
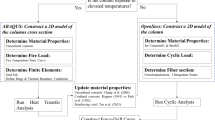
Abstract
In a scaled model test for reinforced concrete (RC) structures, the stress-strain relationship of the concrete of the scaled model is often quite different from that of ordinary concrete which is used for the prototype, while that of the reinforcement is typically the same for both the prototype and scaled model. The difference in the material properties of the reinforcement and concrete affects the behavior of the scaled model, which needs to be properly considered in order to accurately predict the prototype’s response from the scaled model’s response. In this study, a new similitude law that can effectively consider the difference in material properties between the prototype and scaled model is proposed and verified through numerical simulations with RC columns. The simulation results clearly show that the new similitude law can predict the prototype’s response better than other similitude laws proposed in previous studies.
Similar content being viewed by others
Introduction
Scaled model testing is a practical alternative to full-scale testing, considering limitations in testing equipment capacity and high costs for fabricating and testing full-scale specimens. Accordingly, it has been broadly used for testing various types of reinforced concrete (RC) members such as beams1,2columns3,4,5,6frame7 walls8,9 and slabs under impact loading10.
For designing RC scaled models, it is essential to select appropriate model concrete and reinforcements such that their material properties satisfy the given similitude requirements. Otherwise, the behavior of the scaled model does not properly represent that of the full-scale prototype, leading to errors in predicting the prototype’s response from that of the scaled model. Various materials, including mortar and gypsum, are used for model concrete11,12 of which the properties in terms of compressive strength, modulus of elasticity, and stress-strain relationship, are different from those of ordinary concrete. In contrast, steel is often used for both prototype and model reinforcements12 indicating that they have either the same or very similar material properties.
Due to the difference in material properties between the prototype and model concretes, it is challenging to design RC scaled models that satisfies all similitude requirements defined by Buckingham’s Pi theorem13 which is called a true model. Instead, a distorted model in which some of the requirements are intendedly not satisfied can be used12. If the requirement on strain is not strictly satisfied, the strains in the prototype and model are no longer equal, which is called strain distortion.
Even with strain distortion, the behavior of the prototype can be predicted with reasonable accuracy from that of the distorted scaled model using appropriate similitude laws. In such laws, the difference in material properties between the prototype and scaled model, particularly in the stress-strain relationship, are often expressed by using the scale factor of stress (\(\:{s}_{\sigma\:}\)) and strain ratio (\(\:{\epsilon\:}_{r}\)) (see Fig. 1). Sato et al.14 showed that a distorted model can be effectively used to predict the response of the RC members subject to extreme impact loads.
Several similitude laws for a RC scaled model with strain distortion have been proposed in the literature. Krawinkler and Moncarz15 proposed a similitude law (hereafter denoted as the K-M law), where the \(\:{s}_{\sigma\:}\) and \(\:{\epsilon\:}_{r}\) are used for defining scale factors of other physical quantities (see Table 1). With the K-M law, the response of the prototype can be accurately predicted from that of the scaled model, provided that the difference in the material properties between the prototype and scaled model can be fully represented by a single pair of \(\:{s}_{\sigma\:}\) and \(\:{\epsilon\:}_{r}\). This is the case when each of the prototype and the scaled model is made of a single material.
For RC structures, however, the \(\:{s}_{\sigma\:}\) and \(\:{\epsilon\:}_{r}\) can be independently defined for steel reinforcement (\(\:{s}_{\sigma\:s}\), \(\:{\epsilon\:}_{rs}\)) and for concrete (\(\:{s}_{\sigma\:c}\), \(\:{\epsilon\:}_{rc}\)), where the subscripts \(\:s\) and \(\:c\) denote that the \(\:{s}_{\sigma\:}\) and \(\:{\epsilon\:}_{r}\) are for steel and concrete, respectively. Due to the difference in the material properties of prototype and model concretes, while the same steel is often used for both prototype and model, it can be generally stated that \(\:{s}_{\sigma\:c}\ne\:{s}_{\sigma\:s}\) and \(\:{\epsilon\:}_{rc}\ne\:{\epsilon\:}_{rs}\). Since the K-M law does not provided a systematic method for addressing the differences in \(\:{s}_{\sigma\:}\) and \(\:{\epsilon\:}_{r}\) for both materials, it is not applicable to RC structures.
Although, several other similitude laws have been proposed in the literature4,16,17,18,19 their accuracy has not been rigorously verified and they provided a limited accuracy in predicting the prototype’s response, partly due to that those laws are based on the K-M law. In this study, therefore, a new similitude law is proposed for RC structures that properly account for the difference in material properties between the prototype and scaled model. The following sections provide a detailed explanation of the proposed similitude law, along with numerical simulations conducted to validate its effectiveness. In the numerical simulation, the nonlinear responses of a prototype RC column and its scaled model are analytically obtained, and the superior performance and robustness of the proposed similitude law are validated by comparing the predicted responses for the prototype using the existing similitude laws and the proposed one.
Introduction
Concepts of the scale factor of stress and strain ratio
Similitude law defines the relationship for a given physical quantity between the prototype (\(\:{q}_{p}\)) and scaled model (\(\:{q}_{m}\)), expressed as follows:
where, the ratio \(\:{s}_{q}\) is often referred to as the scale factor, while the corresponding term for strain is typically called the strain ratio. Accordingly, the scale factors of stress (\(\:{s}_{\sigma\:}\)) and the strain ratio (\(\:{\epsilon\:}_{r}\)) can be defined as follows:
where, \(\:\sigma\:\) and \(\:\epsilon\:\) denote stress and strain, respectively (see Fig. 1). \(\:{s}_{\sigma\:}\) is often defined as the ratio of the peak stress of the prototype to that of the scaled model in their stress-strain curves. If the same material is used for both the prototype and the scaled model, \(\:{s}_{\sigma\:}\) and \(\:{\epsilon\:}_{r}\) become unity. If either \(\:{s}_{\sigma\:}\) or \(\:{\epsilon\:}_{r}\) is not unity, the K-M law of which scale factors are formulated by using the scale factor of stress (\(\:{s}_{\sigma\:}\)) and the strain ratio (\(\:{\epsilon\:}_{r}\)) (see the third column of Table 1) is available.

Scale factor of stress (\(\:{s}_{\sigma\:}\)) and strain ratio (\(\:{\epsilon\:}_{r}\)) for given stress-strain relationships for the prototype and the scale model
For RC structures, the \(\:{s}_{\sigma\:}\) and \(\:{\epsilon\:}_{r}\) can be independently defined for reinforcement and concrete, i.e. \(\:{s}_{\sigma\:s}\) and \(\:{\epsilon\:}_{rs}\) for reinforcement, and \(\:{s}_{\sigma\:c}\) and \(\:{\epsilon\:}_{rc}\) for concrete. However, the K-M law provides no systematic method for determining \(\:{s}_{\sigma\:}\) and \(\:{\epsilon\:}_{r}\) for RC structure. A simple approach is to set the pair (\(\:{s}_{\sigma\:}\), \(\:{\epsilon\:}_{r}\)) to be either (\(\:{s}_{\sigma\:s}\), \(\:{\epsilon\:}_{rs}\)) or (\(\:{s}_{\sigma\:c}\), \(\:{\epsilon\:}_{rc}\)), but this approach has not been rigorously verified in the literation.
Similitude laws in previous studies and their limitations
As the K-M law is not suitable for RC structures, researchers proposed modified similitude laws based on the K-M law4,16,17,18. Table 1 presents the similitude law of Kim et al.4 (hereafter denoted as the Kim’s law) as a representative of the other similitude laws. In the Kim’s law, a new parameter called the equivalent modulus ratio is introduced, defined as below:
It needs to be noted that the scale factor of time (\(\:{s}_{t}\)) in many of the existing similitude laws4,16,17,18 is defined as the square root of the scale factor of length (i.e., \(\:{s}_{t}={s}_{L}^{1/2}\)), while the K-M law considers the effect of the strain ratio (\(\:{\epsilon\:}_{r}\)), i.e., \(\:{s}_{t}={s}_{L}^{1/2}{\epsilon\:}_{r}^{1/2}\) as shown in Table 1. To demonstrate the influence of the \(\:{\epsilon\:}_{r}\) in the \(\:{s}_{t}\), simple numerical simulations were conducted for columns, as shown in Fig. 2a, by applying the K-M law and the Kim’s law. In the simulations, it was assumed that both the prototype and scaled model have the same size, i.e., the \(\:{s}_{L}\) is unity, and are each made of a single linear elastic material, and therefore have different elastic modulus. The \(\:{s}_{t}\) and \(\:{\epsilon\:}_{r}\) were assumed to be 1.0 and 2.0, respectively, such that the elastic modulus of the prototype is 2 times larger than that of the scaled model. The \(\:{E}_{r}\) is 0.5 according to Eq. (3), and the \(\:{s}_{t}\) become \(\:\sqrt{2}\) and 1 for the K-M law and the Kim’s law, respectively.

Numerical simulation results for the prediction using the K-M law and the Kim’s law: (a) dimensions and material properties of the prototype and the scaled model; (b) comparison of time history of displacements; (c) comparison of frequency domain responses.
Figure 2b, c show the responses of the columns under the 1940 El-Centro earthquake, where the response of the prototype is compared with the responses predicted from that of the scaled model using the K-M laws and the Kim’s law. The results show that the K-M law can accurately predict the prototype’s response, while the Kim’s law exhibits significant prediction errors. Furthermore, the peak frequency predicted by the Kim’s law is significantly lower than that of the prototype. The results in Fig. 2 clearly demonstrates the importance of incorporating the strain ratio in the scale factor of time.
Consideration of variation in strain ratio
In previous studies, the applicability of the K-M law has not been verified for cases where the strain ratio varies during the testing of a scaled model. This applicability can be assessed by investigating the relationship between the scale factor of stiffness (\(\:{s}_{k}\)) and the strain ratio (\(\:{\epsilon\:}_{r}\)), expressed as below:
where, \(\:{k}_{p}\) and \(\:{k}_{m}\) are the stiffness of the prototype and the scaled model, respectively. For a given displacement \(\:u\left(t\right)\) and force \(\:F\left(t\right)\) at time \(\:t\), the stiffness \(\:k\) can be defined in two different ways:
where, \(\:{k}_{s}\left(t\right)\) and \(\:{k}_{t}\left(t\right)\) denote the secant and tangent stiffnesses, respectively. \(\:\varDelta\:F\left(t\right)\) and \(\:\varDelta\:u\left(t\right)\) denote the increments of force and displacement at time \(\:t\), respectively. By substituting Eq. (5) into Eq. (4), the strain ratios for the secant and tangent stiffnesses (i.e., \(\:{\epsilon\:}_{r,ks}\left(t\right)\) and \(\:{\epsilon\:}_{r,kt}\left(t\right)\), respectively) can be formulated as follows:
where, the subscripts \(\:p\) and \(\:m\) denote the values for the prototype and the scaled model, respectively. If both the prototype and the scaled model are each made of a single material, the two strain ratios become the same and constant. For typical RC structures where \(\:{s}_{\sigma\:c}\ne\:{s}_{\sigma\:s}\) and \(\:{\epsilon\:}_{rc}\ne\:{\epsilon\:}_{rs}\), however, the two strain ratios become different and vary during testing. Therefore, it can be concluded that the K-M law is not suitable for RC structures, making the K-M law unsuitable as its single strain ratio \(\:{\epsilon\:}_{r}\) cannot account for the differences and variations in time.
Proposed similitude law
In this study, a new similitude law is proposed to account for the difference between the secant and tangent strain ratios (\(\:{\epsilon\:}_{r,ks}\left(t\right)\) and \(\:{\epsilon\:}_{r,kt}\left(t\right)\)) and their variation during testing. The scale factors of the proposed similitude law are listed in Table 1. Unlike the K-M law, which uses a single strain ratio (\(\:{\epsilon\:}_{r}\)), the proposed similitude law incorporates both \(\:{\epsilon\:}_{r,ks}\left(t\right)\) and \(\:{\epsilon\:}_{r,kt}\left(t\right)\) to formulate the scale factors. Specifically, the scale factor of displacement (\(\:{s}_{u}\)) and that of the increment of the displacement (\(\:{s}_{\varDelta\:u}\)) are determined by using the secant and tangent strain ratio, respectively, as follows:
Unlike \(\:{\epsilon\:}_{r,ks}\left(t\right)\) and \(\:{\epsilon\:}_{r,kt}\left(t\right)\), the scale factor of stress (\(\:{s}_{\sigma\:}\)) is defined to be constant. Accordingly, the scale factor of force (\(\:{s}_{F}\)) is also constant such that the force and the increment of force for the scaled model (\(\:{F}_{m}\left(t\right)\) and \(\:\varDelta\:{F}_{m}\left(t\right)\), respectively) in Eq. (7) can be substituted with the force and the increment of force for the prototype (\(\:{F}_{p}\left(t\right)\) and \(\:\varDelta\:{F}_{p}\left(t\right)\), respectively) by multiplying the scale factor of force (i.e., \(\:{s}_{F}={s}_{\sigma\:}{s}_{L}^{2}\)).
Other scale factors are also defined such that either the \(\:{\epsilon\:}_{r,ks}\left(t\right)\) or \(\:{\epsilon\:}_{r,kt}\left(t\right)\)is incorporated into their formulations. The scale factor of acceleration (\(\:{s}_{a}\)) is defined to be unity like the K-M law. Accordingly, the scale factor of time increment (\(\:{s}_{\varDelta\:t}\)) and the scale factor of velocity (\(\:{s}_{v}\)) are determined based on the dimensional analysis as follows:
The secant and tangent strain ratios are coupled together so that the secant strain ratio can be expressed using the tangent strain ratio as follows:
Similarly, the scale factor of time \(\:{s}_{t}\) can be calculated from \(\:{s}_{\varDelta\:t}\) as follows:
It should be noted that, as the \(\:{\epsilon\:}_{r,ks}\left(t\right)\) and \(\:{\epsilon\:}_{r,kt}\left(t\right)\) are time-varying, any scale factors formulated using the \(\:{\epsilon\:}_{r,ks}\left(t\right)\) and \(\:{\epsilon\:}_{r,kt}\left(t\right)\) are also time-varying. Additionally, as \(\:{s}_{\varDelta\:t}\) is related to the \(\:{\epsilon\:}_{r,kt}\left(t\right)\), the time step length (\(\:\varDelta\:t\)) of an input ground motion used for the scaled model needs to be adjusted based on the variation of the \(\:{\epsilon\:}_{r,kt}\left(t\right)\) during testing of the scaled model, even though the time step length of the original input ground motion for the prototype is constant.
In summary, the proposed similitude law incorporates the tangent strain ratio into the scale factor of time, thereby addressing the errors in time and frequency observed in the Kim’s law as shown in Fig. 2. Moreover, by incorporating two distinct strain ratios, the proposed similitude law accounts for differences in material properties between the prototype and scaled model as well as their time-dependent variation during testing.
Numerical verifications of the proposed similitude law
For verifying the proposed similitude law, dynamic tests for a full-scale RC column and its scaled model are numerically simulated using OpenSees20 considering the proposed similitude law, the K-M law, and the Kim’s law.
Target RC column and the scaled model
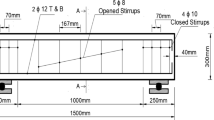
Figure 3 compares the dimensions of the full-scale prototype and the scaled model. The scale factor of length (\(\:{s}_{L}\)) was assumed to be \(\:1/4\). The scale factor of stress and the strain ratio for concrete (\(\:{s}_{\sigma\:c}\) and \(\:{\epsilon\:}_{rc}\)) were assumed to be 0.8 and 1.5, respectively. The scale factor of stress and the strain ratio for steel reinforcement (\(\:{s}_{\sigma\:s}\) and \(\:{\epsilon\:}_{rs}\)) were assumed to be 1.0 and 1.1, respectively. Table 2; Fig. 4 show the material properties and the corresponding stress-strain relationships.

Dimensions of the prototype and the scaled model.

Stress–strain relationships of the prototype and the scaled model: (a) for steel reinforcement; (b) for concrete.
For all similitude laws considered, the scale factor of concrete (= 0.8) was used as the scale factor of stress (i.e., \(\:{s}_{\sigma\:}=0.8\)). In order to consider the influence of the difference in \(\:{s}_{\sigma\:s}\) and \(\:{s}_{\sigma\:c}\), the area of longitudinal reinforcements of the scaled model (\(\:{A}_{s,m}\)) was determined as follows12:
where \(\:{A}_{s,p}\) denotes the area of the longitudinal reinforcements of the prototype. The lumped mass at the top of the prototype was assumed to be 20 tons, resulting in the prototype’s natural frequency to be about 3.0 Hz.
As the K-M law does not provide a systematic method for determining the strain ratio (\(\:{\epsilon\:}_{r}\)) for RC structures, the strain ratio for the K-M law was determined to be either the strain ratio for steel reinforcement (hereafter denoted as the K-M law with \(\:{\epsilon\:}_{rs}\)) or that for concrete (hereafter denoted as the K-M law with \(\:{\epsilon\:}_{rc}\)) so that the prediction accuracy of the K-M law can be investigated depending on how to determine the \(\:{\epsilon\:}_{r}\).
Procedure for calculating the tangent strain ratio
The proposed similitude law requires the calculation of tangent strain ratio (\(\:{\epsilon\:}_{r,kt}\left(t\right)\)) during the testing of the scaled model. The procedure for obtaining the \(\:{\epsilon\:}_{r,kt}\left(t\right)\) for the numerical simulation of this study is based on an iterative method, where the dynamic response of the scaled model is combined with an additional procedure for calculating the tangent strain ratio at each time step of the analysis. Figure 5 shows a flowchart for this procedure. At the beginning of the \(\:i\)-th step of the simulation with \(\:j=\) 1, the tangent strain ratio, \(\:{\epsilon\:}_{r,kt,i}^{j}\), is assumed to be 1 or the converged tangent strain ratio at the (\(\:i\)-1)-th step. Then, the time step length for the ground acceleration of the scaled model at the i-th step (\(\:\varDelta\:{t}_{m,i}\)) can be determined based on the definition of the scale factor of time increment (\(\:{s}_{\varDelta\:t}\)):

Procedure for calculating the tangent strain ratio.
where, \(\:\varDelta\:{t}_{p,i}\) is the time step length for the ground acceleration of the prototype, which is constant in general. With the calculated \(\:\varDelta\:{t}_{m,i}\) from Eq. (12), \(\:{F}_{m,i}\) and \(\:{u}_{m,i}\) can be obtained by conducting an experimental test such as the hybrid simulation for scaled models.
As provided in Eq. (6), the prototype responses, i.e., \(\:{F}_{p,i}\) and \(\:{u}_{p,i}\) are required for calculating the tangent strain ratio. The prototype force (\(\:{F}_{p,i}\)) corresponding to the scaled model force (\(\:{F}_{m,i}\)) is obtained from the definition of the scale factor of force (\(\:{s}_{F}\)):
The prototype’s displacement, \(\:{u}_{p,i}\), corresponding to \(\:{F}_{p,i}\) is found from the numerical model of the prototype structure based on the given material properties. \(\:{u}_{p,i}\) is numerically obtained by applying \(\:{F}_{p,i}\) to the prototype structure shaped with \(\:{u}_{p,i-1}\) and adding the incremental displacement of \(\:\varDelta\:{u}_{p,i}\) to \(\:{u}_{p,i-1}\). Then, a new tangent strain ratio is calculated by using Eq. (6), which is given as follows:
Once \(\:{\epsilon\:}_{r,ki,i}^{j+1}\) is obtained, it is compared with the previous tangent strain ratio, \(\:{\epsilon\:}_{r,kt,i}^{j}\). If their difference is smaller than a prescribed tolerance limit (e), e.g. \(\:e=\) 10− 4 in this study, the new tangent strain ratio is considered to be converged; otherwise, all of the above-mentioned procedures are repeated until the new tangent strain ratio is converged.
Input ground motion
Figure 6 shows the original acceleration time history of 1940 El-Centro earthquake, which is used for the numerical simulation of this study. It consists of a total of 1,550 steps with a time step length of 0.02 s. For the prototype, the original time step length of 0.02 s was used, while the time step length for the scaled model was determined based on the given similitude law.

Ground accelerations of the 1940 El-Centro earthquake.
Accordingly, the corresponding time step length for the Kim’s law was determined to be 0.01 s, which is the square root of the scale factor of length (\(\:{s}_{L}=1/4\)) multiplied by 0.02 s as given in Table 1. For the K-M law, the time step length was further adjusted by multiplying the square root of the strain ratio (\(\:{\epsilon\:}_{r}\)), which was either the strain ratio for steel reinforcement or concrete, to the time step length of the Kim’s law. In the proposed similitude law, the time step length was not constant, but variable, depending on the variation of the tangent strain ratio as given in Eq. (8).
Simulation protocol
As shown in Fig. 5, the proposed similitude law requires the modelling of the prototype structure to identify the tangent strain ratio. Thus, the prediction accuracy of the proposed method depends on how closely the prototype modelling is made to the actual prototype structure. In order to investigate the prediction accuracy of each similitude law, some errors were intentionally added to the scale factor of stress and the strain ratio, then the predicted responses from each similitude law are compared with the actual responses of the prototype structure. The added errors can be also viewed as a part of uncertainties of the prototype structure.
Table 3 summarizes the assumed and actual values for the numerical simulation of this study. The errors in the assumed values were set to be ± 15% of the actual value. For example, for the actual value of 0.8 for \(\:{s}_{\sigma\:c}\), three assumed values of 0.8 (same as the actual value), 0.68 (15% smaller than the actual value), and 0.92 (15% greater than the actual value) were used. In the same manner, three assumed values for each of \(\:{s}_{\sigma\:s}\), \(\:{\epsilon\:}_{rs}\), and \(\:{\epsilon\:}_{rc}\) were used. Consequently, there are 81 (= 3 × 3 × 3 × 3) simulation scenarios for each similitude law. In addition, the input ground motion was scaled to be SF = 0.25, 0.50, 0.75, 1.00, and 1.25, where SF is the scale factor for the intensity of earthquake ground motion, to investigate the effect of nonlinear structural response on the prediction accuracy of each similitude law. The equation of motion for each numerical simulation was solved using the Newmark method21.
Once the analysis for scaled model is completed, the predicted response is determined by applying a similitude law to the response of scaled model, which is then compared with the actual prototype response. The error comparisons were made using the normalized root-mean-square (NRMS) error, which is defined as follows:
where, \(\:{u}_{i}\) and \(\:{\stackrel{\sim}{u}}_{i}\) denote the prototype’s and predicted displacements at the \(\:i\)-th time step, respectively, \(\:{u}_{p,max}\) denotes the maximum displacement of the prototype, and \(\:N\) denotes the total number of samples. The smaller NRMS error indicates a better prediction accuracy.
Simulation results and discussion
Figures 7, 8, 9, 10, 11 and 12 shows the results for the cases with the earthquake scale factors of SF = 0.25 and SF = 1.25, where the predominant elastic and inelastic behaviors in longitudinal reinforcements are clearly shown, respectively. In those figures, the black line shows the prototype’s response (denoted as ‘Prototype’), while the red line shows the predicted response with the exact scale factors and strain ratios (denoted as ‘Exact’). The remaining predicted responses with the ± 15% errors in the scale factors and strain ratios were all plotted with grey lines (denoted as ‘Others’).

Predicted displacements compared with the actual displacements of the prototype (SF = 0.25): (a) K-M law with \(\epsilon_{rs}\); (b) K-M law with \(\epsilon_{rc}\); (c) Kim’s law; (d) proposed similitude law

Frequency responses of predicted displacements compared with the actual frequency responses of the prototype (SF = 0.25): (a) K-M law with \(\epsilon_{rs}\); (b) K-M law with \(\epsilon_{rc}\); (c) Kim’s law; (d) proposed similitude law

Predicted force-displacement relationships compared with the actual force-displacement relationship of the prototype (SF = 0.25): (a) K-M law with \(\epsilon_{rs}\); (b) K-M law with \(\epsilon _{rc}\); (c) Kim’s law; (d) proposed similitude law

Predicted displacements compared with the actual displacements of the prototype (SF = 1.25): (a) K-M law with \(\epsilon_{rs}\); (b) K-M law with \(\epsilon_{rc}\); (c) Kim’s law; (d) proposed similitude law

Frequency responses of predicted displacements compared with the actual frequency responses of the prototype (SF = 1.25): (a) K-M law with \(\epsilon_{rs}\); (b) K-M law with \(\epsilon_{rc}\); (c) Kim’s law; (d) proposed similitude law

Predicted force-displacement relationships compared with the actual force-displacement relationship of the prototype (SF = 1.25): (a) K-M law with \(\epsilon_{rs}\); (b) K-M law with \(\epsilon_{rc}\); (c) Kim’s law; (d) proposed similitude law
The figures show that the proposed similitude law can accurately predict the prototype’s response when the scale factors for stress and the strain ratios are exactly given, while the K-M law and the Kim’s law show some appreciable errors, especially when the pre-yield response is dominant as shown in Figs. 7 and 8, and 9. Moreover, the Kim’s law shows a frequency shift in the frequency domain, similar to the result of Fig. 2.
When the post-yield response is dominant (Figs. 10 and 11, and 12), the predicted responses from the three similitude laws have good agreements with the prototype response, although the K-M law with \(\:{\epsilon\:}_{rc}\) has some notable errors. This is because the time scale factor in the K-M law was implemented with the concrete strain ratio, which has a limitation to describe the status where the post-yield response is mainly governed by the yielding of steel reinforcements. The third column of Table 4 provides the NRMS errors under earthquakes with various earthquake scale factors when the exact scale factors for stress and strain ratios are used. These NRMS errors are also plotted in Fig. 13a, where the superior performance of the proposed similitude law is clearly shown. The K-M law and the Kim’s law have notable errors although the exact scale factors and the strain ratios are used, while the proposed similitude law has minimal NRMS errors over the wide range of earthquake responses.

Comparison of NRMS errors: (a) with exact scale factors and strain ratios; (b) with errors in scale factors and strain ratios (mean values for 80 simulation cases).
Table 4 also provides the mean values of the NRMS errors for the entire simulation cases except for the one with all exact scale factors for stress and the strain ratios (i.e., the mean values of the NRMS errors from the 80 simulation scenarios). Graphical illustration of these results is provided in Fig. 13b. Basically, Fig. 13b shows the performance of each similitude law when the errors are introduced into the scale factors and the strain ratios, which can represent the performance under uncertainties that are likely to exist in the real prototype structure. It was shown that the proposed similitude law can perform well whether the system has the nonlinear response or not, while the K-M law and the Kim’s law have large prediction errors, especially when the pre-yield response is dominant. It was also demonstrated that the K-M law with \(\:{\epsilon\:}_{rs}\) works well at larger earthquake intensities where the nonlinearity associated with the yield of steel reinforcements is predominant. On the other hand, the K-M law with \(\:{\epsilon\:}_{rc}\) performed better than the K-M law with \(\:{\epsilon\:}_{rs}\) when the pre-yield response is dominant. The Kim’s law worked well during the post-yield response, but its performance was poor when the pre-yield response is dominant.
Figure 14 shows the tangent strain ratio of the proposed similitude law, calculated by the procedure presented in Section “Procedure for calculating the tangent strain ratio”, when the exact values for the scale factors and the strain ratios are used. In Fig. 14, ‘C’ and ‘Y’ denote the points where the concrete crack and reinforcement yielding are initiated, respectively. Note that the initial tangent strain ratios are identical for both cases with SF = 0.25 and 1.25. Once the concrete crack initiates, the tangent strain ratio decreases suddenly and becomes stable with some fluctuations thereafter. When the post-yield response is dominant (i.e., SF = 1.25), the fluctuation is made around 1.12, while it is around 1.22 when the pre-yield response is dominant (i.e., SF = 0.25).

Variation of the tangent strain ratio of the proposed similitude law (‘C’ and ‘Y’ denote the points where concrete crack and yielding of longitudinal reinforcement occur, respectively): (a) the case with SF = 0.25; (b) the case with SF = 1.25.
This differences in the calculated tangent strain ratio results from changes in the contribution of the concrete and steel reinforcement to the entire stiffness of the RC column. As both materials contribute to the stiffness, the initial tangent strain ratio becomes an intermediate value (≈ 1.4) between the strain ratio for concrete (= 1.5) and that for steel reinforcement (= 1.1). After the crack initiation in the concrete, the contribution of the concrete decreases as the crack propagates through the column’s cross-section, while the contribution of the steel reinforcement is maintained, making the tangent strain ratio close to the strain ratio for steel reinforcement. As can be checked from Fig. 7, the maximum displacement occurred at around 3 s for the case with SF = 0.25. Thus, the tangent strain ratio becomes relatively stable after the peak, as the damage on the column does not much increase and the contribution of the concrete and steel reinforcement is not much changed. When SF = 1.25, the propagation of crack and its severity are much more significant than the case with SF = 0.25, resulting in the contribution of concrete to be much smaller. Therefore, the tangent strain ratio is closer to the strain ratio for steel reinforcement after the maximum displacement response around 2 s (see Fig. 10).
The variation of the tangent strain ratio shown in Fig. 14 also explains the higher prediction accuracy of the K-M law with \(\:{\epsilon\:}_{rs}\) and the Kim’s law when the post-yield response is dominant. As shown in the simple verification example presented in Fig. 2, the prediction accuracy decreases when the strain ratio used for determining the scale factor of time (\(\:{s}_{t}\)) is not proper. It should be noted that the strain ratio used for determining \(\:{s}_{t}\) in the K-M law with \(\:{\epsilon\:}_{rs}\) is 1.1, which is close to the stable tangent strain ratio of the proposed law after the reinforcement yielding (= 1.12) when SF = 1.25. It is noteworthy that strain ratio is not used for \(\:{s}_{t}\) in the Kim’s law, but it can be interpreted as that a default strain ratio of 1.0 is used for \(\:{s}_{t}\) in the Kim’s law. All of these strain ratios are close to the actual strain ratio for steel reinforcement (= 1.1), subsequently resulting in the satisfactory performance when the post-yield response from steel reinforcement is dominant. When the pre-yield response is dominant (i.e., SF = 0.25), the stable tangent strain ratio of the proposed law after concrete crack is about 1.22, which is a little bit deviated from the actual strain ratios of steel reinforcement (1.1) as well as concrete (1.5). Therefore, the K-M law based on the strain ratio either of 1.1 and 1.5 would have a limitation to describe a status where the contribution from both concrete and steel reinforcement is substantial. This why the proposed similitude law performs better than the existing method in such a case.
Conclusions
In this study, a new similitude law that can properly consider the variation of strain ratio and the difference in material properties between the prototype and the scaled model was proposed. In the proposed similitude law, two strain ratios, i.e., the secant and tangent strain ratios, were newly defined and incorporated into the scale factors such that the variation of strain ratio during the test of scaled model can be properly considered.
The proposed similitude law was verified through the numerical simulations with RC cantilever columns, where the existing K-M law and Kim’s law were used for comparison with the proposed method. Various intensities for the input earthquake ground motion were used to simulate the pre- and post-yield responses of the RC column. It was demonstrated that the proposed similitude law can perform well under both pre- and post-yield responses, while the existing methods have notable prediction errors especially when the pre-yield response is dominant. It was also found that the tangent strain ratio substantially changes when the concrete crack or steel reinforcement yielding occurs. Existing methods were not able to capture the change properly because the strain ratio in the existing methods is assumed to be constant. Unlike the existing methods, the variation of tangent strain ratio is formulated in the proposed similitude law, making the proposed similitude law adaptable to the response during the test and resulting in a better prediction than the existing methods over the wide range of structural responses; Therefore, it is expected that the response of prototype RC structures can be better predicted using the proposed similitude law.
While this paper focuses solely on the numerical verification of the proposed similitude law, it has also been experimentally validated. Further details on the experimental verification can be found elsewhere22. For the application of the proposed similitude law to actual scaled model testing, it is essential to accurately estimate the secant and tangent strain ratio. It should be noted that the iterative procedure presented in Fig. 5 was developed for numerical verification purposes and requires significant computational effort due to its iterative nature, making it impractical for actual scaled model testing. In the experimental validations22a simplified method that does not involve iterative calculations was used to determine the secant and tangent strain ratio during the tests. Nevertheless, further research needs to be carried out to develop a more computationally efficient procedure to facilitate broader application of the proposed similitude law.
Data availability
Data available on request from the corresponding author.
References
Knappett, J. A., Reid, C., Kinmond, S. & O’Reilly, K. Small-Scale modeling of reinforced concrete structural elements for use in a geotechnical centrifuge. J. Struct. Eng. 137, 1263–1271 (2011).
Lee, J. H., Park, Y. M., Jung, C. Y. & Kim, J. B. Experimental and measurement methods for the Small-Scale model testing of lateral and torsional stability. Int. J. Concr Struct. Mater. 11, 377–389 (2017).
Kim, W., El-Attar, A. & White, R. N. Small-Scale modeling techniques for reinforced concrete structures subjected to seismic loads. (1988). Nceer-88-0041.
Kim, N. S., Lee, J. H. & Chang, S. P. Equivalent multi-phase similitude law for pseudodynamic test on small scale reinforced concrete models. Eng. Struct. 31, 834–846 (2009).
Del Giudice, L., Wróbel, R., Katsamakas, A. A., Leinenbach, C. & Vassiliou, M. F. Physical modelling of reinforced concrete at a 1:40 scale using additively manufactured reinforcement cages. Earthq. Eng. Struct. Dyn. 51, 537–551 (2022).
Yang, X., Lu, W., Ren, X. & Xue, B. Scaling method for small sized model testing of steel-reinforced concrete structures. Earthq. Eng. Resil. 2, 418–435 (2023).
Laefer, D. F. & Erkal, A. Selection, production, and testing of scaled reinforced concrete models and their components. Constr. Build. Mater. 126, 398–409 (2016).
Akiyama, H. et al. 1/10th scale model test of inner concrete structure composed of concrete filled steel bearing wall. In Proceedings of the 10th SMiRT Conference 73–78 (1989).
Caccese, V. & Harris, H. G. Earthquake simulation testing of small-scale reinforced concrete structures. ACI Struct. J. 87, 72–80 (1990).
Cong, P. Similarity law of global and local responses of reinforced concrete beams subjected to impact loading. Int J. Impact Eng 194, (2024).
Fuss, D. Mix Design for Small-Scale Models of Concrete Structures (Navel Civil Engineering Laboratory, 1968).
Harris, H. G. & Sabnis, G. M. Structural Modeling and Experimental Techniques (CRC, 1999).
Buckingham, E. On physically similar systems; Illustrations of the use of dimensional equations. Phys. Rev. 4, 345–376 (1914).
Sato, J. A., Vecchio, F. J. & Andre, H. M. Scale-model teseting of reinforced concrete under impact loading conditions. Can. J. Civ. Eng. 16, 459–465 (1989).
Krawinkler, H. & Moncarz, P. D. Similitude Requirements for Dynamic Models 1–22 (Publication SP - American Concrete Institute, 1982).
Meng, Q. L. The Dynamic Simulation of Nonlinear Performance of R/C Structures in the Earthquake Simulation Shaking Table Test (Institute of Engineering Mechanics, China Seismological Bureau, 2001).
Cho, N. S. Similitude Law on Material Non-linearity for Seismic Performance of Concrete Piers (Seoul National University, 2008).
Lee, D. K. & Cho, J. Y. Similitude law on material Non-linearity for seismic performance evaluation of RC columns. J. Korea Concrete Inst. 22, 409–417 (2010).
Meng, Q. L. & Zhang, M. Z. Nonlinear performance simulation of RC structures with small-scaled model in earthquake simulation test. Adv. Mat. Res. 243–249, 3717–3729 (2011).
Mazzoni, S., McKenna, F., Scott, M. H. & Fenves, G. L. Open system for earthquake engineering simulation (OpenSEES) user Command-Language manual. Pac. Earthq. Eng. Res. Cent. 465 (2006).
Newmark, N. M. A method of computation for structural dynamics. J. Eng. Mech 85 (1972).
Park, J. Similitude law considering the variation of strain ratio for dynamic test using scaled model with composite material (Doctoral Dissertation). Seoul National University (2017).
Acknowledgements
This research was supported by a grant (15CTAP-C077408-02) from Construction & Transportation Technology Advancement Research Program funded by Ministry of Land, Transport and Maritime Affairs of Korean government. This work was also supported by Institute of Construction and Environmental Engineering at Seoul National University. The authors wish to express their gratitude for the support.
Author information
Authors and Affiliations
Contributions
Conceptualization & Methodology: J.P., Y.C.; Analysis: J.P., Y.C.; Writing—original draft: J.P; Writing—review and editing: Y.C., J.C., S.L.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Park, J., Lee, SC., Chae, Y. et al. A new similitude law for testing scaled RC structures. Sci Rep 15, 22037 (2025). https://doi.org/10.1038/s41598-025-05038-5
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-05038-5
