
Abstract
While the mechanical strategies for increasing running speed on level ground (LG) have been well described, those used to increase speed on uphill (UH) and downhill (DH) grades have not been fully elucidated. The purpose of this study was to determine if the mechanical strategies for increasing speed during UH and DH running are different from those used on LG. Twelve recreational runners ran on LG and a 7.5° incline and decline at three speeds individualized to their 5k race pace. Inverse dynamics were used to calculate sagittal plane joint work during stance and swing phase. Repeated measures ANOVAs were used to test for differences in speed-induced changes in spatiotemporal and joint work variables between conditions. Compared to LG, increasing UH speed was achieved by greater increases in step frequency, swing phase positive and negative hip work, and swing phase negative knee work. Increasing DH speed required a smaller increase in swing phase positive hip and negative knee work compared to LG. This study highlights the grade-dependent roles of the lower extremity muscle groups for increasing running speed, particularly during swing phase, providing perspective on training targets for runners who compete on hilly terrain.
Similar content being viewed by others
Introduction
The mechanical strategies for increasing running speed on level ground (LG) have been well described. At slow to moderate running speeds (2.0–5.0 m/s), increasing speed is driven by greater stance phase energy generation from the ankle plantar flexors, contributing to longer step lengths1,2,3,4. At speeds > 5.0–6.0 m/s, stance phase positive ankle work plateaus and step length is limited1,4. As a result, these speeds must be achieved by increasing step frequency, requiring greater swing phase energy generation from the hip flexors to bring the leg forward and the hip extensors to return the leg toward the ground1,2,4,5. Few studies have evaluated the mechanisms for increasing speed when running uphill (UH) and downhill (DH)6,7,8. As many road races and training routes include hilly terrain, understanding the combined effect of speed and grade on running biomechanics may be important for guiding athlete training and making informed decisions for return to running after injury.
Compared to running on LG, running UH requires greater stance phase energy generation to raise the center of mass to a higher vertical position with each step8,9. This is primarily achieved by increasing energy generation from the hip extensors during stance phase10,11,12. Despite lower ground reaction forces in UH running, a longer external moment arm at the hip facilitates this increase in stance phase energy generation11. In contrast, little to no changes in energy generation at the ankle and knee occur in UH running compared to LG, likely due to the lack of significant changes in the external moment arm at these joints6,11,12. Shorter step lengths and higher step frequencies are also characteristic of UH running7. Due to the incline, the foot meets the running surface earlier than it does in LG running, resulting in a shorter flight time and step length7,13,14. As a result, step frequency is higher in UH running compared to LG in order to maintain the same speed while taking shorter steps7,15. Similar to running fast on LG, the increased step frequency required for UH running also results in greater energy generation from the hip during swing phase15.
Compared to LG and UH running, fewer mechanical differences exist between LG and DH running. Spatiotemporal parameters including step frequency, stride length, flight time, and swing time are not significantly different between LG and DH running7,13,16. The primary mechanical difference between LG and DH running is increased energy absorption through the lower limb system during DH running, particularly by the knee extensors10,12,16. As the center of mass descends with each step, energy generation requirements throughout the entire gait cycle are reduced8,9.
Vernillo et al. have provided a rather comprehensive description of the combined effects of running speed and grade on spatiotemporal parameters, ground reaction forces, muscle activation, joint kinematics, and joint kinetics across 0°, ± 5°, and ± 10° grades at 2.50, 3.33 and 4.17 m/s6,7. In summary, increases in UH running speed were achieved by greater increases in step frequency and stance phase energy generation at the hip compared to increasing speed on LG. Increases in DH running speed were achieved by spatiotemporal changes similar to LG, with greater increases in the rate of stance phase energy absorption at the knee with faster DH speeds. While these results provide insight into the mechanical demands of various speed and grade combinations, swing phase joint kinetics were not examined. Given the individual effects of speed and grade on swing phase mechanics, quantifying their combined effect is warranted2,15.
By evaluating spatiotemporal variables and joint kinetics during stance and swing phases of running, the purpose of this study was to determine if the mechanical strategies for achieving faster running speeds during UH and DH running are different from those used on LG. This study builds upon previous research by including an analysis of swing phase, which has not been included in previous studies investigating the combined effect of speed and grade on joint kinetics. Due to previous reports of greater changes in step frequency when increasing UH speed compared to LG, it was hypothesized that increasing UH speed would be achieved by greater increases in swing phase positive hip and negative knee work compared to increasing speed on LG4,7. Due to similar step frequency changes across speed for LG and DH running, no differences in swing phase kinetic changes were expected between LG and DH running.
Results
The average running speed for Speed 1, 2, and 3 were 3.23 ± 0.38, 3.44 ± 0.43, and 3.68 ± 0.49 m/s, respectively. Spatiotemporal averages for each grade and speed condition are displayed in Table 1; Fig. 1. Exemplar sagittal plane joint power curves for each grade and speed condition are displayed in Fig. 2. Stance and swing phase joint work averages for each grade and speed condition are displayed in Tables 2 and 3, respectively, and Fig. 3.

Effect of speed on mean spatiotemporal values for each grade condition. Error bars represent standard deviation. Speed 1: 5k pace + 1:00 min/mile; Speed 2: 5k pace + 0:30 min/mile; Speed 3: 5k pace.

Exemplar sagittal plane joint power curves for the hip, knee, and ankle during stance (A) and swing (B) phase for a single participant. LG is displayed in black, UH in blue, and DH in red. Speed 1 (5k pace + 1:00 min/mile) is displayed as a solid line, Speed 2 (5k pace + 0:30 min/mile) as dashed, and Speed 3 (5k pace) as dotted.

Level Ground vs. Uphill Running
Between the LG and UH conditions, no significant interaction effects were detected for change in spatiotemporal variables (p > 0.05). For all proceeding statistics, the effect degrees of freedom are 1 and the error degrees of freedom are 11. A significant main effect of grade was detected for change in step frequency (p = 0.048; F = 4.92; partial eta squared (ηp2) = 0.309), step length (p = 0.035; F = 5.81; ηp2 = 0.346), swing time (p = 0.029; F = 6.26; ηp2 = 0.363), and flight time (p = 0.028; F = 6.41; ηp2 = 0.368). Increasing UH running speed was achieved by a greater increase in step frequency, lesser increase in step length and flight time, and greater decrease in swing time compared to LG. On average, step frequency increased by 2.5 steps/minute (95% CI[1.0,4.0]) during LG and 5 steps/min (95% CI[2.0,7.0]) during UH running with each :30 min/mile increase in speed. Step length increased by 0.06 m (95% CI [0.05, 0.08]) on LG and 0.04 m (95% CI [0.03, 0.06]) on UH with each increase in speed. Swing time reduced by 1 ms (95% CI [−6, 3]) during LG running, and 9 ms (95% CI [−14, −3]) during UH running with each increase in speed. While flight time increased by 3 ms (95% CI[1.0,6.0]) with each increase in speed on LG, it did not change with increasing UH speed (mean difference: 0 ms; 95% CI [−2, 2]). Changes in contact time were not significantly influenced by grade or speed interval (p > 0.05). There were no significant main effects of speed interval for any spatiotemporal variable (p > 0.05).
No significant interaction effects nor main effects were detected for changes in stance phase joint work variables (p > 0.05). However, a significant main effect of grade was detected for change in swing phase negative hip work (p = 0.025; F = 6.77; ηp2 = 0.381), positive hip work (p < 0.001; F = 32.32; ηp2 = 0.746), and negative knee work (p = 0.002; F = 16.35; ηp2 = 0.598). On average, swing phase positive hip work increased by 0.064 J/kg (95% CI [0.050, 0.078]) during LG running and 0.118 J/kg (95% CI [0.094, 0.141]) during UH running with each :30 min/mile increase in speed. Swing phase negative hip work increased by 0.010 J/kg (95% CI [0.006, 0.015]) during LG running and 0.018 J/kg (95% CI [0.012, 0.025]) during UH running with each increase in speed. Swing phase negative knee work increased by 0.065 J/kg (95% CI [0.050, 0.079]) during LG running and 0.103 J/kg (95% CI [0.078, 0.127]) during UH running with each increase in speed.
Level Ground vs. Downhill Running
Between the LG and DH conditions, no significant interaction effects nor main effects of grade were detected for changes in spatiotemporal or stance phase joint work variables (p > 0.05). A main effect of speed interval was detected for change in step frequency only (p = 0.028; F = 6.44; ηp2 = 0.369), with a greater increase in step frequency from Speed 2 to 3 (mean difference: 4 steps/min; 95% CI[2.0,6.0]) compared to Speed 1 to 2 (mean difference: 1 step/min; 95% CI [0, 3]). A significant main effect of grade was detected for swing phase positive hip work (p = 0.008; F = 10.39; ηp2 = 0.486) and swing phase negative knee work (p = 0.027; F = 6.49; ηp2 = 0.371). On average, swing phase positive hip work increased by 0.064 J/kg (95% CI [0.050, 0.078]) during LG running and 0.041 J/kg (95% CI [0.028, 0.055]) during DH running with each :30 min/mile increase in speed. Swing phase negative knee work increased by 0.065 J/kg (95% CI [0.050, 0.079]) during LG and 0.051 J/kg (95% CI [0.037, 0.066]) during DH running with each increase in speed. A significant main effect of speed interval was detected only for swing phase negative knee work (p = 0.009; F = 10.12; ηp2 = 0.479), with a greater increase from Speed 2 to 3 (mean difference: 0.070 J/kg; 95% CI [0.055, 0.086]) than from Speed 1 to 2 (mean difference: 0.045 J/kg; 95% CI [0.030, 0.061). A significant grade-by-speed interval interaction effect was detected for swing phase negative ankle work (p = 0.021; F = 7.24; ηp2 = 0.397). However, it should be noted that the magnitude of swing phase negative ankle work across all conditions was near zero (Table 3).
Discussion
To determine whether the mechanical strategies for achieving faster running speeds on UH and DH are different from those utilized on LG, this study quantified spatiotemporal variables and joint work during stance and swing phase across a range of grades and submaximal running speeds. While stance phase joint work changed similarly across grades to increase speed, increasing UH and DH speed required significantly different changes in swing phase joint work compared to increasing LG speed. We accept our hypothesis that increasing UH speed is achieved by greater increases in swing phase positive hip and negative knee work compared to LG. We reject our hypothesis that no differences in swing phase joint kinetic changes exist between LG and DH running.
Consistent with previous studies, we found that increasing UH running speed is achieved by a greater increase in step frequency, and a smaller increase in step length and flight time compared to LG7,17. Additionally, swing time is reduced to a greater extent when increasing UH running speed compared to LG. On LG, increases in submaximal speeds are typically achieved by increasing step length to a greater extent than step frequency5. However, step length is limited during UH running due to earlier contact with the inclined surface, or to mitigate the greater amount of mechanical work that must be generated per step to raise the center of mass to a higher position7,10,13,17. Due to these step length constraints, more steps must be taken per minute to increase UH running speed. Since contact time is maintained across grades, this increase in step frequency must be achieved by swinging the leg forward more quickly to take the next step, resulting in a shorter swing time7,13,17. These mechanical changes mimic those of top-end sprinting on LG, where step length begins to plateau and step frequency increases at a higher rate4,5.
While a previous study identified a greater increase in stance phase positive hip work and lesser increase in stance phase positive ankle work to increase UH speed compared to LG, no effects of grade were found on stance phase joint work changes in the current study6. This difference in findings may be attributed to the smaller intervals between speeds in the current study (3.23, 3.44, and 3.68 m/s) compared to Khassetarash et al. (2.50, 3.33, 4.16 m/s)6. In the current study, the primary differences between LG and UH joint kinetic changes occurred during swing phase. Increasing UH running speed required a greater increase in swing phase negative and positive hip work and negative knee work compared to LG. This is tied to the strategy of increasing step frequency to a greater extent than step length when increasing UH running speed. As step frequency increases, more mechanical energy must be generated by the hip flexors to swing the leg forward, followed by the hip extensors in terminal swing to accelerate the leg toward the ground. In response to the increased energy generation over swing phase, more energy must be absorbed to decelerate the lower leg in terminal swing, resulting in a greater increase in negative knee work. Previous studies that describe the combined effect of grade and speed on running biomechanics have focused on stance phase, as it accounts for approximately 80% of the metabolic cost during running and incurs the greatest mechanical loads18. However, the hip and knee flexor muscle groups undergo the greatest mechanical loads during swing phase (Fig. 3). The current study offers new insights into the combined effect of speed and grade on these muscle groups, which carries implications for both training and rehabilitation. While the importance of knee extensor, plantar flexor, and hip extensor strengthening is often recommended for uphill athletes, our examination of swing phase suggests that training hip and knee flexor strength may also be beneficial to prepare for the mechanical demands of UH running, particularly at faster speeds6. This may be particularly relevant for athletes recovering from hamstring or hip flexor muscle-tendon injuries. Due to the greater increase in swing phase hip and knee work across speeds during uphill running, athletes recovering from hamstring or hip flexor injuries may benefit from reserving faster uphill running for the later stages of return to run.
Across all spatiotemporal variables, the magnitude of change in response to increased speed was not different between LG and DH conditions. Although an interaction effect was not detected, a greater increase in step frequency from Speed 2 to 3 appeared to be driven by the DH condition (Fig. 1; Table 1). Because running DH at faster speeds requires greater mechanical energy absorption at the knee, a greater increase in step frequency may be adopted to mitigate per-step negative knee work during stance6. Alternatively, this may be a result of being unaccustomed to running on a treadmill at a steep downhill grade. Visually, running DH on a treadmill is quite different than running on DH outside, as the surface just beyond the treadmill is flat. Rather than continuing to increase stride length at faster speeds, participants may elect to take shorter, quicker steps due to the visual interruption.
As with the LG vs. UH comparison, no effects of grade were identified for changes in stance phase joint work between LG and DH. Again, the primary differences between LG and DH kinetic changes occurred during swing phase, as faster DH speeds were achieved with smaller increases in swing phase positive hip and negative knee work. This is consistent with the overall reduction in energy generation requirements observed during DH running9,10. While swing phase negative ankle work increased slightly more during LG running compared to DH from Speed 1 to 2, negative ankle work is negligible during swing phase (Table 3) and this difference is not meaningful for practical applications.
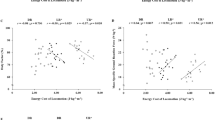
Differences in mechanical strategies for increasing speed were observed across participants in the current study. Some participants demonstrated a step frequency-dominant strategy, while others demonstrated a step length-dominant strategy. Figure 4 depicts two participants who ran at 3.16 m/s for Speed 1, 3.35 m/s for Speed 2, and 3.58 m/s for Speed 3. Subject 1 (filled markers) demonstrated a step length-dominant strategy across all grades, increasing step length by 0.10–0.18 m from Speed 1 to 3 with minimal changes in step frequency. Subject 2 (open markers) demonstrated a step frequency-dominant strategy, increasing step frequency by 9–14 steps/min from Speed 1 to 3 with minimal changes in step length. This illustration highlights that not all runners adhere to the commonly accepted mechanical strategies for increasing speed, and that runners may in fact switch strategies depending on the speed or grade. One possible influence on strategy selection is height of the runner; within our data set, Subject 1 was the tallest female participant (178 cm) and Subject 2 was the shortest female participant (157 cm). Other potential influences could be relative intensity, experience with treadmill and hill running, anthropometric factors, or muscle strength. Previous studies have demonstrated that runners tend to select step frequencies at or near the optimal oxygen cost, regardless of grade19. The difference in strategy selection may be due to participants choosing their most economical step frequency for the given speed and grade20. A recent study has also highlighted the role of lower extremity muscle strength on uphill and downhill running performance, suggesting that strength may influence the biomechanical strategies implemented by runners on challenging grades21. These factors cannot be investigated in the current study in the absence of metabolic and strength data. However, the individual strategies observed in the current study provide impetus for future studies to investigate factors underlying biomechanical strategy selection. While the most advantageous strategy cannot be confirmed by this study, coaches, trainers, and rehabilitation professionals should be aware that these different strategies exist when developing individualized training or rehabilitation programs.

Individual mechanical strategies for increasing speed across LG, UH, and DH. Subject 1 is represented by filled markers and Subject 2 is represented by open markers. Speed 1: 5k pace + 1:00 min/mile; Speed 2: 5k pace + 0:30 min/mile; Speed 3: 5k pace.
Some limitations should be considered when interpreting the results of this study. Weekly mileage, habitual surface (trail vs. treadmill vs. road), and experience with downhill treadmill running were not recorded for participants in this study. It is possible that these factors could influence the mechanical changes observed between running speeds, and future studies should account for this. Because participants had to run a minimum of only 5 miles per week to participate in this study, the findings may not be transferable to highly trained runners. The order of trials was not randomized due to the time required to change the grade and to allow a gradual warm up to faster speeds. Therefore, it is not possible to rule out the effect of trial order on the observed mechanical changes. Because the running trials were only 30 s in length (total of 6.5 min of running) and participants were habitual runners, it is unlikely that our findings were influenced by fatigue. However, previous studies have suggested that longer trials are likely needed for running biomechanics to stabilize22. Due to the steep grade used for the uphill condition, maintaining the faster speeds for much longer than 30 s would not have been feasible. The results of this study are more likely to be applicable for understanding the short and frequent changes in running speed that occur when running on variable terrain. Rather than prescribing fixed test speeds for all participants, speeds were assigned based on each participant’s self-reported current 5k race pace. The rationale for this strategy was to control for any mechanical differences that may be imposed by constraining participants to speeds that are faster or slower than their typical training paces. However, as current 5k pace was self-reported, it is possible that a uniform effort level was not maintained across participants. The small intervals between test speeds may minimize any potential differences in stance phase joint work changes. However, these speeds were selected to represent speeds that are most utilized by recreational runners during training. Because only one grade was analyzed, it is not clear at which grade mechanical strategies for increasing speed become different from LG. Finally, it should be noted that this analysis was performed following the conclusion of a larger study which limited the available sample size to 12 participants. While this sample size provided sufficient power for the primary swing phase joint work outcomes, the study was underpowered for primary spatiotemporal variables. The sample size also limits the ability to detect sex-based differences in mechanics.
In conclusion, this study demonstrates that different mechanical strategies are utilized to increase UH and DH speed compared to LG. Increasing UH speed is achieved by greater increases in step frequency and lesser increases in step length, requiring greater swing phase energy generation at the hip and energy absorption at the knee. Increasing DH speed requires a lesser increase in swing phase energy generation at the hip and energy absorption at the knee, with no differences in spatiotemporal parameters compared to LG. Different strategies for increasing speed are observed across participants, as some preferentially increased step frequency and others increased step length. Coaches, trainers, and rehabilitation professionals should be aware of the various strategies used to increase LG, UH and DH running speed in order to better individualize training, injury prevention, and rehabilitation programs for runners.
Methods
Research participants
Twelve healthy recreational runners (7 female/5 male), age: 24.4 ± 7.7 year., mass: 63.2 ± 10.0 kg, height: 171.0 ± 9.7 cm) provided written informed consent and volunteered to participate in this study. Participants were required to be between 18 and 65 years old to enroll in this study, though the age range of participants in this analysis was 18–41 years old which minimizes the effect of age on biomechanics23. Participants were not eligible to participate if they ran less than 5 miles per week or were currently experiencing a running related injury. All research protocols were approved by the University of Oregon Institutional Review Board (10062020.007). All research was performed according to relevant guidelines and regulations, in accordance with the Declaration of Helsinki.
Data collection
Participants completed a total of thirteen 30 s running trials on a split-belt force-instrumented treadmill (Bertec, Columbus, OH) with an 8-camera motion capture system (Motion Analysis Corp., Rohnert Park, CA). Participants wore their typical training shoes, none of which were carbon fiber-plated. Running speed was based on each participant’s self-reported current 5k race pace. Five 30 s trials were performed on level ground (LG) in the following order: 1:30 min/mile (0:55 min/km) slower than 5k pace, 1:00 min/mile (0:37 min/km) slower than 5k pace, 0:30 min/mile (0:18 min/km) slower than 5k pace, 5k pace, and 0:30 min/mile faster than 5k pace. Four 30 s trials were performed on a 7.5° (13% grade) incline and decline in the following order: 1:30 min/mile, 1:00 min/mile, and 0:30 min/mile slower than 5k pace, and at 5k pace. The LG trials were completed first, followed by incline, then decline. As this analysis was part of a larger study which aimed to develop a machine learning algorithm for indoor and outdoor classification of running gait events, the 13% grade was selected to match the grade of an outdoor hill local to the laboratory. Participants straddled the treadmill while the belt was brought up to the target speed, then ran on the treadmill for 30s. Participants were given at least 30 s of rest between each trial. Because several subjects were not comfortable completing the UH trial at 5k pace due to the fast speed and steep grade, only the speeds slower than 5k pace were considered for this analysis.
Forty-five retroreflective markers were affixed to the pelvis and bilateral lower extremities, including the sacrum, anterior superior iliac spine, posterior superior iliac spine, greater trochanter, clusters of 4 thigh markers and 4 shank markers each on a semi-rigid plate, medial and lateral epicondyles of the knee, medial and lateral malleoli, superior, inferior, and lateral aspects of the calcaneus, 1 st and 5th metatarsal heads, dorsum of the foot, and the distal phalanx of the great toe. After a static trial was captured, the greater trochanter, epicondyle, and malleoli markers were removed. Five markers were placed on the corners of the treadmill surface to track the position of the treadmill and force platforms during the UH and DH trials. Marker trajectory data were collected at a sampling frequency of 200 Hz and ground reaction force data were collected at a sampling frequency of 1000 Hz. The middle 10 s of each 30 s trial were used for analysis.
Data analysis
Markers were labeled according to anatomical landmarks, and marker trajectory gaps were filled using a cubic spline function in Cortex software (Motion Analysis Corp., Rohnert Park, CA). The remainder of the analysis was performed in Visual 3D (HAS-Motion, Kingston, Ontario, CA). Static trials were used to define anatomic coordinate systems for the pelvis, thigh, shank, and foot, each modeled as a rigid body. Hip joint centers were estimated using inter-ASIS distance, based on the regression equations from Bell and Brand24. Knee and ankle joint centers were defined as the midpoint between the femoral epicondyles and malleoli, respectively. A Cardan rotational sequence (x-y-z) was used for angular calculations, where x was the mediolateral axis, y was the anteroposterior axis, and z was the vertical axis. Segment mass was estimated using mass proportions reported by Dempster and inertial properties for each segment were estimated based on segment mass and length25. The pelvis was modeled as a cylinder and all other segments were modeled as cones, with proximal and distal segment radii estimated as one-half the distance between medial and lateral joint markers. Segment center of mass and mass moments of inertia were estimated using segment mass and geometry.
Marker trajectories and ground reaction forces were filtered using 4th -order low pass Butterworth filters with 6 and 15 Hz cutoff frequencies, respectively. Cutoff frequencies were selected based on residual analyses to minimize noise and maximize true signal passed by the filter26. Baseline analog signals from the force platforms were subtracted from each frame using the “FP Auto Baseline” function in Visual 3D. Initial contact and toe off were identified using the “Automatic Gait Events” function in Visual 3D, with a 50 N force threshold. Gait events were used to calculate step frequency, stance and swing time, and step length. Three-dimensional joint power for the right hip, knee, and ankle was calculated as the dot product of internal joint moment and joint angular velocity, and was normalized to body mass. Positive and negative joint work were calculated as the time integral of the positive and negative portions of the power-time curves, respectively. Stance and swing phase work were calculated separately to analyze the mechanical demands of each joint during these two phases of the running gait cycle. Because sagittal plane joint work accounts for 89% of total lower extremity work during running, only sagittal plane joint work was analyzed10.
Statistical analysis
The average and standard deviation of each variable were calculated for the middle 10 s of each trial. Speed categories were defined as Speed 1 (1:30 min/mile slower than 5k pace), Speed 2 (1:00 min/mile slower than 5k pace), and Speed 3 (:30 min/mile slower than 5k pace). For each variable, the mean difference between Speed 1 and Speed 2 and between Speed 2 and Speed 3 were calculated within each grade. Approximate normality was assessed graphically by comparing histograms of mean differences for each variable to the normal distribution curve. Two-way repeated measures ANOVAs (2 grades x 2 speed intervals, n = 12) were performed in SPSS (IBM Corp., Armonk, NY) with mean differences as the dependent variables. Separate tests were conducted to compare LG to UH and DH. Mauchly’s test was used to assess sphericity, and Greenhouse-Geiser corrections were applied when the sphericity assumption was not met. When significant interactions were detected, the Bonferroni correction was applied to post hoc simple main effects. For significant main effects, the Bonferroni correction was applied to two-tailed pairwise post hoc tests. Alpha levels were set to 0.05, and corrected p-values < 0.05 were determined to be statistically significant.
Data availability
The datasets analyzed during this study are available from the corresponding author on reasonable request.
References
Schache, A. G., Brown, N. A. T. & Pandy, M. G. Modulation of work and power by the human lower-limb joints with increasing steady-state locomotion speed. J. Exp. Biol. 218, 2472–2481. https://doi.org/10.1242/jeb.119156 (2015).
Schache, A. G. et al. Effect of running speed on lower limb joint kinetics. Med. Sci. Sports Exerc. 43 (7), 1260–1271. https://doi.org/10.1249/MSS.0b013e3182084929 (2011).
Jin, L. & Hahn, M. E. Modulation of lower extremity joint stiffness, work and power at different walking and running speeds. Hum. Mov. Sci. 58, 1–9. https://doi.org/10.1016/j.humov.2018.01.004 (2018).
Willer, J., Allen, S. J., Burden, R. J. & Folland, J. P. How humans run faster: the neuromechanical contributions of functional muscle groups to running at different speeds. Scandinavian Med. Sci. Sports. 34 (8), 1–16. https://doi.org/10.1111/sms.14690 (2024).
Weyand, P. G., Sternlight, D. B., Bellizzi, M. J. & Wright, S. Faster top running speeds are achieved with greater ground forces not more rapid leg movements. J. Appl. Physiol. 89 (5), 1991–1999. https://doi.org/10.1152/jappl.2000.89.5.1991 (2000).
Khassetarash, A. et al. Biomechanics of graded running: part II—Joint kinematics and kinetics. Scandinavian Med. Sci. Sports. 30 (9), 1642–1654. https://doi.org/10.1111/sms.13735 (2020).
Vernillo, G. et al. Biomechanics of graded running: part I - Stride parameters, external forces, muscle activations. Scandinavian Med. Sci. Sports. 30 (9), 1632–1641. https://doi.org/10.1111/sms.13708 (2020).
Dewolf, A. H., Peñailillo, L. E. & Willems, P. A. The rebound of the body during uphill and downhill running at different speeds. J. Exp. Biol. 219, 2276–2288. https://doi.org/10.1242/jeb.142976 (2016).
Snyder, K. L., Kram, R. & Gottschall, J. S. The role of elastic energy storage and recovery in downhill and uphill running. J. Exp. Biol. 215, 2283–2287. https://doi.org/10.1242/jeb.066332 (2012).
DeVita, P., Janshen, L., Rider, P., Solnik, S. & Hortobágyi, T. Muscle work is biased toward energy generation over dissipation in non-level running. J. Biomech. 41 (16), 3354–3359. https://doi.org/10.1016/j.jbiomech.2008.09.024 (2008).
Roberts, T. J. & Belliveau, R. A. Sources of mechanical power for uphill running in humans. J. Exp. Biol. 208, 1963–1970. https://doi.org/10.1242/jeb.01555 (2005).
Telhan, G. et al. Lower limb joint kinetics during moderately sloped running. J. Athl. Train. 45 (1), 16–21. https://doi.org/10.4085/1062-6050-45.1.16 (2010).
Gottschall, J. S. & Kram, R. Ground reaction forces during downhill and uphill running. J. Biomech. 38 (3), 445–452. https://doi.org/10.1016/j.jbiomech.2004.04.023 (2005).
Okudaira, M. et al. Three-dimensional com energetics, pelvis and lower limbs joint kinematics of uphill treadmill running at high speed. J. Sports Sci. 38 (5), 518–527. https://doi.org/10.1080/02640414.2019.1710923 (2020).
Swanson, S. C. & Caldwell, G. E. An integrated Biomechanical analysis of high speed incline and level treadmill running. Med. Sci. Sports Exerc. 32 (6), 1146–1155. https://doi.org/10.1097/00005768-200006000-00018 (2000).
Park, S. K., Jeon, H. M., Lam, W. K., Stefanyshyn, D. & Ryu, J. The effects of downhill slope on kinematics and kinetics of the lower extremity joints during running. Gait Posture. 68, 181–186. https://doi.org/10.1016/j.gaitpost.2018.11.007 (2019).
Padulo, J., Annino, G., Migliaccio, G. M., D’Ottavio, S. & Tihanyi, J. Kinematics of running at different slopes and speeds. J. Strength. Conditioning Res. 26 (5), 1331–1339. https://doi.org/10.1519/JSC.0b013e318231aafa (2012).
Arellano, C. J. & Kram, R. Partitioning the metabolic cost of human running: A Task-by-Task approach. Integr. Comp. Biol. 54 (6), 1084–1098. https://doi.org/10.1093/icb/icu033 (2014).
Snyder, K. L. & Farley, C. T. Energetically optimal Stride frequency in running: the effects of incline and decline. J. Exp. Biol. 214, 2089–2095. https://doi.org/10.1242/jeb.053157 (2011).
Giovanelli, N., Ortiz, A. L. R., Henninger, K. & Kram, R. Energetics of vertical Kilometer foot races; is steeper cheaper? J. Appl. Physiol. 120 (3), 370–375. https://doi.org/10.1152/japplphysiol.00546.2015 (2016).
Lemire, M. et al. Physiological factors determining downhill vs uphill running endurance performance. J. Sci. Med. Sport. 24 (1), 85–91. https://doi.org/10.1016/j.jsams.2020.06.004 (2021).
Lavcanska, V., Taylor, N. F. & Schache, A. G. Familiarization to treadmill running in young unimpaired adults. Hum. Mov. Sci. 24 (4), 544–557. https://doi.org/10.1016/j.humov.2005.08.001 (2005).
Klein, M. & Patterson, C. Changes in running biomechanics in master runners over age 50: a systematic review. Sports Biomechanics Published Online June. 23, 1–29. https://doi.org/10.1080/14763141.2023.2226139 (2023).
Bell, A. L., Brand, R. A. & Pedersen, D. R. Prediction of hip joint centre location from external landmarks. Hum. Mov. Sci. 8 (1), 3–16. https://doi.org/10.1016/0167-9457(89)90020-1 (1989).
Dempster, W. T. Space requirements of the seated operator: geometrical, kinematic, and mechanical aspects of the body with special reference to the limbs. Published online 1955.
Winter, D. Biomechanics and Motor Control of Human Movement 4th edn (Wiley, 2009).
Acknowledgements
The authors would like to thank Sofia Lee, Anya Anand, Kayla Smith, Austin Mohler, and Bridget Baur for their assistance with data collection and post-processing. This work was supported by Casio Computer Co., LTD under Industry Sponsored Research Agreement No. 30757, the Wu Tsai Human Performance Alliance and the Joe and Clara Tsai Foundation.
Author information
Authors and Affiliations
Contributions
S.D. and M.H. designed the study protocol, S.D., R.R., and A.C. conducted the data collections, R.R. analyzed the results and prepared figures. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Robinson, R.M., Donahue, S.R., Chebbi, A. et al. Biomechanical strategies to achieve faster running speeds on level ground, uphill and downhill grades. Sci Rep 15, 33917 (2025). https://doi.org/10.1038/s41598-025-09968-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-09968-y
