
Abstract
Switchable between 2D and 3D forms, origami and kirigami have emerged as a versatile platform for deformable optoelectronic devices. Unlike electronic devices, whose electrical properties remain largely unchanged during transformation, the optoelectronic properties of these systems can vary significantly, offering opportunities for optical tunability but also introducing design challenges. Developing such devices requires careful consideration of electrical, mechanical, and optical factors. This perspective organizes these complex considerations, summarizes key advances and remaining challenges, and outlines design strategies to guide future development, highlighting how origami and kirigami can expand the functionality and potential of optoelectronic systems.
Similar content being viewed by others


Introduction
Origami and kirigami are traditional art forms that transform two-dimensional (2D) flat structures into three-dimensional (3D) volumetric forms by forming folding lines and cutting lines, respectively, on flat sheets. Historically, research has focused on creating various structures and designing kinematic behavior using thin pieces of paper, with the field growing through a multitude of mathematical and geometrical explorations1,2. As theoretical understanding has deepened, engineers have utilized origami-based substrates to create deployable structures that maximize space efficiency, such as those used in satellites and solar panels3,4,5. Kirigami-based substrates, on the other hand, have been applied mainly to conform to various curved surfaces or to leverage mechanical stretchability. These unique capabilities and growing interest in adaptable forms of devices – such as conformable devices for internet of things (IOTs) and deformable devices for wearable applications – have elevated them from mere art forms to key building blocks for emerging engineering applications6,7,8.
In these respects, origami/kirigami engineering has evolved beyond merely designing substrate structures to integrating electronic devices and circuits onto these substrates, forming the core framework of free-form electronics that provides unconventional functionalities or solves unmet challenges associated with deformation. Representative examples include advancements made in wearable electronics9, shape-morphing electronics10, bioelectronics11,12, and soft robotics13,14. More recently, it has been widely explored for optoelectronic devices used in cutting-edge industries, such as solar cells15,16, displays17,18, optical sensors19,20, 3D optical systems21,22, and phototherapy devices23. This has led to the emergence of a new research field known as origami/kirigami optoelectronics, which continues to gain significant attraction and interest from both academia and industry.
While origami/kirigami engineering7,8,24,25,26,27 has already been extensively covered in numerous review articles, an overview focusing primarily on its application to optoelectronics remains scarce, despite growing interest and rapid progress being made in this field. Chen et al. focus on the fabrication of nanoscale origami/kirigami structures and their photonic applications28, and Kim et al. mainly describe manufacturing challenges for deformable displays29. While these works provide valuable insights, neither offers a unified framework linking mechanical deformation to optical performance across the wide range of optoelectronic applications and scales or connects past and existing developments to future strategies. This work differs from those in that it integrates strategies spanning micro/nano- to macroscale, classify devices into adaptable, expandable/stretchable, and optically tunable categories, and address design principles that simultaneously consider electrical, mechanical, and optical constraints. In addition, we present a historical timetable of origami/kirigami-based optoelectronics (Box 1) and propose a forward-looking roadmap to guide both fundamental research and practical implementation.
Unlike conventional flexible or stretchable optoelectronics, origami- and kirigami-based devices exploit deterministic folding and cutting patterns, which provide unique opportunities such as programmable geometric reconfiguration and conformability to complex three-dimensional surfaces. At the same time, these structural motifs introduce distinct challenges, including mechanical reliability at crease regions and the need for precise control over folding trajectories. Therefore, the design process could become challenging and necessitate the simultaneous and rigorous consideration of both electrical and optical parameters as well as mechanical factors.
In this Perspective Article, we provide an overview of various advances made in origami/kirigami optoelectronic devices, discuss on core challenges, and try to establish a design flow based on optical, mechanical, and actuation strategies to cope with those obstacles. To this end, we first classify origami/kirigami optoelectronic devices into three main categories - adaptable, expandable/stretchable, and optically tunable - based on their applications. Each application is then further divided into six sub-categories according to the types of optoelectronic devices, with corresponding case studies presented and evaluated based on their mechanical and optoelectronic performance. For each of the applications, basic design criteria and considerations are presented, and the key challenges are identified along with examples of efforts made to address these issues. Potential solutions to the remaining problems are further discussed, providing insights into future directions to unlock their full potential in optoelectronic applications.

Overview of origami and kirigami technologies and their application to optoelectronics
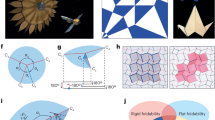
With pre-assigned folding lines (origami, kirigami) and cutting lines (kirigami), transformation from 2D configurations into 3D structures becomes readily possible, accommodating mechanical deformations that may be either static or dynamic. (Fig. 1) In the case of the origami structure, the geometry of sub-regions can be determined by defining the location and angles of the fold lines. Subsequently, the main fold lines are defined by adjusting the folding angles and sequences of sub-regions, and these kinematic consistencies form the basis for canonical patterns such as miura-ori4,30,31, kresling32, and resch designs33,34. Kirigami patterns (e.g., checkerboard patterns35, ribbon patterns, and hexagonal patterns36) further utilize the flexibility of sub-regions divided by cut lines to transform into 3D structures with more advanced functionalities, yet require a well-curated balance between the amount of material removed and the material strength. By quantitatively controlling the degrees of freedom (DOF), one can create highly deformable structures, which can adapt to a surface with positive Gaussian curvature6 or expand into complex configurations37,38,39.

Origami utilizes folding lines, while kirigami incorporates both folding and cutting lines for structural transformation. Classification by applications and major types of devices are shown for those popular in origami/kirigami optoelectronics. (Fig. 1 is adapted with permission from ref. 35, copyright 2015, Elsevier, / ref. 36, copyright 2021, Elsevier).
Upon adopting modern fabrication technologies such as micro-patterning24,28 or 3D printing techniques40,41,42, cutting patterns can be developed with a higher precision, which allows for a sophisticated yet deterministic control over the target structures, mode and range of deformation, and functionality, expanding their application scope to a substantial degree. In addition, it has been reported that the selective use of soft materials at fold lines, where significant mechanical deformation occurs repeatedly, can improve the overall mechanical stability43,44,45,46. These advances have made origami/kirigami technologies be perceived as feasible platform technologies for optoelectronic devices, which require a fine coordination among mechanical, electrical, and visual properties.
Origami/kirigami approaches are regarded particularly beneficial for optoelectronics in the following three represented forms: (i) adaptable devices19,20,47,48,49, which enable coverage of optoelectronic devices over 3D objects of various shapes; (ii) expandable and stretchable devices17,18,29,50,51, which maximize space utilization by folding, unfolding, or stretching the optoelectronic systems; and (iii) optical property-tunable devices52,53,54,55,56, which control optical characteristics through planned mechanical modulation of the overall structure and geometry. The first two types are especially relevant in light-emitting and light-receiving devices such as displays and image sensors/ solar cells, respectively, both of which are essentially large-area devices, where one-unit element (e.g., LEDs or photodiodes) or an array of unit elements are distributed over a large area, in contrast to semiconductor chips, wherein numerous elemental devices (e.g., transistors) are integrated at a very high density onto a very small footprint. In the case of the optical property-tunable devices, mechanical deformation of the system can provide electromagnetic wave control in applications related to reflectance, transmittance, and absorbance. While it sounds very basic, this mechanical deformation has demonstrated significant potential in advanced photonics applications. In laser21 and resonator systems57, it facilitates the formation of optical cavity-based systems and allows precise tuning of optical resonance conditions through rotational adjustment. In the following three sections, advances made in origami/kirigami optoelectronic devices are reviewed according to the three key types mentioned above, and their current limitations, as well as strategies to overcome these challenges, are discussed.
Highly adaptable object-integrated device
Origami and kirigami exhibit extraordinary shape morphability, enabling them to adapt to a wide range of complex surfaces, including those with arbitrarily curved shapes, and dynamically changing environments. (Fig. 2) This capability of shape morphing and its resultant curvy-surface adaptability can enable conformal optoelectronic devices such as body-attachable displays or IOT-type surface-integrated optoelectronic devices. Similar to bioinspired 3D flexible devices and functional systems that conform to natural curvatures in biological tissues58, architectures provide a powerful strategy for integrating electronics onto non-developable surfaces. Moreover, their adaptability also resonates with advances in biomimetic optoelectronics, where nanomaterials have been engineered to replicate visual functionalities for artificial vision59, further underscoring the potential of these structures in bridging biology-inspired concepts with next-generation optoelectronics.

a Computational wrapping enables precise design and simulation of origami optoelectronic devices, allowing them to conform to complex 3D surfaces. This technique optimizes the folding patterns and cutting lines to ensure functionality and adaptability in dynamic environments. b Kirigami patterns, such as auxetic designs, enable devices to conformally adhere to curved surfaces. These patterns allow for flexibility and expansion, ensuring that the device maintains its functionality and integrity on complex geometries. c Classification of devices based on cell area (Acell) and substrate thickness (tsub). As the Acell decreases and the tsub becomes thinner, higher adaptability is observed. ν represents the Poisson’s ratio. The black triangles, gray squares, and light-blue circles represent non-stretchable structures, auxetic structures, and island–interconnector structures, respectively. d Advanced material-assisted shape morphing using self-healing materials and shape-memory materials allows for flexible control of surface attachment. (Fig. 2a is adapted with permission from ref. 60, copyright 2022, American Association for the Advancement of Science and under CC BY 4.0 license from ref. 19. Figure 2b is adapted with permission under CC BY 4.0 license from ref. 69. Figure 2c is reproduced with permission under CC BY 4.0 license from refs. 19,20,63,70 and from ref. 23, copyright 2024, Wiley, ref. 67, copyright 2008, Springer Nature, ref. 49, copyright 2013, Springer Nature, ref. 62, copyright 2021, Springer Nature, ref. 64, copyright 2022, Wiley, ref. 65, copyright 2022, Wiley, ref. 66, copyright 2022, IEEE, ref. 71, copyright 2018, Wiley. Figure 2d is adapted with permission from ref. 73, copyright 2022, Wiley, ref. 74, copyright 2002, Wiley).
The shape-morphing capability is further leveraged through the development of computational wrapping techniques, which facilitate precise design and simulation for 3D curved surfaces. Incorporation of kirigami-assisted adaptive designs enhances their morphing capability. When combined with self-healing materials or shape-memory mechanisms, these structures further improve the reliability, flexibility, and adaptability of conformal devices, thereby broadening their potential applications.
Computational wrapping
When using simple sheets without integrated devices, there are various origami approaches such as origami tessellations (Miura-ori, waterbomb base, Ron Resch, Freeform Origami method, vertex method, trapezoidal crease patterns), tucking molecules, curved-crease origami, and concentric pleating, as well as kirigami approaches like lattice kirigami and kirigami-engineered elasticity7. They have been used to optimize the folding patterns and cutting lines of conventional material sheets that have no inherent deformability. These techniques ensure functionality and adaptability on cylindrical (K = 0; K: Gaussian curvature), spherical (K > 0), saddle (K < 0), and irregular surfaces (random K) as well as in dynamic environments6. In addition, inspired by biological materials such as nacre, which comprises multiple mineral tablets bound by an organic matrix, a wrapping methodology has been reported for creating mechanically robust multilayer structures with non-overlapping cutting lines that completely cover target surfaces60.
In the field of computer graphics, numerous algorithms have been developed for wrapping curved surfaces in a seamless fashion. (Fig. 2a) For instance, methods such as steepest edge, flat-tree, unflat tree, genetic algorithm, minimum perimeter, and maximum perimeter have been used to generate meshes, allowing for the creation of non-polyhedral nets developable with single connectivity and no crease lines for constructing electroluminescence (EL) panels47.
Polygon-cut kirigami units can adapt, even without complex mesh generation, to specific curved surfaces through geometric transformations like folding. This approach has been shown to enable their use as bio-inspired devices and adaptive optical elements. For example, a study demonstrated an adaptive electronic eye system by converting high-performance silicon photodetectors into spherical or hemispherical configurations using a truncated icosahedron-based polygon block structure. This system featured an imaging setup combined with lenses that minimized optical distortion20. Another example is a bio-inspired device that mimics the human retina using an ultrathin MoS2-graphene curved photodetector array. This device was combined with plano-convex lenses to optically manipulate images. It achieved both biocompatibility and mechanical deformability due to its ultrathin structure19. Furthermore, research on the face-fit surface lighting μLED (FSLED) mask successfully combined 3D origami-kirigami structures to achieve adaptable facial contact and uniform light exposure23.
While computational wrapping offers universal adaptability to arbitrary curved surfaces through mathematical techniques, implementing optoelectronic devices could present challenges. Without dedicated seams to relieve stress, the edges between mesh segments of nonstretchable substrates undergo slight bending. Stress concentration particularly occurs at vertex61, which could lead to device failure. This increases the difficulty of implementing optoelectronic devices, resulting in a limited number of reported examples to date.
Kirigami-assisted adaptive design: Poisson’s ratio engineering
Poisson’s ratio (ν), defined as the negative ratio of the transverse strain and longitudinal strain, is a key parameter to consider in adaptive design over 3D objects with non-Gaussian surfaces (K ≠ 0). For example, most materials, including flat sheets and elastomers, have a positive Poisson’s ratio ranging from 0 to 0.5. In this case, when stretched in a horizontal direction, the material contracts in a vertical direction or crumples, limiting its ability to conform seamlessly to complex curved surfaces, thereby restricting its adaptability in applications requiring high surface conformity. By introducing cutting lines to create kirigami patterns or incorporating kirigami-structured interconnectors, materials can be engineered to exhibit either negative (‘auxetic’) or zero Poisson’s ratio so that devices may conform adaptively to various target surfaces. (Fig. 2b).
Among various auxetic structures, so-called rigid rotating structures were found useful in reducing stress concentration at hinge parts. Being classified as ‘island-bridge type’, these structures enable mechanically reliable and adaptable optoelectronic devices, yet provide a means to maintain high performance by placing optoelectronic active elements to rigid islands. Figure 2c includes several notable examples, such as the optimization of geometrical factors in bar-type structures to realize a human-eye-inspired, shape-adaptive imager62. In other examples, these approaches were employed in an adaptive curved display by introducing vertical interconnects between cells63 and in an adaptable meta display by minimizing stress concentration at hinges through specific curvature and thickness designs in its geometry64. In addition to optimizing the geometric factors of hinges, conductive elastomers were also employed as soft hinges to suppress the out-of-plane buckling issue, a longstanding problem in auxetic structures, while improving surface conformability in displays65.
Some ideal island-interconnector structures can feature a near-zero Poisson’s ratio, as also shown in Fig. 2b. Examples of interconnector engineering include linking photovoltaic cells with bar-type interconnectors into a Lego®-style assembly module66, mimicking hemispherical electronic eye cameras through compressive buckling67, and implementing digital cameras inspired by arthropod eyes using serpentine-shaped interconnectors with high stretchability49.
Linear cut-unit kirigami structures can also exhibit near-zero Poisson’s ratios and propose a programmable universal morphing strategy with a high degree of freedom DOF68,69. When applied to an array of LEDs, these structures were shown to allow for biaxial stretchability, key to adaptable displays70. Combined with origami structures, they were adopted for the creation of aesthetic organic light-emitting diode (OLED) devices71.
Figure 2c classifies optoelectronic devices with Poisson’s ratio engineering achieved through kirigami approaches according to substrate thickness (tsub), unit cell area (Acell), and Poisson’s ratio. As tsub and Acell decrease, the devices can in general, achieve higher adaptability; however, as a trade-off, processing and integration can become complicated. Furthermore, unlike computational wrapping, Poisson’s ratio engineering through kirigami faces the limitation of low areal coverage due to void spaces in kirigami patterns, representing a key optomechanical design challenge to address in the future.
Material-assisted shape morphing
Self-healing polymers (SHPs) and shape memory polymers (SMPs) were proposed as key materials to address the inherent limitation of kirigami-based approaches in achieving full areal coverage. (Fig. 2d) In the case of SHPs, molecular mechanisms such as dynamic covalent bonding, disulfide bonding, or hydrogen bonding enable themselves to self-repair cracks and defects. These mechanisms allow SHPs to maintain structural stability even under repeated strain or external damage, ensuring the durability of optoelectronic devices72. Particularly, conductive SHPs effectively addresses electrical disconnection issues between kirigami patterns while simultaneously enhancing the mechanical stability and electrical connectivity of devices, enabling the operation of LEDs on curved surfaces73.
As also depicted in Fig. 2d, SMPs are a class of material that can temporarily hold a deformed shape and return to its original shape when exposed to external stimuli such as heat, light, electricity, or moisture. A representative example is thermally responsive SMPs, which are programmed to retain a deformed shape below their glass transition temperature (Tg) and recover their original shape when heated above Tg74. This property allows SMPs to overcome geometric constraints in optoelectronic devices while ensuring seamless adaptability to irregular or complex 3D curved surfaces. For instance, replacing kirigami interconnectors with SMPs was shown to effectively fill the gaps between panels in kirigami-based structures, enabling free-form shape transformation and recovery through thermal activation. In addition, a study by Oh et al. demonstrated the development of a shape-morphing platform based on a low melting point alloy (LMPA)-graphene nanoplatelets (GNPs)-elastomer composite capable of electrothermal actuation. By integrating stretchable EL devices, the platform achieved rapid deformation and stable illumination, illustrating potential applications in 3D art displays, wearable deformable displays, and visual-tactile interfaces48.
Currently, materials science societies are actively advancing the development of both SHPs and SMPs. As self-healing and shape-memory response speeds improve and integration processes for electronic devices become more refined, these advancements are expected to complement origami and kirigami techniques, ultimately enabling seamless, free-form origami/ kirigami optoelectronics in the future.
Foldable, expandable, and stretchable device
Consumers prefer compact form factors for portability and space-saving, yet they also desire larger sizes for visual comfort and ease of use. This seemingly contradictory demand can be met with devices that are foldable, expandable, or stretchable. While these mechanical functionalities can be achieved using origami and kirigami structures, they often come with significant drawbacks, such as the formation of wrinkled creases, mechanical weaknesses, and image distortion caused by changes in aspect ratio. Nonetheless, solutions to these problems can also be found within origami and kirigami technologies. This section reviews how origami and kirigami contribute to these deformable devices and address the challenges typically associated with them.
Reversible multi-scalability through folding and unfolding
Origami-inspired designs that integrate expandable substrates and foldable interconnects provide an effective solution for the reversible multi-scalability of optoelectronic devices (Fig. 3a). Folding bulky optoelectronic devices into compact forms maximizes space-saving, freeing them from the constraints of external space and enhancing portability. Conversely, unfolding smaller devices into large-area forms enhances optical functionality through increased active areas, making them suitable for applications such as large-area displays, signage, solar cells, and E-papers.

a Schematic diagram of an expanded device and a compact device with reconfigurability through folding and unfolding. b Examples of foldable and expandable optoelectronic devices classified by device type (light-emitting and photodetectors). c Classification of stretchable optoelectronic devices based on strategies for achieving high areal coverage, along with a graph depicting the areal ratio (FF) as a function of system strain (εsys). Shapes and colors were used to distinguish device types and structural categories within the figure. In the 2D coplanar structures, gray circles, squares, diamonds, pentagons, and triangles indicated inorganic device configurations, while pink circles, squares, and upright triangles denoted organic device layouts. In the 3D nonplanar structures, purple circles, triangles, upright triangles, light-blue circles and squares represented buckled interconnector architectures, and khaki, purple, and light-blue circles and squares indicated hidden interconnector structures. Orange and khaki circles together with khaki squares were used to depict multi-plane arrangements, and light-blue circles and squares signified pixel elements that became hidden within the folded or out-of-plane geometry. d Free-form display studies implementing strategies to prevent image distortion caused by folding and stretching. (Fig. 3b is reproduced with permission under CC BY 4.0 license from ref. 80 and from ref. 75, copyright 2020, Elsevier, ref. 76, copyright 2023, American Chemical Society, ref. 17, copyright 2021, Springer Nature, ref. 77, copyright 2013, Wiley, ref. 78, copyright 2016, American Chemical Society, ref. 79, copyright 2016, The Royal Society of Chemistry, ref. 50, copyright 2017, American Chemical Society, ref. 81, copyright 2021, Wiley, ref. 82, copyright 2019, Wiley. Figure 3c is reproduced with permission under CC BY 4.0 license from refs. 18,51 and from ref. 15, copyright 2012, Wiley, ref. 16, copyright 2011, Wiley, ref. 99, copyright 2010, Springer Nature, ref. 101, copyright 2022, Elsevier, ref. 97, copyright 2019, American Chemical Society, ref. 98, copyright 2022, American Chemical Society. Figure 3d is reproduced with permission under CC BY 4.0 license from refs. 102,103,105 and from ref. 64, copyright 2022, Wiley, ref. 106, copyright 2024, Elsevier, ref. 108, copyright 2024, Wiley).
Figure 3b presents various studies on foldable light-emitting and light-receiving devices and illustrates reversible conversion between folded and unfolded states. To enable reversible folding without damage and maintain stable device performance under strain, crease engineering is essential to minimize the strain applied to the most brittle layer below its crack onset strain. For example, in OLEDs, the encapsulation layer made of nitride or oxide layers, such as Al2O375 and transparent thin-film electrodes76 exhibit very low crack onset strains. To address this, neutral plane engineering and ultrathin substrates are often employed. For instance, foldable OLEDs with bending radii as low as 50 μm were achieved through the introduction of ultrathin symmetric sandwich structures in which active layers are located near the neutral plane. Similarly, laser patterning based on a metal etch-stop layer was used to selectively thin the SU-8 substrate at crease regions. With this method, a quantum-dot LED (QLED) display with a bending radius of 47 μm17 has been demonstrated.
In view of materials, graphene or 2D materials hold a potential for use on the creases of origami optoelectronics as an extremely thin electrode. For example, Hyun et al. and Polat et al. demonstrated multi-foldable EL platforms using graphene electrodes on paper substrates77,78. In addition, research combining a hybrid structure of thin Au films on AgNWs electrodes with crease regions made of elastomer-based origami substrates demonstrated the potential for bezel-less display concepts79. These reversible multi-scalable features enabled by origami technology has been widely applied to large-area applications where both scalability and portability are critical, such as solar cells, photodetectors,50,80,81,82 and displays.
High-coverage stretchable platform
An array of rigid islands connected with serpentine interconnectors is a good example for kirigami technologies applied to optoelectronic devices, enabling stretchability and adaptability over 3D surfaces. This architecture has gained popularity as it provides a naturally stretchable platform for matrix-type devices such as displays, image sensors, and pressure-mapping sensors. The interconnectors handle the stretching function, allowing the active regions within the rigid islands to undergo minimal deformation and maintain high performance. However, there is a significant limitation when all components are confined to a 2D plane: the space occupied by the interconnectors reduces the initial geometric fill factor, or the area coverage ratio of active regions relative to the total system area. Furthermore, this fill factor limitation becomes even more serious as the distance between active areas expands during stretching.83 This issue is particularly severe in displays implemented with discrete LEDs12,84,85,86,87,88,89,90,91,92,93, where the point light source nature results in the initial fill factors often below 30%. Although research utilizing OLEDs with area light source characteristics reported maximized initial fill factors94,95,96, the rapid decline in fill factor during stretching remains as a challenge in 2D approaches.
However, a clear solution can be proposed by expanding islands and interconnectors into 3D structures, positioning them on different planes. Replacing the interconnectors in existing platforms with buckled origami/kirigami interconnectors in 3D structures can significantly reduce the distance between light-emitting areas, thereby maximizing the initial fill factor15,16,51. In addition, methods such as hiding interconnectors beneath the active areas97,98 or introducing multi-plane structures99 have been proposed to further enhance the initial fill factor (Fig. 3c). Kirigami structures was also shown to present an advantage in minimizing voids by introducing cutting lines in the initial sheet, making them an effective method for increasing the initial fill factor70,100.
From the perspective of displays and other matrix-type devices, it is not just the initial fill factor that is important; challenges also arise in addressing the resolution drop that occurs during stretching. Recent developments have utilized 3D origami interconnectors to implement hidden pixels101 within 3D structures that gradually reveal active areas during stretching. This approach has been shown to effectively address both high initial fill factors and resolution compensation issues to some degree18,101.
Distortion-free deformation technology
For applications such as displays and image sensors, which transmit or collect information on a pixel-by-pixel basis, ensuring precise, distortion-free image quality is crucial. However, when strain is applied to deformable devices, these systems often experience distortion for various reasons. For instance, in foldable displays using origami techniques, significant visual issues can arise from image discontinuity at crease regions or from wrinkles that form there. To address these issues, research was conducted using cylindrical lens pairs designed through ray tracing102 and 3D-printed concave mirrors to maintain image continuity103 (Fig. 3d). In addition, many efforts are being made to optimize hinge structures to reduce wrinkles at the crease region as much as possible104.
On the other hand, stretchable displays utilizing kirigami face major challenges due to changes in aspect ratio caused by structural deformation during stretching. Even when constructed with fully intrinsically stretchable materials, the positive Poisson’s ratio of most materials results in compressive strain along the direction perpendicular to the stretch. This can severely distort the aspect ratio during stretching, underscoring the need for the development of distortion-free stretchable device technology. Kirigami-based auxetic structures, which achieve a Poisson’s ratio of −1, can maintain a consistent aspect ratio even under uniaxial tension, as demonstrated in Fig. 3d64,105.
Furthermore, to realize deformable devices that can be stretched or compressed without strain in the vertical direction, kirigami structures may be configured to exhibit a zero Poisson’s ratio. Such devices were demonstrated by integrating continuous and aligned transparent ribbon arrays within a transparent, stretchable matrix106 or by aligning nanoscopic cylinders unidirectionally within block copolymer elastomer films107. In addition, devices with biaxial zero Poisson’s ratios were also reported, leveraging the synergistic effect between soft mechanical metamaterial frames with negative Poisson’s ratios and elastomer matrices with positive Poisson’s ratios. This allows for substrates with programmable Poisson’s ratios108. (Fig. 3d) Although these technologies are currently applied mainly in display technology, they are expected to be equally applicable to deformable image-sensing devices as well.
Photonic modulation device
Generally, the optical properties such as reflectance, transmittance, and absorptance of a material are determined by its characteristics and structural composition. For example, the inclusion of conductive materials critical to many electronic or optoelectronic devices - such as transparent conductive oxides (TCO), thin metallic films, metal meshes, or metal nanowires109,110,111,112,113,114 - affects both reflectance and transmittance. While the optical properties of a material are usually stable, barring material degradation over time, they can be deliberately modulated to produce significant optical changes. This modulation can be achieved through variations in the thickness of layers within a system, angular adjustments of the reflecting layer, or pitch modulation of a grating structure. For instance, even transparent dielectric layers can affect the overall reflectance, transmittance, and absorbance of an assembly of materials through the multilayer interference effect when their thicknesses are varied115. In addition, origami and kirigami structures, when incorporated into optoelectronic devices, can modulate these optical properties during mechanical deformation. As seen in Fig. 4, these optoelectronic modulation devices can be categorized according to their modulation schemes into geometric reconfiguration, material phase/state change, and actuator-driven/responsive effects. Geometric reconfiguration refers to the reversible switching between multiple geometric shapes. This differs from a state/phase change, which involves a state changing either discretely or continuously from an initial state to modulate an optical property. Furthermore, actuator-driven/responsive effects are defined as mechanical deformations that are caused by an external actuator or by a response to environmental stimuli like light. All these methods allow for the creation of versatile devices with the capability to switch between pre-designed optical properties, a feature not easily achievable with conventional techniques.

a Demonstration of optical reflectance, transmittance, and absorptance modulation enabled by geometric reconfigurability. Examples include wideband reflection control, sun umbrella applications, negative reflection mechanisms, transmittance modulation for temperature regulation, sensing and ring resonator, and adaptive solar tracking for energy harvesting and microwave absorption. θs denotes the solar altitude angle, θf denotes the feature angle, and εs denotes the system strain. b Examples of optically driven reconfigurable systems, including light-responsive structures, laser-actuated micro grippers for precise manipulation, and biomimetic shape-morphing devices triggered by optical stimuli. c Illustration of spatial recognition mechanisms using reconfigurable geometries, nanophotonic resonators based on on-chip kirigami structures, and meta-optics for tunable optical responses inspired by biomimetic structures. All the cases shown in this figure have been marked according to the following classifications: geometrical reconfiguration (Squares), material phase/state change (Triangles), actuator-driven/responsive effect (Circles). (Fig. 4a is reproduced with permission under CC BY 4.0 license from ref.53,54,55,57,116 and from ref. 52, copyright 2020, Springer Nature, ref. 118, copyright 2019, Cell Press, ref. 119, copyright 2021, Elsevier. Figure 4b is reproduced with permission under CC BY 4.0 license from ref. 124 and from ref. 122, copyright 2017, Wiley. Figure 4c is reproduced with permission under CC BY 4.0 license from ref. 125 and from ref. 22, copyright 2017, American Chemical Society, ref. 126, copyright 2019, Springer Nature).
Reflectance, transmittance, and absorptance
Diverse operational mechanisms for an exemplary origami-based reflection modulation device are depicted in Fig. 4a. In its planar state, the device’s optical reflectance is influenced by the electrode characteristics and surface roughness. When transformed into origami or kirigami structures, reflection properties (e.g., reflection angle) are also influenced by the geometrical shape of the deformed device. Different from multilayer anti-reflection or high-reflection coating that relies on thin-film interference and thus have a wavelength dependence, the origami- or kirigami-based approaches can work over the broadband spectrum. It is also straightforward to change the light path, such as with a sun umbrella52,55,56. With the right origami geometry, negative reflection or retroreflection is also possible116.
For modulation of optical transmittance, kirigami structures are often adopted. As illustrated in the second row of Fig. 4a, the ratio of the perforated area varies as the kirigami-based device is stretched or contracted. This modulation of optical transmittance is useful in applications requiring adjustable light control, such as indoor shading systems or temperature control systems56,117,118. The correlation between system strain and perforated area ratio can serve as a method for strain tracking by monitoring variations in transmitted light119. In addition, in applications involving split ring resonators, strain-induced rotations can adjust the resonant frequency of the system by altering the distance between each ring resonator57.
Optical absorptance is crucial for the functionality of optoelectronic devices, particularly in applications such as photodetectors and photovoltaic devices, including solar cells. In these devices, the optical absorptance is directly linked to the efficiency of each device. In photovoltaic applications, efficient light harvesting often requires adjusting the geometrical arrangement of solar cell arrays to optimize alignment according to solar altitude during the day or to varying weather conditions, 53 maximizing the light in-coupling efficiency and thus electrical power generation per given conditions. (See the third row of Fig. 4a) Integrating origami or kirigami structures into photovoltaic devices allows for dynamic alignment of solar cells in response to environmental conditions, significantly boosting light-harvesting efficiency120,121. In addition, it has been demonstrated that origami structures can enhance the absorption of microwaves for improved photodetectivity50,54.
Light-responsive morphing devices
Origami/kirigami structures require an energy source for their activation of mechanical deformation. When combined with light-responsive materials, the deformation of origami/kirigami structures can be precisely and remotely controlled using light. (See Fig. 4b.) For example, they can be used to implement micron-scale grippers by illuminating an origami-shaped gripper with a laser122 or to in shape-morphing systems that may be useful in soft robotics, biomedical devices, and wearable sensors. Light-responsive materials, such as liquid-crystalline networks (LCN)122, N-isopropylacrylamide (PNIPAm)123 or gold nanoparticle124 can trigger reshaping of origami and kirigami structures via light (or light-induced heat), enabling remote, delicate, and dynamic automated control of the entire system124.
Advanced photonic applications
Beyond modulation of simple optical properties such as reflection, transmission, and absorption, origami and kirigami approaches can be utilized for more advanced photonic applications, as illustrated in Fig. 4c. For instance, integrating origami structures with conventional planar photodetectors can realize 3D photodetectors with spatial recognition while utilizing conventional 2D fabrication processes22. It has also been demonstrated that on-chip kirigami structures can be introduced to control properties like reflectance across different spectral ranges within nanoscale devices125. Furthermore, the unique geometrical properties, which differ from those of planar structures, can induce meta-optical effects. For example, plasmonic sheets with kirigami patterns can be used to modulate the polarization of THz radiation126. By stretching the kirigami structure, parameters such as the polarization rotation angle can be modulated to obtain optimal THz response.
Key design strategies for origami/kirigami optoelectronic device
While many creative ideas have been proposed for origami/kirigami-based optoelectronic devices, their true success hinges on meeting various stringent practical requirements while achieving the desired characteristics and functionalities. Building on previous studies, this section delves into key design strategies for deployable origami/kirigami optoelectronic devices, focusing on five critical aspects: optical, mechanical, actuation, degree of freedom (DOF), and multi-scale design. Since prior studies have often focused on only a subset of these strategies, this section aims to develop comprehensive design strategies that integrate all five aspects.
Optical design strategy
For the design of angular reflection, transmission, absorption characteristics, and emission/detection properties on the surface of a single optoelectronic device, the fundamental approach often involves adjusting the material and thickness (t₁, t₂) of each layer. t1 and t2 correspond to the thickness of layers such as the charge transport layer or capping layer and are the primary parameters adjusted through wave optics-based multilayer thin-film simulations, especially when the vertical dimension (e.g., thickness) is much smaller than the horizontal dimension, allowing the system to be effectively treated as a 1D problem127. When there is a microscopic structural variation along the 2D plane or in the 3D space, one may need to adopt more advanced optical simulations such as rigorous couple wave analysis (RCWA), finite-element method (FEM), and finite-difference time-domain (FDTD). For macroscopic 2D/3D structural variation whose characteristic dimension is much larger than the wavelength of light, one may use Monte-Carlo-based ray-tracing optics. The FEM and FDTD methods directly solve Maxwell’s equations numerically under given boundary conditions, and thus they should provide, in theory, the most straightforward means to analyze any optical system; however, they require a substantial amount of resources and often become impractical in terms of simulation time and computing resources. It is therefore important to look for symmetry or dimensions that can simplify the problems.
Fortunately, many of the optical devices that involve origami/kirigami structures have a relatively large dimension, so that Monte-Carlo-based ray-tracing simulation can be used for analysis and design for the majority of a given system. Depending on the scale of the components involved, the light output (for displays) or the absorption (for sensors) of unit devices may need to be simulated in wave-optic domain and combined with ray-tracing simulation in a trans-scale fashion128,129. For example, analyzing the variation in light distribution of a stretchable OLED display adopting a rigid island array and serpentine interconnectors under different system strain (εsys) conditions can be done with Monte-Carlo-based ray-tracing by combining angle-dependent light output from an individual OLED obtained with wave-optic simulation as source properties in simulation software such as LightToolsTM. The trans-scale simulation results reveals that, as the distance between light-emitting areas increases upon stretching, luminance uniformity decreases (Fig. 5a), where the luminance uniformity is evaluated using the coefficient of variation of root mean square error [CV(RMSE)]130, which is defined as the ratio of RMSE to the mean value (xmean), i.e., \({{\rm{RMSE}}}/{x}_{{{\rm{mean}}}}\). Furthermore, in complex systems adopting origami/kirigami structures, where light emitted from one-unit element could be incident on the surface of other unit elements, attention must be given to potential interference from those stray components that would otherwise be present.

a optical thickness modulation (wave optics) and light uniformity control (ray optics). b Mechanical stability was analyzed by incorporating the interdependent relationship between the crease modulus Ecrease, crease angle θ, and applied strain εappl. Neutral-plane design was employed to mitigate excessive strain accumulation at folding sites. Finite-element-method (FEM) simulations captured stress localization, and stable operating conditions were identified by ensuring Max(εappl) < Min(εcos). Stress concentration was reduced through serpentine geometries—with parameters including arm length l1, l2, width w, and thickness t and hinge/rounded-corner designs characterized by hinge width a, length l, radius r, and hinge depth d. c Five actuation schemes were summarized, each enabling controlled deformation of optoelectronic platforms. Mechanical actuation relied on externally applied displacement or pressure to reconfigure planar arrays. Thermal actuation used temperature- or humidity-induced expansion gradients to trigger folding. Optical actuation utilized localized photothermal heating for controlled bending. Magnetic actuation incorporated magnetically responsive elements to enable reversible deformation under an applied magnetic field B. Electrical actuation used current (I)-driven Joule heating or electroactive materials for on–off shape modulation. d In-plane kinematic models were constructed to describe the motion of linkages under geometric constraints, using parameters such as panel lengths a, b, diagonal span 2S, height H. Loop-closure equations defined the relationship among folding angles (α1, α2, α3, α4) and the characteristic radius R, ensuring that global configurations evolved consistently with prescribed origami mechanisms. (e) Micro-patterning techniques—such as focused-ion-beam (FIB) machining or laser patterning—were used to introduce localized cuts and creases prior to folding. Controlled strain release produced out-of-plane buckling, enabling the formation of complex 3D geometries from initially planar devices. (Fig. 5c is reproduced with permission under a CC BY license from ref. 133. Figure 5c is reproduced with permission under a CC BY 4.0 license from ref. 134. Figure 5c is reproduced with permission from ref. 140, copyright 2018, Springer Nature. Figure 5c is reproduced with permission from ref. 141, copyright 2017, the Royal Society of Chemistry. Figure 5d is reproduced with permission from ref. 4, copyright 2013, the National Academy of Sciences. Figure 5d is reproduced with permission under a CC BY 4.0 license from ref. 143. Figure 5e is reproduced with permission under a CC BY license from ref. 24).
Mechanical design strategy
The strain applied to the crease (\({\varepsilon }_{{{\rm{app}}}}^{({{\rm{crease}}})}\)) due to folding in origami and kirigami structures can be expressed as a function proportional to the Young’s modulus of the crease material (Ecrease), the folding angle (θ), and the thickness of the sheet (t) by Eq. 1, as follows:
In particular, the strain applied to each layer at the crease is proportional to its distance from the neutral plane. Therefore, a fundamental principle of mechanical design is to position the most fragile layer, which exhibits the lowest crack onset strain (\({\varepsilon }_{\cos }\)), as close to the neutral plane as possible. Since the position of the neutral plane is also influenced by the thickness of each layer, t1, t2, which may also be adjusted for optical property optimization, careful attention must be given to the interplay between mechanical and optical design during the engineering process.
When mechanical deformation applied to the device extends beyond simple folding to include buckling or more severe distortions, stress concentration effects could become significant. Typically, these concentrations arise at vertices or discontinuous geometric features, complicating the exact calculation of the applied strain (εappl)61. As a result, simulations based on FEM are commonly employed to derive accurate strain distributions18,51. (Fig. 5b) Overall, the design criterion for ensuring mechanical stability is given by Eq. 2.
In other words, the maximum applied strain of the most brittle layer within regions of folding and stress concentration must be smaller than the crack onset strain for those areas. The vulnerable layer often includes materials such as transparent conductive oxides, inorganic semiconducting layers, or the oxides/ nitrides used for encapsulation and packaging. Although accurate calculation of stress concentration is not a trivial task, attempts to reduce stress in serpentine structures were found effective upon strategic optimization of the geometry of interconnectors131,132. In addition, numerous studies have been conducted on reducing stress concentration in hinges of auxetic structures by optimizing hinge geometry or utilizing materials with relatively low Young’s modulus62,63,64,65.
Considerations for actuation, mechanical degree of freedom (DOF), and scaling-down
A key differentiator for any origami and kirigami devices is their capacity to achieve morphological changes through the mechanical bending of structures. Hence, the importance of actuation may not be overemphasized in those devices. While most cases involve external forces for the source of activation, recent studies have moved beyond these externally driven deformations to explore actuation mechanisms enabling autonomous structural adaptations in response to environmental stimuli. Notable examples of such mechanisms include humidity-responsive strategies that leverage swelling or contraction caused by water absorption133,134, light-driven configurations utilizing photothermal effects135,136,137, magnetically actuated systems inducing torque through external magnetic fields44,138,139,140, and electrical responses in which Joule heating triggers phase transitions or volumetric changes, resulting in structural transformations141. (Fig. 5c) These diverse actuation strategies confer significant advantages in automation and energy efficiency while broadening the range of potential applications, such as environmental monitoring through integrated sensing capabilities.
Origami has relatively lower DOF compared to kirigami, making it inherently challenging to control complex structural behaviors (Fig. 5d). To address the low DOF of origami, foundational efforts have focused on developing kinematic models that enable rigid-foldability in thick panels or designing single-DOF mechanisms to achieve kinematic folding on flat surfaces142. In addition, traditional linkage mechanisms, such as Bennett and Bricard linkages, have been modified and expanded to incorporate diverse linkage-based mechanisms into thick origami designs143. These studies are regarded as notable efforts to overcome the kinematic constraints arising from origami with low DOF.
Unlike the ease of scaling up origami and kirigami structures, scaling them down presents substantial challenges (Fig. 5e). As the scale of folds and cutting lines decreases, the arrangement of unit cells becomes more complex, making multi-scale design essential for precise 3D structure formation. Mechanically guided assembly strategies, which exploit controlled deformation and pre-designed bonding sites to achieve deterministic 3D architectures, have been shown to be effective for creating such intricate structures144,145. To achieve highly refined small-scale 3D formations, precision machining techniques such as focused ion beam (FIB) processing or laser patterning were employed to create fine creases24,28,146. In addition, to maximize the effect of reduced crease dimension, a method involving a pre-strained substrate was proposed. In this method, a patterned device is placed on the pre-strained substrate, and specific regions are intentionally bonded to secure the structure before the strain is released. This deterministic fabrication approach was demonstrated to enable the creation of complex and highly precise structures146,147,148. Such fabrication techniques facilitate the formation of micro-scale creases and cutting lines, allowing for precise structural control and thereby enhancing multi-scale fabrication and operation.
Synergetic design approaches for balancing functionality, performance, and properties
When applied to the applications previously discussed — adaptable, expandable/stretchable, and photonic modulation, the five design strategies mentioned above may face challenges due to trade-offs that could exist among the target functionality, performance, and other properties such as mechanical robustness. Potential issues that may arise, in both common and application-specific scenarios, are summarized in the upper and lower parts of Table 1, respectively. The intrinsic characteristics of origami/kirigami structures introduce vulnerabilities that make them more sensitive than conventional flexible or stretchable devices, thereby posing numerous challenges. Recently, synergistic design approaches that balance optical functionality, performance, and mechanical properties—particularly in the realm of free-form displays—have begun to be reported.
For origami systems, for instance, the device must withstand bending to very small radii of curvature. Achieving this typically requires thinning the overall structure, which can compromise stiffness. To address this trade-off, localized thinning of only the hinge regions has been implemented via laser etching17, and ultra-thin materials such as graphene have been employed specifically at the hinges101. Kirigami structures, on the other hand, inherently suffer from stress concentration at the cut tips. This has been mitigated by rigorous mechanical simulations that predict and minimize stress concentration to ensure device stability18. For example, in high fill-factor stretchable displays based on 3D pop-up islands, the geometric dimensions were optimized not only for mechanical stability but also for human visual perception, thereby balancing the need for high-resolution operation and that for mechanical reliability51. Building on these synergistic designs that jointly consider optical and mechanical targets, future research will require further advanced strategies in terms of actuation, degrees of freedom (DOF), and multi-objective/multi-design optimization.
Outlook
Technology readiness vs. design categories and their future development agenda
In Box 2, we evaluate the current technology readiness level (TRL) of origami and kirigami optoelectronic devices, based on the five design strategies established in the previous section. This assessment aims to identify the key development agenda of each design category. It is important to note that factors beneficial for some design aspects can complicate others. For instance, high DOF, enhancing the mechanical variability of origami/kirigami devices, tends to complicate the prediction and design of optical properties. A notable example is origami/kirigami-based displays, which undergo significant geometric transformations compared to conventional planar displays. This can exacerbate optical artifacts such as angular color shift and luminance variability. Therefore, one should pay attention to the overall optical characteristics that take into account those of individual unit devices as well as their total sum in various relative orientations and array configurations.23,149, For complex optoelectronic systems that encompass both wave optics and ray optics domains, such as multilayer thin-film structures like those of OLEDs incorporating both thick substrates and organic or inorganic thin films, trans-scale simulations may be performed for seamless integration of both domains without needs for too much computational resources or compromise in simulation accuracy128,129.
In terms of mechanical design, kirigami is generally more challenging to realize than origami due to the stress concentration effect caused by the expansion of cutting lines, which can potentially reduce mechanical stability. To counteract this issue and enhance mechanical robustness, the implementation of multi-neutral plane designs could be actively pursued150,151,152,153. In addition, given that the creases and cutting lines in origami and kirigami structures act as pre-existing cracks, repeated use may lead to material fatigue and degradation. Thus, improving fatigue resistance is a critical focus for future research. It is also noted that, by leveraging their reconfigurability, origami and kirigami structures may become useful for machine learning devices in the future154,155.
In terms of actuation design, kirigami boasts a higher DOF than origami. Kirigami not only allows for independent actuation between unit cells but also supports the simultaneous manifestation of global deformation characteristics. This ability enables the creation of a wide variety of 3D structures tailored to specific types of input signals used for actuation. In contrast, origami typically exhibits unidirectional actuation and structural transformation in response to a given input signal. As a result, origami requires prior structural modifications to adapt to multiple environmental variables for morphing into a diverse range of 3D configurations. Although multi-response actuation techniques that are capable of creating various shapes through the application of magnetic fields or heat were investigated156, reports of such implementations still remain limited. Leveraging a broader array of environmental variables to manufacture diverse 3D structures is anticipated not only to maximize the utility of these designs but also to substantially expand their range of potential applications.
As for DOF design aspects, recent advancements in algorithm-based design techniques have enabled the design of metamaterial structures157,158, making it possible to partially overcome the low-DOF limitations of origami. However, current methodologies typically treat origami and kirigami designs as separate disciplines, and integrated research considering both is still in its early stage159. Another challenge arises as the number of folds and cuts increases in these designs, leading to an exponential increase in the complexity of optimization problems. This complexity necessitates the use of artificial intelligence (AI)-based algorithms, which not only automate the exploration of complex design spaces and optimization processes but also enable the discovery of novel origami and kirigami structures that are beyond the reach of conventional methods.
In terms of multi-scale design, both origami and kirigami structures are difficult to control due to limitations in the range of design options at the crease scale. While large-scale designs offer superior robustness and ease of fabrication, as can be seen in the example of foldable devices or satellites, the challenges of 3D deformation become significant with intricate and highly complex structures featuring microscopic crease patterns. At the microscale, designs reduce sub-cell stiffness in both origami and kirigami, necessitating precisely tailored driving forces for effective 3D formation28. Kirigami structures, with their high degree of freedom (DOF), are easier to actuate but require precise high-resolution force control. To overcome these challenges, electromagnetic control, for instance, has been proposed as a promising solution160. This approach facilitates complex shape transformations and precise 3D structure formation, while real-time optimization of magnetic fields and current distributions significantly enhances the accuracy and efficiency of shape morphing. Finally, multiscale coupling between nano-optics and macro folding has produced credible system prototypes, although
cross-scale alignment remains a barriers for practical deployment. While meta-surface guided stretchable displays and shape-morphing photonic systems have been demonstrated in lab scales, one should continue to establish methodologies to achieve the mechanical stability of microscopic structures while fulfilling target macroscopic properties and operations.

Efforts to be made towards industrialization
The translation of origami/kirigami architecture into industrial products demands solutions for both manufacturing scalability and process integration, as summarized in Box 3, left panel, which presents process compatibility, advanced material solutions, and scalable integration approaches. Using industrialized display-fabrication processes—such as photolithography, anisotropic conductive film (ACF) bonding, Au/In eutectic bonding, and flip-chip transfer—provides the precision, throughput, and alignment tolerances necessary for high-volume production while ensuring compatibility with existing fabrication lines161,162. These processes, proven in LED and OLED production, enable consistent yield control and defect mitigation. Ensuring mechanical and functional stability under repeated folding or stretching further requires materials with high fatigue resistance and thermal stability. Polyimide composites reinforced with carbon fibers and polytetrafluoroethylene (PTFE) exhibit high thermo-oxidative stability and improved fatigue performance through reduced wear and stable mechanical hysteresis163. Likewise, superelastic alloys, including high-entropy alloy systems, provide high fracture toughness and cyclic stability under large, reversible strains, making them suitable for hinges and other stress-concentrated regions in deployable systems164.
Advancing these platforms toward nanoscale device integration enables higher functional density and adaptability. Photosensitive polyimides (PSPI) offer a cost-effective approach for micro- to nanoscale patterning of polyimide substrates by combining photopatternable matrices with photoactive agents or amic acid/ester precursors, enabling direct ultraviolet (UV) exposure, localized cross-linking or chain scission, and subsequent development165. This approach reduces fabrication steps compared with conventional photolithography–etching sequences while maintaining sub-micrometer resolution. High-resolution additive manufacturing methods—such as electrohydrodynamic (EHD) jet printing with ~ ca. ~ 1 µm feature sizes and two-photon polymerization achieving ~ ca. ~ 100 nm resolution—enable direct deposition of device architectures onto folded or patterned substrates166. In addition, maskless photolithography based on UVC micro-LED micro-displays eliminates the requirement for physical masks, enables rapid pattern reconfiguration, and delivers sufficient UV exposure for sub-micrometer photoresist patterning on planar and non-planar substrates167. Therefore, these approaches define practical routes for embedding functional nanodevices within foldable and deployable systems on optoelectronic devices.

Artificial intelligence (AI)-assisted design and optimization
To meet the complex demands of mechanical, optical, and electrical properties and to realize advanced functionality in origami/kirigami optoelectronics, design methodologies based on simple iterative solutions are often too resource-heavy and time-consuming to yield optimal designs in a timely manner. However, recent advancements in machine-learning technologies have made high-dimensional computation possible, enabling innovative designs that were previously impossible and ultra-fast global optimization for multiple parameters.
Nature-inspired designs, such as moth-eye patterns or gecko feet, are one of the famous examples that possess high functionality and are almost impossible to obtain from human-centric design conceptualization168,169. In this regard, artificial intelligence (AI) models with various optimization schemes can help generate a design concept and find optimal solutions, which could not be easily identified with brute-force iterative methods170. For example, genetic algorithms are a bold attempt to mimic nature through methods like survival of the fittest, crossover, and mutation171. Topology optimizations can also be of great help in moving beyond human-centric thinking, and reinforcement learning can be used to gradually find optimal shapes, starting with human-centered or nature-inspired designs172.
Note that origami/kirigami optoelectronic devices involve a significant number of optimization parameters, including geometric (width, thickness, length…), mechanical (Young’s modulus, Poisson’s ratio, density…), optical (refractive index, absorbance, emission characteristics…) parameters within the unit cell, as well as the properties of the whole array composed of these unit cells. These designs often rely on 3D finite element analysis (FEA) with multiphysics, which requires substantial computing resources. To address these issues, surrogate models or machine learning (ML) assisted inverse designs may be adopted, as discussed by Alderete, Pathak, and Espinosa173, or algorithms that search for efficient optimization paths, such as Bayesian optimization or particle swarm optimization, can also be utilized174.
It is also foreseeable that AI-assisted hybrid FEA could substantially streamline multiple stages of design and optimization175. For example, once a conceptual design that satisfies the desired objectives is generated with the aid of AI-based models, AI may further support the selection of suitable algorithms for parameter optimization. Moreover, AI-driven databases could be leveraged to anticipate and mitigate challenges such as numerical instabilities that often arise in mesh-based FEA. With this level of AI integration, achieving efficient yet precise identification and optimization of origami/kirigami architectures capable of meeting complex mechanical, electrical, and optoelectronics requirements under multiple constraints appears increasingly within reach.
Future directions and opportunities
Origami- and kirigami-based optoelectronics have demonstrated remarkable potential in realizing adaptive, stretchable, and optically tunable device architectures, enabling applications ranging from wearable electronics and biomedical devices to advanced photonic systems. By exploiting mechanical reconfigurability and geometric programmability, these structures present transformative opportunities that go beyond conventional flexible or stretchable optoelectronics, offering tunable optical properties, adaptive device geometries, and multi-functional integration. In particular, recent advances in flexible and stretchable light-emitting diodes and photodetectors for human-centric optoelectronics176 highlight the importance of integrating device-level functionality with user-adapted form factors, which is fully aligned with the potential of origami/kirigami architectures.
At the same time, these unique advantages introduce distinct challenges, such as the presence of multiple folding sites requiring precise control over folding directions and angles, etc. and robustness against repeated folding, scalable fabrication of patterned architectures, and the need to preserve optical and electrical performance not only across the folding sites but also over multiple system configurations. Addressing these issues remains critical for the field to advance. Looking ahead, overcoming such hurdles could allow optoelectronics to evolve into a fully programmable, self-adaptive platform for next-generation flexible, stretchable, and shape-morphing optoelectronic systems. Furthermore, as interdisciplinary collaborations across materials science, mechanical engineering, and optics continue to expand, the integration of AI-driven design strategies may accelerate the discovery of novel geometric configurations and optimized device architectures, ultimately unlocking the full potential of optoelectronics.
Change history
10 April 2026
A Correction to this paper has been published: https://doi.org/10.1038/s41467-026-71982-z
References
Demaine, E. D. & O’Rourke, J. Geometric Folding Algorithms: Linkages, Origami, Polyhedra. (Cambridge University Press, Cambridge, 2007).
Kanade, T. A theory of origami world. Artif. Intell. 13, 279–311 (1980).
Schenk, M., Viquerat, A. D., Seffen, K. A. & Guest, S. D. Review of inflatable booms for deployable space structures: packing and rigidization. J. Spacercr. Rockets 51, 762–778 (2014).
Schenk, M. & Guest, S. D. Geometry of miura-folded metamaterials. Proc. Natl. Acad. Sci. USA 110, 3276–3281 (2013).
Silverberg, J. L. et al. Using origami design principles to fold reprogrammable mechanical metamaterials. Science 345, 647–650 (2014).
Callens, S. J. & Zadpoor, A. A. From flat sheets to curved geometries: origami and kirigami approaches. Mater. Today 21, 241–264 (2018).
Jin, L. & Yang, S. Engineering kirigami frameworks toward real-world applications. Adv. Mater. 36, 2308560 (2024).
Misseroni, D. et al. Origami engineering. Nat. Rev. Methods Primers 4, 40 (2024).
Iqbal, S. M., Mahgoub, I., Du, E., Leavitt, M. A. & Asghar, W. Advances in healthcare wearable devices. Npj Flex. Electron. 5, 9 (2021).
Wang, J. & Chortos, A. Performance metrics for shape-morphing devices. Nat. Rev. Mater. 9, 738–751 (2024).
Hong, W. et al. Self-adaptive cardiac optogenetics device based on negative stretching-resistive strain sensor. Sci. Adv. 7, eabj4273 (2021).
Jung, D. et al. Multilayer stretchable electronics with designs enabling a compact lateral form. Npj. Flex. Electron. 8, 13 (2024).
Han, M. et al. Submillimeter-scale multimaterial terrestrial robots. Sci. Robot. 7, eabn0602 (2022).
Kim, Y. et al. Remote control of muscle-driven miniature robots with battery-free wireless optoelectronics. Sci. Robot. 8, eadd1053 (2023).
Lee, J. et al. Stretchable semiconductor technologies with high areal coverages and strain-limiting behavior: demonstration in high-efficiency dual-junction GaInP/GaAs photovoltaics. Small 8, 1851 (2012).
Lee, J. et al. Stretchable GaAs photovoltaics with designs that enable high areal coverage. Adv. Mater. 23, 986 (2011).
Kim, D. C. et al. Three-dimensional foldable quantum dot light-emitting diodes. Nat. Electron. 4, 671–680 (2021).
Lee, D. et al. Stretchable OLEDs based on a hidden active area for high fill factor and resolution compensation. Nat. Commun. 15, 4349 (2024).
Choi, C. et al. Human eye-inspired soft optoelectronic device using high-density MoS2-graphene curved image sensor array. Nat. Commun. 8, 1664 (2017).
Zhang, K. et al. Origami silicon optoelectronics for hemispherical electronic eye systems. Nat. Commun. 8, 1782 (2017).
Dong, H. et al. Perovskite origami for programmable microtube lasing. Adv. Func. Mater. 31, 2109080 (2021).
Fang, H. et al. An origami perovskite photodetector with spatial recognition ability. ACS Appl. Mater. Interfaces 9, 10921–10928 (2017).
Kim, M. S. et al. Clinical validation of face-fit surface-lighting micro light-emitting diode mask for skin anti-aging treatment. Adv. Mater. 36, 2411651 (2024).
Chen, S., Chen, J., Zhang, X., Li, Z.-Y. & Li, J. Kirigami/origami: unfolding the new regime of advanced 3D microfabrication/nanofabrication with “folding”. Light Sci. Appl. 9, 75 (2020).
Leanza, S., Wu, S., Sun, X., Qi, H. J. & Zhao, R. R. Active materials for functional origami. Adv. Mater. 36, 2302066 (2024).
Xu, L., Shyu, T. C. & Kotov, N. A. Origami and kirigami nanocomposites. Acs Nano 11, 7587–7599 (2017).
Zhai, Z., Wu, L. & Jiang, H. Mechanical metamaterials based on origami and kirigami. Appl. Phys. Rev. 8, 041319 (2021).
Chen, Y., Li, X., Jiang, L., Wang, Y. & Li, J. Nano-kirigami/origami fabrications and optical applications. Appl. Phys. Lett. 124, 160501 (2024).
Kim, D. W. et al. Fabrication of practical deformable displays: advances and challenges. Light Sci. Appl. 12, 61 (2023).
Park, S., Park, E., Lee, M. & Lim, S. Shape-morphing antenna array by 4D-printed multimaterial miura origami. ACS Appl. Mater. Interfaces 15, 49843–49853 (2023).
Miura, K. & Lang, R. J. The science of miura-ori: a review. Origami 4, 87 (2009).
Kidambi, N. & Wang, K. Dynamics of kresling origami deployment. Phys. Rev. E 101, 063003 (2020).
Chandra, S. et al. Computing curved-folded tessellations through straight-folding approximation. In Proceedings of the Symposium on Simulation for Architecture & Urban Design. (2015).
Chen, Z. et al. Ron resch origami pattern inspired energy absorption structures. J. Appl. Mech. 86, 011005 (2019).
Fathers, R., Gattas, J. & You, Z. Quasi-static crushing of eggbox, cube, and modified cube foldcore sandwich structures. Int. J. Mech. Sci. 101, 421–428 (2015).
Redoutey, M., Roy, A. & Filipov, E. T. Pop-up kirigami for stiff, dome-like structures. Int. J. Solids. Struct. 229, 111140 (2021).
Choi, G. P., Dudte, L. H. & Mahadevan, L. Programming shape using kirigami tessellations. Nat. Mater. 18, 999–1004 (2019).
Tao, J., Khosravi, H., Deshpande, V. & Li, S. Engineering by cuts: how kirigami principle enables unique mechanical properties and functionalities. Adv. Sci. 10, 2204733 (2023).
Zhang, H. & Paik, J. Kirigami design and modeling for strong, lightweight metamaterials. Adv. Funct. Mater. 32, 2107401 (2022).
Mora, S., Pugno, N. M. & Misseroni, D. 3D printed architected lattice structures by material jetting. Mater. Today 59, 107–132 (2022).
Sundaram, S., Kim, D. S., Baldo, M. A., Hayward, R. C. & Matusik, W. 3D-printed self-folding electronics. ACS Appl. Mater. Interface 9, 32290–32298 (2017).
Zhao, Z. et al. 3D printing of complex origami assemblages for reconfigurable structures. Soft Matter 14, 8051–8059 (2018).
Lim, S. et al. Graphene hinges: assembly of foldable 3D microstructures using graphene hinges. Adv. Mater. 32, 2070207 (2020).
Breger, J. C. et al. Self-folding thermo-magnetically responsive soft microgrippers. ACS Appl. Mater. Interfaces 7, 3398–3405 (2015).
Nichol, A. J., Stellman, P. S., Arora, W. J. & Barbastathis, G. Two-step magnetic self-alignment of folded membranes for 3D nanomanufacturing. Microelectron. Eng. 84, 1168–1171 (2007).
Randhawa, J. S. et al. Pick-and-place using chemically actuated microgrippers. J. Am. Chem. Soc. 130, 17238–17239 (2008).
Lee, Y.-K. et al. Computational wrapping: a universal method to wrap 3D-curved surfaces with nonstretchable materials for conformal devices. Sci. Adv. 6, eaax6212 (2020).
Oh, S. et al. 3D shape-morphing display enabled by electrothermally responsive, stiffness-tunable liquid metal platform with stretchable electroluminescent device. Adv. Funct. Mater. 33, 2214766 (2023).
Song, Y. M. et al. Digital cameras with designs inspired by the arthropod eye. Nature 497, 95–99 (2013).
Lin, C.-H. et al. Highly deformable origami paper photodetector arrays. ACS Nano 11, 10230–10235 (2017).
Kim, S.-B. et al. 3D height-alternant island arrays for stretchable OLEDs with high active area ratio and maximum strain. Nat. Commun. 15, 7802 (2024).
Savchenko, M., Savchenko, V., Abe, A., Hagiwara, I. & Thai, P. T. A study on an origami-based structure for use as a sun umbrella. SN Appl. Sci. 2, 1–13 (2020).
Yun, M. J., Sim, Y. H., Lee, D. Y. & Cha, S. I. Kirigami-inspired automatically self-inclining bifacial solar cell arrays to enhance energy yield under both sunny and cloudy conditions. iScience 25, 104649 (2022).
Biswas, A. et al. An ultra-wideband origami microwave absorber. Sci. Rep. 12, 13449 (2022).
Song, Z. et al. Origami metamaterials for ultra-wideband and large-depth reflection modulation. Nat. Commun. 15, 3181 (2024).
Jung, H. et al. Large-scaled and solar-reflective kirigami-based building envelopes for shading and occupants’ thermal comfort. Adv. Sustain. Syst. 7, 2300253 (2023).
Niksan, O., Bi, L., Gogotsi, Y. & Zarifi, M. H. MXene-based kirigami designs: showcasing reconfigurable frequency selectivity in microwave regime. Nat. Commun. 15, 7793 (2024).
Cheng, X., Shen, Z. & Zhang, Y. Bioinspired 3D flexible devices and functional systems. Natl. Sci. Rev. 11, nwad314 (2024).
Long, Z. et al. Biomimetic optoelectronics with nanomaterials for artificial vision. Nat. Rev. Mater. 10, 128–146 (2025).
Jin, L., Yeager, M., Lee, Y.-J., O’Brien, D. J. & Yang, S. Shape-morphing into 3D curved surfaces with nacre-like composite architectures. Sci. Adv. 8, eabq3248 (2022).
Pilkey, W. D., Pilkey, D. F. & Bi, Z. Peterson’s Stress Concentration Factors. (John Wiley & Sons, New Jersey, 2020).
Rao, Z. et al. Curvy, shape-adaptive imagers based on printed optoelectronic pixels with a kirigami design. Nat. Electron. 4, 513–521 (2021).
Deng, Y. et al. Rotating square tessellations enabled stretchable and adaptive curved display. Npj Flex. Electron. 8, 4 (2024).
Jang, B. et al. Auxetic meta-display: stretchable display without image distortion. Adv. Funct. Mater. 32, 2113299 (2022).
Jiang, S. et al. A snakeskin-inspired, soft-hinge kirigami metamaterial for self-adaptive conformal electronic armor. Adv. Mater. 34, 2204091 (2022).
Yun, M. J., Sim, Y. H., Lee, D. Y. & Cha, S. I. Highly stretchable, durable and lightweight lego®-style 3-dimensional photovoltaic. In Proceedings 2022 IEEE 49th Photovoltaics Specialists Conference (2022).
Ko, H. C. et al. A hemispherical electronic eye camera based on compressible silicon optoelectronics. Nature 454, 748–753 (2008).
Hong, Y. et al. Boundary curvature guided programmable shape-morphing kirigami sheets. Nat. Commun. 13, 530 (2022).
Hong, Y. et al. Angle-programmed tendril-like trajectories enable a multifunctional gripper with ultradelicacy, ultrastrength, and ultraprecision. Nat. Commun. 14, 4625 (2023).
Takei, A., Komazaki, Y., Kanazawa, S., Kuribara, K. & Yoshida, M. Biaxial stretchable light-emitting device using kirigami-elastomer structure. AIP Adv. 12, 115207 (2022).
Kim, T. et al. Kirigami-inspired 3D organic light-emitting diode (OLED) lighting concepts. Adv. Mater. Technol. 3, 1800067 (2018).
Wang, S. & Urban, M. W. Self-healing polymers. Nat. Rev. Mater. 5, 562–583 (2020).
Liu, J. et al. Self-healing kirigami assembly strategy for conformal electronics. Adv. Funct. Mater. 32, 2109214 (2022).
Lendlein, A. & Kelch, S. Shape-memory. Polymers. Angew. Chem. Int. Ed. 41, 2034–2057 (2002).
Kim, E. et al. Design of ultrathin OLEDs having oxide-based transparent electrodes and encapsulation with sub-mm bending radius. Org. Electron. 82, 105704 (2020).
Kim, J. et al. Toward near-foldable surface light sources with ultimate efficiency: ultrathin substrates embedded with micron-scale inverted lens arrays. ACS Photon. 10, 1775–1782 (2023).
Hyun, W. J., Park, O. O. & Chin, B. D. Foldable graphene electronic circuits based on paper substrates. Adv. Mater. 25, 4729–4734 (2013).
Polat, E. O. et al. Graphene-enabled optoelectronics on paper. ACS Photon. 3, 964–971 (2016).
Kim, M. et al. Fully-integrated, bezel-less transistor arrays using reversibly foldable interconnects and stretchable origami substrates. Nanoscale 8, 9504–9510 (2016).
Lee, J. W. et al. Soft, thin skin-mounted power management systems and their use in wireless thermography. Proc. Natl. Acad. Sci. USA 113, 6131–6136 (2016).
Li, G., Yao, Y., Ashok, N. & Ning, X. Ultra-flexible visible-blind optoelectronics for wired and wireless UV sensing in harsh environments. Adv. Mater. Technol. 6, 2001125 (2021).
Li, H. et al. Highly foldable and efficient paper-based perovskite solar cells. Sol. RRL 3, 1800317 (2019).
Qi, J. et al. A kirigami-inspired island-chain design for wearable moistureproof perovskite solar cells with high stretchability and performance stability. Nanoscale 12, 3646–3656 (2020).
Choi, M. et al. Stretchable active matrix inorganic light-emitting diode display enabled by overlay-aligned roll-transfer printing. Adv. Funct. Mater. 27, 1606005 (2017).
Ho, X., Cheng, C. K., Tan, R. L. S. & Wei, J. Screen printing of stretchable electrodes for large area LED matrix. J. Mater. Res. 30, 2271–2278 (2015).
Jin, P. et al. Fluid microchannel encapsulation to improve the stretchability of flexible electronics. Adv. Mater. Technol. 7, 2101126 (2022).
Jung, H. et al. High-resolution active-matrix micro-LED stretchable displays. J. Soc. Inf. Disp. 31, 201–210 (2023).
Jung, H. et al. Active matrix micro-LED stretchable display and technical challenges. SID Symp. Dig. Tech. Pap. 53, 517–520 (2022).
Kang, J., Kang, K., Park, J.-H., Park, K. & Lee, S.-Y. A new pixel circuit compensating for strain-induced luminance reduction in stretchable active-matrix organic light emitting diode displays. IEEE Electron Device Lett. 42, 1350–1353 (2021).
Kim, D.-H. et al. Epidermal electronics. Science 333, 838–843 (2011).
Ohmae, H. et al. Stretchable 45×80 RGB LED display using meander wiring technology. SID Symp. Dig. Tech. Pap. 46, 102–105 (2015).
Park, S.-C. et al. Millimeter thin and rubber-like solid-state lighting modules fabricated using roll-to-roll fluidic self-assembly and lamination. Adv. Mater. 27, 3661 (2015).
Van Den Brand, J. et al. Flexible and stretchable electronics for wearable health devices. Solid State Electron. 113, 116–120 (2015).
Kim, T., Lee, H., Jo, W., Kim, T. S. & Yoo, S. Realizing stretchable OLEDs: a hybrid platform based on rigid island arrays on a stress-relieving bilayer structure. Adv. Mater. Technol. 5, 2000494 (2020).
Lim, M. S. et al. Two-dimensionally stretchable organic light-emitting diode with elastic pillar arrays for stress relief. Nano lett. 20, 1526–1535 (2020).
Nam, M. et al. Highly reliable and stretchable OLEDs based on facile patterning method: toward stretchable organic optoelectronic devices. NPJ Flex. Electron. 8, 17 (2024).
Jo, M. et al. 3 d printer-based encapsulated origami electronics for extreme system stretchability and high areal coverage. ACS Nano 13, 12500–12510 (2019).
Kim, N., Kim, J., Seo, J., Hong, C. & Lee, J. Stretchable inorganic LED displays with double-layer modular design for high fill factor. ACS Appl. Mater. Interfaces 14, 4344–4351 (2022).
Kim, R.-H. et al. Waterproof AlInGaP optoelectronics on stretchable substrates with applications in biomedicine and robotics. Nat. Mater. 9, 929–937 (2010).
Uetani, K. et al. Kirigami-processed cellulose nanofiber films for smart heat dissipation by convection. NPG Asia Mater. 13, 62 (2021).
Lee, Y., Kim, B. J., Hu, L., Hong, J. & Ahn, J.-H. Morphable 3D structure for stretchable display. Mater. Today 53, 51–57 (2022).
Lee, S. et al. Printed cylindrical lens pair for application to the seam concealment in tiled displays. Opt. Express 26, 824–834 (2018).
Lee, S. et al. 3D printing-based mirrored image component for seamless modular curved-edge displays. Opt. Express 29, 14745–14756 (2021).
Han, H. J., Cho, W. J., Lee, S. J., Park, H. M. & Hwang, I. Stress-free folding hinge for foldable OLED display device. SID Symp. Dig. Tech. Pap. 52, 1336–1339 (2021).
Lee, Y. et al. A seamless auxetic substrate with a negative Poisson’s ratio of− 1. Nat. Commun. 15, 7146 (2024).
Oh, H. et al. Mechanically anisotropic stretchable and transparent composite substrates for distortion-free display. Compos. Part A Appl. Sci. Manuf. 185, 108338 (2024).
Hur, J. et al. Fully transparent and distortion-free monotonically stretchable substrate by nanostructure alignment. Adv. Mater. 37, 2414794 (2024).
Choi, J. C. et al. Bidirectional zero poisson’s ratio elastomers with self-deformable soft mechanical metamaterials for stretchable displays. Adv. Funct. Mater. 34, 2406725 (2024).
Ma, C.-H. et al. Flexible transparent heteroepitaxial conducting oxide with mobility exceeding 100 cm2 V−1 s−1 at room temperature. NPG Asia Mater. 12, 70 (2020).
Ji, C., Liu, D., Zhang, C. & Jay Guo, L. Ultrathin-metal-film-based transparent electrodes with relative transmittance surpassing 100%. Nat. Commun. 11, 3367 (2020).
Kim, W.-K. et al. Cu mesh for flexible transparent conductive electrodes. Sci. Rep. 5, 10715 (2015).
Kim, D.-J. et al. Indium-free, highly transparent, flexible Cu2O/Cu/Cu2O mesh electrodes for flexible touch screen panels. Sci. Rep. 5, 16838 (2015).
Li, H., Liu, Y., Su, A., Wang, J. & Duan, Y. Promising hybrid graphene-silver nanowire composite electrode for flexible organic light-emitting diodes. Sci. Rep. 9, 17998 (2019).
Nam, S. et al. Ultrasmooth, extremely deformable and shape recoverable Ag nanowire embedded transparent electrode. Sci. Rep. 4, 4788 (2014).
Lee, H., Sharma, R., Ha, J., Lee, H. & Yoo, S. Practically viable approach to efficient and reliable semitransparent flexible organic solar cells: face-seal encapsulation embedded with tailored color-control functionality. Adv. Energy Sustain. Res. 1, 2000020 (2020).
Li, M. et al. Origami metawall: mechanically controlled absorption and deflection of light. Adv. Sci. 6, 1901434 (2019).
Tang, Y. et al. Programmable kiri-kirigami metamaterials. Adv. Mater. 29, 1604262 (2017).
Ke, Y. et al. Adaptive thermochromic windows from active plasmonic elastomers. Joule 3, 858–871 (2019).
Gu, J. et al. Self-powered strain sensor based on the piezo-transmittance of a mechanical metamaterial. Nano Energy 89, 106447 (2021).
Lamoureux, A., Lee, K., Shlian, M., Forrest, S. R. & Shtein, M. Dynamic kirigami structures for integrated solar tracking. Nat. Commun. 6, 8092 (2015).
Evke, E. E. et al. Kirigami-based compliant mechanism for multiaxis optical tracking and energy-harvesting applications. Adv. Eng. Mater. 23, 2001079 (2021).
Martella, D., Nocentini, S., Nuzhdin, D., Parmeggiani, C. & Wiersma, D. S. Photonic microhand with autonomous action. Adv. Mat. 29, 1704047 (2017).
Ergene, E., Liman, G., Yildiz, E., Yilgor Huri, P. & Demirel, G. Folding control of hHydrogel platforms through pattern design and light illumination. ACS Appl. Polym. Mater. 3, 3272–3277 (2021).
Wang, Y. et al. Light-activated shape morphing and light-tracking materials using biopolymer-based programmable photonic nanostructures. Nat. Commun. 12, 1651 (2021).
Chen, S. et al. Electromechanically reconfigurable optical nano-kirigami. Nat. Commun. 12, 1299 (2021).
Choi, W. J. et al. Terahertz circular dichroism spectroscopy of biomaterials enabled by kirigami polarization modulators. Nat. Mater. 18, 820–826 (2019).
Chance, R., Prock, A. & Silbey, R. Molecular fluorescence and energy transfer near interfaces. Adv. Chem. Phys. 37, 1–65 (1978).
Kim, E. et al. A facile route to efficient, low-cost flexible organic light-emitting diodes: utilizing the high refractive index and built-in scattering properties of industrial-grade PEN substrates. Adv. Mater. 27, 1624–1631 (2015).
Song, J. et al. Lensfree OLEDs with over 50% external quantum efficiency via external scattering and horizontally oriented emitters. Nat. Commun. 9, 3207 (2018).
Wang, K. et al. New reversing design method for LED uniform illumination. Opt. Express 19, A830–A840 (2011).
Yang, S., Qiao, S. & Lu, N. Elasticity solutions to nonbuckling serpentine ribbons. J. Appl. Mech. 84, 021004 (2017).
Zhang, Y. et al. Buckling in serpentine microstructures and applications in elastomer-supported ultra-stretchable electronics with high areal coverage. Soft Matter 9, 8062–8070 (2013).
Arazoe, H. et al. An autonomous actuator driven by fluctuations in ambient humidity. Nat. Mater. 15, 1084–1089 (2016).
Andres, C. M., Zhu, J., Shyu, T., Flynn, C. & Kotov, N. A. Shape-morphing nanocomposite origami. Langmuir 30, 5378–5385 (2014).
Lee, Y., Moon, J., Choi, J. & Cho, M. Self-folding structural design using multiscale analysis on the light-absorption folding behaviour of polystyrene sheet. Sci. Rep. 7, 1–16 (2017).
Lee, J. H. et al. Light-driven complex 3D shape morphing of glassy polymers by resolving spatio-temporal stress confliction. Sci. Rep. 10, 10840 (2020).
Liu, Y., Shaw, B., Dickey, M. D. & Genzer, J. Sequential self-folding of polymer sheets. Sci. Adv. 3, e1602417 (2017).
Cui, J. et al. Nanomagnetic encoding of shape-morphing micromachines. Nature 575, 164–168 (2019).
Ze, Q. et al. Spinning-enabled wireless amphibious origami millirobot. Nat. commun. 13, 3118 (2022).
Kim, Y., Yuk, H., Zhao, R., Chester, S. A. & Zhao, X. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 558, 274–279 (2018).
Yuan, C. et al. 3D printed reversible shape changing soft actuators assisted by liquid crystal elastomers. Soft Matter 13, 5558–5568 (2017).
Chen, Y., Peng, R. & You, Z. Origami of thick panels. Science 349, 396–400 (2015).
Yellowhorse, A., Lang, R. J., Tolman, K. & Howell, L. L. Creating linkage permutations to prevent self-intersection and enable deployable networks of thick-origami. Sci. Rep. 8, 12936 (2018).
Bo, R., Xu, S., Yang, Y. & Zhang, Y. Mechanically-guided 3D assembly for architected flexible electronics. Chem. Rev. 123, 11137–11189 (2023).
Xue, Z., Song, H., Rogers, J. A., Zhang, Y. & Huang, Y. Mechanically-guided structural designs in stretchable inorganic electronics. Adv. Mater. 32, 1902254 (2020).
Mao, Y. et al. Programmable bidirectional folding of metallic thin films for 3D chiral optical antennas. Adv. Mater. 29, 1606482 (2017).
Yan, Z. et al. Mechanical assembly of complex, 3D mesostructures from releasable multilayers of advanced materials. Sci. Adv. 2, e1601014 (2016).
Fu, H. et al. Morphable 3D mesostructures and microelectronic devices by multistable buckling mechanics. Nat. Mater. 17, 268–276 (2018).
Kim, E. et al. A systematic approach to reducing angular color shift in cavity-based organic light-emitting diodes. Org. Electron. 48, 348–356 (2017).
Jia, Y., Liu, Z., Wu, D., Chen, J. & Meng, H. Mechanical simulation of foldable AMOLED panel with a module structure. Org. Electron. 65, 185–192 (2019).
Kim, W. et al. Controlled multiple neutral planes by low elastic modulus adhesive for flexible organic photovoltaics. Nanotechnology 28, 194002 (2017).
Nematollahisarvestani, A. & Lee, Y.-C. Y. A review on united states patents to prevent mechanical failures in foldable smartphones. J. Electron. Packag. 143, 020802 (2021).
Su, Y., Li, S., Li, R. & Dagdeviren, C. Splitting of neutral mechanical plane of conformal, multilayer piezoelectric mechanical energy harvester. Appl. Phys. Lett. 107, 041905 (2015).
Li, C. et al. Reconfigurable origami/kirigami metamaterial absorbers developed by fast inverse design and low-concentration MXene inks. ACS Appl. Mater. Interfaces 16, 42448–42460 (2024).
Liu, Z., Fang, H., Xu, J. & Wang, K. W. Cellular automata inspired multistable origami metamaterials for mechanical learning. Adv. Sci. 10, 2305146 (2023).
Li, W. et al. Triple-responsive soft actuator with plastically retentive deformation and magnetically programmable recovery. ACS Nano 17, 24042–24054 (2023).
Walker, A. & Stankovic, T. Algorithmic design of origami mechanisms and tessellations. Commun. Mater. 3, 4 (2022).
Sussman, D. M. et al. Algorithmic lattice kirigami: A route to pluripotent materials. Proc. Natl. Acad. Sci USA. 112, 7449–7453 (2015).
Choi, G. P. Computational design of art-inspired metamaterials. Nat. Comput. Sci. 4, 549–552 (2024).
Bai, Y. et al. A dynamically reprogrammable surface with self-evolving shape morphing. Nature 609, 701–708 (2022).
Li, G. et al. Color-conversion displays: current status and future outlook. Light Sci. Appl. 13, 301 (2024).
Wu, Y.-E., Tsai, C.-H., Chen, L.-Y., Chen, F.-C. & Kuo, H.-C. Current landscape of micro-LED display Industrialization. Nanomaterials 15, 693 (2025).
Panin, S. V., Bogdanov, A. A., Eremin, A. V., Buslovich, D. G. & Alexenko, V. O. Estimating low-and high-cyclic fatigue of polyimide-CF-PTFE composite through variation of mechanical hysteresis loops. Materials 15, 4656 (2022).
Hu, J. et al. An overview on fatigue of high-entropy alloys. Materials 16, 7552 (2023).
Dong, Z. et al. Microfabrication of functional polyimide films and microstructures for flexible MEMS applications. Microsyst. Nanoeng. 9, 31 (2023).
Zhang, N. et al. 3D printing of micro-nano devices and their applications. Microsyst. Nanoeng. 11, 35 (2025).
Feng, F. et al. High-power AlGaN deep-ultraviolet micro-light-emitting diode displays for maskless photolithography. Nat. Photon. 19, 101–108 (2025).
Autumn, K. et al. Evidence for van der Waals adhesion in gecko setae. Proc. Natl. Acad. Sci. USA 99, 12252–12256 (2002).
Clapham, P. & Hutley, M. Reduction of lens reflexion by the “Moth Eye” principle. Nature 244, 281–282 (1973).
Deng, B. et al. Inverse design of mechanical metamaterials with target nonlinear response via a neural accelerated evolution strategy. Adv. Mater. 34, 2206238 (2022).
Winter, G., Périaux, J., Galán, M. & Cuesta, P. Genetic Algorithms in Engineering and Computer Science. (John Wiley & Sons, New Jersey. 1996).
Brown, N. K., Garland, A. P., Fadel, G. M. & Li, G. Deep reinforcement learning for engineering design through topology optimization of elementally discretized design domains. Mater. Des. 218, 110672 (2022).
Alderete, N. A., Pathak, N. & Espinosa, H. D. Machine learning assisted design of shape-programmable 3D kirigami metamaterials. Npj Comput. Mater. 8, 191 (2022).
Kudela, J. & Matousek, R. Recent advances and applications of surrogate models for finite element method computations: a review: J. Kudela, R. Matousek. Soft Comput. 26, 13709–13733 (2022).
Zhilyaev, I., Krushinsky, D., Ranjbar, M. & Krushynska, A. O. Hybrid machine-learning and finite-element design for flexible metamaterial wings. Mater. Des. 218, 110709 (2022).
Chang, S. et al. Flexible and stretchable light-emitting diodes and photodetectors for human-centric optoelectronics. Chem. Rev. 124, 768–859 (2024).
Cho, J. et al. Nanoscale origami for 3D optics. Small 7, 1943–1948 (2011).
Xu, W. et al. Reversible MoS2 origami with spatially resolved and reconfigurable photosensitivity. Nano Lett. 19, 7941–7949 (2019).
Hou, Y. et al. Programmable and surface-conformable origami design for thermoelectric devices. Adv. Sci. 11, 2309052 (2024).
Chen, X. et al. Wrap-like transfer printing for three-dimensional curvy electronics. Sci. Adv. 9, eadi0357 (2023).
Xu, S. et al. Assembly of micro/nanomaterials into complex, three-dimensional architectures by compressive buckling. Science 347, 154–159 (2015).
Wang, W. et al. Kirigami/origami-based soft deployable reflector for optical beam steering. Adv. Funct. Mater. 27, 1604214 (2017).
Lim, S. et al. Assembly of foldable 3D microstructures using graphene hinges. Adv. Mater. 32, 2001303 (2020).
Faraji-Dana, M. et al. Hyperspectral imager with folded metasurface optics. ACS Photon. 6, 2161–2167 (2019).
He, S. et al. A kirigami-based reconfigurable metasurface for selective electromagnetic transmission modulation. Npj Flex. Electron. 8, 48 (2024).
Luo, H. et al. Reconfigurable high-efficiency metadevice using Kirigami-inspired phase gradient metasurfaces. Results Phys. 53, 106949 (2023).
Jiao, R. et al. Vertical serpentine interconnect-enabled stretchable and curved electronics. Microsyst. Nanoeng. 9, 149 (2023).
Keum, K., Yang, S., Kim, K. S., Park, S. K. & Kim, Y.-H. Recent progress of stretchable displays: a comprehensive review of materials, device architectures, and applications. Soft Sci. 4, https://doi.org/10.20517/ss.2024.26 (2024).
Tang, L. et al. Flexible threshold switching selectors with ultrahigh endurance based on halide perovskites. Adv. Electron. Mater. 8, 2100771 (2022).
Zhao, C., Wang, H., Gu, X., Zhang, W. & Li, Y. Ultrathin WOx interfacial layer improving the ferroelectricity and endurance of Hf0. 5Zr0. 5O2 thin films on polyimide. J. Materiomics 11, 100942 (2025).
Guo, J. et al. Kirigami-inspired 3D printable soft pneumatic actuators with multiple deformation modes for soft robotic applications. Soft Robot. 10, 737–748 (2023).
Rafsanjani, A., Zhang, Y., Liu, B., Rubinstein, S. M. & Bertoldi, K. Kirigami skins make a simple soft actuator crawl. Sci. Robot. 3, eaar7555 (2018).
Venkatesh, S., Sturm, D., Lu, X., Lang, R. J. & Sengupta, K. Origami microwave imaging array: metasurface tiles on a shape-morphing surface for reconfigurable computational imaging. Adv. Sci. 9, 2105016 (2022).
Acknowledgements
D.G.L., S.B.K., J.H.K., and S.Y. would like to acknowledge the financial support from the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (No. RS-2024-00416978 and RS-2024-00344386).
Author information
Authors and Affiliations
Contributions
D.G.L., S.B.K., and J.H.K. analyzed all of the data, and D.G.L., S.B.K., J.H.K., and S.Y. wrote the manuscript and discussed the results of the manuscript. D.G.L. and S.B.K. contributed equally as the leading authors.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial or non-financial interests.
Peer review
Peer review information
Nature Communications thanks the anonymous reviewer(s) for their contribution to the peer review of this work.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Source Data
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Lee, D., Kim, SB., Kim, J. et al. Advances, challenges and prospects of origami and kirigami optoelectronics. Nat Commun 17, 754 (2026). https://doi.org/10.1038/s41467-025-68217-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41467-025-68217-y
