
Abstract
To address the challenge of acoustic wave attenuation in traditional Micro-Electro-Mechanical Systems (MEMS) vector hydrophone packaging, this study proposes a sound-focusing package with tapered apertures (TA) and a nylon sound-focusing cap (NSC). Theoretical analysis and COMSOL simulations reveal that the tapered geometry (wider external and narrower internal apertures) concentrates acoustic energy, enhancing particle acceleration at sensitive elements. Experimental results show that the NSC achieves a sensitivity of −186.4 dB at 100 Hz, representing improvements of 7.9 dB and 6.1 dB compared with the steel mesh sound-transmitting cap (SMC) and non-encapsulated bare cilia (NC), respectively. The directivity null depth of the NSC-encapsulated hydrophone reaches 40.98 dB at 315 Hz, outperforming SMC and NC by 7.35 dB and 5.49 dB. The low Young’s modulus and density of nylon ensure a natural frequency in water (942.07 Hz) that exceeds the operating band (20–500 Hz), avoiding structural resonance and ensuring high signal-to-noise ratio output. The sound-focusing design, validated by standing wave tube tests, provides an effective solution for high-sensitivity and high-directivity underwater acoustic detection.
Index Terms—MEMS vector hydrophone, sound-focusing package, tapered aperture, bionic cilia, sensitivity, directivity, low-frequency acoustic detection, nylon material.
Similar content being viewed by others

Introduction
Acoustic waves are the primary information carriers in the ocean, and many countries are increasingly focusing on maritime research1,2,3. As a key device for underwater acoustic detection, vector hydrophones offer higher target detection accuracy than scalar hydrophones4,5. However, their practical application faces challenges due to underdeveloped packaging technologies6,7, as hydrophone performance heavily depends on packaging. Thus, developing new packaging structures to enhance sensitivity within the operating frequency band has become a research priority8,9,10.
In complex marine environments, reliable packaging is critical for hydrophones. Asadnia et al.11 developed a piezoelectric sensor with PDMS spin-coating and composite polymer filling for underwater operation. Shapero et al.8 used polystyrene-silicone oil packaging: silicone oil protects sensors from corrosion, while parylene prevents contamination. Gembaczka et al.12 coated Micro-Electro-Mechanical Systems (MEMS) pressure sensors with polyimide epoxy composites and ALD-deposited Al2O3/Ta2O5 layers to avoid liquid contact and extend lifespan. Xue et al.13 designed a fish lateral-line-inspired MEMS vector hydrophone, using polyurethane sound-transparent caps for insulation and castor oil for acoustic conduction, with four-beam structures and biomimetic cilia for signal monitoring.
Chen et al.14 proposed a “steel mesh structure” with stronger pressure resistance: a parylene film isolates the sensor from water, and the steel mesh sound-transmitting cap (SMC) enables sound passage via uniform through-holes, achieving sensitivity nearly matching non-encapsulated bare cilia (NC). However, the SMC still hinders sound wave propagation.
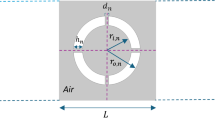
To address sound wave attenuation caused by the sound-transmitting cap, this study proposes a sound-focusing package for enhancing MEMS vector hydrophone performance. The package involves depositing a parylene film on the hydrophone’s sensitive elements (Fig. 1a) and surrounding them with a rigid sound-focusing cap (SC) featuring uniformly arranged tapered apertures (TA) that are wider externally and narrower internally (Fig. 1b). As sound waves pass through the TA, their reduced cross-sectional area concentrates acoustic energy onto the bionic cilia.

Sensitive elements and sound-focusing cap of Micro-Electro-Mechanical Systems (MEMS) vector hydrophone. a The structure of the sensitive elements; b Sound-focusing cap and tapered apertures, with the input cross-sectional area of tapered apertures being A₀ and the output cross-sectional area being A₁
Materials and methods
Ship radiated noise, a major component of ocean ambient noise, mainly lies in the 20–500 Hz band15,16,17. Sound-focusing package studies are conducted within this range.
Theoretical analysis
In the design of the SC, the primary consideration is which physical quantities of acoustic waves affect the hydrophone sensitivity. As shown in Fig. 1a, MEMS vector hydrophone sensors use cilia to sense sound. When sound waves act on the bionic cilia, a sound pressure difference exists on both sides of the cilia along the direction of sound wave propagation, causing the cilia to deflect. Deflection induces stress variation in the cross beam, where the normal stress distribution at a distance x from the root on the cross beam is composed of the superposition of two parts: the first part is bending stress, and the second part is axial compressive stress10.
In the formula, μ is the Poisson’s ratio of the cross beam, β is the torsion coefficient, x1 is the distance from the cross beam root, l is the length of the cross beam, b is the width of the cross beam, t is the thickness of the cross beam and mass block, w is the side length of the mass block, h is the height of the cilia, and d is the radius of the cilia.
This deflection induces a change in the resistance of the piezoresistors on the cross beam. For the piezoresistors on a single cross beam at distances a and b from the root, by introducing a dimensionless coefficient τ, the resistance values change with stress as \([R+\tau {\sigma }_{1}(a)]\) and \([R+\tau {\sigma }_{1}(b)]\). This is converted into a variation in the output voltage via a Wheatstone bridge:
Since \([\tau {\sigma }_{1}(a)-\tau {\sigma }_{1}(b)]\) is much smaller than R, the voltage variation can be expressed as:
Analysis indicates that the output voltage exhibits a linear correlation with the sound pressure difference, which directly dictates the magnitude of the output voltage. Therefore, the key to optimizing the sound focusing performance of the SC lies in increasing the sound pressure gradient \(\nabla P\) at the sensitive element:
As shown in Fig. 1b, the SC structure adopts a compression energy-focusing mechanism: acoustic waves are picked up through the large-diameter port of the TA, and acoustic wave compression is achieved by virtue of its tapered cross-sectional structure. Based on Huygens’ principle, any point on the wavefront can be regarded as a point source emitting sub-waves, and these sub-waves form a new wavefront during propagation. When the sub-waves emitted by each point on the wavefront at the large-diameter port propagate toward the inner narrow port, due to the gradual contraction of the aperture cross-sectional area, the sub-wave envelope undergoes forced reconstruction at the narrow port—edge sub-waves change their propagation paths under the constraint of the aperture boundary, while central sub-waves keep advancing forward, eventually causing the wavefront to bend inward and converge at the small-diameter port. This wavefront reconstruction process essentially involves spatial constraint and compression of divergent acoustic wave energy, promoting the superposition and convergence of energy from multiple sub-wave sources in the narrow port region, and finally directionally releasing the energy into the interior of the SC through the small-diameter port.
In acoustic theory, a traveling wave refers to a wave propagating unidirectionally. In a plane wave sound field, the sound pressure at any position x can be expressed as18:
Particle velocity is:
Equations (5) and (6) show that sound pressure and particle velocity share the same waveform in a plane wave field. For any point x in this field, the sound pressure gradient is expressed as:
here pa is the source sound pressure, c is the speed of sound, and \(\frac{\partial V(x,t)}{\partial t}\) is particle acceleration v̇.
From Eqs. (5) and (6), the sound pressure-to-particle velocity ratio in plane waves depends only on medium intrinsic parameters ρ0c and is constant. Equation (7) shows that the pressure gradient-to-acceleration ratio is also constant. Both ratios follow the same frequency trend. This study uses particle acceleration simulation to replace pressure gradient analysis.
In the 20–500 Hz operating range, half-wavelengths exceed 1.4 m. When the SC is small (diameter <100 mm), TA length is negligible compared to the half-wavelength, satisfying lumped parameter model criteria19. Thus, the periodic acoustic vibrations within the TA can be decomposed into transient fluid motion snapshots over time. Thus, the continuity equation can be introduced:
In the equation, A0 and A1 denote the input and output cross-sectional areas, respectively; v0 and v1 are the particle velocities corresponding to the input and output ends.
It can be known from Eq. (8) that the particle velocity at the output end of the TA is:
Given the coupling relationship between particle acceleration and sound pressure gradient, it can be known from Eq. (9) that the TA can significantly increase the amplitude of the sound pressure gradient, where the ratio of A0 to A1 determines the sound-focusing performance, achieving a gain effect of acoustic energy rather than dissipative attenuation, thereby enhancing the hydrophone sensitivity. Since the sound pressure gradient at the sensitive element is affected by the coupling effect of multiple TAs, forming a complex physical model, subsequent systematic research will be carried out through numerical simulation methods (the SC inner diameter is set to 16 mm by balancing manufacturing precision and overall hydrophone portability).
Simulation analysis
(Unless otherwise specified, all length units below are in mm)
Simulation analysis of the TA structure and SC material was conducted using COMSOL, with detailed modeling shown in Fig. 2a.

Simulation model of the sound-focusing cap and tapered apertures, and the 3-D line used for data analysis on the tapered apertures. a Simulation model of the sound-focusing cap and tapered apertures; b 3-D line schematic diagram
Analysis of the effect of TA structure on sound-focusing
To analyze the effect of TA-focused sound waves on bionic cilia, three key points were selected: input port A (0,0, L/2) mm, outlet port B (0,0,-L/2) mm, and bionic cilia location C (0,0,-L/2-8) mm. A 3D line connecting these points was defined to analyze particle acceleration along it, as shown in Fig. 2b.
As shown in Fig. 3a, a 20–500 Hz sweep showed consistent particle acceleration trends with frequency, so 315 Hz simulations were analyzed. With fixed input port radius (R1), Fig. 3b shows that for TA length (L) in the range of 10–22 mm, point B’s acceleration trends match as outlet port radius (R2) changes L = 10 mm results were selected. Figure 3c shows that acceleration along the A-B 3-D line (L1=input port propagation distance) increases with smaller cross-sections; smaller R2 boosts acceleration growth rate over the same L1. Outlet/input acceleration ratios in Fig. 3d and e correlate linearly with outlet port area, matching Eq. (9).

The effect of the tapered apertures (TA) structure on particle acceleration with the input port radius (R1) kept constant. a The variation trend of particle acceleration at 20, 63, 125, 250, 315, and 500 Hz; b Particle acceleration at the output port of TA under different lengths (L) and output port radii (R2); c Distribution of particle acceleration along the A-B 3D line under different R₂ conditions; d Particle acceleration at the input end and output end under different R₂ conditions; e The relationship between the ratio of output to input particle acceleration and the ratio of input to output cross-sectional area; f Particle acceleration at bionic cilia of TA under different L and R2; g Comparison of the effects of L and perforation rate on particle acceleration at bionic cilia
When sound waves leave point B, particle acceleration sharply decays. Particle acceleration at point C for TA structures with different L and R₂ parameters is shown in Fig. 3f, peaking at C when R₂ = 0.5 mm and L = 10 mm. Notably, point C’s particle acceleration is determined not by a single TA alone but rather by the combined effect of the entire SC output—correlating with both the particle acceleration at the TA outlet and the perforation rate of TAs on the SC. As Fig. 3g shows, the influence of L on particle acceleration is negligible compared with the perforation rate. Thus, the TA geometry is set as: R1 = 2 mm, R2 = 0.5 mm, L = 22 mm. While L should be maximized for optimal performance, it must also balance the hydrophone’s portability.
Comparative analysis of different materials for SC
Using steel, aluminum, and nylon, three sound-focusing cap configurations were developed: steel sound-focusing cap (SSC), aluminum sound-focusing cap (ASC), and nylon sound-focusing cap (NSC). Table 1 lists the performance parameters of the three materials.
In order to meet the operational requirements of the hydrophone within the 20–500 Hz range, the natural frequencies of three different materials of SC in air and water were analyzed. Results are shown in Fig. 4a–f. The natural frequencies of SSC, ASC, and NSC in air are 6796.4 Hz, 6357.4 Hz, and 1712.5 Hz, respectively, and those in water are 5733.2 Hz, 4520.4 Hz, and 942.07 Hz, respectively. The natural frequency of NSC in water is above 500 Hz, meeting the frequency band requirements of the hydrophone.

Comparative simulation of three sound-focusing cap materials. a Natural frequency of steel in air; b Natural frequency of aluminum in air; c Natural frequency of nylon in air; d Natural frequency of steel in water; e Natural frequency of aluminum in water; f Natural frequency of nylon in water; g 2-D plan view of the model. h Particle acceleration on a 3-D line
Particle acceleration trends are consistent within the 20–500 Hz range, so the focus is on 315 Hz. Figure 4g shows the 2-D plan view of the SC; the red line marks an internal-to-external path. Figure 4h plots 3-D line particle acceleration, with the x-axis representing z-axis data and the y-axis representing acceleration. Since COMSOL cannot extract solid-domain particle acceleration, 3-D segment data for the 26–48 mm range is missing. Figure 4h indicates that all materials exhibit identical trends: values inside the cap exceed those outside, and the acceleration of nylon is significantly higher than that of steel and aluminum, which indicates better sound transmission and sensitivity. As the NSC bandwidth meets the 20–500 Hz requirements of hydrophones, nylon is chosen for the SC.
In conclusion, the NSC offers an operational bandwidth that meets the hydrophone’s requirements within the 20–500 Hz range. Moreover, its particle acceleration is higher than that of the other two materials, indicating superior sensitivity. Therefore, this study selects nylon as the package material.
Comparative analysis of NSC and SMC
The SMC model is shown in Fig. 5a. To simulate directivity, the bio-inspired cilia structure was positioned at the center of both structures as depicted in Fig. 5b. Results in Fig. 5c and d present the directivity patterns of sound pressure signals output by the bio-inspired cilia structure after a sound source circumambulates NSC and SMC. These plots reveal that the concave depth of NSC exceeds that of SMC. Figure 5e displays a 2D planar view of the SMC model, where a red line represents a 3D path extending from the interior of the encapsulation to an external point. A comparison in Fig. 5e of particle accelerations along the 3D line in Fig. 5c and the 3D line in Fig. 4g at 315 Hz shows that particle acceleration inside NSC is greater than both its external acceleration and the acceleration inside SMC. These results indicate that NSC promotes sound transmission and exhibits superior acoustic performance compared to SMC. Figure 5g shows the simulated sensitivity of the sensitive element in the NSC; the simulation curve increases at a rate of 6 dB per octave, which is consistent with the actual law.

Comparative Simulation of nylon sound-focusing cap (NSC) and steel mesh sound-transmitting cap (SMC). a Structural schematic of SMC; b The position of bionic cilia in NSC and SMC; c Directivity comparison of SMC; d Directivity comparison of NSC; e 2-D plan view of SMC; f Particle acceleration comparison; g The simulated sensitivity diagram obtained by placing the sensitive element inside the NSC
Results
Fabrication
The NSC prototype is shown in Fig. 6a, fabricated via 3D printing. Key components of the MEMS hydrophone are its sensitive structures (cross beams and cilia), as depicted in Fig. 6b. Cross beams are manufactured using MEMS processes including ion implantation, ohmic contact formation, backside/frontside silicon etching10, with scanning electron microscope images shown in Fig. 6c. Completed chips are mounted on PCBs and connected via gold wire bonding. During secondary integration, cilia are directly 3D-printed onto chip masses using a micro-precision printer (BMF nanoArch S140 Pro, Fig. 6d, 10 μm resolution) based on projection micro-stereolithography. To ensure consistent testing conditions, the same hydrophone was tested with NSC, NC, and SMC encapsulations, as shown in Fig. 6f.

Fabrication of Micro-Electro-Mechanical Systems (MEMS) Vector Hydrophone with Sound-focusing Package. a 3D-printed nylon sound-focusing cap (NSC); b MEMS vector hydrophone sensitive elements; c Scanning electron microscope image of the cross beam; d BMF nanoArch S140 Pro; e Sensitive elements of MEMS vector hydrophone combined with cilia; f Hydrophone prototypes with three different encapsulations
Measurement
The performance testing of vector hydrophones primarily involves sensitivity and directivity tests, which are conducted using a standing wave tube calibration system. The schematic diagram and physical prototype of the standing wave tube test system are shown in Fig. 7a and b. During testing, the hydrophone under test is placed at the center of a rotational device and synchronized with a standard hydrophone to submerge to the same depth in water. A sinusoidal signal generated by a signal generator is amplified by a power amplifier to drive a piezoelectric transducer, forming a stable standing wave field within the waveguide. The received acoustic signal is amplified and filtered before being displayed on an oscilloscope. The vector hydrophone is calibrated using the free-field sensitivity comparison method: its sensitivity is calculated based on the known sensitivity of the standard hydrophone and the output voltages of both hydrophones, as described by the following equation:

Measurement results. a Schematic of the test system; b Vector hydrophone calibration system; c The testing process of sound-focusing cap (NSC), non-encapsulated bare cilia (NC) and steel mesh sound-transmitting cap (SMC); d Sensitivity comparison chart; e Comparison of simulation and test; f The directivity of the NSC hydrophone; g The directivity of the NC hydrophone; h The directivity of the SMC hydrophone
In the equation: M₀ denotes the standard hydrophone sensitivity; Uₓ and U₀ are the output voltages of the test and standard hydrophones, respectively; k is the wave number; d and d₀ represent the distances from the liquid surface for the test and standard hydrophones, respectively.
The sensitivity tests for NSC, NC, and SMC are shown in Fig. 7c, with calibration results in Fig. 7d. At 100 Hz, their sensitivities are: NSC −186.4 dB, NC −192.5 dB, and SMC −194.3 dB. Unlike traditional packages, the acoustic focusing design does not attenuate sound but instead enhances it, concentrating acoustic energy onto bionic cilia through effective focusing. Figure 7e shows that the measured data of the NSC increases at a rate close to 6 dB per octave, which is highly consistent with the simulation trend. Moreover, the deviation between the measured values and simulated values at each frequency point is controlled within 2 dB, and the measured and simulated sensitivity curves are in high agreement (Reference sensitivity is defined as “0 dB = 1 m s⁻²/Pa”). Testing indicates NSC achieves the highest sensitivity in the 20–500 Hz band, with an operational bandwidth of 10–630 Hz, fully meeting hydrophone requirements.
Directivity represents a vector hydrophone’s ability to detect targets in different directions. During testing, the hydrophone is mounted on a rotational device, rotated continuously, and data are recorded by the system. The directivity calculation equation is as follows:
In the equation, Uθ is the output voltage of the hydrophone under test at any rotation angle, and Umax is its maximum output voltage. Processed data are plotted on a polar coordinate system to obtain the vector hydrophone’s directivity pattern. Figure 7f–h shows directivity patterns of NSC, NC, and SMC at 315 Hz, with corresponding null depths of 40.98 dB, 35.49 dB, and 33.63 dB, indicating that the acoustic focusing package enhances target localization performance.
Discussion and conclusions
This study achieves high-sensitivity acoustic signal reception and precise target localization for MEMS vector hydrophones in complex marine environments through optimized design of the SC and TA structure. Based on the acoustic propagation theory and lumped parameter model, a cross-sectional area contraction model (Eq. (9)) is established to systematically analyze the influence of TA geometric parameters on particle acceleration. COMSOL simulations verify the acoustic energy convergence effect of the tapered structure: when the ratio of the TA input cross-sectional area A0 to the output cross-sectional area A1 increases, the particle acceleration on the surface of sensitive elements significantly improves, providing a quantitative basis for structural parameter optimization. The sensitivity of the NSC reaches −186.4 dB at 100 Hz, representing improvements of 7.9 dB and 6.1 dB compared with the SMC and NC, respectively. This performance enhancement originates from the synergistic effect of the geometric focusing of TA and the low-impedance properties of the nylon material, avoiding signal attenuation caused by traditional packaging.
Directivity tests further demonstrate that the NSC-encapsulated hydrophone exhibits excellent azimuthal resolution within the operating frequency band, with a null depth of 40.98 dB, representing gains of 7.35 dB and 5.49 dB compared to SMC and NC, respectively—and its directivity pattern closely approximates an ideal cosine distribution. This improvement is attributed to the directional modulation of sound waves by the sound-focusing cap: uniformly distributed TA concentrate axial acoustic energy while effectively suppressing non-axial noise interference, making the deflection response of bionic cilia more directional. The natural frequency of the nylon material in water (942.07 Hz) is far higher than the hydrophone’s operating band (20–500 Hz), avoiding structural resonance-induced noise superposition on acoustic signals and ensuring high signal-to-noise ratio output. Test results are in high agreement with theoretical models and simulation analyses, validating the effectiveness and advancement of the sound-focusing packaging structure in enhancing sensitivity and directivity.
References
Zhang, X. B., Sun, H. X. & Kaneko, A. Editorial: ocean observation based on underwater acoustic technology. Front. Mar. Sci. 10, 1212840 (2023).
Lloyd’s Register Foundation & Economist Impact. Global maritime trends 2050. Report (Lloyd’s Register Foundation, 2023). https://doi.org/10.60743/XRTA-Z334
Koehl, M. A. R. A life outside. Annu. Rev. Mar. Sci. 16, 1–23 (2024).
McConnell, J. A. Analysis of a compliantly suspended acoustic velocity sensor. J. Acoust. Soc. Am. 113, 1395–1405 (2003).
Wang, R. X. et al. A ‘fitness-wheel-shaped’ MEMS vector hydrophone for 3D spatial acoustic orientation. J. Micromech. Microeng. 27, 045015 (2017).
Liu, Y. et al. “Lollipop-shaped” high-sensitivity Microelectromechanical Systems vector hydrophone based on Parylene encapsulation. J. Appl. Phys. 118, 044501 (2015).
Liu, L. X., Zhang, W. D., Zhang, G. J. & Xue, C. Y. Package optimization of the cilium-type MEMS bionic vector hydrophone. IEEE Sens. J. 14, 1185–1192 (2014).
Shapero, A. M., Liu, Y. & Tai, Y. C. Parylene-on-oil packaging for long-term implantable pressure sensors. Biomed. Microdevices 18, 66 (2016).
Sebastian, S., Prasad, P. S., Michael, K., Avvaru, S. & Asokan, S. Validation of packaged clad-etched fiber Bragg grating as underwater acoustic sensor. IEEE Sens. J. 23, 2137–2144 (2023).
Wang, R. X. et al. Design and implementation of a jellyfish otolith-inspired MEMS vector hydrophone for low-frequency detection. Microsyst. Nanoeng. 7, 1 (2021).
Asadnia, M., Kottapalli, A. G. P., Shen, Z. Y., Miao, J. M. & Triantafyllou, M. Flexible and surface-mountable piezoelectric sensor arrays for underwater sensing in marine vehicles. IEEE Sens. J. 13, 3918–3925 (2013).
Gembaczka, P. et al. Encapsulation of implantable integrated MEMS pressure sensors using polyimide epoxy composite and atomic layer deposition. J. Sens. Sensor Syst. 3, 335–347 (2014).
Liu, M., Zhang, G. J., Song, X. P., Liu, Y. & Zhang, W. D. Design of the monolithic integrated array MEMS hydrophone. IEEE Sens. J. 16, 989–995 (2016).
Chen, P. et al. Design of ciliated MEMS vector hydrophone based on stainless steel mesh cap. Measurement 187, 110367 (2022).
McKenna, M. F., Ross, D., Wiggins, S. M. & Hildebrand, J. A. Underwater radiated noise from modern commercial ships. J. Acoust. Soc. Am. 131, 92–103 (2012).
Farcas, A., Powell, C. F., Brookes, K. L. & Merchant, N. D. Validated shipping noise maps of the Northeast Atlantic. Sci. Total Environ. 735, 139509 (2020).
Liu, Y. et al. Design and algorithm integration of high-precision adaptive underwater detection system based on MEMS vector hydrophone. Micromachines 15, 514 (2024).
Yang, D. S., Gordienko, V. A. & Hong, L. J. Underwater Vector Sound Field Theory and Its Applications (Science Press, Beijing, 2013).
Kinsler, L. E., Frey, A. R., Coppens, A. B. & Sanders, J. V. Fundamentals of Acoustics 4th edn (Wiley, Hoboken, 2000).
Acknowledgements
This work was supported by 1331KSC, State Key Laboratory of Precision Measuring Technology and Instruments (pilab1805).
Author information
Authors and Affiliations
Contributions
Z.Y.C. and G.J.Z. proposed the idea for the study. Z.Y.C. and Z.Y.B. conducted simulations. Z.Y.C. and H. Z. fabricated the sensors and performed the testing. Z.Y.C. and R.X.W. established the theoretical models. Z.Y.C. wrote the manuscript. Z.Y.C. and W.D.Z. provided advice on fabrication and measurement. Z.Y.C. and H.R.L. conducted theoretical discussions. All the authors discussed the results and the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Cheng, Z., Zhang, G., Bai, Z. et al. Sound-focusing package for MEMS vector hydrophone. Microsyst Nanoeng 12, 111 (2026). https://doi.org/10.1038/s41378-025-01112-0
Received:
Revised:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41378-025-01112-0
