
Abstract
This paper proposes a flexible and energy-efficient power conversion system capable of bidirectional energy flow between AC and DC microgrids, as well as electric vehicles (EVs). The converter is designed by integrating fundamental DC/DC topologies-namely Push-Pull and Half-Bridge converters-with a multi-level DC/AC inverter. It supports multiple operating modes, enabling seamless integration of both fixed and mobile EV charging stations through dedicated DC/DC charging interfaces tailored to various system configurations. A hierarchical multi-agent control strategy is employed, with clearly defined roles for each converter control component to enable coordinated operation across diverse use cases. Simulation results conducted in MATLAB demonstrate a high power factor of up to 96.5% during both EV charging and discharging processes to the interconnected microgrids. The system accommodates EV input voltages ranging from 350 to 1500 VDC and currents from 15 to 45 A, covering a wide range of medium to fast charging levels. The optimal switching frequency is determined through a detailed power loss analysis across input and output stages. The proposed converter offers a compact design, supports a wide range of voltage levels with low battery-side ripple, and ensures efficient bidirectional energy conversion between various grids.
Similar content being viewed by others
Introduction
Owning an electric vehicle (EV) or hybrid vehicle offers more than just an environmentally friendly mode of transportation-it contributes to a broader green energy transition1,2,3. With the implementation of bidirectional charging technology, EVs can not only reduce energy consumption and charging costs but also potentially generate income by supplying energy back to the grid or home systems4,5,6. These benefits are enabled when the EV is charged via a DC microgrid that appropriately adjusts voltage and current parameters7,8,9,10, or through the conversion of AC microgrid power to DC-compatible with EV battery requirements11,12. This power conversion is typically managed either by the onboard inverter of the vehicles or by an inverter integrated within the charging station13,14,15,16. To supply energy back to household loads or the utility grid, the DC energy stored in the EV battery must be converted to AC. While commercially available bidirectional EV chargers are still limited, they all incorporate inverters capable of performing DC-AC conversion and controlling the bidirectional flow of power17.
Continuously monitored charging refers to electric vehicle (EV) charging-whether unidirectional or bidirectional-where the charging process, including timing and power levels, is automatically regulated by a monitoring system rather than a simple manual switch18,19,20. This control is typically enabled through a data communication link between the EV and the charging station. For instance, smart charging applications allow users to schedule and manage charging sessions remotely via smartphone interfaces21. With flexible charging, vehicles can remain connected to the charger without continuously drawing power. Instead, charging can be dynamically scheduled based on electricity pricing, grid demand, or user preferences. This approach enables both EV owners and energy providers to optimize charging periods for cost-effectiveness, such as leveraging off-peak nighttime rates offered by many utility companies. In addition to financial savings, monitored and scheduled charging helps mitigate the risk of simultaneous charging events that could otherwise place excessive strain on the power grid.
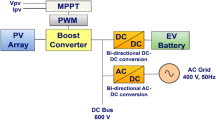
Vehicle-to-Grid (V2G) technology enables bidirectional energy transfer between electric vehicles (EVs) and the power grid, facilitated by a DC-to-AC conversion system that is either integrated into the EV charger or implemented externally22,23. V2G allows stored energy in EV batteries to be fed back into the grid, thereby supporting energy demand management at local, regional, and national levels through flexible charging strategies, as illustrated in Fig. 1. This approach enables EVs to charge during periods of low electricity demand (off-peak hours) and discharge energy back to the grid during periods of high demand (peak hours). Given that vehicles are typically parked for approximately 90% of the day, they present a significant opportunity to function as distributed energy storage units when connected to the grid. With appropriate infrastructure and scheduling, parked EVs can act as mobile energy reservoirs, contributing to grid stability and ensuring a more reliable energy supply.

Block diagram of flexible micro-grid electric vehicle charging system.
Bidirectional electric vehicle (EV) chargers can also be used to supply electrical power from an EV battery to residential buildings, a concept commonly referred to as Vehicle-to-Home (V2H)24,25. This process involves a DC-to-AC conversion system, typically integrated within the EV charger, enabling the energy stored in the EV battery to power household loads. Similar to Vehicle-to-Grid (V2G) systems, V2H can contribute to local or broader grid stability by shifting energy usage patterns. For instance, an EV can be charged during off-peak nighttime hours when electricity demand is low, and later supply power to a home during daytime peak periods. This not only helps reduce household energy costs but also alleviates stress on the grid during high-demand intervals. V2H thus plays a dual role in enhancing energy reliability at the household level while supporting overall grid efficiency and resilience.
Both Vehicle-to-Grid (V2G) and Vehicle-to-Home (V2H) technologies are expected to play increasingly significant roles in the transition toward fully renewable energy systems26. This is primarily due to the inherent intermittency of renewable energy sources, which generate electricity at varying levels depending on time of day, weather conditions, and seasonal patterns27. For instance, solar panels produce a peak output during daylight hours28, while wind turbines generate power only when sufficient wind is available29. Bidirectional charging enables electric vehicles (EVs) to serve as distributed energy storage units, unlocking their potential to support the grid by storing surplus renewable energy during periods of excess generation and supplying it during peak demand or low-generation periods. In this way, EVs contribute not only to transportation decarbonization but also to enhancing the flexibility, reliability, and sustainability of renewable-based energy systems.
Furthermore, the energy conversion process involving power grids integrated with EV charging stations is illustrated in Fig. 1. This configuration highlights the continuous and flexible power supply to microgrids equipped with EV charging infrastructure. Such integration not only enhances energy efficiency and cost savings for EV users but also promotes environmentally conscious behavior and raises awareness of energy security at both regional and national levels.
Electric vehicles (EVs) are already more cost-effective to own and operate compared to traditional internal combustion engine vehicles30. The use of bidirectional chargers, as opposed to conventional unidirectional DC chargers, can further enhance cost savings-particularly in regions with time-of-use electricity pricing. When combined with personal renewable energy systems, such as rooftop solar panels, bidirectional charging enables greater energy autonomy31. In this setup, excess solar energy generated during the day can be stored in the EV battery and later used to power the home during nighttime hours, for future driving needs, or during periods of high electricity demand, thereby maximizing renewable energy utilization and reducing dependency on the grid.
This section outlines the methodology employed in the study. It includes a description of the study area and an evaluation of the region’s solar and wind energy potential. The development of AC and DC microgrids, along with the integration of electric vehicle (EV) charging stations and their optimal charging strategies, is also presented. Emphasis is placed on the design and implementation of flexible power converters that enable the interconnection of AC and DC microgrids, while facilitating the integration of distributed energy resources32,33,34,35,36,37.
The research was conducted in Ha Long City, located in Quang Ninh Province in the northeastern region of Vietnam38. Quang Ninh lies within the humid subtropical climate zone typical of northern Vietnam, characterized by its unique coastal and mountainous geography. The region experiences hot, humid summers with high rainfall, and cold, dry winters with minimal precipitation. Overall, the dominant climatic condition is tropical humidity. Geographically, Quang Ninh is significantly influenced by the northeast monsoon and to a lesser extent by the southwest monsoon, compared to other northern provinces. Situated in the tropical belt, the province receives direct solar radiation twice annually as the sun passes through the zenith, giving it considerable solar and thermal energy potential. The current electric vehicle (EV) demand in the region exceeds 1500 units, indicating a growing interest in sustainable transportation solutions (Fig. 2).

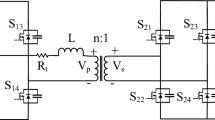
Proposed converter circuit diagram.
This concept of bidirectional energy exchange extends beyond individual households to larger residential complexes and entire communities. Achieving true energy self-sufficiency at the community level involves the collective management and sharing of locally generated renewable energy. Initiatives such as microgrids-like the one established in Ha Long-serve as localized energy marketplaces that facilitate the distribution of resident-generated renewable energy. Within such systems, electric vehicles (EVs) can play a critical role by acting as mobile energy storage units, enabling users to collect, store, and sell excess energy back to the community grid. Thus, bidirectional charging technology has the potential to become a key enabler in community-driven renewable energy programs, supporting decentralized, self-sufficient energy networks that go beyond the scope of individual households.
The system architecture illustrated in Fig. 1 integrates a converter system comprising DC/DC converters and bidirectional DC/AC converters. These converters are capable of voltage regulation-both step-up and step-down-and can operate independently or in coordination to manage energy exchange among AC microgrids, DC microgrids, and EV charging stations. The converter control strategy is based on a multi-agent system, which dynamically adapts to real-time operating conditions by responding to variations in power demand and supply across loads, energy sources, and storage systems within both AC and DC microgrids, as well as the EV charging infrastructure. This control framework enables the converter to execute energy management tasks effectively, facilitating the optimal transfer of energy from renewable sources and storage systems. The approach enhances operational efficiency, reduces excess renewable energy generation, and minimizes the total installed capacity required for renewable energy deployment (Fig. 3).

Operation of the switching devices and current flow in Case 1: (a) IGBT1 ON, (b) IGBT2 ON.
Power converter proposal
The circuit diagram of the proposed three-port bidirectional converter for electric vehicles (TBEV) is shown in Fig. 2. The converter supports the exchange of electrical energy between two AC and DC microgrids and serves an EV charging station. The system for this converter is basically combined from a push-pull structure with four main switches capable of bidirectional energy conversion corresponding to the four windings of the pulse transformer, where the primary side is connected to the DC microgrid through inductors \(L_{11}\) and \(L_{12}\). On the secondary side, inductor \(L_{21}\), with four times the number of turns compared to the primary coils, connects to a Half-Bridge charger for EVs, while inductor \(L_{22}\) interfaces with the AC microgrid via a three-phase multilevel DC/AC inverter. The push-pull stage includes two bidirectional switches, \(IGBT_{1}\) and \(IGBT_{2}\). The EV charging circuit utilizes a diode \(D_{3}\) connected in parallel using switch \(IGBT_{3}\), forming part of the Half-Bridge unit. The AC microgrid interface employs a three-phase multilevel inverter bridge to handle AC conversion with switch IGBT4. The important converter operation for flexibility and efficiency is included in the solution of the IGBT1-IGBT4 main switches.
The converter’s architecture is designed to support independent and bidirectional energy transfer between all ports, enabling flexible distribution of energy sourced from renewable generation, energy storage systems, and EVs. This bidirectional power flow control addresses the challenge of distributing energy based on dynamic priority loads and variable input sources. The proposed topology thus enhances the overall energy management of the system, aiming to optimize the use of distributed energy resources and maximize power efficiency through intelligent load and source prioritization.
The operating principle of the proposed system is illustrated through specific scenarios that reflect varying power supply and load demand conditions. These scenarios take into account dynamic changes in circuit parameters resulting from environmental factors and real-time load requirements, in accordance with predefined operating rules. In the power conversion subsystem, the converter operates under 12 operating cases, covering both DC and AC grid interactions. Special emphasis is placed on the electric vehicle (EV) charging station, under the typical assumption that EVs are charged during off-peak nighttime hours and discharge energy back to the grid during daytime peak demand periods.
Case 1 involves energy conversion through both DC/DC and DC/AC pathways, in this conversion process, two stages of energy conversion are performed, which are (1) energy conversion from DC microgrid to EV charging station, in this conversion process, the converter performs two stages of boosting through DC/DC converter form isolated connection with bidirectional DC/DC converter both are DC/DC conversion, so the implementation is combined with 6 main switches and one diode D1; (2) energy conversion from DC microgrid to AC microgrid also performs two stages of push-pull and 3-phase inverter bridge with DC/DC to DC/AC conversion, the operation of the circuit is performed with 8 main switches with one diode D2 as shown in Fig. 2. This case has basically all the active power switching elements because the loss on the elements is increased during the energy conversion process. In this scenario, energy generated from renewable sources within the DC microgrid is distributed to both the EV charging station and the AC microgrid loads. As illustrated in Figs. 4 and 5, the simulation results demonstrate the system’s energy flow under these conditions. Specifically, Fig. 6b indicates that the AC microgrid load consumes approximately 7% of the total power supplied by the DC microgrid, while the remaining 93% is delivered to the EV charging station. This case exemplifies a typical operating mode in which the system prioritizes EV charging while still supplying a portion of energy to the AC grid.

Case 1, 2, and 3 DC microgrid graph.

Case 1 and 2 EV charging station graph.

Case 1 and 3 AC microgrid graph.
The expression used to calculate the output voltage at the electric vehicle (EV) terminal
where \(V_{L1}\) is the voltage at coil \(L_{1}\) in Fig. 2a; \(N_{p}\) is coil on the DC microgrid side; \(N_{s}\) is coil on the EV side, \(N_{s} = 4.5 \cdot N_{p}\); \(V_{D1}\) is voltage across diode \(D_{1}\); \(d_{1}\) is the duty cycle of \(IGBT_{1}\) or \(IGBT_{2}\) switch unlocking.
In this operating case, the available renewable energy in the DC microgrid exceeds the combined energy demand of the DC microgrid loads, the EV charging station, and the AC microgrid loads.
The circuit includes switching devices \(IGBT_{1}\) and \(IGBT_{2}\), along with diodes \(D_{3}\) and \(D_{4}\), as illustrated in Fig. 2a. These components, along with their counterparts in Fig. 2b,c, operate in coordination under the control strategy outlined in the system diagram of Fig. 2. In Case 1, the DC microgrid provides an input voltage of 350 VDC, which is applied to inductors \(L_{11}\) and \(L_{12}\), as depicted in the simulation results in Fig. 4a. The corresponding current drawn from the DC microgrid is shown in Fig. 4b, and the switching power characteristics are illustrated in Fig. 4c. The EV charging circuit receives a voltage of 1500 VDC, as demonstrated in Fig. 5a,b, meeting the charging voltage requirement for electric vehicles. The EV charging station operates at a power level of 15 kW, as indicated in Fig. 4d.
The AC microgrid load receives approximately 1 kW of power, as shown in Fig. 6e. The voltage and current waveforms of the three-phase grid connection, depicted in Fig. 6b,c, exhibit clean sinusoidal shapes, reflecting a stable and balanced system operation. The corresponding control pulses for each phase, presented in Fig. 6d, demonstrate the application of a phase-specific pulse-width modulation (PWM) control strategy. In this case, the AC load is modeled as a resistive-inductive (R-L) load to closely replicate realistic grid-connected conditions.
Figure 7b presents the harmonic analysis for the DC/AC conversion process from the DC microgrid to the AC grid. The total harmonic distortion (THD) of the current in the AC microgrid is measured at 7.8%, while the voltage THD reaches 9.2%. Furthermore, the converter exhibits a peak internal harmonic distortion of 6.1%. These values are considered acceptable for grid-connected power electronic systems and comply with common standards for harmonic performance in distributed energy applications.

THD analysis for case 1: (a) Grid voltage, (b) Grid current, (c) Converter voltage.
The primary winding is connected in series with IGBT1 in operation. The secondary winding is connected to the EV in operation. D1 and L1 are operating. IGBT2, IGBT3, and IGBT4 are not operating. D2 and L2 are operating with the AC grid.
where \(n_{1}\) is the winding number of the transformer between DC grid and EV.
where \(d_{1,max}\) is the highest duty cycle of the \(IGBT_{1}\). Normally, \(d_{1,max}\) \(\le\) 0.45
Similarly, at the AC microgrid port:
During duty cycle \(d_{2}\), \(IGBT_{2}\) is ON and the D1, D2, L1, and L2 are operated at the EV and AC microgrid ports. The remaining switches, \(IGBT_{1}\), \(IGBT_{3}\), and \(IGBT_{4}\), are not in operation. A similar expression can be obtained by substituting the value of \(D_{2}\). In general, \(d_{1}\) > \(d_{2}\)
The current of \(IGBT_{1}\) and \(IGBT_{2}\) can be obtained as:
Power loss In this case, the power loss calculation takes into account the other operating modes such as DC–EV and DC–AC. The power losses of the main switches \(IGBT_{1}\) and \(IGBT_{2}\) are calculated as follows:
where \(f_{sw}\) is switching frequency of switching devices. \(W_{on}\) and \(W_{off}\) represent the power dissipation in the switching device39.
The power loss of H-bridge converter and multilevel converter are obtained as follow:
The conduction losses of switches \(IGBT_{1}\) and \(IGBT_{2}\) are obtained as the product of the ON-state voltage and the current flowing through the devices:
where \(V_{CE,IGBT1}\) is the voltage when the \(IGBT_{1}\) is ON state. \(i_{avg}\) and \(i_{RMS}\) are the average and the root-mean-square (RMS) values of the switching current.
The power losses associated with the passive components of the converter.
The output power can be obtained as (23):
The total power loss in case 1 can be obtained as expressed in 26. Similarly, the total power loss in this study is presented in Table 2.
The total power loss in case 1 can be obtained as below:
To assess the converter’s dynamic performance, the load at the EV charging station was varied to analyze its response to changes in power demand. In the scenario of increasing load, shown in Fig. 8, the converter demonstrates stable operation. During the period of 0–0.05 s, the load power fluctuates in an increasing direction, leading to the current to the load at the EV charging station port and the AC microgrid increasing in proportion to the load power fluctuations as shown in Fig. 7c. The reason is that the voltage on the energized ports is constant as shown in Fig. 7b, during this period the power flow fluctuates less, the converter system operates stably as shown in Fig. 7d. During the period of 0.05–0.15 s, the power flow supplied from the DC microgrid to the EV and AC microgrid loads does not change much, the energy conversion process is stable as shown in Fig. 7d. Next, at the time interval of 0.15–0.153 s in Fig. 7b,c, the current and voltage fluctuate within a range of approximately 200 V and the current fluctuates with a value of 2.5 A, leading to power fluctuations of the 500W converter as shown in Fig. 7d with a small time interval of 0.001 seconds for this large fluctuation and 0.002 s for the decreasing fluctuation. In contrast, when the load decreases (Fig. 9), the converter’s transient response extends slightly, with voltage, current, and power stabilizing within approximately 0.003 s. Similar to the load-boosting mode, the transient response is caused by the current and voltage parameters of the EV substation load within 0.15–0.165 s. The transient response is smaller when the load decreases than when the load increases, but the transient response is longer, approximately 0.003 s. These results confirm the converter’s capability to effectively manage dynamic load variations with fast response time and stable output characteristics. The proposed power converter performs well in the power conversion process.

Load decrease at t = 0.15 s for case 1: (a) DC Input Voltage (V = 350 V), (b) DC current, (c) DC Output Voltage (V = 400 V), (d) Power.

Load increase at t = 0.15 s for case 1: (a) DC Input Voltage (V = 350 V), (b) DC current, (c) DC Output Voltage (V = 400 V), (d) Power.
For electric vehicles (EVs) equipped with standard battery types, the charging process adheres to a well-defined three-stage profile, as described in37,40,41,42. The process begins with (1) an initial stage in which both current and voltage increase progressively; (2) a constant current or constant voltage stage, where charging proceeds at a steady rate to efficiently deliver energy to the battery; and (3) a final stage, during which the current gradually decreases as the battery nears full capacity, while the voltage either stabilizes or slightly declines.
These stages capture the dynamic changes in battery capacity during the charging process and are fundamental to achieving high charging efficiency, maintaining optimal system performance, and enhancing the overall longevity of the battery.
Case 2 demonstrates the DC/DC energy conversion process, in which renewable energy from the DC microgrid is utilized to supply power to the EV charging station based on user-specific charging requirements. The charging process is classified into three standardized levels. Level 1 corresponds to slow charging, typically lasting around 17 h, with a power range of 1.4–1.9 kW, depending on the battery’s characteristics, and aligned with the IEC 61851-23 standard42,43. Level 2 involves medium-speed charging, completed in approximately 8 h, depending on the EV model43,44. Simulation results for this scenario are shown in Figs. 4 and 5, where Fig. 5b display the charging voltage, Fig. 5c shows the current profile, and Fig. 5d illustrates the battery’s accumulated capacity. Level 3 represents fast charging, typically completed within 30 min depending on the specific EV type43,45. Figure 10a–c respectively show the charging voltage, current, and the total energy delivered from the DC microgrid to the EV battery. This scenario operates on the principle of DC/DC conversion from 350VDC to 1500VDC, which is realized through two types of push-pull converters and H-bridges connected in series, with 6 main switches operating to convert energy. Therefore, this case has lower losses in the power switching elements than case 1.

Case 3 harmonics of the proposed converter..
These results underscore the converter’s ability to support multiple EV charging standards through efficient DC/DC energy conversion, effectively harnessing renewable energy sources to satisfy diverse power levels and charging duration requirements.
In this scenario, it is assumed that the AC microgrid is capable of fully meeting its own load demand, while the DC microgrid generates excess energy from distributed renewable sources. This energy surplus is primarily attributed to photovoltaic (PV) systems operating during peak solar hours, typically between 09:00 and 15:00 in Quang Ninh, Vietnam46. Under these conditions, the system satisfies the operational criteria defined for Case 2, as formulated in Eq. (27)
The core simulation parameters applied in Case 2 are consistent with those used in Case 1. The energy supplied to the EV is illustrated in the results shown in Fig. 5. Despite variations in the EV load demand, the system demonstrates stable energy delivery throughout the simulation period. A comparative analysis of key performance metrics between Case 1 and Case 2 is provided in Table 1, emphasizing the enhanced stability observed in Case 2 under dynamic load conditions.
Case 3 represents a DC/AC energy conversion scenario, wherein the converter transfers power from the DC microgrid to the AC microgrid. In this operating mode, the EV charging station is completely inactive-no electric vehicles are connected, and all internal station loads are disabled. The proposed converter is implemented in two stages of power conversion from DC/DC connected in series with DC/AC and has 8 main switches performing operation and one \(D_{2}\). In this case the power loss on the switches will be larger than in scenario 2 and smaller than the loss value of the switches in scenario 1. As shown in Figs. 4 and 6, the entire power flow is redirected to meet the demand of the AC microgrid. The operating conditions defining Case 3 are as follows: (1) the energy demand at the EV charging station is zero; (2) the load demand of the AC microgrid exceeds the energy available from its local generation and storage systems; and (3) the DC microgrid has excess energy, with total generation and storage capacity surpassing the combined demand of its local DC loads.
In this scenario, the DC microgrid delivers a steady power output of 15 kW, with the corresponding voltage and current waveforms under stable operating conditions illustrated in Fig. 4b. The dynamic response of the system to load changes, including stabilization time, is detailed in Table 1. The quality of power supplied to the AC microgrid is evaluated through the voltage and current signals shown in Fig. 6b,c, which represent the characteristics of a resistive-inductive (R-L) load. Furthermore, Fig. 6e presents the active and reactive power components delivered to the AC load, demonstrating the capability of the converter to effectively manage power distribution under varying load conditions.
The harmonic analysis results for Case 3 are shown in Fig. 10a,b, which present the total harmonic distortion (THD) of the current and voltage waveforms, respectively. The current waveform exhibits a peak THD of 13.8%, while the overall THD associated with the converter during the DC-to-AC energy conversion process is measured at 4.9%, as depicted in Fig. 10c. These harmonic levels fall within acceptable limits for grid-connected converter systems, confirming the converter’s suitability for practical power quality requirements.
In Case 4, energy conversion is initiated from the AC microgrid when the DC microgrid no longer has surplus capacity. The AC microgrid-powered by renewable energy sources such as small-scale hydropower, wind, and solar-experiences excess generation relative to its local load demand, enabling it to supply energy to the EV charging station, as analyzed in the above cases, the operation of the circuit elements in this case is 11 switches with a rectifier-boosted energy conversion type connected in series with two AC/DC stages and a DC/DC boost, so this is a case with a large number of power switches and large power losses, leading to a low efficiency of this case. Similar to Cases 1 and 2, this scenario supports three charging levels. The charging process is facilitated through the AC/DC conversion stage, as illustrated in Fig. 2b,c, with energy transferred from the AC microgrid to the EV charging station in compliance with IEC 61851-1 standards38. The system’s performance for a level 2 charging scenario is detailed in Fig. 12, which presents the charging voltage, current, and accumulated energy capacity of the EV battery. The corresponding power delivered to the EV reaches approximately 4 kW, as shown in Fig. 12(e). The operational conditions for Case 4 are defined as follows: (1) the DC microgrid maintains energy balance between generation, storage, and load; (2) the AC microgrid has surplus energy from renewable generation and storage; and (3) the EV charging station requires energy input.
The corresponding conditional expression for Case 4 is defined as:
Figure 12a illustrates the EV charging voltage waveform, reaching up to 1500VDC, along with the corresponding current and power profiles, all of which align with the requirements for Level 2 EV charging. The harmonic analysis results, presented in Fig. 15, indicate that the total harmonic distortion (THD) of the current during AC-to-DC conversion reaches a maximum of 7.5%, primarily due to second-order components. The voltage THD is measured at 10.1%, while the harmonic distortion introduced by the two-stage converter system is 6.5%. These values confirm that the power quality remains within acceptable limits. Additionally, Case 4 demonstrates stable simulation outcomes and consistent power delivery. Load variation responses and stabilization times are summarized in Table 1, facilitating comparison across all evaluated cases.
During the duty cycle \(d_{3}\), when \(IGBT_{3}\) is gated on, \(D_{1}\), \(IGBT_{1}\), \(IGBT_{2}\), and \(IGBT_{4}\) are not in operation. The diodes of \(IGBT_{1}\), \(IGBT_{2}\) conduct, while \(L_{2}\) and \(D_{2}\) are active.
With the output port connected to the AC microgrid.
During the turn-on and turn-off periods of \(IGBT_{3}\), the current flows through the diodes of \(IGBT_{1}\) and \(IGBT_{2}\).
Case 5 addresses the scenario in which the DC microgrid requires energy to support various loads, such as an electric vehicle (EV) charging station, factory cooling systems, and agricultural food preservation units. In this case, energy is supplied from the AC microgrid to meet both the EV charging station and the broader DC grid load demands. The converter implements the principle of case 4 and adds rectifier conversion to the DC microgrid with operating diodes on the IGBT1 and IGBT2 switches, with negligible increased losses compared to case 4. The EV charging station comprises multiple subsystems, including the EV itself (acting as a variable load), energy storage units, lighting systems, climate control, and customer service facilities. Among these, the EV charging load is often prioritized, although it is non-continuous and exhibits variable power demands. The operational behavior of the DC microgrid load under different conditions is illustrated in Fig. 11, while Fig. 12 presents the EV charging station’s performance. Based on these conditions, the governing operational expression for Case 5 can be formulated as:

THD analysis of the case 4: (a) Grid voltage, (b) Grid current, (c) Converter voltage.

Graph at DC microgrid in case 5 and 6..
In this scenario, the total energy demand increases, necessitating the supplementation of power from the AC microgrid. This is feasible under the following conditions: (1) the AC microgrid is experiencing off-peak load periods, and (2) the output from renewable energy sources connected to the AC grid is relatively high-typically during periods of maximum generation throughout the day.
As illustrated in Figs. 11 and 12, the output voltage and current waveforms for both the EV and other DC loads within the DC microgrid remain stable, meeting the operational requirements of each interface. Specifically, the system maintains a voltage level of 350VDC at the DC microgrid and 1500VDC at the EV charging terminal, with sufficient power capacity to ensure reliable load operation across all connected subsystems.
Figure 13b,c,e illustrate the voltage, current, and input power characteristics of the converter connected to the AC microgrid. The system maintains stable operating values, although a phase shift between voltage and current is observed, indicating the presence of reactive power. The power transferred through the converter reaches approximately 5kW. The power received by the EV charging station and DC loads is shown in Figs. 11 and 12. Harmonic distortion analysis results are presented in Fig. 14a,b, showing the voltage and current harmonics, respectively. Figure 14c displays the total harmonic distortion (THD) across the AC grid and the converter, with a maximum value of 8.6%. Variations in EV load during this scenario are summarized in Table 1 (Fig. 15).

Graph of case 4 and 5 at EV station..

Case 4, 5, and 6 graph at AC microgrid.

THD analysis of case 5: (a) Grid voltage, (b) Grid current, (c) Converter voltage..
Case 6 involves energy transfer from the AC microgrid to supply the load demand of the DC microgrid. This scenario is analogous to the condition where the EV charging station is inactive, the energy loss on the switches is reduced according to the number of scenario 5 operations. The operational behavior is simulated in Figs. 11 and 13. The system functions based on the AC/DC conversion principle, ensuring that both input and output voltages meet the required specifications. In this configuration, the three-phase AC grid voltage is rectified to a stable DC voltage. During the conversion process, switches \(IGBT_{4}\) and diodes of the \(IGBT_{1}\), \(IGBT_{2}\) in Fig. 2a operate in coordination with the multi-level inverter (MLI), functioning in rectifier mode to reverse the direction of energy flow. While the energy exchange condition between the two microgrids is similar to that of Case 3, this case performs the conversion in the opposite direction-from AC to DC.
Figures 11 and 13 present the simulated signal results of the energy conversion process, demonstrating waveform characteristics and amplitude values that meets the frequency and voltage synchronization requirements between the AC and DC microgrids. The simulated power transferred in this case reached approximately 5kW, which is sufficient to meet the load demands of the DC microgrid. Specifically, Fig. 11c illustrates the received power at the DC side, confirming stable and efficient energy delivery. The total harmonic distortion (THD) introduced by the converter during the AC-to-DC conversion process is measured at 8.6%, as shown in Fig. 16c, which remains within acceptable limits for grid-connected power electronic systems (Fig. 17).

THD analysis of case 6: (a) Grid voltage, (b) Grid current, (c) Converter voltage.

Operation of the switching devices and current flow in Case 7: (a) Current through diode of \(IGBT_{1}\), (b) Current through diode of \(IGBT_{2}\)..
Case 7, illustrated in Fig. 18, demonstrates the bidirectional power conversion capabilities of the EV converter, supplying both DC and AC microgrid loads. The converter operates based on DC/DC and DC/AC step-down principles. Specifically, the push-pull conversion mechanism is achieved through the alternating operation of switches \(IGBT_{1}\) and \(IGBT_{2}\). In addition, switch \(IGBT_{3}\), located in the circuit connected to the transformer coil of the EV charging station, facilitates energy flow from the EV battery. When supplying power from the EV to the DC microgrid, the converter functions using a Half-Bridge configuration combined with the push-pull topology to achieve voltage step-down. For energy delivery from the EV to the AC microgrid, isolation and voltage conversion are performed using a Half-Bridge converter with a multilevel inverter (MLI) structure. In this scenario there are 12 switches operating through a three-winding pulse transformer, the converter losses corresponding to the switches working in the form of low-voltage conversion. Therefore, in this scenario, the decision for the duty cycle of the main switches IGBT3, IGBT4 will be small, leading to reduced losses during switching. The conditions defining Case 7 are established as follows: (1) The energy demand of the DC microgrid increases while the energy supplied by local sources decreases during peak load periods; (2) Similarly, the AC microgrid experiences an increase in load demand, coinciding with reduced energy availability from renewable sources during peak hours; (3) The EV is idle (not in use for driving), and its battery contains surplus energy. The mathematical expression that define the condition for Case 7 is as follows:
Figure 18 illustrates the total energy supplied from the EV to both the DC and AC microgrids, with a combined power output of approximately 6 kW. As the EV battery discharges over time, this energy output is expected to decline. Therefore, a load management strategy is required to either sequentially reduce non-essential loads based on priority or dynamically adjust energy contributions from other grid-connected sources to compensate for the reduction in EV-supplied power. The gradual decrease in EV output is reflected in the diminishing current and voltage levels. Figure 19 presents the converter’s output parameters, where the DC microgrid receives approximately 1.5 kW of power, as shown in Fig. 19c. Simultaneously, the AC microgrid receives nearly 5 kW, as depicted in Fig. 20e. The corresponding voltage and current waveforms for the AC microgrid are shown in Fig. 20b,c, which confirm stable energy transfer during this process.

Case 7 graph at EV charging station..

Case 7 graph at DC microgrid..

Case 7 graph at AC grid when receiving energy from EV..
Figure 21 presents the total harmonic distortion (THD) observed in the converter during the energy conversion process from the EV charging station to the AC microgrid, with a measured value of 7.4%. This level of harmonic distortion significantly influences the overall performance of the hybrid energy transfer process, particularly in scenarios where power is simultaneously distributed from the EV station to both AC and DC microgrids.

THD analysis of case 7: (a) Grid voltage, (b) Grid current, (c) Converter voltage..
Case 8 involves energy transfer from the EV to the AC microgrid, as illustrated in Figs. 18 and 20, utilizing a DC/AC conversion process. In this configuration, the converter performs voltage step-down according to the relationship defined in Equation (1) , similar to case 8, there is only one IGBT3 main switch operating with a small duty cycle, thus reducing the power loss for this switch and achieving higher efficiency than case 7. The \(L_2\) winding parameters in Fig. 2a represent the transformer’s primary side connected to the EV charging station, while the secondary side interfaces with the AC microgrid. As the power output exceeds 5 kW, the voltage and current waveforms vary accordingly. The total harmonic distortion (THD) of the converter in this scenario is 6.6%, as demonstrated in the simulation results in Fig. 22.

THD analysis of case 8: (a) Grid voltage, (b) Grid current, (c) Converter voltage.
Case 9 illustrates the scenario in which the EV supplies energy to the DC microgrid, as depicted in Figs. 18 and 19. The power conversion is carried out using a DC/DC converter topology, there are 5 active switches and 2 diodes of IGBT1 and IGBT2 with the requirement of reducing the output voltage. During the power conversion of the proposed converter in case 9, the losses on the switches are reduced due to the reduced duty cycle and small power components. The electrical parameters-including current, voltage, and power-at the EV charging station output are detailed in Fig. 18, while the corresponding parameters at the DC microgrid input are presented in Fig. 19, demonstrating the converter’s effectiveness in delivering stable power to the DC load.
Case 10 examines the scenario where the EV charging station is powered by surplus energy from both the DC and AC microgrids. The converter operates based on phase-controlled switching of \(IGBT_{1}\), \(IGBT_{2}\), and \(IGBT_{4}\), which regulate power transmission through coils interfacing with each microgrid , the converter performs combined power conversion between the two ports of the two microgrids in a sequential manner from DC/DC to AC/DC or vice versa, in which the total switching losses increase due to the need to increase the output voltage, increasing the duty cycle of the IGBT1, IGBT2, and IGBT4 switches as shown in Fig. 2. Figure 23 illustrates the energy transfer parameters from the AC microgrid, including three-phase current, voltage, and power signals corresponding to the distribution grid. The harmonic content of the converted voltage and current is shown in Fig. 24, with a total harmonic distortion (THD) of 10.9%. The overall THD of the converter in this configuration is 7.4%, with a power output of approximately 2.8 kW from the AC side. The combined power supplied to the EV charging station from both sources totals approximately 6.15 kW. Figures 25 and 26 present the voltage, current, and power profiles from the DC microgrid contributing to the charging process.

Case 10 graph of the converter. Current, voltage and power graph at the AC microgrid.

Harmonics of the converter.

Current, voltage and power graph of the DC microgrid when supplying EV.

Current, voltage and power graph at the receiving EV station.
Case 11 examines the scenario in which the loads on the DC microgrid are powered by surplus energy from both the AC microgrid and the EV charging station. Case 11 implements a combination of DC/DC and AC/DC conversions similar to case 10, but it implements a DC/DC conversion step-down resulting in a smaller duty cycle for the main IGBT3 and IGBT4 switches than in case 10, which results in a reduction in their losses. Figures 27, 29, and 30 illustrate the voltage, current, and power profiles at the interfaces that supply energy to the DC microgrid. The total simulated power in this case exceeds 8.1kW, with the EV station contributing a larger share of energy compared to the AC microgrid. The harmonic distortion associated with the power conversion from the AC microgrid to the DC microgrid-delivering approximately 2.6kW-is shown in Fig. 28. The total harmonic distortion (THD) of the converter under these conditions is 7.3%, indicating acceptable performance for grid-connected DC load applications (Fig. 29, 30, 31).

Case 11 graph of the converter. Current, voltage and power graph at the AC microgrid.

Harmonics of the converter.

Current, voltage and power graph of the EV station when supplying DC microgrid.

Current, voltage and power graph at the receiving DC microgrid.

Operation of the switching devices and current flow in Case 12: (a) Current through diode of \(IGBT_{1}\), (b) Current through diode of \(IGBT_{2}\).
Case 12 involves supplying the AC microgrid load using surplus energy from both the DC microgrid and the EV charging station. The proposed converter is operated in a similar combination of converter types as case 10, which has the advantage of a reduced output voltage resulting in a reduced duty cycle of the main IGBT1, IGBT2, and IGBT3 switches during energy transfer. Figures 32, 33, and 34 present the simulated current, voltage, and power waveforms, along with total harmonic distortion (THD) values at the respective converter ports during energy transfer. These results reflect the system’s ability to meet the operational requirements of the AC microgrid load under combined power input conditions. As shown in Fig. 35, the converter exhibits a total harmonic distortion of 10.3%, while the total power delivered to the AC microgrid reaches approximately 9.6kW, confirming effective energy coordination and quality in this dual-source scenario.

Case 12 graph of the converter. Current, voltage and power graph at the DC microgrid..

Current, voltage and power graph of the EV station when supplying AC microgrid..

Current, voltage and power graph at the receiving AC microgrid..

Harmonics of the converter..
Similar to the case of EV \(\rightarrow\) DC and AC, \(IGBT_{4}\) is analyzed in the same manner as \(IGBT_{3}\), and the output voltage and current parameters are calculated as follows:
where \(d_{4}\) is the duty cycle of \(IGBT_{4}\)
In the case of power transfer from the AC microgrid to the DC microgrid, the operating principle is similar to that of the EV-to-DC case. From the expression for calculating the maximum voltage across the main switches \(IGBT_{1}\)-\(IGBT_{4}\) and diodes \(D_{1}\)-\(D_{2}\), the switching device \(IGBT_{1}\) is subjected to a leakage inductance of the transformer primary windings equal to 30% of the converter input voltage, and the switches are selected accordingly as follows:
For \(IGBT_{3}\) and \(IGBT_{4}\), the ratings are determined according to expressions (30) and (35). For \(D_{1}\) and \(D_{2}\), the components are selected based on expression (10).
When load variations occur in the respective operating cases, the key circuit parameters affecting the converter’s energy conversion process exhibit fluctuations that remain within the acceptable limits outlined in Table 1. These variations are considered stable and compliant with distribution grid and microgrid performance standards. The results confirm that the proposed converter reliably supports all designated operating scenarios, effectively meeting the system’s specific functional and energy management requirements.
Controller for converter
The control system for DC and AC microgrids, along with their interconnection through converters, must adapt to varying loads at each interface. Several key challenges must be addressed to ensure stable and efficient microgrid operation: (1) Unstable and fluctuating load demand—actual energy demand is inherently variable, driven by user behavior. This leads to unpredictable and significant load fluctuations within the microgrid, particularly during peak demand periods, complicating load forecasting and management. (2) Intermittency of renewable energy sources—wind and solar energy are highly dependent on environmental conditions, resulting in unstable and time-varying power output. This intermittency introduces uncertainty in energy supply and complicates real-time balancing. (3) Asynchronous integration of multiple energy sources—the simultaneous operation of various distributed renewable sources can lead to asynchronous power generation, which negatively impacts power quality and poses protection challenges, especially during transitions between isolated and grid-connected modes or when linking AC and DC microgrids. (4) Limited energy storage capacity and low system inertia—insufficient storage and low inertia reduce the grid’s ability to buffer against fluctuations and disturbances, making stabilization more difficult. (5) Energy exchange with EVs and inter-grid power transfer—the bidirectional energy flow between EVs and microgrids, or between DC and AC microgrids via the proposed converter, can cause voltage and power oscillations. Moreover, unexpected grid faults or cybersecurity risks when interconnecting systems further complicate control and reliability. Addressing these challenges requires advanced, high-performance control strategies that ensure stable, resilient, and flexible operation of interconnected microgrids under dynamic conditions (Table 2).
The energy management, control, and system operation strategies proposed in this paper can be developed into algorithms that ensure stable, economical, and sustainable operation of microgrids-whether operating independently or interconnected with each other and electric vehicle (EV) charging stations. The control engineering aspect is responsible for implementing these strategies to manage real-world scenarios effectively, enabling reliable operation of both microgrids and EV charging infrastructure with the technical input parameters of the proposed TPEV converter as shown in Table 3. Meanwhile, the energy monitoring and management system is tasked with analyzing system variables or agents within the microgrid, as well as their interactions with other grids and EV stations, to support optimal decision-making and system performance. These strategies ensure that the proposed converter fulfills the operational requirements of the power system, as outlined in Fig. 1. To maintain energy balance across independent microgrids-particularly under varying load and source conditions-this work lays the foundation for the application of multi-agent-based methods, which will be further analyzed and discussed in the following section.
*Proposed multi-agent based distributed control strategy
Conventional power systems typically rely on a centralized (master) controller that gathers system-wide information to manage operations and make decisions. However, with the increasing penetration of distributed energy resources (DERs), power grids-particularly microgrids-have become significantly more complex and dynamic. In such environments, a centralized control strategy can present several limitations, particularly in efficiently managing diverse energy sources, variable loads, and storage systems. To address these challenges, this study proposes a distributed control approach based on a multi-agent system (MAS) as a replacement for the centralized controller. The MAS framework enables decentralized management, where individual agents make local decisions while coordinating with one another to achieve global system objectives. This architecture enhances the flexibility, scalability, and resilience of the microgrid. Beyond ensuring power quality and maintaining supply-demand balance, the agents in the MAS are also responsible for performing key functions, including battery charging and discharging management, extending battery lifespan, regulating the reference bus voltage, and mitigating voltage fluctuations. The system design incorporates several specialized agents, including distributed generation agent, energy storage agent, load agent, AC grid agent,DC grid agent, and EV charging station agent. Interconnection Agents, responsible for managing energy flow and communication between the AC microgrid, DC microgrid, and EV charging station. These agents interact and exchange information in real-time to collaboratively maintain optimal microgrid operation. The specific roles and responsibilities of each agent in the proposed system are described as follows:
The distributed generation agent operates within both the DC and AC microgrids, where it monitors voltage and current signals from renewable energy sources such as photovoltaic (PV) and wind systems. Using this real-time data, the agent performs maximum power point tracking (MPPT) to optimize energy extraction and regulate the total output power from distributed sources. Additionally, it communicates with other system agents-such as the load agent, storage agent, and grid agents-to coordinate power flow and ensure system-wide efficiency and balance.
The storage agent operates within both the DC and AC microgrids, managing battery energy storage systems. It is responsible for controlling the charging and discharging processes based on real-time data from power sources and load demands. This agent shares operational information with the generation agents, load agents, and grid agents to coordinate overall system performance. It continuously monitors the state of charge (SoC) of the battery and issues control commands to other agents as needed to maintain optimal system balance. Additionally, it plays a key role in regulating voltage stability in the DC microgrid. The terms \(P_{s-DC}\) and \(P_{s-AC}\) refer to the power supplied within the DC and AC microgrids, respectively, and their total contribution is expressed in Eq. (38), which represents the aggregate output power from all sources in the system.
where
\(P_{d}\) refers to the power demand in the microgrid system and its equation is given in Eq. (41). \(P_{d}\) is the sum of the power of the DC load (\(P_{dcload}\)) and the power of the AC load and the grid (\(P_{acload}\)).
If \(P_{s}\) > \(P_{d}\) in the microgrid, the storage is charged. If \(P_{s}\) < \(P_{d}\), the storage is discharged.
The load agent in the DC and AC microgrids, which represent the loads in the microgrids, receives information about power consumption from all the loads in the system and transmits the information to the source agents, the microgrid, and the storage. When a microgrid works independently, it can disconnect the loads in order of priority according to the power of the related agents. In addition, it plays an important role in the system by sending information about the demand balance supply to other agents.
The microgrid agent, and the grid is the agent that monitors the DC grid voltage and the voltage, phase angle, and frequency for the AC grid. This agent is responsible for informing other agents about the status information of the microgrid and the grid. It provides control over the power and current that is exported or imported from the grid. With the data it receives from other agents, the PCC is controlled to open and close. It is responsible for monitoring and negotiating power from generating units and importing or exporting power when the microgrid is in on-grid mode. It is responsible for negotiating power with other microgrid units.
EV agent is an independent unit that provides information to the DC and AC microgrid to charge and energy vehicles at recommended times for system efficiency. It controls the charging and discharging of energy. It also controls the energy information used in a day. Data information for other agents of the DC and AC microgrid.
\(P_{EV}>\) 0 provides the load.
The energy exchange between the two grids is expressed from the expression:
where \(P_{excess}\) is the surplus capacity of a grid; \(P_{dificit}\) is the shortage capacity of a grid; \(P_{excess}= P_{win}+P_{pv}+P_{b}-P_{ACload}\) in a DC or AC grid; \(P_{dificit}= total PACload - total Psources\)
The schematic diagram showing the principle of cooperation between agents in the designed multi-agent system is shown in Fig. 36 integrating the proposed converter. In addition, Table 3 provides the definition of the general coordination agents in terms of how and what tasks these agents are designed to operate flexibly and also contains the necessary messages for the interactions. The specialized agents and the combined agents have enough information about the parameters in the system to make control decisions for the TPEV converter to operate according to the requirements (12 operation cases that the TPEV converter meets as analyzed in the above section) of the specialized agents at the microgrids and EV charging stations.

Block diagram of the proposed multi-agent-based control for the microgrid.
Discuss results
The simulation results are analyzed in Figs. 37 and 39. The efficiency is analyzed and calculated from the simulation results of each case shown in Fig. 37a, corresponding to the lowest value of 94.1% corresponding to the capacity of 30 kW in case 1. In the case of combined power conversion of DC/AC and DC/DC converters, this is the case where both types of conversion are performed, so it has a large impact on the efficiency of the converter. The efficiency of the converter performing DC/DC conversion as shown in Fig. 37b shows that the efficiency of the converter is higher with the highest value of 98.5% at 4 kW and 94.5% at 30 kW, this simulation result shows the correctness of the power fluctuation during the conversion process of the proposed converter when the load increases or the required energy increases, the current during the conversion process between the ports will increase, leading to the loss on the elements will increase, leading to the efficiency will decrease correspondingly when the conversion capacity increases as shown in Figs. 8 and 9, summary table 1 with 12 cases of power fluctuation.. To see the efficiency of the converter when performing AC/DC energy conversion, the maximum efficiency of the converter is 97.7% corresponding to the capacity of 4kW as shown in Fig. 37c, and the capacity of 30kW is as shown in Fig. 37a. The average efficiency of the converter is 95.6%. Figure 37 describes the load efficiency of the two grids supplied with energy from EV with the calculated efficiency of the simulation results. Case 1 has the lowest efficiency of 94.1% Fig. 37a,b, shows Fig. 37b the efficiency results of the 2 cases when there are one utilities supplying energy to one port as shown specifically in the cases, it increases efficiency. The lowest efficiency of the converter is nearly 94.5% corresponding to the largest capacity. And the maximum efficiency of 97.6% corresponds to the smallest power. The rule is similar to other cases in the operating mode of the converter with the system. The comparison results with some references41,42 show that the performance results are better than the average performance of the proposed converter as showe Fig. 37d. In the document40 the input parameters of the converter are 220 V AC source, 50 Hz frequency, maximum conversion capacity is 15 kW, AC/DC/DC conversion type boost up to 878VDC (EV charging station head) only unidirectional and isolated, so the performance results of the proposed converter are lower than the corresponding scenario 4 as shown in Fig. 37c and lower than the average performance of the converter as shown in Fig. 37, in addition the input parameters of the proposed converter are shown in Table 4. In the document41 the input parameters of the converter are isolated power transmission type, AC/DC conversion type output voltage up to 800V, output power 8.4 kW, it is found that in the range of 6.5-8.4kW the average efficiency of the proposed converter is smaller as shown in Fig. 37d, but compared with scenario 4 in the proposed converter is larger as shown in Fig. 37c.

Performance of the proposed converter, (a) cases 1, 3, 7, 8, 12 with the DC/AC converte of the proposed converter, (b) Cases 2, 9 with the DC/DC converter, (c) Cases 4, 5, 6, 10, 11 with the AC/DC converter (d) comparison of performance results with literature.
The average efficiency of the converter is 95.6%. Figure 37 describes the load efficiency of the two grids supplied with energy from EV with the calculated efficiency of the simulation results. Case 1 has the lowest efficiency of 94.1% Fig. 37a,b, shows Fig. 37b the efficiency results of the 2 cases when there are one utilities supplying energy to one port as shown specifically in the cases, it increases efficiency. The lowest efficiency of the converter is nearly 94.5% corresponding to the largest capacity. And the maximum efficiency of 97.6% corresponds to the smallest power. The rule is similar to other cases in the operating mode of the converter with the system. The comparison results with some references41,41 show that the performance results are better than the average performance of the proposed converter as shown in Fig. 37d.
The charging efficiency of electric vehicles is described as in Fig. 38 with 3 levels corresponding to 5 cases where the EV is charged, which are cases 1, 2, 4, 5 and case 10. These specific cases have the ability to charge at 3 levels for electric vehicles according to the requirements of each car owner when charging at which level. In which, the high efficiency of 98.6% is shown in level 1 charging with small capacity, long time for the car, basically the charging process has little fluctuation in parameters. Similarly, the level 2 charging efficiency drops to the lowest 96.2%. The level 3 charging efficiency drops to almost 94 2%, this is the period of time when the converter works at low efficiency during the conversion process when charging EV. With the documents45,46 we see that the efficiency of the proposed converter has a larger value shown in Fig. 38. Reference44 with isolated DC/DC converter parameters, capacity up to 15 kW, output voltage for EV charging is 750VDC, efficiency as shown in Fig. 38 corresponding to each EV charging level of the proposed converter. Reference45 with isolated AC/DC/DC converter input parameters, required output voltage 400VDC and efficiency as shown in Fig. 38.

Performance of EV charging levels comparison with literature..
Figure 39 displays the calculated total harmonic distortion (THD) results across various energy transfer scenarios involving the DC microgrid, AC microgrid, and EV charging station, in both directions, for power levels ranging from 4kW to 30kW. The highest THD, measured at 8.5%, occurs at the second harmonic order in Case 12, where energy is simultaneously supplied from both the EV charging station and the DC microgrid to the AC microgrid load. This elevated harmonic distortion arises due to the combined operation of inverters and multiple power sources, resulting in greater interference compared to other cases. Conversely, Case 8 demonstrates the lowest average THD. Overall, the converter consistently maintains THD levels below 9% during bidirectional energy transfer, with a general trend of reduced harmonic distortion as power transfer levels increase. The simulation results are compared with the references in the above section, showing the experimental results of the converter with the input parameters shown in Table 3. Table 3 shows the technical parameters of the basic elements of the TBEV converter. Figure 37 shows the experimental results of the proposed TBEV converter. Figure 37a shows the image during the experiment with input parameter conditions in the laboratory, the microgrid is implemented through AC and DC loads, corresponding to renewable sources taken from the grids. Figure 40b shows the representative input and output voltage parameters of a load case of the AC microgrid powered by a DC microgrid, the voltage signal form meets the requirements. Figure 40c is similar according to the operating case of the AC microgrid load and EV powered by a DC microgrid source. The signal shape and response value are according to the input requirement. Figure 40d shows the experimental efficiency results in the range of above 93.5–96% with the average actual power conversion of the converter.

Total harmonic distortion comparison (a) DC/AC và DC/DC, (b) AC/DC và DC/DC.

Simulation results of multi-agent hierarchical management system of AC microgrid..
Figure 41 presents the simulation results of power flow within the DC microgrid, analogous to the previously discussed AC microgrid. Figure 41a illustrates the time-varying load demand within the DC microgrid alongside the power output from two renewable energy sources: photovoltaic (PV) and wind. The peak power demand in the DC microgrid exceeds 45 kW at around 3 s of the simulated day. At this moment, PV generation begins to decline sharply, approaching minimal output levels. In contrast, wind power exhibits fluctuations within the range of 8–20 kW, which is somewhat narrower compared to the 8–28 kW range observed in the AC microgrid scenario. Within the DC microgrid, the period of highest load demand occurs between 2 and 4 s. Figure 41b displays the state of charge (SoC) of the DC microgrid’s storage system, reflecting dynamic behavior ranging from 0 to 100%. The highest SoC levels occur between 2 and 3.5 s, during which the energy storage system discharges to meet the DC load demand. Notably, during this same period, the AC microgrid is also experiencing elevated energy demand. In contrast, during the 1–2.5 s interval, the DC microgrid’s storage unit enters a charging phase, accumulating surplus energy which can subsequently support both local DC loads and future demand from the AC microgrid.

Simulation results of the multi-agent hierarchical management system of EV charging stations..
Figure 41 illustrates the power flow dynamics of the EV charging station, following a strategy that promotes the use of stored EV energy to supply loads in the AC and DC microgrids during peak hours, while recharging EVs during off-peak periods. This approach aligns with the behavior of electric vehicles as mobile energy storage units, influenced by user schedules and awareness, ultimately enhancing energy efficiency and reducing operational costs. Consistent with the daily simulation time frame applied to both AC and DC microgrids, Fig. 41a depicts key stages of EV energy management. The peak charging power reaches up to 25 kW at time 5 s, while the minimum charging demand is approximately 5 kW at the start of the day. During the period between 3 and 4 s-corresponding to peak demand hours for both microgrids-the system encourages discharging EV-stored energy to support local loads. Furthermore, between 19:00 and 22:00 (3.8–4.3 s in simulation time), when EVs typically return home, the discharge of EV batteries is again recommended to reduce grid dependency and enhance energy savings. As shown in Fig. 41b, the state of charge (SoC) of the EV station varies significantly, ranging from 0 to 100%. This wide fluctuation highlights the EV’s role as a mobile and flexible energy source that can effectively contribute to the dynamic load demands of the AC and DC microgrids.
The simulation results are compared with the references mentioned above, demonstrating the experimental performance of the converter using the input parameters listed in Table 4. Table 4 presents the technical specifications of the basic components of the proposed TBEV converter. Figure 42 shows the experimental prototype results of the proposed TBEV converter. Figure 42a illustrates the setup during the experiment under laboratory-scale input conditions. The microgrid is implemented through AC and DC loads, representing renewable energy sources extracted from the grids. Figure 42b shows representative input and output voltage waveforms for a case in which an AC microgrid load is powered by a DC microgrid source. The voltage waveform meets the expected requirements. Figure 42c similarly demonstrates the case where both an AC microgrid load and an EV are powered by a DC microgrid source. The signal waveform and values meet the corresponding input requirements. Figure 42d presents the experimental efficiency results, ranging from 93.5 to 96%, with the average practical power conversion of the converter.

(a) Image of the converter experimental system: green frame is the converter; blue frame is the AC microgrid port; orange frame is the DC microgrid port; red frame is the EV; purple frame is the controller, (b) AC and DC microgrid port voltage measurement plot (oscilloscope), (c) EV and AC microgrid port measurement plot (oscilloscope), (d) Comparison of experimental performance with simulation of the proposed converter.
Figure 43 illustrates the power flow dynamics among key components in the AC microgrid, including (1) photovoltaic (PV) renewable energy sources, (2) battery energy storage systems (BESS), and (3) electrical loads. The simulation is divided into five representative time intervals within a 24-h period, each corresponding to specific periods of daily operation. From 0 to 1 s early morning (1:00–5:00 a.m.), from 1-2s: morning hours (6:00–11:00 a.m.), from 2-3s: midday to early afternoon (12:00–3:00 p.m.), from 3 to 4 s: evening peak (6:00–8:00 p.m.), from 4 to 5 s: night (9:00 p.m.–12:00 a.m.). In Fig. 43a, the red curve represents the output power from the PV system, peaking at 38 kW around 2.1 s (midday), and dropping to 0 kW at 5 s (night), consistent with typical solar generation patterns. The green curve reflects the load demand of the AC microgrid, showing notable variability. The load peaks at approximately 48 kW during the evening period around 3 s, with a minimum demand close to 1 kW. The blue curve indicates wind power output, which fluctuates between 8 and 28 kW throughout the day due to changing wind speeds and directions. The yellow curve shows the activity of the battery storage system, which provides a maximum output of about 19 kW to help balance supply and demand across different time intervals.

Simulation results of the multi-agent hierarchical management system of the DC microgrid..
Figure 43b illustrates the state of charge (SoC) of the AC microgrid’s storage system, which varies in response to fluctuations in generation, load demand, and storage behavior. The SoC oscillates between 0 and 100%, indicating active charging during periods of energy surplus and discharging when supply is insufficient to meet internal load demands. As shown, the storage system reaches full capacity at approximately 2.3 s. Between 2.4 and 3.8 s, the power generated by the AC microgrid falls short of the load demand, causing the SoC to decrease sharply as stored energy is discharged to compensate for the deficit. Subsequently, from 3.9 to 5 s, the storage system begins recharging, increasing the SoC to around 60% in preparation for the next cycle of energy distribution and load management. Earlier, during the interval from 1 to 2 s, the SoC also increases due to excess energy production from photovoltaic and wind sources, which surpasses the AC microgrid’s load requirement, enabling the system to store surplus energy effectively.
Energy sharing between the DC and AC microgrids and the EV charging station is illustrated in Fig. 44, which presents the state-of-charge (SoC) profile for the entire system. The simulation results demonstrate the effectiveness of the proposed multi-agent-based algorithm in enabling energy exchange between interconnected microgrids and EV stations. When one microgrid experiences a power surplus and the other faces a deficit, the control system facilitates dynamic energy reallocation. As shown in Fig. 44a, during the time interval from 3.5 to 4 s, the DC microgrid supplies energy to the AC microgrid, corresponding to operational scenarios represented by Cases 1, 2, 3, and 11. Between 4 and 4.5 s, power flows from the AC grid to the DC microgrid, aligned with Cases 4, 5, 6, and 10. From 13:00 to 17:00, energy is provided by EVs to both AC and DC loads, reflecting Cases 7, 8, 9, and 12 under the proposed flexible converter configuration. The variation in renewable energy generation (e.g., PV and wind) and fluctuating load demand enables real-time energy transfers between microgrids and EVs, enhancing the overall efficiency of the power system while promoting balanced energy distribution. Figure 44b further illustrates the SoC dynamics of battery storage systems across the microgrids and EVs. These results emphasize the critical role of energy storage in stabilizing grid operations. By charging during periods of excess generation and discharging when deficits occur, the system ensures localized energy autonomy and supports load prioritization without requiring external grid intervention.

System SoC during energy exchange between grids and EVs..
Conclusion
This study presents the integration of DC and AC dual-microgrid systems with electric vehicle (EV) charging stations. A key feature of the system is the incorporation of distributed energy resources (DERs), such as photovoltaic (PV) and wind energy, along with energy storage systems, all coordinated through a multi-agent-based control framework. The operating principles of the proposed system are thoroughly discussed, highlighting the role of a flexible bidirectional converter capable of handling 12 distinct operational scenarios. These scenarios reflect various modes of system functionality and demonstrate enhanced efficiency in renewable energy utilization from both the microgrids and EVs. The system is modeled and simulated using MATLAB/Simulink, with the multi-agent controller overseeing energy management, decentralizing internal grid operations, enabling grid interconnection, and coordinating EV energy contributions. The proposed control scheme effectively facilitates coordination between DC and AC microgrids, managing distributed energy sources such as solar PV, battery energy storage systems (BESS), and grid power. The main conclusions drawn from the study are as follows:
-
1.
The multi-agent controller ensures that the bus voltage remains within acceptable limits despite fluctuations in load demand and the intermittent nature of renewable energy sources. It effectively manages bidirectional voltage supply between the DC and AC microgrids and the EV charging station.
-
2.
The controller enables continuous bidirectional operation among the three ports of the proposed converter. It is designed to optimize energy usage from the main grid, maintain power quality, prioritize critical loads, and ensure the overall safety and stability of the system.
-
3.
The system demonstrates reliable and intelligent real-time control and monitoring capabilities, effectively minimizing operational errors.
-
4.
The proposed converter demonstrates flexible operation in accordance with real-world power system conditions, maintaining system stability within approximately 0.0015 s during both load increase and decrease scenarios.
-
5.
The converter achieves an overall efficiency of 94.5%, which is considered acceptable for systems with diverse operational capabilities.
-
6.
The total harmonic distortion (THD) of the converter remains within the permissible limit, reaching 8.6% during the intermediate stages of the DC/AC and AC/DC energy conversion processes.
-
7.
The proposed system is applicable to bidirectional EV charging stations, contributing to reduced electricity costs for vehicle owners while enhancing energy security at the regional and local levels.
-
8.
The proposed inverter supports both DC and AC charging modes for electric vehicles, offering flexible and efficient charging options.
-
9.
The system enhances the personalization of energy usage and management strategies for both electric vehicle owners and microgrid operators, allowing tailored control based on individual preferences, operational priorities, and local energy conditions.
Data availability
The data declared for figures and tables in the article are archived in the link file: https://doi.org/10.6084/m9.figshare.29464961
References
Singh, M., Yuksel, T., Michalek, J. & Azevedo, I. Ensuring greenhouse gas reductions from electric vehicles compared to hybrid gasoline vehicles requires a cleaner US electricity grid. Sci. Rep. https://doi.org/10.1038/s41598-024-51697-1 (2024).
Holland, S., Mansur, E., Muller, N. & Yates, A. Are there environmental benefits from driving electric vehicles? The importance of local factors. Am. Econ. Rev. 106, 3700–3729. https://doi.org/10.1257/aer.20150897 (2016).
Ercan, T. et al. Autonomous electric vehicles can reduce carbon emissions and air pollution in cities. Transport. Res. Part D Transport Environ. 112, 103472. https://doi.org/10.1016/j.trd.2022.103472 (2022).
International Energy Agency. Global EV Outlook 2022. https://www.iea.org/reports/global-ev-outlook-2022 (2022). IEA, Paris. Licence: CC BY 4.0.
Jiang, D., Huo, L., Zhang, P. & Lv, Z. Energy-efficient heterogeneous networking for electric vehicles networks in smart future cities. IEEE Trans. Intell. Transport. Syst. 22, 1868–1880. https://doi.org/10.1109/TITS.2020.3029015 (2021).
Pevec, D. et al. A survey-based assessment of how existing and potential electric vehicle owners perceive range anxiety. J. Cleaner Product. 276, 122779. https://doi.org/10.1016/j.jclepro.2020.122779 (2020).
Denholm, P. & Short, W. Evaluation of utility system impacts and benefits of optimally dispatched plug-in hybrid electric vehicles (revised). Contract https://doi.org/10.2172/888683 (2006).
Dhaifullah, M. et al. An efficient short-term energy management system for a microgrid with renewable power generation and electric vehicles. Neural Comput. Appl. https://doi.org/10.1007/s00521-021-06247-5 (2021).
Li, C., Zhang, L., Zihan, O., Zhou, D. & Jiayu, M. Robust model of electric vehicle charging station location considering renewable energy and storage equipment. Energy 238, 121713. https://doi.org/10.1016/j.energy.2021.121713 (2021).
Shen, L., Cheng, Q., Cheng, Y., Wei, L. & Wang, Y. Hierarchical control of dc micro-grid for photovoltaic ev charging station based on flywheel and battery energy storage system. Electric Power Syst. Res. 179, 106079. https://doi.org/10.1016/j.epsr.2019.106079 (2020).
Azam, M. K., Nema, S. & Gautam, S. K. Grid connected charging station for electric vehicle based on various renewable energy system. In 2022 IEEE 6th International Conference on Condition Assessment Techniques in Electrical Systems (CATCON), 389–392. https://doi.org/10.1109/CATCON56237.2022.10077675 (2022).
Ansari, M. K. A. & Nema, S. Direct power control scheme with voltage modulation control technique for a weak grid connected voltage source converters through band pass filter. In 2021 IEEE 2nd International Conference On Electrical Power and Energy Systems (ICEPES), 1–5, https://doi.org/10.1109/ICEPES52894.2021.9699482 (2021).
Atawi, I., Hendawi, E. & Zaid, S. Analysis and design of a standalone electric vehicle charging station supplied by photovoltaic energy. Processes 9, 1246. https://doi.org/10.3390/pr9071246 (2021).
Chandra Mouli, G. R., Schijffelen, J., Heuvel, M., Kardolus, M. & Bauer, P. A 10kw solar-powered bidirectional ev charger compatible with chademo and combo. IEEE Trans. Power Electron. https://doi.org/10.1109/TPEL.2018.2829211 (2018).
Yilmaz, M. & Krein, P. Review of battery charger topologies, charging power levels, and infrastructure for plug-in electric and hybrid vehicles. Power Electron. IEEE Trans. 28, 2151–2169. https://doi.org/10.1109/TPEL.2012.2212917 (2013).
Chandra, A., Gaur, P. & Tomar, A. Fuzzy logic-enhanced ev battery charging station: Integration of solar pv, sepic and buck converter with mppt based cc-cv charging. In Proceedings of the 2023 International Conference on Renewable Energy and Smart Grid (IRESG), 1–6. https://doi.org/10.1109/IICPE60303.2023.10474730 (2023).
Mumtaz Noreen, M. T., Fouladfar, M. H. & Saeed, N. Evaluation of battery management systems for electric vehicles using traditional and modern estimation methods. Network. 4, 586–608. https://doi.org/10.3390/network4040029 (2024).
Mastoi, M. S. et al. A study of charging-dispatch strategies and vehicle-to-grid technologies for electric vehicles in distribution networks. Energy Rep. 9, 1777–1806. https://doi.org/10.1016/j.egyr.2022.12.139 (2023).
Elkholy, M. et al. Techno-economic configuration of a hybrid backup system within a microgrid considering vehicle-to-grid technology: A case study of a remote area. Energy Conversion Manag. 301, 118032. https://doi.org/10.1016/j.enconman.2023.118032 (2024).
Moncecchi, M., Rancilio, G., Dimovski, A. & Bovera, F. Smart charging algorithm for flexibility provision with electric vehicle fleets. In Proceedings of the 2021 IEEE International Conference on Power Engineering and Systems, 1–8, https://doi.org/10.1109/CPE-POWERENG50821.2021.9501081 (2021).
Theodorakopoulos, L., Theodoropoulou, A. & Stamatiou, Y. A state-of-the-art review in big data management engineering: Real-life case studies, challenges, and future research directions. Eng 5, 1266–1297. https://doi.org/10.3390/eng5030068 (2024).
Mojumder, M., Antara, F. A., Hasanuzzaman, T. D. M., Alamri, B. & Alsharef, M. Electric vehicle-to-grid (v2g) technologies: Impact on the power grid and battery. Sustainability 14, 13856. https://doi.org/10.3390/su142113856 (2022).
Kester, J., Noel, L., Zarazua de Rubens, G. & Sovacool, B. K. Promoting vehicle to grid (v2g) in the nordic region. Expert advice on policy mechanisms for accelerated diffusion. Energy Policy. 116, 422–432. https://doi.org/10.1016/j.enpol.2018.02.024 (2018).
Kempton, W. & Letendre, S. E. Electric vehicles as a new power source for electric utilities. Transport. Res. Part D Transport Environ. 2, 157–175. https://doi.org/10.1016/S1361-9209(97)00001-1 (1997).
Chakir, A., Abid, M., Tabaa, M. & Hachimi, H. Demand-side management strategy in a smart home using electric vehicle and hybrid renewable energy system. Energy Rep. 8, 383–393. https://doi.org/10.1016/j.egyr.2022.07.018 (2022).
Adams, S. & Nsiah, C. Reducing carbon dioxide emissions; does renewable energy matter?. Sci. Total Environ. 693, 133288. https://doi.org/10.1016/j.scitotenv.2019.07.094 (2019).
Seitter, K. L. Weather as fuel—The wicked problem of renewable energy. Bull. Am. Meteorol. Society 105, E2231–E2241. https://doi.org/10.1175/BAMS-D-23-0289.1 (2024).
Carvela, M., Mena, I. F., Lobato, J. & Rodrigo, M. A. Using solar power regulation to electrochemically capture carbon dioxide: Process integration and case studies. Energy Rep. 8, 4957–4963. https://doi.org/10.1016/j.egyr.2022.03.198 (2022).
Bashir, M. Principle parameters and environmental impacts that affect the performance of wind turbine: An overview. Arab. J. Sci. Eng. https://doi.org/10.1007/s13369-021-06357-1 (2021).
Malmgren, I. Quantifying the societal benefits of electric vehicles. World Electr. Vehicle J. 8, 986–997. https://doi.org/10.3390/wevj8040996 (2016).
Yamaura, K., Xu, S., Sugiyama, M. & Ju, Y. Public perceptions on net zero energy houses in Japan. Sustain. Sci. 20, 373–384. https://doi.org/10.1007/s11625-024-01501-w (2024).
Vinh, N. & Dung, N. Bidirectional ac/ac converter linking two microgrids in a flexible microgrid. International Journal of Power Electronics and Drive Systems (IJPEDS) 16, 389, https://doi.org/10.11591/ijpeds.v16.i1.pp389-406 (2025).
Vinh, N. Bidirectional converter connecting the energy storage system to the dc and ac grid. Int. Energy J. 23, 141–154 (2023).
Suresh, K. et al. Design and implementation of a universal converter for microgrid applications using approximate dynamic programming and artificial neural networks. Sci. Rep. https://doi.org/10.1038/s41598-024-71916-z (2024).
General Statistics Office of Vietnam. Statistical yearbook of 2022. https://www.gso.gov.vn/en/data-and-statistics/2023/06/statistical-yearbook-2022/ (2023). Accessed via“Data and Statistics”section.
Forrest, K., Mac Kinnon, M., Tarroja, B. & Samuelsen, S. Estimating the technical feasibility of fuel cell and battery electric vehicles for the medium and heavy duty sectors in california. Appl. Energy 276, 115439. https://doi.org/10.1016/j.apenergy.2020.115439 (2020).
Zhou, T., Roorda, M., Maclean, H. & Luk, J. Life cycle ghg emissions and lifetime costs of medium-duty diesel and battery electric trucks in Toronto, Canada. Transport. Res. Part D Transport Environ. 55, 91–98. https://doi.org/10.1016/j.trd.2017.06.019 (2017).
https://www.iec.ch/homepage.
Zhu, B. et al. Ac voltage synthesis using arbitrary two-phase voltages: Frequency, phase, and amplitude modulation for direct ac–ac power conversion. IEEE Trans. Power Electron. 37, 11855–11864. https://doi.org/10.1109/TPEL.2022.3176398 (2022).
Seghyar, O. et al. A 15kw level 3 inductive power transfer charger for fast charging and maximum efficiency. Results Eng. 24, 102868. https://doi.org/10.1016/j.rineng.2024.102868 (2024).
Geda, M. G., Kim, S. & Choi, S. High-efficiency reconfigurable single-stage bidirectional ac/dc converter for 50 kw fast charger. IEEE Access 12, 133584–133594. https://doi.org/10.1109/ACCESS.2024.3460766 (2024).
Jatoth, R. et al. Design and analysis of a high-efficiency bi-directional dab converter for ev charging. Sci. Rep. https://doi.org/10.1038/s41598-024-71982-3 (2024).
Singh, A. et al. A high-efficiency poly-input boost dc-dc converter for energy storage and electric vehicle applications. Sci. Rep. https://doi.org/10.1038/s41598-024-69254-1 (2024).
Kuo, S.-H. et al. High efficiency dual-active-bridge converter with triple-phase-shift control for battery charger of electric vehicles. Energies. https://doi.org/10.3390/en17020354 (2024).
Rajendran, G., Naidu, K., Vaithlingam, A. & Oruganti, K. Energy-efficient converters for electric vehicle charging stations. Sustain. Energy Technol. Assessments 38, 100670. https://doi.org/10.1016/j.seta.2020.100670 (2020).
Funding
Automation and Robotics Laboratory-ARL Lab, Posts and Telecommunications Institute of Technology, Hanoi, Vietnam
Author information
Authors and Affiliations
Contributions
N.T.V. conceived the experiment(s), V.T.N. implemented the simulation, N.V.D. and N.T.V. conducted the experiment(s), N.T.V. and H.S.V. analyzed the results. All authors review the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Vinh, N.T., Nguyen, VT., Van Dung, N. et al. New flexible bidirectional converter for electric vehicle substations connecting microgrids. Sci Rep 15, 35391 (2025). https://doi.org/10.1038/s41598-025-19277-z
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-19277-z
