
Abstract
Minimally invasive implantation of flexible microelectrodes is a major challenge for advancing human–machine interfaces and bioelectronic medicine. Existing approaches typically require surgical procedures or sharp-needle-assisted insertion, limiting direct usability, causing bleeding and hindering electrode–tissue fixation. Here we present a soft implantation strategy based on tip-focused radiofrequency perforation, enabling bloodless, stealthy insertion of flexible electronic hairs (FEHs) into dense tissues such as skin and muscle. The localized radiofrequency field at each FEH tip generates highly confined thermal perforation, allowing facile implantation with high biocompatibility and tight bioelectric coupling. FEH sidewalls can be functionalized with bioadhesive layers to enhance fixation, and the implanted hairs operate as plug-and-play, semi-implantable devices for intramuscular electrophysiology, including electromyography recording and electrical stimulation to drive prosthetic devices. This approach offers a minimally invasive pathway to wearable, semi-implantable bioelectronics and could open new opportunities for human–machine interfacing and clinical applications.
This is a preview of subscription content, access via your institution
Access options
Subscribe to this journal
Receive 12 digital issues and online access to articles
$119.00 per year
only $9.92 per issue
Buy this article
- Purchase on SpringerLink
- Instant access to the full article PDF.
USD 39.95
Prices may be subject to local taxes which are calculated during checkout






Similar content being viewed by others


Data availability
The data that support the findings of this study are available within the paper and its Supplementary Information. Source data are provided with this paper.
Code availability
The code supporting this study is available from Code Ocean at https://codeocean.com/capsule/2347072/tree.
References
Zheng, M., Sheng, T., Yu, J., Gu, Z. & Xu, C. Microneedle biomedical devices. Nat. Rev. Bioeng. 2, 324–342 (2023).
McCall, J. G. et al. Preparation and implementation of optofluidic neural probes for in vivo wireless pharmacology and optogenetics. Nat. Protoc. 12, 219–237 (2017).
Zhang, E. et al. An injectable and biodegradable zwitterionic gel for extending the longevity and performance of insulin infusion catheters. Nat. Biomed. Eng. 8, 1197–1213 (2024).
Prausnitz, M. R. & Langer, R. Transdermal drug delivery. Nat. Biotechnol. 26, 1261–1268 (2008).
Liu, S. et al. A neuroanatomical basis for electroacupuncture to drive the vagal–adrenal axis. Nature 598, 641–645 (2021).
Kwon, H., Di Cristina, J. F., Rutkove, S. B. & Sanchez, B. Recording characteristics of electrical impedance-electromyography needle electrodes. Physiol. Meas. 39, 055005 (2018).
Inui, K., Tran, T. D., Hoshiyama, M. & Kakigi, R. Preferential stimulation of Aδ fibers by intra-epidermal needle electrode in humans. Pain 96, 247–252 (2002).
Holly, N. L., Hasse, B. A., Gothard, K. M. & Fuglevand, A. J. Large-scale intramuscular electrode system for chronic electromyography and functional electrical stimulation. J. Neurophysiol. 128, 1011–1024 (2022).
Yang, S. et al. Stretchable surface electromyography electrode array patch for tendon location and muscle injury prevention. Nat. Commun. 14, 6494 (2023).
Tian, H. C. et al. Flexible multi-channel microelectrode with fluidic paths for intramuscular stimulation and recording. Sens. Actuators A Phys. 228, 28–39 (2015).
Chapman, A. R., Vicenzino, B., Blanch, P., Knox, J. J. & Hodges, P. W. Intramuscular fine-wire electromyography during cycling: repeatability, normalisation and a comparison to surface electromyography. J. Electromyogr. Kinesiol. 20, 108–117 (2010).
Poppendieck, W. et al. Development of multi-channel intramuscular EMG recording electrodes. Biomed. Tech. (Berl) https://doi.org/10.1515/bmt-2013-4380 (2013).
Kim, H. et al. Skin preparation-free, stretchable microneedle adhesive patches for reliable electrophysiological sensing and exoskeleton robot control. Sci. Adv. 10, eadk5260 (2024).
Yoshida, K., Farina, D., Akay, M. & Jensen, W. Multichannel intraneural and intramuscular techniques for multiunit recording and use in active prostheses. Proc. IEEE 98, 432–449 (2010).
Weir, R. E. F. et al. Implantable myoelectric sensors (IMESs) for intramuscular electromyogram recording. IEEE Trans. Biomed. Eng. 56, 159–171 (2009).
Wang, J. H., Wang, H., Thakor, N. V. & Lee, C. Self-powered direct muscle stimulation using a triboelectric nanogenerator (TENG) integrated with a flexible multiple-channel intramuscular electrode. ACS Nano 13, 3589–3599 (2019).
Liu, Z. et al. Wearable systems of reconfigurable microneedle electrode array for subcutaneous multiplexed recording of myoelectric and electrochemical signals. Adv. Sci. 12, e2409075 (2024).
Zhao, Q. et al. Highly stretchable and customizable microneedle electrode arrays for intramuscular electromyography. Sci. Adv. 10, eadn7202 (2024).
Agnot, K. C. et al. A temperature-responsive intravenous needle that irreversibly softens on insertion. Nat. Biomed. Eng. 8, 963–976 (2024).
Yang, M. et al. Highly-stable, injectable, conductive hydrogel for chronic neuromodulation. Nat. Commun. 15, 7993 (2024).
Liu, Y. X. et al. Soft and elastic hydrogel-based microelectronics for localized low-voltage neuromodulation. Nat. Biomed. Eng. 3, 58–68 (2019).
Strakosas, X. et al. Metabolite-induced in vivo fabrication of substrate-free organic bioelectronics. Science 379, 795–802 (2023).
Ikmi, A. et al. Feeding-dependent tentacle development in the sea anemone Nematostella vectensis. Nat. Commun. 11, 4399 (2020).
Fang, J. R. et al. Semi-implantable bioelectronics. Nano-Micro Lett. 14, 125 (2022).
Choi, B. J. et al. Parylene-based flexible microelectrode arrays for the electrical recording of muscles and the effect of electrode size. Appl. Sci. 10, 7364 (2020).
Lacour, S. P., Courtine, G. & Guck, J. Materials and technologies for soft implantable neuroprostheses. Nat. Rev. Mater. 1, 16063 (2016).
Thielen, B. & Meng, E. A. A comparison of insertion methods for surgical placement of penetrating neural interfaces. J. Neural Eng. 18, 041003 (2021).
Hawkes, E. W., Majidi, C. & Tolley, M. T. Hard questions for soft robotics. Sci. Robot. 6, eabg6049 (2021).
Lecomte, A., Descamps, E. & Bergaud, C. A review on mechanical considerations for chronically-implanted neural probes. J. Neural Eng. 15, 031001 (2018).
Strauss, I. et al. Q-PINE: a quick to implant peripheral intraneural electrode. J. Neural Eng. 17, 066008 (2020).
Yang, H. R. et al. Silk fibroin-based bioelectronic devices for high-sensitivity, stable, and prolonged in vivo recording. Biosens. Bioelectron. 267, 116853 (2025).
Roh, Y. et al. Transient shuttle for a widespread neural probe with minimal perturbation. NPJ Flex. Electron. 8, 40 (2024).
Zhou, Y. et al. A silk-based self-adaptive flexible opto-electro neural probe. Microsyst. Nanoeng. 8, 118 (2022).
Patel, R. et al. Neuroenhancement of surgeons during robotic suturing. Surg. Endosc. 36, 4803–4814 (2022).
Nam, S. et al. Needle-like multifunctional biphasic microfiber for minimally invasive implantable bioelectronics. Adv. Mater. 36, 2404101 (2024).
Lolis, M. S. & Goldberg, D. J. Radiofrequency in cosmetic dermatology: a review. Dermatol. Surg. 38, 1765–1776 (2012).
Sachdeva, S. & Dogra, A. Radiofrequency ablation In dermatology. Indian J. Dermatol. 52, 134–137 (2007).
Keum, H. et al. Tissue ablation: applications and perspectives. Adv. Mater. 36, 2310856 (2024).
Ihnát, P., Rudinská, L. I. & Zonca, P. Radiofrequency energy in surgery: state of the art. Surg. Today 44, 985–991 (2014).
Acknowledgements
This research was supported by the National Natural Science Foundation of China (grant numbers T2225010 (to X. Xie), 32171399 (to X. Xie), 32401202 (to S.H.) and 32171456 (to H.C.)), Guangdong Basic and Applied Basic Research Foundation (grant numbers 2023A1515011267 (to X. Xie) and 2023A1515111139 (to H.C.)), Science and Technology Program of Guangzhou, China (grant numbers 2024B03J0121 (to X. Xie) and 2024B03J1284 (to H.C.)), Shenzhen Science and Technology Innovation Program (grant number RCBS20231211090558093 to S.H.), China Postdoctoral Science Foundation (grant number 2023TQ0386 to S.H.) and Fundamental Research Funds for the Central Universities, Sun Yat-sen University (grant number 24xkjc011 to X. Xie).
Author information
Authors and Affiliations
Contributions
S.H., X.H. and C.Y. contributed equally to this work. S.H., X.H. and X. Xie conceived of the concept, designed the study and wrote the manuscript. S.H., X.H., F.Q., J.Y. and X.L. conducted most of the experiments. C.Y., S.L., C.Z., Jiayi Chen, Z.L., Minghao Li, G.L., L.H. and X. Xu performed the statistical analyses and assisted with graphics preparation. C.Y., F.Q., S.L., C.Z., G.L. and Jinkun Chen developed the AI model. Z.L. and L.H. developed the supporting circuits. C.Y., X.L., X. Xu, Minghao Li, Y.T., J.W., W.L., J.L. and H.C. assisted with and guided the cell and animal experiments. Mingqiang Li, Y.T., J.W., J.L., L.J. and H.C. revised and refined the manuscript. X. Xie supervised the study.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Sensors thanks Peng Shi, Yunlong Zhao and the other, anonymous, reviewer(s) for their contribution to the peer review of this work.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Extended data
Extended Data Fig. 1 Illustration of TFRFP-mediated soft implantation of FEHs for wearable in-tissue electrophysiology.
a, Optical microscopy showing the tip of a flexible Pt/Ir microelectrode. b, Snapshots showing failure of the Pt/Ir FEH to insert into fish tissue without TFRFP (RF = 0 W; left) versus its success mediated by TFRFP (RF = 15 W; right). The yellow dashed box marks the working electrode of the RF generator connected to the FEH and the red dots indicate the FEH tip’s position. c, Optical microscopy images of implanted Pt/Ir FEH withdrawn from the tissue. Top, top view image. The white dashed circle indicates the insertion site. Bottom, cross-sectional view. The white dashed outline shows the previous implantation position of FEH. d, SEM image showing the tip morphology of an implanted Pt/Ir FEH withdrawn from tissue. e, Photograph of a TFRFP-implanted four-channel FEH connected to an FPCB adaptor via anisotropic conductive adhesive. f,g, Optical microscopy (f) and SEM image (g) of uninsulated Pt/Ir FEH. h, Cross-sectional image of the interface between uninsulated FEH and tissue. i, Statistical analysis of the temperature changes in tissue regions during TFRFP implantation for uninsulated versus insulated FEHs of various lengths (n = 5 positions per group). j, COMSOL 3D model of the localized heat effect generated in tissue when RF was applied to the FEH. Three regions (A1, A2 and A3) in the tissue were defined. k, Snapshots of simulation results showing the tissue temperature distribution during TFRFP implantation (RF power: 0–25 W). l,m, Simulation results of the temperature changes in regions A1, A2 and A3 at 120 s during TFRFP implantation (RF power: 0–25 W) for insulated (l) and uninsulated FEHs (m) (n = 1 simulation). n, COMSOL 2D model of the mechanical insertion of FEH into tissue via TFRFP soft implantation. o, Snapshots of simulation results showing the tissue stress distribution during TFRFP implantation (RF power: 0–25 W). p, Required penetration forces of FEHs at different RF powers (n = 1 simulation). q, Schematic of the setup of the cellular experiment for evaluating the localized perforation effect of TFRFP. The cell viabilities in the three defined regions (A1, A2 and A3) were analysed. The data are representative of three independent experiments.
Extended Data Fig. 2 Demonstration of the versatility of TFRFP-implanted FEHs.
a, Optical microscopy image of a PCB FEH. b, Photographs of various FEHs (a Pt/Ir FEH, a Cu FEH and a PCB FEH) implanted into fish tissue via TFRFP. c Micro-CT image showing the cross-sectional morphology of a Cu FEH and a PCB FEH implanted into fish tissue via TFRFP. d,e, TFRFP-mediated implantation of insulated FEH into potato tissue (d) and an agarose model (e). The TFRFP implantation track (left), tissue temperature distribution (middle) and FEH–tissue cross-sectional interface (micro-CT; right) are presented. f, TFRFP implantation track and tissue temperature distribution for the FEH with a cryo-layer. g, Heatmaps showing the temperatures of regions at different depths (yellow dashed boxes in f) in FEHs with (left) and without a cryo-layer (right). The data are representative of three independent experiments.
Extended Data Fig. 3 Biocompatibility and biosafety of TFRFP soft implantation.
a, Photograph of rats implanted with FEHs performing a treadmill test at 25 m min−1. b, Volcano plot (left) and biocompatibility-related enriched Gene Ontology terms (middle) and KEGG pathways (right) of DEGs in the TFRFP group versus the HNA group. In the volcano plot, blue dots represent downregulated genes and red dots represent upregulated genes. In the Gene Ontology enrichment analysis results, red to grey colour bars represent significance levels. In the pathway enrichment analysis results, purple to grey colours represent significance. c–e, RNA sequencing results for the TFRFP group (c), HNA group (d) and HEI group (e) versus the blank control (Ctrl) group. Biocompatibility-related enriched Gene Ontology terms (top) and KEGG pathways (bottom) of DEGs in each group compared with the blank control are shown (n = 3 rats per group). f,g, Heatmap plots comparing the enrichment of Gene Ontology terms (f) and KEGG pathways (g) for the three implantation methods (that is, TFRFP, HNA and HEI) compared with the blank control group (n = 3 samples). Statistical significance in a and b was determined by one-way ANOVA with Tukey’s two-sided test (P < 0.001; P < 0.01; P < 0.05; P > 0.05).
Extended Data Fig. 4 Electrical performance of the TFRFP-implanted FEH.
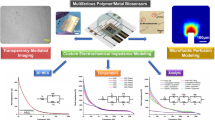
a, Equivalent circuit models for simulating the impedance curves of the FEH–tissue interface. b, Schematic of in vitro electrical signal recording and stimulation characterization. (i) A metal electrode served as the stimulation source, and the Pt/Ir FEH, implanted via the TFRFP or HNA method, was used for electrical signal recording. (ii) The TFRFP- or HNA-implanted Pt/Ir FEH served as the stimulation source, and a metal electrode was employed to record electrical signals. c, Simulation and experimental results showing the impedances of the FEH–tissue interfaces. d, Simulated EMG signals recorded by TFRFP- and HNA-implanted FEHs, using an actual recorded EMG signal as the signal source. e, Nyquist chart showing the tested impedances of Pt/Ir FEHs in K3[Fe(CN)6] solution, before and after withdrawal from tissue. f,g, In vitro characterization of electrical signal recording (f) and stimulation (g) at 5 and 1 Hz for TFRFP- (top) and HNA-implanted Pt/Ir FEHs (bottom) in fish tissue.
Extended Data Fig. 5 In vivo EMG recordings on rabbit models using HNA-implanted FEHs.
a, Photograph of repeated intramuscular EMG signal recordings on rabbit leg muscles via HNA-implanted Pt/Ir FEHs at multiple muscle sites, with induced sciatic nerve stimulation. b,c, EMG signal fragments (b) and power spectral densities (c) recorded over 4-h duration using HNA-implanted FEHs. d, Graphs comparing intramuscular EMG signals acquired at different muscle sites by TFRFP- and HNA-implanted Pt/Ir FEHs at different time points. e, Analysis of the EMG amplitude variation recorded by TFRFP-implanted FEHs during repeated recordings (n = 5 peaks per group). f, Power spectral densities recorded over time by TFRFP-implanted FEHs from different muscles of a rabbit’s leg during spontaneous and gentle leg movement.
Extended Data Fig. 6 Demonstration of TFRFP-implanted FEHs for intelligent prostheses application.
a, Representative action-track vectors of the foot joints, and the corresponding EMG signals and spectrograms recorded via four-channel FEHs. b, Representative action signals recorded by a single-channel FEH. Eight typical action samples are presented, each comprising a foot joint action trajectory vector alongside corresponding EMG signals and spectrograms. c,d, Unsupervised learning results of the CNN PCA cascade machine learning model under the multi- (c) and single-channel mode (d). e,f, Representative results demonstrating the application of single- (e) and four-channel FEHs (f) coupled with the AI model in action track prediction and robotic arm control. Several representative testing results show the output-predicted action trajectory compared with the actual action trajectory. g,h, Ankle endpoint (g) and action vector angle deviation statistics (h) between AI-predicted results and the actual action track (n = 6 testing samples for four-channel FEHs and n = 10 testing samples for single-channel FEHs).
Supplementary information
Supplementary Information (download PDF )
Supplementary Figs. 1–6, Tables 1–4 and Discussion.
Supplementary Video 1 (download MP4 )
TFRFP-assisted versus non-assisted FEH insertion in fish muscle.
Supplementary Video 2 (download MP4 )
TFRFP-assisted versus non-assisted FEH insertion in potato tissue.
Supplementary Video 3 (download MP4 )
TFRFP implantation of rhodamine B-dyed FEH for visualization.
Supplementary Video 4 (download MP4 )
TFRFP-mediated implantation of an FEH.
Supplementary Code 1 (download ZIP )
Unsupervised CNN PCA cascade model.
Supplementary Data 1 (download XLSX )
Statistical data for Supplementary Figs. 3 and 5–10.
Source data
Source Data Fig. 1 (download XLSX )
Statistical source data.
Source Data Fig. 2 (download XLSX )
Statistical source data.
Source Data Fig. 3 (download XLSX )
Statistical source data.
Source Data Fig. 4 (download XLSX )
Statistical source data.
Source Data Fig. 5 (download XLSX )
Statistical source data.
Source Data Fig. 6 (download XLSX )
Statistical source data.
Source Data Extended Data Fig. 1 (download XLSX )
Statistical source data.
Source Data Extended Data Fig. 2 (download XLSX )
Statistical source data.
Source Data Extended Data Fig. 3 (download XLSX )
Statistical source data.
Source Data Extended Data Fig. 4 (download XLSX )
Statistical source data.
Source Data Extended Data Fig. 5 (download XLSX )
Statistical source data.
Source Data Extended Data Fig. 6 (download XLSX )
Statistical source data.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Huang, S., Huang, X., Yao, C. et al. Soft implantation of flexible electronic hairs via tip-focused radiofrequency perforation for in-tissue electrophysiology. Nat. Sens. 1, 131–144 (2026). https://doi.org/10.1038/s44460-025-00004-0
Received:
Accepted:
Published:
Version of record:
Issue date:
DOI: https://doi.org/10.1038/s44460-025-00004-0
This article is cited by
-
Electronic hairs for prosthetic control
Nature Reviews Bioengineering (2026)
