
Abstract
This article describes a method for determining the instantaneous geometric working volume of a satellite mechanism that is commonly used as a working mechanism in positive displacement machines (pump and motor). A new mathematical formula for calculating the instantaneous geometric working volume as a function of the angle of rotation of the shaft (rotor) has been proposed. For the satellite mechanism operating as a pump, the mathematical formula for the instantaneous flow rate in this mechanism as a function of the angle of rotation of the rotor (shaft) has been developed. The mathematical formula for the torque indicated in this mechanism (pumping operation) was also developed. Similarly, analyses were carried out for a satellite mechanism operating as a motor. Mathematical formulae were presented to calculate the instantaneous speed of the motor shaft and the instantaneous pressure in the motor’s supply port. To confirm the results of the mathematical analyses, experimental tests were carried out with a prototype satellite machine at a low constant speed. The satellite machine was tested in both pump and motor mode. The results of the tests confirmed that the torque on the shaft is not constant in both pump and motor operation at a constant pressure drop in this machine. This torque depends strictly on the instantaneous working volume of the machine and is therefore a function of the angle of rotation of the shaft. Similarly, at a constant speed, the flow rate (motor absorption) in the machine is also not constant.
Similar content being viewed by others

Introduction
The positive displacement pump and the hydraulic motor (rotary or linear) are the basic and most important components in a hydrostatic drive system. The pump is the source of the fluid flow in the hydraulic system. The hydraulic motor, on the other hand, is the executing element in this system. In recent years, satellite displacement machines, especially satellite motors, have attracted increasing interest from researchers around the world. The first satellite motor was developed and patented by Eng. B. Sieniawski in 19741. It was a motor with a 3 × 4 type satellite mechanism (three-humped rotor and four-humped curvature – Fig. 1)2,3,4,5,6. This motor is still in production7.
The design methodology of this motor is described in8. Nowadays, the next generation of satellite motors, i.e. motors with a 4 × 6 type mechanism (Fig. 1), are also being manufactured9,10,11. The first satellite mechanism of the 4 × 6 type was also developed and put into production by Eng. B. Sieniawski in 198112. Another type of satellite mechanism was the 6 × 8 type, which was also developed and put into production by Eng. B. Sieniawski in 1997 (Fig. 1)13,14. Satellite motors are characterised by a high torque-to-mass ratio of the mechanism and the ability to work with low-viscosity fluids (especially oil-in-water emulsions of the HFA-E type and water). They are therefore widely used to drive a variety of machines and equipment, especially machinery and hand tools in the mining industry.

Satellite mechanisms: type 3 × 4 (left), type 4 × 6 9 (middle) and type 6 × 8 (right): 1—rotor, 2—curvature, 3—satellite15.
New types of satellite mechanisms are still being developed, with a different number of humps on the rotor and the curvature. In publications16,17,18,19, for example, satellite mechanisms of types 1 × 1, 2 × 2, 2 × 3, 2 × 4, and 3 × 3 were presented. However, the design methodology of these mechanisms was briefly characterised in articles18,20,21. The article22 deals in particular with the selection of the shape of the curvature and the rotor of the 2 × 2 type mechanism. The 1 × 1 type mechanism is a specialty. It is a mechanism consisting of an internally toothed gear (curvature), an externally toothed gear (rotor) eccentric to the axis of the curvature, and two small gears (satellites) that interact with the curvature and the rotor17. In the work23 the mechanical losses and thus the mechanical efficiency of the 2 × 4 mechanism were estimated analytically. Satellite mechanisms of the 1 × 1, 2 × 2, 2 × 3, 2 × 4, and 3 × 3 types have not found practical application so far. The mechanisms shown in Fig. 1, i.e. the 3 × 4, 4 × 6, and 6 × 8 type mechanisms have found practical application. In the work5 a method of manufacturing a 3 × 4 mechanism was presented (the WEDM method).
However, the 4 × 6 satellite mechanisms are currently the most popular. Newer and newer designs of these mechanisms are being developed. In publications15,18,24,25,26 methods for designing satellite mechanisms with a sinusoidal rotor outline are presented. However, the article27 presents a method for designing a mechanism in which the rotor and the curvature consist of arcs (non-circular double-arc gear). The construction of the 4 × 6 type mechanism is also described in28.
The 4 × 5 type satellite mechanism is also known, although it is not as popular as the 4 × 6 mechanism. It has been used as a working mechanism in the hydraulic motor29,30 and in the pressure intensifier31.
The 6 × 8 type satellite mechanism can be indicated as a new trend in the development of satellite mechanisms. The first work on a hydraulic motor using this mechanism was published in 200314. The next significant works on this mechanism were published in 202215 and 202432 and mainly concern the methods of its design.
The features of the satellite mechanisms that affect their main operating parameters are also described. Publication33, for example, describes a method for determining the theoretical working volume of satellite mechanisms of different types. But in34 a method for determining the geometrical working volume of these mechanisms is described. However, publications32,35 describe guidelines for the design of commutation unit in satellite machines and in publication36 the methods to expand feed channels in satellite machines.
Satellite mechanisms are not only used in hydraulic motors. D. Sieniawski made the first attempt to use a 3 × 4 type mechanism in a satellite pump37. The pump with this mechanism was not put into production. In recent years, on the other hand, the first pumps fitted with a satellite working mechanism of the 4 × 6 type have been developed and built. The first information about the satellite pump with the 4 × 6 type satellite mechanism was given in21,38,39. Further work on the development of the satellite pump design was described by L. Osiecki in40,41. The latest design solution of the satellite pump can be found in the patent description in42.
Researchers are not only interested in developing the design of satellite machines but also in analysing the physical phenomena that occur in these machines. Papers27,43 have characterised the forces acting in the interacting teeth of the mechanism. Studies have also been carried out on the influence of liquids other than mineral oil on energy losses in satellite machines. These fluids were water and rapeseed oil. In the publication44 the influence of motor load and operating time on energy conversion efficiency is presented when this motor was supplied with rapeseed oil. Publications45,46 described the volumetric losses in satellite motors supplied with water. In47, on the other hand, the volumetric losses in a satellite pump were described. In addition, the mechanical losses that occur in both the satellite pump48 and the satellite motor49 when supplied with both water and mineral oil were analysed and described. In the paper50 the influence of water and mineral oil on the pressure losses in satellite machines was described. A method for determining these losses was also proposed in these papers. Jasinski, on the other hand, investigated the behaviour of a satellite motor under conditions of so-called thermal shock, i.e. when a very cold motor is fed with a hot working medium6.
As the shaft rotates, each working chamber changes its volume from a minimum value to a maximum value. This volume changes cyclically51,52,53,54. The volume of each working chamber of a positive displacement machine can be determined from the design documentation of this machine or by precise measurements of the components of the working mechanism (as described in34,54). The filling and emptying of the chambers with working liquid takes place while the machine shaft is rotating. The change in the volume of the working chambers as the shaft rotates causes the geometric working volume to change from a value of qg−min to qg−max34. A change in the geometric working volume is therefore accompanied by:
-
in the case of a pump – a non-uniformity (pulsation) of the pump delivery (output flow rate) and a non-uniformity of the torque on the pump shaft;
-
in the case of a hydraulic motor – a non-uniformity (pulsation) of the rotational speed of the motor shaft and a non-uniformity (pulsation) of the pressure drop in the motor.
Studies on the change in the geometric working volume as a function of the angle of rotation of the shaft of a satellite displacement machine have not yet been carried out on a large scale. The first attempts at an analysis were undertaken by Kujawski. However, Kujawski’s investigations were limited to satellite mechanisms of the 3 × 4 type51,55. Kujawski was the first to attempt to determine the torque based on the dimensions of the geometry of the rotor and the contact points of the satellites with this rotor, i.e. without knowledge of the geometric working volume55. Another attempt to determine the torque, similar to Kujawski in55, was made by Oshima et al. in29,30 for a 4 × 5 type satellite mechanism.
Therefore, this paper aims to develop mathematical formulae that allow to calculate for each type of satellite mechanism:
-
1.
the change in the volume of the one working chamber as a function of the angle of rotation of the rotor (shaft);
-
2.
the volumes of the filling chambers and the volumes of the emptying chambers as a function of the angle of rotation of the rotor;
-
3.
the total volume of the satellite mechanism;
-
4.
instantaneous value of the geometric working volume as a function of the angle of rotation of the shaft;
-
5.
for pump operation (at a constant shaft speed and constant pressure increase in the pump):
-
liquid flow rate in the one working chamber as a function of the shaft rotation angle;
-
instantaneous flow rate of the liquid in the satellite mechanism as a function of the shaft rotation angle;
-
the average flow rate in the pump;
-
the torque generated by the one working chamber as a function of the angle of rotation of the shaft based on the rotor geometry;
-
instantaneous torque generated by the entire working mechanism as a function of the shaft rotation angle;
-
irregularity (pulsation) of the pump delivery;
-
irregularity (pulsation) of the torque;
-
-
6.
for motor operation (at a constant flow rate in the working mechanism and constant load (torque) of the motor):
-
instantaneous rotational speed of the motor shaft for a constant flow rate;
-
average rotational speed of the motor shaft;
-
instantaneous pressure in the supply connection of the motor;
-
the average pressure in the supply connection of the motor;
-
irregularity (pulsation) of the pressure in the motor supply connection;
-
irregularity (pulsation) of the rotational speed of the motor shaft.
-
To confirm the validity of the above-mentioned mathematical relationships, experimental tests were also carried out on a satellite machine operating as a pump and as a hydraulic motor.
Working mechanism of the satellite positive displacement machine
In satellite positive displacement machines, i.e. pumps and motors, the working mechanism is the satellite mechanism as shown in Fig. 1. The 4 × 6 satellite mechanism is commonly used in currently developed machine designs. The design of this mechanism is shown in Figs. 2 and 3.


Satellite mechanism type 4 × 6: βR and βE – characteristics angle of the rotor R and curvature (description in the text), S(1) ÷ S(10) – satellites, IC – inflow channel, OC – outflow channel, pH – high pressure, pL – low pressure, pM – medium pressure, αR – angle of the rotor (shaft) rotation, αR-A – angle of rotor rotation for change from Vmin to Vmax, ω – angular velocity of the rotor, I ÷ X – working chambers. (created in Autodesk Autocad 2024, https://www.autodesk.com/)
A 4 × 6 satellite mechanism developed according to the methodology described in15 was analysed. The radius R of the rotor pitch line of this mechanism is described by the equation28:
where nR is the number of rotor humps (Fig. 4). The other parameters, i.e. α, A, B, D are shown in Fig. 4.

Parameters of the rolling line of the rotor of the 4 × 6 type mechanism: OZ – axis of symmetry of the hump lift, OR – axis of symmetry of the hump rebate, D – diameter of the base circle of the rotor, A, B – amplitudes of the cosine function (formula (1)), R – radius of the rotor corresponding to the angle α (formula (1)). (created in Autodesk Autocad 2024, https://www.autodesk.com/)
The parameters of the investigated and analysed mechanism are listed in Table 1.
In the table above:
-
nE – the number of curvature humps,
-
zE – the number of teeth on the curvature,
-
zR – the number of teeth on the rotor,
-
zS – the number of teeth on the satellite, m – the module of the teeth,
-
H – the height of the mechanism,
-
qg – the geometric working volume,
-
βR – the central angle covering one half of the cycle of the rotor pitch curve (the angle between the axis of symmetry OR of the hump concavity and the axis of symmetry OZ of the hump convexity) (Figs. 3 and 4)15:
$$\:{{\upbeta\:}}_{\text{R}}=\frac{{180}^{o}}{{\text{n}}_{\text{R}}}$$(2) -
βE – the central angle that covering one half of the cycle of the curvature pitch curve (the angle between the axis of symmetry of the hump concavity and the axis of symmetry of the hump convexity) (Fig. 3)15:
$$\:{{\upbeta\:}}_{\text{E}}=\frac{{180}^{o}}{{\text{n}}_{\text{E}}}$$(3) -
Ach-min – area of the chamber with minimum volume Vch-min (Figs. 2 and 3),
-
Ach-max – area of the chamber with maximum volume Vch-max (Figs. 2 and 3).
In a satellite mechanism, the number nch of working chambers is equal to the number nS of satellites, that is (Figs. 2 and 3)15:
Volume of the working chambers
In satellite mechanisms the volume Vch of the chamber changes as the rotor rotates from a value of Vch−min to a value of Vch−max. These volumes are expressed by the formulae33,34:
The total change in the volume of the working chamber is therefore33,34:
The change in working volume ΔVch from Vch−min to Vch−max take place over the following range of the rotor angle of rotation:
However, the entire cycle of the change in chamber volume, i.e. from Vch−min through Vch−max to Vch−min takes place within the angle range:
During one complete rotation of the shaft (αR = 360°), the one working chamber therefore performs the following number of filling and emptying cycles:
If during the rotation of the rotor, each working chamber changes its volume from Vch−min to Vch−max (formula (7)), then the number nvc of cycles of volume change of all working chambers during one complete rotation of the rotor (360° rotation) is as follows:
The total volume change of all working chambers per one full rotation of the shaft (αR = 360°) is therefore:
The geometric working volume qg of the mechanism is, therefore, a constant value and does not depend on the angle of rotation αR of the rotor (shaft) of the machine, but only depends on the number nvc of cycles of volume changes of all working chambers and on the difference between the maximum and minimum volume of the working chamber. Formulae (11) and (12), but without proof, have already been described in earlier publications, e.g. in33,34.
The start of the filling of each successive chamber (e.g. chamber I next to chamber II – Fig. 3) occurs after the rotor has turned through an angle of:
According to34,54, it is assumed that the field of the chamber for the angle of rotation of the rotor αR = 0 has a minimum value, i.e. Ach−min. Therefore, for the field Ach of the working chamber αR ≥ 0 changes its value depending on the rotor rotation angle αR according to34,54:
Therefore, the volume Vch of the working chamber also changes depending on the rotor rotation angle αR, i.e.:
So, if:
-
a.
\(\:{\alpha\:}_{R}\in\:\left(\frac{k}{{\text{n}}_{\text{E}\text{R}}}\cdot\:{360}^{o};\frac{2\cdot\:k+1}{{\text{n}}_{\text{E}\text{R}}}\cdot\:{180}^{o}\right)\), where k = 0,1,2,…. – an increase in the chamber volume takes place, i.e. a filling process;
-
b.
\(\:{\alpha\:}_{R}\in\:\left(\frac{2\cdot\:k+1}{{\text{n}}_{\text{E}\text{R}}}\cdot\:{180}^{o};\frac{k+1}{{\text{n}}_{\text{E}\text{R}}}\cdot\:{360}^{o}\right)\) – a reduction in the chamber volume takes place, i.e. an emptying process;
-
c.
\(\:{\alpha\:}_{R}=\frac{k}{{\text{n}}_{\text{E}\text{R}}}\cdot\:{360}^{o}\) – the volume of the working chamber is minimal (Vch-min);
-
d.
\(\:{\alpha\:}_{R}=\frac{2\cdot\:k+1}{{\text{n}}_{\text{E}\text{R}}}\cdot\:{180}^{o}\) – the volume of the working chamber is maximal (Vch-max).
Figure 5 shows the characteristics of the volume of the one working chamber of the satellite mechanism as a function of the angle of rotation αR of the rotor determined according to formulas (14) and (15).

The volume Vch of the working chamber of the satellite mechanism as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).
Formula (15) can be generalized for each chamber. This means that the volume of the working chamber with the number ‘ich’ for a certain angle of rotation αR of the rotor is:
Figure 6 shows the volume characteristics of all working chambers of the satellite mechanism as a function of the rotor rotation angle αR, which is determined according to Eq. (16).

Characteristics of the volume Vch of the working chambers of the satellite mechanism as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).

Characteristics of the volume Vch-in of the chambers with increasing volume (filled) as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°

Characteristics of the volume Vch-out of the chambers with decreasing volume (emptied) as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).
The sum of the volumes of all working chambers assumes a certain value, i.e.:
This means that the sum of the volumes of all the working chambers of the satellite mechanism is constant and independent of the angle of rotation αR of the shaft. For the satellite mechanism considered here, it is V = 13.045 cm3.
The volumes Vsm−in of all filled chambers and the volumes Vsm−out of all emptied chambers can be calculated according to relationships (16) and (17), provided that:
-
a.
for filled chambers:
$$\:{\alpha\:}_{R}\in\:\left(\frac{k}{{\text{n}}_{\text{E}\text{R}}}\cdot\:{360}^{o}+{\beta\:}_{E}\cdot\:\left({i}_{ch}-1\right)\cdot\:\left(k+1\right);\frac{2\cdot\:k+1}{{\text{n}}_{\text{E}\text{R}}}\cdot\:{180}^{o}+{\beta\:}_{E}\cdot\:\left({i}_{ch}-1\right)\cdot\:\left(k+1\right)\right)$$(18) -
b.
for emptied chambers:
$$\:{\alpha\:}_{R}\in\:\left(\frac{2\cdot\:k+1}{{\text{n}}_{\text{E}\text{R}}}\cdot\:{180}^{o}+{\beta\:}_{E}\cdot\:\left({i}_{ch}-1\right)\cdot\:\left(k+1\right);\left(\frac{{360}^{o}}{{\text{n}}_{\text{E}\text{R}}}+{\beta\:}_{E}\cdot\:\left({i}_{ch}-1\right)\right)\cdot\:{\left(k+1\right)}^{2}\right)$$(19)
For the satellite mechanism under consideration, the characteristics of Vsm−in and Vsm−out are shown in Figs. 9 and 10 respectively. These figures show the number of chamber that reach the minimum volume Vch−min (highlighted in yellow) and the maximum volume Vch−max (highlighted in green).

Volume Vsm-in of the filled working chambers as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).

Volume Vsm-out of the emptied working chambers as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).
From Figs. 7, 8, 9 and 10 it can be concluded that either four or six chambers are filled or emptied simultaneously during both filling and emptying. The number nch−in of filled chambers and the number nch−out of emptied chambers correspond to the number nR of humps of the rotor or the number nE of humps of the bypass, i.e.: nch−in = nch−out = nR or nch−in = nch−out = nE. Therefore, for each angle of rotation αR of the shaft the following relations is true:
where nch−d is the number of dead chambers (i.e. the number of chambers with a maximum volume Vch−max or a minimum volume Vch−min):
For example:
-
1.
for each angle αR ∈ (0;15°):
-
six chambers are filled simultaneously, i.e. chambers I, III, V, VI, VIII and X;
-
four chambers are emptied simultaneously, i.e. chambers II, IV, VII and IX;
-
-
2.
for each angle αR ∈ (15°;30o):
-
only four chambers are filled simultaneously, i.e. chambers I, III, VI and VIII;
-
six chambers are emptied simultaneously, i.e. chambers II, IV, V, VII, IX and X.
-
Flow rate in the satellite mechanism.
The flow rate Qch in the one working chamber (the so-called absorption capacity of the working chamber) is:
where ω is the angular velocity of the shaft (rotor). Therefore:
Figure 11 shows the flow rate Qch in the one working chamber as a function of the angle of rotation αR of the rotor, calculated according to formula (23).

Characteristics of the flow rate Qch in the one working chamber as a function of the angle of rotation αR of the rotor (shaft).
For any chamber with the number ich, for a given angle of rotation αR of the rotor, the above formula (23) takes the form:
Formulae (23) and (24) describe the flow rate of the liquid booth in the process of filling chambers (positive values of Qch, i.e.: Qch > 0) and in the process of emptying chambers (negative values of Qch, i.e.: Qch < 0). The process of filling the chambers takes place when the angle of rotation αR of the shaft fulfills the condition given in formula (18). The process of emptying the chambers takes place if the angle of rotation αR of the shaft fulfills the condition given in formula (19). Figures 12 and 13 show the liquid flow rate Qch-in in the filled chambers and the liquid flow rate Qch-out in the emptied chambers, respectively.

Characteristics of the liquid flow rate Qch-in in the filled chambers as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).

Characteristics of the liquid flow rate Qch-out in the emptied chambers as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).
The total flow rate Qms in the working mechanism is zero, i.e.:
The basic quantity defined in the theory of positive displacement machines is the delivery or absorptivity. The term delivery refers to pumps and denotes the volumetric quantity of liquid pumped by the pump per unit time (output flow rate)47. In contrast, the term absorptivity refers to motors and also denotes the volumetric quantity of liquid but absorbed by the motor per unit of time (derived inlet flow rate)46,50. Therefore, Eq. (25) cannot be a definition of the delivery or absorptivity of a satellite mechanism. The delivery or absorptivity Qi of the satellite mechanism should therefore be defined on the basis of formula (24) as:
-
a.
for \(\:\text{cos}\left(\left({\alpha\:}_{R}-{\beta\:}_{E}\cdot\:\left({i}_{ch}-1\right)\right)\cdot\:{n}_{ER}\right)\ge\:0\):
$$\:{Q}_{i}=\sum\:_{{i}_{ch}=1}^{{n}_{ch}}{Q}_{ch\left({i}_{ich}\right)}$$(26) -
b.
for \(\:\text{cos}\left(\left({\alpha\:}_{R}-{\beta\:}_{E}\cdot\:\left({i}_{ch}-1\right)\right)\cdot\:{n}_{ER}\right)\le\:0\):
$$\:{Q}_{i}=\sum\:_{{i}_{ch}=1}^{{n}_{ch}}\left|{Q}_{ch\left({i}_{ich}\right)}\right|$$(27)
Since the flow in the one working chamber depends on the angle of rotation αR of the shaft (formula (24)) formulas (26) and (27) define the instantaneous flow rate Qi in the entire working mechanism. The instantaneous value of Qi changes from the minimum value Qi−min to the maximum value Qi−max. The number of cycles of change from Qi−min to Qi−max is equal to the number nvc (formula (11)). The flow rates Qi, Qi−min, Qi−max, and Q for the satellite mechanism operating as a pump (at a constant angular velocity of the shaft ω = 1.047 rad/s) are shown in Fig. 14.

Characteristics of instantaneous flow rate Qi and average flow rate Q in the satellite mechanism as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).
The instantaneous geometric working volume
The flow rate Q in a positive displacement machine is also defined as26,33,34,54:
where n is the rotational speed of the shaft (rotor) in [rpm] and the geometric working volume qg is described by formula (12). The geometric working volume qg is assumed to be a constant value that is independent of the angle αR of rotation of the shaft. However, a comparison of formulae (24), (26) (or (27)) and (28)) shows something different. This means that the geometric working volume of the mechanism changes its value depending on the angle of rotation αR of the shaft. This means that for each angle of rotation αR of the shaft, there is an instantaneous value qgi of the geometric working volume. This value can be calculated by shifting and transforming the formulae (24), (26) and (28) accordingly, i.e.:
where ich−in is the number of the filling chamber. Thus, it can be concluded that the geometric working volume qg is the average of the instantaneous geometric working volumes qgi:
where ki = 1,2,…,xi is the number of values qgi from a specific interval of the angle of rotation αR of the shaft. It can be seen from Fig. 14 that the values of qgi should be calculated for angles of rotation αR of the shaft from any interval \(\:\frac{{360}^{o}}{{n}_{vc}}\). The characteristics of the instantaneous geometric working volume qgi are shown in Fig. 15.

Characteristics of the instantaneous geometric working volume qgi and the average geometric working volume qg of the satellite mechanism as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).
The results of the analyses prove that the instantaneous qgi value of the geometric working volume varies from a minimum value of qgi−min to a maximum value of qgi−max depending on the angle of rotation αR of the shaft. The value of qgi−max occurs when in the formula (29) the term \(\:\sum\:_{{i}_{ch-in}=1}^{{n}_{ch-in}}\text{cos}\left(\left({\alpha\:}_{R}-{\beta\:}_{E}\cdot\:\left({i}_{ch-in}-1\right)\right)\cdot\:{n}_{ER}\right)=max.\), while the value qgi−min takes place if \(\:\sum\:_{{i}_{ch-in}=1}^{{n}_{ch-in}}\text{cos}\left(\left({\alpha\:}_{R}-{\beta\:}_{E}\cdot\:\left({i}_{ch-in}-1\right)\right)\cdot\:{n}_{ER}\right)=min.\) From the characteristics shown in Fig. 15, it can be seen that the value of qgi−min occurs for \(\:{\alpha\:}_{R}=k\cdot\:\frac{{360}^{o}}{{n}_{ER}}\), while the vsalue qgi−max takes place for \(\:{\alpha\:}_{R}=\frac{{180}^{o}}{{n}_{ER}}\cdot\:\left(1+2\cdot\:k\right)\), where k = 0,1,2,…. The number of cycles of change from qgi−min to qgi−max is equal to the number of nvc (formula (11)).
The instantaneous delivery of the pump and the irregularity (pulsation) of delivery
The rotational speed n of the shaft is the independent parameter for each positive displacement pump47,48. Therefore, if n = const. (ω = const.), the the geometric working volume qg changes depending on the angle of rotation αR of the shaft and thus the pump delivery changes also. In other words, the instantaneous delivery Qi of the pump occurs (Fig. 14), that is :
A ssociated with the concept of instantaneous delivery Qi of the pump is the concept of the irregularity δQ of the delivery of this pump (or, in other words, pulsation of the delivery of the pump), defined as2,4:
Taking into account formulae (29), (30) and (31), the pulsation of the delivery can be defined as32:
The instantaneous rotational speed of the hydraulic motor and the irregularity (pulsation) of the rotational speed
The flow rate Q (absorption) is the independent parameter for each hydraulic motor33,46,50. So, if Q = const., the change in the geometric working volume qg as a function of the angle of rotation αR of the shaft leads to a change in the rotational speed of the shaft. In other words, the instantaneous rotational speed ni of the motor shaft occurs, i.e.:
From this, it can be concluded that the rotational speed n of the hydraulic motor shaft is the average of the instantaneous rotational speeds ni:
where ki = 1,2,…,xi is the number of values qgi from a specific interval of the angle of rotation αR of the shaft. It can be seen from Fig. 14 that the values of ni should be calculated for angles of rotation αR of the shaft from any interval \(\:\frac{{360}^{o}}{{n}_{vc}}\). The characteristics of the instantaneous rotational speed ni and the average speed n at Q = const. are shown in Fig. 16.

Characteristics of instantaneous rotational speed ni and the average rotational speed n of the rotor (shaft) as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).
Associated with the concept of instantaneous rotational speed ni of the motor shaft is the concept of the irregularity δn of the motor rotational speed (or, in other words, pulsation of the motor rotational seed), defined as:
Taking formulae (29), (30) and (34) into account, the pulsation of the rotational speed δn can be defined as:
Torque on the pump shaft and irregularity (pulsation) of the torque
In hydraulic positive displacement machines without energy losses, the mechanical power is converted into hydraulic power (in the pump) or vice versa (in the motor)2, i.e.:
The relationship between the pressure difference in the working chambers and the torque on the shaft of the positive displacement machine is therefore as follows:
In the pump, the pressure pH in the high-pressure working chamber HPC (Figs. 2 and 3) is the result of the hydraulic system load and the pressure drop in the internal channel of the pump connecting the HPC chamber to the external pump connection. On the other hand, the pressure pL in the low-pressure working chamber LPC (Figs. 2 and 3) is the result of the pressure drop on the way from LPC chamber to the tank. The pressure increase in the pump is therefore a parameter independent of the pump. The torque M required to drive the pump is the effect of the pressure increase in this pump and depends on the geometric working volume qg (formula (39)). Because the geometric working volume qg assumes a constant value (qg = const.), regardless of the angle of rotation αR of the shaft, the torque M on the pump shaft is also constant (M = const.) according to the above formula (39) and represents an average value.
The torque M required to drive the pump can also be determined as an average value of the values of the instantaneous torques Mi. The instantaneous torque Mi is the torque generated by the working mechanism for a certain angle of rotation αR of the shaft (rotor). Therefore:
where kj = 1,2,3,…,xj is the number of values of the instantaneous torque Mi within one full rotation of the shaft.
In order to calculate the instantaneous values of the torque Mi on the pump shaft for given constant values of pressure pH and pL, it is necessary to calculate the values of the torque Mw(ich) “generated” by each working chamber as a function of the angle of rotation αR of the shaft. That is, the instantaneous torque Mi can be calculated as:
where:
-
\(\:\overrightarrow{{M}_{w\left({i}_{ch}\right)}}\) – the torque “generated” by the working chamber (numbered ich):
 (42)
(42) -
\(\:\overrightarrow{{M}_{w\left({i}_{ch}\right)-R}}\) – the torque “generated” by the action of pressure in the chamber number ich on the rotor;
-
\(\:\overrightarrow{{M}_{w\left({i}_{ch}\right)-S1}}\) – the torque “generated” by the action of pressure in the chamber number ich on the first satellite;
-
\(\:\overrightarrow{{M}_{w\left({i}_{ch}\right)-S2}}\) – the torque “generated” by the action of pressure in the chamber number ich on the second satellite, adjacent to the first satellite;
-
\(\:\overrightarrow{{M}_{i-HPC}}\) – the torque “generated” by the high pressure pH in all high-pressure chambers (HPC);
-
\(\:\overrightarrow{{M}_{i-LPC}}\) – the torque “generated” by the low pressure pL in all low-pressure chambers (LPC).

The values of the torques mentioned above can be calculated as follows:
-
1.
The torque “generated” by the rotor
$$\:{M}_{w\left({i}_{ch}\right)-R}={p}_{\left({i}_{ch}\right)}\cdot\:H\cdot\:{\int\:}_{\propto\:={\propto\:}_{\left(S1\right)}}^{\propto\:={\propto\:}_{\left(S2\right)}}{r}_{R}\cdot\:R\cdot\:d\propto\:$$(43)where (Fig. 17):
-
p(ich) = pH or p(ich) = pL – the pressure in the chamber with the number ich;
-
R – the radius of the rotor according to formula (1);
-
rR – the distance between the centre of rotation of the rotor (with the coordinates xo,yo) and the straight line defining the direction of the force dFR (respectively dFR-H for the high-pressure chamber HPC and dFR-L for the low-pressure chamber LPC):
$$\:{r}_{R}=\sqrt{{\left({x}_{F}-{x}_{o}\right)}^{2}+{\left({y}_{F}-{y}_{o}\right)}^{2}}$$(44)$$\:{x}_{F}=\frac{1}{2}\cdot\:\frac{\frac{{y}_{R1}-{y}_{R2}}{{x}_{R1}-{x}_{R2}}\cdot\:\left({x}_{R1}+{x}_{R2}\right)+{y}_{R1}+{y}_{R2}}{\frac{{y}_{R1}-{y}_{R2}}{{x}_{R1}-{x}_{R2}}+\frac{{x}_{R1}-{x}_{R2}}{{y}_{R1}-{y}_{R2}}}$$(45)$$\:{y}_{F}=\frac{1}{2}\cdot\:\frac{{x}_{R1}+{x}_{R2}+\frac{{x}_{R1}-{x}_{R2}}{{y}_{R1}-{y}_{R2}}\cdot\:\left({y}_{R1}+{y}_{R2}\right)}{\frac{{y}_{R1}-{y}_{R2}}{{x}_{R1}-{x}_{R2}}+\frac{{x}_{R1}-{x}_{R2}}{{y}_{R1}-{y}_{R2}}}$$(46) -
xR1, yR1 and xR2, yR2 – the coordinates of the points on the rotor for the angle α and for the angle α + dα respectively;
the torque “generated” by the first satellite:
 (47)$$\:{r}_{S1}=\sqrt{{\left({x}_{F1}-{x}_{o}\right)}^{2}+{\left({y}_{F1}-{y}_{o}\right)}^{2}}$$(48)
(47)$$\:{r}_{S1}=\sqrt{{\left({x}_{F1}-{x}_{o}\right)}^{2}+{\left({y}_{F1}-{y}_{o}\right)}^{2}}$$(48)where (Fig. 17):
-
xF1 and yF1 – the coordinates of the point F located on the pitch line of the rotor and can be calculated using the formula (1) assuming α = α(S1);
-
xE1 and yE1 – the coordinates calculated according to the method described in15.
the torque “generated” by the second satellite:
 (49)$$\:{r}_{S2}=\sqrt{{\left({x}_{F2}-{x}_{o}\right)}^{2}+{\left({y}_{F2}-{y}_{o}\right)}^{2}}$$(50)
(49)$$\:{r}_{S2}=\sqrt{{\left({x}_{F2}-{x}_{o}\right)}^{2}+{\left({y}_{F2}-{y}_{o}\right)}^{2}}$$(50)where (Fig. 17):
-
xF2 and yF2 – the coordinates of the point F located on the pitch line of the rotor and can be calculated using formula (1) assuming α = α(S2);
-
xE2 and yE2 – the coordinates calculated according to the method described in15.
-



The basic parameters of the satellite mechanism for calculating the torque. Description in the text. (created in Autodesk Autocad 2024, https://www.autodesk.com/)
The characteristics of the torques Mw(1)−R, Mw(1)−S1, Mw(1)−S2, Mw(1)−S and Mw(1) “generated” by the pressure in the first working chamber (chamber No. I – ich=1) are shown in Figs. 18, 19 and 20.

Characteristics of the torque “generated” by working chamber No. I (ich=1) in the range of the shaft rotation angle αR, which corresponds to the change in chamber volume from Vch-min to Vch-max (high pressure pH in the chamber).

Characteristics of the torque “generated” by working chamber No. I (ich=1) in the range of the shaft rotation angle αR, which corresponds to the change in chamber volume from Vch-max to Vch-min (low pressure pL in the chamber).

Characteristics of the torque “generated” by the working chamber No. I (ich=1) as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).
Analysing the results of the torque calculations shows that in the satellite mechanism:
-
a.
during the filling of the chamber (high pressure pH) (Figs. 18 and 20):
-
the maximum value of the torque “generated” by the rotor occurs for the angle of rotation of the shaft \(\:{\alpha\:}_{R}={180}^{o}\cdot\:\left(\frac{1}{{n}_{R}}+k\cdot\:\frac{2}{{n}_{ER}}\right)\), where k = 0,1,2,…;
-
the lowest value of the torque “generated” by the first satellite occurs for the angle of rotation of the shaft \(\:{\alpha\:}_{R}=k\cdot\:\frac{{360}^{o}}{{n}_{ER}}\), where k = 0,1,2,…;
-
the highest value of the torque “generated” by the second satellite occurs for the angle of rotation of the shaft \(\:{{\alpha\:}_{R}=180}^{o}\cdot\:\left(\frac{1}{{n}_{E}}+k\cdot\:\frac{2}{{n}_{ER}}\right)\), where k = 0,1,2,…;
-
-
b.
during the emptying of the chamber (low pressure pL) (Figs. 19 and 20):
-
the minimum value of the torque ‘generated’ by the rotor occurs for the angle of rotation of the shaft \(\:{\alpha\:}_{R}={180}^{o}\cdot\:\left(\frac{1+2\cdot\:k}{{n}_{ER}}+\frac{1}{{n}_{E}}\right)\), where k = 0,1,2,…;
-
the lowest value of the torque ‘generated’ by the first satellite occurs for an angle of rotation of the shaft \(\:{\alpha\:}_{R}={360}^{o}\cdot\:\left(\frac{2}{{n}_{E}}+k\cdot\:\frac{1}{{n}_{ER}}\right)\), where k = 0,1,2,…;
-
the highest value of the torque ‘generated’ by the second satellite occurs for the angle of rotation of the shaft \(\:{\alpha\:}_{R}=k\cdot\:\frac{{360}^{o}}{{n}_{ER}}\), where k = 0,1,2,….
-
The characteristics of the torque “generated” by all working chambers of the satellite mechanism are shown in Fig. 21.

Characteristics of the torque Mw(ich) “generated” by all working chambers as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).
The torque “generated” by the one working chamber depends on the shaft rotation angle αR. Consequently, the torque Mi expressed by formula (41) is also a function of the shaft rotation angle αR. The instantaneous value of Mi varies from a minimum value of Mi−min to a maximum value of Mi−max. The number of cycles of change from Mi−min to Mi−max is equal to the number nvc (formula (11)). Characteristics of the torques Mi, Mi−min, Mi−max, and M “generated” in the satellite mechanism (pump operation) at a constant pressure increase in the mechanism (Δp = pH–pL = 0.9 MPa) are shown in Fig. 22.

Characteristics of the torque “generated” by the low-pressure working chambers (Mi-LPC) and the high-pressure working chambers (Mi-HPC). Characteristics of the instantaneous torque Mi and the average torque M as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).
The results of the analyses show that the instantaneous value of the torque Mi is a function of the angle of rotation αR of the shaft and varies from a minimum value of Mi−min to a maximum value of Mi−max (Fig. 22). The value Mi−min occurs for \(\:{\alpha\:}_{R}=k\cdot\:\frac{{180}^{o}}{{n}_{E}}\), but the value Mi−max occurs for \(\:{\alpha\:}_{R}=\frac{{360}^{o}}{\left({n}_{E}+{n}_{R}\right)\cdot\:{n}_{R}}+k\cdot\:{\beta\:}_{E}\) and \(\:{\alpha\:}_{R}=\frac{1}{2\cdot\:\left({n}_{E}+{n}_{R}\right)}\cdot\:\left(\frac{{180}^{o}}{{n}_{R}}+{n}_{R}\cdot\:\left({\beta\:}_{R}-{\beta\:}_{E}\right)\right)+k\cdot\:{\beta\:}_{E}\), where k = 0,1,2,…. The number of cycles of change from Mi−min to Mi−max is equal to \(\:\frac{{n}_{vc}}{2}\).
Associated with the concept of instantaneous torque Mi on the pump shaft is the concept of the torque irregularity δM (or in other words the pulsation of the torque), defined as:
Since the value of the torque on the pump shaft changes from Mi−min to Mi−max, according to formula (39), for pH = const. and pL = const. there is a change in the working volume from qgi(M)−min to qgi(M)−max. In contrast to the instantaneous geometric working volume qgi, the working volume qgi(M) is referred to be called the instantaneous torque working volume.
The instantaneous torque working volume qgi(M) can therefore be determined from the calculated instantaneous torque Mi using formula (39) after a suitable transformation, i.e.:
Thus, it can be concluded that the torque working volume qg(M) is the average of the instantaneous working volumes qgi(M):
gdzie kl = 1,2,…,xl is the number of values of qgi(M) from a specific range of the shaft rotation angle αR. It can be seen from Fig. 22 that the values of qgi(M) should be calculated for angles of rotation αR of the shaft from any interval \(\:\frac{{360}^{o}}{{n}_{vc}}\). The characteristics of the instantaneous torque working volume qgi(M) and the average value qg(M) are shown in Fig. 23.

Characteristics of the instantaneous torque working volume qgi(M) and the average torque working volume qg(M) as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).
The analyses show that the torque working volume of the tested satellite mechanism is qg(M) = 18.81 cm3/rev.
Pressure in the working chambers of the hydraulic motor and the irregularity (pulsation) of the pressure
In a hydraulic motor, the torque M is the load acting on this motor and is therefore a motor-independent parameter43,44,49. On the other hand, the pressure pH in the high-pressure working chamber HPC is the effect of the load M of this motor and also depends on:
-
1.
the geometric working volume qg;
-
2.
the pressure pL in the low-pressure working chamber LPC. This pressure is the effect of the pressure drop on the way from the LPC chamber to the liquid reservoir.
Assuming that there are no energy losses in the motor the pressure in the HPC chamber after the transformation of Eq. (39) is therefore:
If M = const., qg = const. and pL = const. then also pH = const. and it is an average value.
If, for a hydraulic motor, M = const. (a motor-independent parameter, as mentioned above), the pressure pH in the HPC chamber changes as a result of the change in the geometric working volume (as a function of the angle of rotation αR of the shaft). In the HPC chamber of the motor there is therefore an instantaneous pressure pHi, viz.:
The characteristics of the instantaneous pHi and the average pH pressure in the high-pressure chamber HPC at M = const. and pL = const. are shown in Fig. 24.

Characteristics of the instantaneous pHi and the average pressure pH as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°).
Since the instantaneous pressure pHi in the high-pressure chamber HPC is influenced by the instantaneous torque working volume qgi(M), the following applies:
-
a.
the minimum values of the instantaneous pressure pHi-min occur for \(\:{\alpha\:}_{R}=\frac{{180}^{o}}{{n}_{ER}}\cdot\:\left(1+2\cdot\:k\right)\), where k = 0,1,2,….
-
b.
the maximum values of the instantaneous pressure pHi-max occur for \(\:{\alpha\:}_{R}=k\cdot\:\frac{{360}^{o}}{{n}_{ER}}\).
On the other hand, the concept of instantaneous pressure pHi in the high-pressure chamber HPC of a hydraulic motor is associated with the concept of pressure irregularity δP (or otherwise pressure pulsation), defined as:
Tested satellite machine
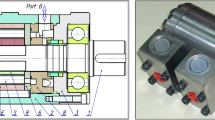
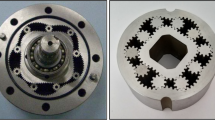
The satellite pump shown in Fig. 25 was the subject of the study. The working mechanism of this pump is shown in Fig. 26. Figure 27 shows the commutation plates as key elements adjacent to the working mechanism. The principle of operating of the satellite pump has been described in detail in the publicly available literature, for example in42,47,48.

Tested pump (satellite pump): E – external gear (curvature), S – satellite, R – rotor, 1 – shaft, 2 and 3 – housing, 4 – suction (inflow) manifold, 5 – pumping (outflow) manifold, 6 – high-pressure commutation (compensation) plate, and 7 – low-pressure commutation (compensation) plate, 8 – cover of the shaft chamber.
The theoretical working volume of the pump is qt = 18,87 cm3/rev.


Test rig
The experimental investigation of the satellite pump was carried out on the test rig shown in Figs. 28 and 29. This stand is equipped with a self-braking worm gear WG (Figs. 28 and 29 (grey)). This gear unit enables the maintance of a constant rotational speed of the shaft of the tested machine TM. The rotation of the shaft of the tested machine TM is possible only when the electric motor E1 is started. The speed n of the shaft of the tested machine TM can be set by adjusting the rotational speed of the electric motor E1 using a current frequency converter. The range of the rotational speed n can be set in the range of n = 0.5 ÷ 15 rpm.

The test stand – hydraulic system and measuring system: P – pump, TM – tested machine (pump or motor), IP – impeller pump (centrifugal pump), SV – safety valve, F – filter, TA – tank, WG – self-locking worm gear, E1 and E2 – electric motors with frequency converters, E3 – electric motor, DR – data recorder, p1, p2 – pressure transducers, t1, t2, tT – temperature transducers, Qp – flowmeter, FT – force transducer for torque M measurement, n – inductive sensor for rotational speed measurement. (created in Autodesk Autocad 2024, https://www.autodesk.com/)

View of the test stand with worm gear (grey colour) (left) and the satellite pump on the test stand (right).
The constant pressure drop Δp in the connections of the tested machine TM was maintained by setting the speed of the pump P (and thus its displacement accordingly), the safety valve SV and accumulator A (Fig. 28).
As the displacement machine TM is tested at very low speeds, the flow rate Qp in this machine will be very small and therefore the pressure drop Δpich in the internal channels of this machine can be neglected (Δpich ≈ 0). Then pH = p1 and pL = p2.
The measured parameters at the test stand are listed in Table 2.
In the above-mentioned test stand, it is not possible to set and maintain a constant torque on the shaft of the tested machine working as a motor. It is also not possible to test the irregularity of the motor rotational speed at a constant flow rate supplying this motor, as the worm gear maintains a constant speed (n = const.).
The working liquid in the test stand was mineral oil Total Azolla ZS 46.
Results of laboratory tests
The test of the satellite displacement machine was carried out at a low constant speed (n = 1 rpm) and two different pressure values p1 (p1 = 5 MPa and p1 = 10 MPa). For comparison purposes, the tests were carried out for both operation as a pump and operation as a motor. The viscosity of the mineral oil was maintained at a constant level ν = 40±2 cSt. The following parameters were recorded during the tests:
a. the flow rate Qp in the machine operating as a pump (Figs. 30) and operating as a motor (Fig. 31) as a function of the angle of rotation αR of the shaft;
b. the torque Mp on the shaft of the machine operating as a pump (Fig. 32) and operating as a motor (Fig. 33) as a function of the angle of rotation αR of the shaft.

Characteristics of the actual flow rate Qp in the machine working as a pump as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°). The pressure loading the pump: p1 = 5 MPa and p1 = 10 MPa.

Characteristics of the actual flow rate Qp in the machine working as a motor as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°). The pressure in the inflow port of the motor: p1 = 5 MPa and p1 = 10 MPa.

Characteristics of the torque Mp on the shaft of the machine working as a pump as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°). The pressure loading the pump: p1 = 5 MPa and p1 = 10 MPa.

Characteristics of the torque Mp on the shaft of the machine working as a motor as a function of the angle of rotation αR of the rotor (within one complete rotation of the rotor – αR = 360°). The pressure in the inflow port of the motor: p1 = 5 MPa and p1 = 10 MPa.
Discussion
In the satellite working mechanism, the sum of the volumes of all working chambers is constant and independent of the angle of rotation αR of the shaft (formula (17)). In the satellite mechanism presented in this article, the volume of all working chambers is V = 13.045 cm3.
In the satellite mechanism, the number of filled chambers at the same time is equal to either the number of humps on the rotor or the number of humps on the curvature. In the considered mechanism type 4 × 6:
-
a.
if four chambers are filled then:
-
six chambers are emptied,
-
or four chambers are emptied and the other two chambers are dead (i.e. with maximum or minimum volume);
-
-
b.
if six chambers are filled, then four chambers are always emptied.
The analysis proves that in the satellite mechanism during the rotation of the rotor (shaft), the value of the working volume changes from the minimum value qi−min to the maximum value qi−max (according to formula (29)).
For a satellite mechanism operating as a pump, the rotational speed of the shaft of the pump is constant (Q = const.). Therefore, because of the instantaneous geometric working volume qgi, the displacement Q of the pump will change from the minimum value Qi−min to the maximum value Qi−max as a function of the angle of rotation αR of the shaft. This means there is an instantaneous delivery Qi of the pump (formulae (26) and (27)). The number of cycles of change of these values is equal to the number of cycles nvc of change of the volume of all working chambers (formula (11)). The relative change in the value of the delivery was called the pulsation of the delivery δQ (formula (33)). The value of this pulsation is the theoretical value and represents the maximum value for the pump.
If the flow rate is constant (Q = const.) in the satellite mechanism operating as a motor then due to the existence of the instantaneous geometric working volume qgi, the change in the rotational speed of the shaft will occur (as a function of angle of rotation αR of the shaft). That is, will be the instantaneous rotational speed ni of the motor shaft (formula (34)), the value of which changes from ni−min to ni−max. The relative change in the value of this speed was called the pulsation of the rotational speed δn (formula (37)). The value of this pulsation is the theoretical value and represents the maximum value for the hydraulic motor.
The results of the analysis show, that in the satellite mechanism:
-
1.
the value of pulsation of the rotational speed δn (formula (37))is greater than the value of pulsation of the displacement δQ (formula(33)). For the satellite mechanism presented in this paper is δQ = 4.95% and δn = 5.04%;
-
2.
the value of pulsation of the torque δM (formula (51)) is greater than the value of pulsation of the pressure δp (formula (56)). For the satellite mechanism presented in this paper is δM = 4.56% and δn = 3.1%.
In the real positive displacement machines (pump and motor) the pressure difference in the working mechanism has an influence on the real values of pulsations. The most important influencing factors are the compressibility of the liquid and leakages in the gaps of the working mechanism. The leakages in the satellite pump and in the motor are described in detail in47 and46 respectively.
To summarise, it can be concluded that:
-
on the pulsation of the delivery of the pump δQ,
-
on the pulsation of the torque on the pump shaft δM,
-
on the pulsation of the pressure in the motor inflow port δp,
-
on the pulsation of the rotational speed of the motor shaf δn.
influences the following parameters:
-
the number of the humps nR of the rotor,
-
the number of the humps nE of the curvature,
-
the minimum Ach-min and maximum Ach-max values of the working chamber area,
-
the height H of the satellite mechanism.
In the satellite mechanism, all pulsations (δQ, δn, δM, δP) will decrease when the number of the working chambers, i.e. the number nE of curvature humps and the number nR of rotor humps increases. For the satellite mechanisms presented in the publication15, the lowest pulsation occurs for the mechanism type 8 × 10 (nR=8, nE=10).
Equation (41)÷(50) show that the instantaneous value of the torque Mw(ich) „generated” by the one working chamber does not depend on the volume of this chamber, but on the shape of the pitch line of the rotor (i.e. the rotor outline). In each working chamber, the torque from the one satellite is added to the torque from the rotor, but the torque from the second satellite is subtracted (Figs. 18 and 19). This means that the second satellite „lowers” the value of the torque “generated” by the working chamber.
The working volume of the satellite mechanism calculated according to formulae (52) and (53), i.e. based on the torque generated by the working mechanism at certain constant pressures pH and pL in the working chambers, is proposed to call the torque working chamber qg(M). The analyses show that the average value of the torque working volume of the considered satellite mechanism is equal to the geometric working volume (i.e. qg(M) = qg) (Fig. 34). This proves that the theoretical analyses were performed out correctly.

Comparison of the instantaneous and average torque working volume (qgi(M) and qg(M)) with the instantaneous and average geometric vorking volume (qgi and qg) calculated according to formulae (29) and (30).
The results of the experiment confirmed the results of the theoretical analyses regarding the torque on the pump shaft, i.e. the value of the torque on the pump shaft:
-
a.
is a function of the angle of rotation αR of the shaft;
-
b.
reaches a minimum every 15° and also a maximum every 15o (Figs. 22 and 31).
If the value of the torque M changes during the rotation of the shaft at a constant rotational speed (n = const.) and at a constant inflow pressure (p1 = const.), this indicates a change in the value of the volume of the working chamber during this rotation. This in turn confirms the results of theoretical analyses (Figs. 15 and 23). Therefore, if qg = f(αR) then also for n = const. is Q = f(αR) (Fig. 14). The results of the experiment (Figs. 30 and 32) do not show this clearly because the actual flow rate in the positive displacement machine is:

where QL is the volumetric loss (leakage), the sign “+” refers to the hydraulic motor, and the sign “–“ refers to the pump. The volumetric losses QL are mainly leakages in the timing gaps (leakages in the commutation unit) and in the flat gaps of the satellite mechanism. At a very low rotational speed of the shaft, the proportion of this loss QL is quite large, especially the loss resulting from leakages in timing gaps (Figs. 30 and 32). The process of these leakages has been described in detail in35 and leakages in flat gaps in47,46.
Theoretical analyses show that for p1 = 5 MPa is M = 14.7 Nm and for p1 = 10 MPa is M = 29.4 Nm (Fig. 22). However, the experimental results showed, that the average value of the torque on the shaft of the machine:
-
1.
operating as a pump is greater than the theoretical value of the torque M and is Mp = 23,7 Nm for p1 = 5 MPa and Mp = 42,6 Nm for p1 = 10 MPa (Fig. 31).
-
2.
operating as a hydraulic motor is lower than the theoretical value of the torque M and is Mp = 8.7 Nm for p1 = 5 MPa and Mp = 22.4 Nm for p1 = 10 MPa (Fig. 33).
The relationship between the value of the torque Mp resulting from the experiment and the theoretical value of the torque M is as follows:
where ML is the loss of the torque, the sign “–” refers to the hydraulic motor, and the sign “+“ refers to the pump. The loss of the torque ML in the satellite pump and the satellite motor has been described in detail in48,49.
Summary
The mathematical relationships presented in this article make it possible to calculate the basic operating parameters of hydraulic pumps and motors equipped with any type of satellite mechanism. The correctness of the theoretical analyses of flow rate and torque in the satellite mechanism has been confirmed experimentally. It has also been shown that testing both the pump and the motor at constant speed allows not only the determination of torque and flow rate pulsations but also the observation of the volumetric and mechanical losses that occur in the working mechanism. It can be concluded that low constant speed testing can be considered a fundamental test for prototype hydraulic pumps and motors.
Based on the analyses carried out in this paper, it can be concluded that the satellite mechanisms with the highest number of humps on both the rotor and the curvature will have the best operating characteristics. Therefore, it is advisable to develop and build a displacement machine in the future that contains a satellite mechanism of the 8 × 10 type. 80 cycles of filling and emptying the working chambers correspond to one full rotation of the rotor of such a mechanism. Such a machine will be therefore characterised by the lowest pressure and speed pulsation (in the case of motor operation) and the lowest capacity and torque pulsation (in the case of pump operation).
The theoretical analyses presented in this paper form the starting point for the development of a mathematical model of rotational speed and pressures in a multi-speed satellite motor, i.e. the so-called digital satellite motor.
Data availability
The datasets used and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Sieniawski, B. Silnik Hydrauliczny obiegowo-krzywkowy (eng. Rotary-cam hydraulic motor). Patent PL 71329. https://ewyszukiwarka.pue.uprp.gov.pl/search/pwp-details/P.151883?lng=pl (1974).
Balawender, A. Analiza energetyczna i Metodyka Badań Silników Hydraulicznych Wolnoobrotowych (Energy analysis and methodics of testing of low-speed hydraulic motors). (Scientific Book of the Gdansk University of Technology, Mechanika No. 54. Gdansk University of Technology Publishing House, 1988).
Ulatowska, A. Parametric 3D model of a planetary gear motor. Czas Tech. Mech. 105. https://repozytorium.biblos.pk.edu.pl/resources/33942 (2008).
Stryczek, S. Napęd Hydrostatyczny (WNT, 2005).
JianGang, L., XuTang, W. & ShiMin, M. Numerical computing method of noncircular gear tooth profiles generated by shaper cutters. Int. J. Adv. Man. Tech. https://doi.org/10.1007/s00170-006-0560-0 (2007).
Jasinski, R. Analysis of the heating process of hydraulic motors during start-up in thermal shock conditions. Energies https://doi.org/10.3390/en15010055 (2022).
Catalog of of satellite motors type SOK of Hydro-precyzja company. https://www.hydro-precyzja.pl/ (Access date 10 Oct 2024).
Kujawski, M. Mechanizmy Obiegowe Z Nieokrągłymi Kołami Zębatymi, Podstawy Projektowania I Wykonania (eng. Circulation Mechanisms with non-circular Gears: the Basics of Design and manufacturing) (Poznan University of Technology Publishing House, 1992).
Catalog of satellite motors of SM-Hydro company. https://smhydro.com.pl (Access date 10 Oct 2024).
Catalog of satellite motors of PONAR company. https://www.ponar-wadowice.pl/en/n/new-product-satellite-motors (Access date 10 Oct 2024).
Catalog of satellite motors of HYDROMECH company. https://hydromechsa.pl/pl/produkcja/planetarne-silniki-hydrauliczne-emulsyjne-i-olejowe (Access date 10 Oct 2024).
Sieniawski, B. & Potulski, H. Hydrauliczny Silnik satelitowy (eng. Hydraulic satellite motor). Patent PL 137642. https://ewyszukiwarka.pue.uprp.gov.pl/search/pwp-details/P.234335?lng=pl (1984).
Sieniawski, B. Maszyna Wyporowa typu obiegowo-krzywkowego Z Kompensacją Luzów, Zwłaszcza Jako Silnik Hydrauliczny O Dużej Chłonności (eng. Planetary cam type displacement machine with axial play taking up feature, in particular that used as a hydraulic motor of high specific absorbing capacity). Patent PL 185724. https://ewyszukiwarka.pue.uprp.gov.pl/search/pwp-details/P.321438?lng=pl (1997).
Balawender, A., Elgert, K., Gumos, M., Sobiechowski, T. & Sliwinski, P. Directions of research work on hydraulic satellite motors with axial clearance compensation. Hyd I Pneum 4. https://www.researchgate.net/publication/382130564_Directions_of_research_work_on_hydraulic_satellite_motors_with_axial_clearance_compensation#fullTextFileContent (2003).
Sliwinski, P. The methodology of design of satellite working mechanism of positive displacement machine. Sci. Rep. 12, 13685. https://doi.org/10.1038/s41598-022-18093-z (2022).
Volkov, G. & Kurasov, D. Planetary rotor hydraulic machine with two central gearwheels having similar tooth number. In Advanced Gear Engineering. Mechanisms and Machine Science vol. 51. https://doi.org/10.1007/978-3-319-60399-5_21 (Springer, 2018).
Kurasov, D. Geometric calculation of planetary rotor hydraulic machines. IOP Conf. Ser. Mat. Sci. Eng. https://doi.org/10.1088/1757-899X/862/3/032108 (2020).
Volkov, G., Fadyushin, D. & Vedernikov, M. Geometric calculation of non-circular gear segments of the planetary mechanism in rotary hydraulic machines. E3S Web of Conf. https://doi.org/10.1051/e3sconf/202338901017 (2023).
Volkov, G., Kurasov, D. & Gorbunov, M. Geometric synthesis of the planetary mechanism for a rotary hydraulic machine. Russ Eng. Res. https://doi.org/10.3103/S1068798X18010161 (2018).
Volkov, G. & Fadyushin, D. Improvement of the method of geometric design of gear segments of a planetary rotary hydraulic machine. JOP Conf. Ser. J. Phys. https://doi.org/10.1088/1742-6596/1889/4/042052 (2021).
Wang, C., Luan, Z. H. & Gao, W. P. Design of pitch curve of internal-curved planet gear pump strain in type N-G-W based on three-order ellipse. AMR. https://doi.org/10.4028/www.scientific.net/amr.787.567 (2013).
Kurasov, D. Selecting the shape of centroids of round and non-round gears. IOP Conf. Ser. Mat. Sci. Eng. https://doi.org/10.1088/1757-899X/919/3/032028 (2020).
Volkov, G., Smirnov, V. & Mirchuk, M. Estimation and ways of mechanical efficiency upgrading of planetary rotary hydraulic machines. IOP Conf. Ser. Mat. Sci. Eng. https://doi.org/10.1088/1757-899X/709/2/022055 (2020).
Liu, Y., Wu, L., Dong, C. & Wang, F. Investigation of contact ratio and dynamic characteristics of non-circular planetary gear train in hydraulic motor. Flow. Meas. Inst. 100, 102720. https://doi.org/10.1016/j.flowmeasinst.2024.102720 (2024).
Li, D., Liu, Y., Gong, J. & Wang, T. Design of a noncircular planetary gear mechanism for hydraulic motor. Mat. Prob Eng. 2021, 5510521. https://doi.org/10.1155/2021/5510521 (2021).
Zhang, B., Song, S., Jing, C. & Xiang, D. Displacement prediction and optimization of a non-circular planetary gear hydraulic motor. Adv. Mech. Eng. https://doi.org/10.1177/16878140211062690 (2021).
Wang, K., Gao, Z., Chen, G. & Guo, M. Tooth profile construction and experimental verification of non-circular gear based on double Arc active design. Appl. Sci. 13, 10566. https://doi.org/10.3390/app131910566 (2023).
Sliwinski, P. Mechanizm satelitowy Hydraulicznej Maszyny Wyporowej (Satellite operating mechanism of a hydraulic displacement machine). Patent application P.445213. https://ewyszukiwarka.pue.uprp.gov.pl/search/pwp-details/P.445213 (2023).
Oshima, S. & Hiranao, T. Investigation for output torque of a low pressure water hydraulic planetary gear motor. Ventil 18(1), http://www.dlib.si/?URN=URN:NBN:SI:doc-0500MONK (2012).
Oshima, S., Hirano, T., Miyakawa, S. & Ohbayashi, Y. Study on the output torque of a water hydraulic planetary gear motor. In Proceeding of The Twelfth Scandinavian International Conference on Fluid Power SICFP’11, Tampere, Finland. https://trepo.tuni.fi//handle/10024/116713 (2011).
Oshima, S., Hirano, T., Miyakawa, S. & Ohbayashi, Y. Development of a rotary type water hydraulic pressure intensifier. Int. J. Fluid Power Sys. https://doi.org/10.5739/jfpsij.2.21 (2009).
Liu, Y., Ren, X. & Dong, C. Transmission performance analysis of non-circular gear hydraulic motor. Jor J. Mech. Ind. Eng. https://doi.org/10.59038/jjmie/180316 (2024).
Sliwinski, P. Determination of the theoretical and actual working volume of a hydraulic motor – Part II (The method based on the characteristics of effective absorbency of the motor). Energies 14(6), 1648. https://doi.org/10.3390/en14061648 (2021).
Sliwinski, P. Geometric working volume of a satellite positive displacement machine. Sci. Rep. 14, 11195. https://doi.org/10.1038/s41598-024-61773-1 (2024).
Sliwinski, P. The basics of design and experimental tests of the commutation unit of a hydraulic satellite motor. Arch. Civ. Mech. Eng. https://doi.org/10.1016/j.acme.2016.04.003 (2016).
Smirnov, V. & Volkov, G. Computation and structural methods to expand feed channels in planetary hydraulic machines. IOP Conf. Series: J. Phys. https://doi.org/10.1088/1742-6596/1210/1/012131 (2019).
Sieniawski, D. Pompa obiegowa (Circulating pump). Master thesis. (Gdansk University of Technology, 1984).
Ding, H. Application of non-circular planetary gear mechanism in the gear pump. Adv. Mat. Res. https://doi.org/10.4028/www.scientific.net/AMR.591-593.2139 (2012).
Luan, Z. & Ding, M. Research on non-circular planetary gear pump. Adv. Mat. Res. https://doi.org/10.4028/www.scientific.net/AMR.339.140 (2011).
Osiecki, L. Rozwój konstrukcji pomp satelitowych (eng. Development of satellite pump structures). Nap. i Ster. 12. http://nis.com.pl/userfiles/editor/nauka/122018_n/Osiecki.pdf (2018).
Osiecki, L. New generation of the satellite hydraulic pumps. J. Mech. Energy Eng. https://doi.org/10.30464/jmee.2019.3.4.309 (2019).
Sliwinski, P. Pompa satelitowa (Satellite pump). Patent PL 244928. https://ewyszukiwarka.pue.uprp.gov.pl/search/pwp-details/P.439702 (2024).
Sliwinski, P. Influence of geometrical and operational parameters on tooth wear in the working mechanism of a satellite motor. Sci. Rep. 13, 17028 (2023). https://www.nature.com/articles/s41598-023-44319-9
Sliwinski, P. Influence of operating pressure on the durability of a satellite hydraulic motor supplied by rapeseed oil. Sci. Rep. 14, 10441. https://doi.org/10.1038/s41598-024-61072-9 (2024).
Cao, W., Liu, Y., Niu, Z. & Wang, L. Leakage characteristics analysis of an end face clearance compensated non-circular planetary gear motor. In IEEE 8th International Conference on Fluid Power and Mechatronics (FPM), Wuhan, China. https://ieeexplore.ieee.org/document/9035879/metrics#metricshttps://doi.org/10.1109/FPM45753.2019.9035879 (2019).
Sliwinski, P. The influence of water and mineral oil on volumetric losses in a hydraulic motor. Pol. Mar. Res. https://doi.org/10.1515/pomr-2017-0041 (2017).
Sliwinski, P. The influence of water and mineral oil on volumetric losses in the displacement pump for offshore and marine applications. Pol. Mar. Res. https://doi.org/10.2478/pomr-2019-0037 (2019).
Sliwinski, P. The influence of water and mineral oil on mechanical losses in the displacement pump for offshore and marine applications. Pol. Mar. Res. https://doi.org/10.2478/pomr-2018-0040 (2018).
Sliwinski, P. The influence of water and mineral oil on mechanical losses in a hydraulic motor for offshore and marine applications. Pol. Mar. Res. https://doi.org/10.2478/pomr-2020-0034 (2020).
Sliwinski, P. & Patrosz, P. Methods of determining pressure drop in internal channels of a hydraulic motor. Energies. https://doi.org/10.3390/en14185669 (2021).
Kujawski, M. Pulsacja Chłonności i Momentu Obrotowego Obiegowych Silników Hydraulicznych. Maszyny Górnicze 3(53). (1995).
Kujawski, M. Ustalenie Ogólnych Równań i Algorytmu Ich Rozwiązywania W Celu Wyznaczenia Chłonności Właściwej Obiegowych Silników Hydraulicznych (eng. Determine the general equations and their solution algorithm for determining the specific absorption of Circulating hydraulic motors). Maszyny Górnicze 70 (1997).
Kujawski, M. Metody Wyznaczania Głównych parametrów Eksploatacyjnych Obiegowych Silników Hydraulicznych Z Nieokrągłymi Kołami zębatymi (eng. Methods for determining the main operating parameters of Circulating hydraulic motors with non-circular gears). Hyd Pneum 1 (1996).
Drogosz, P. Teoretyczne badanie chłonności obiegowych silników hydraulicznych (eng. Theoretical study of the absorption of circulating hydraulic motors.). Ph.D. dissertation. (Poznan University of Technology, 2001).
Kujawski, M. Analiza kinetostatyczna Obiegowych Silników Hydraulicznych Z Nieokrągłymi Kołami zębatymi. Maszyny Górnicze 5(59) (1996).
Author information
Authors and Affiliations
Contributions
The manuscript was written entirely by the author.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Sliwinski, P. Theoretical background of the operating parameters of the satellite working mechanism of the hydraulic positive displacement machine. Sci Rep 15, 12593 (2025). https://doi.org/10.1038/s41598-025-96889-5
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-96889-5
Keywords
This article is cited by
-
Theoretical background of the satellite digital hydraulic machine
Archives of Civil and Mechanical Engineering (2026)
