
Abstract
Elevation measurement is fundamental to engineering construction and the acquisition of geospatial information, with its accuracy directly impacting project quality and safety. However, traditional high-precision leveling often suffers from low efficiency and operational difficulties in complex terrain. To address this, this study proposes a trigonometric leveling method using a high-precision total station based on the intermediate setup approach. By conducting multiple observation sets of distance and vertical angle, and combining them with trigonometric geometric relationships, elevation differences between control points were calculated. Measurements were carried out across seven control points located in topographically challenging areas. The results demonstrate that when the vertical angle does not exceed 30°, the difference in sight distances is less than 0.5 m, and the sight distance is within 600 m, the accuracy of this method meets the requirements for second-order leveling. This study technically verifies the feasibility of replacing second-order leveling with trigonometric leveling in complex terrain areas. On a practical level, it offers an efficient technical approach for surveying operations, contributing to significantly improved operational efficiency and reduced costs, thereby holding broad potential for application.
Similar content being viewed by others

Introduction
In modern surveying and mapping engineering, height control surveying is a core link for acquiring basic geographic information, and its accuracy and efficiency directly affect the reliability of such work as engineering construction, geological hazard monitoring, and geoid refinement1,2,3. As a traditional benchmark method for high-precision height measurement, second-order leveling can achieve millimeter-level precision in height transfer through strict procedures including round-trip observations and even-numbered station settings4,5,6. The principle of second-order leveling is to determine the height difference between two points by reading the leveling staffs erected at the two points through the horizontal line of sight provided by a level, and then calculate the elevation of the unknown point. The accuracy specifications are: the mean square error of height difference per kilometer is ≤ ± 1.0 mm, and the discrepancy of height difference between forward and backward measurements is ≤ ± 4√L mm (where L is the length of the measured section in kilometers). For a long time, it has maintained an irreplaceable position in the construction of national height control networks and large-scale engineering projects7,8.
However, as surveying tasks extend to complex terrains (e.g., mountainous areas, valleys, and cross-river or cross-sea regions) and efficiency-driven operations (such as emergency mapping and rapid boundary surveys), the limitations of second-order leveling have become increasingly evident9,10,11. First, the operational efficiency is low: multiple stations are required per kilometer, and rugged terrain significantly impedes progress, often reducing daily measurement distances to less than 5 km in mountainous regions1,7. Second, the method incurs high costs, necessitating a specialized leveling team (typically 3–4 personnel) and high-precision instruments (e.g., Leica DNA03, Trimble DINI03), along with supporting equipment such as invar leveling rods and rod shoes, all of which involve considerable procurement and maintenance expenses6,12. Third, the technique exhibits poor terrain adaptability, making it difficult to implement in obstructed areas like steep slopes or water bodies, which not only compromises data continuity but also poses safety risks during operation2,13. Therefore, against the backdrop of continuing infrastructure expansion into complex environments, there is an urgent need to develop elevation transfer methods that balance both accuracy and efficiency in engineering surveying.
In response to the aforementioned challenges, trigonometric leveling has garnered attention due to its flexibility, efficiency, and strong adaptability to complex terrain14,15,16. This method calculates height differences by measuring vertical angles and horizontal distances, incorporating the heights of the instrument and the target prism based on trigonometric principles17,18,19. Among its variants, the intermediate station method serves as an improved approach4,8,11. By setting up the instrument between target points and simultaneously observing both forward and backward sights, it effectively mitigates the effects of Earth curvature and atmospheric refraction14,20. Previous studies have shown that when trigonometric leveling is used to replace second-order leveling, the single sightline length should be controlled within ≤ 50 m. Under this condition, the influences of Earth curvature and atmospheric refraction can be neglected, and the accuracy requirement of ± 1.0 mm/km for second-order leveling can be satisfied21,22. Consequently, this method demonstrates the potential to replace second-order leveling in certain applications. Based on this rationale, the present study proposes the following core scientific hypothesis: under specific operational conditions, such as appropriate distance limits, multiple observation sets, and meteorological controls, the intermediate station trigonometric leveling method can achieve accuracy comparable to that of second-order leveling, while offering significant advantages in terms of efficiency and cost-effectiveness.
Specifically, we hypothesize that by optimizing station layout, implementing multiple sets of synchronous observations, and incorporating real-time meteorological data to establish an atmospheric refraction correction model, the key errors of this method, such as those caused by atmospheric refraction and vertical angle measurements, can be systematically mitigated17,23,24,25. Thereby, both the internal and external consistency accuracy of the height difference measurements, as well as the misclosure, can meet the tolerance requirements stipulated for second-order leveling4,26.
To verify this hypothesis, this study integrates theoretical analysis, numerical simulation, and field validation. First, an error propagation model is employed to quantitatively analyze the influence of various error sources on height difference measurements16,27,28. Subsequently, the Monte Carlo method is used to simulate measurement accuracy under different sight distances, vertical angles, and atmospheric conditions, thereby providing a basis for optimizing field survey parameters29,30. Finally, multiple test sections (including both flat and complex terrain) are established along a closed loop demarcated by first-order leveling10,31. High-precision total stations (e.g., Leica TS60) are used to rigorously collect data under varying meteorological conditions, and the results are compared and evaluated against second-order leveling outcomes14,17,32.
Preliminary experimental results indicate that employing the intermediate station method with 12 round-trip observation sets, under conditions where the horizontal distance does not exceed 600 m (cumulative forward and backward sight distance of 1200 m) and the vertical angle remains below 30°, achieves a mean square error per kilometer of less than \(\:2\sqrt{2}\sigma\:\) (where \(\:\sigma\:\) = 1.0 mm/km)14,33,34. Furthermore, the study revealed that during periods of strong atmospheric turbulence, such as after sunrise and before sunset, the dispersion of observed values increased significantly, highlighting that appropriate selection of observation periods is critical for ensuring measurement accuracy.
In existing studies, Kong et al. (2016) used two automatic tracking total stations for simultaneous reciprocal observations and realized the substitution of second-order leveling by trigonometric leveling22. However, this method imposes strict constraints on observation conditions, with the vertical angle limited to within 10°, resulting in limited terrain applicability. It also does not address complex scenarios such as river crossing, strong atmospheric refraction, and large height differences. Zhang et al. (2019) applied trigonometric leveling to river-crossing scenarios and achieved practical progress using high–low double-prism reciprocal observations. Nevertheless, their work was still limited to meeting second-order leveling accuracy and did not extend the mature scheme to more challenging environments involving large obstacles21.
Different from the above methods, this study employs only one high-precision total station with the multi-round horizon observation method, and the instrument is set midway between two observation segments. This configuration effectively reduces instrumental errors, atmospheric refraction, and earth curvature effects, thereby improving observation accuracy while significantly enhancing operational efficiency and reducing costs. Field tests conducted in high-altitude areas verify that the proposed method meets the accuracy requirements for trigonometric leveling to replace second-order leveling.
This study holds both theoretical and practical significance. Theoretically, it not only validates a technical hypothesis but also systematically establishes a set of precise operational standards and error control procedures for the intermediate station method, thereby providing a foundation for its standardization and normalization. Practically, the proposed method offers a reliable alternative for elevation measurement in complex terrains, which can significantly improve operational efficiency while reducing safety risks and project costs, thereby offering practical value for advancing precision engineering in challenging geographical environments.
Materials and methods
Study area
The Laxiwa Hydropower Station is situated on the main stream of the Yellow River in Laxiwa Town, Guide County, Qinghai Province, serving as the second cascade power station in the segment between Longyang Gorge and Qingtong Gorge. The region features undulating mountains and incised valleys, characterized predominantly by mid-low mountains, hilly grasslands, and high-altitude landforms, with limited fluvial terraces. The terrain slopes from north to south, with elevations ranging between 2,232 and 4,832 m.
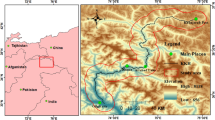
Overall visibility in the reservoir area is moderately favorable; however, the deep canyon topography poses challenges for instrument setup, rendering conventional leveling techniques impractical. Furthermore, the canyon and water surface conditions are prone to inducing multipath effects in satellite positioning, necessitating mitigation strategies during site selection, monumentation, and instrument configuration. It is recommended that the vertical control network be established using precise trigonometric leveling (Fig. 1).

Location map of the Laxiwa Hydropower Station. This figure comprises three panels: the upper left is the administrative map of Qinghai Province; the lower left shows the administrative region of Hainan Tibetan Autonomous Prefecture; and the right panel presents a digital elevation model (DEM) of Guide County. The specific location of the power station is marked by a red dot. This figure was originally created by myself using the open-source software QGIS (version 3.40.7, URL: https://www.gnu.org).
Experimental design
In this study, seven points from the vertical control network of the Laxiwa Hydropower Station were selected for a comparative experiment on elevation measurement. These points are spatially distributed with the shortest and longest inter-point distances being 282.7 m and 543.9 m, respectively. All points are situated above 3100 m in elevation, with limited on-site accessibility (Fig. 2).
Two measurement methods were employed: (1) the intermediate station precise trigonometric leveling method, using a TS60 measurement robot to perform 12 sets of face-left and face-right observations for both distances and angles, while controlling the forward and backward sight distance error to within 0.5 m; and (2) the second-class leveling method with double-run observations, conducted using a Leica DNA03 digital level. Key accuracy specifications of the instruments used in both methods are provided in Table 1.
Trigonometric leveling in this study adopted the full-circle method, with 12 sets of observations in both face-left and face-right positions for high-precision measurement of side lengths and vertical angles. The station was only moved after all indicators passed inspection. The observation time was scheduled between 2 h after sunrise and 2 h before sunset to avoid periods of intense atmospheric turbulence around midday, with cloudy or breezy weather conditions preferred. Leveling was performed using the “back-forward-forward-back” reciprocal leveling method. Prior to daily operations, the instrument was thoroughly checked to ensure its accuracy met the required standards and that it was within the valid calibration period.
Trigonometric leveling was conducted using a total station (TS60) via the mid-station setup method, with 7 stations and 12 observation sets per station (Fig. 2). The instrument-observation point distance was controlled within 600 m, set up and leveled at the midpoint of Points A and B (differential forward-backward sight distance ≤ 0.5 m) in areas with good visibility and no strong refraction. Pre-measurement self-inspection ensured i-angle ≤ 15″ and stable index error; atmospheric correction parameters (temperature, pressure, humidity) were configured. Each set included face-left and face-right measurements with 15° horizontal circle increments, and instrument/prism heights were measured 3 times (mean value, precision 0.1 mm). Precise mode was adopted with automatic compensation, targeting and tracking; observations were repeated if exceeding allowable limits.
For comparison, second-order spirit leveling was performed using the back–front–front–back sequence, covering 9 segments (total length 7.87 km, 362 stations) (Fig. 2). Forward and backward sight distances were approximately equal, with line of sight 0.55–2.80 m above ground. Data was automatically recorded, with immediate remeasurement for over-tolerance sets; round-trip leveling was implemented with station relocation by converting previous forward sight to new backward sight.

Layout of the elevation control network, showing the observation and leveling routes. In the figure, a solid triangle inside a green circle marks an elevation point, while a solid green circle indicates a total station setup location. A green dashed line shows the total station observation route, a solid brown line the leveling route, a blue line the water edge, and a pink line the bridge outline. For each leveling route, reciprocal measurements were carried out, and both the section length and the number of setups were recorded. At every total station setup point, the fore‑sight and back‑sight distances are labeled.
Index and method
Principles and precision analysis of trigonometric leveling
The fundamental principle of trigonometric leveling was employed to determine the height difference between two points. This was calculated based on the vertical angle and the horizontal distance measured between them (Fig. 3), according to the following formula:
Where ℎ12 denotes the height difference between the two points, D is the horizontal distance, \(\:\alpha\:\) is the vertical angle (the inclination angle of the telescope line of sight relative to the horizontal plane), \(\:i\) and v are the instrument and target (prism) heights, respectively, and K and R are the atmospheric refraction coefficient and the mean Earth radius.
The Root Mean Square Error (RMSE) of ℎ12 was derived according to the law of error propagation, yielding the following formula:
where \(\:{m}_{{h}_{12}}\), \(\:{m}_{D}\), \(\:{m}_{\alpha\:}\), \(\:{m}_{i}\), \(\:{m}_{v}\), and \(\:{m}_{k}\) denote the RMSE in height difference, distance, angle, instrument height, target height, and atmospheric refraction coefficient, respectively. The units of \(\:{m}_{{h}_{12}}\), \(\:{m}_{D}\), \(\:{m}_{\alpha\:}\), \(\:{m}_{i}\), \(\:{m}_{v}\), and \(\:{m}_{k}\) are millimeter, millimeter, second, millimeter, millimeter and millimeter, respectively. The value 206,265 is the conversion coefficient between radians and seconds.

Schematic diagram of the trigonometric leveling principle.
Principle and accuracy analysis of trigonometric leveling (intermediate station method)
The fundamental principle of the Intermediate Station Method is as follows: the instrument was set up approximately midway between the two target points, with a sight distance difference of less than 0.5 m. The vertical angles and distances to both points were observed simultaneously to determine the height difference between them (Fig. 4). The calculation formula is as follows:
In the formula, \(\:{h}_{Y1}\) and \(\:{h}_{Y2}\) were the height differences between points 1 and 2 and the instrument center \(\:Y\), respectively; \(\:\alpha\:\) and \(\:\beta\:\) were the corresponding vertical angles; \(\:{D}_{1}\) and \(\:{D}_{2}\) were the corresponding horizontal distances; \(\:{v}_{1}\) and \(\:{v}_{2}\) were the target heights (prism heights) at the two points.
Given that the instrument was positioned midway between the two points and identical prisms were used for synchronous observations, the target heights are identical (\(\:{v}_{1}={v}_{2}\)). Consequently, the height difference between the two points can be derived from Eqs. (3) and (4) as follows:
Based on the error propagation law, the mean error formula for height difference in the equation can be derived as follows:
where \(\:{m}_{{D}_{1}}\) and \(\:{m}_{{D}_{2}}\) denote the mean square errors of distances \(\:{D}_{1}\) and \(\:{D}_{2}\), respectively; and \(\:{m}_{\alpha\:}\) and \(\:{m}_{\beta\:}\) represent the mean square errors of vertical angles \(\:\alpha\:\) and \(\:\beta\:\), respectively.

Schematic diagram of trigonometric leveling by intermediate station method.
Statistical analysis
In this study, the observational data were initially collated and analyzed using Microsoft Excel 2016, and then statistically analyzed with IBM SPSS Statistics 26 (SPSS Inc., USA). Various types of variation graphs were plotted using OriginPro 2024 (OriginLab Corporation, USA), and a digital elevation model (DEM) of the study area was generated with the open-source software QGIS (version 3.40.7).
Results
To ensure the vertical accuracy of trigonometric leveling meets the requirements of second-order leveling, the height difference error of trigonometric leveling should not exceed \(\:2\sqrt{2}\sigma\:\), where \(\:\sigma\:\) denotes the height difference error per kilometer of second-order leveling, with a value of 1.0 mm. Therefore, an error of 2.83 mm per kilometer should be used as the error limit for trigonometric leveling, serving as the basis for accuracy evaluation.
Accuracy analysis of replacing second-order leveling with trigonometric leveling
In reciprocal trigonometric leveling, with the range error of 0.6 mm, angle error of 0.5″, and coefficient of combined curvature and refraction (K-value) of 0.14 (with its error being 0.03), the measurement errors of instrument height and target height were neglected, and the average radius of the Earth was taken as 6370 km. Under these conditions, the variation in the mean error of the height difference obtained from reciprocal observations meets the requirement of second-order leveling, where the mean error per kilometer does not exceed 2.83 mm (Table 2; Fig. 5).
When the horizontal distance \(\:D\) is fixed, the vertical angle \(\:\alpha\:\) exhibits a nonlinear positive correlation with the \(\:{m}_{{h}_{12}}\). Moreover, the growth rate of the \(\:{m}_{{h}_{12}}\) accelerates as \(\:D\) increases. Further analysis reveals that under a constant vertical angle \(\:\alpha\:\), the \(\:{m}_{{h}_{12}}\) increases more significantly with the horizontal distance \(\:D\). In contrast, under a fixed horizontal distance \(\:D\), the increase in the \(\:{m}_{{h}_{12}}\) with the vertical angle \(\:\alpha\:\) is more gradual (Table 2; Fig. 5).
Assessed under different horizontal distances and vertical angles, the measured values of \(\:{m}_{{h}_{12}}\) were as follows: at a horizontal distance of 600 m with a vertical angle of 32.5°, \(\:{m}_{{h}_{12}}\) was 2.25 mm, which was below the tolerance limit of 2.83 mm. When the distance increased to 700 m with the same vertical angle (32.5°), \(\:{m}_{{h}_{12}}\) reached 2.68 mm, still meeting the tolerance requirement. At 800 m with a vertical angle of 25°, M was 2.81 mm, also within the allowable range. However, when the horizontal distance was extended to 900 m with a vertical angle of 0°, \(\:{m}_{{h}_{12}}\) increased to 2.90 mm, exceeding the specified tolerance. The experiments indicated that for a horizontal distance of 700 m, keeping the vertical angle \(\:\alpha\:\) within 30° allowed the trigonometric leveling to meet the accuracy standards for second-class leveling. At 800 m, controlling \(\:\alpha\:\) within 25° also satisfied the requirements. In contrast, once the horizontal distance surpassed 900 m, the value of \(\:{m}_{{h}_{12}}\) exceeded the tolerance limit regardless of the vertical angle (Table 2; Fig. 5).

Distribution Characteristics of Root Mean Square Error (RMSE) in Trigonometric Leveling with Respect to Distance. Subfigures (A) to (I) represent the variation characteristics of the root mean square error (RMSE) of height difference corresponding to observed horizontal distances from 100 m to 900 m (in 100 m increments), respectively.
Accuracy analysis of trigonometric leveling with intermediate station method as a substitute for second-order leveling
In the trigonometric leveling conducted using the intermediate station method, the mean square error of distance was set to 0.6 mm, and the mean square error of angle was set to 0.5″. Since the instrument was placed midway between the two observation points, the condition of equal sight distances in the forward and backward directions could be approximately satisfied. When the same instrument was used for observation, the distance and angle mean square errors were considered identical for both directions. The relationship between the observed vertical angles \(\:\alpha\:\) and \(\:\beta\:\) and the horizontal distance is illustrated in Fig. 6.
Overall, Fig. 6 illustrates the relationship between the vertical angles \(\:\alpha\:\) and \(\:\beta\:\) and the metric \(\:{m}_{{h}_{12}}\) under different horizontal distance conditions. As shown in the subfigures, \(\:{m}_{{h}_{12}}\) varies systematically with changes in \(\:\alpha\:\) and \(\:\beta\:\), and this variation is clearly modulated by the horizontal distance. Moreover, significant differences are observed in both the overall level and fluctuation amplitude of \(\:{m}_{{h}_{12}}\) across the subfigures.
Specifically, at a horizontal distance of 100 m (Fig. 6(A)), for each fixed \(\:\alpha\:\), \(\:{m}_{{h}_{12}}\) increases significantly with the increase in \(\:\beta\:\). The rate of decrease in M with decreasing \(\:\beta\:\) is faster at smaller \(\:\alpha\:\) values, while it becomes more gradual at larger \(\:\alpha\:\) values. When the horizontal distance increases to 200 m (Fig. 6(B)), the increasing trend of \(\:{m}_{{h}_{12}}\) with \(\:\beta\:\) remains evident. The overall \(\:{m}_{{h}_{12}}\) level is slightly higher than that in Fig. 6(A), and the decreasing trends across different \(\:\alpha\:\) values are relatively consistent, although the initial \(\:{m}_{{h}_{12}}\) values are higher at smaller \(\:\beta\:\) values.
With a further increase in horizontal distance to 300 m (Fig. 6(C)), the pattern of \(\:{m}_{{h}_{12}}\) increasing with \(\:\beta\:\) persists. Compared to the previous cases, at smaller \(\:\alpha\:\) values (e.g., \(\:\alpha\:\) = 0°), the initial \(\:{m}_{{h}_{12}}\) values are higher, and the decrease becomes more gradual. At 400 m (Fig. 6(D)), the overall \(\:{m}_{{h}_{12}}\) level rises further. For each fixed \(\:\alpha\:\), \(\:{m}_{{h}_{12}}\) continues to increase with \(\:\beta\:\), and larger \(\:\alpha\:\) values correspond to higher initial \(\:{m}_{{h}_{12}}\) levels and slower decreasing rates.
When the horizontal distance reaches 500 m (Fig. 6(E)), \(\:{m}_{{h}_{12}}\) remains at a relatively high level and gradually increases with \(\:\beta\:\). The extent and rate of decrease in \(\:{m}_{{h}_{12}}\) with varying \(\:\beta\:\) differ among curves with different \(\:\alpha\:\) values, and curves with larger \(\:\alpha\:\) exhibit higher initial \(\:{m}_{{h}_{12}}\) values. Under a horizontal distance of 600 m (Fig. 6(F)), the overall \(\:{m}_{{h}_{12}}\) level is the highest among all six cases. For fixed \(\:\alpha\:\), \(\:{m}_{{h}_{12}}\) increases rapidly with \(\:\beta\:\), and larger \(\:\alpha\:\) values are associated with higher initial \(\:{m}_{{h}_{12}}\) levels and more gradual decreasing trends.
In summary, the vertical angles \(\:\alpha\:\) and \(\:\beta\:\) exert a significant influence on \(\:{m}_{{h}_{12}}\), and this influence exhibits distinct patterns under different horizontal distance conditions, indicating a complex relationship between the vertical angles and \(\:{m}_{{h}_{12}}\).

Variation trends of the measurement error in trigonometric leveling using the intermediate station method under different observation conditions. Subplots (A) to (F) correspond to horizontal distances ranging from 100 m to 600 m (at 100 m intervals), illustrating the relationship between vertical angles \(\:\alpha\:\), \(\:\beta\:\), and the measurement error \(\:{m}_{{h}_{12}}\).
Under the condition of intermediate station trigonometric leveling with an error per kilometer of 2.83 mm, the relationship between vertical angles \(\:\alpha\:\) and \(\:\beta\:\) and their variation trends at different horizontal distances \(\:D\) are shown in Table 3; Fig. 7. Overall, \(\:\beta\:\) gradually decreased as \(\:\alpha\:\) increased, and different values of \(\:D\) had a significant influence on both the initial value of \(\:\beta\:\) and its range of variation.
When the horizontal distance was 100 m (Table 3; Fig. 7(A)), as \(\:\alpha\:\) increased from 0° to 40°, \(\:\beta\:\) decreased slowly from approximately 66.86° to 65.92°, showing a small variation range. At a horizontal distance of 200 m (Table 3; Fig. 7(B)), the initial value of \(\:\beta\:\) dropped to about 61.31°, and as \(\:\alpha\:\) increased, the extent of decrease became more pronounced, eventually reaching 59.78°. Under a horizontal distance of 300 m (Table 3; Fig. 7(C)), the initial \(\:\beta\:\) value further decreased to about 55.81°, with a more evident declining trend as \(\:\alpha\:\) increased; by \(\:\alpha\:\) = 40°, \(\:\beta\:\) reached 52.94°. At a horizontal distance of 400 m (Table 3; Fig. 7(D)), the initial \(\:\beta\:\) value was about 50.24°, and the decreasing trend intensified with increasing \(\:\alpha\:\), especially at larger \(\:\alpha\:\) values, ultimately reducing \(\:\beta\:\) to 44.41°. When the horizontal distance was 500 m (Table 3; Fig. 7(E)), the initial \(\:\beta\:\) was approximately 44.25°, showing a gentle change initially but a sharp decline later, reaching 30.60° at \(\:\alpha\:\) = 40°. At 600 m (Table 3; Fig. 7(F)), the initial \(\:\beta\:\) was about 37.38°, and increasing \(\:\alpha\:\) caused a rapid drop in \(\:\beta\:\), particularly beyond \(\:\alpha\:\) > 20°, until \(\:\beta\:\) reached only 19.60° at \(\:\alpha\:\) = 40°.
In summary, \(\:\alpha\:\) and \(\:\beta\:\) exhibited a negative correlation, meaning \(\:\beta\:\) decreased with increasing \(\:\alpha\:\). The horizontal distance \(\:D\) significantly influenced this relationship: as \(\:D\) increased, the initial value of \(\:\beta\:\) gradually decreased, and the magnitude of decrease in \(\:\beta\:\) with increasing \(\:\alpha\:\) became larger. Under larger \(\:D\) conditions, the decline in \(\:\beta\:\) was more pronounced, indicating that the influence of \(\:\alpha\:\) on \(\:\beta\:\) intensified with increasing \(\:D\).

Relationship between observed vertical angles \(\:\alpha\:\) and \(\:\beta\:\) under different horizontal distances, with an RMSE of 2.83 mm. Subplots (A) to (F) correspond to horizontal distances ranging from 100 m to 600 m in increments of 100 m.
The application of intermediate station trigonometric leveling for the measurement and analysis of regional elevation points
Statistical results of the round-trip height difference discrepancies in trigonometric leveling with an intermediate station
According to the relevant specifications, the round-trip height difference discrepancy must comply with the tolerance of \(\:4\sqrt{L}\) when intermediate-station trigonometric leveling is used to replace second-order leveling, where \(\:L\) is the section length in km35.
Overall, the bar chart illustrates the distribution and discrepancies between the round-trip elevation discrepancy values and their corresponding tolerance limits across different survey segments (N1–N2 to N7–N1). Specifically, the elevation discrepancy values obtained from trigonometric leveling in all segments were lower than their respective tolerance limits. For instance, in segment N4–N5, the elevation discrepancy was only 1.83 mm, substantially lower than the tolerance limit of 3.51 mm. Similarly, in segment N6–N7, the discrepancy measured 1.72 mm, compared to a tolerance of 3.22 mm (Table 4; Fig. 8). Across all segments, the round-trip elevation discrepancies exhibited minimal fluctuation, with values ranging from 1.45 mm to 1.83 mm, all of which remained below their corresponding tolerance limits (Table 4; Fig. 8).

Distribution of round-trip height difference discrepancies in intermediate station trigonometric leveling. DRTHD, discrepancy of round-trip height difference; AD, allowable discrepancy.
RMSE of height differences from intermediate-station trigonometric leveling
In this study, when using the intermediate station trigonometric leveling method to replace second-order leveling, the error in height difference was required to satisfy \(\:\mu\:\sqrt{L}\), where \(\:\mu\:\) represents the total median error per kilometer, taken as 2.83 mm/km, and \(\:L\) is the length of the observation route35. By analyzing the variation in the error of height difference across different elevation points (N1–N7), the performance quality of the trigonometric leveling method was evaluated (Table 5; Fig. 9).
Overall, the errors in height difference at all seven elevation points remained within the specified tolerance. Specifically, the error was lowest at N1 (1.02 mm), then gradually increased at N2 (1.08 mm) and N3 (1.15 mm), reaching a maximum at N4 (1.46 mm). Thereafter, the error decreased gradually to 1.42 mm at N5 and 1.38 mm at N6, with a slight increase to 1.15 mm at N7 (Table 5; Fig. 9).
In summary, both the error in height difference and its tolerance reached their highest values at N4 and were lowest at N1, indicating that the influence on the median error varies across different elevation points.

Distribution of RMSE in height difference from trigonometric leveling using the intermediate station method.
Statistical comparison between intermediate-station trigonometric leveling and second-order leveling
This study conducted a comparative analysis between the intermediate station trigonometric leveling method and the traditional second-order leveling. The intermediate station method involved 7 station setups, covering a total survey line of 3.9 km, and was completed within two days. In contrast, the traditional leveling required 362 station setups, traversed a total length of 8.6 km, and took 23 days to finish. The corresponding results from both methods are presented in Table 6; Fig. 10.
The elevation differences between the two methods at each measurement point (N1–N7) exhibited a discernible pattern. The specific values were − 0.93 mm for N1, -1.36 mm for N2, -1.50 mm for N3, -1.93 mm for N4, -1.65 mm for N5, -0.85 mm for N6, and − 1.49 mm for N7. Among these, point N4 showed the largest absolute elevation difference, while N6 exhibited the smallest (Table 6; Fig. 10). Overall, the elevation differences varied noticeably across the points. The results indicate that the trigonometric leveling measurements were consistently lower than those obtained by leveling across all points, although the overall variation range remained relatively small.

Histogram of differences between trigonometric leveling results with intermediate station method and second-order leveling elevation results.
Discussion
In this study, a robotic total station (model: TS60) was used to conduct trigonometric leveling experiments1,14. This instrument has a distance measurement root mean square error (RMSE) of 0.6 mm and an angle measurement RMSE of 0.5 arcseconds. Within the survey area, the mid-station method was adopted for round-trip observations, with a total of 12 observation sets completed8,34. The results indicate that this method is comparable to second-order geometric leveling in terms of precision, while significantly improving operational efficiency and reducing costs. During the operation, the difference between forward and backward sight distances was controlled within 0.5 m26,36. When both vertical angles (\(\:\alpha\:\) and \(\:\beta\:\)) did not exceed 30° and the forward/backward sight distances were within 600 m (corresponding to a maximum distance of 1200 m between the two points), the RMSE of the obtained height differences met the tolerance requirement of 2.83 mm (Table 3; Figs. 6 and 7)37. Furthermore, this mid-station configuration effectively eliminates the influence of RMSEs from instrument height and target height on the measurement results, thereby further enhancing the precision and reliability of elevation observations.
The mean square error of the trigonometrical leveling height difference primarily originates from uncertainties in several factors, including vertical angle observation, horizontal distance measurement, instrument height measurement, target height measurement, and the refraction coefficient23,32,33. Among these, the observation errors of the vertical angle and horizontal distance are the primary contributors to the total error38,39. Analysis indicates that when the vertical angle is less than 30° and the horizontal distance does not exceed 600 m, the accuracy of the derived height difference can meet the tolerance requirements for second-order leveling (Table 2; Fig. 5). Furthermore, comparing the trends of error variation with respect to different variables reveals that the mean square error of the height difference increases more rapidly with increasing horizontal distance when the vertical angle is fixed40,41. In contrast, the error increases more gradually with an increasing vertical angle when the horizontal distance is held constant, which is consistent with findings from previous studies (Table 2; Fig. 5).
When using instruments of the same model, the intermediate station trigonometric leveling method eliminates the influence of errors in instrument and target heights compared to traditional trigonometric leveling1,13. Over short distances, provided that the forward and backward sight distances are strictly equal, the effects of Earth curvature and atmospheric refraction (i.e., spherical and refraction errors) can be considered negligible21,22,35. Furthermore, the intermediate error of this method is significantly influenced by the horizontal distance \(\:D\) and the vertical angles \(\:\alpha\:\) and \(\:\beta\:\). When the vertical angle remains constant, the error in height difference increases markedly with longer horizontal distances19. In contrast, when the horizontal distance is fixed, the error increases only moderately with larger vertical angles, which aligns with findings from previous studies (Table 3; Figs. 6 and 7)25,40. Additional analysis indicates that a larger horizontal distance \(\:D\) corresponds to a higher initial value of the intermediate error (Table 3; Figs. 6 and 7)3. Therefore, to meet the accuracy standards of second-order leveling, it is recommended to restrict vertical angles to within 30° and horizontal distances to within 600 m when applying the intermediate station method. Under these conditions, the effective observation range of this method can reach nearly twice that of conventional trigonometric leveling, thereby significantly enhancing measurement efficiency without compromising accuracy.
Meanwhile, this study selected seven measurement points and conducted a comparative verification between the intermediate station trigonometric leveling and second-order leveling. The results indicated that the discrepancy between the forward and backward height differences across different segments exhibited minimal overall fluctuation, with values ranging from 1.45 to 1.83 mm, all of which were below the corresponding tolerance limits (Table 4; Fig. 8). This finding suggests that external environmental conditions in the study area had limited influence on measurement errors and also confirms the stability of the instrument performance used in this study10,14,15.
Furthermore, an analysis of the mean square errors at the seven points revealed that the maximum mean square error of height difference and its tolerance occurred at point N4 (1.46 mm), while the minimum was observed at point N1 (1.02 mm) (Table 5; Fig. 9). This variation reflects significant differences in the impact of various elevation points on the mean square error, primarily attributed to the observed horizontal distance and vertical angle40,42. Specifically, point N4 had the largest horizontal distance and elevation, whereas point N1 had the smallest horizontal distance and elevation (Table 5; Fig. 9). This observation aligns with the earlier conclusion that horizontal distance has a more pronounced influence on height difference error4,11.
A further comparison of the results from the two methods showed that the elevation values obtained via intermediate station trigonometric leveling were generally lower than those from second-order leveling, though the overall fluctuation range was limited (Table 6; Fig. 10). This systematic discrepancy can be attributed to two main factors. First, differences in the measurement duration and the number of stations: the intermediate station method required only seven station setups and was completed within two days, whereas second-order leveling involved 362 station setups and took 23 days to complete. The cumulative effect of environmental factors over the extended observation period may have contributed to the observed deviation. Second, simplified error correction: in the intermediate station method, calculations were based on the condition that the difference in sight distances was less than 0.5 m, approximating equal sight distances and thus neglecting the combined effect of Earth curvature and atmospheric refraction1,24,33. Additionally, uncertainties in determining the atmospheric refraction coefficient may have further exacerbated this deviation16,31.
In terms of time savings, cost comparison, and practical deployment feasibility, the trigonometric leveling survey required seven stations and was completed in two days, whereas the second-order leveling survey required 362 stations and took 23 days, representing a reduction in construction time of 21 days and an efficiency increase of approximately 91%. Regarding costs, the trigonometric leveling survey incurred an expense of about 2,000 RMB over two days, while the second-order leveling survey cost approximately 42,000 RMB over 23 days, resulting in savings of roughly 40,000 RMB and a cost reduction of about 95%. In addition, the trigonometric leveling method adopted in this study demands strict station layout, with the forward and backward sight distance difference controlled within 0.5 m, vertical angles not exceeding 30°, and line of sight kept as far as possible within 600 m. Under these conditions, this method can be widely applied in high-precision height measurement scenarios, especially in areas with significant terrain relief where conventional leveling is challenging. It should also be noted that the method is subject to certain constraints related to observation time and weather conditions; measurements should avoid periods of strong atmospheric turbulence around midday, and overcast or low-wind conditions are preferable.
These findings highlight that, in high-precision elevation transfer, the real-time, on-site, and rapid accurate determination of the atmospheric refraction coefficient is a critical technical step for enhancing measurement accuracy and eliminating systematic deviations19,40. Although the theoretical model of intermediate station trigonometric leveling is well-established, its practical application still faces certain limitations. The atmospheric refraction error fails to accurately capture real-time changes in the measurement environment, and in long-distance observations, uncertainty in the variation of the refraction coefficient becomes the primary source of elevation error26,43. Furthermore, the length of the line of sight significantly affects measurement accuracy: as the distance increases, the influence of vertical angle observation errors and atmospheric refraction on height differences is markedly amplified, thereby restricting the method’s applicability for long-range height transfer26,31,43.
This study investigates the feasibility of using trigonometric leveling as an alternative to second-order leveling in high-altitude regions based on seven control points. Due to the limited sample size, this research has certain limitations. In future work, we will further expand the scope of field experiments and increase the number of control points to more comprehensively validate the general applicability of the proposed method.
In addition, this study imposes relatively strict requirements on external observation conditions. The total station should preferably be positioned midway between the two observation points, with the difference between the forward and backward sight distances controlled within 0.5 m. To ensure measurement accuracy, the vertical angle should not exceed 30°, and the sight length should generally be limited to 600 m. This method is highly dependent on instrument precision, observation timing, and climatic conditions.
Therefore, future research should focus on further refining the theoretical model of intermediate station trigonometric leveling, with particular emphasis on developing error correction methods for complex environments. Enhancing real-time modeling of atmospheric refraction errors, together with technological innovation and multi-source data integration, represents a critical pathway for improving the performance of this method. By integrating trigonometric leveling with technologies such as GNSS positioning, inertial navigation, and digital leveling, a complementary integrated measurement system can be established. For instance, using GNSS to obtain high-precision planar positions and initial elevation values, supplemented by trigonometric leveling for accurate local height transfer, can effectively enhance both the efficiency and reliability of the overall measurement process.
Conclusion
In this study, trigonometric leveling with intermediate stations was employed to determine the elevations of seven control networks under complex topographic conditions. A total of 12 round-trip observation sets were conducted, with the foresight and backsight distances controlled within 600 m (resulting in a cumulative observation range of up to 1200 m) and the vertical angles restricted to less than 30°. All observations were performed using a TS60 robotic total station.
The experimental results demonstrate that the height root mean square error (RMSE) achieved by this method is 2.83 mm/km, which meets the accuracy requirements of second-order leveling. Compared with the traditional second-order leveling method, the proposed method significantly improves work efficiency, reducing the construction period from 23 days to 2 days (an efficiency improvement of 91%). Meanwhile, it substantially reduces costs, lowering expenditure from approximately 42,000 yuan to 2,000 yuan (a cost reduction of 95%). In this study, the total station was set up midway between two observation piers, which effectively weakens the influences of refraction and earth curvature, thereby ensuring improved measurement accuracy.
This significant reduction in fieldwork duration minimizes the impact of environmental variations on observation results, thereby enhancing operational efficiency while further ensuring the quality and accuracy of the measurement outcomes.
Data availability
The datasets generated during this study are available from the corresponding author (Weixing Yang; email: 75604366@qq.com) upon reasonable request.
References
Zhao, L. F., Tao, M. W., Xiao, C. S., Guo, Y. B. & Yang, M. H. Visual Guidance-Based Total Station Automatic Measurement Method. LASER Optoelectron. PROGRESS. 62 https://doi.org/10.3788/LOP250629 (2025).
Chen, J. et al. Research on the Composite Surveying Accuracy of Laser Altimetry Data and Stereo Images From the Terrestrial Ecosystem Carbon Monitoring Satellite. Photogramm. Rec. 40 https://doi.org/10.1111/phor.70011 (2025).
Braunová, H., Braun, J., Váchová, H. & Kuric, I. Complex determination of automatic robotic total stations’ measurements’ accuracy in underground spaces and comparison with results on the surface. ACTA Montanist. SLOVACA. 28, 752–764. https://doi.org/10.46544/AMS.v28i3.18 (2023).
Guo, Y. G., Li, Z. C. & Yang, H. Construction of precise three-dimensional engineering control network with total station and laser tracker. J. Appl. GEODESY. 16, 321–329. https://doi.org/10.1515/jag-2021-0021 (2022).
Yang, D. L., Zou, J. G., Shen, Y. W. & Zhu, H. B. Research and Application of Trigonometric Leveling to Replace Precise Leveling. J. Surv. Eng. 147 https://doi.org/10.1061/(ASCE)SU.1943-5428.0000366 (2021).
Kobryn, A. Modelling of the refraction in trigonometric levelling using polynomial transition curves. MEASUREMENT 181 https://doi.org/10.1016/j.measurement.2021.109392 (2021).
Zhou, J. G., Luo, C., Jiang, W. W., Yu, X. Y. & Wang, P. Using UAVs and robotic total stations in determining height differences when crossing obstacles. MEASUREMENT 188 https://doi.org/10.1016/j.measurement.2021.110372 (2022).
Wei, L. H., Zhang, J. Q., Ao, M., Liu, S. J. & Mao, Y. C. High-Precision Trigonometric Leveling Based on Correction with Atmospheric Refraction Coefficient Model. J. Surv. Eng. 148 https://doi.org/10.1061/(ASCE)SU.1943-5428.0000401 (2022).
Wang, Y. B., Wu, X. & Shi, J. J. Elevation correction in the semi-airborne electromagnetic detection based on the adaptive bidirectional Robust Kalman filter. Chin. J. GEOPHYSICS-CHINESE Ed. 68, 3268–3281. https://doi.org/10.6038/cjg2024S0529 (2025).
Arif, M. A. H. et al. Evaluation of Different Digital Elevation Models with Elevation Data. REVUE Int. DE GEOMATIQUE. 34, 691–705. https://doi.org/10.32604/rig.2025.065949 (2025).
Yang, D. L. & Zou, J. G. Precise levelling in crossing river over 5 km using total station and GNSS. Sci. Rep. 11 https://doi.org/10.1038/s41598-021-86929-1 (2021).
Pehlivan, H. Identification of structural displacements utilizing concurrent robotic total station and GNSS measurements. SMART Struct. Syst. 30, 411–420. https://doi.org/10.12989/sss.2022.30.4.411 (2022).
Zhou, J. G., Gao, H., Xiao, W. & Peng, D. Water level measurement for reservoir dams with robotic total station during displacements monitoring. Eng. Res. EXPRESS. 6 https://doi.org/10.1088/2631-8695/ad52ed (2024).
Zhan, Y. H., Zhang, C., Zhou, W. L., Chen, S. J. & Li, X. X. Theory and precision analysis of astrogeodetic vertical deflection determination using an imaging total station. J. Geodesy. 99 https://doi.org/10.1007/s00190-025-01940-y (2025).
Yang, W. X., Li, T. T., Wen, B. & Miao, Z. X. Correlation analysis and comprehensive evaluation of dam safety monitoring at Silin hydropower station. Sci. Rep. 15 https://doi.org/10.1038/s41598-025-15094-6 (2025).
Li, B. B. et al. A high-quality global elevation control point dataset from ICESat-2 altimeter data. Int. J. Digit. Earth. 17 https://doi.org/10.1080/17538947.2024.2361724 (2024).
Dammert, L., Thalmann, T., Monetti, D., Neuner, H. B. & Mandlburger, G. A Review on UAS Trajectory Estimation Using Decentralized Multi-Sensor Systems Based on Robotic Total Stations. SENSORS 25 https://doi.org/10.3390/s25133838 (2025).
Beltramone, L., Rindinella, A., Vanneschi, C. & Salvini, R. Multitemporal Monitoring of Rocky Walls Using Robotic Total Station Surveying and Persistent Scatterer Interferometry. REMOTE Sens. 16 https://doi.org/10.3390/rs16203848 (2024).
Liang, S. H., Zhang, C. Y., Jiang, T. & Wang, W. Research and Evaluation on Dynamic Maintenance of an Elevation Datum Based on CORS Network Deformation. REMOTE Sens. 15 https://doi.org/10.3390/rs15112935 (2023).
Simas, H., Di Gregorio, R., Simoni, R. & Gatti, M. Parallel Pointing Systems Suitable for Robotic Total Stations: Selection, Dimensional Synthesis, and Accuracy Analysis. MACHINES 12, (2024). https://doi.org/10.3390/machines12010054
Zhang, H., Hu, B. & Yuan, C. Z. Research and application of precise trigonometric leveling to replace second-class leveling achieving river-crossing leveling. Bull. Surveying Mapp. 11, 121–125. https://doi.org/10.13474/j.cnki.11-2246.2019.0364 (2019).
Kong, N., Lin, H., Ou, H. P., Liu, Y. G. & Luo, F. Research and application of precise trigonometric leveling to replace second-order leveling based on intelligent total station. Bull. Surveying Mapp. 2, 107–109. https://doi.org/10.13474/j.cnki.11-2246.2016.0062 (2016).
Yang, W. X., Li, T. T., Wen, B. & Ren, Y. Correlation cluster analysis of slope safety monitoring data in reservoir areas. PLOS ONE. 20 https://doi.org/10.1371/journal.pone.0324604 (2025).
Xing, Y. B. et al. High-precision spatial measurement method of accelerator pre-alignment based on multiple total stations. Meas. Sci. Technol. 36 https://doi.org/10.1088/1361-6501/ad8595 (2025).
Vivero, S. & Lambiel, C. Annual surface elevation changes of rock glaciers and their geomorphological significance: Examples from the Swiss Alps. GEOMORPHOLOGY 467 https://doi.org/10.1016/j.geomorph.2024.109487 (2024).
Cheng, Z. J., Wang, H. G., Han, L. Y., Du, B. H. & Shi, Z. Y. An improved total station measurement method for the georeferenced orientation of self-propelled artillery barrel. MEASUREMENT 198 https://doi.org/10.1016/j.measurement.2022.111376 (2022).
Reyes-Aviles, F., Gloor, T. & Arth, C. Automatic Model-Based Stationing: Robust Total Station Localization Without Known Control Points. JOURNAL OF INTELLIGENT ROBOTIC Syst. 111, doi:https://doi.org/10.1007/s10846-025-02224-5 (2025).
Pinton, D., Canestrelli, A., Moon, R. & Wilkinson, B. Estimating Ground Elevation in Coastal Dunes from High-Resolution UAV-LIDAR Point Clouds and Photogrammetry. REMOTE Sens. 15 https://doi.org/10.3390/rs15010226 (2023).
Magnaval, G., Colette, T. & Boumeshal, M. in EUROPEAN WORKSHOP ON STRUCTURAL HEALTH MONITORING (EWSHM 2022), VOL 2 51–58 (2023).
D’Emilia, G., Chiominto, L., Gaspari, A. & Natale, E. & Ieee. in 2023 IEEE INTERNATIONAL INSTRUMENTATION AND MEASUREMENT TECHNOLOGY CONFERENCE, I2MTC (2023).
Xing, Y. B. et al. High-precision and high-efficiency measurement method of accelerator tunnel control network based on total station angle observation. Meas. Sci. Technol. 35 https://doi.org/10.1088/1361-6501/ad080d (2024).
Noji, K., Koutaki, G. & Noguchi, S. Camera-LiDAR Calibration Using Total Station. IEEE ACCESS. 13, 98309–98321. https://doi.org/10.1109/ACCESS.2025.3576446 (2025).
Dammert, L., Thalmann, T., Monetti, D., Neuner, H. & Mandlburger, G. Numerical simulation and sensitivity analysis of UAS trajectory determination with robotic total stations. Surv. Rev. https://doi.org/10.1080/00396265.2025.2517540 (2025).
Zschiesche, K. Image Assisted Total Stations for Structural Health Monitoring-A Review. GEOMATICS 2, 1–16. https://doi.org/10.3390/geomatics2010001 (2022).
State Administration of Quality Supervision, I. Quarantine of the People’s Republic of, C. & Standardization Administration of, C. in GB/T 12897 – 2006 (China Standards, 2006).
Paraforos, D. S., Sharipov, G. M., Heiss, A. & Griepentrog, H. W. Position Accuracy Assessment of a UAV-Mounted Sequoia+ Multispectral Camera Using a Robotic Total Station. AGRICULTURE-BASEL 12 https://doi.org/10.3390/agriculture12060885 (2022).
Barman, G. & Sagar, B. S. D. Generation of High Spatial Resolution Terrestrial Surface From Low Spatial Resolution Elevation Contour Maps via Hierarchical Computation of Median Elevation Regions. IEEE Trans. Geosci. Remote Sens. 61 https://doi.org/10.1109/TGRS.2023.3335120 (2023).
Loo, B. P. Y. & Wang, H. Dynamics of in-station time within metro systems: Measurement and determining factors. Tunn. Undergr. Space Technol. 153 https://doi.org/10.1016/j.tust.2024.106006 (2024).
He, Y. Q. et al. Validation of ICESat-2 Elevation Accuracy in Antarctica Using CCR Arrays. IEEE Trans. Geosci. Remote Sens. 62 https://doi.org/10.1109/TGRS.2024.3386781 (2024).
Covián, E., Puente, Casero, M. & Suárez, P. C. Uncertainties estimation in surveying measurands: application to volumes. Meas. Sci. Technol. 35 https://doi.org/10.1088/1361-6501/ad1803 (2024).
Pickett, R. A. et al. Small Unmanned Aircraft Systems and Agro-Terrestrial Surveys Comparison for Generating Digital Elevation Surfaces for Irrigation and Precision Grading. DRONES 7, (2023). https://doi.org/10.3390/drones7110649
Li, B. B. et al. DEM Elevation Correction Model Using ICESat-2 Laser Altimetry Data. IEEE Trans. Geosci. Remote Sens. 61, doi:https://doi.org/10.1109/TGRS.2023.3321956 (2023).
Cai, Y. H. et al. Generative Elevation Inpainting: An Efficient Completion Method for Generating High-Resolution Antarctic Bed Topography. IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING 61, (2023). https://doi.org/10.1109/TGRS.2023.3303231
Funding
No funding was received for this study.
Author information
Authors and Affiliations
Contributions
Y. conceived the study and designed the experiments. L. performed the experiments and collected the data. X. analyzed the data and interpreted the results. Y. wrote the main manuscript text. L. prepared Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9 and 10. X. prepared Tables 1, 2, 3, 4, 5 and 6. All authors reviewed and revised the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Yang, W., Li, T. & Xu, J. The intermediate station trigonometric leveling method for replacing second-order leveling in complex terrain. Sci Rep 16, 17415 (2026). https://doi.org/10.1038/s41598-026-49017-w
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-026-49017-w
