
Abstract
High-intensity rainfall flooding is an escalating global urban hazard, with exposure growing as cities expand and climate change intensifies. Increasing short-duration extremes are driving more frequent, severe flooding, raising damages, and disproportionately impacting vulnerable communities. These trends highlight the need for flood modeling approaches that are both high-resolution and computationally efficient to support real-time forecasting and operational decision-making. This study evaluates SynxFlow, a GPU-accelerated hydrodynamic model designed to deliver rapid, neighborhood-scale forecasts. Using gridded precipitation fields, SynxFlow simulated flood extent, depth, and velocity at fine spatial resolution across Cook County, Chicago, achieving short runtimes suitable for operational use. Validation against satellite-derived flood observations for a major storm event showed strong agreement, while a conventional CPU-based workflow substantially underestimated inundation. Overall, GPU-enabled hydrodynamic modeling can deliver accurate, near-real-time flood intelligence to strengthen warning systems, support equitable emergency response, and guide resilience investments.
Similar content being viewed by others


Introduction
Flooding from high-intensity rainfall is an escalating hazard in cities worldwide, with ~1.8 billion people living in flood-prone areas, and risk increasing rapidly due to urban expansion and intensification of extreme precipitation. Global flood losses now exceed hundreds of billions of dollars annually, with urban rainfall-driven (pluvial) flooding emerging as one of the fastest-growing contributors because of impervious surfaces, aging drainage systems, and limited adaptation capacity in rapidly growing cities. Recent high-impact rainfall-driven flood events in cities such as New York City (Hurricane Ida, 2021), Zhengzhou (Henan floods, 2021), Mumbai (recurring monsoon extremes), and Lagos (recurrent urban flooding) demonstrate that even highly developed cities increasingly face disruptive stormwater flooding that overwhelms design standards and emergency response systems.
Within this global pattern of intensifying rainfall-driven flood risk, the Chicago metropolitan region in Illinois demonstrates how legacy stormwater networks and combined sewer surcharges can amplify localized flooding under extreme precipitation. Between 1980 and 2024, Illinois experienced 128 weather/climate disasters, including eight major flooding events, each exceeding $1 billion in losses1. In Illinois, flooding from intense rainfall and combined sewer overflows (CSOs) is among the most pressing urban resilience challenges in the Chicago metro area. Cook County ranks among the highest-risk counties nationally, placing third in severe storm risk and remaining within the top ten for flood risk (NOAA). This underscores both the frequency and consequences of extreme rainfall impacts in the 3rd highest urbanized region in the US. In addition, ~44% of roads and a large share of public transit infrastructure, including 64% of Chicago Transit Authority bus stops and 47% of Pace bus stops, are located within flood-prone areas2. Across the Chicago metro area, communities such as Austin and Cicero face flood impacts due to low-lying topography, aging infrastructure, and highly impervious surfaces. Generally, flood hazards in Chicago are driven by intense short-duration convective storms, lake-effect precipitation, and combined sewer surcharges that overwhelm drainage capacity. A majority of the 311 complaints in the region are due to basement backups rather than overland flooding, highlighting the complex nature of hydrologic and sewer systems in the metro area.
Recent flooding events underscore a growing vulnerability in the region. For example, the 2 July 2023 Cicero-Berwyn flood, a 100-year return period event with 24 h storm duration, caused an estimated $300 million in damages, with highest number of 311 calls coming out of Chatham region (locations of these regions are shown in Fig. 1), while the 18 June 2020 Albany Park flooding overwhelmed local infrastructure in the Chicago region3. In addition to physical damage, such events have adverse economic impacts. For example, the 2023 event led to $426 million in federal assistance for the City of Chicago and $244 million for Cook County, supplemented by additional HUD storm recovery allocations. Cook County, as well as other areas in northeastern Illinois, experienced three more disastrous storms with significant pluvial flooding in 2024–2025. Projections indicate that Cook County faces up to an 80% probability of experiencing extreme storms and a 40% probability of flooding, leading to billion-dollar disaster events in the coming decades1. These trends highlight an urgent need for accurate and timely flood forecasting to strengthen preparedness, guide mitigation planning, and reduce the escalating costs of climate-driven disasters.

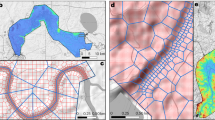
a Cook County area with the City of Chicago domain highlighted in “yellow” boundary used in this study; zoomed in view of b Cicero and Berwyn regions that experienced heavy rainfall (up to 8 inches) floods during the July 2023 event; and c Chatham region, which reports recurring basement flooding each year during heavy rainfall events.
Flood management in Chicago involves multiple agencies operating at different jurisdictional levels. At the local (city) level, the Chicago Department of Water Management (DWM) manages the city’s water distribution, sewer, and stormwater systems, while the Chicago Office of Emergency Management and Communications (OEMC) coordinates disaster preparedness, emergency response, and public alerts during flooding events4. At the regional level, the Metropolitan Water Reclamation District of Greater Chicago (MWRDGC) manages stormwater and operates the Tunnel and Reservoir Plan (TARP) to capture CSOs during extreme events5. State partners, Illinois Emergency Management Agency and Office of Homeland Security (IEMA-OHS) and Illinois Department of Natural Resources (IDNR), coordinate emergency management and watershed/regulatory functions, while federal agencies, like Federal Emergency Management Agency (FEMA) and U.S. Army Corps of Engineers (USACE), provide post-disaster assistance and deliver flood-risk reduction projects, collectively supporting structural and emergency-response strategies to reduce flood impacts.
Despite these coordinated efforts, extreme storms overwhelm system capacity, highlighting the need for modeling tools that are rapid, accurate, and operationally deployable. IEMA-OHS frames crisis response around three core challenges: (i) establishing situational awareness, (ii) issuing timely public alerts and warnings, and (iii) facilitating decision-making for response actions. Meeting these needs requires tools that can quickly deliver both predictive information and updated current conditions, such as how much rain has fallen in specific locations and what flooding impacts are most likely. Beyond operations, accurate flood modeling can also help to plan flood mitigation infrastructure investments for improved understanding of flooding trends as well as anticipate second- and third-order effects of infrastructure changes on flood likelihood. Traditionally, catchment-scale overland flood simulations have relied on hydrological models or simplified hydrodynamic approaches6,7,8. While computationally efficient, these models often struggle to capture the highly transient and spatially variable surface flow processes necessary to predict water depths and velocities in complex urban environments9,10,11,12. These limitations can reduce accuracy and confidence in estimating both flood extents and resulting economic losses.
Recent advances in flood modeling have focused on solving the 2D shallow water equations (SWEs) to represent the full dynamics of surface flow12,13,14,15. Advances in reduced-order modeling (ROM) and real-time simulation technologies have significantly expanded the feasibility of rapid flood prediction and urban hydrodynamic assessment. Nonlinear model reduction techniques, such as probabilistic manifold decomposition, have demonstrated the ability to preserve dominant flow dynamics while drastically reducing computational cost, even for highly nonlinear systems16. Similarly, machine-learning-based reduced-order models have shown promise in representing turbulent urban flows with near-real-time performance17. In parallel, the emergence of GPU-accelerated hydrodynamic solvers, including GPU-Accelerated Surface Water Flow and Transport Model (GAST)18, Flood2D-GPU19, RIM2D20, and LISFLOOD-FP 8.121, along with programming paradigms such as OpenACC22,23, has enabled high-resolution flood simulations at speeds suitable for operational forecasting and emergency response. Synxflow over these models because of its easy integration with data-science ecosystems, LLMs, and cloud computing facilities (e.g., Google Colab). These developments collectively signal a shift toward real-time or near-real-time flood modeling frameworks. Godunov-type schemes have demonstrated strong potential for urban flood modeling due to their automatic shock-capturing capability24,25, a feature essential for representing a rapid onset of floods in neighborhoods like Albany Park, Cicero, and Calumet Heights. Unlike fluvial floods that are largely confined within defined floodplains, rainfall-induced overland flows in Chicago involve shallow, unconfined sheet flows across streets, alleys, and depressions that can cause substantial basement flooding even at depths of only a few centimeters. Simulating such flood events presents three major numerical challenges: (i) discretization of slope source terms over abrupt elevation changes, such as curbs or viaduct entrances, where methods like slope-modified Riemann solver are needed to preserve the lake-at-rest state and maintain water depth positivity, preventing unrealistic velocities; (ii) treatment of friction source terms across highly variable urban roughness conditions from asphalt roads to vegetated parkways, where frictional equilibrium can occur faster than the Courant–Friedrichs–Lewy (CFL) stability limit, requiring implicit schemes to maintain numerical stability without excessive computational cost26; (iii) sensitivity of discharge estimation for Riemann solver under subcritical flow conditions with nonzero friction affect depth damage curve outputs used by the U.S. Army Corps of Engineers and FEMA27. Together, these challenges highlight the importance of robust, high-resolution numerical methods to capture the complexity of urban hydrodynamics for physical accuracy and computational efficiency.
Flooded detection using Sentinel-1 C-band Convolutional Neural Network trained on Synthetic Aperture Radar (CNN-SAR) data has emerged as one of the most effective satellite products to identify the regions getting inundated28. Sentinel-1 C-band provides all-weather, day-and-night imaging capability, enabling flood mapping during cloud-covered storm events. The low backscatter signature of floodwater in both VV (vertical–vertical) and VH (vertical–horizontal) polarization channels facilitates flood detection and classification through thresholding, change detection, and machine-learning methods29. In dense urban areas, however, double-bounce scattering from vertical structures can produce false positives, necessitating refined algorithms to improve mapping accuracy30. For the Chicago metro area, CNN-SAR-derived flood extents from the July 2023 storm provide a valuable benchmark to compare with SWE-modeled inundation patterns and assess spatial accuracy, calibrate roughness parameters, and improve operational flood response applications. Building on these datasets, this study assesses the scientific and operational performance of a GPU-accelerated SynxFlow shallow water equation solver against traditional CPU-based modeling frameworks for the 2 July 2023 flood event in Chicago. Model performance is evaluated in terms of computational speed and spatial accuracy, with validation against observed CNN-SAR-derived flood maps, providing new insight into how high-performance computing can strengthen flood resilience for urban environments with complex drainage networks.
The primary objective of the study is to evaluate the performance and operational potential effectiveness of SynxFlow, a GPU-accelerated SWE model, relative to traditional CPU-based frameworks of SWMM-HEC-RAS-2D and HAND models. Model effectiveness is quantified through statistical analysis of computational runtime, spatial inundation patterns, and CNN-SAR-derived flood maps, providing insight into the scalability and real-time applicability of GPU-enabled urban flood forecasting. More broadly, as cities globally face increasingly frequent and costly rainfall-driven flood events, often occurring outside riverine floodplains and driven by drainage limitations, there is a growing need for modeling systems that can produce actionable flood forecasts at the neighborhood scale in operational time windows. In this study, we present a scalable GPU-accelerated hydrodynamic modeling, combined with remote sensing–based flood observations, that offers a transferable pathway for improving real-time flood intelligence, strengthening early warning systems, and supporting equitable resilience planning in diverse global urban settings.
Results
Computational performance and advantages of GPU-based SynxFlow modeling
Results from our comparative analysis show that GPU acceleration delivered not only higher accuracy but also reduced runtimes. The SynxFlow simulation solved the full 2-D shallow water equations on ~4 million 10 m cells using four NVIDIA A100 GPUs in ~3 h compared to ~18 h for SWMM-HEC-RAS-2D on a 64GB RAM workstation, resulting in a six-fold improvement in computational speed. To benchmark the scalability performance, 20 different simulations were conducted with varying spatial extents of the study area. These different spatial extents (clipped at different area percentages as mentioned in the y-axis of Fig. 2) are selected randomly in the Chicago region, and the input datasets for all these extents are kept constant. The runtime shown in the x-axis of Fig. 2 is reported using wall-clock time under hardware configurations for both CPU- and GPU-based workflows. Scaling and speed-up behavior are further evaluated as a function of spatial extent (percentage area covered), enabling transparent replication of computational performance across different operational settings. The results show that the GPU-based SynxFlow outperformed the CPU-based SWMM-HEC-RAS-2D model, reducing completion times by 10–100% depending on domain size (see Fig. 2). This reduction in runtime is hydrologically significant. For example, in Chicago, flash flood waves propagate over minutes to hours, and forecasts lose operational value if runtime approaches storm onset31,32. With SynxFlow, the runtimes fell well below the 3-h mark, enabling advanced warning for near real-time forecasting and decision support.

Graph showing runtime performance for SynxFlow and SWMM-HEC-RAS-2D models for varying domain sizes expressed as percentages of the total study area. Semi-distributed SynxFlow and SWMM-HEC-RAS-2D models simulate time series of rainfall dynamics at a catchment scale, allowing for more process-based comparisons. Please note that the % area vs. time graph shows the reduced runtime of the GPU-based SynxFlow model to generate similar flood inundation maps when compared to traditional CPU-based models. Here, SynxFlow took ~3 h to simulate the entire Cook County region, while SWMM-HEC-RAS-2D simulated in ~18 h. The efficiency of the models is discussed below. Note, here we do not show the model performance for the HAND model as it utilizes a static gridded approach based solely on elevation differential and peak rainfall inputs. HAND is a simplistic model that provides a first-order estimate of inundation but does not capture surface-subsurface complex interactions or transient hydrodynamic processes.
This computational capability offers direct operational value. Agencies such as IEMA, MWRD, and OEMC can leverage near–real-time model outputs to issue road closure alerts, deploy pump trucks, and operate reservoir gate operations proactively during severe storms. Moreover, the 15-minute interval SynxFlow model temporal outputs can further allow tracking of surcharge onset and recession across combined sewer districts, offering information for basement flood risk assessment.
By reducing simulation times by an order of magnitude while maintaining physical realism, SynxFlow transitions hydrodynamic modeling from a research exercise to an operational forecasting tool. This enables agencies to evaluate multiple return periods, assess climate-adjusted storms, and design mitigation strategies within operational timelines, which is quite difficult with traditional CPU constraints.
The Height Above Nearest Drainage (HAND) model is also applied to this study for comparative analysis. The HAND model is developed using DTM, and drainage networks are derived from DTM delineation to estimate flood-prone areas across Chicago. HAND values were computed as the vertical distance from each DTM cell to the nearest drainage channel, and inundation zones were delineated by calibrating thresholds against observed flood from crowdsourced information33,34. While integration with rainfall–runoff simulations and validation against Sentinel-1 SAR flood extents and USGS streamflow gauge improved reliability, HAND could not identify flooded pixels in major urban corridors due to its spatial resolution and no substantial change in the elevations of neighborhood pixels.
In contrast, SynxFlow’s GPU-accelerated approach delivers the precision, speed, and flexibility needed for operational urban flood forecasting, bridging the gap between scientific modeling and real-time emergency management in data-rich, infrastructure-constrained cities such as Chicago.
Spatial comparison of model outputs and CNN-SAR observations
On 2 July 2023, a 100-year 24-h storm over Chicago delivered more than 200 mm of rainfall in under 6 h, triggering extensive pluvial flooding across Cook County35. This event provided an ideal testbed to assess how traditional CPU-based hydrodynamic models and GPU-accelerated models represent fine-scale urban inundation patterns when validated against CNN-SAR-derived flood observations.
Figure 3 compares flood extents derived from Sentinel-1 CNN-SAR-derived flood imagery, SynxFlow GPU-based simulations, and SWMM-HEC-RAS-2D and HAND model outputs. CNN-SAR algorithm accuracy statistics for different events is described in Supplementary Table S1. The visual and process-based comparison of these models is summarized in Supplementary Table S2 and Supplementary Fig. S3 in the Supplementary Material. Although the Sentinel-1 swatch did not capture the entire flood domain for the event, it covered more than 50% of the study area; hence, all spatial analyses and accuracy metrics were computed within the common extent. A summary of comparative model performance metrics is provided in Table 1.

a CNN-SAR-derived flood extents, b SynxFlow GPU-based outputs, and c SWMM-HEC-RAS-2D outputs for flooded regions in Cook County during the July 2023 event (categorized as a 100-year, 24-h return period event), d HAND model outputs for flooded regions for the peak rainfall during the July 2023 event. The comparison between the SynxFlow and SWMM-HEC-RAS-2D is almost the same when seen visually. However, when the comparison between the models was done at a pixel level, there were a few intricacies that were observed where SynxFlow showed better outcomes when compared to SWMM-HEC-RAS-2D. An additional benefit of SynxFlow is less runtime when compared to the SWMM-HEC-RAS-2D model. A detailed model development and processing workflow is available in the Supplementary Material.
The SWMM-HEC-RAS-2D system successfully reproduced large-scale drainage alignments, particularly along engineered channels such as the Chicago Sanitary and Ship Canal. However, it systematically underrepresented micro-topographic depressions in dense urban neighborhoods, including Cicero, Berwyn, and Englewood. This resulted in smooth flood margins that contrasted with CNN-SAR observations showing fragmented and localized ponding36,37. For example, flooded pixels were observed in rail yards, industrial corridors, and underpasses within Cicero rail corridors, and Calumet Heights arterial dips were clearly detected by CNN-SAR observations but were largely absent in the SWMM–HEC-RAS-2D output (as shown in Fig. 4). These features are often controlled by small-scale hydraulic constraints such as curbs, viaducts, and drainage inlets. Synxflow achieved IoU values up to 0.69 and Recall exceeding 0.85 in these complex dense urban structures, whereas SWMM-HEC-RAS-2D systematically underpredicted localized inundation by 30–40%. The HAND model failed almost entirely in these regions, with critical success indices near zero, as it cannot account for the dynamic flow processes inherent to the regions with curbs and drainage inlets. Many of these localized hotspots were also independently reported in the City of Chicago 311 flooding database, reinforcing their hydrologic credibility. Spatial comparison shows that census tracks in Cicero-Berwyn regions consist of huge rain yards and underpasses (see Fig. 4e). Here, Synxflow is performing better when compared to CPU-based models (green color is dominating and showing better performance of Synxflow).

a GPU-based SynxFlow model, b CPU-based SWMM-HEC-RAS-2D model, c CPU-based HAND model, and d CNN-SAR observations. Panel e shows comparative model performance metrics, with “green” indicating higher accuracy for the GPU-based SynxFlow model and “red” indicating higher accuracy for CPU-based models. The detailed performance metrics for each census tract are shown in Supplementary Table S3.
In contrast, the SynxFlow GPU model effectively captured these localized flooding features. With its 10 m hydrodynamic grid, SynxFlow reproduced CNN-SAR-observed hotspots, including alleyway ponding behind commercial corridors, pooling on the lee sides of rail embankments, and overtopping at curb depressions that direct flow into underpasses (see Fig. 5). Importantly, unlike SWMM-HEC-RAS-2D, SynxFlow maintained a continuous hydrologic connectivity of water across municipal boundaries, such as along the Cicero-Berwyn divide, where flows overtopped arterial roads and across jurisdictional limits. Overall, SynxFlow showed the closest qualitative match with CNN-SAR observations, accurately representing the heterogeneous spatially discontinuous flood patterns characteristic of dense urban areas. These results reiterate that GPU-accelerated high-resolution modeling provides the most reliable and operationally useful representation of flood hazard for complex urban environments like the Chicago metro area. Additional examples illustrating SynxFlow’s improved flood forecasting performance across multiple locations are presented as animations in the Supplementary Material.

a Overview of the region showing underpasses and curbside depressions in this example; b flood inundation maps generated using the CPU-based SWMM-HEC-RAS-2D model where the floodwater near the underpass (adjacent to the intersection of West 5th Avenue and Cicero Avenue) and along the Cicero Avenue curbs was not captured (discontinuity in blue flood extent); c outputs of GPU-based SynxFlow model which accurately captures observed flooding across underpass and curbs regions (continuous blue areas); d ground truth of the flooded underpass reported by Fox32 Chicago; and e visual evidence of curbside flooding reported by ABC7 Chicago showing water accumulation in curb depressions.
Spatial pixel-wise comparison
Quantitative pixel-wise comparisons with CNN-SAR observations confirmed the superior performance of the GPU-accelerated SynxFlow model relative to both SWMM–HEC-RAS-2D and HAND. SynxFlow achieved a Critical IoU of 0.60, a Recall of 0.65, a Precision of 0.91, and an F1-score of 0.74. In contrast, SWMM-HEC-RAS-2D reached an IoU of 0.35, a Recall of 0.39, a Precision of 0.85, and an F1-score of 0.49. The HAND model performed least effectively, with an IoU of 0.30, a Recall of 0.31, a Precision of 0.75, and an F1-score of 0.42. Although HAND overpredicted inundation, its static nature and lack of dynamic rainfall–drainage representation limit its reliability for further analysis.
At a tract level, SynxFlow consistently outperformed CPU-based models (see Fig. 6, with a zoomed-in comparison representation of Cicero region in Fig. 4). Across 1319 census tracts, SynxFlow showed higher accuracy in 976 tracts (74%), outperforming SWMM-HEC-RAS-2D and HAND when evaluated against multiple metrics, such as IoU, Recall, F1-score, bias, precision, and percentage of area similarity (Fig. 6). In flood-prone urban neighborhoods, GPU-based SynxFlow simulations captured flooding in a shorter duration with greater fidelity than CPU-based models. These results show how GPU-based SynxFlow simulations not only replicate the magnitude of flooding but also reproduce fragmented, spatially discontinuous flood patterns observed in CNN-SAR imagery, whereas CPU models consistently underpredict localized ponding. Predictions from the HAND methods were negligible across all tracts.

GPU-based SynxFlow, CPU-based SWMM–HEC-RAS-2D, and HAND model outputs with CNN–SAR observations for selected census tracts during the 2 July 2023 flood event. Higher index values indicate better model performance, while lower bias values reflect improved accuracy. The width of each violin plot represents the degree of uncertainty; wider sections correspond to lower uncertainty in model performance.
Census-tract level comparison
While citywide statistics provide a broad indication of model skill, the census tract-level evaluation reveals the true operational advantage of GPU acceleration. Across 1319 census tracts in Cook County, SynxFlow outperformed SWMM-HEC-RAS-2D and HAND in 976 tracts (74%) as measured by CSI. This advantage was most pronounced in high-density urban neighborhoods, where pluvial flooding is shaped by micro-topographic features such as viaduct underpasses, curb depressions, alleyways, and rail embankments. These are precisely the areas where conventional CPU-based hydrodynamic models fail to reproduce the fragmented ponding and short-lived inundation patterns observed in CNN-SAR imagery.
Here we show some select examples to illustrate SynxFlow’s higher fidelity. See highlighted locations in Fig. 1 discussed here. In Englewood (in the vicinity of the Chatham region), SynxFlow achieved an IoU of 0.87, a Recall of 0.62, and an F1-score of 0.68, while SWMM-HEC-RAS-2D lagged with an IoU of 0.69, a Recall of 0.87, and an F1-score of 0.82. Along the Cicero-Berwyn regions, SynxFlow predicted 5.85 million flooded pixels, nearly identical to 5.84 million observed by CNN-SAR, whereas SWMM-HEC-RAS-2D captured only 3.56 million. In Calumet Heights (within the Chatham region), SynxFlow Recall exceeded 0.65, Precision exceeded 0.9, successfully detecting underpass flooding that SWMM-HEC-RAS-2D failed to capture (Precision of 0.57), omitting nearly three-quarters of observed flood pixels. These results are summarized in Fig. 6.
This demonstrates that SynxFlow consistently excels at resolving the ephemeral, fine-scale ponding patterns that dominate pluvial hazard in Chicago’s impervious core. For example, along the Cicero-Berwyn boundary, SynxFlow predicted 5.85 million flooded pixels, almost identical to 5.84 million of CNN-SAR, effectively achieving perfect volumetric agreement with a recall of 0.71. SWMM-HEC-RAS-2D substantially underestimated the flooding area at 3.56 million pixels with a Recall of 0.52, failing to simulate overtopping across arterial roads. This mismatch is hydrologically significant as both CNN-SAR and SynxFlow outputs confirmed flow continuity across the municipal boundary, while SWMM-HEC-RAS-2D artificially partitioned the inundation due to its routing through delineated flow paths and coarser hydraulic of flow junctions, nodes, and storage units.
Results show the largest performance gaps in neighborhoods located on combined sewer networks, particularly on the South and West Sides of Chicago. In these areas, subtle elevation differences determine whether surcharge water backflows into basements or overtops roadways. By resolving these gradients at 10 m spatial resolution, SynxFlow reproduced CNN-SAR-observed inundation with higher confidence and physical realism. In contrast, SWMM-HEC-RAS-2D systematically smoothed over these fine-scale variations, producing outputs that are hydrologically informative at regional scales but operationally misleading at the household or street level. Overall, tract-level evaluation of model performances demonstrates that SynxFlow is not simply a computational enhancement but a fundamental shift in predictive capability for high-resolution hydrodynamic modeling with the spatial and social realities of flood risk management for urban areas such as the Chicago metropolitan area. By accurately reproducing CNN-SAR observed inundation patterns at the street/neighborhood scale and further aggregating at the census-tract scale for comparison with other model outputs, SynxFlow establishes itself as a scientifically robust and operationally actionable approach for flood forecasting, planning, and designing resilience strategies.
Discussion
This study demonstrates the capability of SynxFlow, a GPU-accelerated, high-resolution hydrodynamic model for urban flood forecasting across the Chicago metro area, Illinois. By explicitly solving the shallow water equations on a 10 m computational grid, SynxFlow achieved a balance between physical accuracy and computational efficiency that conventional CPU-based frameworks such as SWMM-HEC-RAS-2D and HAND could not match. This type of scalable, high-resolution forecasting capability is increasingly needed not only in U.S. cities but also in rapidly urbanizing regions worldwide where drainage infrastructure is under-designed or under-maintained relative to changing rainfall extremes.
Validation against Sentinel-1 CNN-SAR flood extents from the 2 July 2023 storm, a 100-year, 24-h return period event that delivered more than 200 mm of rainfall in under 6 h, confirmed that GPU simulations reproduced the spatial complexity of flooding in dense urban catchments more accurately than either the SWMM-HEC-RAS-2D or HAND terrain-index models. While performance metrics in countywide areas were broadly comparable, tract-level analysis across 1319 census tracts showed SynxFlow outperformed in nearly three-quarters of all tracts, particularly in high-density neighborhoods such as Englewood, Cicero, Berwyn, and Calumet Heights. In these neighborhoods, GPU-based SynxFlow simulations achieved IoU values up to 0.69, Recall exceeding 0.85, and nearly perfect volumetric bias of 0.9, closely matching agreement with CNN-SAR observations. In contrast, SWMM-HEC-RAS-2D systematically underpredicted localized inundation by 30–40%, producing smooth and unrealistic flood boundaries, while HAND failed almost entirely to capture pluvial flooding dynamics with critical success indices close to zero. These results highlight the structural limitations of coarse-grid, CPU-based solvers in representing micro-topographic pluvial flooding features such as viaducts, curbs, and underpasses in sewer-constrained urban basins. Globally, these same micro-topographic features and drainage constraints drive flood losses in megacities and mid-sized cities alike, where shallow flooding with just a few centimeters deep can still cause major disruption through basement flooding, transit shutdowns, and business interruption.
An important advantage of GPU-based SynxFlow lies in its computational speed. The model completed a simulation of the July 2023 storm in ~3 h using four NVIDIA A100 GPUs, compared to ~18 h for SWMM-HEC-RAS-2D on a high-end CPU workstation, a six-fold acceleration. This reduction puts simulation time well below the storm duration itself, a critical prerequisite for operational flood forecasting where actionable decisions need to be taken and implemented within hours before the event. As flood risk grows globally, the operational value of hydrodynamic forecasting is increasingly determined not only by accuracy but also by whether forecasts can be delivered within decision-relevant time windows, particularly for pluvial flash flooding where hazard onset is rapid and response options are time-constrained. The ability to generate flood forecasts before, rather than during and after a storm, and to test multiple alternative rainfall inputs, return periods, or mitigation scenarios within the same operational timeframe fundamentally transforms flood modeling from a retrospective research exercise (an afterthought) into a proactive decision-support system.
For agencies such as the MWRDGC and the OEMC in the Chicago region, this capacity allows for direct integration of model outputs into their operational workflows, issuing road closure alerts, operating sewer pump stations, managing Chicago area waterways, the TARP system, and other emergency response operations in real-time. By accurately capturing street-level ponding, underpass flooding, and cross-boundary flow connectivity with greater accuracy, SynxFlow forecasts are not only faster but also more relevant to the infrastructure vulnerabilities that drive economic impacts. This capability could support more timely and targeted public warnings of flooding, as well as guide disaster response and recovery more effectively than existing tools. Comparable operational needs exist across flood-exposed cities globally, from coastal megacities managing compound rainfall to flooding in inland urban regions with poor drainage systems, where rapid neighborhood-scale flood intelligence can strengthen early warning systems, decrease infrastructure losses, reduce mortality and displacement, and improve targeted emergency response.
Despite its demonstrated capability, several limitations remain for GPU-based SynxFlow in operational urban flood forecasting deployment. One most significant limitation lies in the availability of ground truth data for model validation. The current reliance on CNN-SAR observations is limited by satellite revisit cycles, i.e., the coverage is likely not always available for all regions. For example, CNN-SAR coverage is currently not available across the entire Chicago metropolitan area. In addition, the lack of observational data within underground sewer networks is often unavailable, thus limiting any model’s ability to fully represent surcharge and backflow processes and reducing the fidelity of numerical models in areas where surface-subsurface interactions dominate. These limitations are not unique to Chicago. Globally, the absence of digitized drainage network data and consistent validation observations remains one of the most widespread barriers to operational urban flood forecasting. Future development should focus on expanding and diversifying validation datasets. Enhancing CNN-SAR observations through training on higher-resolution and multi-temporal datasets will improve the ability to capture short-lived flood dynamics. In parallel, integrating crowdsourced data streams, such as social media reports, 311 flood complaints, and community-based floodtracker (e.g., Discovery Partners Institute (DPI) Climate Hub US-wide flood tracker; https://floodtracker.climate-dpi.org/), offers valuable real-time insights for model calibration and event verification, particularly where satellite observations are unavailable38.
Another key opportunity lies in real-time data assimilation. Coupling SynxFlow with live radar precipitation feeds, surface sensor networks, and machine-learning–based nowcasting techniques commonly used in meteorology39,40 could substantially enhance storm characterization and provide more accurate inputs for flood forecasting models. Incorporating subsurface drainage network data and hydraulic infrastructure telemetry would further strengthen the model’s realism and operational integration. However, such drainage data are rarely accessible. Much of it is either classified as critical infrastructure or stored in legacy, paper-based archives that cannot be readily digitized or integrated into hydrodynamic models. Addressing this limitation will require deep partnerships and sustained collaboration among local/regional agencies and academic institutions41. These partnerships could enable the creation of a city-scale, continuously updated flood intelligence platform that merges sensor, model, and observational data streams in real time, thus significantly improving the situational awareness that civic leaders and emergency management agencies need to advise and support the general public.
These advancements would expand SynxFlow’s role from an analytical research model to an operational backbone for real-time flood risk assessment, resilience planning, and climate adaptation strategies. To realize this vision, this article provides the scientific foundation and validation of the AerisIQ flood forecaster, an operational flood decision-support platform built on GPU-accelerated SynxFlow and co-developed with regional and local municipal partners across Illinois. AerisIQ is intended to improve situational awareness, enable earlier and more targeted warnings, and support coordinated flood management across the Chicago metropolitan region, with scalability to other flood-prone communities statewide and beyond. In summary, the combination of GPU-accelerated SWE solvers, remote sensing–based validation, and operational co-development provides a transferable framework for cities across the globe needing improvements in real-time flood intelligence, reducing the growing economic burden of flooding, and strengthening infrastructure resilience in the face of intensifying rainfall extremes.
Methods
Regional context
The study area covers the City of Chicago and surrounding communities within Cook County, Illinois, as shown in Fig. 1. This region is a densely urbanized region characterized by flat terrain, extensive impervious surfaces covering ~60% of the total area, and a combined sewer network prone to surcharge during extreme rainfall. Figure 7 shows the flowchart that provides information on static and dynamic datasets required for the models, the schematic representation of processes involved in the model simulations, and validation data acquired from CNN-SAR observations over the Chicago region at 10 m resolution. Due to the unavailability of combined sewer network data, surface flow paths and drainage directions were delineated using a 1 m resolution Digital Terrain Model (DTM) obtained from the Cook County GIS repository, enabling high-fidelity representation of overland flow patterns. This high-resolution DTM data allowed us to realistically represent overland flow connectivity and localized depressions that act as storage areas during storm events.

Information on input data, different models used in the study, and their respective approaches to model algorithms, resulting flood outputs, and cross-validated with CNN-SAR Sentinel-1 satellite observations at 10 m resolution. For more details on CNN-SAR development, please refer to our previous study38. The detailed process-based differences and architecture description of models are mentioned in Supplementary Material Sections G, H.
Study period
This analysis focuses on the 2 July 2023 flood event, a 100-year, 24-h return period storm that caused widespread inundation across neighborhoods such as Cicero and Berwyn. The locations of Chatham, Cicero, and Berwyn are mentioned in Fig. 1. This event delivered more than 8 inches (203 mm) of rainfall within 6 h, overwhelming drainage capacity and triggering extensive street and basement flooding across the region. In Cicero alone, nearly 7000 residents reported flood damage to their properties. The CSO infrastructure in the region was designed decades ago and is inadequate to handle such events with high-intensity and short-duration rainfall. The federal government responded to these damages by allocating $96 million in disaster relief funds to Cicero, underscoring the severity of the event and the extensive recovery efforts required.
Input datasets
The 1 m resolution DTM was used as the primary topographic input for hydrodynamic simulations. This dataset adequately resolves macro-scale flow pathways while maintaining computational efficiency and forms the base for both static (HAND) and dynamic (SynxFlow, SWMM–HEC-RAS-2D) model domains.
Rainfall forcing was derived from the Daymet v4 daily precipitation dataset, and Multi-Radar/Multi-Sensor (MRMS) data aggregated to an hourly scale at 1 km spatial resolution, which provides gridded weather and climatological variables through interpolation and extrapolation of ground-based observations using advanced statistical modeling techniques42. The Daymet dataset captures spatial and the MRMS data captures the temporal rainfall variability essential for driving distributed hydrodynamic models. Subsequent change detection and backscatter thresholding techniques were applied to delineate inundated areas and generate ground-truth flood masks for CNN-SAR model validation (detailed model validation is available in the Supplementary Material).
Ground Range Detected (GRD) imageries at 10 m resolution were extracted from Sentinel-1 C-band dual-polarized (VV and VH) SAR archive using Google Earth Engine. Standard radiometric calibration, terrain correction, and Refined Lee speckle filtering techniques were used to correct GRD imageries for azimuth angle, backscatter effect, and boundary misalignment43,44,45,46. These pre-processed GRD imageries are further ingested in the CNN-SAR algorithm specifically designed to extract flooded pixels at 10 m resolution. A detailed flowchart (Supplementary Fig. S1) with validation on CNN-SAR observation flood data for multiple events is mentioned in Supplementary Table S1. See our previous study and Supplementary Material for details on methodology38. We also performed model performance of CNN-SAR observational flood data based on a binary cross-entropy loss function (see details in Supplementary Material and Supplementary Fig. S2). This method provides satellite observations of flooding acquired immediately after the flood event for our event on 2 July 2023, with an accuracy of 81%, as shown in Supplementary Table S1 and also demonstrated in our previous study38. Note, Sentinel-1 satellite passes on this day at 23:49 local time over the Chicago region, and 30% of the data over the metro area was missed because the Sentinel-1 swatch did not capture the entire domain.
Land surface characteristics were obtained using the National Land Cover Database (NLCD 2019)47, which provided estimates of impervious surface fraction and land-use type to derive surface roughness and runoff coefficients. Additionally, Food and Agriculture Organization (FAO) soil data were used to determine hydraulic conductivity parameters, essential for modeling infiltration components within hydrologic simulations.
Major hydraulic infrastructure, including the TARP and the McCook and Thornton reservoirs, was represented as storage and routing nodes within the modeling domain to account for detention, diversion, and conveyance processes influencing flood propagation. Chicago has a CSO system that collects both sewage and stormwater, which can be discharged into the river system if overwhelmed. The city manages this by diverting excess flow into the TARP system, which stores the water until it can be treated at reclamation plants. The CSO data is restricted and is not available as open data. Hence, for this study, the CSO data is not utilized while developing CPU and GPU-based models; however, the drainage patterns and flows are derived from DTM delineation.
Modeling frameworks
The SynxFlow model, developed on the HiPIMS-CUDA framework, explicitly solves the two-dimensional shallow-water equations using a finite-volume Godunov-type solver with MUSCL-Hancock reconstruction and HLLC Riemann flux, ensuring conservation and shock stability under different flow conditions48. This solver predicts depth and velocity of the floods using a Python-bound version of the open-source code hipims-cuda (https://github.com/HEMLab/HiPIMS-CUDA). This GPU-based solver enables high-resolution simulations at a city scale within operationally feasible runtimes. SynxFlow consists of 3 major processes: (i) pre-processing (to get the data ready in common data formats such as numpy, arrays, and panda data frames for the CUDA framework), (ii) incorporating Input/Output processes for simulating flows in the domain, and (iii) post-processing (to get flood depth and velocity)49. The IO module comprises several classes and functions that provide pre-processed input datasets to the solvers and process their outputs. The IO functionality for the flood solver is based on the open-source hipims-io package26.
In the SWMM component, rainfall is transformed into runoff using the Green–Ampt infiltration method (Chow et al., 1988), with depression storage incorporated to estimate effective rainfall. Runoff from each sub-catchment bounded by delineated drainage networks is routed using the kinematic wave approximation of the Saint-Venant equations. The hydrologic outputs from SWMM were dynamically ingested into the HEC-RAS 2D hydraulic module, where exfiltrated or ponded discharges from SWMM junctions served as lateral inflow boundary conditions50. HEC-RAS then governed surface flow propagation via the 2D shallow water equations, resolving flood extent, depth, and velocity across the hydraulic grid. HEC-RAS from the US Army Corps of Engineers is widely used due to its user-friendly graphical interface and support for third-party Python automation51. However, it does not support multi-GPU acceleration and remains proprietary software, limiting both customization and open development49.
The Height Above Nearest Drainage (HAND) model was used to generate a static, terrain-driven flood inundation layer from the 1 m DTM. Each grid cell’s elevation was referenced to the nearest drainage channel, with cells having HAND ≤ 2 m classified as potentially flooded. While computationally efficient, the HAND model does not account for dynamic rainfall–infiltration–drainage processes and thus serves primarily as a topographic baseline for comparison with physics-based hydrodynamic models52. In this study, SynxFlow simulations were executed using four GPUs with 64 GB of system memory, while the SWMM–HEC-RAS and HAND workflows were run in a CPU-only environment using three processing threads and 64 GB of RAM. Under these configurations, the CPU-based workflows required longer wall-clock runtimes than the GPU-based simulations for high-resolution (10 m) domains. For more details on model processes and hardware architecture, please see Supplementary Material Sections G, H.
Data availability
This research paper uses multiple publicly available datasets. HiTAB-Chicago dataset can be accessed at https://doi.org/10.5281/zenodo.10463648. Other datasets used in this study are publicly available and can be accessed via the following links as of January 2024. Illinois Height Modernization project: https://clearinghouse.isgs.illinois.edu/data/elevation/illinois-height-modernization-ilhmp; Chicago 2018 parcel-level land use inventory: https://www.cmap.illinois.gov/data/land- use/inventory; Chicago building footprint: https://data.cityofchicago.org/Buildings/Building- Footprints-current-/hz9b-7nh8; National Agriculture Imagery Program: https://naip.usdaonline.hub.arcgis.com/; and EPA Meter-scale Urban Land Cover: https://doi.org/10.3390/rs12121909. Sentinel-1 datasets can be accessed at https://dataspace.copernicus.eu/data-collections/sentinel-data/sentinel-1. Also, the performance of models for all census tracts is provided in the Supplementary Material. The AerisIQ portal in the manuscript is available at https://aerisiq.climate-dpi.org/.
Code availability
The GPU-based SynxFlow model can be accessed at https://github.com/SynxFlow/SynxFlow. For post-processing satellite images, ArcGIS Pro is used.
References
Smith, A. B. U. S. billion-dollar weather and climate disasters, 1980 - present (NCEI accession 0209268). NOAA National Centers for Environmental Information, https://doi.org/10.25921/STKW-7W73 (2020).
CMAP. Risk-based Vulnerability Assessment (CMAP, 2018).
Lee, J., Berkelhammer, M., Park, S. Y. & Wilson, M. D. Analysis of urban flooding in Chicago based on crowdsourced data: drivers and the need for community-based mitigation strategies. Environ. Res. Infrastruct. Sustain. 5, 025008 (2025).
City of Chicago. City of Chicago Green Stormwater Infrastructure Strategy. https://www.chicago.gov/city/en/sites/2025-green-stormwater-infrastructure-strategy/home.html (2025).
Nanía, L. S., León, A. S. & García, M. H. Hydrologic-hydraulic model for simulating dual drainage and flooding in urban areas: application to a catchment in the metropolitan area of Chicago. J. Hydrol. Eng. 20, 04014071 (2015).
Teng, J. et al. Flood inundation modelling: a review of methods, recent advances and uncertainty analysis. Environ. Model. Softw. 90, 201–216 (2017).
Shaw, J., Kesserwani, G., Neal, J., Bates, P. & Sharifian, M. K. LISFLOOD-FP 8.0: the new discontinuous Galerkin shallow-water solver for multi-core CPUs and GPUs. Geosci. Model Dev. 14, 3577–3602 (2021).
Rong, Y., Bates, P. & Neal, J. GPU-accelerated urban flood modeling using a nonuniform structured grid and a super grid scale river channel. Water Resour. Res. 60, e2023WR036128 (2024).
Caviedes-Voullième, D., Fernández-Pato, J. & Hinz, C. Performance assessment of 2D Zero-Inertia and Shallow Water models for simulating rainfall-runoff processes. J. Hydrol. 584, 124663 (2020).
Costabile, P., Costanzo, C., De Lorenzo, G. & Macchione, F. Is local flood hazard assessment in urban areas significantly influenced by the physical complexity of the hydrodynamic inundation model? J. Hydrol. 580, 124231 (2020).
Costabile, P., Costanzo, C., Kalogiros, J. & Bellos, V. Toward street-level nowcasting of flash floods impacts based on HPC hydrodynamic modeling at the watershed scale and high-resolution weather radar data. Water Resour. Res. 59, e2023WR034599 (2023).
Li, X. et al. Numerical insights into the effects of model geometric distortion in laboratory experiments of urban flooding. Water Resour. Res. 56, e2019WR026774 (2020).
Cea, L. et al. Recent advances and future challenges in urban pluvial flood modelling. Urban Water J. 22, 149–173 (2025).
Dewals, B. et al. Can the 2D shallow water equations model flow intrusion into buildings during urban floods? J. Hydrol. 619, 129231 (2023).
Jafarzadegan, K. et al. Recent advances and new frontiers in riverine and coastal flood modeling. Rev. Geophys. 61, e2022RG000788 (2023).
Guo, J. & Xiao, D. Nonlinear model reduction by probabilistic Manifold Decomposition. SIAM J. Sci. Comput. 48, A209–A235 (2026).
Xiao, D. et al. A reduced order model for turbulent flows in the urban environment using machine learning. Build. Environ. 148, 323–337 (2019).
Hou, J. et al. A GPU-based numerical model coupling hydrodynamical and morphological processes. Int. J. Sediment Res. 35, 386–394 (2020).
Kalyanapu, A. J., Shankar, S., Pardyjak, E. R., Judi, D. R. & Burian, S. J. Assessment of GPU computational enhancement to a 2D flood model. Environ. Model. Softw. 26, 1009–1016 (2011).
Khosh Bin Ghomash, S., Deng, S. & Apel, H. Enabling real-time high-resolution flood forecasting for the entire state of Berlin through multi-GPU accelerated physics-based modeling. Nat. Hazards Earth Syst. Sci. 26, 85–101 (2026).
Sharifian, M. K., Kesserwani, G., Chowdhury, A. A., Neal, J. & Bates, P. LISFLOOD-FP 8.1: new GPU-accelerated solvers for faster fluvial/pluvial flood simulations. Geosci. Model Dev. 16, 2391–2413 (2023).
Zhang, S., Yuan, R., Wu, Y. & Yi, Y. Parallel computation of a dam-break flow model using OpenACC applications. J Hydraul Eng 143, 04016070 (2017).
Liu, Q., Qin, Y. & Li, G. Fast simulation of large-scale floods based on GPU parallel computing. Water 10, 589 (2018).
Yu, C. & Duan, J. Two-dimensional hydrodynamic model for surface-flow routing. J. Hydraul. Eng. 140, 04014045 (2014).
Cea, L. & Bladé, E. A simple and efficient unstructured finite volume scheme for solving the shallow water equations in overland flow applications: the shallow water equations for overland flow applications. Water Resour. Res. 51, 5464–5486 (2015).
Xia, X., Liang, Q., Ming, X. & Hou, J. An efficient and stable hydrodynamic model with novel source term discretization schemes for overland flow and flood simulations. Water Resour. Res. 53, 3730–3759 (2017).
Dong, B. et al. Multi-GPU parallelization of shallow water modelling on unstructured meshes. J. Hydrol. 657, 133105 (2025).
Portalés-Julià, E., Mateo-García, G. & Gómez-Chova, L. Understanding flood detection models across Sentinel-1 and Sentinel-2 modalities and benchmark datasets. Remote Sens. Environ. 328, 114882 (2025).
Jamali, A. et al. Residual wave vision U-Net for flood mapping using dual polarization Sentinel-1 SAR imagery. Int. J. Appl. Earth Obs. Geoinf. 127, 103662 (2024).
Shen, X., Anagnostou, E. N., Allen, G. H., Robert Brakenridge, G. & Kettner, A. J. Near-real-time non-obstructed flood inundation mapping using synthetic aperture radar. Remote Sens. Environ. 221, 302–315 (2019).
Ivanov, V. Y. et al. Breaking down the computational barriers to real-time urban flood forecasting. Geophys. Res. Lett. 48, e2021GL093585 (2021).
Flood Basics. NOAA National Severe Storms Laboratory https://www.nssl.noaa.gov/education/svrwx101/floods/ (2012).
Thalakkottukara, N. T. et al. Suitability of the height above nearest drainage (HAND) model for flood inundation mapping in data-scarce regions: a comparative analysis with hydrodynamic models. Earth Sci. Inform. 17, 1907–1921 (2024).
Johnson, J. M., Munasinghe, D., Eyelade, D. & Cohen, S. An integrated evaluation of the National Water Model (NWM)–Height Above Nearest Drainage (HAND) flood mapping methodology. Nat. Hazards Earth Syst. Sci. 19, 2405–2420 (2019).
Rippey, B. et al. Weatherwatch: July 2023. Weatherwise 76, 46–64 (2023).
Lou, W. et al. A highly generalizable data-driven model for spatiotemporal urban flood dynamics real-time forecasting based on coupled CNN and ConvLSTM. https://doi.org/10.5194/egusphere-2025-3171 (2025).
Saleh, T., Holail, S., Xiao, X. & Xia, G.-S. High-precision flood detection and mapping via multi-temporal SAR change analysis with semantic token-based transformer. Int. J. Appl. Earth Obs. Geoinf. 131, 103991 (2024).
Lee, J. et al. Comparing multi-source urban flood indicators: satellite, simulation, and citizen-reported data. Environ. Res. Water 1, 035007 (2025).
Li, P. & Sharma, A. Hyper-local temperature prediction using detailed urban climate informatics. J. Adv. Model. Earth Syst. 16, e2023MS003943 (2024).
Li, P., Yu, Y., Huang, D., Wang, Z.-H. & Sharma, A. Regional heatwave prediction using graph neural network and weather station data. Geophys. Res. Lett. 50, e2023GL103405 (2023).
Sharma, A. et al. Advancing urban water resilience: coproducing knowledge through civic–academic global partnerships on water and climate. Bull. Am. Meteorol. Soc. 106, E1098–E1107 (2025).
Thornton, P.E. et al. Gridded daily weather data for North America with comprehensive uncertainty quantification. Sci. Data 8, 190, https://doi.org/10.1038/s41597-021-00973-0 (2021).
Markert, K. N. et al. Comparing Sentinel-1 surface water mapping algorithms and radiometric terrain correction processing in southeast Asia utilizing Google Earth Engine. Remote Sens. 12, 2469 (2020).
Manavalan, R., Rao, Y. S. & Krishna Mohan, B. Comparative flood area analysis of C-band VH, VV, and L-band HH polarizations SAR data. Int. J. Remote Sens. 38, 4645–4654 (2017).
Brunner, M. I., Gilleland, E., Wood, A., Swain, D. L. & Clark, M. Spatial dependence of floods shaped by spatiotemporal variations in meteorological and land-surface processes. Geophys. Res. Lett. 47, e2020GL088000 (2020).
El Hajj, M., Baghdadi, N., Zribi, M. & Angelliaume, S. Analysis of Sentinel-1 radiometric stability and quality for land surface applications. Remote Sens. 8, 406 (2016).
Dewitz, J. National Land Cover Database (NLCD) 2019 products (ver. 3.0, February 2024). U.S. Geological Survey https://doi.org/10.5066/P9KZCM54 (2021).
Xia, X. et al. An integrated hydrodynamic model for runoff-generated debris flows with novel formulation of bed erosion and deposition. Eng. Geol. 326, 107310 (2023).
Xia, X. & Ming, X. SynxFlow: A GPU-accelerated Python package for multi-hazard simulations. J. Open Source Softw. 10, 7586 (2025).
Khatooni, K., Hooshyaripor, F., MalekMohammadi, B. & Noori, R. A new approach for urban flood risk assessment using coupled SWMM-HEC-RAS-2D model. J. Environ. Manage. 374, 123849 (2025).
USACE HEC-RAS. Hydrologic Engineering Center's River Analysis System (HEC-RAS): River Analysis System, User’s Manual. U.S. Army Corps of Engineers, Hydrologic Engineering Center, Davis, Calif. https://www.hec.usace.army.mil/software/hec-ras/ (2001).
Thomas, J. et al. Development of a HAND-based flood risk assessment tool in Google Earth Engine for a data-scarce region in the US. J. Great Lakes Res. 51, 102510 (2025).
Acknowledgements
This research is supported by the National Science Foundation awards 2139316, 2230772, and 2330565. This material is based upon work supported by the U.S. Department of Energy, Office of Science, and Office of Biological and Environmental Research’s Urban Integrated Field Laboratories CROCUS project research activity, under Contract DE-AC02-06CH11357.
Author information
Authors and Affiliations
Contributions
A.W. collected data, performed formal analysis, developed the research framework, created visualizations, and wrote the original draft. A.S. developed the research framework, contributed to visualization, co-wrote and reviewed the manuscript, and supervised the study. X.X. contributed to the SynxFlow model framework and reviewed and edited the manuscript. K.K. reviewed and edited the manuscript. T.P.C. reviewed and edited the manuscript and provided insights on SWMM and HEC-RAS modeling. D.N.K. contributed to the CNN-SAR model framework and reviewed and edited the manuscript. C.K. reviewed and edited the manuscript and contributed flood damage statistics and operational use insights. C.D. reviewed and edited the manuscript and contributed flood damage statistics and operational use insights.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Wadhwa, A., Sharma, A., Xia, X. et al. GPU-accelerated city-scale urban flood forecasting for real-time decision-making. npj Nat. Hazards 3, 31 (2026). https://doi.org/10.1038/s44304-026-00190-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s44304-026-00190-y
