
Abstract
Earthquake doublets defy typical aftershock patterns, challenging seismic hazard assessment. Understanding their rupture dynamics and interactions is crucial for advancing earthquake forecasting and hazard analysis. The destructive February 6, 2023, earthquake doublet of magnitudes 7.8 and 7.6 rocked south-central Türkiye and northwestern Syria. Here, we investigate ground motion characteristics through dynamic rupture modeling, revealing intricate rupture evolution driven by a 3D complex fault system and a rotational stress regime. Our models, validated by interferometric synthetic aperture radar, global navigation satellite system, local strong motion, and teleseismic data, reliably reproduce the observed shaking. Synthetic ground motions show directivity-driven amplification during subshear rupture, whereas supershear rupture elevates ground-motion levels off the fault but mitigates directivity amplification. Ground-shaking patterns are further affected by 3D Earth structure and topographic effects, and exhibit distance-decaying peak-ground velocity (1 Hz resolution) consistent with observations and empirical expectations. Our results highlight the value of integrating physics-based rupture simulations to enhance seismic hazard assessment.
Similar content being viewed by others


Introduction
On February 6, 2023, the magnitude Mw 7.8 and Mw 7.6 Türkiye Kahramanmaraş earthquake doublet broke the southwest section of the East Anatolian Fault (EAF) and struck the southeastern parts of Türkiye and northern Syria1,2, resulting in more than 55,000 fatalities and many more being displaced3. The first event started on the Narli fault, a splay fault to the EAF, then triggered the EAF in bilateral directions, rupturing ~350 km fault length and resulted in a highly damaging Mw 7.8 earthquake. Approximately 9 h later, the second event initiated ~90 km north of the Mw 7.8 epicenter, occurring on the Sürgü-Misis fault (SMF) and ruptured bilaterally, generating a Mw 7.6 earthquake. Like previous earthquake doublets in diverse tectonic settings worldwide4,5,6, the Kahramanmaraş earthquake doublet disobeys general aftershock evolution laws, such as the Omori-Utsu law7 for the temporal distribution, or the Gutenberg–Richter law8 for the magnitude–frequency distribution9. The atypical occurrence of earthquake doublets poses a challenge to earthquake rupture forecasts, aggravating local and regional seismic damages, and complicating seismic hazard assessment.
The EAF represents the plate boundary between the Arabian and Anatolian plates, with a varying slip rate that systematically increases from ~2.5 mm/yr in the southwest to ~10 mm/yr in the northeast10,11. Multiple historic large earthquakes have occurred on this active plate boundary12 (Fig. 1a). However, its western and southern portions have not hosted large earthquakes for more than one century12. The most recent large earthquake, the 2020 Mw 6.8 Elazig earthquake13 just broke the western central EAF but did not cascade further to the southwestern segment. To the north, the SMF that hosted the second Mw 7.6 event, has been seismically silent even longer, with the last large earthquake (M > 7) in 154414 (Fig. 1). This longer return period may arise from the fact that SMF accommodates only 1/3 of the plate motion, lower than the 2/3 slip rate accommodated by the EAF10.

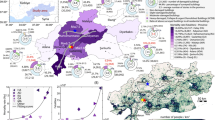
a Regional seismotectonic background. The black solid thick lines show the mapped fault traces, with the red lines indicating the ruptured fault segments during the earthquake doublet, inferred from the inset InSAR result (inset figure, East–West displacement1). The two red stars mark the epicenters of the Mw 7.8 and Mw 7.6 earthquakes, associated with their corresponding focal mechanisms. The light brown shaded areas show the inferred rupture areas of historic large earthquakes12. Black squares mark major cities in the region. b Aftershocks constrained fault geometry. Colored dots represent relocated aftershocks21, with the corresponding color indicating their depths. The inset shows the dip angle variation of the ruptured fault segments and arrows demonstrate their dip directions. c 3D rendering of the relative prestress ratio R, modulated by complex fault geometry and ambient stress, see details in Methods and Figs. S1 and S2.
Geometric complexities, such as fault bends, segmentations, branches, step-overs, and heterogeneous prestress loading control rupture dynamics, slip distribution, and the final rupture extent in a fault system15,16,17. The Kahramanmaraş earthquake doublet shows multi-segment fault rupture cascading through the main fault strands of the EAF and the SMF, and some nearby splay faults, characterized with a multi-phase rupture process associated with rupture branching and asymmetrically bilateral ruptures, relatively shallow and segmented asperities of large slip, sustained and unsustained supershear ruptures2,3,18,19. The complex rupture process results in episodes of high-frequency radiation, locally elevated ground motions, and aftershock clusters1,20,21.
Using the data-integrated complex geometric and stress model, our 3-D dynamic model reveals the multi-segment rupture dynamics and explains aftershocks distribution of the destructive Kahramanmaraş earthquake doublet. Our simulation results quantitatively explain the observed interferometric synthetic aperture radar (InSAR) and global navigation satellite system data, regional and teleseismic waveforms. Furthermore, the resultant synthetic ground motions (peak ground velocity (PGV)) not only display heterogeneous patterns and localized amplification but also demonstrate an average distance–decay pattern consistent with local observations. Our findings indicate dynamic rupture models can serve as a complement to improve seismic hazard assessment and alleviation.
Results and discussion
Complex fault model
The 2023 Türkiye Kahramanmaraş earthquake doublet ruptured a complex, multi-segment fault network that forms part of the triple junction of the Anatolian, Arabian, and African plates (Fig. 1). The triple junction between transform faults is generally unstable and requires multiple faults to accommodate the deformation22. As shown in Fig. 1a, a complex fault network has been identified in this region. The processed InSAR image1 clearly delineates several segments that ruptured in the Kahramanmaraş earthquake doublet, including multi-oriented segments of the EAF and SMF and some branch segments (Fig. 1).
In addition to the complex change of fault orientation of the main fault strands (EAF and SMF) and their splay faults (Figs. 1 and S1), the fault geometry also shows notable depth variations3,23,24. The relocated aftershocks21 demonstrate a lateral change of seismogenic depth. On the Narli fault, the aftershocks distribute deeper from the southwest to the northeast (Fig. 1b). Aftershocks also occur at greater depths on the Pazarcik segment near the intersection with the Narli fault, and gradually become shallower towards the west and east. Another deep aftershocks patch locates on the central Erkenek segment. The deeper locking depth may correspond to higher stress asperities, in agreement with fault slip inversion1,3.
The complex tectonic settings yield not only a complex fault network but also varying regional stress orientations. The relative motion between the Arabian and the Anatolian Plates results in a clockwise rotation of the maximum compressive stress (σ1) along the EAF from the southwest to northeast in the study region25. The paleostress analysis in the central EAF, at and beyond the eastern rupture edge of the first Mw 7.8 event, indicates that the maximum compressive stress rotates from NW-SE before the middle miocene to N–S in the pliocene to current NNE-SSW26. Stress inversions from instrument earthquakes focal mechanism solutions indicate a clockwise rotation of σ1 from the Pazarcik segment to the Erkenek segment27. To the north, σ1 becomes more horizontal and also shows rotation along the SMF18,28.
The processed InSAR data1 shows overall dominant left-lateral strike-slip motion, but also demonstrates substantial vertical motions, especially for the second Mw 7.6 event. There are up to ~2 m downward and ~1.2 m uplift motion in the dip direction, at the Göksun segment and Maraş segment, respectively. This is in contrast to a pure strike slip faulting, as left-lateral slipping would result in compression (uplift) in the dip direction of Göksun segment and extension (sink) in the Maraş segment (Fig. S3). Previous seismicity analysis shows predominantly left-lateral strike-slip faulting mechanisms in the region, accompanied by clusters of localized thrust and normal faulting events29. This is consistent with the central moment tensor (CMT) inversions of aftershocks30, which indicate normal and thrust faulting motion in the Göksun and Maraş segment, while in general left-lateral strike slip motion occurs over the ruptured fault system.
Integrating the seismotectonic background, and analyses of the geodetic and aftershock observations, we determine a complex geometric and prestressed model for dynamic modeling of the 2023 Kahramanmaraş earthquake doublet (Figs. 1c and S2). This model accounts for previously overlooked complexities, including detailed dip angle variations, seismogenic depth differences, and focal mechanism diversity across ruptured faults, all of which can influence the spatiotemporal dynamics of rupture processes and the resultant ground motions31. We then conduct high-performance computing-enabled dynamic rupture simulations, embedded in a combined 3D32 and 1D33 velocity model (Fig. S4), to explore effects of the model complexity and velocity structure on the rupture evolution and resulting ground motions.
Rupture dynamics and fault interactions
The destructive earthquake doublet ruptured a geometrically complex fault network embedded in a heterogeneous and rotational stress regime, with multiple fault segments characterized by varying trending and dips, kinks, bends, and seismogenic depths34. This results in distinct prestress loading and leads to complex rupture dynamics.
The Mw 7.8 event was initiated on the northeast–southwest trending Narli fault, propagated to the northeast, and reached the intersection with the EAF (Pazarcik segment) at ~11.6 s (Fig. 2a and Video S1). The rupture then continued unilaterally to the east along the EAF. A few seconds later, the rupture in the west of the intersection was activated and propagated backward to the southwest. The rupture to the northeast then bifurcated onto the Yabaşi and Erkenek segments and terminated after ~60 s, while the southwest direction rupture continued on the Amonos segment until ~78 s. The deeper seismogenic depth and higher prestress resulted in two large slip patches on the Pazarcik segment around the intersection with Narli fault and on the Erkenek segment, with peak slip reaching ~9 m and ~7 m, respectively. This scenario ruptured ~350 km total length, with an average stress drop of 4.9 MPa and average slip of 3.9 m over the ruptured faults (filtered with fault slip threshold ≥ 0.1 m). It released about 6.24 × 106 Jm—2 fracture energy and generated a Mw 7.85 scenario (Fig. 2).

a Snapshots of the absolute slip rate and surface wavefield, highlighting the complex rupture process for the first Mw 7.8 event, at rupture times of 5, 12, 15, 30, 50, and 65 s. The labels indicate noteworthy features of the rupture. Black circles mark the hypocenter location. b Snapshots of the absolute slip rate and surface wavefield, highlighting the complex rupture process for the second Mw 7.6 event, at rupture times of 2, 5, 9, 12, 15, and 22 s. c The final fault slip, rupture velocity, and stress drop over the ruptured fault segments (filtered with fault slip threshold ≥0.1 m), shown in the top, middle, and bottom panels, respectively. d Normalized moment rate functions (MRFs), obtained in this study and previously derived1,2,18,67. Blue lines represent MRFs obtained through kinematic inversion, while the other lines are from dynamic simulations. The top and bottom panels show the MRFs for the first and second events, respectively. The magnitude for each case is indicated in the legend.
The northeastward direct rupture and delayed southwestward back-propagation along the EAF as slip on the Narli fault reaches the intersection, is governed by the local fault geometry and prestress conditions15,35. The left lateral slip on the Narli fault yields asymmetric Coulomb stress change in the east (increase of up to ~6.7 MPa) and west (decrease of up to ~5.3 MPa) Pazarcik segment of the intersection, respectively (Fig. S5), and thereby favor triggering in rupture-forward direction to the northeast EAF but impeding southwest branching. Rupture on the eastern Pazarcik segment continuously increases the left-lateral shear stress on the western section. When it reaches the yielding stress, it triggers the delayed rupture to the southwest. Multiple numerical tests indicate that forward rupture on the Pazarcik segment is a prerequisite for the backward southwest rupture36. Additionally, higher prestress on the Pazarcik segment results in a shorter delay for the initiation of the backward rupture (Fig. S6). This asymmetric rupture evolution also results in a distinct change in slip pattern on the opposite side, with a larger slip on the east of the intersection (Fig. S7).
About 9 h later, the second earthquake started, reaching eventually Mw 7.6. It initiated at the center of the Çardak segment, with a positively static Coulomb stress change (0.25 MPa) that resulted from the first event (Fig. S8). It propagated bilaterally in East-West direction, with asymmetric rupture speed. The rupture to the west broke a more optimal prestressed segment (Fig. 1c) and the rupture velocity quickly transited from subshear to supershear1,2,18, accompanied by a Mach-wave cone (Fig. 2b and Video S2), and supershear persisted to the western edge. The eastern segment of the Çardak fault was less prestressed and more geometrically complex. The rupture generally remained subshear, except at the intersection between the Çardak and Maraş segments, where localized supershear occurred at shallow depth due to the free-surface effect37 (Video S2). At ~12 s, the rupture to the west also triggered the Yeşilköy branch that is nearly perpendicular to the Çardak segment. The moment rate release reached the peak at ~14 s, as rupture broke bilaterally on the Sürgü fault (SF) and simultaneously on the Yeşilköy branch. The large slip patch was centered on the Çardak fault, with the peak slip of ~9.2 m and higher shallow slip than the first Mw 7.8 event1,3,20,24. The overall rupture lasted for about 28 s, broke through ~165 km fault length with an average stress drop of 5.6 MPa and average slip of 4.3 m. It released approximately 8.06 × 106 Jm−2 fracture energy and generated a Mw 7.66 earthquake.
The occurrence and localization of supershear rupture during the first event remain subjects of ongoing debate19,30,34,38. Our dynamic modeling shows that for the first Mw 7.8 event, supershear rupture is not necessarily needed to trigger the EAF, consistent with previous studies18,36. The Mw 7.8 event shows overall subshear rupture propagation1,2,23, with localized and unsustained supershear rupture at fault intersections or geometric bends16,18. It has been suggested that geometrically simple faults with relatively homogeneous fault strength are favorable for supershear rupture39,40. The EAF is found to be a relatively immature fault system that developed for 2–5 Ma41 and is characterized by multi-scale geometrical complexities, such as fault bends and stepovers, that are generally unfavorable for supershear rupture42. In contrast, sustained supershear rupture is observed in the western SF during the second Mw 7.6 event. This segment is relatively smooth, in an optimal stress orientation, and the long seismic quite period since the last large earthquakes in 154412 of the SMF results in higher prestress loading and thus is more prone to develop supershear rupture.
Physics-based surface displacement and ground motions
The synthetic seismic waveforms and ground displacements of our data-constrained dynamic rupture models match well with both the geodetic and seismic observations (Figs. S9 and S10). Both the synthetic and observed surface displacement show dominant left-lateral motion1,24, with peak fault-parallel offset reaching 7.5 m in the Çardak segment1 for the Mw 7.6 event. In addition to a good match with the horizontal displacement in both directions and amplitude (Figs. S9 and S10), the synthetic data also well reproduce the vertical displacement pattern. A noticeable subsidence at the Göksun segment and uplift at the Maraş segment in the downdip direction reflect the partially normal and thrust slip in addition to the dominating strike slip30. Our synthetic waveforms overall match both the timing and amplitude of the local/regional and teleseismic recordings (Figs. S10–S14), except a time delay of ~9 s in the synthetic arrival time in strong motion station 0213 for both events, which may be due to a clock error at the station in addition to the specific local velocity structure not captured in the velocity model used in our study.
Our dynamic models, using data-constrained complex geometry and prestress loading, produce complex ground motion patterns and heterogeneous distribution along, across, and off the ruptured fault segments (Fig. 3). Due to the globally limited frequency resolution around 1 Hz (see details in Methods), we analyze the PGV, as it is less sensitive to high-frequency components compared to peak ground acceleration. The geometrical complexities, like fault bends43, intensify the locality ground motion. Furthermore, rupture directivity effects lead to pronounced ground motion amplification in the rupture forward directions. This amplification is evident both southwest and northeast of the rupture termination on the EAF, extending up to tens of kilometers off the ruptured segment (Fig. 3a). Our results also suggest that a simple fault of longer length produces directivity effects over a greater distance from the ruptured fault compared to a complex segment.

a PGV (m/s) map for the Mw 7.8 event. The black box shows the region with velocity-adapted mesh that can resolve frequency globally at 1 Hz, with near-fault area ≥1 Hz (See more details in Numerical method and model discretization in Methods). The black star marks the epicenter of the Mw 7.8 event. Each circle represents a strong motion station, with the blue and purple circles showing stations within and beyond 30 km RJB distance. The black squares denote major cities in the region. The red dashed circle encompasses five clustered stations with distinct ground motion amplitude, marked specifically in (c). b Same as (a), but for the Mw 7.6 earthquake. c The ground motion decay with distance of the Mw 7.8 event. The black and red dots represent the recorded (from Disaster and Emergency Management Authority (AFAD)) and synthetic PGV at the strong motion sites, with the black and red dashed lines showing the best-fitting lines. Each gray dot represents a synthetic site at the surface, and the red solid line indicates the mean PGV decay with distance. The solid and dashed magenta lines denote the empirical ground motion model and the associated standard deviation from ref. 47. The black dashed box encompasses the five clustered stations in the red dashed circle in (a), with distinct ground motion intensity. The pink shaded box marks the anomalous ground motion intensification at the RJB distance ≥30 km. d Same as (c) but for the Mw 7.6 event.
The directivity amplification effect observed in the subshear rupture scenario is mitigated in areas of supershear rupture and is not apparent in our results of the second Mw 7.6 earthquake (Fig. 3b). Unlike the subshear rupture, where the primary energy radiation at the rupture front is confined to a narrow azimuth around the forward projection of the rupture44, energy radiation from supershear rupture is concentrated to the Mach-cone region, in which the PGV is elevated and sustained into farther distances from the fault (>60 km, Fig. 3b)44,45. For linear faults, supershear rupture typically produces two symmetric mach zones. However, our results indicate that when supershear rupture occurs on a curved fault segment, it predominantly generates strong Mach wave radiation on the inner side of the fault bend, in this case to the south of the SMF in the Mw 7.6 scenario. The lack of constructive interference from Mach shear and Mach Rayleigh waves fail to sustain a strong Mach wave on the other side (north) could be attributed to the complex-geometry effect.
The overall ground motion (i.e., RotD50 PGV) decay pattern illustrates that recordings and synthetics at the strong motion sites are consistent (black and red dashed lines in Fig. 3c). However, the simulated ground motions have slightly lower (14%) PGV values, likely due to the limited frequency resolution (~1 Hz), shallower low-velocity structures or site conditions not captured in the available velocity model. The S-wave velocity (Vs) of the top layer in the used velocity model has an average value of 2.78 km/s in the study region33, higher than the Vs30 (the average Vs to a depth of 30 m) of 0.2–0.9 km/s at the strong motion sites (from Disaster and Emergency Management Authority (AFAD))1. The velocity structure effect on the rupture dynamics and ground motion is examined in the section Velocity structure effect.
In addition, regarding the Mw 7.8 event, the ground motion decay for the strong motion recordings (black circles) and synthetic ground motion at the corresponding sites (red circles) both demonstrate anomalous ground motion intensification at the RJB distance ≥30 km (highlighted in pink shaded area in Fig. 3c). The anomalous ground motion intensification is because sites used to derive such relationship are unevenly distributed around the fault, with majority of them being located at the northern side of the fault that shows average stronger ground motion than the southern side at the same distance (more red circles above the red solid line that represents the average ground motion). However, the average decay of the synthetic ground motion (red solid line) using all synthetic sites (gray dots) shows continuous decay with distance due to geometrical spreading and attenuation. Furthermore, both events break to the surface, resulting in continuously increase of the average ground motion intensity near the fault, unlike a saturated and flat plateau at a near-fault distance for most ground motion models46,47.
For the Mw 7.8 ground motion synthetics, there are some remarkably elevated ground motion outliers between 11 and 17 km RJB distance (top three stations in the dashed black box in Fig. 3c). We attribute this locality of unusually strong ground motion to the combined effect of directivity amplification and localized site condition amplification. The cluster of five stations within the dashed box are all located in the southwest directivity amplification zone, but distributed on two sides of the Orontes river across the city Ankatya. The three stations on the west side, with low Vs30 of 300–400 m/s (Fig. S15), show much higher earthquake-triggered liquefaction probability48 and ~3–4 times stronger PGV than the other two nearby stations in the east of the river.
Velocity structure effect
In addition, we run sensitivity tests to examine the effects on the dynamic rupture process and resulting ground motion due to three velocity models: 1) 1D velocity model33; 2) 6-layer 3D velocity model32; 3) merged and combined 3D&1D model (preferred model) where the model has a mean velocity-density structure like the 1D model at equivalent depths, but lateral variations are maintained as in the 3D model, see Velocity model in Methods. The 3D velocity model comprises seismic wave-speed anomalies associated with the EAF zone and SMF zone (Fig. S4a). However, it fails to account for two depth ranges with strong velocity gradients, above 2 km and spanning depths between 28 to 34 km, which are evident in the 1D velocity model. Interestingly, the average values of the 3D velocity model within the study area remain consistent with those of the 1D velocity model at equivalent depths. Changing the velocity structure may modulate the rupture dynamics, slip on faults and the final magnitude. While all three velocity models yield comparable outcomes in terms of rupture evolution and slip distribution, the 1D velocity model generates scenarios with slightly smaller slip amplitude and magnitude (Figs. S16, S17). Additionally, the presence of lower shallow velocity structures in the 1D and 3D&1D models leads to elongated zones of supershear rupture on the shallow part of the Erkenek segment for the Mw 7.8 scenarios.
Moreover, the velocity structure variation also influences rupture evolution and hence ground motions (Fig. 4). Compared to the 1D velocity model, the 3D&1D velocity structure results in a weaker supershear rupture effect and stronger directivity amplification in the northeast of the Erkenek segment for the Mw 7.8 scenarios. In addition, the ground motion ratio of the 3D&1D scenario to the 1D scenario exhibits obvious correlation with the shear wave velocity ratio at shallow depth (Fig. 4a), where higher seismic wave velocity regions correspond to lower ground motion amplitudes, while lower seismic wave velocity regions correspond to higher ground motion amplitudes. As shown in Fig. 4c, the 1D and 3D scenarios show similar (nearly identical) average ground motion decay (blue and black lines) for both events, but lower than the 3D&1D velocity model. This indicates that both the lower velocity structure at shallow depths (difference in 3D&1D and 3D) and the velocity heterogeneity (difference in 3D&1D and 1D) contribute to the overall higher ground motion.

a and b show the ground motion amplitude ratio of the 3D&1D over 1D, and the 3D&1D over 3D. The inset in (a) show the S-wave velocity ratio of the 3D&1D over 1D of the top velocity layer. c The average ground motion decay with distance. The solid line show the decay for the Mw 7.8 event, and the dashed line for the Mw 7.6 event.
Physics-based 3D ground simulations based on deterministic source have been used to improve the ground motion predictions49,50. Spontaneous dynamic rupture models, accounting for local/regional velocity structure, topo-bathymetry, off-fault plasticity (see details in Methods), and prestressed under complex regional stress, provide self-consistent scenarios of rupture dynamics evolution, wave propagation and their coupled effect on the resulting ground motions35,51,52. Our dynamic rupture models for the 2023 Kahramanmaraş earthquake doublet, with data-constrained fault geometry and prestress loading complexity, reproduces the geodetic and seismic observations. The synthetic ground motions decay matches well with the ground motion observations, and captures localized intensity discrepancy, indicating its capability to complement the regional seismic hazard assessment. Our synthetic results also demonstrate that both the lower seismic-wave velocity and its heterogeneity lead to the overall higher ground motion. In summary, we find that dynamic rupture simulations accounting for 3D Earth structure (including topography and bathymetry) and regional stresses resolved on the geometrically complicated fault system may help to better quantify the seismic hazard on such fault structures and their nearby villages, town, cities, infrastructures, and societies.
Methods
Fault geometric model
The well-imaged surface-rupture signature of the earthquakes allows the processed InSAR data1 to clearly delineate the fault traces. We then use the relocated seismicity21 to estimate the dip direction and angles of the ruptured fault segments according to the following steps:
-
Divide the fault trace into continuous points with 0.1° intervals in the longitude or latitude, depending on whether the segment extends more to the North–South or to the East–West.
-
Determine the strike direction of each fault point. For the nth point (Pn), the strike direction is determined by the average azimuth of (Pn−1, Pn) and (Pn, Pn+1).
-
Delineate a polygon and find relocated aftershocks within it. The fault point is located at the center of the uppermost vertex of the polygon. It extends 10 km in the fault-normal direction to the aftershock clusters, which in this case is northward (Fig. S1a). The 10 km corresponds to 20 km on the fault along dip directions if the dip angle is 60°.
-
Use the best-fitting line to estimate the dip direction and angle in cross-section view (Fig. S1b). The relative horizontal distance is calculated with a reference point 2° in the southward fault-normal direction. To avoid the aftershock clusters dominating the best fitting function, we group aftershocks within 2 × 2 km2 region defined by the distance to the fault and depth, and use the average location within each rectangle to represent the aftershocks within it53. The plunge angle of the best-fitting line relative to the horizontal direction is the dip angle. We repeat the steps for all the fault points (Fig. S1), and thereby determine the dip direction and angles for the whole fault segments. Noteworthy, the best-fitting lines of the cross-section on the Maraş segment suggest the segment dips to the southeast, in contrast to the northwest distribution of aftershocks. We speculate that the aftershocks here occurred on two opposite dipping faults, with the fault in the north dipping to the southeast and the Maraş segment dipping to the northwest (Fig. S1b).
-
Remove outliers with dip angle values that deviate substantially from nearby fault points or the overall variation trend, then smooth the remaining dip angle variations. To smooth, we use the mean value of (Pn−2, Pn−1, Pn, Pn+1, Pn+2) to represent the dip value at the point Pn. The final fault dip variation is shown in Fig 1b.
Velocity model
We embed the complex-geometry fault model into a combined 1D and 3D velocity structure. The 3D velocity model is derived from the local seismic tomography model by Medved et al.32. The velocity structure comprises several low-velocity anomalies of both P and S-wave associated with the EAF zone and SMF zone (Fig. S4a). There are two limitations of the 3D velocity model: 1) It only has data for 6-depth layers of 3, 5, 7, 10, 30, and 50 km; 2) It does not cover the entire study region. For the regions outside the available 3-D velocity structure, we adopt the 1D velocity model33 used for aftershock relocation21,54. To minimize artificial dynamic effects from potentially abrupt transitions between the 3D velocity model and the 1D model at the boundary, we apply linear interpolation over distances of 9.6 km along the southern boundary and 5.6 km along the western boundary. Fig. S4a demonstrates an overall smooth transition, especially the area surrounding the fault. Additionally, the 1D velocity model show consistent values with the average 3D velocity model at its six-layer depth (Fig. S4b), allowing interpolation of additional depth layers for the 3D model at corresponding 1D depths, especially for the lack shallower depth (≤2 km) and between 28 and 32 km, where the velocity shows an abrupt change. For this, we interpolate the 3D velocity model at the 1D velocity model depth, keep the heterogeneous velocity distribution as neighboring 3D velocity layer, and fix the average value as the 1D velocity model.
Fault prestress conditions
We parameterize the prestress for our dynamic rupture models under varying geometries. We constrain a regional 3-D stress tensor from seismo–tectonic observations combined with physical assumptions on fault fluid pressurization and the Mohr–Coulomb theory of frictional failure55. We use the following stress parameters to define the prestress and fault strength56.
-
The orientation of the regional maximum horizontal compressive stress \(S{H}_{\max }\). The relative plate motion results in a rotation of the regional stress25. In our study, \(S{H}_{\max }\) changes from -10°, relative to the north, in the southwest fault branch (Amonos) of the EAF, to 25 degrees in the east of the EAF (Fig. S2a). To the north where the Mw 7.6 event occurs, \(S{H}_{\max }\) varies between 30° and 65° on the SMF.
-
The stress shape ratio s2ratio, and Sv that defines the vertical principal stress. s2ratio = (s2 − s3)/(s1 − s3) with s1 > s2 > s3 being the principal stress magnitudes. Sv = s1 favors normal faulting on a dipping fault dipping at angle (90−ϕ)° (\(\phi =\pi /4-{\rm{atan}}({\mu }_{{\rm{s}}})\)) plane striking in \(S{H}_{\max }\), Sv = s2 favors strike-slip faulting on a vertical fault plane at an angle of ϕ° with \(S{H}_{\max }\) and Sv = s3 favors reverse faulting on a ϕ° dipping fault plane striking in \(S{H}_{\max }\). If Sv = s2, the s2ratio > 0.5 induces transtension force and results in normal slip, s2ratio < 0.5 induces transpression force and results in thrust slip. We adjust these two parameters (Fig. S2b, S2c) to trigger normal and thrust slip at certain fault segments to simulate the surface vertical displacement1 and match the CMT inversions of aftershocks with Mw ≥ 3.730.
-
The ratio of fluid pressure to background lithostatic stress, γ. The depth variation of the intermediate principal stress magnitude is a function of the confining stress times 1 − γ. We assume over-pressurized pore fluids and use a constant γ = 0.8 for both events;
-
The maximum prestress ratio R0. The relative prestress ratio R is defined as the ratio of fault stress drop to breakdown strength drop, expressed as \((\tau -{\mu }_{d}{\sigma }_{n}^{{\prime} })/(({\mu }_{s}-{\mu }_{d}){\sigma }_{n}^{{\prime} })\), in which τ is the shear stress on the fault, μs and μd are the static and dynamic friction coefficients, respectively, and \(\sigma_n {\prime}\) is the effective confining stress. The fault orientation, \(S{H}_{\max }\) and s2ratio variation results in different relative prestress ratio R on different fault sections. We constrain the smallest and largest principal stress components by prescribing R0, whereby R0 = 1 indicates a critical prestress level on the optimally oriented faults57. By testing different parameter settings, we find that a spatially variable R0 (Fig. S2d) is required to match the rupture cascading and timing of observation data, and a relative larger R0 for the second event that is characterized with supershear rupture.
In addition, a stress modulation function ω(z) (z is the depth, with function values changing from 0 to 1) is applied to smoothly taper deviatoric stresses below the seismogenic depth. The varying seismogenic depth along the faults is constrained by the relocated aftershocks (Fig. 1b). The stress parameter settings shown in Fig. S2 and the ω(z) modulation results in the final relative prestress ratio R (Fig. 1c) for the dynamic modeling.
Off-fault plasticity
We assume a non-associated Drucker–Prager elasto-viscoplasticity rheology to model coseismic off-fault energy dissipation58 within the bulk of our model. Our off-fault failure criterion is parameterized by two material properties, the internal friction coefficient (=0.45, equal to the fault static friction coefficient), and the plastic cohesion Cplast, which is proportional to the 3-D variable shear modulus μ59 as Cplast = 0.0001μ. The relaxation time Tv, over which stresses are relaxed to the yield surface and reach the inviscid stress state58, also controls the effectiveness of plasticity and is set to 0.05 s to ensure convergence of the simulation results upon mesh refinement.
Rupture nucleation
Rupture initiation is prescribed in space and time by locally and gradually reducing the static friction coefficient, μs60. We apply the linear slip-weakening friction law61 for frictional yielding and dynamic slip across all faults. For model parameters that are not well constrained, we vary their values within physically reasonable ranges to identify the parameter set that generates the observed rupture cascading and extent, and best reproduces key observational data. The Serpentine-rich rock samples around the EAF zone indicate a relative low friction value62,63. Based on extensive, yet inherently limited, parameter testing, we selected the static friction coefficient (μs) of 0.45, dynamic friction coefficient (μd) of 0.1, and a slip weakening distance (Dc) of 0.3 m for our preferred model simulation. Throughout this process, we observed parameter trade-offs, indicating that alternative parameter sets-beyond those tested may also yield similar rupture dynamics and agreement with observations. The spontaneous dynamic rupture was initiated within an expanding circular area centered at the respective hypocenter for each event, following the setting in the Southern California Earthquake Center community benchmark TPV24. The kinematic rupture initiation time T is given by
in which r (km) is the radial distance to the hypocenter, Vr is the initial forced rupture velocity, here set to 3800 m/s, and rcrit is the radius of the nucleation zone, which is set to be 1.5 km for both events.
Numerical method and model discretization
We perform 3D earthquake dynamic rupture and seismic wave propagation simulations using the open-source software SeisSol that uses the arbitrary high-order accurate DERivative discontinuous Galerkin method (ADER-DG)64. The topography and bathymetry data are obtained from GeoMapApp65 at a resolution of~500 m. We use refined mesh size around the ruptured faults, a 400 by 260 km region for the first Mw 7.8 event and a 320 by 200 km region for the second Mw 7.6 event (Fig. 3). The 150 m fault discretization is effectively discretized by a maximum distance of 30 m when using fourth-order accuracy in space and time to ensure it captures the breakdown process at the crack tip. The mesh size then gradually increases from an on-fault resolution of 150 m by applying a gradation rate of 0.6 as distance from the fault grows. To maintain a frequency resolution of at least 1 Hz in the target region, delineated by the black box in Fig. 3a, b, while optimizing computational efficiency, we apply a velocity-aware meshing strategy66. This method adapts SeisSol’s mesh resolution based on the 1D33 or 3D32 velocity model, ensuring at least four elements per corresponding wavelength in the analyzed region. In the near-fault zone, where the mesh size remains below one-quarter of the wavelength due to the 0.6 gradation rate, frequencies higher than the target 1 Hz can be resolved (Fig. S18)35. Ultimately, this setup results in a mesh comprising approximately 130 million cells, with a 160 s simulation requiring about 10 h on 512 nodes of Shaheen II-equivalent to ~163,840 CPU h.
Data availability
The bathy-topography data is from GeoMapApp (www.geomapapp.org). The synthetic teleseismic waveform is computed using the Incorporated Research Institutions for Seismology (IRIS) Synthetics Engine (https://ds.iris.edu/ds/products/syngine/). The static GPS data is from http://geodesy.unr.edu/. The local strong motion data is downloaded from https://tadas.afad.gov.tr/event-detail/17966 and https://tadas.afad.gov.tr/event-detail/17969. The input files required to reproduce the earthquake simulations are available at https://doi.org/10.5281/zenodo.11202602.
Code availability
We use the open-source code SeisSol for all dynamic rupture simulations (www.seissol.org), which is freely available to download from https://github.com/SeisSol/SeisSol/. The figures were generated using the Matlab and Generic Mapping Tools v6 from https://www.generic-mapping-tools.org/.
References
Mai, P. M. et al. The destructive earthquake doublet of 6 February 2023 in South-Central Türkiye and northwestern Syria: initial observations and analyses. Seismic Rec. 3, 105–115 (2023).
Melgar, D. et al. Sub-and super-shear ruptures during the 2023 Mw 7.8 and Mw 7.6 earthquake doublet in SE Türkiye. Seismic 2, 387 (2023).
Barbot, S. et al. Slip distribution of the February 6, 2023 Mw 7.8 and Mw 7.6, Kahramanmaraş, Turkey earthquake sequence in the east Anatolian fault zone. Seismica 3, 502 (2023).
Nissen, E. et al. Limitations of rupture forecasting exposed by instantaneously triggered earthquake doublet. Nat. Geosci. 9, 330–336 (2016).
Decriem, J. et al. The 2008 May 29 earthquake doublet in SW Iceland. Geophys. J. Int. 181, 1128–1146 (2010).
Taufiqurrahman, T. et al. Dynamics, interactions and delays of the 2019 ridgecrest rupture sequence. Nature 618, 308–315 (2023).
Utsu, T. & Ogata, Y. et al. The centenary of the Omori formula for a decay law of aftershock activity. J. Phys. Earth 43, 1–33 (1995).
Gutenberg, B. & Richter, C. F. Frequency of earthquakes in California. Bull. Seismol. Soc. Am. 34, 185–188 (1944).
Ogata, Y. & Zhuang, J. Space–time ETAS models and an improved extension. Tectonophysics 413, 13–23 (2006).
Duman, T. Y. & Emre, Ö. The east Anatolian fault: geometry, segmentation and jog characteristics. Geol. Soc. Lond. Spec. Pub. 372, 495–529 (2013).
Aktug, B. et al. Slip rates and seismic potential on the east Anatolian fault system using an improved GPS velocity field. J. Geodyn. 94, 1–12 (2016).
Meghraoui, M. Paleoseismic history of the Dead Sea fault zone. Encyclopedia Of Earthquake Engineering 1–20 (Springer, 2015).
Pousse-Beltran, L. et al. The 2020 Mw 6.8 Elazíğ (Turkey) earthquake reveals rupture behavior of the east Anatolian fault. Geophys. Res. Lett. 47, e2020GL088136 (2020).
Emre, Ö. et al. Active fault database of Turkey. Bull. Earthquake Eng. 16, 3229–3275 (2018).
Wesnousky, S. G. Predicting the endpoints of earthquake ruptures. Nature 444, 358–360 (2006).
Zhang, Y. et al. Geometric controls on cascading rupture of the 2023 Kahramanmaraş earthquake doublet. Nat. Geosci. 16, 1054–1060 (2023).
Palgunadi, K. H., Gabriel, A.-A., Garagash, D. I., Ulrich, T. & Mai, P. M. Rupture dynamics of cascading earthquakes in a multiscale fracture network. J. Geophys. Res. Solid Earth 129, e2023JB027578 (2024).
Gabriel, A.-A., Ulrich, T., Marchandon, M., Biemiller, J. & Rekoske, J. 3D dynamic rupture modeling of the 6 February 2023, Kahramanmaraş, Turkey Mw 7.8 and 7.7 earthquake doublet using early observations. Seismic Rec. 3, 342–356 (2023).
Okuwaki, R., Yagi, Y., Taymaz, T. & Hicks, S. P. Multi-scale rupture growth with alternating directions in a complex fault network during the 2023 South-Eastern Türkiye and Syria earthquake doublet. Geophys. Res. Lett. 50, e2023GL103480 (2023).
Jia, Z. et al. The complex dynamics of the 2023 Kahramanmaraş, Turkey, Mw 7.8-7.7 earthquake doublet. Science 381, 985–990 (2023).
Ding, H. et al. High-resolution seismicity imaging and early aftershock migration of the 2023 Kahramanmaraş (SE Türkiye) Mw 7.9 & 7.8 earthquake doublet. Earthquake Sci. 36, 417–432 (2023).
Yönlü, Ö., Altunel, E. & Karabacak, V. Geological and geomorphological evidence for the southwestern extension of the east Anatolian fault zone, Turkey. Earth Planet. Sci. Lett. 469, 1–14 (2017).
Xu, L. et al. The overall-subshear and multi-segment rupture of the 2023 Mw7. 8 Kahramanmaraş, Turkey earthquake in millennia supercycle. Commun. Earth Environ. 4, 379 (2023).
Li, S. et al. Source Model of the 2023 Turkey earthquake sequence imaged by Sentinel-1 and GPS measurements: implications for heterogeneous fault behavior along the east Anatolian fault zone. Remote Sensing 15, 2618 (2023).
Yilmaz, H., Over, S. & Ozden, S. Kinematics of the east Anatolian Fault zone between Turkoglu (Kahramanmaras) and Celikhan (Adiyaman), Eastern Turkey. Earth Planets Space 58, 1463–1473 (2006).
Akgün, E. & İnceöz, M. Tectonic evolution of the central part of the east Anatolian fault zone, eastern Turkey. Turkish J. Earth Sci. 30, 928–947 (2021).
Güvercin, S. E., Karabulut, H., Konca, A. Ö., Doğan, U. & Ergintav, S. Active seismotectonics of the East Anatolian fault. Geophys. J. Int. 230, 50–69 (2022).
Koc, A. & Kaymakcí, N. Kinematics of Sürgü fault zone (Malatya, Turkey): a remote sensing study. J. Geodyn. 65, 292–307 (2013).
Bulut, F. et al. The East Anatolian fault zone: seismotectonic setting and spatiotemporal characteristics of seismicity based on precise earthquake locations. J. Geophys. Res. Solid Earth 117, B07304 (2012).
Petersen, G. M. et al. The 2023 Southeast Türkiye seismic sequence: rupture of a complex fault network. Seismic Rec. 3, 134–143 (2023).
Li, B. et al. Rupture heterogeneity and directivity effects in back-projection analysis. J. Geophys. Res. Solid Earth 127, e2021JB022663 (2022).
Medved, I., Polat, G. & Koulakov, I. Crustal structure of the eastern Anatolia region (Turkey) based on seismic tomography. Geosciences 11, 91 (2021).
Acarel, D., Cambaz, M., Turhan, F., Mutlu, A. & Polat, R. Seismotectonics of Malatya fault, eastern Turkey. Open Geosci. 11, 1098–1111 (2019).
Abdelmeguid, M. et al. Dynamics of episodic supershear in the 2023 M7. 8 Kahramanmaraş/Pazarcik earthquake, revealed by near-field records and computational modeling. Communications Earth & Environment, 4, 456 (2023).
Li, B., Gabriel, A.-A., Ulrich, T., Abril, C. & Halldorsson, B. Dynamic rupture models, fault interaction and ground motion simulations for the segmented Húsavík-Flatey fault zone, Northern Iceland. J. Geophys. Res. Solid Earth 128, e2022JB025886 (2023).
Ding, X. et al. The sharp turn: backward rupture branching during the 2023 Mw 7.8 Kahramanmaraş (Türkiye) earthquake. Seismica 2, 1083 (2023).
Hu, F., Oglesby, D. D. & Chen, X. The sustainability of free-surface-induced supershear rupture on strike-slip faults. Geophys. Res. Lett. 46, 9537–9543 (2019).
Wang, Z. et al. Dynamic rupture process of the 2023 Mw 7.8 Kahramanmaraş earthquake (SE Türkiye): Variable rupture speed and implications for seismic hazard. Geophys. Res. Lett. 50, e2023GL104787 (2023).
Bouchon, M. et al. Faulting characteristics of supershear earthquakes. Tectonophysics 493, 244–253 (2010).
Manighetti, I., Mercier, A. & De Barros, L. Fault trace corrugation and segmentation as a measure of fault structural maturity. Geophys. Res. Lett. 48, e2021GL095372 (2021).
Saroglu, F. The east Anatolian fault zone of Turkey. Ann. Tectonicae 117, 99–125 (1992).
Perrin, C., Manighetti, I., Ampuero, J.-P., Cappa, F. & Gaudemer, Y. Location of largest earthquake slip and fast rupture controlled by along-strike change in fault structural maturity due to fault growth. J. Geophys. Res. Solid Earth 121, 3666–3685 (2016).
Oglesby, D. D. & Mai, P. M. Fault geometry, rupture dynamics and ground motion from potential earthquakes on the North Anatolian fault under the sea of Marmara. Geophys. J. Int. 188, 1071–1087 (2012).
Andrews, D. Ground motion hazard from supershear rupture. Tectonophysics 493, 216–221 (2010).
Dunham, E. M. & Bhat, H. S. Attenuation of radiated ground motion and stresses from three-dimensional supershear ruptures. J. Geophys. Res. Solid Earth 113, 5182 (2008).
Boore, D. M. & Thompson, E. M. Revisions to some parameters used in stochastic-method simulations of ground motion. Bull. Seismol. Soc. Am. 105, 1029–1041 (2015).
Akkar, S., Sandíkkaya, M. A. & Bommer, J. J. Empirical ground-motion models for point-and extended-source crustal earthquake scenarios in Europe and the Middle East. Bull. Earthquake Eng. 12, 359–387 (2014).
Taftsoglou, M., Valkaniotis, S., Papathanassiou, G. & Karantanellis, E. Satellite imagery for rapid detection of liquefaction surface manifestations: the case study of Türkiye–Syria 2023 earthquakes. Remote Sens. 15, 4190 (2023).
Graves, R. et al. CyberShake: a physics-based seismic hazard model for southern California. Pure Appl. Geophys. 168, 367–381 (2011).
Oral, E. & Satriano, C. Future magnitude 7.5 earthquake offshore Martinique: spotlight on the main source features controlling ground motion prediction. Geophys. J. Int. 227, 1076–1093 (2021).
Gallovič, F., Valentová, L., Ampuero, J.-P. & Gabriel, A.-A. Bayesian dynamic finite-fault inversion: 2. Application to the 2016 Mw 6.2 Amatrice, Italy, earthquake. J. Geophys. Res. Solid Earth 124, 6970–6988 (2019).
Mai, P. M. Ground motion: complexity and scaling in the near field of earthquake ruptures. Encyclopedia of Complexity and Systems Science (eds Lee, W. H. K. & Meyers, R.) 4435–4474 (Springer, 2009).
Li, B., Ghosh, A. & Mendoza, M. M. Delayed and sustained remote triggering of small earthquakes in the San Jacinto fault region by the 2014 Mw 7.2 Papanoa, Mexico earthquake. Geophys. Res. Lett. 46, 11925–11933 (2019).
Lomax, A. Precise, NLL-SSST-coherence hypocenter catalog for the 2023 Mw 7.8 and Mw 7.6 SE Turkey earthquake sequence. Zenodo. Preprint at https://doi.org/10.5281/zenodo.7699882 (2023).
Tong, H. et al. Mohr space and its application to the activation prediction of pre-existing weakness. Sci. China Earth Sci. 57, 1595–1604 (2014).
Ulrich, T., Gabriel, A.-A., Ampuero, J.-P. & Xu, W. Dynamic viability of the 2016 Mw 7.8 Kaikōura earthquake cascade on weak crustal faults. Nat. Commun. 10, 1–16 (2019).
Aochi, H. & Madariaga, R. The 1999 Izmit, Turkey, earthquake: nonplanar fault structure, dynamic rupture process, and strong ground motion. Bull. Seismol. Soc. Am. 93, 1249–1266 (2003).
Wollherr, S., Gabriel, A.-A. & Uphoff, C. Off-fault plasticity in three-dimensional dynamic rupture simulations using a modal discontinuous Galerkin method on unstructured meshes: implementation, verification and application. Geophys. J. Int. 214, 1556–1584 (2018).
Roten, D., Olsen, K., Day, S., Cui, Y. & Fäh, D. Expected seismic shaking in Los Angeles reduced by San Andreas fault zone plasticity. Geophys. Res. Lett. 41, 2769–2777 (2014).
Harris, R. A. et al. A suite of exercises for verifying dynamic earthquake rupture codes. Seismol. Res. Lett. 89, 1146–1162 (2018).
Andrews, D. Rupture velocity of plane strain shear cracks. J. Geophys. Res. 81, 5679–5687 (1976).
Kitajima, H. et al. Frictional behaviors of the serpentine-rich east Anatolian fault rocks recovered from the Kartal trench site. In AGU Fall Meeting Abstracts, 2023, T33D-0352 (2023).
Harris, R. A. et al. A geology and geodesy-based model of dynamic earthquake rupture on the Rodgers Creek-Hayward-Calaveras fault system, California. J. Geophys. Res. Solid Earth 126, e2020JB020577 (2021).
Dumbser, M. & Käser, M. An arbitrary high-order discontinuous Galerkin method for elastic waves on unstructured meshes-II. The three-dimensional isotropic case. Geophys. J. Int. 167, 319–336 (2006).
Ryan, W. B. et al. Global multi-resolution topography synthesis. Geochem. Geophys. Geosyst. 10 (2009).
Breuer, A. & Heinecke, A. Next-generation local time stepping for the ADER-DG finite element method. In Proc. IEEE International Parallel and Distributed Processing Symposium. 402–413 (IEEE, 2022).
Goldberg, D. E. et al. Rapid characterization of the February 2023 Kahramanmaraş, Türkiye, earthquake sequence. Seismic Rec. 3, 156–167 (2023).
Acknowledgements
We sincerely thank Editor Joseph Aslin, Reviewer Jan Premus, Elisa Tinti and the other anonymous reviewer for their insightful comments, which have greatly contributed to improving this manuscript. We thank Irina Medved for providing the 3D velocity model. This work was supported by King Abdullah University of Science and Technology (KAUST, Grant BAS/1/1339-01-01). We gratefully acknowledge the KAUST Supercomputing Laboratory (https://www.hpc.kaust.edu.sa/) for providing computing resources on Shaheen II in projects k1587 and k1589, and Shaheen III in project K10043.
Author information
Authors and Affiliations
Contributions
B.L. developed the rupture model, conducted dynamic simulations, analyzed and visualized the results, wrote the original draft, and revised the manuscript. K.H.P. and B.W. contributed to refining the rupture model, enhancing visualization, and editing and revising the manuscript. C.S. processed strong motion data and contributed to visualization. Y.Z. and A.G. processed aftershock relocation. P.M.M. supervised and supported the project, and contributed to rupture model refinement, result analysis and visualization, and manuscript editing and revision.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Earth & Environment thanks Jan Premus, Elisa Tinti and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. Primary Handling Editor: Joe Aslin. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Li, B., Palgunadi, K.H., Wu, B. et al. Rupture dynamics and velocity structure effects on ground motion during the 2023 Türkiye earthquake doublet. Commun Earth Environ 6, 228 (2025). https://doi.org/10.1038/s43247-025-02205-4
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s43247-025-02205-4
