
Abstract
The moiré superlattice, created by stacking van der Waals layered materials with rotational misalignments, exhibits a multitude of emergent correlated phenomena ranging from superconductivity to Mott insulating states. In addition to exotic electronic states, the intricate networks of incommensurate lattices may give rise to polymer-like viscoelasticity, which combines the properties of both elastic solids and viscous fluids. This phenomenon may enrich the dynamics of nanomechanical resonators, in which viscoelasticity has not played a role thus far. Here, we report on a controllable hysteretic response of the nanomechanical vibrations in twisted bilayer graphene membranes, which we attribute to viscoelasticity. Accompanying this hysteretic response, we measure unusually large mechanical quality factors Q reaching a remarkably high value of ~1900 at room temperature. We interpret the enhancement of Q as a signature of dissipation dilution, a phenomenon of considerable interest that has recently been harnessed in quantum optomechanical systems. Viscoelasticity features a “lossless” potential that overcomes the corrugation registry and reinforces such a dissipation dilution. Our work introduces the moiré superlattice as a promising system for viscoelasticity engineering through rotating angles and for observing emergent nanoelectromechanical couplings.
Similar content being viewed by others

Introduction
Viscoelastic materials display the properties of both viscous liquids and elastic solids1 known in amorphous polymers2 and human tissues3. In response to a mechanical perturbation, viscoelastic materials exhibit an instantaneous elastic response, followed by a time-dependent mechanical response and energy dissipation. Such time-dependent mechanical behaviours (e.g., stress relaxation and creep)4 have led to the discovery of new materials with many useful applications3,5, but have so far remained elusive in two-dimensional (2-D) systems. Viscoelastic phenomena may also enrich the dynamics of nanomechanical resonators6,7,8,9,10,11, in which viscoelasticity has not played a role thus far. On the one hand, viscoelasticity may increase dissipation. On the other hand, and counterintuitively, we propose that it may lower dissipation following a process akin to dissipation dilution12.
Stacking 2-D monolayers with rotational misalignment produces a moiré superlattice that can dramatically alter the electronic structure of the system13,14,15,16,17,18,19,20,21,22. The emergence of an ultra-flat band near the Fermi energy for twisted bilayer graphene (TBG) with a ‘magic angle’ (MA, θ ~ 1.1°) is fundamental to the variety of correlated electronic phases15,16,17,18. For such a small twist angle, the atomic structural relaxation23,24,25,26 forces the superlattice into an energetically favourable commensurate state by gaining van der Waals energy (pinned state). In contrast, the short moiré period \(\lambda (\theta )=\frac{a}{\sqrt{2-2\cos \theta }}\), where a is the lattice parameter of graphene, of TBG with a larger twist angle leads to an incommensurate superlattice with quasi-crystalline orders27. Such incommensurate contacting surfaces would slide with negligible friction if they were laterally stiff, a phenomenon called structural superlubricity28,29,30,31,32. However, the competition between sliding and pinning in a structurally lubric 2-D interface could make TBGs with an intermediate twist angle retain viscoelastic behaviours, which could offer a basis for developing viscoelastic nanomechanical resonators.
Here, using optomechanical techniques and optical spectroscopy, we measure the vibrations of nanoelectromechanical resonators made of TBG with a moderate twist angle and observe butterfly-shaped hysteresis loops of their resonant frequencies as a function of a gate voltage, a phenomenon we interpret as a viscoelastic behaviour. We study how the shape of these frequency loops evolves as the range and the stepping rate of the gate voltage are changed. Importantly, our observations are repeatable and controllable in all of our devices. Furthermore, by continuously increasing the electrostatic pressure applied to the membrane, we find that the mechanical quality factor Q is significantly enhanced at room temperature, a counter-intuitive phenomenon we ascribe to dissipation dilution12 that is reinforced by the reduced intrinsic dissipation. Our work introduces mechanical resonators made from moiré superlattices as promising systems for viscoelasticity engineering through rotating angles, and as dynamic probes to control emergent nanoelectromechanical couplings33,34.
Results
Large TBG drumhead resonators
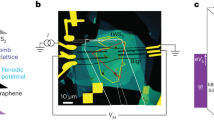
The TBG drumhead nanomechanical resonators are prepared by a ‘tear-and-stack’ method using both wet and dry transfer techniques (see Methods). Supplementary Table S1 presents our devices based on their size, their twist angle, and the transfer technique we have used. Figure 1a displays the TBG drums, suspended over cylindrical cavities, that we have investigated. They are labelled as drum 1 (diameter D = 6 μm), drum 2 (D = 8 μm) and drum 3 (D = 12 μm) in Device A. A moderate twist angle θ ~ 12° was set during the fabrication and extracted from micro-Raman spectroscopy measurements (see Methods). To drive the flexural vibrations of the drums, a time-dependent gate voltage is applied to the Ti/Au leads as shown in Fig. 1b. The DC component of the resulting force allows us to control the static deflection ξ and the deflection-induced in-plane stress and strain, while the AC voltage provides a harmonic driving force that actuates the TBG drums. A single laser beam is used to interferometrically measure the mechanical responses of the TBG drums and to simultaneously record the micro-Raman scattering responses of the membrane35. All measurements are performed at room temperature under high vacuum (see Methods).

a Optical image of Device A with three TBG drums (1, 2, 3) contacted by a Ti/Au lead. The right panel shows the schematics of the moiré pattern formed by a twist angle of θ ~ 12°, where alternating AA, AB and, BA stacked regions appear (scale bar: 1 nm). b Sketch of our experiment combining electrostatic actuation, optical displacement readout, and micro-Raman spectroscopy. The TBG (with its static displacement ξ) is represented by the dark blue dashed line; its flexural motion is sketched in light blue. M, LEF, and APD represent a mirror, a long-pass edge filter, and an avalanche photodiode, respectively. c Raman spectrum of TBG measured at the centre of drum 2 (D = 8 μm) by excitation at 532 nm plus the extended spectral region for the \({{{{\rm{R}}}}}^{{\prime} }\) mode. Inset: a mini-Brillouin zone with a twist angle dependent lattice vector q(θ). d The frequencies of the G and the \({{{{\rm{R}}}}}^{{\prime} }\) modes extracted from Raman spectra measured with Vdc varying from − 9 V to 0 V. The straight dashed line is a guide for the eye. Error bars are extracted from the fits to the Raman spectra. e The resonant mechanical response measured in drum 3 (D = 12 μm) at Vdc = − 10 V shows a large Q of ~ 1900 at room temperature. f Mechanical frequency responses measured with Vdc undergoing the forward-then-backward sweep sequence (indicated by arrows), forming a butterfly-shaped hysteresis loop.
We first estimate θ from the moiré superlattice-activated Raman mode. Figure 1c shows the Raman spectrum of the suspended TBG measured at the centre of drum 2 with a 532 nm excitation (see Methods), which shows two main features: the strong G mode and the weak \({{{{\rm{R}}}}}^{{\prime} }\) mode, arising from the zone-centred (i.e., zero momentum) phonons and the moiré superlattice-activated phonons with momentum \(q(\theta )=\frac{8\pi }{\sqrt{3}a}\sin (\frac{\theta }{2})\) (as shown in the inset to Fig. 1c), respectively. The value of θ is extracted from the frequency of the \({{{{\rm{R}}}}}^{{\prime} }\) mode, which is close to the target value specified in the fabrications. Figure 1d shows the positions of the \({{{{\rm{R}}}}}^{{\prime} }\) mode and of the G mode as the gate voltage Vdc decreases from 0 V to − 9 V. Surprisingly, both modes are less sensitive to Vdc, within our experimental accuracy, than the G mode in monolayer graphene (MLG)35. Meanwhile, the intensity of the G mode remains almost unchanged for Vdc down to − 5 V before decreasing by ~ 10% at Vdc = − 9 V (see Fig. S1c and Methods). These observations indicate that the Vdc-induced tensile strain is negligible compared to the initial built-in strain (ϵ0), which means that our TBG drums are under high tensile stress.
Large Q at room temperature
Figure 1e shows the mechanical response of drum 3 (D = 12 μm) at Vdc = − 10 V. The resonant frequency fr and corresponding Q are extracted by fitting a linear harmonic resonator model to the measured response (see Methods). The largest Q we measure reaches ~ 1900 at room temperature, more than one order of magnitude higher than Q in graphene resonators at room temperature9. Note that such large Q appears at the gate voltage far from the near-zero DC bias, in contrast to graphene resonators35. We observe that resonances with unusually large Q exhibit a butterfly-shaped hysteresis loop as the gate voltage is cycled.
Butterfly-shaped hysteresis loop
To measure the hysteretic nanomechanical responses, we increase and decrease the gate voltage in cycles. Figure 1f shows the amplitude response as a function of drive frequency and Vdc under a forward-then-backward sweep between Vdc = ± 9.5 V, forming a butterfly-shaped hysteresis loop that crosses at Vdc = 0 V (white-dashed arrows in Fig. 1f). Within the butterfly-shaped hysteresis loop, fr increases by only ~ 5%, which is far less than the typical value of ~ 50% in the low-tensioned MLG drum35. Note that all of the mechanical data in this study are from drum 2 in Device A unless otherwise stated. The butterfly-shaped hysteresis loop also shrinks as the sweep range decreases (Fig. S5a). We find that such viscoelastic responses can be controllably obtained by specifying θ close to 15° in our TBG drums, whereas the TBG with θ = 0° does not show a butterfly-shaped hysteresis loop. Supplementary Section S3 provides the statistics on the hysteresis loops of our TBG drums with increasing θ. It suggests that the viscoelasticity in TBG drums is angle-dependent, as we discuss below.
Viscoelastic behaviours
To study the dependence of the shape of the frequency loop on the step rate dVdc/dt, in Fig. 2a we show the hysteresis loops measured at three different values of dVdc/dt. They have been recorded in a backward-then-forward sequence with a step size of 0.25 V. Remarkably, the maximal fr reached by the loop is revealed with the slow step rate. Furthermore, the width of the hysteresis loop, ΔVdc, defined by the largest Vdc shift between the forward and backward traces, shows a non-linear monotonic increase with increasing dVdc/dt, as shown by the experimental data in Fig. 2d.

a Resonant frequency loops at different step rates, dVdc/dt. ○, □, ♢ correspond to a slow, medium, and fast step rate, respectively. The arrows indicate the direction of the sweep. b Schematic of the flexural drum vibration (top panel) and the reduced viscoelastic model (bottom panel). The membrane flexural motion is modelled by a mass (M) connected to a spring (k) and a dashpot (ηs) in parallel (Kelvin-Voigt model) to include the effects of viscoelasticity. D is the diameter of the drum. c Experimental and fitted (ϵ0 = 2.67 × 10−4 and ηs = 10.5 × 1015 Pa s) resonant frequency loop under the slow stepping rate (○). d Experimental and calculated ΔVdc as a function of dVdc/dt. e Evolution of fr and Q upon repeating the forward-then-backward step sweep of Vdc in three consecutive rounds (1st, 2nd, 3rd) for two traces (trace 1 and trace 2) corresponding to different initialisations. ts is the time interval (only denoted between two different rounds) when the step direction is reversed.
Below we consider various mechanisms that may explain our observations. We rule out contamination as the origin of the viscoelastic behaviour by reproducing the hysteresis loop on optimally clean TBG drums fabricated by the all-dry transfer method (see Supplementary section S1.4 for surface characterization by atomic force microscopy). Euler instabilities36 and mechanically conservative nonlinearities36, which would also give rise to hysteresis frequency loops, can be safely ruled out. Nonlinearities can be disregarded because the shape of our frequency loops does not depend on the strength of the driving force (Fig. S9). Sliding motion at the clamping points can also be excluded because such a sliding produces a plateau for fr near the switching points37.
Alternatively, a process that may account for our observations is a viscoelastic one. We model the TBG drums as a spring and a dashpot connected in parallel (Fig. 2b), known as the Kelvin-Voigt model (KVM), to include the effects of viscoelasticity1. The constitutive relation is expressed as a first-order linear differential equation, \(\sigma=E(\epsilon+{\tau }_{\sigma }\frac{{{{\rm{d}}}}\epsilon }{{{{\rm{d}}}}t}\, )\), where σ is stress, ϵ is strain, E is Young’s modulus, τσ = η/E is the relaxation time, with η the viscosity of the material. Based on this constitutive equation, the resonant frequency of TBG drums is expressed as (see Methods):
with the normal term \({k}_{0}=2{\epsilon }_{0}+\frac{3}{2}{z}^{2}\), the viscoelastic term \({k}_{{{{\rm{s}}}}}=\frac{3}{2}{\tau }_{\sigma {{{\rm{s}}}}}z\frac{{{{\rm{d}}}}z}{{{{\rm{d}}}}t}\), where z = ξ/D is the dimensionless deflection at the centre of the drum, ϵ0 is the built-in strain, τσs = ηs/E with ηs the viscosity of the dashpot, and meff is the effective mass of the vibrational mode. The dynamical equation of motion for z can be constructed from the force equilibrium relation (see Methods). The parameters obtained by numerically solving the dynamical equation are plugged into Eq. (1) to calculate fr. Using these experimental parameters, the KVM reproduces the shape of the frequency loops well, as shown in Fig. 2c for a slow step rate (see Supplementary section S2.2 for the fits to butterfly-shaped loops and the stepping-dependent butterfly-shaped loops). The model also reproduces the relationship between ΔVdc and dVdc/dt (Fig. 2d). The implications of the non-linear relationship revealed in Fig. 2d are twofold: first, ΔVdc will decrease to zero for an extremely slow rate, namely without any hysteresis loop; second, ΔVdc will saturate for a fast rate, corresponding to the case where the dynamic system can not follow the external stimuli. Therefore, the time dependence of fr is slow on the scale of the ring-down time and on the scale of the vibrational period.
To gain an intuitive understanding of the behaviour of TBG drums as the gate voltage is cycled, we estimate the damping force, \({F}_{{{{\rm{d}}}}}=S\cdot {\eta }_{{{{\rm{s}}}}}\frac{{{{\rm{d}}}}\epsilon }{{{{\rm{d}}}}t}\approx 1.859\times 1{0}^{-4}\) N, with S the surface area of the drum and viscous energy losses \({E}_{{{{\rm{v}}}}}=S\cdot \oint {\eta }_{{{{\rm{s}}}}}\frac{{{{\rm{d}}}}\epsilon }{{{{\rm{d}}}}t}\,{{{\rm{d}}}}\epsilon \approx 1.41\times 1{0}^{-13}\) J, based on the frequency loop in Fig. 2c which we fit with two parameters, namely ϵ0 = 2.67 × 10−4 and ηs = 10.5 × 1015 Pa s, yielding τσs ≈ 104 s. Our damping force corresponds to a shear stress γ = Fd/S ≈ 3.7 MPa, which is larger than in bilayer graphene38, but comparable to that in twisted MoS239. The proportions of k0 and ks corresponding to Fig. 1e and Fig. 2c are provided in Fig. S6b and Fig. S7c, respectively. We find that the increase in fr within the frequency loop can be fully accounted for by the viscoelastic spring constant ks. For drum 4 in Device B where Vdc is cycled between − 5 V and − 1 V, we obtain ϵ0 = 3.82 × 10−4, ηs = 8.9 × 1015 Pa s, τσs ≈ 104 s, Fd ≈ 2.867 × 10−4 N, Ev = 6.1 × 10−14 J, and γ ≈ 2.5 MPa.
We further test the dynamic nature of the system by repeating the backward-then-forward sweeps in three consecutive rounds, as shown in Fig. 2e. Two traces are recorded, corresponding to different initial fr. A slow convergence to a steady state, where a perfect loop, i.e., with no gaps or crossings at the switching points, is observed in the third round. Trace 2 shows a much smoother path as its initial fr closed to the steady state.
Furthermore, within a resonant frequency loop, we find that Q follows fr, both increasing and decreasing concomitantly. The tunability of Q shows an approximately linear increase as decreasing gate voltage (Fig. 2e). Such enhancements of Q are expected to depend on the gate voltage stepping rate (see Fig. S11a) via ks as discussed above. These observations are in stark contrast to the conventional phenomena for 2-D nanoelectromechanical resonators, where the Q decreases rapidly with increasing electrostatic pressure, which is still a subject of debate35.
Viscoelastic dissipation dilution
To explore the mechanism of energy dissipation related to high-frequency mechanical vibrations (tens of MHz), in Fig. 3a we show Q extracted from the frequency loop corresponding to Fig. 2c, where the linear increments with slightly different slopes are revealed for forward and backward sweeps with a step size of 0.25 V. The different increments in Q under other step rates are given in Fig. S11a. Figure 3b summarises Q as a function of Vdc for three drums in Device A. The large drum tends to have a large Q, which is consistent with many reports in the literature40. There are also a few jumps in Q, as shown in Fig. 3b for drum 3 under a large gate voltage sweep. Such an observation may suggest the existence of further stick-slip actions beyond the atomic scale41.

a Quality factors Q corresponding to Fig. 2c for both forward and backward sweeps. b Q extracted from the mechanical response spectra and as a function of Vdc for drum 1 (D = 6 μm), drum 2 (D = 8 μm) and drum 3 (D = 12 μm), respectively. The dashed arrows denote the Q jumps revealed in drum 3. The solid lines in (a, b) are linear fits to the experimental data (see Supplementary section S2.2). c Top panel: the extended Kelvin-Voigt model, i.e., the intrinsic friction dashpot ηi is added in parallel to the model that has been introduced in Fig. 2b, but here ηs is explicitly replaced by a “lossless" viscoelastic spring ks. Bottom panel: a cartoon of the Prandtl-Tomlison model, where the tip slides on top of a one-dimensional chain of springs, which moves on top of a fixed potential. d The Vdc-dependent Q extracted from the ring-down measurements (Ring.) and fitting of the mechanical responses (M.R.) in drum 11 (D = 12 μm) of Device E. Error bars in the traces of Ring. and M.R. are extracted from the fits of energy decay and mechanical responses, respectively. Note that the ringdown trace has been shifted up by 50 for direct comparison (see Methods). e Energy decay traces (in log scale) at different Vdc in drum 11 (D = 12 μm) of Device E (see Methods).
Firstly, we use our estimates of ηs and ϵ0 to estimate the contribution of dissipation dilution in our measurements. The phenomenon of dissipation dilution refers to the reduction in energy dissipation from the contribution of a lossless potential that stores part of the elastic energy of mechanical resonators. The lossless potential may originate from e.g., a geometrical nonlinear deformation12. Such dissipation dilution could not explain our observations, since the small elastic energy increments are fully accounted for by the viscoelastic term ks in Eq. (1). However, due to a long viscoelastic relaxation time (τσs ≈ 104 s for drum 2) compared to the vibrational period ≈ 10−5 s, such a term can play a similar role as that of a nonlinear deformation to store elastic energy and contribute a “lossless" spring constant ks within the period of the oscillator. In order to provide an intuitive picture, we propose an extended KVM (Fig. 3c, top panel), where the intrinsic dissipation is modelled by a new dashpot (ηi) in parallel to the spring (k0) and viscoelastic dashpot (ηs) that have been introduced in Fig. 2b, but here ηs has been replaced by ks. The intrinsic Q can be defined by the material loss tangent, Qint = 1/tan(ϕ), where ϕ is the phase lag between stress and strain. Q is characterised by Q = DQ × Qint, where DQ = (1 + ks/k0) is called the dilution coefficient. Based on the outputs from KVM (see Fig. S7), DQ ≈ 1.06 is found for Vdc = −9.5 V as compared to Vdc = −6 V, which is less than the experimental DQ ≈ 1.20 (forward) and DQ ≈ 1.22 (backward), as shown in Fig. 3a.
We further estimate the impacts of ks on intrinsic damping rate Γ = f/Qint, which is not included in the conventional model of dissipation dilution12. The extracted Γ corresponding to Fig. 3b is shown in Fig. S10a. Notably, three drums in Device A follow a similar slope of ~ 3 kHz V−1. Intrinsic damping arises from the atomic-scale stick-slip behaviour that gives rise to friction. It is commonly interpreted by the Prandtl-Tomlinson model, where a particle is pulled by a linear spring of stiffness kd to slide on a periodic energy landscape (Fig. 3c, bottom panel). The stick-slip action only occurs if the corrugation registration energy is large enough, i.e., 2E0π2/kdb2 > 1, where E0 and b are the amplitude and period of the energy corrugation42. Otherwise, the stick-slip behaviour would undergo the transition to continuous motion without dissipation, thus reducing Γ. The viscoelastic stiffness ks creates a lateral, time-dependent heterostrain that makes the atom slide on a lattice (Fig. 3c, bottom panel), and as such can be considered as a driving kd. The sliding resistance can be reduced or even eliminated by increasing ks by Vdc, reinforcing the effect of dissipation dilution.
Our mechanism of reinforced viscoelastic dissipation dilution is markedly different from the electrical tuning of Q in nanotubes43,44. It is also different from the electrical tuning of Q in graphene due to Ohmic dissipation, where Q decreases as ∣Vdc∣ increases45. Because our measurements do not involve charge transport through the resonator, we believe that the phenomena we observe have a purely mechanical origin. Remarkably, a transition from the purely mechanical region with enhanced Q to the usual electrostatic region with decreased Q as increasing ∣Vdc∣ is revealed for with θ ~ 4° (Fig. 3d), with θ ~ 10. 5° (Fig. S16d) and another drum of θ ~ 12° (Device G) with a small built-in strain introduced by annealing (Fig. S8i). In fact, we can separate the dissipation as 1/Q = 1/Qnormal + 1/Qviscoelastic. Thus, if the normal term competes with the viscoelastic one, either by reducing ϵ0 as in Device G or by reducing viscosity in the case of a small twist angle (Device E), the electrostatic region with decreased Q returns.
To obtain the direct information on the dissipation dynamics, we further perform the ring-down measurements (see Methods) in drum 11 of Device E. The vibrational amplitude at resonant frequency decays exponentially in time as ∝ e−t/(2τ) upon stopping the drive, with τ the decay time constant, which gives Q = 2πfrτ. The energy decay traces (in log scale) corresponding to different Vdc are shown in Fig. 3e. Q obtained from the ring-down measurements is identical to the trajectory extracted by fitting of the mechanical responses (Fig. 3d). Further controlled ring-down measurements using gate voltage pulses or tiny ramps to capture the discrete Q jumps (as shown in Fig. 3b) are needed to elucidate the underlying mechanism.
Discussion
Finally, we discuss the origin of the viscoelasticity revealed in our TBG drums. For small θ, e.g., MA, the incommensurate lattice with neighbouring AA, AB, and BA stacking domains will spontaneously transform into a commensurate one by gaining interlayer interaction energy. Thus, they have to overcome a relatively large E0 in order to slide, similarly to commensurate AA- and AB-stacked bilayer graphene. By contrast, an incommensurate lattice can overcome E0 and easily enable interfacial sliding, up to the extreme of superlubricity. Thus, two MLG sheets in an incommensurate TBG with a twist angle between two extremes tend to behave individually, similarly to the molecular chains in a polymer.
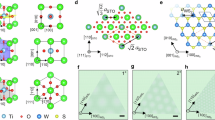
Figure 4a shows the prototypical nanofriction setup for Molecular dynamics (MD) simulations. Figure 4b shows that the predicted coefficient of friction (COF) from MD simulations (see Methods) decreases with increasing θ between 10° and 14°. Indeed, the butterfly-shaped hysteresis loops are more easily revealed on TBG with θ ~ 13. 5° (Fig. S8j), θ ~ 12° (Fig. S8f-h, i) than θ ~ 4° (Fig. S8c-e), θ ~ 1. 1° (Fig. S8k), θ ~ 0. 4° (Fig. S8b) in our studies. In particular, TBG with very small θ ~ 0. 4° (Fig. S8b) and the bilayer graphene (Fig. S8a) do not show any hysteresis loops, instead, they show a capacitive softening of their spring constant as ∣Vdc∣ is increased46. To obtain an intuitive picture, we further simulate the COF of TBG under heterostrain. The COF shows dual-scale oscillations due to both atomic and moiré-scale dual-periodic friction force as expected. More importantly, our simulation indicates that COF follows a linear decreasing trend with the applied heterostrain, which could explain the revealed linear trend in damping rates (Fig. S10a).

a Top view of prototypical nanofriction setup for Molecular dynamics (MD) simulations: a hexagonal AB-stacked bilayer graphene flake is sliding (as indicated by the red arrow) on a rectangular AB-stacked bilayer graphene substrate. b The coefficient of friction (COF) in the TBGs with 1% heterostrain as a function of twist angle, which follows a decreasing trend. The right axis shows the moiré wavevector q(θ). Inset: the moiré patterns formed by the twist angles of 10° and 14°. c COF as a function of time for the cases with no heterostrain 0%, 0.5% and 1% heterostrain cases under a normal force of 2 GPa for the TBG with θ ~ 11.64° (see Methods), showing the dual-scale oscillations. The dark-dashed line indicates the line cut for the extraction of the COF in (d). d Reduced COF with increasing heterostrain level, which follows a linear decreasing trend.
The observed transition from capacitive softening (bilayer graphene drum) to butterfly-shaped hysteresis loops (softening-to-butterfly transition) with increasing θ suggests that viscoelasticity in TBG is angle-dependent (see Fig. S8). We extend our KVM to include capacitive softening effects (see Methods) and reproduce this softening-to-butterfly transition as the strength of viscoelasticity (ηs) increases, as shown in Fig. 5. It directly introduces the twist angle as an effective knob that tunes viscoelasticity in moiré superlattices.

a–f The resonant frequency tuning calculated by KVM with capacitive softening (see Methods) as ηs increases from 0 to 4.5 × 1014 Pa s, which shows the transition from the capacitive softening to the butterfly-shaped hysteresis loop. The experimental butterfly loop in (e) is measured in drum 8 (D = 8 μm) of Device D with θ ~ 12°.
In conclusion, we report on viscoelasticity in TBGs with different misalignments. The viscoelasticity originates from sliding between two incommensurate layers. The resonant frequency loops show a strong dependence on gate voltage and are well reproduced by our viscoelastic model. The lateral, time-dependent stiffness resulting from the viscoelasticity contributes a “lossless" potential for mechanical vibrations and dramatically reduces the intrinsic damping rates, providing a remarkably high value of Q ~ 1900 at room temperature. The revealed viscoelasticity originates from interfacial sliding enabled by both an incommensurate lattice and a strong built-in strain.
Our work introduces twisted 2-D systems with rotational freedom as a platform for viscoelasticity engineering in ultra-thin membranes. The remarkably high Q make TBGs promising for the study of nanoscale friction and emergent nanoelectromechanical and spin-mechanical couplings. These are regularly achieved, by further increasing the drum size to increase Q and at cryogenic temperatures, or by tensioning twisted membranes based on microelectromechanical systems47. The embedded nature of nanomechanical resonators and their extreme sensitivity to the environments enable the study of correlated phase transition, atomic or lattice dynamics and thermodynamics. Going one step further, with the emergence of 2-D systems with robust magnetic order and topological phases48, we foresee new opportunities to explore and exploit viscoelastic properties, for example, to construct new generation of dynamically slippable microsystems49 and reconfigurable interfaces50.
Methods
Device fabrication
The TBG drumhead nanoelectromechanical resonators were prepared in two sequential parts, including the TBG flake preparation and deterministic transfer onto pre-patterned holes. A “tear-and-stack” method was used to obtain large TBG flakes: first, large monolayer graphene flakes were randomly deposited on 285 nm-SiO2/Si substrates, using a thermally assisted mechanical exfoliation scheme as described in ref. 51. The thickness of the graphene was confirmed by micro-Raman spectroscopy. The target flake is then rapidly cut into two halves of similar size using a diamond tip, of which one half is picked up either by a capillary force assisted wet transfer techniques52,53 or by a van der Waals force assisted dry transfer techniques. The wet transfer method: in practice, a polydimethylsiloxane (PDMS) stamp is first applied to the substrate with the contact boundary moving smoothly towards the cutting scratch, eventually covering half of the graphene flake. Care should be taken not to completely cover the scratch. A water droplet is injected from the side entrance of the substrate, spreads out and makes contact between the PDMS and another half graphene supported by capillary force, and finally dries naturally, while attaching the graphene flake to the PDMS stamp. This lifted graphene flake (PDMS/graphene) is then pressed onto the one left on the substrate at a specified angle of rotation by a high-precision rotary stage, which removes the attached graphene and deposits a TBG flake on the substrate. In the second part, another PDMS stamp picks up the stacked flake and deposits it onto a pre-patterned substrate that has been treated with oxygen plasma to increase adhesion. The dry transfer method: one sizeable h-BN flake with a well-defined window is used to successively pick up two halves of the graphene flake and then deposits it onto a pre-patterned substrate (Fig. S4d). The pattern is created by optical lithography followed by reactive ion etching and consists of hole arrays (4, 6, 8, 10, and 12 μm in diameter and 250 ± 5 nm in depth) completely separated or connected by 1 μm-wide ventilation channels (Supplementary Section S1.1). Ti(5 nm)/Au(45 nm) contacts close to hole arrays are evaporated by electron beam. We have carefully optimised the entire fabrication process to minimise ripping and crumpling effects, as evidenced by the moderate Q found on TBG drums with different twist angles and good surface quality measured by atomic force microscopy (Fig. S4).
Optomechanical measurements
Electrically connected TBG drums are mounted in a vacuum chamber (6 × 10−6 mbar). The drum arrays are capacitively driven using the heavily n-type doped Si wafer as a backgate, and a time-dependent gate bias \({V}_{{{{\rm{g}}}}}(t)={V}_{{{{\rm{dc}}}}}+{V}_{{{{\rm{ac}}}}}\cos \Omega t\) is applied as described in the main text. The electrostatic force applied is given by \({F}_{{{{\rm{el}}}}}={\epsilon }_{{\rm{v}}}\pi {D}^{2}{V}_{{{{\rm{g}}}}}^{2}\left(t\right)/8{d}^{2}\left(\xi \right)\), where D is the diameter of the drum, ϵv is the vacuum dielectric constant, \(d\left(\xi \right)=({d}_{{{{\rm{vac}}}}}-\xi )+{d}_{{{{{\rm{SiO}}}}}_{2}}/{\epsilon }_{{{{{\rm{SiO}}}}}_{2}}\) is the effective distance between the TBG drum and the Si substrate, where ξ is the static displacement at the centre of the drum, dvac is the distance between the TBG drum and SiO2 in the absence of any gate bias, \({d}_{{{{{\rm{SiO}}}}}_{2}}\) is the thickness of the residual SiO2 layer. This force includes a static component proportional to \({V}_{{{{\rm{dc}}}}}^{2}\), which determines the value of ξ, and a harmonic driving force proportional to \({V}_{{{{\rm{dc}}}}}{V}_{{{{\rm{ac}}}}}\cos \left(\Omega t\right)\). Note that since \({V}_{{{{\rm{ac}}}}}\ll \left\vert {V}_{{{{\rm{dc}}}}}\right\vert\), we can safely neglect the force \(\propto {V}_{{{{\rm{ac}}}}}^{2}\left(1+\cos \left(2\,\Omega t\right)\right)\) throughout our analysis. At the same time, we always use a low drive power to avoid any vibration nonlinearities (Supplementary Section S6). A 632.8 nm He-Ne continuous wave laser with a power of ~ 150 μW is focused onto a ~ 1.2 μm-diameter spot and is used for optomechanical measurements. The opto-thermal effects on Q are safely excluded by measuring at different laser powers (Supplementary Section S7). Unless otherwise stated, measurements are made at the centre of the drum. The beam reflected from the cavity of Si/SiO2/vacuum/TBG layered geometry is detected by an avalanche photodiode. In the driven regime, the mechanical amplitude at f = Ω/2π is readout using a lock-in amplifier. The values of fr and Q are extracted by fitting the mechanical response with linear response theory of a driven harmonic oscillator. The amplitude (z0) of mechanical displacement z = z0ei2πft is expressed as35
where \({\tilde{F}}_{{{{\rm{el}}}}}\) is the effective applied electrostatic force, meff is the effective mass density which takes into account the shape of the vibrational mode54. Note that the formal data collection on the TBG drums without any ventilation channels was performed after waiting more than five days and continuing for two or three weeks.
Sweeping measurements
An automatic programme based on Python is launched to perform the forward and backward sweeps, implemented on a lock-in amplifier. The forward-then-backward, backward-then-forward, and multiple sweep functions are constructed by specific scripts. By default, the program creates a time interval when the sweep direction is changed. The specific step size is defined by the program. To calculate the step rates, we divide the total run time by the specified step size, which is further cross-checked by the time it takes to run a frequency sweep process on the lock-in amplifier with the same configurations. Note that we do not set up the initial state by program, instead, we manually change the applied Vdc with a small step size (typically, of 0.1 V), to avoiding collapsing TBG drums (especially those with D = 12 μm, see Supplementary Section S1.2) and to allow the dynamic system to reach a steady state before loading any sweep programs.
Optical micro-spectroscopy
Raman spectra are recorded on our custom-designed SmartRaman system, which uses a 550 mm monochromator equipped with an 1800 grooves/mm grating, coupled to a cooled CCD array. The Raman signals excited at 632.8 nm or 532 nm are filtered using ultra-steep long-pass edge filters. The laser power is kept below ~ 0.4 mW to avoid any heating of the sample. The Raman \({{{{\rm{R}}}}}^{{\prime} }\) mode and G mode spectra are fitted with a Lorentzian function. The value of θ can be estimated directly from the frequency of the \({{{{\rm{R}}}}}^{{\prime} }\) mode whose involved phonon momentum \(q(\theta )=\frac{8\pi }{\sqrt{3}a}\sin (\frac{\theta }{2})\), where a is the lattice parameter of graphene. Raman enhancements due to the van Hove singularities in the conduction and valence bands occur at the critical twist angle \({\theta }_{{{{\rm{C}}}}}=\frac{3a{E}_{L}}{\hslash {\upsilon }_{F}4\pi }\), where υF is the Fermi velocity in monolayer graphene, EL excitation energy55. For an excitation of 532 nm (632.8 nm), θC ~ 12. 3° (10.3°). So we use 632.8 nm excitation for spectra measurements on TBGs with θ ~ 10°, and 532 nm for TBGs with θ ~ 12° and θ ~ 13. 5°. In addition, the Raman intensity of the G mode is designed to increase monotonically as the membrane moves towards the bottom of the holes (see Supplementary Section S1.1). Thus, the detected ~ 10% decrease in Raman G mode intensity can be attributed to the small changes in twist angle which keeps away from θC. In fact, an increasing trend in Raman G mode intensity was observed for TBG with θ ~ 10. 5° (Fig. S16b) and the as-annealed TBG with θ ~ 12° (Fig. S3c).
Ring-down measurements
The ring-down measurements were performed with a dual-channel (CH1 and CH2) arbitrary waveform generator (AWG). A burst signal from the external triggered burst mode in CH1 with the carrier frequency same to the resonant frequency is used to drive the mechanical resonator. CH2 is used to provide a square wave (typically 1 kHz with a 50% duty cycle) as the external trigger for both CH1 and an oscilloscope (with a sampling rate of 5 GSa s−1). We also used a low-noise amplifier (voltage gain of 125, noise figure of 1 dB) to amplify the output voltage of the avalanche photodiode. We first run a backward voltage sweep starting at Vdc = 0 V, with a typical step size of -0.25 V, from which Q is extracted by fitting the mechanical responses. The same Vdc history is required for comparison with the ring-down measurement (Fig. 3e). Therefore, we gradually recovered to Vdc = 0 V and waited an hour or two before performing the ring-down measurement. In the meantime, we keep the same time interval in the ring-down measurement as in the gate voltage sweeps. The time traces recorded by the oscilloscope are further field averaged 2048 times. To extract the envelope of the averaged traces, a bandpass filter (with a bandwidth of 400 kHz) is applied, followed by a standard low-pass filtering of the vibration power. The vibrational amplitude decays exponentially in time as ∝ e−t/(2τ), where τ is the decay time constant, yielding Q = 2πfrτ. Note that we use vibrational amplitude field averaging rather than offline post-power averaging56, which may account for the offset shown in Fig. 3d.
Viscoelasticity modelling
The drumhead resonator is modelled as a pre-tensioned, suspended membrane resonator with fixed boundaries and a parabolic mode shape. The strain at membrane deflection is therefore given by \(\epsilon={\epsilon }_{0}+\frac{{z}^{2}}{4}\), where z = ξ/D is the dimensionless deflection at the centre of the drum. The corresponding stress is related to strain by a Kelvin-Voigt constitutive relation, \(\sigma=E\epsilon+\eta \frac{{{{\rm{d}}}}\epsilon }{{{{\rm{d}}}}t}\), where E is Young’s modulus and η is viscosity coefficient. The total mechanical energy of the membrane is defined by \({U}_{{{{\rm{tot}}}}}=\frac{V}{2}\sigma \cdot \epsilon\), where V is the total volume of the TBG drum, from which the restoring force is further obtained by \({F}_{{{{\rm{res}}}}}=-\frac{1}{D}\cdot \frac{\partial {U}_{{{{\rm{tot}}}}}}{{{{\rm{\partial }}}}z}\). Together with the electrostatic pressure Fel introduced above, the dynamical equation for z can be constructed by:
where meff is the effective mass density account for the mode profile of fundamental resonance in a rigidly clamped circular drum54, τσ = η/E is the viscoelastic relaxation time. The corresponding resonant frequency is given by Eq. (1) in the main text, which is calculated by the output parameters from the numerical solution of the above dynamical equation. Here ϵ0 and η are the only two free parameters to fit the experimental frequency loops.
The effect of capacitive softening induced by Fel46 on the model is further included by replacing \({F}_{{{{\rm{el}}}}}(1+\frac{2D}{d}z)\) in Eq. (3). Accordingly, the resonant frequency is expressed as:
with the capacitive softening term \({k}_{{{{\rm{c}}}}}=\frac{8{F}_{{{{\rm{el}}}}}{D}^{2}}{EVd}\). It will reduce to the usual expression for capacitive softening if ks = 0, that is, no viscosity.
Molecular dynamics simulations
MD simulations are performed using the LAMMPS package. The TBG system consists of a rectangular AB-stacked bilayer graphene substrate and a hexagonal AB-stacked bilayer graphene flake. We set the twist angle between the substrate and the flake to 11.64°, i.e., the twist angle of bilayer graphene θTBG ~ 11.64°, which is close to the experiment. Uniaxial-strain of 0%, 0.5%, 1% is applied to the substrate by changing the coordinates of the carbon atoms to study the effect of heterostrain on the TBG system. The intralayer C-C interactions of graphene are described by the reactive empirical bond order potential, while the interlayer interaction described by the Kolmogorov-Crespi potential57,58. To investigate the stable state of the TBG system, we first relax the system out-of-plane while keeping the time-dependent size fixed to maintain the heterostrain. The system is relaxed with an NVT ensemble for 50 ps at a constant temperature of 0.1 K. A load of 2 GPa is then applied to the top layer of the flake to ensure stable contact. The bottom layer of the substrate is fixed and the flake moves along the x-direction with a driving speed of 10 m s−1 provided by the top layer of the flake to mimic the interlayer sliding of TBG. The sliding process is simulated at a temperature of 0.1 K.
Reporting summary
Further information on research design is available in the Nature Portfolio Reporting Summary linked to this article.
Data availability
The data that support the findings of this study are openly available on Zenodo at https://doi.org/10.5281/zenodo.15098766. Additional data are available from the corresponding author upon reasonable request.
References
Lakes, R. S.Viscoelastic Materials (Cambridge University Press, Cambridge, 2009).
Aklonis, J. J. & MacKnight, W. J. Introduction to Polymer Viscoelasticity, 3rd ed. (Wiley-Interscience, Hoboken, N.J, 2005).
Chaudhuri, O., Cooper-White, J., Janmey, P. A., Mooney, D. J. & Shenoy, V. B. Effects of extracellular matrix viscoelasticity on cellular behaviour. Nature 584, 535 (2020).
Li, X. & Gong, J. P. Design principles for strong and tough hydrogels. Nat. Rev. Mater. 9, 380 (2024).
Suhr, J., Koratkar, N., Keblinski, P. & Ajayan, P. Viscoelasticity in carbon nanotube composites. Nat. Mater. 4, 134 (2005).
Bunch, J. S. et al. Electromechanical resonators from graphene sheets. Science 315, 490 (2007).
Chen, C. et al. Graphene mechanical oscillators with tunable frequency. Nat. Nanotechnol. 8, 923 (2013).
Bachtold, A., Moser, J. & Dykman, M. I. Mesoscopic physics of nanomechanical systems. Rev. Mod. Phys. 94, 045005 (2022).
Xu, B. et al. Nanomechanical resonators: Toward atomic scale. ACS Nano 16, 15545 (2022).
Steeneken, P. G., Dolleman, R. J., Davidovikj, D., Alijani, F. & van der Zant, H. S. J. Dynamics of 2D material membranes. 2D Mater. 8, 042001 (2021).
Ferrari, P. F., Kim, S. & van der Zande, A. M. Nanoelectromechanical systems from two-dimensional materials. Appl. Phys. Rev. 10, 031302 (2023).
Engelsen, N. J., Beccari, A. & Kippenberg, T. J. Ultrahigh-quality-factor micro- and nanomechanical resonators using dissipation dilution. Nat. Nanotechnol. 19, 725 (2024).
Bistritzer, R. & MacDonald, A. H. Moiré bands in twisted double-layer graphene. Proc. Natl. Acad. Sci. USA 108, 12233 (2011).
Yankowitz, M. Unravelling the magic of twisted trilayer graphene. Nat. Mater. 22, 286 (2023).
Cao, Y. et al. Unconventional superconductivity in magic-angle graphene superlattices. Nature 556, 43 (2018).
Yankowitz, M. et al. Tuning superconductivity in twisted bilayer graphene. Science 363, 1059 (2019).
Lu, X. et al. Superconductors, orbital magnets and correlated states in magic-angle bilayer graphene. Nature 574, 653 (2019).
Sharpe, A. L. et al. Emergent ferromagnetism near three-quarters filling in twisted bilayer graphene. Science 365, 605 (2019).
Seyler, K. L. et al. Signatures of moiré-trapped valley excitons in MoSe2/WSe2 heterobilayers. Nature 567, 66 (2019).
Tran, K. et al. Evidence for moiré excitons in van der Waals heterostructures. Nature 567, 71 (2019).
Jin, C. et al. Observation of moiré excitons in WSe2/WS2 heterostructure superlattices. Nature 567, 76 (2019).
Wang, L. et al. Correlated electronic phases in twisted bilayer transition metal dichalcogenides. Nat. Mater. 19, 861 (2020).
Woods, C. R. et al. Commensurate–incommensurate transition in graphene on hexagonal boron nitride. Nat. Phys. 10, 451 (2014).
van Wijk, M. M., Schuring, A., Katsnelson, M. I. & Fasolino, A. Relaxation of moiré patterns for slightly misaligned identical lattices: Graphene on graphite. 2D Mater. 2, 034010 (2015).
Zhang, S. et al. Domino-like stacking order switching in twisted monolayer–multilayer graphene. Nat. Mater. 21, 621 (2022).
Wang, J., Khosravi, A., Vanossi, A. & Tosatti, E. Colloquium: Sliding and pinning in structurally lubric 2D material interfaces. Rev. Mod. Phys. 96, 011002 (2024).
Ahn, S. J. et al. Dirac electrons in a dodecagonal graphene quasicrystal. Science 361, 782 (2018).
Hod, O., Meyer, E., Zheng, Q. & Urbakh, M. Structural superlubricity and ultralow friction across the length scales. Nature 563, 485 (2018).
Dienwiebel, M. et al. Superlubricity of graphite. Phys. Rev. Lett. 92, 126101 (2004).
Han, E. et al. Ultrasoft slip-mediated bending in few-layer graphene. Nat. Mater. 19, 305 (2020).
Liao, M. et al. Uitra-low friction and edge-pinning effect in large-lattice-mismatch van der Waals heterostructures. Nat. Mater. 21, 47 (2022).
Rejhon, M. et al. Relation between interfacial shear and friction force in 2D materials. Nat. Nanotechnol. 17, 1280 (2022).
Banerjee, A. et al. Superfluid stiffness of twisted trilayer graphene superconductors. Nature 638, 93 (2025).
Tanaka, M. et al. Superfluid stiffness of magic-angle twisted bilayer graphene. Nature 638, 99 (2025).
Zhang, X. et al. Dynamically-enhanced strain in atomically thin resonators. Nat. Commun. 11, 5526 (2020).
Lifshitz, R. & Cross, M. C. Nonlinear dynamics of nanomechanical and micromechanical resonators, in Reviews of Nonlinear Dynamics and Complexity (John Wiley & Sons, Ltd, 2008) Chap. 1, pp. 1–52.
Ying, Y. et al. Sliding nanomechanical resonators. Nat. Commun. 13, 6392 (2022).
Wang, G. et al. Measuring interlayer shear stress in bilayer graphene. Phys. Rev. Lett. 119, 036101 (2017).
Sun, Y. et al. Determining the interlayer shearing in twisted bilayer MoS2 by nanoindentation. Nat. Commun. 13, 3898 (2022).
Barton, R. A. et al. High, size-dependent quality factor in an array of graphene mechanical resonators. Nano Lett. 11, 1232 (2011).
Zhang, S. et al. Dual-scale stick-slip friction on graphene/hBN moiré superlattice structure. Phys. Rev. Lett. 128, 226101 (2022).
Socoliuc, A., Bennewitz, R., Gnecco, E. & Meyer, E. Transition from stick-slip to continuous sliding in atomic friction: Entering a new regime of ultralow friction. Phys. Rev. Lett. 92, 134301 (2004).
Steele, G. A. et al. Strong coupling between single-electron tunneling and nanomechanical motion. Science 325, 1103 (2009).
Lassagne, B., Tarakanov, Y., Kinaret, J., Garcia-Sanchez, D. & Bachtold, A. Coupling mechanics to charge transport in carbon nanotube mechanical resonators. Science 325, 1107 (2009).
Song, X. et al. Stamp transferred suspended graphene mechanical resonators for radio frequency electrical readout. Nano Lett. 12, 198 (2012).
Weber, P., Güttinger, J., Tsioutsios, I., Chang, D. E. & Bachtold, A. Coupling graphene mechanical resonators to superconducting microwave cavities. Nano Lett. 14, 2854 (2014).
Wopereis, M. P. F. et al. Tuning dissipation dilution in 2D material resonators by MEMS-induced tension. J. Appl. Phys. 136, 014302 (2024).
Gibertini, M., Koperski, M., Morpurgo, A. F. & Novoselov, K. S. Magnetic 2D materials and heterostructures. Nat. Nanotechnol. 14, 408 (2019).
Huang, X. et al. Microscale schottky superlubric generator with high direct-current density and ultralong life. Nat. Commun. 12, 2268 (2021).
Koren, E. et al. Coherent commensurate electronic states at the interface between misoriented graphene layers. Nat. Nanotechnol. 11, 752 (2016).
Huang, Y. et al. Raman spectral band oscillations in large graphene bubbles. Phys. Rev. Lett. 120, 186104 (2018).
Ma, X. et al. Capillary-force-assisted clean-stamp transfer of two-dimensional materials. Nano Lett. 17, 6961 (2017).
Hou, Y. et al. Preparation of twisted bilayer graphene via the wetting transfer method. ACS Appl. Mater. Interfaces 12, 40958 (2020).
Davidovikj, D. et al. Visualizing the motion of graphene nanodrums. Nano Lett. 16, 2768 (2016).
Pandey, V. et al. Probing interlayer interactions and commensurate–incommensurate transition in twisted bilayer graphene through Raman spectroscopy. ACS Nano 18, 4756 (2024).
Güttinger, J. et al. Energy-dependent path of dissipation in nanomechanical resonators. Nat. Nanotechnol. 12, 631 (2017).
Brenner, D. W. et al. A second-generation reactive empirical bond order (rebo) potential energy expression for hydrocarbons. J. Phys.: Condens. Matter 14, 783 (2002).
Kolmogorov, A. N. & Crespi, V. H. Registry-dependent interlayer potential for graphitic systems. Phys. Rev. B 71, 235415 (2005).
Acknowledgements
We thank F. N. Chen and H. Lu for their help in the exploration of ring-down measurements. This work is supported by the National Natural Science Foundation of China (Grant No. 12174381). X.Z. acknowledges support from the CAS BR Scholar project, Young Science and Technology Talent Promotion Program funded by Institute of Semiconductors, Beijing Natural Science Foundation (Grant No. Z220005), and CAS Project for Young Scientists in Basic Research (Grant No. YSBR-030). P.T. acknowledges support from the National Natural Science Foundation of China (Grant Nos. 12127807, 12393832). J.M. acknowledges support from the National Natural Science Foundation of China (Grant Nos. 62150710547, 62074107). A.S. and T.M. acknowledges support from the National Natural Science Foundation of China (Grant Nos. 52225502, 52305200, 52363033). Z.Z. and X.S. acknowledges support from the National Natural Science Foundation of China (Grant Nos. 12274397, 12274401), the National Key Research and Development Program of China (Grant No. 2022YFA1405900). G.D. acknowledges support from the National Natural Science Foundation of China (Grant No. 12074058), the National Key Research and Development Program of China (Grant No. 2022YFA1405900).
Author information
Authors and Affiliations
Contributions
Q.Z., G.S., and A.S. contributed equally to this work. X.Z. designed the research project and built the experimental setup. Q.Z., G.S., X.M. and X.Z. fabricated the samples. X.Z., Q.Z., and G.S. carried out optomechanical, the ring-down, and micro-Raman spectroscopy measurements. X.Z., Q.Z., P.T., and G.S. analysed the data with input from J.M., Y.Y., Z.Z., and X.S. A.S., Z.X., and T.M. performed the molecular dynamic simulations. X.Z. and J.M. wrote the manuscript with input from Q.Z., G.S., A.S., X.M., Y.Y., G.D., and P.T. P.T. and X.Z. supervised the project.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks the anonymous, reviewer(s) for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zeng, QY., Su, GX., Song, AS. et al. High-quality-factor viscoelastic nanomechanical resonators from moiré superlattices. Nat Commun 16, 3793 (2025). https://doi.org/10.1038/s41467-025-58981-2
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41467-025-58981-2
