
Abstract
In nature, insects can swiftly move and actively morph to adapt to complex and varied conditions. However, replicating this capability in insect-scale robots requires sophisticated structural designs, which are difficult to achieve at such a small scale without fundamental hardware innovations. This work proposes a coupling mechanism between actuation and morphing by combining an arc-heating actuator and shape memory alloy wires, presenting a fast insect-scale robot (83.4 body lengths per second) capable of active morphing and self-recovery. The arc-heating actuator is designed to provide the kinetic energy and the thermal energy essential for deforming the wires. The robot can compress its body thickness to traverse through a gap of 70% its height smoothly within 2.2 seconds and is amphibious. Furthermore, after enduring pressure 5 million times its weight, the robot is flattened, but fully recovers its original size and performance in just a few seconds.
Similar content being viewed by others


Introduction
Insect-scale robots have the potential for disaster relief, exploration, and the deployment of sensors within confined spaces due to their small size advantages1,2,3,4,5,6,7,8,9,10,11,12. These application scenarios frequently present a range of unanticipated events and diverse environmental conditions, such as exogenous damages due to secondary hazards, waterlogged obstacles, and confined spaces. Therefore, micro-robots need active morphing capabilities for various environments. However, most current deformable robots contain complex structures that are difficult to miniaturize due to size effects and degrade in performance when scaled down, making it particularly challenging to achieve insect-scale deformation, leading to limitations in operational scenarios13,14. Natural organisms adapt to varying environments by changing their morphology and posture. For instance, cockroaches demonstrate a remarkable active-morphing ability to navigate confined spaces by compressing their bodies when encountering narrow crevices15. Dune spiders (Carparachne aureoflava) protect themselves by transforming into wheels, allowing them to roll quickly away from predators16. Inspired by insects that can actively morph, we recognize the need to develop the morphing capabilities of insect robots.
Numerous relatively larger robots and structures have achieved active morphing capabilities. For example, robots utilizing origami technology17,18,19,20,21,22,23,24,25 can transform into a finite set of shapes. Robots constructed with novel materials, such as hydrogel, dielectric elastomer (DE), and liquid crystal elastomer (LCE), can undergo continuous shape alteration in response to external stimuli26,27,28,29. Pneumatic robots30,31,32,33,34,35,36,37 achieve deformation through air pressure from distinct chambers. Some robots achieve multiple modes using structural design and mechanical actuation systems to enable body transformations or different motion strategies38,39,40,41,42,43,44,45,46. However, these morphing capabilities often rely on complex mechanical structures like linkages and reducers, and control systems such as sensor-dependent feedback control, making it difficult to further reduce the size and increase the speed of these robots. These robots are unsuitable for micro-robots with strict space and have weight constraints thus limiting the practicality of robots in multi-task scenarios. Developing an insect-scale robot with active morphing and high-speed locomotion is essential for adapting to diverse environments and improving task performance.
To address this issue, we introduce a class of fast-moving insect-scale crawling robots that leverage the principle of heating air with arc discharge and the memory effect of shape memory alloys (SMA). This approach enables fast movement (83.4 body lengths per second, BL/s) and controllable shape alteration, allowing the robot to adapt to diverse conditions and recover from damage. For example, our robots can alter their body thickness to navigate through narrow gaps, mimicking the natural behavior of cockroaches. These robots also possess self-recovery abilities, enabling them to maintain full locomotor functionality despite damage. Furthermore, they can also modify their shape to transition from terrestrial to aquatic mode in aquatic settings.
Result
Robot design and active-morphing operation
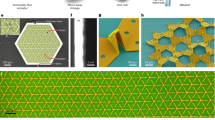
The robot, with a length of 5 mm and a weight of 10 mg (Supplementary Table 1), is shown in Fig. 1A. The primary components of the robot include an arc-heating (AH) actuator, which serves as the torso, NiTi SMA wires functioning as the exoskeleton, and four legs (Fig.1B). The AH actuator features a piston structure comprised of two chambers and a set of electrodes. As shown in Fig. 1C, when a high voltage is applied across these electrodes, an arc discharge occurs, converting electrical energy into thermal energy. The chambers transform thermal energy into kinetic energy, propelling the robot rapidly at 83.4 BL/s, making it one of the fastest insect robots. Meanwhile, the SMA wires convert thermal energy into strain energy (Fig. 1D), allowing the robot to reduce its thickness by 1/3 and squeeze into a narrow crevice within 2.2 s, much like a real cockroach (Fig. 1E, F). The discharge between electrodes resembles a quasi-explosive process, offering high energy density and enhancing the robot’s speed.

A Optical image of a prototype robot alongside a US quarter coin. B Structural schematic of the prototype robot, primarily comprising four legs made of superelastic wires, inner and outer chambers and springs constructed from polyimide film, and NiTi SMA rings positioned centrally within the chambers. C Schematic of the AH actuation principle, illustrating a driving cycle composed of four key processes: discharge, releasing thermal energy, expansion, and restoration. D The active-morphing principle is driven by SMA wires, which utilize the shape memory effect to transition the robot from an arbitrary shape to a designed shape in a high-temperature environment generated by the actuator. E (i) Potential application scenarios for active-morphing robots in field exploration include mimicking cockroaches compressing their bodies to navigate narrow rock crevices. (ii) An optical image of a cockroach squeezing into a narrow crevice§. F (i) Optical image of our robot actively flattening to enter a crevice, with a height reduction ∆h of 1⁄3 h, achieved in just 2.2 s. (§ Images of cockroaches crawling into narrow crevices. Multi-bits/Getty Creative. https://www.vcg.com/creative-video/281698265. Accessed on September 5, 2024.) (ii) Optical images of the robots before and after flattening.
Traditional piston engines rely on an electric spark to ignite the fuel, resulting in combustion driving the piston. In contrast, the AH actuation mechanism directly utilizes the energy of the arc to generate motion. Since the energy output of the spark is inherently limited, the piston and spring system must be small enough for their mechanical energy to match the spark’s expansion energy. Therefore, the AH actuation mechanism is particularly suitable for millimeter-scale crawling robots, whose energy requirements align with the spark’s output. Unlike robots powered by explosions47,48 or combustion49,50,51,52,53,54, this design avoids the risks of fuel storage and transportation, reducing robot size while improving safety, stability, and moving speed.
The operating principle of the AH actuator involves the reciprocating motion of the piston, as illustrated in Fig. 1C. The piston’s structure consists of a pair of cylindrical chambers made from polyimide film, with annular SMA wires bonded at the center of both the inner and outer chambers. When a pulsed voltage at the kilovolt level is applied between the anode and cathode, the air between the electrodes becomes ionized, generating an electric arc and releasing substantial thermal energy. The heat generated by the arc depends upon the input pulse parameters, and the actuator temperature can be regulated by controlling the frequency and width of the pulse. This heat is absorbed by the air within the chamber, increasing its internal energy and causing the piston chambers to expand. As the piston’s internal volume increases, the internal energy decreases, reducing pressure within the piston. Simultaneously, the springs connected to the inner and outer chambers at both ends respectively restore the inner and outer chambers to their original states under the action of spring force, thus resetting the relative displacement to zero and completing the cycle. Although factors like piston shape and the fit between inner and outer chambers affect output, the AH actuator’s explosive characteristics provide enough force for rapid robot movement when the chambers move relative to each other. NiTi superelastic wires support the inner and outer chambers, functioning as front and rear legs, respectively, to provide asymmetric friction for movement. Previous research has demonstrated the performance of this driving principle and analyzed its operating characteristics55,56,57. In this study, we emphasized the innovations in our last works, particularly the proposed coupling mechanism between morphing and actuation, enabling more efficient locomotion. We have further innovated the materials and structural design of the actuator to exploit the thermal effects of this driving principle fully and explore the diverse potential configurations of the actuator.
We employ NiTi SMA wires to implement the robot’s shape morphing based on the AH actuator. Due to the polyimide film compliance, the chambers’ radial cross-sections conform to the shape of the SMA wires adhered in the center so that the shape of the SMA wires determines the shape of the actuator. SMA exhibits the shape memory effect (SME): when cooled below the Martensitic finish temperature (Mf), they consist of the martensitic phase and can be molded into arbitrary shapes under external force; upon heating above the Austenitic finish temperature (Af), they revert to their original shape by transitioning to the austenitic phase. This transformation process can be repeated multiple times with minimal performance deviation58,59. Due to its short response time, the AH actuator can swiftly return to its original shape when heated above the critical temperature (Af), even after experiencing undesired deformations such as those resulting from external impacts60. The schematic processes are illustrated in Fig. 1D. Additionally, the facile training procedure of SMA wires allows the actuator shape to be easily programmed to meet specific environmental and mission requirements by pre-training the shape of the SMA wires.
Finally, integrating the thermal effects of the AH actuator with the thermally responsive recovery properties of the SMA wires enables active control of the robot’s shape morphing, with the actuator serving as the core structure. The SMA wires are pre-conditioned to achieve the desired robot configuration for specific tasks. Specific electrical pulse parameters can be applied when shape morphing is required to raise the actuator’s temperature above the Af temperature, thereby inducing active deformation. For instance, in scenarios involving the traversal of narrow crevices or pipelines, the robot needs to further reduce its size. Figure 1E, F illustrates the robot’s active deformation process, mimicking cockroaches as they navigate through a narrow gap created by a glass plane lower than the robot’s nominal height. Here, we have trained the SMA into a flattened elliptical shape (Supplementary Fig. 10). The robot crawls forward through the open area, and when it needs to deform to enter a narrow gap, by increasing the input parameter of the electrical pulse, the robot flattens along with the SMA, reducing its overall height by ∆h to facilitate entry into narrow spaces. During testing, the robot was initially unable to enter the crevice. However, after actively deforming, it reduced its height by 33% and successfully entered the gap in just 2.2 s (Supplementary Movie 1).
Characterization of AH actuator
To demonstrate an arc’s thermal effects and ascertain the actuator’s optimal dimensions, we utilized COMSOL 6.0 to calculate the temperature distribution resulting from an arc breakdown upon applying a high voltage of 6500 V across electrodes separated by a 1.2 mm gap. As illustrated in Fig. 2A, a discharge breakdown occurred between the cathode and anode tips, with a maximum temperature of 538 K at the center, decreasing with distance. Considering the uniformity of the highest temperature zone and the ease of fabrication, a cylindrical region with a diameter of 3.5 mm and a height of 5 mm, centered around the arc area (as indicated by the dashed line in the axial section), was selected (Supplementary Fig. 17). The piston was subsequently designed based on this configuration. When tested with the same input parameters, the actuator region’s maximum temperature stabilized at 548 K during operation (Fig. 2B), which closely aligned with the simulation results, verifying the design’s validity.

A Simulated spatial temperature distribution during electrode discharge, calculated using COMSOL 6.0 with an electrode distance of 1.2 mm and a voltage of 6500 V. B Thermal infrared imaging of the actuator during operation, maintaining the same electrode distance and voltage as the simulation. The core temperature of the AH actuator reached 548 K, as measured using an infrared thermometer (FLUKE TIS60+). C Plot of experimental data on the relative amplitude of the actuator at different electrode distances and voltages. D Comparison of theoretical (thick dashed line) and experimental (thin gray line) results for actuator output displacement, with the thick solid line representing the average across multiple experiments. E Optical images capturing the robot’s crawling and forward movement (∆x) during one driving cycle, with operating conditions of 6500 V and a pulse width of 200 ns. F Sequence of recovery processes post-damage due to external force (F) during motion: initial velocity (v1), post-recovery velocity (v2), and recovery time (∆t). Includes optical images of the actuator recovering in 1.75 s after being crushed by a force equivalent to 20,000 times its weight (200 g). G Continued robot performance post-recovery from damage induced by a force 50,000 times its weight (500 g). H Recovery time as a function of input pulse frequency and width after a 500 g weight damages the robot. No recovery was observed at 50 Hz–100 ns input parameters, all tested at a voltage of 6500 V. The error bars indicate the standard deviation of three trials. I Recovery time and speed decay ratio post-damaged by varying weights (50 g, 500 g, 50 kg). The speed decay ratio is defined as the post-recovery speed relative to the pre-damage speed, measuring at a constant voltage of 6500 V. The error bars indicate the standard deviation of three trials.
Figure 2C illustrates the relationship between actuator amplitude and applied voltage across various electrode spacings. The actuator’s amplitude increases with both higher applied voltages and larger spacings. Combining a 1.2 mm gap and 6500 V yields the maximum amplitude. However, excessively expanding the distance between the electrodes while maintaining constant piston dimensions can result in unintended discharge locations, potentially compromising the actuator structure (as detailed in Supplementary Fig. 3). In conclusion, our results suggest that an electrode gap of 1.2 mm and an applied voltage of 6500 V constitute the optimal configuration for maximizing actuator output performance while ensuring structural integrity (Supplementary Fig. 15).
Based on the classical mass-spring model, the actuator’s motion is simplified to an undamped forced vibration. This is due to the negligible friction present, with the driving force modeled as a rectangular pulse. Figure 2D compares the experimental results and theoretical calculations of the actuator’s vibration over a single cycle under identical parameter settings. The experiment uses a pulsed electrical signal at t = 0. The thin gray line represents the outcomes of 30 experimental runs, the thick solid line represents the average of these trials, and the thick dashed line denotes the simulation results computed using MATLAB R2021a. The general trends of the simulation and experimental phenomena are similar, confirming the validity of the proposed model. The discrepancy is due to the undamped simulation model ignoring friction. Based on these models, the actuator’s efficiency is 29.14% (see Supplementary Text 1 for further details).
When designing a crawling robot based on actuators, the angle between the robot’s legs and the ground results in asymmetric friction between the front and rear legs during the relative motion of the inner and outer chambers; this asymmetry propels the robot forward by one amplitude distance per actuation cycle, assuming that the legs do not slip on the surface. Figure 2E presents optical images captured by a high-speed camera (FASTCAM Mini UX 100 type 200K-C-32 GB). The robot exhibits two gaits—crawling and bouncing—with its fundamental motion process remaining unchanged in both gaits (Supplementary Fig. 6). A pulse width below 300 ns leads to crawling, whereas above 400 ns results in bouncing. In practice, a critical point for gait transition exists between 300 ns and 400 ns, where the vertical component of the driving force offsets gravity.
Self-recovery performance
Due to the active-morphing ability, if the robot is damaged by an external force, resulting in undesired deformation, it will quickly restore to its original shape and continue on its way, as shown in Fig. 2F and Supplementary Movie 3. The lower section of the figure corresponds to an actual situation where an actuator, damaged by a 200 g weight, recovers quickly within 2 s. During motion, the robot recovered from an impact of 50,000 times its weight (500 g) and continued on its way, as shown in Fig. 2G. We further tested the robot’s self-recovering time versus frequency at different pulse widths, squeezed by the same weight (500 g), and the results are shown in Fig. 2H. Since the robot’s recovery and active morphing are based on the SMA wires absorbing the thermal energy released by the actuator, control of the robot’s shape-morphing process can be achieved. The larger the pulse width and frequency, the more energy is fed into the actuator per unit of time, and thus, the faster the robot recovers. When the pulse width is 100 ns, and the frequency is 50 Hz, the robot has not yet recovered because the operating temperature of the actuator is lower than the deformation temperature of the SMA wire due to the low input energy. Therefore, controlling these parameters can determine whether the robot will recover and regulate its recovery speed.
We tested the self-recovery performance of a robot to see if its performance decays after being damaged by an external force, and the results are shown in Fig. 2I. We measured the recovery time and speed decay ratio by applying three different masses—50 g, 500 g, and an adult weight of 52 kg (equivalent to 5000, 50,000, and 5 million times its weight, respectively). The recovery time is defined as the duration from the moment of impact to the point at which a steady crawl is re-established. The SMA will deform to varying degrees under different loads. The greater the deformation, the longer the recovery time required. The speed decay ratio is the ratio of the robot’s speed before the impact to its speed after recovery. The data show that the robot’s speed decay ratio under external force approximates a horizontal line at 1.0, indicating that it is fully capable of recovering from external impacts that far exceed its weight.
Locomotion performance
Utilizing the high frequency and high power of the AH actuator, we demonstrated the robot’s rapid movement capabilities. By adjusting the input parameters, we achieved two distinct gaits: crawling and bouncing. These gaits proved effective for traversing obstacles, navigating inclines, and moving across various surfaces. Transitions between crawling and bouncing can be achieved exclusively through modifications to input parameters without altering the robot’s structure. The robot exhibits a crawling gait when the pulse width is less than 300 ns, as the vertical component of the driving force is insufficient to overcome its weight. When the pulse width exceeds 400 ns, the increased vertical force surpasses gravity, causing the robot to transition to a bouncing gait (Supplementary Fig. 12). This allows for a convenient, precise, and rapid control process.
Figure 3A illustrates the relationship among relative speed, pulse width, and frequency for both gaits (Supplementary Movie 4). The pulse width determines the duration of a single arc discharge, directly affecting the extent of air heating and the driving force. At the same time, the frequency controls the number of driving events per unit time, influencing the total displacement output. By controlling frequency and pulse width, the robot’s speed can be adjusted from 4.6 BL/s to 83.4 BL/s. Experimental data indicate that the speed of the bouncing gait is significantly higher than that of crawling. In the crawling gait, there is sliding friction between the legs and the ground, whereas in the bouncing gait, the robot lifts off the ground, significantly reducing the resistance from the ground.

A Relationship between speed and frequency/width of input pulse for crawling and bouncing gaits. Solid lines represent crawling gait data, while dashed lines represent bouncing gait data tested on an epoxy resin surface. The error bars indicate the standard deviation of five trials. B Comparative analysis of speed versus body weight across different categories: arthropods (green shading), insect robots (under 10 g). A red diamond represents the results of this study. C Speed measurements for crawling and bouncing gaits on different surfaces. The error bars indicate the standard deviation of three trials. D Optical images demonstrating the robot overcoming an obstacle in 1.2 s using the bouncing gait. E Illustration of the robot’s continued rapid forward movement even after experiencing puncture damage. (See Fig. S18 for microscopic images).
Motion performance, depicted in Fig. 3B with our robot highlighted by a red diamond, is compared with other insect robots (under 10 g) and arthropods (Data from refs. 3,4,6,7,40,57,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84,85,86,87,88,89,90). Our robot boasts one of the fastest speeds among insect robots of similar size, comparable to arthropods (indicated by the green area). For testing movement across different surfaces, we measured the velocities of both the bouncing and crawling gaits on surfaces with varying roughness (Supplementary Figs. 7 and 13), including rough wood, flat epoxy resin, and smooth glass (Coefficients of friction µ = 0.8, 0.5, 0.3, respectively), as presented in Fig. 3C. As anticipated, the robot moves faster on smoother surfaces due to reduced friction. In the bouncing gait, the robot spends less time sliding friction with the ground, resulting in higher speeds than in the crawling gait. Additionally, the robot demonstrated excellent speed stability on the flat epoxy surface, which is primarily used for data collection in other tests.
Due to their diminutive size, micro-robots face significant challenges when navigating real-world environments, particularly when encountering external obstacles and damage. Figure 3D illustrates the robot’s capability to surmount an irregular obstacle rapidly using the bouncing gait (Supplementary Movie 5), where the obstacle is up to 1.5 mm in height (167% of the leg length). Figure 3E shows that after needle puncture damage, the robot’s speed and trajectory are not significantly affected, demonstrating the robustness and performance redundancy of the actuator (Supplementary Figs. 14, 18, and Movie 6). This is because even with small punctures on the chamber sidewall, the leakage rate does not exceed the air expansion rate, and the axial instantaneous pressure can still drive the piston to perform work. Since puncture damage does not affect the actuator’s reciprocating motion, the robot still moves along a straight line. Additionally, we demonstrated the robot’s ability to climb inclines and its capacity for rapid movement while carrying loads, as shown in Supplementary Figs. 8 and 9 (Supplementary Movies 7 and 8).
Amphibious mode for environment adaptability
By further designing the configuration of the crawling robot, we achieved an amphibious mode, which can extend the robot’s operational range. However, movement in water depends on hydrodynamics rather than friction-based movement on land, posing challenges for both the robot’s structural design and propulsion mechanisms. The chamber structure of the AH actuator allows for a low mass-to-volume ratio, enabling flotation on water due to surface tension. To improve the carrying capacity of the robot and avoid water entering the piston to affect the AH process, we designed a buoyant plate (shown in orange in Fig. 4A and Supplementary Fig. 16) to increase the contact area between the robot and the water surface, building upon the prototype shown in Fig. 1B. SMA wires are integrated into the center of the buoyant plate, serving as a supportive skeleton. Flippers were incorporated into the robot’s four legs to enhance thrust in aquatic environments, as shown in gray in Fig. 4A. While the added structure slightly impacts the robot’s bouncing and movement performance, it greatly broadens its applications. On land, the buoyant plate bends to conform to the piston actuator, reducing the robot’s size and increasing agility. When the robot needs to move in water, increasing the input frequency and pulse width raises the actuator’s temperature, causing the SMA wires skeleton on the buoyancy plate to deform due to heat, allowing the buoyant plate to unfold into a flat structure. The structure above the buoyant plate floats while the four legs beneath are submerged. We use one-way SMA wires to support the buoyancy plate so that the plate does not retract after cooling, ensuring that the robot stays afloat. The membrane in the flippers is not adhered to its horizontal frame, allowing each foot to exert force in only one direction, as illustrated in Fig. 4B. When the actuator generates displacement output, the flippers on the robot’s front and rear legs move asymmetrically, supported by the frame and water resistance, thereby generating an overall forward thrust for underwater propulsion (see Supplementary Text 2 for details). After one driving cycle, the robot advances a distance of ∆x.

A Schematic illustrating the amphibious robot and its active-morphing process. The amphibious robot has been enhanced from the prototype by incorporating flotation plates and flippers. B The differential propulsion mechanism employed by the flippers in a water environment. C Optical image showing the buoyant plate unfolding within 3.2 s in a terrestrial environment before entering the water. D Performance of the robot moving at a relative speed of 2 BL/s in an aquatic environment. E Robot’s traversal in a simulated terrestrial-aquatic environment. Initially, the robot progresses using a crawling gait. Upon encountering a water body, it initiates an active-morphing process, allowing it to transition into the water and commence swimming once the buoyancy plate has unfolded. The inclusion of a downward slope is designed to mimic low-lying areas susceptible to waterlogging.
The amphibious mode of the robot consists of an active-morphing process of unfolding the buoyant plate on land and a swimming process on water. The input electrical pulse parameters control the buoyancy plate’s unfolding. Under the parameters of pulse width less than 100 ns and frequency lower than 50 Hz, the robot only crawls, and the buoyant plate does not deploy. Under the parameters of pulse width of 500 ns and frequency of 150 Hz, the buoyancy plate unfolds after 3.2 s, as shown in Fig. 4C. Since the projected area of the buoyant plate in the forward direction is zero, there is no additional wind resistance, which virtually does not affect forward speed on land. When the robot is in motion within a liquid medium, the period of the actuator increases due to the influence of the non-negligible resistance exhibited by the surrounding liquid, so the input frequency of the response must be diminished. At 10 Hz, the actuator reaches its resonant frequency, and the robot’s velocity was observed to be 2 BL/s, as illustrated in Fig. 4D.
Subsequently, the robot was tested in an aquatic-terrestrial environment with downward slopes to simulate low-lying areas where water accumulates, as shown in Fig. 4E. It crawled in land mode. When it encountered a water environment, it took a moment for the buoyancy plates to deploy and transition to swimming mode. Then, it entered the water using its flippers to achieve forward movement in the aquatic environment (Supplementary Movie 9).
Discussion
This work introduces an insect-scale active-morphing robot utilizing the AH actuation principle. This mechanism leverages heat the actuator generates to induce deformations in its SMA frame, permitting actively controllable deformation and self-recovery. We have demonstrated the robot’s adaptability in confined and amphibious environments and its ability to recover after being subjected to a force five million times its own weight. Moreover, the high performance of the AH actuator enables the robot to maintain rapid movement even after enduring needle penetration damage. The robot also exhibits various locomotor abilities, including obstacle-crossing, load-carrying, and moving on inclined surfaces. Additionally, the robot achieved a movement speed of 83.4 BL/s, making it one of the fastest-legged microrobots currently developed.
Our research indicates the potential for utilizing micro-robots in geological exploration and disaster relief applications. Considering the features of our robot, we can envision several advantageous applications: during routine storage or transportation, the robot can be flattened and stacked without requiring delicate protection, and when needed, it can swiftly regain its original form. In geological exploration, the robot can navigate narrow crevasses and proceed directly without circumventing aquatic environments. Additionally, by training the shape of the SMA wires, the robot can efficiently adapt to the shape requirements of other new scenarios.
In the future, we will consider partially biased morphing of the actuator and legs to enhance the steerability of the robot, provided that the effects of different electrode configurations and actuator morphing on the performance are thoroughly investigated. Additionally, transitioning to an untethered design is essential in subsequent development stages to expand the robot’s operational range and application potential. Based on the robot’s energy demands, employing onboard batteries or solar panels would notably increase its weight. Therefore, integrating the micro-actuator and micro-drive circuits and using a laser or radio frequency power source for remote energy input may be beneficial57,91,92. Alternatively, larger untethered robots can be used to carry several of our tethered robots for long-distance applications, with the more giant robots providing the energy for the micro-robots. To enable the robot’s repeated use, employing two-way shape memory materials is recommended93,94,95,96. These materials allow the robot to morph shape actively at high temperatures. When actuator power is reduced and temperature decreases, these materials enable the robot to revert to its original shape, enhancing its reusability. In conclusion, this study proposes a coupling mechanism of actuation and deformation, providing a development approach for applying insect robots in exploration, rescue, and other fields.
Methods
Design and fabrication process of the prototype robot
Our robots are cost-effective and have a simple structure processed from four main materials: SMA wires, tungsten plate, polyimide film, and glass fiber plate. The central part of the robot is the AH actuator; we use polyimide film (0.025 mm) to make the chambers and keep a gap of 0.1 mm between the inner and outer chambers. To prevent discharges between the electrodes and alloy wires, we utilize a series dielectric method with two pieces of polyimide film acting as barriers between them.
In the fabrication process shown in Fig. S1, to improve processing accuracy, laser cutting (HANS LASER EP-15-THG-S, cutting accuracy of 20 nm) is applied to three materials. The tungsten plate (0.05 mm) is for the electrodes, the polyimide film (0.025 mm) is used to make the two-dimensional (2D) springs and the basic planar structures of the chambers, and the glass fiber plate (0.1 mm) is as the material for support and connection structures. In Fig. S1(iii), the components in a flat structure are, from left to right, the middle layers, the bottom plates for internal and external chambers, the electrodes, the springs, and the fixed structures of bottom plates and legs. Based on the planar structure in Supplementary Fig. 1 (ii), the chambers are made into three-dimensional structures by bonding the ends with thermal adhesive (DuPont Pyralux LF0250). In the specific procedure, we overlapped the ends of the plane structures, sandwiched a piece of thermal adhesive film between them, and then pressed the three-layer structure together and baked it for 2 h at 150 °C. The trained NiTi SMA wires (WUHANG Metal Materials Co., Dong Guan City, Phase transition temperature between 60 °C and 90 °C) are pasted in the middle of the chambers. Moreover, in order to minimize friction, the alloy wires of the outer chamber are pasted on the outer wall of the chamber, and the alloy wires of the inner chamber are pasted on the inner wall of the chamber. The robot’s four legs are made of NiTi superelastic wires (0.08 mm), and in order to create asymmetric friction with the ground, the front legs are longer than the back legs, and both are at 75° to the ground. Finally, assemble and bind the components in the order shown in Fig. S1(vi) to complete the prototype robot.
The training technique of NiTi SMA wires
For example, the alloyed wire is designed as a circle in the prototype robot. As illustrated in Supplementary Fig. 2, we wind SMA wires with a diameter of 0.1 mm onto a cylindrical mold of set dimensions, pulling the ends of the wire tight. The mold is baked in a high-temperature oven at 320 °C for 3 min to complete the training of the specific shape of the SMA wire.
Measurement of the AH actuator’s driving force
We experimentally measured the AH actuator’s driving force based on the momentum theorem. With the set input parameters of 6500 V–500 ns, the springs on both sides of the actuator were removed, and the inner chamber was fixed so that the outer chamber was free to eject. Excited by a single pulse signal, the outer chamber was pushed out and moved in free-fall along the parabola, shown in Supplementary Fig. 4. Approximate the motion in 1 ms as a uniformly accelerated process. According to the equation of the theorem of momentum:
Where m = 3.59 mg is the mass of the outer chamber, \(v=\frac{\Delta x}{\Delta t}=1\,{{{\rm{m}}}}/{{{\rm{s}}}}\), we get the magnitude of the driving force \({F}_{m}\) as 3.59 mN.
Vibration characteristics of the AH actuator
The piston vibrates under the action of the driving force and spring restoring force, and the inner and outer chambers move relative to each other. When the relative displacement of the two chambers is reduced to zero by the spring elastic force, the inner and outer chambers collide, resulting in zero relative velocity. This marks the end of one vibration cycle, and the next pulse signal will start a new cycle. The actuator’s motion is simplified to undamped forced vibration based on the classical mass-spring model due to the negligible friction, as shown in the equation below.
Where c = 0 is the damping coefficient, k is the stiffness of two springs in parallel, m is the mass of the non-fixed chamber, and F is the driving force regarded as constant over a short period, shown as the following expression,
where tm = 1 ms is the duration of the force, \({F}_{m}\) is the magnitude of the force, T = 1/f, is the period of the rectangular pulse.
Excited by the rectangular pulse force, the actuator generates forced vibration within the pulse and free vibration outside of it. The initial value of the free vibration phase is equal to the final value of the forced vibration phase. Therefore, during one driving cycle, the correlation between the vibration displacement of the actuator and the time can be expressed as follows.
\({\omega }_{n}=\sqrt{k/m}\), is natural frequency. The solid line in Fig. 2D represents the simulation results (using MATLAB R2021a).
Data availability
All data are available in the main text or the supplementary materials.
References
Kumar, V., Rus, D. & Singh, S. Robot and sensor networks for first responders. IEEE Pervasive Comput. 3, 24–33 (2004).
Tang, C. et al. A pipeline inspection robot for navigating tubular environments in the sub-centimeter scale. Sci. Robot. 7, eabm8597 (2022).
Zhakypov, Z., Mori, K., Hosoda, K. & Paik, J. Designing minimal and scalable insect-inspired multi-locomotion millirobots. Nature 571, 381–386 (2019).
Ji, X. et al. An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators. Sci. Robot. 4, eaaz6451 (2019).
Wu, C. et al. A multi-modal tailless flapping-wing robot capable of flying, crawling, self-righting and horizontal take-off. IEEE Robot. Autom. Lett. 9, 4734–4741 (2024).
Vogtmann, D., St. Pierre, R. & Bergbreiter, S. A 25 MG magnetically actuated microrobot walking at >5 body lengths/sec. in 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS). pp. 179–182 (2017).
Wu, Y. et al. Insect-scale fast moving and ultrarobust soft robot. Sci. Robot. 4, eaax1594 (2019).
de Rivaz, S. D. et al. Inverted and vertical climbing of a quadrupedal microrobot using electroadhesion. Sci. Robot. 3, eaau3038 (2018).
St. Pierre, R. & Bergbreiter, S. Toward autonomy in sub-gram terrestrial robots. annual review of control. Robot. Auton. Syst. 2, 231–252 (2019).
Johnson, W. R., Woodman, S. J. & Kramer-Bottiglio, R. An electromagnetic soft robot that carries its own magnet. in 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft). pp. 761–766 (2022).
St. Pierre, R. & Bergbreiter, S. Gait exploration of sub-2 g robots using magnetic actuation. IEEE Robot. Autom. Lett. 2, 34–40 (2017).
Kim, S., Kubicek, R. & Bergbreiter, S. 3D-printed electrostatic microactuators for flexible microsystems. Adv. Funct. Mater. 33, 2304991 (2023).
Shah, D. et al. Shape Changing Robots: Bioinspiration, Simulation, and Physical Realization. Adv. Mater. 33, 2002882 (2021).
Laschi, C., Mazzolai, B. & Cianchetti, M. Soft robotics: technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 1, eaah3690 (2016).
Jayaram, K. & Full, R. J. Cockroaches traverse crevices, crawl rapidly in confined spaces, and inspire a soft, legged robot. Proc. Natl Acad. Sci. USA 113, E950–E957 (2016).
Henschel, R. & Spiders, J. wheel to escape. South Afr. J. Sci. 86, 151–152 (1990).
Hawkes, E. et al. Programmable matter by folding. Proc. Natl Acad. Sci. USA 107, 12441–12445 (2010).
Rus, D. & Tolley, M. T. Design, fabrication and control of origami robots. Nat. Rev. Mater. 3, 101–112 (2018).
Baek, S.-M., Yim, S., Chae, S.-H., Lee, D.-Y. & Cho, K.-J. Ladybird beetle–inspired compliant origami. Sci. Robot. 5, eaaz6262 (2020).
Miyashita, S., Guitron, S., Li, S. & Rus, D. Robotic metamorphosis by origami exoskeletons. Sci. Robot. 2, eaao4369 (2017).
Johnson, K. et al. Solar-powered shape-changing origami microfliers. Sci. Robot. 8, eadg4276 (2023).
Wang, C. et al. Reconfigurable origami-inspired multistable metamorphous structures. Sci. Adv. 10, eadk8662 (2024).
Haghpanah, B., Salari-Sharif, L., Pourrajab, P., Hopkins, J. & Valdevit, L. Multistable shape-reconfigurable architected materials. Adv. Mater. 28, 7915–7920 (2016).
Lee, D.-Y., Kim, S.-R., Kim, J.-S., Park, J.-J. & Cho, K.-J. Origami wheel transformer: a variable-diameter wheel drive robot using an origami structure. Soft Robot. 4, 163–180 (2017).
Lee, D.-Y., Kim, J.-K., Sohn, C.-Y., Heo, J.-M. & Cho, K.-J. High–load capacity origami transformable wheel. Sci. Robot. 6, eabe0201 (2021).
Peng, X. & Wang, H. Shape changing hydrogels and their applications as soft actuators. J. Polym. Sci. Part B 56, 1314–1324 (2018).
Yang, X. et al. An agglutinate magnetic spray transforms inanimate objects into millirobots for biomedical applications. Sci. Robot. 5, eabc8191 (2020).
Duduta, M., Wood, R. J. & Clarke, D. R. Multilayer dielectric elastomers for fast, programmable actuation without prestretch. Adv. Mater. 28, 8058–8063 (2016).
Ahn, C., Liang, X. & Cai, S. Bioinspired design of light‐powered crawling, squeezing, and jumping untethered soft robot. Adv. Mater. Technol. 4, 1900185 (2019).
Shepherd, R. F. et al. Multigait soft robot. Proc. Natl. Acad. Sci. USA 108, 20400–20403 (2011).
Hawkes, E. W., Blumenschein, L. H., Greer, J. D. & Okamura, A. M. A soft robot that navigates its environment through growth. Sci. Robot. 2, eaan3028 (2017).
Tang Yichao et al. Leveraging elastic instabilities for amplified performance: Spine-inspired high-speed and high-force soft robots. Sci. Adv. 6, eaaz6912 (2020).
Shah, D. S. et al. A soft robot that adapts to environments through shape change. Nat. Mach. Intell. 3, 51–59 (2021).
Lin, H.-T., Leisk, G. G. & Trimmer, B. GoQBot: a caterpillar-inspired soft-bodied rolling robot. Bioinspir. Biomim. 6, 026007 (2011).
Steltz, E., Mozeika, A., Rodenberg, N., Brown, E. & Jaeger, H. M. JSEL: jamming skin enabled locomotion. in 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 5672–5677 (IEEE, St. Louis, MO, USA, 2009).
Chen, T. et al. Scale-inspired programmable robotic structures with concurrent shape morphing and stiffness variation. Sci. Robot. 9, eadl0307 (2024).
Shah, D. S., Yuen, M. C., Tilton, L. G., Yang, E. J. & Kramer-Bottiglio, R. Morphing robots using robotic skins that sculpt clay. IEEE Robot. Autom. Lett. 4, 2204–2211 (2019).
Baines, R. et al. Multi-environment robotic transitions through adaptive morphogenesis. Nature 610, 283–289 (2022).
Wang, X. et al. Multimodal locomotion ultra-thin soft robots for exploration of narrow spaces. Nat. Commun. 15, 6296 (2024).
Hu, W., Lum, G. Z., Mastrangeli, M. & Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 554, 81–85 (2018).
Lee, W.-K. et al. A buckling-sheet ring oscillator for electronics-free, multimodal locomotion. Sci. Robot. 7, eabg5812 (2022).
Pang, W. et al. A soft microrobot with highly deformable 3D actuators for climbing and transitioning complex surfaces. Proc. Natl. Acad. Sci. USA 119, e2215028119 (2022).
Booth, J. W. et al. OmniSkins: robotic skins that turn inanimate objects into multifunctional robots. Sci. Robot. 3, eaat1853 (2018).
Baines, R., Fish, F., Bongard, J. & Kramer-Bottiglio, R. Robots that evolve on demand. Nat. Rev. Mater. 9, 822–835 (2024).
Jeong, J. et al. Spikebot: a multigait tensegrity robot with linearly extending struts. Soft Robot. 11, 207–217 (2024).
Shah, D. S. et al. Tensegrity robotics. Soft Robot. 9, 639–656 (2022).
Shepherd, R. F. et al. Using explosions to power a soft robot. Angew. Chem. Int. Ed. 52, 2892–2896 (2013).
Tolley, M. T. et al. An untethered jumping soft robot. in 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 561–566 (2014).
Yang, X., Chang, L. & Pérez-Arancibia, N. O. An 88-milligram insect-scale autonomous crawling robot driven by a catalytic artificial muscle. Sci. Robot. 5, eaba0015 (2020).
Aubin, C. A. et al. Powerful, soft combustion actuators for insect-scale robots. Science 381, 1212–1217 (2023).
Zufferey, R. et al. Consecutive aquatic jump-gliding with water-reactive fuel. Sci. Robot. 4, eaax7330 (2019).
Chen, Y. et al. A biologically inspired, flapping-wing, hybrid aerial-aquatic microrobot. Sci. Robot. 2, eaao5619 (2017).
Bartlett, N. W. et al. A 3D-printed, functionally graded soft robot powered by combustion. Science 349, 161–165 (2015).
Loepfe, M., Schumacher, C. M., Lustenberger, U. B. & Stark, W. J. An untethered, jumping roly-poly soft robot driven by combustion. Soft Robot. 2, 33–41 (2015).
Yun, R., Qi, M., Liu, Z., Leng, J. & Yan, X. Modeling and testing of a fast-crawling millimeter-sized robot. IEEE Robot. Autom. Lett. 8, 5862–5869 (2023).
Yun, R. et al. A 3.4-millimeter flea-sized robot with powerful jumping and fast crawling locomotion. IEEE Robot. Autom. Lett. 8, 2868–2873 (2023).
Yun, R., Che, J., Liu, Z., Yan, X. & Qi, M. A novel electric stimulus-responsive micro-actuator for powerful biomimetic motions. Nanoscale 15, 12933–12943 (2023).
Leo, D. J. Engineering Analysis of Smart Material Systems. (John Wiley & Sons, 2007).
Lagoudas, D. C. Shape Memory Alloys: Modeling and Engineering Applications. (Springer Science & Business Media, 2008).
Kim, S. et al. Micro artificial muscle fiber using NiTi spring for soft robotics. in 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 2228–2234 (IEEE, St. Louis, MO, USA, 2009).
St. Pierre, R., Gosrich, W. & Bergbreiter S. A 3D-printed 1 mg legged microrobot running at 15 body lengths per second. in Solid-State Sensors, Actuators, and Microsystems Workshop (Hilton Head, SC, 2018).
Maeda, S., Hara, Y., Sakai, T., Yoshida, R. & Hashimoto, S. Self-walking gel. Adv. Mater. 19, 3480–3484 (2007).
Duduta, M., Clarke, D. R. & Wood, R. J. A high speed soft robot based on dielectric elastomer actuators. in 2017 IEEE International Conference on Robotics and Automation (ICRA). pp. 4346–4351 (2017).
Qi, M. et al. A fast-moving electrostatic crawling insect. in 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS). pp. 761–764 (IEEE, Las Vegas, NV, USA, 2017).
Shin, B. et al. Hygrobot: a self-locomotive ratcheted actuator powered by environmental humidity. Sci. Robot. 3, eaar2629 (2018).
Ma, Y. et al. Polyelectrolyte multilayer films for building energetic walking devices. Angew. Chem. 123, 6378–6381 (2011).
Lu, H. et al. A bioinspired multilegged soft millirobot that functions in both dry and wet conditions. Nat. Commun. 9, 3944 (2018).
Morales, D., Palleau, E., Dickey, M. D. & Velev, O. D. Electro-actuated hydrogel walkers with dual responsive legs. Soft Matter 10, 1337–1348 (2014).
Xu, L. et al. Bio-inspired annelid robot: a dielectric elastomer actuated soft robot. Bioinspir. Biomim. 12, 025003 (2017).
Miyashita, S., Guitron, S., Ludersdorfer, M., Sung, C. R. & Rus, D. An untethered miniature origami robot that self-folds, walks, swims, and degrades. in 2015 IEEE International Conference on Robotics and Automation (ICRA). pp. 1490–1496 (IEEE, Seattle, WA, USA, 2015).
Baisch, A. T., Ozcan, O., Goldberg, B., Ithier, D. & Wood, R. J. High speed locomotion for a quadrupedal microrobot. Int. J. Robot. Res. 33, 1063–1082 (2014).
Zhao, J. et al. Soft and fast hopping–running robot with speed of six times its body length per second. Soft Robot. 6, 713–721 (2019).
Baisch, A. T., Sreetharan, P. S. & Wood, R. J. Biologically-inspired locomotion of a 2 g hexapod robot. in 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 5360–5365 (IEEE, Taipei, 2010).
Goldberg, B. et al. Power and control autonomy for high-speed locomotion with an insect-scale legged robot. IEEE Robot. Autom. Lett. 3, 987–993 (2018).
Hoover, A. M., Steltz, E. & Fearing, R. S. RoACH: an autonomous 2.4 g crawling hexapod robot. in 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 26–33 (2008).
Baisch, A. T. et al. HAMR3: an autonomous 1.7 g ambulatory robot-all databases. in 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 25–30 (2011).
Lee, D., Kim, S., Park, Y.-L. & Wood, R. J. Design of centimeter-scale inchworm robots with bidirectional claws. in 2011 IEEE International Conference on Robotics and Automation. pp. 3197–3204 (IEEE, Shanghai, China, 2011).
Koh, J.-S. & Cho, K.-J. Omega-shaped inchworm-inspired crawling robot with large-index-and-pitch (LIP) SMA spring actuators. IEEE/ASME Trans. Mechatron. 18, 419–429 (2013).
Tomita, N., Takagi, K. & Asaka, K. Development of a quadruped soft robot with fully IPMC body. in SICE Annual Conference 2011. pp. 1687–1690 (2011).
Must, I. et al. Ionic and capacitive artificial muscle for biomimetic soft robotics. Adv. Eng. Mater. 17, 84–94 (2015).
Rubin, S., Young, M. H.-Y., Wright, J. C., Whitaker, D. L. & Ahn, A. N. Exceptional running and turning performance in a mite. J. Exp. Biol. https://doi.org/10.1242/jeb.128652 (2016).
Duncan, F. D. & Crewe, R. M. A comparison of the energetics of foraging of three species of Leptogenys (Hymenoptera, Formicidae). Physiol. Entomol. 18, 372–378 (1993).
Jensen, T. F. & Holm-Jensen, I. Energetic cost of running in workers of three ant species, Formica fusca L., Formica rufa L., and Camponotus herculeanus L. (Hymenoptera, Formicidae). J. Comp. Physiol. B 137, 151–156 (1980).
Wittlinger, M., Wehner, R. & Wolf, H. The desert ant odometer: a stride integrator that accounts for stride length and walking speed. J. Exp. Biol. 210, 198–207 (2007).
Kamoun, S. Flightlessness and Rapid Terrestrial Locomotion in Tiger Beetles of the Cicindela L. Subgenus Rivacindela van Nidek from Saline Habitats of Australia (Coleoptera: Cicindelidae). Coleopterists Bull. 50, 221–230 (1996).
Amaya, C. C., Klawinski, P. D., Daniel, R. & Formanowicz, J. The effects of leg autotomy on running speed and foraging ability in two species of wolf spider, (Lycosidae). Amid 145, 201–205 (2001).
Hurlbert, A. H., Ballantyne Iv, F. & Powell, S. Shaking a leg and hot to trot: the effects of body size and temperature on running speed in ants. Ecol. Entomol. 33, 144–154 (2008).
Bartholomew, G. A., Lighton, J. R. B. & Louw, G. N. Energetics of locomotion and patterns of respiration in tenebrionid beetles from the Namib Desert. J. Comp. Physiol. B 155, 155–162 (1985).
Weihmann, T., Brun, P.-G. & Pycroft, E. Speed dependent phase shifts and gait changes in cockroaches running on substrates of different slipperiness. Front. Zool. 14, 54 (2017).
Full, R. J. & Tu, M. S. Mechanics of a rapid running insect: two-, four-and six-legged locomotion. J. Exp. Biol. 156, 215–231 (1991).
James, J., Iyer, V., Chukewad, Y., Gollakota, S. & Fuller, S. B. Liftoff of a 190 mg laser-powered aerial vehicle: the lightest wireless robot to fly. in 2018 IEEE International Conference on Robotics and Automation (ICRA). pp. 3587–3594 (2018).
Ishihara, H., Arai, F. & Fukuda, T. Micro mechatronics and micro actuators. IEEE/ASME Trans. Mechanotron. 1, 68–79 (1996).
Kato, T., Tokuda, M., Inaba, T. & Yamazaki, M. Experimental research on two-way shape memory effect of TiNi shape memory alloy. KEM 274–276, 1095–1100 (2004).
Yoo, Y. I., Lee, J. J., Lee, C. H. & Lim, J. H. An experimental study of the two-way shape memory effect in a NiTi tubular actuator. Smart Mater. Struct. 19, 125002 (2010).
Yoo, Y. I. & Lee, J. J. Study on the two-way shape memory characteristics induced by compressive loading cycles. AMR 123–125, 1023–1026 (2010).
Zare, M., Prabhakaran, M. P., Parvin, N. & Ramakrishna, S. Thermally-induced two-way shape memory polymers: mechanisms, structures, and applications. Chem. Eng. J. 374, 706–720 (2019).
Acknowledgements
This work is supported by National Natural Science Foundation of China (Grant No. 52272384). Any opinions, findings, conclusions, or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Natural Science Foundation of China.
Author information
Authors and Affiliations
Contributions
Conceptualization: J.C., X.Y., and M.Q; Methodology: J.C., X.Y., J.P., and J.L.; Writing—original draft: J.C. and X.Y.; Writing—review & editing: M.Q. and Z.L.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks Krishna Manaswi Digumarti and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Che, J., Yang, X., Peng, J. et al. Arc-heating actuated active-morphing insect robots. Nat Commun 16, 3014 (2025). https://doi.org/10.1038/s41467-025-58258-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41467-025-58258-8
