
Abstract
The integration of distributed generation (DG) into modern electric grids has garnered considerable interest due to its potential to enhance energy resiliency, reduce carbon emissions, and improve security. However, a critical challenge arises in the form of unintentional islanding. Islanding refers to a situation when DG systems, disconnected from the main network, continue supplying nearby loads. Such events pose risks to grid stability by resulting in deviations in voltage and frequency levels, equipment damage, and network safety. To address these challenges, this study introduces a novel approach for detecting islanding events in grid-tied DG systems using Wigner distribution functions and alienation index. First, a modal voltage signal is extracted from three-phase voltage measurements. Next, delta filters capture superimposed components of modal voltage. An islanding detection index (IDI) is then developed by utilising the Wigner distribution and alienation coefficient to effectively characterize islanding signatures. Finally, the IDI is evaluated against a predetermined threshold to differentiate islanding events from non-islanding conditions. Simulations are performed in MATLAB/SIMULINK on a standard IEC microgrid to validate the effectiveness of the proposed method. The results show superior performance over traditional techniques in speed, accuracy, and non-detection zones.
Similar content being viewed by others
Introduction
The integration of DGs into modern electricity distribution networks aims to reduce dependence on fossil fuels and decrease greenhouse gas emissions. Significant advances in efficiency, sustainability, and system resilience have emerged from DG integration1,2. Grid-connected DG systems allow small-scale power sources to operate in parallel with the main electric grid, providing substantial benefits concerning operational flexibility, lowered emissions, energy autonomy, and enhanced reliability and security. Unlike traditional large-scale power plants, DGs consist of smaller renewable sources close to customer demand such as solar panels, wind turbines and battery storage that can function in connection with the grid or independently3,4. When connected to the grid, DGs support the primary network while disconnected operation powers local needs. However, this shift from centralized to decentralised production changes electricity flows from one-way to two-way within distribution systems and introduces new technical challenges to the power system. One of the critical issues is unintentional islanding5. Islanding is a condition where a segment of the network remains energized despite disconnection from the main grid. Islanding events can arise due to equipment faults, equipment breakdowns, or disconnections for fault clearance by protective devices6,7,8. These events pose risks to grid stability by resulting in deviations in voltage and frequency levels, equipment damage, and network safety. Therefore, there is an urgent need to address this islanding problem in grid-tied DG systems through innovative detection, prevention, and mitigation strategies for removing islanded DG within 0.1 s for significant disturbances or 2 s for minor events. This helps ensure stability and avoids potential equipment damage amid momentary power loss.
There are several islanding detection methods (IDMs) that have been developed by researchers to detect islanding within power distribution networks2,9,10. These IDMs are generally divided into two categories either remote or local IDMs. Remote IDMs, which rely on communication networks and advanced signal processing techniques, to identify islanding phenomena and respond accordingly11. Wide-area phasor measurement systems12, transfer-trip schemes11, power line carrier communication13, adaptive protection scheme for islanded microgrid configuration14, and SCADA-based approaches are the examples of remote IDMs. Although remote IDMs have very low NDZ, their effectiveness is compromised due to communication failure. Local IDMs generally monitor voltage and current at the Point of Common Coupling (PCC) to assess the system’s response during islanding events2. Although local IDMs require no communication between DG systems and the utility grid, they do not support quick islanding identification. Local IDMs are typically cost-effective and straightforward to implement. They are generally classified into three main types: active, passive, and hybrid IDMs9,15,16. Active IDMs operate by intentionally injecting small disturbances into the network at intervals and by examining the system’s reaction at the PCC. During islanding events, the deviations in the voltage and current waveform are significant. Although active IDMs offer precise detection, they can sometimes impact power quality and stability17. The authors in18 introduced minor disturbances into the system to assess impedance changes. Although this method is fast in detection, it requires precise impedance measurements and synchronized inverters, which limits its use in multi-inverter systems. In another study19, Slip Mode Frequency Shift was presented, which monitored frequency changes and modified the voltage phase at the PCC using positive feedback. Phase and frequency shifts beyond the SMS curve indicated potential islanding. Active Frequency Drift20 adjusted the PCC frequency by manipulating the output current of the inverter and created feedback that detected islanding through frequency deviations. Some other active IDMs include Sandia Frequency Drift21, Negative Sequence Current Injection22, and Impedance-based IDM23.
Passive IDMs are widely studied and applied due to their simplicity, cost-effectiveness, and minimal impact on power quality5,24. These methods monitor key electrical parameters at the Point of Common Coupling (PCC), such as voltage, frequency, and power, to identify disturbances that signal the occurrence of islanding25. Unlike active IDMs, passive approaches do not introduce artificial disturbance signals into the network, which makes them less intrusive26,27. However, they are often limited due to their larger NDZ, especially under closely matched load and generation conditions. Some of the passive islanding detection methods are rate of change of frequency28, rate of change of power3, over/under voltage29 and under/over frequency detection30, and harmonic distortion analysis7. In recent years, signal processing techniques have been increasingly utilized to enhance the performance and reduce the NDZ of passive IDMs31,32. These methods use voltage and current signals to extract vital features to detect islanding events. These extracted features are then compared with a predefined threshold for detection. However, an ideal threshold can be very hard to pick. To address this issue, computational intelligence methods are often combined with signal processing techniques, improving detection accuracy and reducing the NDZ9,25,27,33. Various signal processing methods, including wavelet transform, S-transform, Hilbert-Huang transform, and Fourier transform, have been applied to islanding detection. Additionally, computational intelligence techniques such as artificial neural networks6, fuzzy logic34, support vector machines35, long short-term memory networks26, convolutional neural networks27, and deep learning methods have also been employed to enhance islanding detection.
Hybrid IDMs combine both active and passive techniques, and offer a balance between accurate detection and reduced impact on power quality29. These methods are particularly beneficial for complex power systems, where passive detection serves as the primary method and active detection is used as a backup. Unlike purely active methods that constantly inject signals, hybrid IDMs reduce the NDZ without frequent disturbances, thus minimising disruptions in power flow. Some of the hybrid IDMs are voltage unbalance and frequency set points36, rate of change of reactive power37 and voltage and reactive power shift method38. Hybrid methods combine the advantages of both active and passive elements to improve the accuracy, reliability, and adaptability of IDMs.
This study presents a new IDS based on the Wigner distribution function and alienation index to detect unintentional islanding events in grid-connected DG systems. Firstly, a modal voltage signal from the three-phase voltage measurements is obtained. Delta filters are then applied to extract the superimposed component from the modal voltage signal. Afterwards, an IDI is derived from the superimposed modal voltage using the Wigner distribution function and alienation index to accurately represent islanding characteristics within the grid. Finally, the IDI is assessed against a predefined threshold to identify islanding events within the grid-connected DG systems. The effectiveness of the proposed approach is validated through rigorous simulations conducted within a MATLAB/Simulink environment based on an industry-standard IEC microgrid testbed. Results demonstrate the reliability and precision of the IDM for detecting islanding events rapidly and accurately. Furthermore, a thorough comparative evaluation with traditional islanding detection techniques revealed that the proposed methodology offers markedly superior performance, especially with respect to detection speed, precision, and narrowing the NDZ.
The present article is organized in the following manner: The Section "Background theory" presents the conceptual and mathematical foundations of the principles employed in the proposed solution. The Section " Proposed WDF-based islanding detection" provides an in-depth description of the novel IDM. The Section "Test system" discusses the test system leveraged to confirm the efficacy of the suggested method. The Section "Simulation results and discussions" shares the simulation outcomes in detail. The Section "Conclusion" summarises the key finding.
Background theory
Wigner distribution function
In 1932 the Eugene Wigner introduced the Wigner Distribution Function (WDF), which is a pivotal time-frequency analysis technique for mapping out both temporal and spectral properties simultaneously39. The original WDF formulation excels at pinpointing frequency shifts over time. However, it tends to interfere due to cross-term and reduce time-frequency resolution. Researchers have attempted to refine the WDF by eliminating or reducing cross-terms to better serve practical analysis across diverse signal types. One of the main strengths of WDF is that it precisely tracks fluctuations within a signal frequency across its temporal evolution39,40,41. The improvements render the function more effective and interpretable while maintaining its capacity for jointly resolving both temporal and spectral intricacies. By refining interferences, these adaptations broaden the applicability of WDF to real-world use. The following mathematical expression is used to implement the WDF.
Where t depicts the shifting timeline variable, signifying the exact instant at which the assessment is being executed, ω symbolizes the angular frequency of the signal, quantifying how promptly the indication fluctuates across time. τ depicts the sign function in the time sphere, regularly alluded to as the time move or deferment. The variable x exhibits the input signal or sequence. The Wigner distribution function possesses many advantageous properties that render it applicable in both signal processing and quantum mechanics. Its simultaneous representation of time and frequency allows for a more nuanced characterization of a signal than conventional time or frequency domain analyses alone.
Alienation index
The alienation coefficient is a statistical metric that specify the proportion of the inconsistency of a reliant variable which cannot be described by an independent variable. According to41, the alienation index (AI) can be measured as:
Where r is the correlation coefficient and AI represents the alienation index. In this study, Pearson’s r correlation coefficient is used. The formula for Pearson’s r is as follows41:
Where n is the sample size and x and y are the variable set sums. The correlation coefficient shows the variation of one variable compared to another and the strength of their association. The correlation coefficient, which ranges from − 1 to + 1, indicates how strongly two variables are associated. A correlation of + 1 indicates a perfect positive link, implying that as one variable rises, the other rises also. However, a correlation of −1 suggests a complete negative relationship, where one variable increases as the other lowers while still capturing the same phenomenon.
Superimposed components
When a short-circuit fault or any other abnormal conditions occur within a power system, key variables like current, voltage, and power often deviate noticeably from their usual values. These deviations can be described by superimposed component, which specifically reflects the changes caused by the disturbance. The superimposed component only appears during abnormal events and operates independently from the normal operating values. Under any disturbance, electrical variables can be split into two parts: the normal operating component and the superimposed component. Thus, for a given variable y(t) during an abnormal event, we can represent it mathematically as the sum of these two distinct components42,43.
Where y(t) represents the variable during an abnormal condition, while ynor(t), and ysi(t) denote the normal and superimposed components, respectively. The superimposed component, ysi(t) can be defined as:
To calculate the superimposed component of a quantity, the pre-disturbance value of the quantity is subtracted from its post-disturbance value. As a result, when everything is running normally, the superimposed components are zero. They only become visible when any abnormal event hits the system. Superimposed components are usually computed by using delta filters. The simplest delta filter subtracts the integral delayed versions of the input signal from the input signal as follows.
Where T is the time period of the signal and n is an integer (in this case, n = 2).
Proposed WDF-based islanding detection
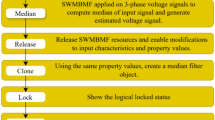
Islanding detection is crucial for maintaining the safety and stability of modern power systems. An islanding event occurs when a segment of the power grid remains operational and supplies electricity despite the shutdown or disturbance of the main grid. The isolated section can create risks for utility workers, potentially damage equipment, and threaten the overall reliability of the grid. The purpose of islanding detection is to quickly recognize and respond to these situations for reducing hazards and helping to restore power smoothly after an outage. This study introduces a new IDM designed for grid-connected DG systems. It employs Wigner distribution function on superimposed components of modal voltage to identify islanding events. The block diagram of the proposed IDM is shown in Fig. 1. The proposed IDM is composed of three primary units namely, Data Acquisition and Preprocessing Unit, Modal Signal Generation Unit, and Islanding Detection Unit. Each of the above unit serves a distinct purpose, and collaboratively work to identify islanding events within the grid-tied distribution network.

Block diagram of the proposed IDM.
All acquisition and signalprocessing operations, delta filtering, modal transformation, IDI calculation are executed inside the relay hardware located at the PCC. Because no information is exchanged with any other device/controller or relay, the detection latency is determined solely by the local sampling period (3840 Hz) and requires no communication channel, thus the proposed IDM is not affected by any communication delays or outages.
Data acquisition and preprocessing unit
The proposed IDM begins with a data acquisition and preprocessing. In this unit, firstly, three phase (3ɸ) voltage signals are recorded at the PCC using voltage transformers. These analog signals are then converted to discrete signals at 3840 Hz sampling rate. A second order Butterworth Filter with a cutoff frequency of 1800 Hz is used as an antialiasing filter before converting the signal to discrete time step. Afterwards, the discrete signal is used to obtain the superimposed components of three phase voltage. This is achieved by subtracting the three-phase voltage signal from its delayed version.
Modal signal generation unit
The modal signal generation unit transforms the 3ɸ voltage signal into a modal voltage signal. This transformation can be achieved by creating a specific linear combination of the 3ɸ voltages, represented by the formula7:
Here Vmdenotes the resulting modal voltage signal, whereas Va, Vb, and Vc are the individual three-phase voltage measurements. The coefficients α, β, and γ represent weights assigned to each phase. These coefficients are assigned values of 1, 2, and − 3, respectively, and are widely referenced in the literature7. This tactic of assigning separate weights to each voltage phase facilitates a novel conversion that combines the three inputs in a manner that prevents direct subtraction or addition of any pair. As a result, transient elements within every segment remain distinctly profiled, and any overlapping components cancel mutually. Such careful architecture is pivotal for accurately discriminating disturbances and transients, especially within modern power grids wherein signal qualities impact reliable islanding detection. Through modal signal transformation, multi-phase data decomposes into one representative signal. Hence, the computational burden is substantially reduced without the loss to the signal characteristics.
Islanding detection unit
This unit plays a central role in the proposed IDM and is tasked with distinguishing between islanding and non-islanding scenarios. It takes input from modal signal generation unit and gives trip signal at output for islanded DG to disconnect from main network. This involves employing the WDF on the superimposed modal voltage signal given by;
Where \(\:{\:V}_{m,si}\)and \(\:{V}_{m,si}^{*}\) represent the modal voltage signal in time domain and its complex conjugate, whereas w and τ represent frequency and time shift, respectively. The high time-frequency resolution and energy concentration of WDF enable simultaneous analysis of the superimposed modal voltage signal in time and frequency domains. After getting the WDF, the superimposed modal voltage signal’s energy concentration, or Wigner Distribution Index (WDI), is calculated using the formula below.
The WDI determines the superimposed modal voltage signal’s energy concentration in the time-frequency plane from signal fluctuations. The WDI can identify the islanding event with large deviations in microgrids perfectly even under severe islanding conditions. However, islanding events with smaller deviations remains challenging. To overcome this issue, the proposed IDM introduces a new Islanding Detection Index (IDI), which combines the WDI with the Alienation Index (AI). The IDI can be mathematically expressed as follows
Threshold selection
Under normal conditions, the superimposed components do not exist, and therefore the value of IDI is zero. Nevertheless, in practice, noise and load changes may cause a minor non-zero value. Therefore, a threshold is necessary to prevent nuisance tripping. Hence, this study also utilize a threshold to the IDI to avoid nuisance tripping. If the IDI is higher than this threshold, a potential islanding event is detected by the system. This method achieves a strong island detection capability with a very low probability of false tripping.
The threshold value was determined through a systematic evaluation involving a wide array of severe but non-islanding scenarios. These included abrupt load variations up to 100% at the point of common coupling, capacitor bank switching between 10 and 200 MVAR, and large motor startups of up to 600 hp. The robustness of the threshold was further validated under varying grid parameters, such as ± 25% changes in line impedance and DER capacities ranging from 10 to 100% of the local load. Additionally, white Gaussian noise with signal-to-noise ratios between 35 dB and 55 dB was introduced to emulate real-world measurement conditions. Extensive simulations are performed by using the above mentioned scenarios on the IEC microgrid test systems and it was found that a threshold value of 100 is suitable for this system.
Test system
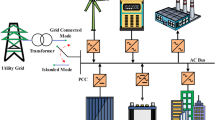
A detailed simulation study based on a widely used benchmark IEC 61,850 − 7420 microgrid system is presented in order to evaluate the performance of the developed IDM.

IEC microgrid test system.
The system, which operates on 25 kV, contains a mix of converter-based and synchronous-based DGs. Each of the DGs is connected to the grid through coupling transformers. Figure 2 illustrates a single-line representation of the test system. The load and network parameters of the microgrid are based on data from44. To perform islanding tests under different scenarios, the microgrid is segmented into four distinct zones, as illustrated in Fig. 2. To simulate an islanding event in a specific zone, the circuit breaker associated with the PCC of that zone is operated. This zonal setup enables a thorough examination of the performance of the suggested IDM to accurately identify islanding events under varying conditions, and provides a robust framework to test its reliability.
Simulation results and discussions
Performance under normal operating conditions
The efficacy of the proposed IDM under non-islanding conditions is critically assessed by carrying out extensive simulations. The simulations are performed under different switching events that cause fluctuations in the voltage signal under normal operation. These fluctuations can create a real nuisance in the identification process. These events primarily arise from transient variations in system variables, including abrupt variations in electrical load, changes in load magnitude, capacitor switching, or the startup of induction motors. To validate the effectiveness of the proposed method under these normal non-islanding conditions, comprehensive simulations were conducted. These simulations included varying the load up to 100%, switching the capacitor bank with ratings ranging from 10 MVAR to 200 MVAR, and starting induction motors with ratings up to 600 hp. The results of the proposed IDM obtained by simulating the above scenarios are presented in Table 1. As evident from the table, all simulated scenarios were accurately identified as non-islanding events, with the IDI consistently remaining below the threshold value of 100.
Simulations were also conducted under noisy measurement conditions. The proposed scheme performed effectively with a signal-to-noise ratio (SNR) of 35 dB or above. However, for the SNR of less than 35dB, misidentifications began to occur.
Performance under sudden load change scenarios
The efficacy of the proposed IDM is assessed by considering sudden load change scenarios. Several Load change scenarios for both synchronous-based DG systems and inverters were simulated by connecting a three-phase dynamic load at different locations, with the load block time interval set to 0.5 s. The simulation results observed at Bus-2 during the sudden load change at the same bus are presented in Fig. 3. The figure clearly depicts that the proposed IDM operates without malfunctions when subjected to abrupt load changes. The IDI remains below the threshold, with a brief spike around the 0.5-second mark. This temporary increase indicates a momentary disturbance due to the load change. However, the IDI does not exceed the threshold. This confirms that the proposed IDM effectively distinguishes load switching events from islanding events.

Performance of the proposed IDM under abrupt load change.
Performance under capacitor switching events
Rapid switching of the capacitor banks can cause significant variations in the system output characteristics. These variations may produce notable patterns in the voltage waveforms, which may be misinterpreted as islanding events. Therefore, to assess the efficacy of the suggested IDM under such situations, several capacitor switching events with a capacitor bank of 10 MVAR to 200 MVAR were simulated at all buses of the IEC microgrid. The proposed IDM successfully differentiated all the capacitor switching event from islanding ones. Figures 4 and 5 illustrate the results at Bus 2 and Bus 3 when capacitor banks of 20 MVAR and 130 MVAR are introduced into the network at 0.5 s at Bus 2 and Bus 4, in the respective order. The figures indicate that the proposed IDM remains stable, with no false detections during capacitor switching. The ability to maintain correct detection under such conditions confirms the reliability and robustness of the IDM in non-islanding scenarios, validating its applicability in practical systems where transient events like capacitor switching is common.

Performance of the proposed IDM during 10MVAR capacitor switching at Bus 2.

Performance of the proposed IDM during 120MVAR capacitor switching at Bus 3.
Induction motor starting
The start of an induction motor necessitates a short-term but considerable influx of reactive power. This results in severe variations to the voltage and current signals. The sudden variations have the potential to induce signatures that resemble islanding circumstances, thereby leading to the breakdown of islanding detection methods. In order to evaluate the efficacy of the proposed IDM, a 300 hp induction motor was attached to Bus 3 and 100hp induction motor at Bus-2 at a time of t = 0.5 s. The simulation results obtained at Bus-3 and Bus − 2 is shown in Figs. 6 and 7. The figure show that the presented approach does not consider the induction motor starting event as islanding event.

Performance of the proposed IDM during 300hp induction motor starting at Bus 3.

Performance of the proposed IDM during 100 hp induction motor starting at Bus 2.
Performance under islanding operating conditions
To assess the efficacy of the proposed IDM under various islanding scenarios, a series of islanding events were simulated on the IEC microgrid with an RLC load and a range of load–generation mismatches. As summarised in Table 2, islanding was correctly identified for mismatches as small as 2% for inverter-interfaced DGs and 3.5% for synchronous-based DGs. The proposed IDM detected the islanding within 4–6 fundamental cycles for the load generation imbalance less than 10%. On the other hand, the proposed IDM only required upto 2.5 cycles to detect islanding for load generation imbalance exceeding 10%. This satisfies the rapid-clearance requirement specified by IEEE Std 1547. The introduction of additive white Gaussian noise with a SNR of 35 dB or higher did not affect the performance; however, when the SNR dropped below 35 dB, the NDZ expanded significantly. Collectively, these results demonstrate the robustness of the proposed algorithm under realistic operating conditions and its inherently small NDZ.
Islanding detection under parallel RLC load
Islanding detection in microgrid with a parallel RLC load is widely regarded as a benchmark scenario for evaluating passive IDMs. To verify the effectiveness of the proposed method, an islanding event was created by connecting a constant-impedance parallel RLC load to Bus 2 and Bus 4. At =0.5 s, an islanding condition was triggered by opening the circuit breakers associated with Zone-2 (synchronous DG) and Zone 4 (inverter DG). The results, as illustrated in Figs. 8 and 9, demonstrate that the proposed method successfully detected the islanding event with high accuracy. The IDI for both synchronous- and inverter-based DGs cases exceeded the therhold value of 100. The islanding event was detects for the RLC load with 1.5 cycles. The proposed IDM correctly recognized islanding in synchronous- and inverter-based DGs. The quick response time of the IDM underscores its capability to reliably identify islanding conditions in real-world scenarios.

Performance of the proposed IDM during an islanding condition at Bus 4 for inverter based DGs connected to parallel RLC load.

Performance of the proposed IDM during an islanding condition at Bus 2 for synchronous based DGs connected to parallel RLC load.
Islanding detection under small load-generation imbalance
To assess the efficiency of the suggested approach under small load generation imbalance, extensive simulations were performed to detect islanding in the presence of 0–30% load generation imbalance. The islanding scenario was initiated by tripping the circuit breakers associated with Bus 4 and Bus 2 for both inverter-based DGs and synchronous machine-based DGs at t = 0.5 s. The results depicted that the proposed IDM detected all the islanding scenarios with load generation imbalance of greater than ± 2%. However, the proposed IDM struggles to identify the islanding events when the load generation mismatch is less than ± 2%. The simulation results for obtained at Bus 2 for a load generation imbalance of 2.5% for an inverter-based DG are shown in Fig. 10. It is clear from the figure that the proposed IDM accurately detected the islanding within 1 cycle. The IDI is well above the threshold values of 100. These findings confirm that the proposed methodology is capable of effectively identifying the islanding events for small load generation mismatch within minimal time frame.

Performance of the proposed IDM during a load generation mismatch of 4% for synchronous-based DGs.
To assess the efficacy of the suggested approach under small generation load mismatch for synchronous-based DG, an islanding event was simulated for the Zone-4. The islanding scenario was initiated at t = 0.5 s by tripping the circuit breakers associated with Bus. The effectiveness of the suggested approach IDM under this condition is shown in Fig. 11. The results clearly depict that the proposed IDM successfully identified the islanding events with small load generation mismatch for synchronous based DGs. Moreover, the IDI was greater than threshold which led that the proposed scheme achieved real time islanding event detection within one cycle.

Performance of the proposed IDM during a load generation mismatch of 3.5% for inverter based DGs.
Performance under hybrid inverter and synchronous-based DG system
The performance of the suggested IDM also is assessed for hybrid synchronous and inverter-based DG system as well. In order to achieve these scenarios, numerous simulations were carried out in Zone-1 and Zone-2 under various operating scenarios. Figure 12 shows the simulation results for islanding event with 10% load generation mismatch at PCC. It can be observed from the figure that proposed IDI is well above threshold value of 100 and successfully detected islanding events both in synchronous and inverter based DGs system.

Performance of the proposed IDM during a load generation mismatch of 4% for synchronous-based DGs.
Comparative analysis
The proposed IDM fundamentally differs from recent deep learning-based IDMs in both design philosophy and operational practicality. Unlike data-driven models such as ANN, SVM, or CNN that require large volumes of labeled training data and complex parameter tuning, the proposed method is entirely physics-based and data-independent. It relies on a time–frequency energy measure derived from the Wigner–Ville distribution and uses a fixed threshold to detect islanding conditions, thereby eliminating the need for model training or retraining. This significantly reduces implementation complexity and enhances reliability. Additionally, the method is computationally efficient, requiring only simple convolution operations suitable for microcontroller-based relays. In contrast, deep learning approaches often depend on GPU or edge-AI platforms. In terms of explainability, IDI rises in direct response to observable signal anomalie, such as energy concentration and statistical deviation, which makes its behavior transparent and interpretable. Moreover, the method demonstrates strong robustness to unseen grid events, including abrupt load changes, capacitor switching, and motor starts, without the need for adaptation. Conversely, AI-based models tend to perform well only within the bounds of their training data and may misclassify novel conditions. A qualitative comparison of the porposed IDM againt deep learning methods/AI methods is given in Table 3.
To validate the effectiveness, a comparison was carried out between the proposed IDMs and under-voltage/over voltage protection (UVP/OVP), rate of change of frequency (ROCOF), wavelet transform (WT)-based IDM, and superimposed voltage based methods in terms of NDZ and detection time.
The comparative evaluation of the proposed IDM against these schemes is presented in Table 4. ROCOF and OVP/UVP exhibit relatively large NDZs, ranging from ± 15–25%, indicating that these methods may fail to detect islanding when the power mismatch is small. Additionally, their detection times span between 5 and 8 cycles, making them slower and potentially unsuitable for scenarios requiring rapid response. The superimposed component method improves upon this by achieving a smaller NDZ of ± 5–8% and faster detection within 1–2 cycles; however, it may be susceptible to false tripping in the presence of non-islanding disturbances. The Wavelet Transform method further reduces the NDZ to ± 4–6% while maintaining quick detection, but its reliance on intensive computations makes it less practical for low-resource systems. In contrast, the proposed method achieves a balanced performance with an NDZ of ± 5–6% and detection times ranging from 2.5 to 6 cycles. Although its NDZ is marginally higher than that of the wavelet-based approach, it maintains high detection reliability without the need for large computational resources or training data. This makes the proposed method particularly advantageous for real-time applications in distributed generation systems, where both accuracy and practical implementation are critical.
Conclusion
DG plays an important role to increase the resilience and to reduce the carbon emissions among other benefits on power distribution networks. However, it also brings the new problem of unintended islanding. This paper introduced a new islanding detection technique based on the Wigner Distribution Function and Alienation Index. Initially, the modal voltage signal was computed from the superimposed three-phase voltage signals. Then IDI was calculated from the WDF and AI. Finally IDI was assessed against a threshold value to identify islanding events in the grid-connected DG systems. The proposed technique was rigorously validated using MATLAB/SIMULINK simulations across various islanding and non-islanding scenarios under different load conditions. The results verified its viability to identify the islanding for inverter-based and synchronous DGs. The method succeeded in islanding detection of all conditions when the power mismatch surpasses ± 2% for inverter-based DG and ± 3.5% for synchrous-based DGs. This shows that the proposed IDM can effectively improve modern power distribution networks with regards to reliability and safety.
Although the proposed IDM detected islanding under various scenarios, its validation remains limited to simulation studies. Moreover, the fixed threshold approach could restrict adaptability in changing grid conditions. Future work will therefore include practical hardware validation and adaptive threshold optimization. Additionally, extensive testing under complex grid scenarios, and expanded disturbance conditions need to be conducted to enhance overall robustness and facilitate practical deployment.
Data availability
The data that support the findings of this study are available from the Corresponding Author upon reasonable request.
References
Hussain, A., Mehdi & Kim, C. H. A communication-less islanding detection scheme for hybrid distributed generation systems using recurrent neural network. Int. J. Electr. Power Energy Syst. 155, 109659 (2024).
Larik, N. A., Tahir, M. F., Elbarbary, Z. S., Yousaf, M. Z. & Khan, M. A. A comprehensive literature review of conventional and modern islanding detection methods. Energy Strategy Rev. 44, 101007 (2022).
Seyedi, M., Taher, S. A., Ganji, B. & Guerrero, J. A hybrid islanding detection method based on the rates of changes in voltage and active power for the multi-inverter systems. IEEE Trans. Smart Grid. 12 (4), 2800–2811 (2021).
Azim, R. et al. A decision tree based approach for microgrid islanding detection, in 2015 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), IEEE, 2015, pp. 1–5. Accessed 04 Sep 2024. Available: https://ieeexplore.ieee.org/abstract/document/7131809/
Vahedi, H., Gharehpetian, G. B. & Karrari, M. Application of duffing oscillators for passive islanding detection of inverter-based distributed generation units. IEEE Trans. Power Deliv. 27 (4), 1973–1983 (2012).
Aazami, R. et al. Deep neural networks based method to islanding detection for multi-sources microgrid. Energy Rep. 11, 2971–2982 (2024).
Haider, R., Kim, C. H., Ghanbari, T. & Bukhari, S. B. A. Harmonic-signature‐based islanding detection in grid‐connected distributed generation systems using kalman filter,” IET renew. Power Gener 12(15), 1813–1822 (2018).
Committee, I. S. IEEE standard for interconnecting distributed resources with electric power systems. IEEE Stand. 1547 (2003).
Hussain, A., Kim, C. H. & Mehdi, A. A comprehensive review of intelligent islanding schemes and feature selection techniques for distributed generation system. IEEE Access. 9, 146603–146624 (2021).
Narang, D. J. & Siira, M. An In-Depth Review of the IEEE P1547 (Revision) Draft Standard-Session 1: Context and Overview. 2018. Accessed 04 Sep 2024. https://www.osti.gov/servlets/purl/1425574
Etxegarai, A., Eguía, P. & Zamora, I. Analysis of remote islanding detection methods for distributed resources, in Int. conf. Renew. Energies power quality, 2011. Accessed 04 Sep 2024. [Online]. Available: https://www.researchgate.net/profile/Pablo-Eguia-2/publication/316926294_Analysis_of_remote_islanding_detection_methods_for_distributed_resources/links/591b08f84585156952828ba5/Analysis-of-remote-islanding-detection-methods-for-distributed-resources.pdf
Lin, Z. et al. Application of wide area measurement systems to islanding detection of bulk power systems. IEEE Trans. Power Syst. 28 (2), 2006–2015 (2013).
Ropp, M. E., Aaker, K., Haigh, J. & Sabbah, N. Using power line carrier communications to prevent islanding [of PV power systems], in Conference Record of the Twenty-Eighth IEEE Photovoltaic Specialists Conference-2000 (Cat. No. 00CH37036), IEEE, 2000, Accessed 04 Sep 2024. Available: https://ieeexplore.ieee.org/abstract/document/916224/
Alzahrani, S., Sinjari, K. & Mitra, J. An advanced control and protection integration scheme for microgrids. Sustain. Energy Grids Netw. 32, 100940 (2022).
Raza, S., Mokhlis, H., Arof, H., Laghari, J. A. & Wang, L. Application of signal processing techniques for islanding detection of distributed generation in distribution network: A review. Energy Convers. Manag. 96, 613–624 (2015).
Vadlamudi, B. & Anuradha, T. Review of islanding detection using advanced signal processing techniques. Electr. Eng. 106 (1), 181–202 (2024).
Reigosa, D., Briz, F., Charro, C. B., García, P. & Guerrero, J. M. Active islanding detection using high-frequency signal injection. IEEE Trans. Ind. Appl. 48 (5), 1588–1597 (2012).
Chiang, W. J., Jou, H. L., Wu, J. C., Wu, K. D. & Feng, Y. T. Active islanding detection method for the grid-connected photovoltaic generation system. Electr. Power Syst. Res. 80 (4), 372–379 (2010).
Gao, Y., Ye, J., Improved slip mode frequency-shift islanding detection method. in 2019 International Conference on Virtual Reality and Intelligent Systems (ICVRIS), IEEE, 2019, pp. 152–155. Accessed 07 Nov. 2024. Available: https://ieeexplore.ieee.org/abstract/document/8920803/
Lopes, L. A. & Sun, H. Performance assessment of active frequency drifting islanding detection methods. IEEE Trans. Energy Convers. 21 (1), 171–180 (2006).
Zeineldin, H. H. & Kennedy, S. Sandia frequency-shift parameter selection to eliminate nondetection zones. IEEE Trans. Power Deliv. 24 (1), 486–487 (2008).
Karimi, H., Yazdani, A. & Iravani, R. Negative-sequence current injection for fast islanding detection of a distributed resource unit. IEEE Trans. Power Electron. 23 (1), 298–307 (2008).
Dubey, A. K., Kumar, A. & Mishra, J. P. Robust adaptive active islanding detection with $$\backslash$alpha $-axis disturbance injection under high impedance fault, unbalanced loading, and phase failure in grid tied PV system. IEEE J. Emerg. Sel. Top. Ind. Electron. 4(4), 1213–1223 (2023).
Admasie, S., Bukhari, S. B. A., Haider, R., Gush, T. & Kim, C. H. A passive islanding detection scheme using variational mode decomposition-based mode singular entropy for integrated microgrids. Electr. Power Syst. Res. 177, 105983 (2019).
Do, H. T., Zhang, X., Nguyen, N. V., Li, S. S. & Chu, T. T. T. Passive-islanding detection method using the wavelet packet transform in grid-connected photovoltaic systems. IEEE Trans. Power Electron. 31 (10), 6955–6967 (2015).
Ozcanli, A. K. & Baysal, M. Islanding detection in microgrid using deep learning based on 1D CNN and CNN-LSTM networks. Sustain. Energy Grids Netw. 32, 100839 (2022).
Vadlamudi, B. & Optimized Hybrid, A. T. Based islanding detection of solar-wind power System. Optimized hybrid CNN-LSTM based islanding detection of solar-wind power system.. Electr. Power Compon. Syst. 52(3), 337–355. https://doi.org/10.1080/15325008.2023.2220333 (2024).
Samet, H., Hashemi, F. & Ghanbari, T. Islanding detection method for inverter-based distributed generation with negligible non‐detection zone using energy of rate of change of voltage phase angle,” IET Gener.. Transm. Distrib. 9(15), 2337–2350. https://doi.org/10.1049/iet-gtd.2015.0638 (2015).
Yingram, M. & Premrudeepreechacharn, S. Over/Undervoltage and Undervoltage Shift of Hybrid Islanding Detection Method of Distributed Generation. Sci. World J https://doi.org/10.1155/2015/654942. (2015).
Teoh, W. Y. & Tan, C. W. An overview of islanding detection methods in photovoltaic systems. Int. J. Electr. Comput. Eng. 5 (10), 1341–1349 (2011).
Ning, J. & Wang, C. Feature extraction for islanding detection using wavelet transform-based multi-resolution analysis, in 2012 IEEE Power and Energy Society General Meeting, IEEE, 2012, pp. 1–6. Accessed 04 Sep 2024. Available: https://ieeexplore.ieee.org/abstract/document/6345061/
Hashemi, F. & Mohammadi, M. Islanding detection approach with negligible non-detection zone based on feature extraction discrete wavelet transform and artificial neural network: Islanding Detection. Int. Trans. Electr. Energy Syst. 26(10), 2172–2192. https://doi.org/10.1002/etep.2197 (2016).
Mlakić, D., Baghaee, H. R. & Nikolovski, S. A novel ANFIS-based islanding detection for inverter-interfaced microgrids. IEEE Trans. Smart Grid. 10 (4), 4411–4424 (2018).
Bakhtavar, E., Aghayarloo, R., Yousefi, S., Hewage, K. & Sadiq, R. Renewable energy based mine reclamation strategy: a hybrid fuzzy-based network analysis. J. Clean. Prod. 230, 253–263 (2019).
Arévalo, P., Cano, A., Benavides, D. & Jurado, F. Fault Analysis in Clustered Microgrids Utilizing SVM-CNN and Differential Protection. Appl. Soft Comput. 164, 112031 (2024).
Menon, V. & Nehrir, M. H. A hybrid islanding detection technique using voltage unbalance and frequency set point. IEEE Trans. Power Syst. 22 (1), 442–448 (2007).
Nikolovski, S., Baghaee, H. R. & Mlakić, D. Islanding detection of synchronous generator-based DGs using rate of change of reactive power. IEEE Syst. J. 13 (4), 4344–4354 (2019).
Mahat, P., Chen, Z. & Bak-Jensen, B. A hybrid islanding detection technique using average rate of voltage change and real power shift. IEEE Trans. Power Deliv. 24 (2), 764–771 (2009).
Bartelt, H. O., Brenner, K. H. & Lohmann, A. W. The wigner distribution function and its optical production. Opt. Commun. 32 (1), 32–38 (1980).
Bastiaans, M. J. Application of the Wigner distribution function in optics, in The Wigner Distribution-Theory and Applications in Signal Processing, Elsevier, 1997, pp. 375–426. Accessed 07 Nov. 2024. Available: https://research.tue.nl/en/publications/application-of-the-wigner-distribution-function-in-optics
Waqar, H., Bukhari, S. B. A., Wadood, A., Albalawi, H. & Mehmood, K. K. Fault identification, classification, and localization in microgrids using superimposed components and wigner distribution function. Front. Energy Res. 12, 1379475 (2024).
Hashemi, S. M., Hagh, M. T. & Seyedi, H. Transmission-line protection: a directional comparison scheme using the average of superimposed components. IEEE Trans. Power Deliv. 28 (2), 955–964 (2013).
Li, X., Lu, Y., Huang, T., Qin, J. & Jiang, W. Superimposed components-based distance protection of lines emanating from DFIG-based wind farms. Electr. Power Syst. Res. 208, 107916 (2022).
Bukhari, S. B. A., Mehmood, K. K., Wadood, A. & Park, H. Intelligent islanding detection of microgrids using long short-term memory networks. Energies 14 (18), 5762 (2021).
Acknowledgements
The authors extend their appreciation to the Research, Development, and Innovation Authority (RDIA), Saudi Arabia for funding this work through Grant number (13385-Tabuk-2023-UT-R-3-1-SE).
Funding
This article is derived from a research grant funded by the Research, Development, and Innovation Authority (RDIA)—Kingdom of Saudi Arabia—with grant number (13385-Tabuk-2023-UT-R-3-1-SE).
Author information
Authors and Affiliations
Contributions
Conceptualization, Abdul Wadood, Syed basit ali bukhari Hani Albalawi, Aadel Mohammed Alatwi; Investigation Abdul wadood, syed basit ali bukhari, Hani Albalawi and Aadel Mohammed Alatwi; Methodology, Abdul wadood, syed basit ali bukhari, Hani Albalawi, Aadel Mohammed alatwi, Hani Albalawi, Abdul Wadood Project administration, Hani Albalawi; Resources, Aadel mohammed alatwi, syed basit ali bukhari, Software, Hani Albalawi and Aadel Mohammed Alatwi; Supervision, syed basit ali bukhari, Hani Albalawi and Abdul Wadood; Validation, Abdul Wadood, Syed basit ali bukhari Hani Albalawi, Aadel Mohammed Alatwi, Hani Albalawi, Writing original draft, Abdul Wadood, Syed basit ali bukhari Hani Albalawi, Aadel Mohammed Alatwi; Writing review & editing, Abdul Wadood, Syed basit ali bukhari Hani Albalawi, Aadel Mohammed Alatwi.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Albalawi, H., Bukhari, S.B.A., Alatwi, A.M. et al. Superimposed modal voltage based passive islanding detection of grid tied distributed generation using Wigner distribution function. Sci Rep 15, 28478 (2025). https://doi.org/10.1038/s41598-025-13244-4
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-13244-4
