maximum (Vmax) limits. The voltage constraint for a bus voltage is given in Eq. (7).
DG capacity constraint
The total AP and RP rating of a DG unit must be inside the specified minimum and maximum limits as given in Eqs. (8) and (9).
where, \(P_{{TDG}}^{{\min }}\)and \(P_{{TDG}}^{{\max }}\)are the permissible minimum and maximum AP ratings of DG units, \(Q_{{TDG}}^{{\min }}\) and \(Q_{{TDG}}^{{\max }}\)are the permissible minimum and maximum RP ratings of DG units.
DG modelling
PV and WT systems are modeled as per IEEE 1547 standards31. According to the IEEE 1547 standard recommendation, PV and WT systems can be modelled as unity p.f. units or near-unity p.f. units. In the present study, PV systems are modelled as unity p.f. (P-type) DG units, while WT systems are modelled as PQ-type DG units at 0.866p.f leading.
PV DG model
A typical solar PV system injects real power into the radial DPN. The output power (Ppv) of a solar PV system relies on environmental parameter variations such as solar radiation and temperature. The mathematical expression for the output power of a solar PV system is given in Eq. (10).
where, Ppvr is the rated output power of solar PV units; ‘G’ is the solar radiation received at the selected optimal location in W/m2,; Gr is the rated solar radiation at the earth’s surface in W/m2.
WT DG model
The AP (PW) and RP (QW) output of a WT system are mathematically modeled as in Eqs. (11) and (12).
Where Pwr is the rated output power of WT at the rated speed, v and vr are the actual and rated wind speed (WS) at the selected optimal location, vcin and vcout are the cut-in and cut-out speeds.
Active power loss sensitivity index for DG placement
The suggested integrated approach employs the APLS index to locate the ideal sites for the multiple DG unit placements. APLS index demonstrates the impact of change in AP flow on the DPN power losses. Computation of the APLS index helps to identify the most sensitive part of the DPN prone to higher PL28. Consequently, it cuts down the search space of the optimization problem, making the algorithm concentrate only on the most sensitive part of the DPN. The mathematical expression for the APLS index is given in Eq. (13).
Where ‘Qi+1eff’ is the RP consumed by load and ‘Rk’ is the resistance of a distribution line.
The normalized bus voltage (Vnorm) is also considered alongside the APLS index for the selection of optimal DG sites. Vnorm for the radial DPN is obtained by dividing the node voltage (Vi) with Vmin. Figure 1 illustrates the flowchart for the optimal site selection for DG placement.
Ant lion optimization algorithm: an overview
The ALO algorithm was introduced32 by stimulating the hunting behavior between ants and ant lions to solve the different engineering optimization problems. The ALO algorithm is modelled in five steps as given below.
Random Walk of ants
Ants normally move randomly to find the food. Hence, the movement of ants is modeled as a random walk process (RWP). The mathematical representation for RWP is described in Eq. (14).
where, ‘cums’ refers to a cumulative sum, ‘t’ is an iteration number, and ‘n’ is the total number of iterations.
The ant’s movement is stochastic in nature; hence it is represented using a stochastic function ‘r (t)’ as given in Eq. (15).
where, ‘rand’ denotes a random number.

Flowchart for identification optimal bus locations for DG placement.
Ants normally change their position periodically to search for food. However, ants may go outside the search boundary in search of finding food. Therefore, at times the position of ants must be normalized using Eq. (16).
Where, ‘Xit’ corresponds to an ant’s position, ‘ai’ and ‘bi’ are the minimum and maximum random walk (RW) step size, respectively.
Trapping in ant lions’ traps
The effect of ant lion traps on the movement of ants is described in Eqs. (17) and (18).
Where, ‘Antlionjt’ is the position of ant lion and ‘ct’ and ‘dt’ are the vectors.
Trap building
The ant lion hunts the ants by a building trap. Ant lion creates a trap using a roulette wheel. The roulette wheel picks the ant lions according to fitness values to increase the probability of catching the ants.
Sliding ants toward the ant lion
The ant lion shoots out the sand from the center of the trap to make the ants slide towards the center of the pit. The sliding process of ants is illustrated in Eqs. (19) and (20).
Where, \(I = 10^{W} \frac{t}{T}\), is a ratio, ‘T’ is the total iterations and ‘W’ is a constant.
Catching prey and rebuilding traps
In this process of the algorithm, the ant lion eats the captured ant and rebuilds the trap for the next hunt. This phase of the process is mathematically expressed in Eq. (21).
Elitism
The fittest ant lion is considered the elite solution, and it controls the movement of ants inside every pit. This phase is mathematically modelled in Eq. (22).
where, ‘RAt’ and ‘REt’ are the movements of ants around the ant lion and the elite solution.
Modified ALO algorithm
The ALO algorithm provided feasible solutions for many optimization problems33,34,35,36. However, the improper choice of RW step size causes the ALO algorithm to trap in local optima solutions and premature convergence. Hence, a proper selection of RW step size is essential in the ALO algorithm to achieve the global optimal solution, evading the local optima stagnation. If the step size is small, it becomes inefficient, as this minute variation cannot give practical significance to the optimal solution. Conversely, if the step size is large, the obtained solution might be far from the previous one37. Considering the above problem statement, the MALO algorithm is introduced in this work by incorporating a LF pattern to simulate the RWP to effectively solve the complex multiple DG placement problems. LF defines the RW of ants as a group of scale-free walks. The introduction of LF in the RW process enhances the exploration and exploitation phases of the ALO algorithm and helps to obtain the near-optimal solution. The RW of ants using the Levy distribution function (LDF) is expressed in Eq. (23).
Where, ‘α’ is a step size, and Levy (λ) is a Levy stable distribution function (LSDF).
Where, ‘s’ is the variable and ‘λ’ is an index of LDF, which controls the stability. The mathematical expression for Levy flight function is given in Eq. (25).
Where, ‘δ’ is the shift parameter and ‘γ’ is the scale parameter. The RW step size is found using Eq. (26)
And,
Where, ‘x’ and ‘y’ are the values obtained from the normal distribution and ‘Γ’ is an integral gamma function.
The flowchart for the proposed APLS-MALO algorithm integrated approach is illustrated in Fig. 2. The step-by-step implementation algorithm of the integrated approach is enumerated below.
Implementation algorithm of proposed APLS – MALO technique
-
Step 1.
Read the radial DPNs data.
-
Step 2.
Execute the BFS algorithm load flow technique to compute the fitness value of the MOF and APLS index for all buses of radial DPNs.
-
Step 3.
Find the potential list of buses for multiple DG allocations.
-
Step 4.
Set the population count, maximum iteration count (itmax), and, DG minimum and maximum ratings.
-
Step 5.
Randomize the population size (DG) using Eq. (29).
$$Population = \left( {DG_{{\max }} - DG_{{\min }} } \right)*rand\left( {} \right) + DG_{{\min }}$$(29) -
Step 6.
Run the load flow for the randomly generated population and find the fitness value.
-
Step 7.
Find the solution that results in the minimum fitness value and assign it as the elite solution.
-
Step 8.
Update ant lion position via Eq. (19), Eq. (20), and Eq. (22).
-
Step 9.
Calculate the fitness value for the updated population.
-
Step 10.
If the fitness value is less than the best solution, replace the elite solution. Otherwise, return to step 8.
-
Step 11.
Check stopping criteria. If it is not satisfied, then repeat the process from Step 5.
-
Step 12.
Print the results.
Results and discussion
The simulation study for the different optimization approaches is executed on the IEEE 69-bus, 85-bus, and 118-bus radial DPNs. The necessary codes of programming for different algorithms are implemented in MATLAB 2022a software on an Intel Core i3, 3.7 GHz processor personal computer (PC). The simulation is executed considering the following assumptions.
-
Balanced radial DPN.
-
The stochastic nature of solar radiation and wind speed is neglected.
-
Solar PV and WT are modelled as constant P and PQ sources, respectively.
-
RP injection limit of a solar PV system is neglected.

Flowchart of integrated APLS index and MALO algorithm approach.
The optimization techniques are executed for 50 independent runs to compute the optimal solution. The control parameters of different algorithms are listed in Table 2.
The multi-objective functions of the DG placement and sizing optimization problem are solved using WSM. The appropriate weightage factors (α1 and α2) selection for f1 and f2 are critical to obtaining a better solution. In this work, f1 is given more significance than f2; hence the weightage factor for f1 should be greater than f2. The fitness values of MOF for multiple units of DG systems are computed for the different values for α1 and α2. Table 3 lists the fitness value of MOF for the 69-bus radial DPN with optimized three units of PV DGs. The values of α1 and α2 for which the MOF results in the least fitness value are considered suitable weightage factors. The least fitness value for the MOF is obtained for the case 1 combination, hence values for weightage factors are, α1 = 0.6 and α2 = 0.4.
Power flow study
Power flow studies are vital for finding the bus voltages, AP losses, and RP losses of power system networks under different configurations and operating system conditions. Also, the power flow studies help assess the operating conditions of the radial DPN before and after network reconfiguration. The power flow algorithms such as Gauss Seidal (GS) and Newton Raphson (NR) are not suitable for application in radial DPN due to their poor convergence and inadequate computational efficiency. In radial DPN, the BFS algorithm power flow technique is increasingly adopted to overcome the difficulties of GS and NR load flow methods38. The BFS algorithm has several advantages, including (i) a faster convergence rate, (ii) no need for a Jacobian matrix, and (iii) it does not rely on a PV bus.
BFS algorithm
The BFS algorithm employs two-step computation processes in load flow calculation: (i) forward sweep and (ii) backward sweep. First, the branch currents are computed in the backward sweep. And then the node voltages are computed in the forward sweep.
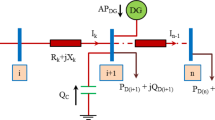
Let ‘Vi’ and ‘Vi+1’ to be the corresponding voltages at nodes ‘i’ and ‘i + 1’, respectively, ‘k’ to be the branch connected between the nodes ‘i’ and ‘i + 1’ with impedance, ‘Zk = Rk + jXk’. The magnitude of current at node ‘i’ is computed using Eq. (30).
Where, ‘Si’ is the apparent power injection in kVA.
The branch current is computed using Eq. (31). This process is initiated from last branch and proceeds towards root node of the radial DPN.
Where, ‘Ii-1,i’ is the branch current. ‘\(\sum {I_{{i,i + 1}} }\)’ is the cumulative branch currents originating from the node ‘i’.
The node voltages (Vi) are calculated in forward sweep using Eq. (32).
Where, ‘Vi-1’ is the voltage magnitude of immediate upstream node ‘i’ and ‘Zi-1,i’ is the branch impedance connected between node ‘i’ and ‘i-1’.
The flowchart illustration of BFS algorithm load flow technique is presented in Fig. 3.

Flowchart of BFS load flow algorithm.
Test system I: IEEE 69-bus radial DPN
The first of three test systems is the IEEE 69-bus DPN39. The single-line diagram (SLD) for the 69-bus radial DPN is presented in Fig. 4. It has 69 nodes, 68 branches, and total AP and RP connected loads of 3800 kW and 2690 kVAr, respectively. The test system uses a 100 MVA and 12.66 kV base system for the power flow calculations. Power flow calculation for the test system without DG placement resulted in 225 kW of AP losses, 102.20 kVAr of RP losses, 0.0908 p.u. minimum VD (VDmin), and a minimum bus voltage (BVmin) of 0.9092 p.u. at bus number 65. Additionally, the APLS index and Vnorm for the 69-bus radial DPN are computed using power flow results and are illustrated in Fig. 5. 21 out of 69 buses are located as the potential buses for DG placement. However, the top three buses with the high APLS index and low Vnorm are considered for the DG placement. The identification of optimal buses via APLS index computation has reduced the search area by 69.56%. The optimized solution for the IEEE 69-bus radial DPN before and after three units of PV and WT placement are presented in Tables 4 and 5, respectively.

IEEE 69 bus radial DPN.
The APLS index and MALO algorithm integrated approach optimizes the three units of PV DGs with 1324.9 kW, 451.6 kW, and 270.3 kW capacities, respectively, at bus locations 61, 17, and 65. The optimized multi-PV systems allocation has curtailed the total AP losses from 225 kW to 70.51 kW and reduced the minimum VD (VDmin) from 0.0908 p.u. to 0.0174 p.u. And the BVmin is improved from 0.9092 p.u. to 0.9826 p.u. Whereas, for the optimized allocation of three units of WT DGs with 1386.2 kVA, 583.9 kVA, and 180.6 kVA capacities, the total AP losses of the test system are decreased to 4.78 kW, and the VDmin is reduced to 0.0048 p.u. The BVmin of the test system is now further enhanced to 0.9952 p.u. The proposed integrated approach has achieved a 68.67% and 96.10% AP loss reduction for the optimized assimilation of three units of PV and WT systems, respectively. The BVmin of the test system has seen a 0.0734 p.u. and 0.086 p.u. improvement from the base value after the PV and WT DG allocations. Likewise, the optimal solutions obtained for the BAT, ALO, and ABC algorithms are presented in Tables 4 and 5. The VP of the IEEE 69-bus radial DPN with and without three units of PV and WT systems is illustrated in Figs. 6 and 7, respectively.
A graphical illustration of the simulation findings of different optimization techniques is presented in Figs. 8 and 9. The illustration demonstrates that the integrated approach has delivered better AP loss reduction and VP improvement than the BAT, ALO, and ABC algorithms.

APLS index and Vnorm of IEEE 69-bus radial DPN.

VP of IEEE 69-bus radial DPN with three units of PV systems.

VP of IEEE 69-bus radial DPN with three units of WT systems.

Statistical comparison of test results for IEEE 69-bus radial DPN with PV systems.

Statistical comparison of test results for IEEE 69-bus radial DPN with WT systems.
The convergence curves for the MALO, BAT, ABC, and ALO algorithms are illustrated in Figs. 10 and 11. The MALO algorithm reached the optimal solution in 65.05 s and 30 iterations for the PV systems allocation and 31 iterations and 75.25 s for the WT systems placement. Similarly, the BAT, ABC, and ALO algorithms have taken 45, 44, and 42 iterations and 86.55, 85.60, and 82.75 s, respectively, for the convergence. Whereas, for the optimized WT systems placement, the BAT, ABC, and ALO algorithms have taken 47, 43, and 41 iterations and 91.80, 89.90, and 86.10 s, respectively, for the convergence. It is inferred that, for both types of DG placement, the MALO algorithm converged with fewer iterations and less CPU time than the BAT, ABC, and ALO algorithms. The convergence characteristics exemplify that the BAT, ABC, and ALO algorithms regularly trapped in local optimal solutions for longer durations, while the MALO algorithm converges smoothly without trapping in local optima solutions.

Convergence curves of different algorithms for IEEE 69-bus DPN with PV systems.

Convergence curves of different algorithms for IEEE 69-bus DPN with WT systems.
Test system II: IEEE 85-bus radial DPN
The second of the three test systems is the IEEE 85-bus radial DPN. The SLD of the 85-bus radial DPN is shown in Fig. 1240. It supplies the electrical power for 85 nodes using 84 branches. The test system without multiple DG allocation has a VDmin of 0.1287 p.u., BVmin of 0.8713 p.u., and total AP losses of 316.12 kW. The APLS index and Vnorm for the IEEE 85-bus radial DPN are illustrated in Fig. 13. Based on APLS index and Vnorm, 71 out of 85 buses are identified as the potential spots for multiple DG placements.

SLD of IEEE 85-bus radial DPN.
The optimal simulation findings of 85-bus radial DPN for the three units of DG allocations are presented in Tables 6 and 7. The power flow calculation for the test system is done for a 100 MVA and 11 kV base system. The AP losses of the IEEE 85-bus radial DPN are minimized from 316.12 kW to 162.80 kW and 53.87 kW following the optimized inclusion of three units of PV and WT DG systems, respectively, by the proposed integrated approach. Simultaneously, the BVmin of the test system is improved from 0.8713 p.u. to 0.9616 p.u., and 0.9810 p.u. after the integration of PV and WT systems, respectively. The variation in VP of IEEE 85-bus radial DPN after integrating multiple PV and WT systems is shown in Figs. 14 and 15, respectively. Also, the simulation findings of the different optimization techniques are graphically presented in Figs. 16 and 17. The summary of results outlined that the APLS-MALO integrated approach has provided maximum AP loss reduction and better VP improvement than the ABC, ALO, and BAT algorithms.

APLS index and normalized voltage of IEEE 85 bus radial DPN.

VP of IEEE 85 bus RDS with multiple PV systems.

VP of IEEE 85 bus RDS with multiple WT systems.

Statistical comparison of test results for IEEE 85 bus radial DPN with PV DGs.

Statistical comparison of test results for IEEE 85 bus radial DPN with WT DGs.
The convergence characteristics of the MALO, ALO, BAT, and ABC algorithms for the 85-bus radial DPN with three units of PV and WT systems are illustrated in Figs. 18 and 19, respectively. The MALO algorithm converges in 83.5 s and 40 iterations for the PV systems allocation and 37 iterations and 89.54 s for the WT systems placement. Moreover, the MALO algorithm reaches the optimal solution in fewer iteration counts and less running time than the other algorithms. This outlines the prominence of the MALO algorithm in locating the global optimal solution to the complex DG allocation problem. Furthermore, MALO evades the local optimal stagnation throughout the convergence, while ALO, ABC, and BAT algorithms often get trapped in local optimal solutions.

Convergence curves of different algorithms for IEEE 85 bus RDS with multiple PV DG units.

Convergence curves different algorithms for IEEE 85 bus RDS with multiple WT DG units.
Test system III: IEEE 118-bus radial DPN
The scalability of the proposed integrated approach is tested for multiple DG placements in large 118-bus radial DPN, besides the IEEE 69-bus and 85-bus benchmark radial DPNs. A single-line diagram of the IEEE 118-bus DPN is shown in Fig. 20. This large RDS has supplied 22709.7 kW and 17041.1 kVAr of real and reactive power, respectively. Simulation findings are obtained for 11 kV and 100 MVA base quantities. Unlike the other test systems, the number of DGs to be optimized is increased from three to five, considering the size of this test system. Power flow execution for the test system without DG placement results in 1296.3 kW of real power losses and 0.8688 p.u. of BVmin. The APLS index and Vnorm for the IEEE 118-bus benchmark radial DPN are illustrated in Fig. 21. It has been found that 50% (59 out of 118) of the test system buses are candidate buses for DG allocation.
Tables 8 and 9 present the simulation findings obtained for optimized multiple (five) PV and WT–DG systems, respectively. Buses 71, 69, 70, 109, and 111 are identified as the candidate locations for DG placement based on the APLS index. For multiple PV–DG allocations, the MALO algorithm converges in 48 iterations and 91 s of CPU time to the optimized ratings of 2562.2 kW, 1922.5 kW, 1689.2 kW, 1966.7 kW, and 2131.3 kW. Total RL of the test system post the PV DGs inclusion is minimized from 1296.3 kW to 432.3 kW, and BVmin is enhanced from 0.8688 p.u. to 0.9799 p.u. Likewise, total PL is cut down to 112.2 kW, and minimum BV is enhanced to 0.9907 p.u. after the optimized allocation of multiple WT DG systems for the ratings of 2671.2 kVA, 2234.5 kVA, 1899.3 kVA, 1777.4 kVA, and 2467.8 kVA. The MALO algorithm converges in 49 iterations for a CPU time of 90 s. The VP of 118-bus radial DPN with and without five units of PV and WT systems is shown in Figs. 22 and 23, respectively. Likewise, Figs. 24 and 25 illustrate the convergence characteristics of different algorithms for the large 118-bus DPN.

SLD of IEEE 118-bus radial DPN.

APLS index and Vnorm of 118-bus radial DPN.

118-bus radial DPN bus voltages with and without PV DGs placement.

118-bus radial DPN bus voltages with and without WT DGs placement.

Convergence characteristics of different algorithms for optimized PV DGs placement in 118-bus DPN.

Convergence characteristics of different algorithms for optimized WT DGs placement in 118-bus DPN.
Comparative analysis
The simulation findings obtained for the integrated APLS-MALO approach are related to those of published results by several optimization techniques. In this section, the simulation findings of the IEEE 69-bus radial DPN are taken for a comparative study. Tables 10 and 11 present the simulation findings of APLS-MALO and other popular optimization techniques for the multiple PV and WT DGs optimized allocation, respectively. In the case of three PV DG units allocation, the proposed integrated approach has produced a 68.67% PL reduction. Also, the minimum BV of the test system has been increased to 0.9826 p.u. It is witnessed from Table 9 that the APLS-MALO integrated approach results for PV DG placement outperformed SCA17, PSO41, FWA43, HSA44, HHO45, and ACSA46 optimization techniques by a significant percentage of PL reduction and per-unit bus voltages. Likewise, APLS-MALO integrated approach simulation findings for three WT DG allocations has achieved better optimal solutions than SCA17, DA42, WOA42, MFO43, and TLBO-GWO44 techniques. Comparatively, optimized WT DG placement has given better PL reduction and bus voltage improvement than PV DG placement since adequate reactive power support is provided by WT systems.
Statistical analysis
The effectiveness of the optimal solution obtained with the proposed optimization technique is evaluated through several statistical tests. In this section, classical statistical metrics and the Wilcoxon test have been incorporated to analyze the performance of the simulation findings.
Classical statistical metrics
Table 12 presents the statistical analysis report for the optimal allocation of three units of solar PV–DG systems in the IEEE 69-bus radial DPN. The statistical analysis is done considering the various metrics such as best, mean, and standard deviation (SD). The MALO-optimized DG placement results in the least SD for the objectives f1 and f2 compared to ALO, ABC, and BAT algorithm optimization. Moreover, the MALO algorithm delivers the best results for both f1 and f2.
Wilcoxon test
The Wilcoxon test (signed rank sum) is one of the non-parametric statistical analysis tests47 conducted to assess the superiority of an optimization algorithm. It tests the null hypothesis of different samples of the same population against an alternative hypothesis. Particularly, it assesses the difference between the two samples of the population.
Consider H0 and H1 to be the null hypothesis and an alternative hypothesis, respectively.
H0: µ0= µa and H1: µ0≠µa.
Where,
µ0 and µa are the mean bus voltages of 69-bus RDS before and after optimized DG allocation, respectively.
Table 13 presents the statistical Wilcoxon test probability (p) for the 69 bus RDS with three PV–DG installations. The present study considers significance level, ϕ = 0.05. The MALO algorithm gives a p-value of 4.1032e-4, which is less than all the other algorithms; also, the null hypothesis is excluded since the p-value is less than 0.05. This statistical analysis justifies that the bus voltages of the 69-bus RDS are significantly improved from the base values after the optimized inclusion of DG units. Furthermore, the MALO algorithm has the least probability value compared with ALO, ABC, BAT, and other algorithms.
Conclusion
The APLS index and MALO algorithm integrated approach have been implemented in this paper to optimize multiple units of PV and WT systems in the different power distribution networks. The DG placement and sizing problem has been framed as a multi-objective function to minimize the total AP loss and enhance the VP of DPNs. Besides the proposed integrated approach, the multi-objective DG allocation problem is solved using different optimization techniques including ALO, BAT, and ABC algorithms. The performance of the optimization techniques has been analyzed for the optimized inclusion of multiple DG units in the IEEE 69-bus, 85-bus, and 118-bus radial DPNs. The APLS index is integrated with all the optimization algorithms to identify the potential list of buses for DG placement. Three units of DG are optimized into the 69-bus and 85-bus radial DPNs, and five units of DG are optimized into the large 118-bus DPN. The optimized allocation of three units of PV systems via the APLS index–MALO integrated approach has reduced the total AP loss of IEEE 69-bus and 85-bus radial DPNs by 68.67% and 48.50%, respectively. Meanwhile, the PL of the 69-bus and 85-bus DPNs has been reduced by 96.10% and 82.95%, respectively, after the three units of WT system placement. Similarly, the PL of the large 118-bus DPN was reduced by 66.65% and 91.34% after the optimized integration of five units of PV and WT systems, respectively. Moreover, the proposed integrated approach has produced higher PL reduction than other optimization techniques studied. In addition to the significant PL reduction, the integrated approach optimized DG unit accommodation has yielded better VP improvement than ALO, BAT, and ABC algorithms. The robustness of the integrated approach has been analyzed by comparing its simulation findings to the other cited results in the literature. The comparison outlined that the proposed APLS-MALO integrated approach achieved a better optimal solution at a considerable convergence rate. Finally, the superiority of the proposed integrated approach has been verified through the computation of statistical metrics and the conduction of the Wilcoxon test.
In the present work, the proposed integrated approach is limited to solving bi-objective problems. However, objective functions corresponding to voltage stability enhancement, operating cost minimization, and emission reduction can be solved in the future assignment. Moreover, the effectiveness of the proposed integrated approach can be assessed on an unbalanced radial DPN and real time DPN as future work.
Data availability
The datasets used and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Lee, S. H. & Grainger, J. J. Optimum placement of fixed and switched capacitors on primary distribution feeders. IEEE Trans. Power Appl. Syst. 100, 345–352 (1981).
Song, Y. H., Wang, G. S., Johns, A. T. & Wang, P. Y. Distribution network reconfiguration for loss reduction using fuzzy controlled evolutionary programming, Proc. Gener. Trans. Distrib. 144, 345–350 (1997).
Singh, K., Yadav, V. K., Padhy, N. P. & Sharma, J. Congestion management considering optimal placement of distributed generator in deregulated power system networks. Electr. Power Compon. Syst. 42, 13–22 (2013).
Federico, J., Gonzalez, V. & Lyra, C. Learning classifiers shape reactive power to decrease losses in power distribution networks. IEEE Power Eng. Soc. General Meet. 1, 557–562 (2005).
Ackermann, T., Andersson, G. & Söder, L. Distributed generation: A definition. Int. J. Electr. Power Syst. Res. 57(3), 195–204 (2001).
Mahmoud, G., Hemeida & Ibrahim, A. A. Optimal allocation of distributed generators DG based manta ray foraging optimization algorithm. Ain Shams Eng. J. 12(1), 609–619 (2021).
Shuaibu Abdurrahman, S., Yanxia & Zenghui, W. Multi-objective for optimal placement and sizing DG units in reducing loss of power and enhancing voltage profile using BPSO-SLFA. Energy Rep. 6, 1581–1589 (2020).
Sultana, U., Khairuddin, B., Mokhtar, A. S., Zareen, N. & Sultana, B. Grey wolf optimizer-based placement and sizing of multiple distributed generation in the distribution system. Energy 111, 525–536 (2016).
Essallah, S. & Khedher, A. Optimization of distribution system operation by network reconfiguration and DG integration using MPSO algorithm. Renew. Energy Focus 34, 37–46 (2020).
Al-Ammar, E. et al. ABC algorithm based optimal sizing and placement of DGs in distribution networks considering multiple objectives. Ain Shams Eng. J. 12(1), 697–708 (2021).
Suresh, M. C. V. & Edward, J. A hybrid algorithm based optimal placement of DG units for loss reduction in the distribution system. Appl. Soft Comput. 91, 1–15 (2020).
Ramprakash, B., Lokeshupta & Sivasubramani, S. Multi-objective bat algorithm for optimal placement and sizing of DG Proc. Natl. Power Syst. Conf. (2018).
Rajakumar, P. & Senthil Kumar, M. Optimal siting and sizing of multiple distributed generation units in radial distribution system using ant lion optimization algorithm. J. Electr. Eng. Technol. 16, 79–89 (2021).
Yoon, K., Choi, D., Lee, S. H. & Park, J. W. Optimal placement algorithm of multiple DGs based on model-free Lyapunov exponent estimation. IEEE Access 8, 135416–135425 (2020).
Prasad, C. H., Subbaramaiah, K. & Sujatha, P. Optimal DG unit placement in distribution networks by multi-objective whale optimization algorithm & its techno-economic analysis. Electr. Power Syst. Res. 214, 108869 (2023).
Abdel-mawgoud, H., Kamel, S., Yu, J. & Jurado, F. Hybrid salp swarm algorithm for integrating renewable distributed energy resources in distribution systems considering annual load growth. J. King Saud Univ. 34(1), 1381–1393 (2022).
Selim, A., Kamel, S., Mohamed, A. A. & Elattar, E. E. Optimal allocation of multiple types of distributed generations in radial distribution systems using a hybrid technique. Sustainability 13(12), 6644 (2021).
Eid, A. Allocation of distributed generations in radial distribution systems using adaptive PSO and modified GSA multi-objective optimizations. Alex. Eng. J. 59(6), 4771–4786 (2020).
Shaheen, A. M. & El-Sehiemy, R. A. Optimal coordinated allocation of distributed generation units/ capacitor banks/ voltage regulators by EGWA. EEE Syst. J. 15(1) , 257–264 (2021).
Ansari, A. & Byalihal, S. C. Application of hybrid TLBO-PSO algorithm for allocation of distributed generation and STATCOM. Indones. J. Electr. Eng. Comput. Sci. 29(1), 38 (2022).
Bujal, N. R., Kadir, A. F. A., Sulaiman, M., Manap, S. & Sulaima, M. F. Firefly analytical hierarchy algorithm for optimal allocation and sizing of DG in distribution network. Int. J. Power Electron. Drive Syst. (IJPEDS) 13(3), 1419 (2022).
Rajendran, A. & Narayanan, K. Optimal multiple installation of DG and capacitor for energy loss reduction and loadability enhancement in the radial distribution network using the hybrid WIPSO–GSA algorithm. Int. J. Ambient Energy. 41 (2), 129–141 (2020).
Khasanov, M., Kamel, S., Rahmann, C., Hasanien, H. M. & Al-Durra, A. Optimal distributed generation and battery energy storage units integration in distribution systems considering power generation uncertainty. IET Gen. Trans. Distrib 15(24) 3400–3422, (2021).
Adegoke, S. A., Sun, Y., Adegoke, A. S. & Ojeniyi, D. Optimal placement of distributed generation to minimize power loss and improve voltage stability. Heliyon 10, 21 (2024).
Essam, A., Al-Ammar, K. & Farzana ABC algorithm based optimal sizing and placement of DGs in distribution networks considering multiple objectives. Ain Shams Eng. J. 12(1), 697–708 (2021).
Raida, S., Farooq, S. & Rafik, N. An improved MOPSO algorithm for optimal sizing & placement of distributed generation: A case study of the Tunisian offshore distribution network (ASHTART). Energy Rep. 8, 6960–6975 (2022).
Valavala, M. Multi-objective optimal siting & location of multiple DGs in distribution network using biogeography based optimization. In IEEE 2nd International Conference on Technology, Engineering, Management for Societal Impact using Marketing, Entrepreneurship and Talent (TEMSMET) 1–5, (2021).
Ferminus Raj, A. & Gnana Saravanan, A. An optimization approach for optimal location & size of DSTATCOM and DG. Appl. Energy 336, 120797 (2023).
Yang, X. S., Deb, S. & He, X. Eagle strategy with flower algorithm, Proceedings of the IEEE international Conference on Advances in Computer, Communications and informatics1213–17, (Mysore, India, 2013).
Mridul Chawla & Duhan, M. Levy flights in metaheuristics optimization algorithms—a review. Appl. Artif. Intell. 32, 802–821 (2018).
Kayal, P. & Chanda, C. Placement of wind and solar based DGs in distribution system for power loss minimization and voltage stability improvement. Int. J. Electr. Power Energy Syst. 53, 795–809 (2013).
Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 83, 80–98 (2015).
Nischal, M. M. & Mehta, S. Optimal load dispatch using ant lion optimization. Int. J. Eng. Res. Appl. 5, 10–19 (2015).
Petrović, M., Petronijevic, J., Mitic, M. & Vuković, N. The ant lion optimization algorithm for flexible process planning. J. Prod. Eng. 18, 65–68 (2015).
Mehta, S. & Nischal, M. M. Ant lion optimization for optimum power generation with valve point effects. Int. J. Res. Appl. Sci. Eng. Technol. 3, 1–6 (2015).
Talatahari, S. Optimum design of skeletal structures using ant lion optimizer. Int. J. Optim. Civil Eng. 6, 13–25 (2016).
Marichelvam, M. K., Prabaharan, T. & Yang, X. S. A discrete firefly algorithm for the multi-objective hybrid flow-shop scheduling problems. IEEE Trans. Evol. Comput. 18 (2), 301–305 (2014).
Haque, M. H. Efficient load flow method for distribution systems with radial or mesh configuration, IEEE Proc. Gen. Trans. Distrib. 143(1), 33–38 (1996).
Rao, R. S., Ravindra, K., Satish & Narasimham, S. V. Power loss minimization in distribution system using network reconfiguration in the presence of distributed generation. IEEE Trans. Power Syst. 28, 317–325 (2013).
Sahoo, N. C. & Prasad, K. A fuzzy genetic approach for network reconfiguration to enhance voltage stability in radial distribution systems. Energy. Conv. Manag. 47, 3288–3306 (2006).
Saleh, A. A., Mohamed, A. A. A., Hemeida, A. M. & Ibrahim, A. A. Comparison of different optimization techniques for optimal allocation of multiple distribution generation. In Proceedings of the International Conference on Innovative Trends in Computer Engineering (ITCE), Aswan, Egypt, 19–21 February, 317–323 ( IEEE: Piscataway, NJ, USA, 2018).
Saleh, A. A., Mohamed, A. A. A. & Hemeida, A. Optimal allocation of distributed generations and capacitor using multi-objective different optimization techniques, In Proceedings of the 2019 International Conference on Innovative Trends in Computer Engineering (ITCE), Aswan, Egypt, 2–4 February 2019, 377–383 (IEEE, Piscataway, NJ, USA, 2019).
Mohamed Imran, A., Kowsalya, M. & Kothari, D. P. A novel integration technique for optimal network reconfiguration and distributed generation placement in power distribution networks. Int. J. Electr. Power Energy Syst. 63, 461–472 (2014).
Rao, R. S., Ravindra, K., Satish, K. & Narasimham, S. V. L. Power loss minimization in distribution system using network reconfiguration in the presence of distributed generation. IEEE Trans. Power Syst. 28, 317–325 (2013).
Selim, A., Kamel, S., Alghamdi, A. S. & Jurado, F. Optimal placement of DGs in distribution system using an improved harris hawks optimizer based on single- and multi-objective approaches. IEEE Access. 8, 52815–52829 (2020).
Nguyen, T. T., Truong, A. V. & Phung, T. A. A novel method based on adaptive cuckoo search for optimal network reconfiguration and distributed generation allocation in distribution network. Int. J. Electr. Power Energy Syst. 78, 801–815 (2016).
Wilcoxon, F. Individual comparisons by ranking methods. Biom Bull. 1 (6), 30–83 (1945).
El-Fergany, A. Optimal allocation of multi-type distributed generators using backtracking search optimization algorithm. Int. J. Electr. Power Energy Syst. 64, 1197–1205 (2015).
Manafi, H., Ghadimi, N., Ojaroudi, M. & Farhadi, P. Optimal placement of distributed generations in radial distribution systems using various PSO and DE algorithms. Elektron Ir. Elektrotechnika. 19 (10), 53–57 (2013).
Acknowledgements
The authors extend their appreciation to the Deanship of Scientific Research at King Khalid University for funding this work under Grant No. RGP 2/347/45. The authors wish to express his sincere thanks to the honorable referees and the editor for their valuable comments and suggestions to improve the quality of the paper. Additionally, all authors would like to express their gratitude to the United Arab Emirates University, Al Ain, UAE, for providing financial support with Grant No. 12R283.
Author information
Authors and Affiliations
Contributions
R.P. : Validation, Visualization, Writing—review & editing. P.M. Balasubramaniam : Writing—original draft, Validation, Methodology, Investigation, Formal analysis, Conceptualization. M.H.A. : Writing—original draft, Methodology, Investigation, Formal analysis, Conceptualization. A.M.: Formal analysis, Methodology, Software, Validation. S.H.S.: Visualization, Validation, Methodology, Investigation, Formal analysis, Conceptualization. S.R. : Investigation, Methodology, Software, Validation, Visualization, Writing—review & editing. M.M.A.: Visualization, Validation, Software, Methodology, Investigation, Formal analysis.Q.M.A.-M. : Software, Validation; Formal analysis, funding.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Rajakumar, P., Balasubramaniam, P.M., Aldulaimi, M.H. et al. An integrated approach using active power loss sensitivity index and modified ant lion optimization algorithm for DG placement in radial power distribution network. Sci Rep 15, 10481 (2025). https://doi.org/10.1038/s41598-025-87774-2
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-87774-2
