
Abstract
Directional Overcurrent Relay (DOCR) coordination has become an increasingly important problem in modern distribution networks, where growing system complexity and high fault-current variability demand fast and highly selective protection strategies. With the widespread integration of smart grids and renewable energy sources, determining relay settings accurately and in an optimized manner is critical to maintaining system reliability. This study aims to systematically evaluate the effectiveness of five advanced generation metaheuristic algorithms (Zebra Optimization Algorithm (ZOA), African Vultures Optimization Algorithm (AVOA), Transit Search Optimization (TSO), Nutcracker Optimization Algorithm (NOA), and Artificial Rabbits Optimization (ARO)) for minimizing the total primary relay operating time. In this context, the DOCR coordination problem is formulated as an optimization task in which the Time Multiplier Setting (TMS) and Pickup Setting (PS) are jointly tuned under inverse time–current characteristics. A standard and reproducible MATLAB/Simulink-based analysis framework is established, and the three-phase short-circuit fault scenario that produces the highest fault current is consistently applied to the IEEE 3-, 8-, and 15-bus test systems. To ensure the reliability of the findings, multiple repeated simulations are performed and the results are statistically validated. The numerical results show that ARO achieves the lowest total primary relay operating time in both the IEEE 3-bus (0.23 s) and 8-bus (2.86 s) systems compared with the other algorithms considered (ZOA, AVOA, TSO, and NOA), while NOA provides the best performance in the 15-bus system with a total operating time of 5.25 s, outperforming ARO, ZOA, AVOA, and TSO. When compared with classical and other heuristic methods reported in the literature for the same or similar test systems, the proposed advanced algorithms reduce the total primary relay operating time by approximately 60% to 97%, while still satisfying the selectivity requirements. Furthermore, the results indicate that algorithm performance is sensitive to network scale and topology: ARO is more effective in small and medium-sized systems, NOA performs better in larger systems, and TSO exhibits balanced behaviour across all test systems. Overall, the findings demonstrate that advanced metaheuristic algorithms provide effective, scalable, and reliable solutions for DOCR coordination, highlighting their high applicability potential in future protection schemes for smart-grid and renewable-integrated distribution networks.
Similar content being viewed by others

Introduction
Faults in electric power systems can cause severe equipment damage, destabilize the grid, and trigger widespread outages. Ensuring safe, stable, and uninterrupted operation therefore hinges on reliable protection schemes that isolate faults selectively and promptly. In practice, overcurrent relays (OCRs), circuit breakers, reclosers, and fuses must act in a coordinated, time graded manner so that only the faulted section is removed and as quickly as possible.
As power systems evolve toward greater renewable penetration and smart-grid operation, the role of advanced, adaptive protection becomes even more critical. Strategies must preserve conventional reliability while accommodating the variability and uncertainty introduced by distributed generation and renewable sources. Accordingly, protection philosophies should remain selective and fast, yet robust to topology reconfiguration, bidirectional power flows, and uncertainty. Recent distribution-level optimization studies align with this need: Dynamic AOA under load uncertainty and chaotic quasi-oppositional AOA for techno economic DG allocation have been shown to improve operating objectives under realistic constraints1,2.
With the increasing integration of distributed generation (DG) into distribution systems, traditionally radial networks are being reshaped into more complex, often meshed topologies with bidirectional power flow. This structural change alters both the direction and magnitude of fault currents, thereby undermining the reliability and selectivity of conventional protection schemes3,4.
In such configurations, directional overcurrent relays (DOCRs) offer more effective protection than conventional OCRs3. While OCRs detect overcurrent in a single direction, DOCRs are sensitive to current direction and can function as both primary and backup elements. Their operation depends on two key settings: the Time Dial Setting (TDS) and the Pickup Setting (PS). TDS governs the relay’s operating time once a fault is detected, whereas PS defines the current threshold at which the relay picks up. Lower TDS values yield faster response but can jeopardize selectivity; higher TDS values improve selectivity at the cost of longer clearing times. Similarly, a low PS increases sensitivity but can cause maloperation under temporary overloads5,6. Consequently, optimal TDS and PS selection under coordination constraints is central to practical DOCR deployment.
DOCRs operate without intentional delay at the faulted location as primary protection; if the primary fails, backup relays trip after a prescribed delay. This arrangement provides a layered protection strategy, but its effectiveness depends on proper coordination among relays. The goal is to minimize the total operating time of primary relays while avoiding overlap between primary–backup pairs5. To this end, settings are chosen to satisfy a minimum Coordination Time Interval (CTI), typically in the range of 0.1–0.5 s depending on relay type, breaker response, tolerances, and safety margins3. These practical bounds motivate a constrained optimization formulation for DOCR coordination.
Historically, parameters such as TDS and PS were determined manually a labor intensive and often suboptimal process. Conventional practice performs fault studies, reduces meshed networks to radial equivalents, starts from the farthest relay, and then configures backups iteratively. In this workflow, the selection of “breakpoint” relays identified via graph-theoretic criteria directly affects the resulting TDS/PS settings. However, in large-scale, multi-source, looped networks, deterministic methods are prone to local minima in nonlinear, high-dimensional search spaces and frequently fail to achieve truly optimal solutions6. Hence, there is a clear need for robust, scalable optimization approaches that preserve selectivity while minimizing operating time. Complementary evidence from Arithmetic Optimization family studies baseline AOA and oppositional AOA for simultaneous feeder reconfiguration with DG/capacitor placement reports consistent loss reduction and voltage profile improvement in radial networks7,8.
Motivation and purpose
To overcome the limitations of conventional methods, interest in nature-inspired metaheuristic optimization has grown markedly in recent years. Drawing on biological and physical analogies, these algorithms offer flexible, fast, and effective search capabilities, and thus constitute strong candidates for solving the DOCR coordination problem3,4. Building on this trajectory, the present paper focuses on advanced optimizers whose systematic assessment for DOCR remains limited. In parallel, recent applications of modern swarms in power-system optimization APSOLF for maximum loadability enhancement9, SAPSO for PV-interfaced SSSC tuning10, an adaptive-swarm method for reduced-switch 11-level inverter control11, and SPAPSOLF for efficient series compensation and loadability improvement12 further motivate our choice to evaluate contemporary algorithms for DOCR under identical objectives and CTI constraints. Accordingly, we aim to deliver a principled, head-to-head comparison of recent optimizers within a unified coordination framework (common objective, constraints, and test systems).
According to the literature, the most prevalent short-circuit faults in electric power systems are single line-to-ground (L-G), double line-to-ground (L-L-G), line-to-line (L-L), and three-phase (L-L-L) faults13,14. Although the three-phase fault is relatively rare, it produces the highest short-circuit current and therefore represents the most severe operating condition for protection assessment. To enable fair, benchmarking across networks and algorithms, we consistently adopt this worst-case three-phase scenario in all studies.
Under this fault setting, we evaluate protection performance using key criteria selectivity, total operating time, and response speed. We thus assess the effectiveness of AVOA, ARO, NOA, ZOA, and TSO across multiple system sizes under three-phase faults, and compare them holistically with widely used optimization techniques reported in the literature. Our overarching goal is to identify algorithm–system-size pairings that achieve lower primary-relay operating times without violating CTI based selectivity.
Contributions
The main and original contributions of this study are summarized below.
-
Unified and reproducible benchmarking framework: Under IEC/IEEE standard inverse time–current characteristics and strict selectivity criteria, the three-phase short-circuit scenario representing the worst case for protection was applied consistently on the IEEE 3-, 8-, and 15-bus systems. The TMS–PS pair was jointly optimized in MATLAB/Simulink using common parameter bounds, fixed iteration budgets, and identical initial conditions to ensure comparability and reproducibility of results.
-
Joint TMS–PS optimization with constraint management: TMS and PS were optimized together to preserve selectivity while minimizing total operating time. To prevent parameter overflow and maintain implementable relay settings, a dynamic constraint-handling scheme was employed: at each iteration predefined lower–upper bounds were checked, and any violations were automatically corrected via boundary reflection and proportional rescaling. This preserved search diversity and yielded physically meaningful, field-deployable settings.
-
Multi-scale system analysis: The proposed algorithms were evaluated on small (IEEE 3-bus), medium (IEEE 8-bus), and large (IEEE 15-bus) test systems, enabling a systematic assessment of sensitivity to network size, topological complexity, and number of protection zones, and revealing scale-dependent trends in optimization efficiency.
-
Numerical performance gains: Across all three test systems, substantial reductions in total relay operating times were achieved. Based on the paper’s comparisons, the best-performing methods delivered meaningful improvements of approximately 60% to 97% relative to methods reported in the literature (range depending on the system).
-
Topology/scale sensitivity of algorithms: Results show that algorithms respond differently to network size and complexity: ARO stands out on small and medium systems, NOA achieves the lowest total time on the large system, and TSO exhibits balanced, stable performance across all scales. These findings highlight the importance of matching the algorithm to the system structure to improve selectivity and clearing times.
-
Practical protection impact: Even under the worst-case three-phase short-circuit condition that yields the highest fault current, reducing total clearing times while preserving selectivity (CTI) mitigates mis operations and enhances system reliability and stability. The resulting TMS–PS settings remain within practical ranges, facilitating direct deployment under real operating conditions and helping reduce equipment stress and outage durations. The approach is readily adaptable to modern distribution networks with DG/renewable integration.
-
Extensible MATLAB/Simulink infrastructure: The experimental setup is modular, comprising shared parameter files, a fault-scenario generator (three-phase short circuit), a constraint-handling module, and standardized output/reporting steps. New algorithms can be added in a plug-and-play fashion; different IEC/IEEE inverse characteristics and CTI targets can be tested; and the framework scales from the 3-,8-,15-bus topologies to larger networks. By keeping initial conditions, iteration budgets, and bounds consistent, results remain reproducible, while exported TMS–PS setting files and performance metrics (total time, selectivity checks, etc.) are generated automatically. The infrastructure is organized to bridge toward real-time (HIL) applications.
Literature review
Optimal coordination of directional overcurrent relays (DOCRs) is essential for selective, fast, and reliable protection. To address the limitations of classical deterministic techniques in complex networks, numerous heuristic and metaheuristic methods have been applied to IEEE test systems of varying sizes, with the goal of determining suitable Time Dial Setting (TDS) and Pickup Setting (PS) values under coordination constraints.
Among early contributions, the Adaptive Fuzzy Directional Bat Algorithm (AFDBA) demonstrated superior speed and coordination accuracy on the IEEE 3-, 9-, and 30-bus systems relative to Genetic Algorithm (GA), Particle Swarm Optimization (PSO), Differential Evolution (DE), Bat Algorithm (BA), and Directional BA (DBA)15. Harris Hawk Optimization (HHO) likewise improved DOCR settings on IEEE 9-, 14-, and 15-bus systems compared with conventional baselines16. Using a piecewise linear characteristic (PWLC) modeling approach, relay operating times were reduced by up to 72% in small networks and 90% in large networks on the IEEE 8-, 14-, and 39-bus benchmarks17. A hybrid protection strategy combining a zero-impedance fault current limiter (ZFCL) with adaptive DOCR coordination–optimized via GWO–reported faster and more reliable operation in renewable-integrated feeders18. PSO-based hybrids achieved improvements of up to 74.9% on the IEEE 4-, 6-, and 8-bus systems19, while sensitivity analyses showed that a Modified Adaptive PSO (MAPSO) reduced the total operating time from 6.169 s to 4.331 s20. Complementary work proposed a communicationless coordination scheme that remained dependable under DG penetration and fault-repair periods on a real Egyptian distribution network21. In parallel, a positive-sequence impedance–based directional protection method that uses instantaneous voltage–current samples to construct a Z-matrix was shown to accurately classify fault direction across a wide range of scenarios–including high-resistance, far-end, cross-country faults, CT saturation, PFC, SPT, noise, and frequency variations–demonstrating robust performance compared with conventional directional schemes22. Building on clustering concepts, another recent contribution proposed an adaptive protection scheme that employs K-means, hierarchical, and spectral clustering to classify operating conditions and uses GA and Tug-of-War optimization to fine-tune relay parameters, achieving faster and more selective tripping across twenty network topologies with HIL-validated performance under standard and non-standard OCR characteristics23.
Quantum-inspired designs have also been explored: the Quantum-Inspired Adaptive Walrus Optimization Algorithm (QIAWOA) achieved lower operating times and higher accuracy on the IEEE 3-, 8-, and 15-bus systems (and CEC 2020 functions) by jointly optimizing TDS and PS24. The Modified Electromagnetic Field Optimization (MEFO) algorithm reduced operating time and improved coordination success on the IEEE 8-, 9-, and 15-bus networks25. Addressing uncertainty explicitly, a dual-setting relay scheme supported by Weibull modeling and fuzzy Monte Carlo simulation–optimized via Ant Lion Optimization (ALO)–yielded more robust coordination on the IEEE 14- and 30-bus systems26. In a broader formulation that minimizes DOCR operating time and primary–backup coordination time, a fractional PSO–GSA–entropy metric (FPSOGSA-EM) jointly optimized CTI, PS, and TDS on the IEEE 3-, 8-, and 15-bus systems, delivering faster convergence and significant reductions in total operating time with statistically validated consistency27. Additional studies include Manta Ray Foraging Optimization (MRFO) with a restructured objective on the 9- and 15-bus systems (plus an adaptive scheme validated on a 10-bus DG-integrated feeder in Hatay, Türkiye)28, and War Strategy Optimization (WSO), which produced shorter operating times and stronger global optima on multi-loop systems than GA, RTO, and JAYA29. Another recent contribution30 proposed an Improved Hyper Spherical Search Algorithm (IHSSA) for relay coordination in a hybrid wind–solar distribution grid modeled as a 220/6.6 kV substation with multiple feeders and RES units; compared with GA, PSO, and other benchmark methods, IHSSA achieved about an 18% reduction in relay operating time, a 15% improvement in coordination margin, and fault-clearing settling times down to 120 ms, with its practical viability further confirmed through OPAL-RT hardware-in-the-loop tests using IEC-61850-compatible relays. Likewise, a comparative study31 investigated OCR coordination in the IEC microgrid benchmark using non-standard relay characteristics, where the Sine Cosine Algorithm (SCA) and a modified Whale Optimization Algorithm were employed to optimize TMS values under multiple operating modes; compared with GA-based reference solutions, SCA achieved noticeably lower total operating times in all grid-connected and islanded modes while maintaining CTI \(\ge 0.3\) s, whereas the modified WOA provided acceptable coordination but more limited improvement in operating time. An improved walrus optimizer that incorporates chaotic initialization, oppositional mutation, and a modified exploration update rule to overcome the weak exploration behavior of the original WO was also proposed; tested on the 8-, 15-, IEEE 30-, and New England 39-bus systems, the variant demonstrated clear superiority in minimizing relay operating times under highly constrained DOCR coordination settings32. A recent 33-bus comparison across GA, BHA, and LCA reported the lowest total operating time and stable convergence for LCA33. Collectively, these studies illustrate a shift from single-paradigm classical methods toward hybrid, adaptive, and physics-inspired formulations that better navigate nonconvex coordination landscapes. In a related development, a more recent study proposed a clustering-based protection coordination framework for real distribution microgrids, combining a network-variation-based clustering technique, novel objective functions, and a hybrid NSGA-III/goal-attainment algorithm supported by linear programming; applied to the NOAVARAN feeder and the IEEE 14-bus system, this approach eliminated miscoordination and achieved approximately 50–60% reductions in relay operating times compared with other mixed algorithms that do not use linear programming34.
Beyond protection coordination in the strict sense, oppositional-based Artificial Rabbits Optimization has shown robustness in PMU placement (improving observability) and nonlinear DG siting under THD limits, underscoring resilience under measurement and power-quality constraints35,36. A recent study37 introduced a new dynamic fitness–distance balance (dFDB) selection strategy to strengthen meta-heuristic search and applied the resulting algorithm to the DOCR coordination problem; after extensive benchmarking on multiple test suites, the developed method was tested on five systems–including the IEEE 3-, 4-, 8-, 9-, and 30-bus networks–and consistently achieved lower relay operating times compared with previously reported algorithms. Building on DG-aware formulations, another recent contribution38 introduced a unified GA-based approach in which dual DOCR settings, relay operating characteristics, and the penetration, type, and location of DG units are determined simultaneously under relay coordination, power-quality, and loss-minimization constraints; applied to the IEEE 14-bus system and a real network, this method achieved about 20.8% reduction in total relay operating time, a maximum DG penetration of 92.9% of the load, and 83.3% reduction in active power losses compared with the base case. A complementary study39 addressed DOCR coordination in radial networks with inverter-based distributed energy resources by formulating a multi-objective protection model and solving it with an improved multi-objective PSO and decision-making framework, achieving lower relay operating times and better overall coordination than conventional approaches.
Within the broader context of microgrid protection, one related study introduced an adaptive microgrid protection scheme that uses a pickup-scaling coefficient to adjust DOCR settings based on local measurements, enabling a single optimal setting set to maintain consistent operating times and CTIs across grid-connected, islanded, line-outage, and DG-outage topologies; extensive simulations and CHIL tests on a modified IEEE 13-bus system confirmed improved sensitivity, selectivity, and reliability under diverse DG injections40. Another related study41 proposed a similar adaptive microgrid protection scheme based on a pickup-scaling coefficient and validated its performance by showing that consistent CTIs and operating times can be preserved across multiple operating modes and network reconfigurations. In addition, a dual inverse-setting scheme for DOCRs in microgrids was proposed in42, where critical clearing times of synchronous and inverter-based DERs are incorporated into the coordination constraints and GA is used to obtain relay settings on an IEEE 33-bus system, ensuring both relay selectivity and post-fault MG stability. A further study modeled DOCR coordination in distribution systems with synchronous distributed generators as a multi-criteria problem, where a whale-optimization-based scheme jointly tunes relay settings, SDG penetration level, losses, voltage profile, cost, and fault current limiters on IEEE 30- and 34-bus networks, leading to improved protection indices and higher allowable DG penetration43.
Despite these advances, a research gap remains: many reports still rely on classical GA, PSO, and DE. GA offers strong global exploration but can converge slowly and suffer premature stagnation; PSO is simple and relatively fast yet parameter-sensitive and prone to difficulties in highly nonconvex spaces; DE exhibits solid exploration but limited exploitation, which can hinder fine-tuning of relay settings. Hybrid variants (e.g., PSO–SA, GA–SQP, and Firefly–GA) improve robustness and speed but largely represent incremental refinements rather than fundamentally new paradigms.
Recent literature indicates an evolution toward hybrid, fractional-order, chaotic, and physics-inspired designs. Fractional Order Derivative Moth–Flame Optimization (FODMFO) integrated fractional calculus into the MFO framework and achieved markedly shorter relay operating times in DOCR coordination44. Fractional WOA with SVR (FWOA-SVR) improved the exploration–exploitation balance for solar-energy forecasting45, while Chaos-Infused GWO (CI-GWO) enhanced global search for hybrid thermal–wind systems46. A fractional computing–based hybrid mitigated wind-power uncertainty and strengthened integrated control performance47. The Fractional-Order Swarming Optimizer (FSO) combined economic dispatch with blockchain-enabled smart contracts for autonomous, secure energy-management optimization48. A Modified MFO (MMFO) reduced generation cost under emission and wind constraints49, and a Fractional Hybrid Whale Optimizer (FHWO) further improved thermal–wind integration50. Comparative studies on fractional-order controllers optimized via modern metaheuristics corroborate gains in convergence stability and robustness51.
Notwithstanding this progress, emerging optimizers such as AVOA, ARO, NOA, ZOA, and TSO have not yet been systematically benchmarked for DOCR coordination. These methods span diverse mechanisms vulture foraging (AVOA), adaptive rabbit motion (ARO), zebra grouping and diversity (ZOA), Newtonian, physics-driven exploitation (NOA), and adaptive phase transition between exploration and exploitation (TSO)–and collectively capture the main evolutionary directions in contemporary metaheuristics. By evaluating these five algorithms under identical objectives and CTI constraints on IEEE benchmark systems, this study aims to provide a coherent, head-to-head assessment of their practical suitability for DOCR and to identify algorithm–system size pairings that minimize operating time without compromising CTI-based selectivity.
Material and methods
Coordination of DOCR
The DOCR coordination analyses in this study were performed in accordance with IEEE Std C37.112 (time–current relay characteristics), IEEE Std C37.230 (application of protection relays in distribution systems), and IEC 60255-151 (measuring relays and protection equipment). The inverse time–current characteristic families–standard inverse (SI), very inverse (VI), extremely inverse (EI), and definite time (DT)–were formulated from the mathematical models defined in these standards and integrated into the analysis workflow. In this work, the standard inverse characteristic was adopted to model relay behavior. Coordination strategies tailored to the dynamic nature of distribution systems were then developed, and the relay settings (Time Dial/Multiplier Setting, TDS/TMS, and Pickup Setting, PS) were optimized with respect to these current–time characteristics.
The effectiveness of protection relays fundamentally depends on accurately detecting fault-driven current magnitudes and issuing trips with appropriate timing. Short-circuit events produce currents far above nominal levels; overcurrent relays sense these elevated values and command associated circuit breakers to isolate the faulted section, thereby limiting equipment damage and maintaining supply to unfaulted loads. The mapping between operating time and measured current (i.e., the current–time characteristic) enables operation in inverse-time or definite-time modes. In practice, inverse-time characteristics are generally preferred for phase-to-phase faults, while definite-time operation is often applied to L–G contingencies. In inverse-time mode, higher fault currents yield shorter operating times, allowing severe faults to be cleared more rapidly. The coefficients used in the typical inverse-time and definite-time curves specified by IEC 60255 are listed in Table 152.
Figure 1 illustrates the fundamental coordination principle of overcurrent relays in a radial distribution network. In such systems, relays installed along the feeder typically sense fault currents of comparable magnitude during a fault event a condition that directly influences the selectivity of the protection scheme. To ensure selective operation, the relay nearest to the fault (R1) must trip its associated circuit breaker without intentional delay, while upstream relays (closer to the source) are configured with intentional, progressively increasing time delays. This sequential, time-graded behavior is referred to as relay coordination.
Within this framework, relays are set using inverse time–current characteristics. Relay R1 is adjusted to operate in the shortest time, whereas upstream devices (e.g., R2 and R3) are assigned longer operating times in a graded manner. If R1 fails to trip for any reason, R2 and, if necessary, R3 acts as backup to isolate the fault and preserve system integrity. This hierarchical arrangement is widely applied in power systems to enhance both selectivity and operational reliability.

Relay coordination in a radial distribution network.
Relay coordination especially in distribution networks with many protection devices requires each relay to be tuned for both speed and selectivity. An effective DOCR coordination scheme is expected to satisfy the following technical requirements53:
-
Selectivity: Isolate only the faulted zone without interrupting adjacent feeders, thereby preserving supply continuity. Operating times should increase monotonically from the relay nearest to the fault toward the source.
-
Speed: Detect and clear faults rapidly to limit the exposure of healthy components to fault currents and reduce the risk of cascading failures.
-
Reliability: Operate accurately and as intended, avoiding false trips and ensuring dependable fault clearing.
-
Simplicity: Achieve protection objectives with the minimum necessary number of relays and auxiliaries to keep the scheme clear, maintainable, and practical.
-
Economy: Minimize installation and maintenance costs by avoiding unnecessary hardware while meeting performance targets.
-
Backup protection: Provide coordinated backup such that, if the primary relay fails, an upstream relay protecting the same zone trips after the prescribed delay to maintain continuity and security.
Proposed design framework and applied metaheuristic algorithms
To address the DOCR coordination problem effectively, a comprehensive optimization framework was developed. Three standard test systems IEEE 3-, 8-, and 15-bus were selected to evaluate the proposed approach. The methodology consists of four main stages: system modeling, coordination model formulation, optimization, and result analysis. Five recent metaheuristic algorithms (AVOA54, ARO55, ZOA56, NOA57, and TSO58) were employed to optimize relay settings based on various network topologies. The overall workflow of the proposed framework, along with the individual flowcharts of the five algorithms, is presented in Figure 2.

Comprehensive workflow for DOCR coordination and optimization in power systems with flowcharts of the five metaheuristic algorithms.
African vultures optimization algorithm
AVOA is a novel metaheuristic optimization method inspired by the survival strategies and social dynamics of African vultures. This algorithm models the exploration and exploitation phases based on natural behaviors such as foraging, competition, and adaptation to environmental conditions. AVOA is particularly designed to solve nonlinear, high-dimensional, and constrained optimization problems. It relies on two behavioral types of vultures: hungry vultures, which explore a broader area of the solution space to enhance global search, and satiated vultures, which conduct intensive local searches in promising regions to support exploitation. The optimization process starts with a randomly generated population of individuals, each representing a potential solution. These individuals evolve over time through mechanisms including leader selection, energy level updates, convergence/divergence strategies, and performance evaluation. Through dynamic behavioral adjustments, the population collectively aims to converge toward the global optimum. AVOA balances global exploration and local exploitation via an energy-driven adaptive mechanism, leader-guided search dynamics, and a parallel search conducted by both hungry and satiated individuals, enabling fast convergence without sacrificing diversity. The step-by-step procedure is summarized in Algorithm 1, while the derivations of the update rules and additional implementation details underlying the pseudocode can be found in the cited work54.
Recent studies have shown that AVOA demonstrates fast convergence and a strong capability to escape local minima, making it a robust and reliable approach for complex engineering optimization problems.

Pseudocode of AVOA
Artificial rabbits optimization
ARO algorithm is a recently developed metaheuristic optimization technique inspired by the natural survival strategies of rabbits, particularly their escape behavior and shelter usage. Designed to address complex, high dimensional, and constrained search problems, ARO aims to establish a balance between global exploration and local exploitation. The algorithm is fundamentally based on two behavioral models: the Exploitation Phase (Random Hiding Strategy), where rabbits seek random hiding spots when threatened simulating intensive local searches in promising areas near current best solutions; and the Exploration Phase (Detour Foraging Strategy), where rabbits forage through indirect paths allowing the algorithm to explore broader regions of the search space and discover new potential solutions. By adaptively alternating between these phases, ARO balances exploration and exploitation, avoiding entrapment in local optima while maintaining steady convergence toward the global optimum. The step by step procedure is summarized in Algorithm 2, and its behavior-driven guidance, real-time phase switching, and mathematically grounded update rules jointly enhance solution quality. The derivations of the governing equations (e.g., detour foraging, random hiding, and the acceptance rule) and further implementation details underlying the pseudocode can be found in the original source55.
Recent studies have demonstrated that ARO delivers competitive performance in solving nonlinear, complex, and multi-objective optimization problems, with superior convergence speed compared to conventional algorithms. These characteristics make ARO a promising optimization tool for challenging engineering applications such as the coordination of DOCR in power systems.

Pseudocode of ARO
Zebra optimization algorithm
ZOA is a metaheuristic optimization technique inspired by the natural behaviors of zebra herds, particularly their migration, navigation, and survival strategies. This algorithm simulates the zebras’ ability to move collectively while avoiding predators, effectively modeling a balance between exploration and exploitation within the solution space. In ZOA, each zebra represents a potential solution, and their positions are dynamically updated based on their distance and orientation relative to the global best solution. The algorithm enables broad search through random movements while intensifying the search around promising regions, thus enhancing local refinement. Adaptive parameter tuning and mathematically modeled movement strategies allow ZOA to avoid premature convergence and accelerate the search process. It demonstrates high efficiency in solving complex, high-dimensional, and nonlinear optimization problems. Owing to its robustness, ZOA shows strong potential for challenging engineering tasks such as DOCR coordination. The step-by-step procedure is summarized in Algorithm 3, while the underlying update rules for foraging and defense phases (and implementation details such as boundary handling and best-solution updates) are provided in the original source56.
Due to its robustness, ZOA can be successfully applied to complex engineering problems such as the coordination of DOCR in power systems. Its sustainability, adaptability, and high search efficiency make ZOA a competitive and effective alternative to traditional optimization methods.

Pseudocode of ZOA
Nutcracker optimization algorithm
NOA is a novel metaheuristic technique inspired by the nut-cracking behavior of squirrels. The algorithm mimics how squirrels apply mechanical pressure, adjust position, and use environmental cues to crack nuts translating these behaviors into effective exploration and exploitation mechanisms within complex optimization landscapes. NOA operates through three core strategies: (1) the Cracking Strength Strategy, which emulates the pressure exerted during nut cracking to represent the fitness-based pressure on candidate solutions; (2) the Position Adjustment Strategy, inspired by the squirrel’s fine-tuned positioning of the nut, which enhances local search precision; and (3) Neighborhood Interaction, where individuals share information to adapt based on surrounding conditions, improving diversity and preventing premature convergence. NOA combines a foraging storage strategy with cache search and recovery, using an iteration-dependent schedule to alternate between broad exploration and targeted exploitation. This design enables effective search in high dimensional, nonlinear landscapes with many local minima, while preserving population diversity and refining promising regions. The step by step procedure is summarized in Algorithm 4, and the governing equations (e.g., reference-point generation, exploration/recovery moves, and the greedy acceptance rule) together with additional implementation details are provided in the original source57.
Empirical studies have shown that NOA achieves competitive results in terms of solution quality, convergence speed, and reliability, making it a promising optimization tool for complex engineering problems such as DOCR coordination in power systems.

Pseudocode of NOA
Transit search optimization
TSO is a recently introduced population-based metaheuristic algorithm inspired by the astrophysical transit method employed for detecting exoplanets. This method involves monitoring periodic dips in a star’s brightness caused by a planet passing in front of it, and TSO cleverly translates this concept into a computational model to tackle complex, nonlinear, and constraint heavy optimization problems. The algorithm comprises five main phases: galaxy, transit, planet, neighbor, and exploitation. In the galaxy phase, candidate galaxy centers and high-potential optimization regions (habitable zones) are identified using probabilistic and deterministic methods. The transit phase emulates virtual telescope observations to detect “brightness drops,” indicating promising solutions. If no significant transit is observed, the algorithm intensifies search around the current best solution. The planet phase focuses on refining the detected solution by assessing its spatial characteristics, while the neighbor phase explores adjacent regions to identify superior candidates. Finally, the exploitation phase fine-tunes promising solutions based on quality metrics such as stability and proximity to the global optimum. By balancing global exploration through astronomical analogies with local exploitation strategies, TSO demonstrates accelerated convergence and reduced risk of premature stagnation, as summarized step by step in Algorithm 5 The derivations of the governing equations and additional implementation details underlying the pseudocode can be found in the cited works58,59.
Its robustness and adaptability have been proven effective in optimizing DOCR coordination, where parameters such as selectivity, response speed, and relay reliability are crucial in multi-zoned and highly dynamic distribution networks60.

Pseudocode of TSO
Definition of the optimization problem
DOCR coordination is posed as an optimization problem that seeks optimal TMS and PS values such that selectivity and speed requirements are satisfied. The primary objective is to minimize the operating times of the primary relays while avoiding miscoordination. The objective function (OF), given in Equation (1), follows the general formulation widely adopted for DOCR coordination in the literature4,17,61,62.
This equation aims to minimize the total operating time (\(t_{\text {op},i}\)) of all \(n\) relays in the system. The CTI constraint is defined by Equation (2):
Here, \(t_{\text {op},i}\) denotes the operating time of the primary relay, while \(t_{\text {ob},j}\) denotes the operating time of the backup relay. The condition in (2) ensures that the backup relay operates with a sufficient intentional delay (CTI) relative to the primary relay, thereby guaranteeing proper selectivity in the protection system. The boundaries of the TMS for each relay \(i\) are defined by Equation (3) as:
Here, \(\text {TMS}_{i,\min }\) and \(\text {TMS}_{i,\max }\) denote the minimum and maximum allowable time-multiplier settings for relay \(i\), respectively. The calculation of the maximum overload current is defined by Equation (4):
When determining the relay pickup value, the maximum current under system overload conditions is taken into account. Here, \(\text {OLF}\) denotes the overload factor (typically ranging from 1.25 to 1.5), and \(I^{\max }_L\) represents the maximum permissible line current under normal loading conditions.
The upper limit of the pickup setting (PS) for each relay \(i\) is defined by Equation (5) as:
Here, \(I_{f}^{\min }\) denotes the minimum fault current in the system.
The PS value is constrained to not exceed approximately 66% of the minimum fault current in the system. This ensures that the relay is capable of detecting low-magnitude faults as well. The boundaries of the pickup setting (PS) for each relay \(i\) are defined by Equation (6) as:
Here, \(\text {PS}_{i,\min }\) and \(\text {PS}_{i,\max }\) denote the minimum and maximum allowable pickup settings for relay \(i\), determined by the system’s overload constraints (lower limit) and the requirement to detect low-magnitude faults (upper limit). The relay operating time limits are defined by Equation (7):
Each relay’s operating time is constrained between its minimum \(t_{i,\min }\) and maximum \(t_{i,\max }\) limits, which are determined by physical constraints and protection strategy requirements. Relays that trip too quickly or too slowly can jeopardize system safety. The Time-Current Characteristic Equation (IEC/IEEE) is defined by Equation (8):
This equation calculates the operating time of relay \(i\) with an inverse-time characteristic. Here, \(A\) and \(B\) represent the curve-type constants (e.g., for standard inverse, very inverse, or extremely inverse characteristics), \(\text {TMS}_i\) is the time multiplier setting, \(I_{f,i}\) denotes the fault current seen by relay \(i\), and \(\text {PS}_i\) is its pickup setting. This formulation forms the basis of the DOCR coordination problem, and all optimization algorithms considered in this study are built upon this model.
Protection and simulation settings for the 3-, 8-, and 15-bus test systems
Global protection settings and simulation parameters for the 3-, 8-, and 15-bus test systems are summarized below to facilitate reproducibility and are presented in Table 2
Results and discussion
This section first outlines the computational workflow of the study and then details the simulation and optimization settings. A short no-fault run was executed to obtain baseline (pre-fault) pickup currents at each relay, \(I_{p0}\). Three-phase short circuits were subsequently injected at representative locations on every protected line (sending end, mid-line, remote end). For each scenario, the TMS and the pickup setting were optimized jointly, with the latter realized as an additive offset \(\Delta I_p\) applied to \(I_{p0}\) (i.e., \(I_p = I_{p0} + \Delta I_p\)). The search was subject to selectivity and timing constraints derived from the chosen inverse-time characteristic. Results were finally aggregated across the IEEE 3-, 8-, and 15-bus systems and across all metaheuristics considered (AVOA, ARO, ZOA, NOA, TSO).
In the simulations, line parameters were converted to per-kilometer resistance, inductance (via reactance), and capacitance (via shunt admittance). A balanced load flow was solved using the Newton–Raphson method to obtain the pre-fault operating point (bus voltages/angles and branch currents). From this operating point, only three-phase faults were applied, with fault impedance neglected to capture the largest current levels. Although uncommon in practice, the three-phase fault produces the highest short-circuit currents and thus constitutes a rigorous stress test; using this worst case consistently enables fair comparisons across networks and algorithms. In the time domain, CT secondary currents were recorded at each relay, and operating times were computed from the selected inverse-time curve given candidate \(\{ \text {TMS}, \Delta I_p \}\).
Two decision variables were optimized per relay: TMS and the additive pickup offset \(\Delta I_p\) (A), defining \(I_p = I_{p0} + \Delta I_p\). Box constraints were imposed as \(\text {TMS}\in [0.05,\,1.50]\) and \(\Delta I_p\in [-500,\,500]~\textrm{A}\). Before fitness evaluation, an interior repair operator re-sampled any out-of-range component uniformly within its admissible interval; if \(I_p\) became negative after applying \(\Delta I_p\), it was clamped to the minimum pre-fault current observed in the system. Trip times were computed from the IEC standard inverse curve on each phase, and the minimum across phases was taken as the relay response. To avoid pathological values, response times outside \([0.01,\,3.00]~\textrm{s}\) were replaced by a uniformly re-sampled value within this window. Primary–backup selectivity was enforced as a hard feasibility condition with \(\textrm{CTI}\ge 0.01~\textrm{s}\); candidates violating CTI were rejected and re-sampled (rejection–resampling) rather than penalized. The optimization objective minimized the sum of primary-relay operating times per scenario; unless otherwise noted, the reported per-relay pickup corresponds to the phase-maximum after applying \(\Delta I_p\). All scenarios used identical initial settings (population size, maximum iterations, and algorithm-specific controls) with fixed random seeds for reproducibility. Simulations were performed on a workstation with an Intel® Core™ i7-6700 CPU, 24 GB RAM, and Windows 11 Pro (64-bit).
IEEE test systems
Three IEEE distribution test systems of increasing size and structural complexity are used to evaluate the accuracy and scalability of DOCR coordination strategies. These systems, widely adopted in the literature5,24,63, serve as standard benchmarks that enable consistent comparison of DOCR algorithms across different network scales and topologies.
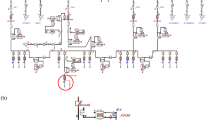
The IEEE 3-bus system, with its compact topology, is employed as a didactic platform for baseline validation of DOCR coordination; its simplicity facilitates clear assessment of selectivity, CTI enforcement, and parameter-sensitivity effects. The single-line diagram of the 3-bus network is shown in Figure 3.

Single-line diagram of the IEEE 3-bus system.
The IEEE 8-bus system, exhibiting moderate complexity and widely used in protection-coordination studies of meshed distribution networks, is depicted in Figure 4. This benchmark enables assessment of scalability, multi-backup interactions, and bidirectional fault-current effects characteristic of meshed topologies.

Single-line diagram of the IEEE 8-bus system.
To examine large-scale scenarios with many protection zones and relay pairs, the IEEE 15-bus system is included in the benchmark set. Owing to its richer interconnections and greater depth/branching, this network is used to stress-test the optimization algorithms under extensive and realistic operating conditions tight CTI constraints, heterogeneous fault levels, and increased primary–backup interactions. The single-line diagram of the 15-bus system is shown in Figure 5.

Single-line diagram of the IEEE 15-bus system.
Results of test systems
In this section, the results obtained from the protection coordination studies carried out on the IEEE 3-, 8-, and 15-bus distribution systems, which were described in detail in the previous parts of the paper, are presented and discussed. In the performance evaluation, the total primary relay operating time, which reflects the reliability of the system in terms of selectivity and speed, is used as the objective function. For each test system, the comparative performance of the algorithms, their convergence behavior, and their statistical distributions (box plots) are given in the corresponding figures, while the optimized TMS and PS values, which enable parametric-level analysis, are reported in the corresponding tables.
The IEEE 3-bus test system results are evaluated by comparing the objective function values obtained by the five metaheuristic algorithms. Figure 6 compares these objective function values and shows that ARO achieves the best performance with the lowest value of 0.23 s, while the other algorithms follow as NOA (0.29 s), TSO (0.30 s), AVOA (0.32 s), and ZOA (0.34 s), respectively. The convergence curves in Figure 7 support this ranking by revealing that, in particular, ARO and NOA reach these low levels in fewer iterations and then settle into a stable plateau region. The box plots in Figure 8 indicate that, for the leading algorithms especially ARO and NOA the solutions exhibit relatively narrow spreads and a limited number of outliers, demonstrating that the results are stable and repeatable. Finally, the optimized TMS–PS pairs reported in Table 3 summarize the parameter sets obtained for each algorithm and quantitatively show how these choices are reflected in the objective function performance.

Comparison of total relay operating times for five algorithms in the IEEE 3-bus system.

Convergence characteristics of five algorithms on the IEEE 3-bus test system.

Box plot of five algorithms for the IEEE 3-bus test system.
The IEEE 8-bus test system results are similarly analyzed by comparing the objective function values of the five metaheuristic algorithms. Figure 9 compares the obtained objective function values and shows that ARO provides the best performance by achieving the lowest total relay operating time of 2.86 s, while the other algorithms reach 3.80 s (TSO), 3.84 s (AVOA), 4.61 s (ZOA), and 5.31 s (NOA), respectively. The convergence curves in Figure 10 demonstrate that ARO and TSO, in particular, reach these low levels in fewer iterations and then settle into a stable plateau region, thereby supporting this ranking. The box plots in Figure 11 show that, especially for ARO and TSO, the solutions in the medium-sized system exhibit relatively narrow spreads and a limited number of outliers, indicating that the results are stable and repeatable. Finally, the optimized TMS–PS pairs given in Table 4 summarize the parameter sets determined for each algorithm and quantitatively support how these choices are reflected in the objective function performance.

Comparison of total relay operating times for five algorithms on the IEEE 8-bus system.

Convergence characteristics of five algorithms on the IEEE 8-bus test system.

Box plot of five algorithms for the IEEE 8-bus test system.
The IEEE 15-bus test system results are likewise analyzed by comparing the algorithms based on their objective function values. Figure 12 presents the total relay operating times obtained for the five metaheuristic methods and shows that NOA achieves the lowest value of 5.25 s, thus emerging as the best-performing algorithm, while the other algorithms follow as ZOA (5.90 s), TSO (6.01 s), AVOA (6.51 s), and ARO (6.97 s), respectively. The convergence curves in Figure 13 indicate that NOA and ZOA, in particular, reach lower objective function levels with fewer iterations in the high-dimensional search space and then proceed in a stable regime, which supports this ranking. The box plots in Figure 14 show that, for NOA and ZOA, the solutions in the large-scale system exhibit relatively narrow spreads and a limited number of outliers, demonstrating that the results are statistically reliable and repeatable. Finally, the optimized TMS–PS pairs reported in Table 5 reveal how each algorithm adapts to the increasing complexity of the 15-bus network and quantitatively illustrate the impact of the selected parameter sets on the total operating time.

Comparison of total relay operating times for five algorithms on the IEEE 15-bus system.

Convergence characteristics of five algorithms on the IEEE 15-bus test system.

Box plot of five algorithms for the IEEE 15-bus test system.
When the three test systems are considered together, it is observed that the metaheuristic algorithms exhibit a consistent yet topology dependent performance across distribution networks of different scales and complexity levels. In the small-scale and relatively simple IEEE 3-bus system, ARO delivers the best result with the lowest objective function value, and it maintains this superiority in the medium-scale 8-bus system as well. In contrast, NOA becomes the best-performing algorithm in the 15-bus system, where the number of lines, protection zones, and the dimensionality of the search space increase significantly. This shift indicates that the performance ranking of the algorithms is not determined solely by their mathematical formulation, but is also strongly influenced by network size, structural complexity, and the nature of the imposed constraints. From this perspective, it can be stated that while ARO provides fast and effective solutions for small and medium-scale problems, NOA achieves a more favorable balance in larger and more complex systems.
When the convergence curves and box plots are evaluated together, it is seen that the algorithms achieving the best objective function values also exhibit a strong profile in terms of stability and repeatability. Convergence behaviour characterized by reaching low objective function levels in fewer iterations and then settling into a stable plateau region is particularly advantageous in practical applications where the number of iterations and computation time are constrained. The box plots further show that leading algorithms such as ARO, NOA, and, in some cases, TSO produce narrow spreads and a limited number of outliers, demonstrating that, despite the stochastic nature of the optimization process, the solutions are statistically reliable and practically applicable from an engineering standpoint. The few outliers observed in the box-plot distributions mainly correspond to runs in which the population either converges prematurely or becomes temporarily trapped in shallow local optima, typically due to unfavourable random initialization or a momentary imbalance between exploration and exploitation in the early iterations. These cases lead to slightly longer total relay operating times than the median behaviour, but their frequency and magnitude are limited and do not alter the overall ranking of the algorithms or violate the imposed CTI and time-window constraints. Rather, they reflect the intrinsic randomness of metaheuristic search and motivate the use of multi-run statistical evaluation, which has been adopted in this study to ensure robust engineering conclusions. This suggests that the proposed approaches can be confidently employed in real networks, especially in scenarios involving multiple operating conditions or frequent re-coordination requirements.
The distribution of the optimized TMS–PS pairs across the three systems shows that the total operating time can be significantly reduced while preserving the selectivity constraints (CTI). Lowering TMS values to accelerate primary relay operation, combined with a careful adjustment of PS values and coordination intervals, reveals that both speed and selectivity requirements can be satisfied simultaneously. In this context, the metaheuristic algorithms do not merely produce “smaller objective function values,” but also reshape, at the parameter level, the selectivity–speed trade-off that underpins protection philosophy, thereby offering more flexible and scalable solutions compared to classical methods. The findings indicate that, particularly in modern distribution networks where DG penetration and topological uncertainties are increasing, metaheuristic-based protection coordination approaches can be regarded as a strong and viable alternative.
Comparison of algorithms with studies in literature
The parameter comparison results of the algorithms applied to the IEEE test systems are summarized in Table 6 for the IEEE 3-bus system, Table 7 for the IEEE 8-bus system, and Table 8 for the IEEE 15-bus system. These tables report both the objective function values and the percentage improvements achieved by the proposed metaheuristics. Complementary graphical comparisons of the objective function values for different algorithms are presented in Figure 15 for the IEEE 3-bus system, Figure 16 for the IEEE 8-bus system, and Figure 17 for the IEEE 15-bus system.

Graphical comparison of OF values for different algorithms in the IEEE 3-bus system.

Graphical comparison of OF values for different algorithms in the IEEE 8-bus system.

Graphical comparison of OF values for different algorithms in the IEEE 15-bus system.
Conclusion
This study presents a comparative analysis of five contemporary metaheuristic algorithms (ZOA, AVOA, TSO, NOA, ARO) for DOCR coordination on the IEEE 3-, 8-, and 15-bus test systems under IEC/IEEE inverse time–current characteristics and strict selectivity constraints, within a unified and reproducible framework. Across all scenarios, jointly optimizing the TMS–PS pairs preserved selectivity while enabling substantial reductions in total operating (clearing) times. The key quantitative findings indicate that, on the 3-bus system, ARO achieved the lowest total operating time of 0.23 s (NOA 0.29 s, TSO 0.30 s, AVOA 0.32 s, ZOA 0.34 s), and on the 8-bus system ARO again ranked first with 2.86 s (TSO 3.80 s, AVOA 3.84 s, ZOA 4.61 s, NOA 5.31 s). On the 15-bus system, NOA prevailed with 5.25 s, followed by ZOA 5.90 s, TSO 6.01 s, AVOA 6.51 s, and ARO 6.97 s. Comparisons with the literature corroborate the magnitude of these gains: on the 3-bus system, ARO delivered a 96.70% improvement over TLBO(MOF) (6.972 s) and 85.13% over the closest literature value, QIAWOA (1.547 s); on the 8-bus system, ARO improved by 74.15% over LM (11.065 s) and 62.97% over QIAWOA (7.723 s); and on the 15-bus system, NOA improved by 79.66% over MTLBO (25.815 s) and 60.22% over QIAWOA (13.198 s). Taken together, these results reveal topology- and scale-sensitivity: ARO stands out on small–medium networks, NOA leads on large networks, and TSO offers a balanced/consistent choice irrespective of network size. Overall, advanced algorithms provide reliable optimization for DOCR coordination and establish a solid basis for intelligent, flexible, and sustainable protection strategies; their robustness to variations in loading level, fault direction, and short-circuit levels points to high applicability, particularly in renewable-integrated distribution grids and smart-grid infrastructures.
Despite these promising results, several limitations of the present study should be acknowledged. First, only three-phase (L–L–L) short-circuit faults were considered, representing the worst-case condition; more frequent L–G, L–L, and L–L–G faults and high-impedance contingencies were not explicitly analysed. Second, relay settings were obtained for a single steady-state operating point without modelling long-term variations in loading patterns, DG output uncertainty, or network reconfiguration. Third, the metaheuristic parameters (population size, iteration limit, control coefficients) were kept fixed across all algorithms to ensure a fair comparison rather than tuned individually for each method, which may under-represent the best attainable performance of some algorithms. Finally, all results are based on offline MATLAB/Simulink studies on benchmark IEEE networks; hardware-in-the-loop and real-network tests with numerical relays are still required to confirm implementation aspects such as communication delays, measurement noise, and practical setting deployment.
Future work will focus on broadening the scope and field validity of the method. Performance on larger and more complex grid topologies (meshed/reconfigurable feeders, multiple DG and EV penetration) will be systematically examined under L–G, L–L, L–L–G and high-impedance faults, variable fault impedance, and stochastic load–generation fluctuations. Hybrid portfolios that combine the complementary strengths of the algorithms together with parameter-adaptive/restart strategies will be evaluated in terms of convergence speed, solution quality, and stability. Beyond time minimization alone, multiobjective formulations that consider miscoordination risk, CTI margin–violation frequency, and setting smoothness will be explored. Finally, practical applicability will be validated on real-time platforms (HIL: Hardware-in-the-Loop; RTDS: Real-Time Digital Simulator), enabling safe and reproducible transfer of the findings to operational environments and accelerating the transition to advanced protection solutions.
Data availability
All data and MATLAB/Simulink code generated and analysed during the current study are available from the corresponding author upon reasonable request.
Abbreviations
- DOCR:
-
Directional Overcurrent Relay
- OCR:
-
Overcurrent Relay
- DG:
-
Distributed Generation
- PS:
-
Pickup Setting (relay current threshold)
- TDS:
-
Time Dial Setting (relay time multiplier)
- TMS:
-
Time Multiplier Setting (equivalent to TDS)
- CTI:
-
Coordination Time Interval
- OF:
-
Objective Function
- s:
-
Second
- pu:
-
Per-Unit
- AVOA:
-
African Vultures Optimization Algorithm
- ARO:
-
Artificial Rabbits Optimization
- ZOA:
-
Zebra Optimization Algorithm
- NOA:
-
Nutcracker Optimization Algorithm
- TSO:
-
Transit Search Optimization
- GA:
-
Genetic Algorithm
- PSO:
-
Particle Swarm Optimization
- DE:
-
Differential Evolution
- WOA:
-
Whale Optimization Algorithm
- MFO:
-
Moth Flame Optimization
- TLBO:
-
Teaching Learning Based Optimization
- BBO:
-
Biogeography Based Optimization
- QIAWOA:
-
Quantum-Inspired Adaptive Walrus Optimization Algorithm
- MAPSO:
-
Modified Adaptive Particle Swarm Optimization
- FPSOGSA–EM:
-
Fractional PSO Gravitational Search Algorithm Entropy Metric
- dFDB:
-
Dynamic Fitness Distance Balance
References
Dey, I., & Kumar Roy, P.: Dynamic arithmetic optimization algorithm under load uncertainty for wind-solar-energy storage-based hybrid radial network. Optimal Control Applications and Methods (2025).
Dey, I. & Roy, P. K. Renewable dg allocation in radial distribution networks for techno-economic analysis using chaotic quasi oppositional arithmetic optimization algorithm. Measurement 249, 117012 (2025).
Sarwagya, K., Nayak, P. K. & Ranjan, S. Optimal coordination of directional overcurrent relays in complex distribution networks using sine cosine algorithm. Electric Power Systems Research 187, 106435 (2020).
Al-Bhadely, F. & İnan, A. Improving directional overcurrent relay coordination in distribution networks for optimal operation using hybrid genetic algorithm with sequential quadratic programming. Energies 16(20), 7031 (2023).
Khan, B. M., Wadood, A., Park, H., Khan, S. & Ali, H. Optimal coordination of directional overcurrent relays using an innovative fractional-order derivative war algorithm. Fractal and Fractional 9(3), 169 (2025).
Gupta, S. & Deep, K. Optimal coordination of overcurrent relays using improved leadership-based grey wolf optimizer. Arabian Journal for Science and Engineering 45(3), 2081–2091 (2020).
Dey, I. & Roy, P. K. Simultaneous network reconfiguration and dg allocation in radial distribution networks using arithmetic optimization algorithm. International journal of numerical modelling: Electronic networks, devices and fields 36(6), 3105 (2023).
Dey, I. & Roy, P. K. Oppositional arithmetic optimization algorithm for network reconfiguration and simultaneous placement of dg and capacitor in radial distribution networks. International Journal of Numerical Modelling: Electronic Networks, Devices and Fields 37(5), 3298 (2024).
Mukherjee, D., Mallick, S. & Rajan, A. A levy flight motivated meta-heuristic approach for enhancing maximum loadability limit in practical power system. Applied Soft Computing 114, 108146 (2022).
Mukherjee, D. & Mallick, S. Utilization of adaptive swarm intelligent metaheuristic in designing an efficient photovoltaic interfaced static synchronous series compensator. Engineering Applications of Artificial Intelligence 123, 106346 (2023).
Mukherjee, D. & Mallick, S. Efficient operation of photovoltaic-interfaced reduced switch 11-level inverter using adaptive swarm-based metaheuristic. Electrical Engineering 106(1), 521–551 (2024).
Mukherjee, D. & Mallick, S. A swarm intelligent metaheuristic approach for efficient series compensation resulting in system loadability enhancement. Arabian Journal for Science and Engineering 50(8), 5795–5823 (2025).
Al Mtawa, Y., Haque, A. & Halabi, T. A review and taxonomy on fault analysis in transmission power systems. Computation 10(9), 144 (2022).
Almobasher, L.R. & Habiballah, I.: Review of power system faults. International Journal of Engineering Research & Technology (IJERT). (2020).
Sampaio, F. C. et al. Adaptive fuzzy directional bat algorithm for the optimal coordination of protection systems based on directional overcurrent relays. Electric power systems research 211, 108619 (2022).
Irfan, M. et al. An optimized adaptive protection scheme for numerical and directional overcurrent relay coordination using harris hawk optimization. Energies 14(18), 5603 (2021).
Azari, M., Mazlumi, K. & Ojaghi, M. Optimal directional overcurrent relay coordination in interconnected networks considering user-defined pwl characteristic curve. Arabian Journal for Science and Engineering 47(3), 3119–3139 (2022).
Shrivastava, A., Sharma, A., Pandit, M., Jately, V. & Azzopardi, B. Hybrid protection scheme based optimal overcurrent relay coordination strategy for re integrated power distribution grid. Energies 14(21), 7192 (2021).
Wang, Y., Habib, K., Wadood, A. & Khan, S. The hybridization of pso for the optimal coordination of directional overcurrent protection relays of the ieee bus system. Energies 16(9), 3726 (2023).
Langazane, S. N. & Saha, A. K. Effects of particle swarm optimization and genetic algorithm control parameters on overcurrent relay selectivity and speed. IEEE Access 10, 4550–4567 (2022).
Elsadd, M.A., Zobaa, A.F., Khattab, H.A., Abd El Aziz & A.M., Fetouh, T.: Communicationless overcurrent relays coordination for active distribution network considering fault repairing periods. Energies 16(23), 7862 (2023).
Adly, A. R., Elsadd, M. A., Elgamasy, M. M., Fadl, O. F. & Tolba, M. A. Directional protection scheme using impedance approach for transmission lines. Scientific Reports 15(1), 20217 (2025).
Alasali, F., et al.: Advanced clustering and optimisation techniques for adaptive protection in ac microgrids with hardware-in-the-loop testing. Energy Science & Engineering (2025).
Wadood, A., Albalawi, H., Alatwi, A.M. & Park, H.: Modified swarm-based artificial intelligence optimization for optimal coordination of directional overcurrent relays in power system. IEEE Access (2025)
Bouchekara, H., Zellagui, M. & Abido, M. A. Optimal coordination of directional overcurrent relays using a modified electromagnetic field optimization algorithm. Applied Soft Computing 54, 267–283 (2017).
Al-Bhadely, F. & İnan, A. Enhancing coordination efficiency with fuzzy monte carlo uncertainty analysis for dual-setting directional overcurrent relays amid distributed generation. Sensors 24(13), 4109 (2024).
Iqbal, A., Muhammad, Y., Awan, S. E., Khan, B. M. & Raja, M. A. Z. Entropy driven integrated fractional particle swarm optimization-gravitational search algorithm optimization expedition for optimal coordination of directional over current relays. Computers and Electrical Engineering 124, 110392 (2025).
Akdag, O. & Yeroglu, C. Optimal directional overcurrent relay coordination using mrfo algorithm: A case study of adaptive protection of the distribution network of the hatay province of turkey. Electric Power Systems Research 192, 106998 (2021).
Khan, B. M. et al. Analysis of war optimization algorithm in a multi-loop power system based on directional overcurrent relays. Energies 17(22), 5542 (2024).
Rath, S. S. et al. Enhanced fault protection coordination in wind-solar distribution grids utilizing improved hyper spherical search based optimization. Scientific Reports 15(1), 34194 (2025).
Gairola, E., Rawat, M. S., Thakur, P., Gupta, S. & Kumar, M. Comparative study of heuristic algorithms for coordination of industrial over current relays with nonstandard characteristics in microgrid protection. Scientific Reports 15(1), 16020 (2025).
Ayvaz, A. An improved walrus optimizer for optimal coordination of directional overcurrent relays in complex networks. The Journal of Supercomputing 81(15), 1–49 (2025).
Arslanoglu, I. & Altas, I.H.: Optimization and performance comparison of overcurrent relay settings in power systems using genetic algorithm, league championship algorithm, and black hole algorithm. In 2025 Innovations in Intelligent Systems and Applications Conference (ASYU), 1–6 (IEEE, 2025).
Karimkhan-Zand, H., Mazlumi, K., Hashemi-Dezaki, H. & Yousefian, H. A. An optimal procedure for protection coordination of directional overcurrent relay: A novel methodology. Electric Power Systems Research 251, 112235 (2026).
Sultana, S., Paul, S. & Kumar Roy, P.: Study of phasor measurement unit placement in wide area monitoring system of radial distribution network using oppositional-based artificial rabbit optimization. Electrical Engineering, 1–33 (2025).
Ghorai, A., Mandal, B., Roy, P. K. & Paul, C. Oppositional based artificial rabbits optimization applied for optimal allocation of nonlinear dg in distribution networks considering total harmonic distortion limit. Electric Power Systems Research 231, 110334 (2024).
Kahraman, H. T. et al. Dynamic fdb selection method and its application: modeling and optimizing of directional overcurrent relays coordination. Applied Intelligence 52(5), 4873–4908 (2022).
Gholipoor, R. & Damchi, Y. Optimizing dual settings and operating characteristics of docrs, and dgs penetration incorporating pq constraints. Electric Power Systems Research 252, 112420 (2026).
Li, J., Feng, J., Huang, M., Liu, S. & Wang, G. Optimal protection coordination for directional overcurrent relays in radial distribution networks with inverter-based distributed energy resources. International Journal of Electrical Power & Energy Systems 167, 110622 (2025).
Soni, A.K., Mohapatra, A. & Singh, S.N.: Optimal over-current protection coordination in ac microgrid via novel pickup scaling coefficient. IEEE Transactions on Power Delivery (2025)
Rashaei, S. & Yazdaninejadi, A. An improved dynamic model for overcurrent relays in protection of electrical networks: Addressing two-level fault currents. Electric Power Systems Research 246, 111713 (2025).
Eladl, A. A., Sheta, A. N., Elgamal, M., Vasquez, J. C. & Sedhom, B. E. Optimal directional overcurrent relay settings for stable microgrids with synchronous and inverter-based resources. International Journal of Electrical Power & Energy Systems 167, 110639 (2025).
Tanha, M. H., Gandomkar, M. & Nikoukar, J. Optimal protection planning and coordination in microgrids with sdgs, sfcls, and ocr using woa. International Journal of Energy Research 2025(1), 2936717 (2025).
Wadood, A. & Park, H. A novel application of fractional order derivative moth flame optimization algorithm for solving the problem of optimal coordination of directional overcurrent relays. Fractal and Fractional 8(5), 251 (2024).
Wadood, A., Albalawi, H., Alatwi, A. M., Anwar, H. & Ali, T. Design of a novel fractional whale optimization-enhanced support vector regression (fwoa-svr) model for accurate solar energy forecasting. Fractal and Fractional 9(1), 35 (2025).
Wadood, A., Khan, B. S., Khurshaid, T., Kim, K.-C. & Rhee, S. B. Chaos-infused wind power integration in the grey wolf optimal paradigm for combine thermal-wind power plant systems. Frontiers in Energy Research 12, 1301700 (2024).
Albalawi, H. et al. Leveraging the performance of integrated power systems with wind uncertainty using fractional computing-based hybrid method. Fractal and Fractional 8(9), 532 (2024).
Khan, B. S., Qamar, A., Wadood, A., Almuhanna, K. & Al-Shamma, A. A. Integrating economic load dispatch information into the blockchain smart contracts based on the fractional-order swarming optimizer. Frontiers in Energy Research 12, 1350076 (2024).
Albalawi, H., Wadood, A. & Park, H. Economic load dispatch problem analysis based on modified moth flame optimizer (mmfo) considering emission and wind power. Mathematics 12(21), 3326 (2024).
Wadood, A., Sattar Khan, B., Albalawi, H. & Alatwi, A.M.: Design of the novel fractional order hybrid whale optimizer for thermal wind power generation systems with integration of chaos infused wind power. Fractal & Fractional 8(7), (2024).
Özbilgin, F., Mengi, O. Ö., Wadood, A., Güven, A. F. & Park, H. Comparative optimization of pidn and fractional order controllers for a quarter car active suspension system using recent metaheuristic algorithms. Scientific Reports 15(1), 35222 (2025).
Merabet, O., Bouchahdane, M., Belmadani, H., Kheldoun, A. & Eltom, A. Optimal coordination of directional overcurrent relays in complex networks using the elite marine predators algorithm. Electric Power Systems Research 221, 109446 (2023).
Atsever, M.B. & Hocaoğlu, M.H.: Optimal overcurrent relay coordination in distribution networks using path finder algorithm (TESKONGRE, 2024).
Abdollahzadeh, B., Gharehchopogh, F. S. & Mirjalili, S. African vultures optimization algorithm: A new nature-inspired metaheuristic algorithm for global optimization problems. Computers & Industrial Engineering 158, 107408 (2021).
Wang, L., Cao, Q., Zhang, Z., Mirjalili, S. & Zhao, W. Artificial rabbits optimization: A new bio-inspired meta-heuristic algorithm for solving engineering optimization problems. Engineering Applications of Artificial Intelligence 114, 105082 (2022).
Trojovská, E., Dehghani, M. & Trojovskỳ, P. Zebra optimization algorithm: A new bio-inspired optimization algorithm for solving optimization algorithm. Ieee Access 10, 49445–49473 (2022).
Abdel-Basset, M., Mohamed, R., Jameel, M. & Abouhawwash, M. Nutcracker optimizer: A novel nature-inspired metaheuristic algorithm for global optimization and engineering design problems. Knowledge-Based Systems 262, 110248 (2023).
Mirrashid, M. & Naderpour, H. Transit search: An optimization algorithm based on exoplanet exploration. Results in Control and Optimization 7, 100127 (2022).
Amin, M. S. et al. Development of avr controller performance using exponential distribution and transit search optimization techniques. Frontiers in Energy Research 12, 1356978 (2024).
Arslanoglu, I., Nuroglu, F. & Altas, I. H. Comparative performance analysis of transit search optimization and particle swarm optimization for overcurrent relay coordination in radial system. Gazi Journal of Engineering Sciences 11(1), 104–120 (2025).
Al Talaq, M. & Al-Muhaini, M.: Optimal coordination of time delay overcurrent relays for power systems with integrated renewable energy sources. In Power System Protection in Future Smart Grids, 81–107 (Elsevier, 2024).
Al-Bhadely, F. & Inan, A. An innovative approach for enhancing relay coordination in distribution systems through online adaptive strategies utilizing dnn machine learning and a hybrid ga-sqp framework. Arabian Journal for Science and Engineering 49(12), 16865–16887 (2024).
Amraee, T. Coordination of directional overcurrent relays using seeker algorithm. IEEE Transactions on Power Delivery 27(3), 1415–1422 (2012).
Singh, M., Panigrahi, B. & Abhyankar, A. Optimal coordination of directional over-current relays using teaching learning-based optimization (tlbo) algorithm. International Journal of Electrical Power & Energy Systems 50, 33–41 (2013).
Thangaraj, R., Pant, M. & Deep, K. Optimal coordination of over-current relays using modified differential evolution algorithms. Engineering Applications of Artificial Intelligence 23(5), 820–829 (2010).
Foqha, T. et al. Optimal coordination of directional overcurrent relays using hybrid firefly-genetic algorithm. Energies 16(14), 5328 (2023).
Mansour, M. M., Mekhamer, S. F. & El-Kharbawe, N. A modified particle swarm optimizer for the coordination of directional overcurrent relays. IEEE transactions on power delivery 22(3), 1400–1410 (2007).
Albasri, F. A., Alroomi, A. R. & Talaq, J. H. Optimal coordination of directional overcurrent relays using biogeography-based optimization algorithms. IEEE Transactions on Power Delivery 30(4), 1810–1820 (2015).
Ezzeddine, M., Kaczmarek, R. & Iftikhar, M. Coordination of directional overcurrent relays using a novel method to select their settings. IET generation, transmission & distribution 5(7), 743–750 (2011).
Noghabi, A. S., Sadeh, J. & Mashhadi, H. R. Considering different network topologies in optimal overcurrent relay coordination using a hybrid ga. IEEE Transactions on Power Delivery 24(4), 1857–1863 (2009).
Yu, J., Kim, C.-H. & Rhee, S.-B. Oppositional jaya algorithm with distance-adaptive coefficient in solving directional over current relays coordination problem. IEEE Access 7, 150729–150742 (2019).
Kalage, A.A. & Ghawghawe, N.D.: Optimum coordination of directional overcurrent relays using modified adaptive teaching learning based optimization algorithm. Intelligent industrial systems 2(1), 55–71 (2016).
Korashy, A., Kamel, S., Alquthami, T. & Jurado, F. Optimal coordination of standard and non-standard direction overcurrent relays using an improved moth-flame optimization. IEEE access 8, 87378–87392 (2020).
El-Hana Bouchekara, H.R., Zellagui, M. & Abido, M.A.: Coordination of directional overcurret relays using the backtracking search algorithm. Journal of Electrical Systems 12(2), (2016).
Acknowledgments
The authors gratefully acknowledge the support provided by the Dicle University Scientific Research Projects Coordination (DUBAP).
Funding
This study was supported by the Dicle University Scientific Research Projects Coordination (DUBAP) with the project number MÜHENDİSLİK.25.030, and the APC was funded by DUBAP.
Author information
Authors and Affiliations
Contributions
İ.A. designed and developed the study, developed the models and algorithms, performed the simulations, and prepared the main manuscript draft. İ.H.A. provided scientific supervision and critically reviewed the manuscript. H.K. contributed to the modeling of the test system, data preparation, and validation of the simulation results. All authors reviewed and approved the final version of the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Arslanoğlu, İ., Altaş, İ.H. & Kılıç, H. Performance evaluation of advanced metaheuristic algorithms for directional overcurrent relay coordination in distribution networks. Sci Rep 16, 2717 (2026). https://doi.org/10.1038/s41598-025-32416-w
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-32416-w
