
Abstract
This study introduces human-swarm interaction (HSI) strategies to enhance bio-inspired swarm intelligence (SI) algorithms, addressing inherent limitations of the traditional monkey algorithm (MA) such as premature convergence and computational inefficiency in complex search spaces. We propose three HSI integration strategies involving intermittent, persistent, and parameter-setting interactions within the HSI to augment emergent behaviors and refine the MA’s intrinsic optimization mechanisms. Validation through seven benchmark functions (one unimodal and six multimodal) across seven dimensions demonstrates the HSI-MA’s ability to resolve complex, multidimensional optimization problems with statistically significant (p < 0.05) superior accuracy and stability compared to the original MA and four baseline SI algorithms, achieving 85% dominance in test cases while reducing iterations by an order of magnitude. Further evaluation on five engineering design problems reveals the HSI-MA outperforms 36 state-of-the-art optimizers in 70% of scenarios, confirming its enhanced precision and efficiency in practical applications. In contrast to conventional fusion-based approaches, the HSI framework preserves the original algorithm’s theoretical foundations while systematically integrating human intelligence to enhance structural adaptability and operational efficiency.
Similar content being viewed by others

Introduction
Bio-inspired swarm intelligence and human-swarm interaction strategies
Bio-inspired swarm intelligence (SI) algorithms address complex problems by emulating the flexible, robust and decentralized behaviors of social organisms in nature1,2,3,4,5,6. These algorithms draw inspiration from diverse biological species, including microorganisms, birds, amphibians, and other wildlife7. Recent advances focus on improving SI performance through targeted modifications of individual and interactive swarm behaviors, incorporating natural dynamics such as cooperation, competition, mutualism, and predation8,9. For example, the Sailfish Optimizer (SFO) models predator–prey interactions between sailfish and sardines to enhance solution exploration, exploitation, and convergence speed10. In parallel, artificial intelligence (AI) techniques such as reinforcement learning (RL) have been integrated into SI frameworks (e.g., RL-augmented particle swarm optimization), enabling adaptive learning and higher-level control of swarm individuals11.
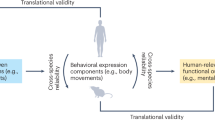
Human-swarm interaction (HSI), widely studied in swarm robotics, offers an additional pathway to enhance SI algorithms12,13. HSI integrates human input into swarm-based optimization processes, thereby improving algorithmic adaptability and convergence behavior. Kolling et al.14 categorized human interaction into four types: (1) intermittent interaction, where selected individuals undergo behavior shifts; (2) environmental interaction, involving passive behavior change due to manipulated local conditions; (3) persistent interaction, where operators continuously guide behaviors; and (4) parameter setting interaction, involving human adjustment of free parameters to steer emergent behaviors. These interaction types collectively inform the evolution and refinement of SI algorithms. For example, intermittent and persistent interactions mimic genetic mutation and behavioral specialization, while environmental interaction parallels natural selection by shaping local swarm dynamics. Parameter tuning reflects human-guided adaptation, and interactive machine learning (IML) frameworks enable real-time human feedback to improve swarm robustness, adaptability, and interpretability6,14,15,16.
Monkey algorithm and existing improvements
The monkey algorithm (MA) is a bio-inspired SI algorithm modeled on the mountain-climbing behavior of monkeys17. It simulates three core actions—climb, watch-jump, and somersault – to iteratively explore and refine solutions in complex, multivariate optimization problems17. As illustrated in Fig. 1, individuals follow a sequence of climb, watch-jump, climb, and somersault, through which candidate solutions are searched, evaluated, and updated. Similar to other SI algorithms, MA has undergone continuous enhancements for broader applicability18. Table 1 summarizes typical modifications and their strategies, many of which align with HSI categories introduced earlier.
-
Intermittent interaction is evident in hybrid approaches that fuse MA with other algorithms, such as genetic algorithms (GA), immune algorithms (IA), particle swarm optimization (PSO), artificial bee colony (ABC), and krill herd algorithm (KHA)19,20,21,22,23. These integrations introduce novel behaviors and enhance search dynamics.
-
Environmental interaction appears in the information-sharing mechanisms with globally optimal individuals during the climb and somersault phases, aimed at improving individual update efficiency20,24,25.
-
Fine-tuning of behavioral parameters such as position, distance, and movement often involves replacing constants with dynamic variables to promote adaptability24,26,27,28.
-
Some variants adopt population partitioning, which improves both individual interaction efficiency19,29 and behavior utilization24.

Procedures of the MA (Revised from17).
These strategies collectively increase the algorithm’s adaptability, convergence speed, and solution diversity across a wide range of applications.
Motivation and objectives
This study addresses a key limitation in conventional enhancements to swarm intelligence (SI) algorithms, which largely rely on algorithmic fusion for incremental performance gains. Such approaches often overlook the systematic integration of human expertise as a foundational design element. In contrast, this work embeds human intelligence (HI) directly into the behavioral framework of the swarm through human-defined constraints, adaptive operators, and behavior reconfiguration strategies34. Unlike algorithm fusion, which combines predefined SI components, the proposed human-swarm interaction (HSI) enhancements maintain the theoretical integrity of the original algorithm while enabling the dynamic incorporation of human cognitive heuristics. Importantly, this integration does not rely on real-time user input or external interfaces—such as application programming interfaces (APIs), graphical user interfaces (GUIs), or dynamic feedback loops—commonly found in HSI systems6, thereby reducing deployment complexity and operational cost.
The second objective is to systematically analyze behavioral and interactional limitations of the original Monkey Algorithm (MA) and implement targeted HSI-based modifications. Going beyond generic techniques like inertial weight tuning (Section"Monkey algorithm and existing improvements"), the proposed framework tackles high-complexity issues such as exploration–exploitation balance through methodologically diverse interventions.
The remainder of this paper is organized as follows. Section"The proposed improved monkey algorithm"analyzes the shortcomings of the original MA and introduces three HSI-based improvements. Sections"Evaluation of the proposed algorithm with benchmark functions"–"Application of the proposed algorithm in engineering problems"evaluate the enhanced MA using seven benchmark functions and five practical engineering problems, showing superior accuracy, stability, and efficiency relative to the original MA, four baseline SI algorithms, and 36 state-of-the-art methods. Section"Conclusions and outlook"concludes with key findings and directions for future research.
The proposed improved monkey algorithm
The original monkey algorithm (MA) often suffers from premature convergence and inefficient exploration capabilities in high-dimensional search spaces. To overcome these limitations, we propose an improved MA that integrates HSI-inspired strategies to enhance both global search diversity and local refinement accuracy. This study implements three principal strategies to enhance the performance of the original MA, drawing from the reviewed human intelligences (HIs) and previous improvements to MA discussed earlier. The first strategy involves replacing the fixed step length with an adaptive one in the climb process. Prior research has explored adaptive step lengths, correlating them with the climb number24 or performance over two consecutive time steps28, typically resulting in shorter steps as the solutions approach convergence. In contrast, we propose an improved MA that evaluates individual positions over the five most recent time steps, employing both the maximum and average values to update the next step length. The proposed adaptive step length not only broadens the assessment scope for solution convergence but also incorporates a novel indicator—the individual position—avoids the assumption that step length must decrease monotonically. This feature is particularly beneficial in cases where newly discovered regions warrant exploratory flexibility during the climb phase.

Algorithm 1. Updated climb process in HSI-MA.
The second strategy involves population partitioning and behavioral shift. As indicated by the stop criterion in Fig. 1, variations in both individual position and performance typically manifest at the end of the climb process. Previously, the swarm either adapted to follow a single behavior21 or was partitioned to exhibit different behaviors24 during the subsequent watch-jump process. Both strategies relied heavily on individual performance. In the proposed MA, individuals maintaining their positions or performance levels at the final stage of the climb process are assigned to the watch process. Conversely, those exhibiting potential for further exploration in their current regions are assigned to commence the second climb process. Additionally, the area designated for the watch process is expanded to encompass the entire feasible domain in the proposed MA, thereby enhancing the scope of observation. This strategy introduces a greater level of HI by considering each individual’s adaptability to various behaviors and promoting specialized behaviors accordingly. The SI is thus significantly improved through the organization and optimization of individual behaviors. This strategy is further leveraged to initiate the somersault process in the proposed MA, aimed at enhancing the overall search efficacy of the swarm.

Algorithm 2. Updated watch-jump process in HSI-MA.
The third strategy incorporates the concept of intermittent interaction, assigning new behaviors to selected subsets of the swarm to elicit novel emergent behavior. Following the somersault process, this strategy involves calculating a matrix representing the Euclidean distances between pairs of individuals, which helps assess the degree of swarm aggregation. In instances of high aggregation, the position of a randomly selected individual is shifted to a random position within the solution domain, emulating the “scout” mechanism from the artificial bee colony (ABC) algorithm35. While this strategy borrows behaviors from an established algorithm, it embodies HI by overcoming the original algorithm’s constraints and choosing the most suitable behavior for the situation. Importantly, the integration of the “scouting” behavior among monkey individuals adheres to biological principles, ensuring the efficiency and interpretability of the modified algorithm.

Algorithm 3. Search process in HSI-MA.
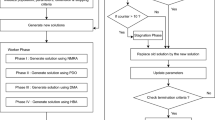
Figure 2 illustrates the comparison between the original and proposed algorithms. The applied modification strategies center on refining the inherent behaviors of the original swarm, maintaining the foundational principles of swarm intelligence (SI) while enhancing its structure, adaptability, and efficiency through the incorporation of HI. This synergistic interaction between SI and HI allows the modified MA to develop more sophisticated and context-specific behaviors, thus equipping it to effectively tackle complex problem environments.

Flow of the proposed monkey algorithm.
Evaluation of the proposed algorithm with benchmark functions
As listed in Table 2, this study employs six multimodal functions and one unimodal function as the benchmark functions to evaluate the performance of the proposed algorithm36,37. Simulating real optimization challenges, these functions demonstrate the proposed MA’s capabilities in both identifying optimal solutions and managing multiple feasible solutions. Additionally, we define each benchmark function across seven dimensions (2, 4, 6, 8, 10, 15 and 20) to assess the proposed algorithm’s performance in real-world scenarios with escalating complexity and interactions.
In addition to the original MA, we employed four fundamental algorithms—particle swarm optimization (PSO), genetic algorithm (GA), firefly algorithm (FA)38, and sine cosine algorithm (SCA)39 to verify the performance of the proposed algorithm. The selected algorithms encompass fundamental search mechanisms and operational paradigms. Their performance has been rigorously validated against benchmark datasets and remains extensively referenced as evaluation criteria for assessing the efficacy of novel algorithmic approaches40. For a consistent comparison, as in Table 3 for all benchmark problems in this section, and the population size of to.
This study methodically quantifies algorithmic performance through accuracy (best/averaged values), stability (standard deviation), and search efficiency metrics, tracking objective function dynamics across iterations. Analysis of 1000-iteration outcomes from 100 independent runs generated a 29,400-case dataset (6 algorithms × 7 functions × 7 dimensions × 100 runs), enabling systematic evaluation of optimization robustness and precision. Figures 3-9 display the violin plots, which illustrate the distribution of the function value across repetitive runs after 1,000 iterations41. For each combination of function type and dimension, the superior performance of the proposed HSI-MA over other algorithms is highlighted by lower median values of the function value and more compact violin plot distributions. This superiority is consistent across all function dimensions and has been proved statistically significant by the p-values from the Wilcoxon rank-sum test39,42 detailed in Table 4. Furthermore, we calculated the best, average, and standard deviation of the function value across repetitive runs, as detailed in Table 5-7. Cases that exhibit higher accuracy and stability (i.e., lowest average and standard deviation of the function value) are emphasized in bold within these tables, with the majority attributed to the enhanced performance of the proposed HSI-MA.

Violin plot of Ackley function results with different dimensions: (a) D = 2; (b) D = 4; (c) D = 6; (d) D = 8; (e) D = 10; (f) D = 15; (g) D = 20.

Violin plot of Rastrigin function results with different dimensions: (a) D = 2; (b) D = 4; (c) D = 6; (d) D = 8; (e) D = 10; (f) D = 15; (g) D = 20.

Violin plot of Drop-wave function results with different dimensions: (a) D = 2; (b) D = 4; (c) D = 6; (d) D = 8; (e) D = 10; (f) D = 15; (g) D = 20.

Violin plot of Griewank function results with different dimensions: (a) D = 2; (b) D = 4; (c) D = 6; (d) D = 8; (e) D = 10; (f) D = 15; (g) D = 20.

Violin plot of Levy function results with different dimensions: (a) D = 2; (b) D = 4; (c) D = 6; (d) D = 8; (e) D = 10; (f) D = 15; (g) D = 20.

Violin plot of Weierstrass function results with different dimensions: (a) D = 2; (b) D = 4; (c) D = 6; (d) D = 8; (e) D = 10; (f) D = 15; (g) D = 20.

Violin plot of Sphere function results with different dimensions: (a) D = 2; (b) D = 4; (c) D = 6; (d) D = 8; (e) D = 10; (f) D = 15; (g) D = 20.
We evaluated the search efficiency of the applied algorithms using the sphere function, which lacks local optima, thus allowing for a straightforward assessment of the algorithm’s ability to converge to the global optimum. Figure 10 illustrates the variation in the function value across 1,000 iterations. Consistent with other performance metrics, the proposed HSI-MA demonstrated superior search efficiency over other algorithms across all function dimensions. This superiority is highlighted by a rapid decrease in the function value during the initial (less than 10) iterations, followed by significantly shorter plateau periods. These findings substantiate the effectiveness of the applied modification strategies in enhancing the organization and optimization of the swarm behaviors.

Search efficiency of applied algorithms for different function dimensions: (a) D = 2; (b) D = 4; (c) D = 6; (d) D = 8; (e) D = 10; (f) D = 15; (g) D = 20.
Application of the proposed algorithm in engineering problems
This study further evaluates the performance of the proposed algorithm using five representative engineering problems, as detailed in Table 810,43,44,45,46,47,48,49,50. In addition to a physical illustration of the problem, Table 8 outlines the two components of the objective function—the optimization function to be minimized and the constraints applied as a penalty term50. Practical engineering problems involve more complex search domains and constraints, unlike benchmark functions. Moreover, to assess the effectiveness of the proposed algorithm, we conducted comparisons with 36 state-of-the-art algorithms that incorporate more advanced and innovative SI and HI techniques than the fundamental ones utilized in Section"Application of the proposed algorithm in engineering problems".
Table 9 presents the accuracy and stability of the proposed algorithm, evaluated through the best, worst, average, and standard deviation of the optimization function values across 30 repetitive runs. Among all algorithms, HSI-MA consistently exhibited superior performance, with most metrics ranking first (emphasized in bold in the table) when applied to these five engineering problems. The convergence speed of HSI-MA was also assessed and compared to an innovative bio-inspired algorithm—the Ivy algorithm (IVYA)50. As shown in Fig. 11, HSI-MA achieved higher accuracy, as indicated by the mean optimization function value, after more than 10,000 iterations. Additionally, similar to its performance on benchmark functions, HSI-MA experienced a rapid decrease in the optimization function value within the first 10 iterations, a faster rate than IVYA.

Search efficiency of IVYA and HSI-MA for (a) Three-bar truss problem; (b) Pressure vessel optimization problem; (c) Tension/compression spring design; (d) Piston lever optimal design; (e) Tubular column design.
Conclusions and outlook
This work demonstrates the feasibility of enhancing the monkey algorithm (MA) by incorporating human-swarm interaction (HSI) based strategies. By inducing novel emergent behaviors and refining the intrinsic behaviors of the original algorithm, we achieved significant improvements of the algorithm in terms of accuracy, stability, and search efficiency. The major findings are detailed as follows.
-
Inspired by the intermittent, persistent, and parameter-setting interactions within HSI, this study explored three corresponding strategies, including introducing new individual behavior, implementing behavior specialization, and refining original individual behaviors.
-
Across seven unimodal and multimodal benchmark functions of seven dimensions, the proposed HSI-MA demonstrated significant improvements in optimization accuracy and stability. Relative to the original MA and four fundamental swarm intelligence (SI) algorithms, HSI-MA achieved orders-of-magnitude improvements in the best, average, and standard deviation of function values after 1,000 iterations over 100 repetitive runs.
-
Illustrated in the sphere function value with iterations, HSI-MA achieved significant improvements in search efficiency, characterized by a rapid decrease in the function value during the initial 10 iterations and substantially shorter plateau periods.
-
In five practical engineering problems, HSI-MA exhibited superior performance in optimization accuracy and stability. Relative to 36 advanced and innovative algorithms, HSI-MA ranked first in most metrics, including the best, worst, average, and standard deviation of optimization function values across 30 repetitive runs. Specifically, HSI-MA achieved a faster optimization rate than an innovative bio-inspired algorithm within the first 10 iterations.
For future research, a comprehensive evaluation should consider the balance between efficiency, complexity, time, and cost. Additionally, future work may explore deeper interactions with HI, such as the incorporation of human-operated functions or interfaces, or adaptive human collaboration. This study has demonstrated better performance than the conventional algorithm fusion technique, through algorithm modification by integrating human intelligence (HI) to improve the structure, adaptability, and efficiency of the original MA.
Data availability
The data used to support the findings of this study are included within the article, and the code of HSI-MA applied in this study are provided on GitHub at https://github.com/pakanama/HSI-MA.
References
Deng, Y. et al. Determination of complex modulus gradients of flexible pavements using falling weight deflectometer and artificial intelligence. Mater. Struct. 53(4), 1–17 (2020).
Deng, Y., X. Shi. & Zhang, Y. Determination of composite modulus of concrete containing reclaimed asphalt pavement using micromechanical modelling and soft computing techniques. J. Clean. Prod. 129486 (2021).
Deng, Y. et al. Development of equivalent stationary dynamic loads for moving vehicular loads using artificial intelligence-based finite element model updating. Eng. Comput. 38(4), 2955–2974 (2022).
Deng, Y. & Shi, X. An accurate, reproducible and robust model to predict the rutting of asphalt pavement: Neural networks coupled with particle swarm optimization. IEEE Intell. Transp. Syst. Trans. 23(11), 22063–22072 (2022).
Deng, Y., Luo, X. & Wang, H. Backcalculation of damage density of in-service asphalt pavements using artificial intelligence-based finite element model updating. Fatigue Fract. Eng. Mater. Struct. 45(3), 671–686 (2022).
Rodriguez, S. & Hilaire, V. A methodological approach for the analysis and design of Human-Swarm interactions based upon feedback loops. Expert Syst. Appl. 217, 119482 (2023).
Zedadra, O. et al. Swarm intelligence-based algorithms within IoT-based systems: A review. J. Parallel Distrib. Comput. 122, 173–187 (2018).
Deng, Y., Zhang, Y. & Shi, X. Feasibility of determining asphalt pavement condition from falling weight deflectometer test and finite element model updating. Phil. Trans. R. Soc. A 381(2254), 20220168 (2023).
Wang, G. et al. Swarm intelligence research: From bio-inspired single-population swarm intelligence to human-machine hybrid swarm intelligence. Mach. Intell. Res. 20(1), 121–144 (2023).
Shadravan, S., Naji, H. R. & Bardsiri, V. K. The Sailfish Optimizer: A novel nature-inspired metaheuristic algorithm for solving constrained engineering optimization problems. Eng. Appl. Artif. Intell. 80, 20–34 (2019).
Lu, L. et al. Reinforcement learning-based particle swarm optimization for sewage treatment control. Complex. Intell. Syst. 7(5), 2199–2210 (2021).
Kolling, A. et al. Human interaction with robot swarms: A survey. IEEE Trans. Hum.-Mach. Syst. 46(1), 9–26 (2015).
Schranz, M. et al. Swarm robotic behaviors and current applications. Front. Robot. AI 7, 36 (2020).
Kolling, A. et al. Human swarm interaction: An experimental study of two types of interaction with foraging swarms. J. Human-Robot. Interact. 2(2) (2013).
Amershi, S. et al. Power to the people: The role of humans in interactive machine learning. AI. Mag. 35(4), 105–120 (2014).
Holzinger, A. et al. Interactive machine learning: experimental evidence for the human in the algorithmic loop: A case study on Ant Colony Optimization. Appl. Intell. 49, 2401–2414 (2019).
Zhao, R. & Tang, W. Monkey algorithm for global numerical optimization. J. Uncertain. Syst. 2(3), 165–176 (2008).
Devi, R. V. & Sathya, S. S. Monkey behavior based algorithms - a survey. Int. J. Intell. Syst. Appl. 9(12), 67 (2017).
Chen, X., Zhou, Y. & Luo, Q. A hybrid monkey search algorithm for clustering analysis. Sci. World J. 2014, 938239 (2014).
Jia, J., Feng, S. & Liu, W. A triaxial accelerometer monkey algorithm for optimal sensor placement in structural health monitoring. Meas. Sci. Technol. 26(6), 065104 (2015).
Yi, T. et al. Optimal sensor placement for health monitoring of high-rise structure using adaptive monkey algorithm. Struct. Control. Health Monit. 22(4), 667–681 (2015).
Yi, T., Li, H. & Zhang, X. Health monitoring sensor placement optimization for canton tower using immune monkey algorithm. Struct. Control. Health Monit. 22(1), 123–138 (2015).
Khalil, A. M., Fateen, S.-E.K. & Bonilla-Petriciolet, A. MAKHA-a new hybrid swarm intelligence global optimization algorithm. Algorithms 8(2), 336–365 (2015).
Cui, Y. Application of the improved chaotic self-adapting monkey algorithm into radar systems of internet of things. IEEE Access 6, 54270–54281 (2018).
Yi, T., Li, H. & Zhang, X. Sensor placement on canton tower for health monitoring using asynchronous-climb monkey algorithm. Smart Mater. Struct. 21(12), 125023 (2012).
Wang, J., et al. Discrete monkey algorithm and its application in transmission network expansion planning. In IEEE PES General Meeting. (Minneapolis, MN, USA: IEEE, 2010).
Yi, T., Li, H. & Zhang, X. A modified monkey algorithm for optimal sensor placement in structural health monitoring. Smart Mater. Struct. 21(10), 105033 (2012).
Zheng, L. An improved monkey algorithm with dynamic adaptation. Appl. Math. Comput. 222, 645–657 (2013).
Yi, T. et al. Sensor placement optimization in structural health monitoring using niching monkey algorithm. Int. J. Struct. Stab. Dyn. 14(05), 1440012 (2014).
Soleimanpour, M. & Nezamabadi-Pour, H. A modified monkey algorithm for real-parameter optimization. J. Multi.-Val. Logic Soft Comput. 21(5–6), 453–477 (2013).
Zhou, Y., Chen, X. & Zhou, G. An improved monkey algorithm for a 0–1 knapsack problem. Appl. Soft Comput. 38, 817–830 (2016).
Crawford, B. et al. A binary monkey search algorithm variation for solving the set covering problem. Nat. Comput. 19(4), 825–841 (2020).
Tunay, M. A new design of metaheuristic search called improved monkey algorithm based on random perturbation for optimization problems. Sci. Program. 2021, 1–14 (2021).
Rai, R. et al. Human-inspired optimization algorithms: Theoretical foundations, algorithms, open-research issues and application for multi-level thresholding. Arch. Comput. Method. Eng. 29(7), 5313–5352 (2022).
Karaboga, D. & Akay, B. A comparative study of artificial bee colony algorithm. Appl. Math. Comput. 214(1), 108–132 (2009).
Plevris, V. & Solorzano, G. A collection of 30 multidimensional functions for global optimization benchmarking. Data 7(4), 46 (2022).
Surjanovic, S. & Bingham. D. Virtual library of simulation experiments: test functions and datasets. [cited 2024 April 28]; Available from: https://www.sfu.ca/~ssurjano/levy.html (2013).
Yang, X.-S. Firefly algorithms for multimodal optimization In 5th International Symposium on Stochastic Algorithms, Foundations and Applications. 169–178 (Springer, Berlin, Heidelberg: Sapporo, Japan. 2009).
Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl.-Based Syst. 96, 120–133 (2016).
Chakraborty, A. & Kar, A. K. Swarm intelligence: A review of algorithms P. In Nature-Inspired Computing Optimization (eds Srikanta et al.) 475–494 (Springer Cham, 2017).
Hintze, J. L. & Nelson, R. D. Violin plots: A box plot-density trace synergism. Am. Stat. 52(2), 181–184 (1998).
Mann, H. B. & Whitney, D. R. On a test of whether one of two random variables is stochastically larger than the other. Ann. Math. Stat. 18(1), 50–60 (1947).
dos Santos Coelho, L. Gaussian quantum-behaved particle swarm optimization approaches for constrained engineering design problems. Expert Syst. Appl. 37(2), 1676–1683 (2009).
Chun, S., Kim, Y.-T. & Kim, T.-H. A diversity-enhanced constrained particle swarm optimizer for mixed integer-discrete-continuous engineering design problems. Adv. Mech. Eng. 5, 130750 (2013).
Shahrouzi, M. & Kaveh, A. An efficient derivative-free optimization algorithm inspired by avian life-saving manoeuvres. J. Comput. Sci. 57, 101483 (2022).
Houssein, E. H. et al. Hybrid slime mould algorithm with adaptive guided differential evolution algorithm for combinatorial and global optimization problems. Expert Syst. Appl. 174, 114689 (2021).
Huang, F.-Z., Wang, L. & He, Q. An effective co-evolutionary differential evolution for constrained optimization. Appl. Math. Comput. 186(1), 340–356 (2007).
Kim, P. & Lee, J. An integrated method of particle swarm optimization and differential evolution. J. Mech. Sci. Technol. 23, 426–434 (2009).
Prayogo, D. et al. Differential big bang-big crunch algorithm for construction-engineering design optimization. Autom. Constr. 85, 290–304 (2018).
Ghasemi, M. et al. Optimization based on the smart behavior of plants with its engineering applications: Ivy algorithm. Knowl.-Based Syst. 295, 111850 (2024).
Wu, J. et al. An improved firefly algorithm for global continuous optimization problems. Expert Syst. Appl. 149, 113340 (2020).
Ray, T. & Liew, K.-M. Society and civilization: An optimization algorithm based on the simulation of social behavior. IEEE Trans. Evol. Comput. 7(4), 386–396 (2003).
Shubham, G. & Kusum, D. A memory-based grey wolf optimizer for global optimization tasks. Appl. Soft Comput. 93, 106367 (2020).
Nematollahi, A. F., Rahiminejad, A. & Vahidi, B. A novel physical based meta-heuristic optimization method known as lightning attachment procedure optimization. Appl. Soft Comput. 59, 596–621 (2017).
Kizilay, D., et al. A differential evolution algorithm with Q-learning for solving engineering design problems. In 2020 IEEE Congress on Evolutionary Computation (CEC). (Glasgow, United Kingdom: IEEE, 2020).
Wen, X., et al. Voting-mechanism based ensemble constraint handling technique for real-world single-objective constrained optimization. In 2020 IEEE Congress on Evolutionary Computation (CEC). (IEEE: Glasgow, United Kingdom, 2020).
Coello, C. A. C. & Cortes, N. C. Hybridizing a genetic algorithm with an artificial immune system for global optimization. Eng. Optim. 36(5), 607–634 (2004).
G, B., et al. Deer hunting optimization algorithm: a new nature-inspired meta-heuristic paradigm. Comput. J. bxy133 (2019).
Faramarzi, A. et al. Equilibrium optimizer: A novel optimization algorithm. Knowl.-Based Syst. 191, 105190 (2020).
He, Q. & Wang, L. An effective co-evolutionary particle swarm optimization for constrained engineering design problems. Eng. Appl. Artif. Intell. 20(1), 89–99 (2007).
Połap, D. & Woźniak, M. Red fox optimization algorithm. Expert Syst. Appl. 166, 114107 (2021).
Bernardino, H.S., et al. A new hybrid AIS-GA for constrained optimization problems in mechanical engineering. In 2008 IEEE Congress on Evolutionary Computation (IEEE World Congress on Computational Intelligence). (Hong Kong, China: IEEE, 2008).
Parsopoulos, K.E. & Vrahatis. M.N. Unified particle swarm optimization for solving constrained engineering optimization problems. In Advances in Natural Computation. (Berlin, Heidelberg: Springer Berlin Heidelberg, 2005).
He, S.-X. & Cui, Y.-T. Multiscale medalist learning algorithm and its application in engineering. Acta Mech. 235(2), 751–777 (2024).
Ghafil, H. N. & Jármai, K. Dynamic differential annealed optimization: New metaheuristic optimization algorithm for engineering applications. Appl. Soft Comput. 93, 106392 (2020).
Braik, M. S. Chameleon Swarm Algorithm: A bio-inspired optimizer for solving engineering design problems. Expert Syst. Appl. 174, 114685 (2021).
Song, S. et al. Dimension decided harris hawks optimization with gaussian mutation: Balance analysis and diversity patterns. Knowl.-Based Syst. 215, 106425 (2021).
Yapici, H. & Cetinkaya, N. A new meta-heuristic optimizer: Pathfinder algorithm. Appl. Soft Comput. 78, 545–568 (2019).
Bernardino, H.S., H.J.C. Barbosa, & Lemonge, A.C.C. A hybrid genetic algorithm for constrained optimization problems in mechanical engineering. In 2007 IEEE Congress on Evolutionary Computation. (Singapore: IEEE, 2007).
Naruei, I. & Keynia, F. A new optimization method based on COOT bird natural life model. Expert Syst. Appl. 183, 115352 (2021).
Mezura-Montes, E. & Coello, C.A.C. Useful infeasible solutions in engineering optimization with evolutionary algorithms. In MICAI 2005: Advances in Artificial Intelligence. (Berlin, Heidelberg: Springer Berlin Heidelberg. 2005).
Ahmadianfar, I. et al. INFO: An efficient optimization algorithm based on weighted mean of vectors. Expert Syst. Appl. 195, 116516 (2022).
Gandomi, A.H. and D.A. Roke. Engineering optimization using interior search algorithm. In 2014 IEEE Symposium on Swarm Intelligence. (Florida, USA: IEEE, 2014)
Acknowledgements
Yong Deng and Xianming Shi acknowledge the high-performance computing (HPC) cluster—Kamiak at Washington State University for running the cases in this study.
Funding
No funding was provided for this work as this is a purely intellectual exploration.
Author information
Authors and Affiliations
Contributions
Yong Deng: Conceptualization, Investigation, Methodology, Software, Data curation, Formal analysis, Validation, Visualization, Writing – original draft. Yazhou Zhang: Conceptualization, Investigation, Methodology, Software, Data curation, Formal analysis, Visualization, Validation, Writing – original draft. Xianming Shi: Investigation, Resources, Supervision, Writing – review & editing.
Corresponding authors
Ethics declarations
Competing interests
The authors declare that they have no conflict of interest.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Deng, Y., Zhang, Y. & Shi, X. Refining swarm behaviors with human-swarm interaction strategies: An improved monkey algorithm for multidimensional optimization problems. Sci Rep 15, 31197 (2025). https://doi.org/10.1038/s41598-025-12816-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-12816-8
