
Abstract
Path planning for Unmanned Surface Vehicles (USVs) amid ocean currents and obstacles remains a challenging problem that has attracted considerable attention. However, existing methods fail to provide robust temporal prediction capabilities and do not effectively leverage the synergy between physics-based and learning-based approaches. To address these limitations, this paper presents a novel artificial-potential-field-guided deep Q-network (APF-DQN) with Transformer-based ocean current prediction for USV path planning in complex marine environments. First, a multi-scale Transformer architecture is employed for high-precision ocean current field prediction. Subsequently, an enhanced adaptive APF is proposed, incorporating a dynamic current-induced force field and an entropy-driven local minima escape mechanism. Furthermore, a median-Q-value-based exploration mechanism is introduced to improve the exploration efficiency of the standard \(\epsilon\)-greedy strategy. Finally, through state-space augmentation, an APF-informed loss function, and policy fusion, a multi-level integration framework combining APF and DQN is established. Comparative simulation results confirm that the proposed framework achieves a 100% path success rate, 14.7% shorter trajectories, and 37.7% lower energy consumption compared to baseline methods.
Similar content being viewed by others

Introduction
Unmanned Surface Vehicles (USVs) have emerged as versatile and cost-effective platforms for a wide range of marine applications, including oceanographic monitoring, environmental surveying, and maritime logistics1,2,3. However, the complex and dynamic nature of marine environments, characterized by time-varying ocean currents and densely distributed obstacles, poses significant challenges for autonomous USV navigation.
Intelligent path planning, as a critical enabling technology for USV operations, fundamentally determines mission efficiency, energy consumption, and operational safety. In practice, USVs encounter unique challenges: complex and time-varying ocean current dynamics, stringent obstacle avoidance requirements, and the need to balance multiple competing objectives such as energy efficiency and operational safety4,5,6,7. These challenges surpass the capabilities of conventional planning methods, necessitating the development of advanced algorithmic approaches.
Conventional path planning methods are generally classified into global and local approaches. Global algorithms, such as the A* algorithm8, Dijkstra’s algorithm9, and Rapidly-exploring Random Trees (RRT)10,11, generate optimal or near-optimal paths in static environments. However, these algorithms rely heavily on predefined environmental models, which limits their effectiveness in complex ocean current conditions. Furthermore, their computational complexity scales poorly with environment size, hindering real-time implementation. These methods also lack adaptability to ocean current variations, leading to significant deviations between planned and actual trajectories. Despite extensive research efforts to incorporate constraints and multi-objective optimization frameworks12,13, fundamental limitations persist when operating in highly dynamic marine environments.
In contrast to global approaches, local planning methods, such as the Artificial Potential Field (APF) method14, enable real-time navigation by utilizing virtual force fields that integrate target attraction with obstacle repulsion. Despite being computationally efficient and responsive, APF methods face two major limitations: susceptibility to local minima in obstacle-dense environments15 and limited adaptability to dynamic conditions16. Various enhancements have been proposed to address these challenges. For instance, Ge et al.17 introduced virtual obstacle configurations to escape local minima, while Li et al.18 integrated APF with the A* algorithm to improve global optimality under relatively simple environmental conditions. Nevertheless, these modifications have not adequately addressed the inherent limitations in complex dynamic environments19.
Given the inherent limitations of traditional approaches, Deep Reinforcement Learning (DRL) methods have garnered considerable research attention. DRL offers a promising alternative by learning control policies through trial-and-error interactions without requiring precise environmental models. This characteristic makes DRL particularly suitable for addressing the uncertainties inherent in marine environments, such as time-varying currents and unpredictable obstacles. Among various DRL techniques, the Deep Q-Network (DQN)20,21 has attracted significant attention due to its capacity for nonlinear function approximation in high-dimensional state spaces. DQN has demonstrated effectiveness in underwater vehicle path planning under current interference22, suggesting its potential for USV applications. However, applying DQN to USV path planning presents several challenges, including sample inefficiency, high computational complexity, and constrained action space discretization23.
In response to these challenges, hybrid frameworks that integrate DQN with traditional methodologies have been developed to leverage the strengths of both approaches while mitigating their respective limitations. For instance, Shen et al.22 demonstrated the potential of such integration by combining DQN with APF through reward function optimization. However, this approach focuses primarily on reward-level integration and does not effectively harness deeper synergies between the two methods, such as state-space augmentation or policy-level fusion.
Despite these advancements, four fundamental limitations persist in current USV navigation approaches:
-
Existing environmental models typically rely solely on real-time sensor data, lacking predictive capabilities for future ocean current states24. This limitation constrains proactive path planning for evolving current patterns, compromising both efficiency and safety of USV navigation in dynamic tidal zones.
-
Traditional APF methods, while computationally efficient, suffer from susceptibility to local minima and limited adaptability to dynamic ocean currents. Existing enhancements have not adequately addressed these issues in complex marine environments where current patterns vary significantly over time19.
-
Conventional DRL methods, particularly those employing \(\epsilon\)-greedy exploration strategies, exhibit inefficient exploration-exploitation trade-offs that lead to slow convergence and suboptimal policy learning25. These inefficiencies are exacerbated in high-dimensional marine navigation scenarios.
-
Current hybrid frameworks (e.g.,22) achieve only reward-level integration of APF and DQN, failing to exploit deeper synergies such as state-space augmentation and policy fusion. This shallow integration results in underutilization of physics-based prior knowledge and reduced system stability in dynamic marine environments.
To systematically address these limitations, this study proposes a hybrid path planning framework that integrates an enhanced APF with DQN. The framework introduces four key innovations:
-
A multi-scale Transformer architecture is proposed for ocean current prediction, incorporating an adaptive spatio-temporal attention mechanism and physics-informed constraints to achieve high-precision current field forecasting.
-
An enhanced adaptive APF (E-APF) is developed by introducing a dynamic current-induced force field and an entropy-driven local minima escape mechanism, thereby improving adaptability and robustness in dynamic marine environments.
-
A median-Q-value-based exploration mechanism is introduced to address the inefficient exploration-exploitation trade-off of conventional \(\epsilon\)-greedy strategies, accelerating convergence during the learning process.
-
A multi-level integration framework combining APF and DQN is established through state-space augmentation, an APF-informed loss function, and policy fusion, enhancing both path planning efficiency and environmental adaptability.
Comparison to related work
To position the proposed APF-DQN framework within the existing literature, this section presents a systematic comparison with related studies across four key dimensions: reinforcement learning for path planning, Transformer-based prediction methods, physics-data hybrid approaches, and navigation in dynamic flow fields. Table 1 summarizes the key methodological differences.
Reinforcement learning for path planning
Deep reinforcement learning has emerged as a promising paradigm for sequential decision-making in dynamic environments. Cao et al.26 applied DQN to dynamic job shop scheduling with Automated Guided Vehicles, demonstrating DQN’s effectiveness in handling discrete state spaces and operational constraints. Xu et al.27 proposed a spatial memory-augmented visual navigation framework using hierarchical deep RL, where explicit memory structures record visited locations to enhance exploration efficiency. Shen et al.22 pioneered the integration of APF with DQN for AUV path planning, incorporating APF-derived terms into the reward signal to guide learning. Chen et al.28 addressed the entrapment problem for planetary rovers using Bayesian optimization to find optimal escape action sequences through black-box parameter search. In contrast, APF-DQN achieves multi-level integration through three mechanisms: state-space augmentation with potential field features, an APF-informed loss function for gradient-level guidance, and adaptive policy fusion. The entropy-based escape mechanism in E-APF provides a principled approach to local minima detection, differing from the black-box optimization paradigm.
Transformer-based prediction for navigation
The application of Transformer architectures to sequential prediction has demonstrated remarkable success across domains. Chen et al.29 developed an interaction-aware trajectory prediction framework using Transformer with transfer learning for autonomous driving, predicting future trajectories of surrounding vehicles to enable safe motion planning. Jiang et al.30 proposed DST2former for traffic flow prediction, utilizing dynamic spatio-temporal attention mechanisms to capture complex dependencies in graph-structured transportation networks. Li et al.31 applied channel and temporal attention networks for remaining useful life prediction of stratospheric airships, demonstrating the versatility of attention mechanisms in capturing temporal dependencies from multi-sensor data. Unlike these approaches that target discrete agents or health states, APF-DQN predicts continuous ocean current velocity fields. The multi-scale Transformer architecture incorporates physics-informed constraints (mass and vorticity conservation) specific to fluid dynamics, ensuring physically plausible predictions that respect fundamental conservation laws.
Physics-data hybrid methods
The integration of physics-based models with data-driven learning has gained significant attention for improving model interpretability and generalization. Zhang et al.32 proposed a hybrid framework combining neural networks with physics-based estimators for vehicle longitudinal dynamics modeling, where physics models provide structural priors while neural networks learn residual errors. Wang et al.33 introduced a twisted Gaussian risk model that encodes vehicle motion states into risk fields for trajectory planning, representing a field-based approach conceptually similar to APF. Liu et al.34 addressed robust navigation in urban environments through multipath inflation factors for GNSS/IMU/VO fusion, dynamically adjusting measurement confidence based on environmental uncertainty. APF-DQN extends this physics-data philosophy to both prediction and planning: the Transformer incorporates physical conservation laws as soft constraints, while E-APF provides physics-based navigation guidance with adaptive weighting that dynamically adjusts field contributions based on local environmental conditions.
Navigation in dynamic flow fields
Path planning in time-varying flow fields presents unique challenges that distinguish marine and aerial navigation from ground-based robotics. Lolla et al.35 and Subramani et al.36 established foundational work on energy-optimal path planning in ocean currents, employing level-set methods and stochastic optimization, respectively. These approaches provide globally optimal solutions but require complete knowledge of the flow field and substantial computational resources. Liu et al.37 addressed dynamic control of stratospheric airships in time-varying wind fields for communication coverage missions using model predictive control with explicit wind field models. Wang et al.38 studied UAV trajectory optimization in maritime networks coexisting with satellite systems, addressing trajectory optimization for communication objectives rather than navigation efficiency. Tang et al.39 investigated submesoscale kinetic energy patterns induced by tropical cyclones, revealing the multi-scale and non-stationary nature of real ocean dynamics that motivates the use of multi-scale prediction architectures. APF-DQN trades global optimality for real-time adaptability, learning policies that generalize across different flow configurations without requiring complete environmental knowledge.
The comparison reveals that while individual components of the proposed framework (Transformer prediction, APF guidance, DQN learning) have been explored separately in various domains, the systematic multi-level integration—combining physics-constrained prediction, enhanced potential field guidance, and adaptive policy fusion—represents a novel contribution to USV path planning in dynamic ocean environments.
Problem statement
This section presents the theoretical foundation for the proposed path planning framework. The framework requires accurate modeling of both the vehicle and its operating environment, as well as a suitable interface for learning-based control. First, a three-degree-of-freedom (3-DOF) USV dynamics model is introduced to characterize vessel motion under propulsion and external disturbances. Subsequently, a time-varying ocean current model based on potential flow theory is formulated to capture the spatiotemporal dynamics of the marine environment. Finally, to bridge continuous physical dynamics with discrete decision-making, a structured action space is designed for deep reinforcement learning implementation.
USV dynamics model
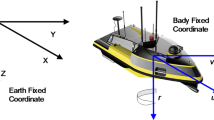
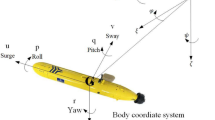
The planar motion of the USV is modeled using a 3-DOF framework that captures surge, sway, and yaw dynamics40,41,42. Although the motion is constrained to the horizontal plane, the equations are formulated in both the Earth-fixed frame \(\{O\text {-}x_o y_o\}\) and the body-fixed frame \(\{B\text {-}x_b y_b\}\), as illustrated in Fig. 1. This simplified rigid-body model retains essential motion characteristics while reducing computational complexity by neglecting higher-order hydrodynamic effects—an assumption valid for low-speed operations43,44.

Coordinate systems for USV modeling: the earth-fixed frame \(\{O\text {-}x_o y_o\}\) and the body-fixed frame \(\{B\text {-}x_b y_b\}\).
The kinematic and dynamic equations governing USV motion are derived using the Newton-Euler formulation:
where \(\eta = [x, y, \psi ]^\top\) denotes the position and heading vector in the Earth-fixed frame, \(\nu = [u, v, r]^\top\) represents the velocity vector in the body-fixed frame, M is the mass-inertia matrix, \(C(\nu )\) is the Coriolis-centripetal matrix, \(D(\nu )\) is the hydrodynamic damping matrix, \(\tau\) is the control force vector from the propulsion system, and \(\tau _{c}\) is the disturbance force vector induced by ocean currents.
The mass-inertia matrix M comprises the rigid-body inertia \(M_{RB}\) and the added mass \(M_{A}\):
where m is the USV mass, \(I_z\) is the moment of inertia about the vertical axis, and \(X_{\dot{u}}\), \(Y_{\dot{v}}\), \(Y_{\dot{r}}\), \(N_{\dot{v}}\), \(N_{\dot{r}}\) are added mass coefficients representing the additional inertia due to the surrounding fluid.
The Coriolis-centripetal matrix \(C(\nu )\) and the rotation matrix \(R(\psi )\) are given by:
The hydrodynamic damping matrix \(D(\nu )\) consists of linear and nonlinear components:
The linear damping \(D_l\) dominates at low speeds, while the nonlinear damping \(D_n(\nu )\) becomes significant during high-speed maneuvers:
The current-induced disturbance force \(\tau _c\) is modeled based on the relative velocity between the USV and the ambient flow:
where \(\nu _c\) denotes the ocean current velocity vector, which is characterized in the following subsection.
Ocean current model
Having established the USV dynamics, this subsection characterizes the ocean current field that constitutes the primary environmental disturbance. A two-dimensional, depth-averaged, time-varying current field model based on potential flow theory is adopted, following the formulations of Lolla et al.35 and Subramani et al.36. This model is particularly suitable for simulating nearshore current dynamics, playing a critical role in USV navigation.
The current field is described by a stream function defined in the Earth-fixed frame:
where A denotes the peak current velocity amplitude. The spatiotemporal modulation function f(x, t) is given by:
with time-varying coefficients:
Here, \(\omega\) is the angular frequency corresponding to the tidal period \(T = 2\pi /\omega\), and \(\mu\) governs the vortex spatial distribution. The constraint \(|\mu \sin (\omega t)| < 1/2\) is imposed to ensure flow regularity.
Remark 1
The constraint \(|\mu \sin (\omega t)| < 1/2\) guarantees that the function f(x, t) remains monotonic in x for \(x \in [0,1]\), thereby preventing the formation of stagnation points and ensuring a well-defined velocity field throughout the domain. This condition is essential for maintaining numerical stability in path planning simulations.
By varying the parameter \(\mu\), the model generates different flow configurations, ranging from single-vortex to dual-vortex systems, as illustrated in Fig. 2.

Ocean current configurations: (a) single-vortex system with clockwise rotation; (b) dual-vortex system with counter-rotating vortices. Streamlines indicate flow direction, and color intensity corresponds to current speed (m/s).
The velocity field is obtained from the stream function through the standard relationship for incompressible two-dimensional flow:
where \(\nu _c = [u_c, v_c]^\top\)represents the current velocity vector in the Earth-fixed frame. This formulation has been validated against experimental observations35 and effectively captures the essential features of nearshore tidal currents for USV path planning applications.
USV action space
Unlike traditional USV control systems that employ continuous input signals, a discrete action space is adopted in this study to facilitate deep reinforcement learning and to reduce computational complexity24. As illustrated in Fig. 3, the action space \(\mathcal {A}\) comprises eight permissible motion directions—four cardinal (N, E, S, W) and four intercardinal (NE, SE, SW, NW)—uniformly distributed at \(45^\circ\) intervals:
where \(\theta _i\) denotes the heading angle of action \(a_i\) measured from the positive x-axis in the Earth-fixed frame. The propulsion velocity magnitude is assumed constant across all actions.

Schematic illustration of the discrete action space. Arrows indicate the eight permissible motion directions in the horizontal plane, uniformly distributed at \(45^\circ\) intervals.
The resultant velocity of the USV in the Earth-fixed frame is obtained by combining the propulsion velocity with the ambient current:
where \(\nu _b\) is the propulsion velocity in the body-fixed frame, \(\nu _c\) is the ocean current velocity defined in Eq. (10), and \(R(\psi )\) is the rotation matrix introduced in Equation (1).
The discrete action space formulation offers two key advantages for reinforcement learning. First, it reduces the action space dimensionality from continuous to finite, enabling efficient exploration and accelerating policy convergence. Second, it aligns naturally with value-based methods such as DQN, where Q-values are computed for each discrete action. This formulation is particularly well-suited for dynamic marine environments that demand rapid decision-making.
Method
Building upon the theoretical foundation established in the previous section, this section details the proposed APF-DQN framework for USV path planning in dynamic ocean environments. The framework integrates physics-based guidance from an Enhanced Artificial Potential Field (E-APF) with the learning capability of Deep Q-Networks (DQN), achieving synergy between domain knowledge and data-driven optimization.
The methodology is organized into three main modules encompassing six key components: (1) a multi-dimensional state space representation encoding both local and global environmental information; (2) a multi-scale Transformer architecture for ocean current prediction; (3) an Enhanced APF method incorporating current-induced forces and entropy-based escape mechanisms; (4) a hierarchical reward function balancing task completion, path efficiency, and environmental adaptation; (5) a median Q-value based exploration strategy to improve learning efficiency; and (6) a multi-level integration framework that fuses APF guidance with DQN through state augmentation, loss function design, and policy fusion. These components work synergistically: the Transformer provides predictive environmental awareness, the E-APF offers physics-based navigation guidance, and the DQN learns adaptive policies that leverage both sources of information. The overall architecture is illustrated in Fig. 4.

Overall architecture of the proposed APF-DQN framework. The system comprises three main modules: (1) the Transformer-based ocean current predictor that forecasts local flow fields (Section “Multi-Scale Transformer Model for Ocean Current Prediction”); (2) the Enhanced APF module that computes physics-based navigation guidance (Section “Enhanced Artificial Potential Field”); and (3) the DQN module that learns optimal policies through state representation, reward shaping, exploration optimization, and policy fusion (Sections “State Space Representation”, “Reward Function”, “Deep Q-Network with Median-Based Exploration”, and “APF-Guided Deep Q-Network Integration”). Arrows indicate information flow between components.
State space representation
To enable effective path planning in complex and dynamic marine environments, a multi-dimensional state space framework is proposed that integrates spatial, environmental, and temporal information. The state space \(\mathcal {S}\) is defined as:
where the components are organized into three functional categories as detailed below.
Navigation Reference: This category encodes the USV’s kinematic state relative to the mission objective:
-
\(\textbf{p}_c, \textbf{p}_g \in [-1,1]^2\): the normalized current and goal positions in the Earth-fixed frame.
-
\(\dot{\textbf{p}}_c \in \mathbb {R}^2\): the instantaneous velocity of the USV in Cartesian coordinates.
Remark 2
Position coordinates are normalized to the range \([-1, 1]\) using:
where W and H denote the global map dimensions. This normalization ensures numerical stability and consistent scaling across different operational scenarios.
Environmental Perception: This category provides spatial awareness of obstacles and ocean currents:
-
\(\textbf{M}_g \in \{0,1\}^{W \times H}\): the global obstacle map, where 1 indicates an obstacle cell and 0 indicates free space.
-
\(\textbf{V}_l \in \{0,1\}^{n \times n}\): the local obstacle observation extracted from \(\textbf{M}_g\) as an \(n \times n\) window centered at \(\textbf{p}_c\):
$$\begin{aligned} \textbf{V}_l = \textbf{M}_g\left[ x_c - \frac{n-1}{2} : x_c + \frac{n-1}{2},\; y_c - \frac{n-1}{2} : y_c + \frac{n-1}{2} \right] . \end{aligned}$$ -
\(\textbf{V}_f \in \mathbb {R}^{2 \times n \times n}\): the predicted ocean current velocity field within the local observation window, with two channels corresponding to the x- and y-velocity components. This field is obtained through the ocean current prediction model described in the following subsection.
Temporal Context: A historical buffer \(\mathcal {H}_t\) maintains temporal information essential for ocean current prediction:
where:
-
\(\textbf{p}_{t-T:t}\): the position trajectory over the past T time steps.
-
\(\textbf{a}_{t-T:t}\): the action sequence over the past T time steps.
-
\(\nu _{c,t-T:t}\): the observed ocean current velocity history, enabling temporal pattern recognition for flow prediction.
Table 2 summarizes the state space parameters, determined through preliminary experiments to balance computational efficiency and perceptual coverage.
Multi-scale transformer model for ocean current prediction
The ocean current field exhibits significant spatiotemporal variability, posing challenges for USV path planning. Traditional sensing equipment, such as Acoustic Doppler Current Profilers, provides only single-point instantaneous velocity measurements45, limiting the USV’s ability to perceive the surrounding flow distribution. To address this limitation, a multi-scale Transformer architecture that incorporates physical constraints is proposed for ocean current prediction. This model integrates hierarchical attention mechanisms with fundamental conservation principles, enabling high-resolution local flow field forecasting.
Architecture overview
The prediction model follows an encoder-decoder structure. The global encoder processes the complete ocean current field to extract macroscopic flow patterns, while the local decoder generates high-resolution predictions within a neighborhood of the USV’s current position. The global ocean current field \(\textbf{V}_\text {global} \in \mathbb {R}^{2 \times W \times H}\), generated by the potential flow model defined in the Problem Statement section, serves as the primary input.
The global Transformer encoder extracts flow features as:
where \(\mathcal {H}_t\) denotes the historical observation buffer and \(\textbf{F}_\text {global} \in \mathbb {R}^{d}\) is the resulting global feature vector of dimension d.
The local decoder predicts the ocean current velocity field \(\textbf{V}_f\) conditioned on the global features and the USV’s current position:
where n specifies the local prediction window size.
Feature representation
Multi-scale features are constructed through concatenation:
where \(\nu _c(t)\) denotes the ocean current velocity at time t, \(\textbf{V}_{\text {local},t}\) represents historical local observations, \(\sigma (\cdot )\) computes velocity statistics (mean and variance), and \(\textbf{PE}_\text {spatial}\) and \(\textbf{TE}\) are spatial and temporal positional encodings, respectively.
Spatiotemporal attention mechanism
A spatiotemporally aware attention mechanism integrates content similarity with spatial-temporal proximity:
where \(d_{ts} = |t - s|\) denotes the temporal distance, \(\Vert \textbf{p}_t - \textbf{p}_s\Vert\) denotes the spatial distance, and \(\lambda ^{(i)}_1\), \(\lambda ^{(i)}_2\) are learnable parameters controlling the influence of temporal and spatial proximity in attention head i.
Physics-informed loss function
The loss function incorporates four physically motivated constraints to ensure prediction validity:
where \(\hat{\textbf{V}}_f\) denotes the predicted velocity field, \(\textbf{V}_\text {local}\) denotes the ground truth, \(\nabla \cdot\) and \(\nabla \times\) represent the divergence and curl operators, \(\varvec{\omega }\) is the observed vorticity, and \(\mathcal {L}_\text {KL}\) is the Kullback-Leibler divergence.
Physical Constraint Implementation. The physical constraints are enforced through soft penalty terms rather than hard architectural constraints, offering three advantages: (1) flexibility to accommodate measurement noise and model uncertainties; (2) end-to-end differentiability for gradient-based optimization; and (3) tunable trade-offs between prediction accuracy and physical consistency.
The hyperparameters are determined through grid search on a validation set:
-
Mass conservation (\(\lambda _1 = 0.1\)): Enforces \(\nabla \cdot \textbf{V} \approx 0\) for incompressible flow.
-
Vorticity conservation (\(\lambda _2 = 0.1\)): Maintains consistency with observed rotational flow patterns.
-
Temporal continuity (\(\lambda _3 = 0.05\)): Ensures smooth temporal evolution via L1 regularization.
-
Statistical consistency (\(\lambda _4 = 0.01\)): Aligns local predictions with global flow statistics.
The effectiveness of these constraints is validated through ablation experiments in Section “Ablation Study on Transformer Physical Constraints”.
The complete prediction procedure is summarized in Algorithm 1.

Multi-scale transformer-based ocean current prediction.
The predicted ocean current field \(\textbf{V}_f\) serves as a critical input for both the state representation and the force field computation. The following subsection describes how this information is incorporated into an Enhanced Artificial Potential Field method.
Enhanced artificial potential field
Traditional Artificial Potential Field (APF) methods are susceptible to local minima and exhibit limited adaptability to dynamic environments. To address these limitations, an Enhanced APF (E-APF) is proposed that incorporates three key mechanisms: adaptive force weighting, ocean current integration, and entropy-based escape from local minima.
Composite force field
The total force acting on the USV is computed as a weighted combination of three components:
where \(\textbf{F}_{\text {att}}\), \(\textbf{F}_{\text {rep}}\), and \(\textbf{F}_{\text {flow}}\) denote the attractive, repulsive, and current-induced force components, respectively.
The attractive force directs the USV toward the goal:
where \(k_{\text {att}}\) is the attraction gain coefficient, \(\textbf{p}_g\) is the goal position, and \(\textbf{p}_c\) is the current USV position.
The repulsive force prevents collisions with obstacles:
where \(\textbf{p}_{\text {obs}}^i\) denotes the position of the i-th obstacle, \(k_{\text {rep}}\) is the repulsion gain, and \(\hat{\textbf{n}}_i = (\textbf{p}_c - \textbf{p}_{\text {obs}}^i) / \Vert \textbf{p}_c - \textbf{p}_{\text {obs}}^i\Vert\) is the unit vector pointing from the obstacle to the USV. The effective repulsion range \(d_{\text {eff}}\) is adaptively reduced as the USV approaches the goal:
where \(d_0\) is the maximum repulsion range and \(\lambda\) is a scaling factor. This adaptation prevents excessive repulsion from interfering with the approach to the goal.
The current-induced force incorporates ocean current effects:
where \(k_f\) is the flow gain coefficient and \(\nu _c(\textbf{p}_c)\) denotes the ocean current velocity at the USV’s position.
Adaptive weight adjustment
The force weights are dynamically adjusted based on environmental conditions:
where \(d_{\text {min}}\) denotes the distance to the nearest obstacle, \(N_{\text {near}}\) denotes the number of obstacles within a sensing radius, \(\alpha\) and \(\beta\) are sensitivity parameters, and Z is a normalization factor ensuring \(w_{\text {att}} + w_{\text {rep}} + w_{\text {flow}} = 1\).
Temporal smoothing
To suppress trajectory oscillations caused by rapid force variations, temporal smoothing is applied:
where \(\eta \in (0,1)\) is the smoothing coefficient that blends the current force with the previous timestep’s force.
Probabilistic action selection
Rather than directly following the force vector, E-APF employs probabilistic action selection using a temperature-scaled softmax function. For each candidate action \(\textbf{a}_i\) in the discrete action space, a score is computed:
where \(\theta _{Fi}\) denotes the angle between action \(\textbf{a}_i\) and the smoothed force \(\textbf{F}_t\), \(d_{\text {proj},i}\) denotes the projected distance to the goal along action \(\textbf{a}_i\), and \(\omega _1\), \(\omega _2\) are weighting factors.
The action probability is then computed as:
where the temperature \(T = T_0 e^{-t/\tau }\) decreases exponentially over time, with initial temperature \(T_0\) and decay constant \(\tau\). This annealing schedule transitions from exploration (high T) to exploitation (low T).
Entropy-based escape mechanism
Local minima occur when attractive and repulsive forces approximately cancel, leaving no clear preferred direction. This situation manifests as high entropy in the action probability distribution. The entropy is computed as:
When \(H(\mathcal {A}) > H_{\text {threshold}}\), indicating potential entrapment, the algorithm temporarily selects random actions from a safe action set \(\mathcal {A}_{\text {safe}}\)(actions that do not lead to immediate collision) to escape the local minimum.
The complete E-APF procedure is summarized in Algorithm 2.

Enhanced artificial potential field path planning.
While E-APF provides physics-based navigation guidance, the DQN component requires a carefully designed reward function to learn effective policies. The following subsection presents the hierarchical reward framework.
Reward function
The reward function is a critical component that directly shapes the learned navigation policy. A hierarchical reward framework is proposed, comprising four modules: task completion, path efficiency, environmental adaptation, and exploration. The total reward at each time step is:
where \(w_i\) denotes the weight for the i-th reward component.
Task completion reward
The task-oriented reward provides sparse signals for goal achievement and collision avoidance:
where \(R_{\text {goal}}\) denotes the goal achievement reward, \(R_{\text {collision}}\) denotes the collision penalty, and \(\epsilon\) is the goal proximity threshold.
Path efficiency reward
Dense rewards encourage progress toward the goal and trajectory smoothness:
where \(d_t = \Vert \textbf{p}_c - \textbf{p}_g\Vert\) denotes the distance to the goal at time t, \(\theta _t\) denotes the heading angle, and \(\dot{\textbf{p}}_t\) denotes the USV velocity. The distance reduction reward \(r_{\text {dist}}\) encourages goal approach, while \(r_{\text {smooth}}\) penalizes abrupt heading and velocity changes.
Environmental adaptation reward
This module encourages current utilization and obstacle avoidance:
where \(\theta _{\text {ac}}\) denotes the angle between the USV heading and the current direction, \(\nu _c\) denotes the ocean current velocity, \(DT(\textbf{p}_c)\) denotes the distance transform value at the current position (larger values indicate greater distance from obstacles), and \(d_{\text {safe}}\) is a safety distance parameter. The current alignment reward \(r_{\text {curr}}\) encourages energy-efficient navigation by utilizing favorable currents, while \(r_{\text {safe}}\) rewards maintaining safe distances from obstacles.
Exploration and energy reward
This module balances exploration incentives with energy consumption penalties:
where \(\mathcal {T}\) denotes the set of previously visited positions, \(\mathbb {I}(\cdot )\) denotes the indicator function, \(\Phi _{\text {exp}}\) denotes the exploration potential field encoding spatial coverage information, and \(\Vert \dot{\textbf{p}}_t - \nu _c\Vert\) represents the relative velocity magnitude (proportional to propulsion effort). The first term of \(r_{\text {exp}}\) rewards visiting new areas, while the second term encourages movement toward regions with lower exploration potential gradients. The energy penalty \(r_{\text {energy}}\) discourages excessive propulsion effort.
Table 3 summarizes the reward weights and parameter values.
With the reward function defined, the next subsection presents the enhanced DQN architecture that learns navigation policies through interaction with the environment.
Deep Q-network with median-based exploration
This study adopts an enhanced Deep Q-Network (DQN) architecture to improve decision-making capabilities in complex marine environments. The proposed algorithm incorporates four key mechanisms: Dueling network structure, prioritized experience replay, adaptive soft update, and a novel median Q-value based exploration strategy.
Dueling network architecture
The Dueling DQN decomposes the state-action value function Q(s, a) into state value and action advantage components46:
where V(s) represents the state value function and A(s, a) denotes the action advantage function. This decomposition enables independent learning of state values and action advantages, resulting in more accurate and robust value estimation.
Prioritized experience replay
To enhance sample efficiency, prioritized experience replay47 is employed. For each transition \((s_t, a_t, r_t, s_{t+1})\), the sampling probability is determined by the TD error:
where the TD error is computed as:
\(\alpha\) controls the degree of prioritization, and \(\varepsilon\) is a small constant ensuring non-zero sampling probabilities.
Importance sampling weights correct for the bias introduced by non-uniform sampling:
where N denotes the replay buffer size and \(\beta\) gradually increases from an initial value to 1 during training, progressively correcting the sampling bias.
The network is optimized using a weighted TD loss:
Adaptive soft update
The target network update rate is dynamically adjusted based on learning progress48:
where \(\overline{|\delta |}\) denotes the mean absolute TD error of the current batch. The target network parameters are updated as:
This adaptive mechanism increases the update rate when TD errors are large (indicating significant learning potential) and decreases it when errors are small (prioritizing stability).
Median Q-value based exploration
The standard \(\epsilon\)-greedy strategy selects random actions uniformly from the entire action space:
Although simple, this approach wastes exploration resources on clearly suboptimal actions.
To address this limitation, a median Q-value based exploration mechanism is proposed:
where \(\mathcal {A}_{\text {mid}}\) contains actions with Q-values in the interquartile range:
Here, \(Q_{25\%}(s_t)\) and \(Q_{75\%}(s_t)\) denote the 25th and 75th percentiles of Q-values across all actions in state \(s_t\).
Theoretical Motivation. The median-Q exploration strategy is motivated by three observations specific to USV path planning:
-
1.
Structured Q-value Distribution: In the 8-direction discrete action space, Q-values exhibit characteristic patterns. High-Q actions (top 25%) correspond to goal-directed movements aligned with favorable currents, which are already exploited during greedy selection. Low-Q actions (bottom 25%) represent clearly suboptimal choices where exploration provides minimal learning value.
-
2.
Information Gain Efficiency: Medium-Q actions (25%–75%) represent the region of highest uncertainty where exploration yields maximum information gain. Standard \(\epsilon\)-greedy allocates exploration uniformly, including low-Q actions unlikely to improve policy quality. Median-Q exploration redirects samples to actions with higher potential for value refinement.
-
3.
Accelerated Convergence: By excluding extreme Q-values from exploration, the strategy maintains meaningful exploration of promising alternatives while avoiding detrimental actions, as demonstrated in Section “Analysis of the Effectiveness of the Median-based Exploration Strategy”.
Potential Bias Mitigation. Three mechanisms address the theoretical concern that median-Q exploration may bias against initially underestimated optimal actions:
-
Q-value Dynamics: Underestimated optimal actions receive positive TD updates when selected via the greedy component (\(1-\epsilon\) probability), gradually moving into the explorable range.
-
APF Guidance: The E-APF component provides physics-based action preferences independent of Q-values, offering an alternative pathway for discovering optimal actions through the policy fusion mechanism.
-
Reward Structure: The hierarchical reward function ensures that beneficial actions (goal-directed, current-aligned, obstacle-avoiding) quickly accumulate positive returns, preventing them from remaining in the bottom 25% for extended periods.
APF-guided deep Q-network integration
Having introduced the E-APF method and the enhanced DQN algorithm separately, this subsection describes how these components are integrated into a unified framework. A multi-level integration approach is established through three complementary mechanisms: state space augmentation, APF-guided loss function, and policy fusion.
State space augmentation
The state representation is augmented with potential field information to enhance environmental awareness:
where \(\textbf{F}_{\text {total}}\) denotes the total force vector computed by E-APF at the current position, and \(\nabla \textbf{F}_{\text {total}}\) denotes its spatial gradient. This augmentation provides the DQN with explicit information about the force field topology, enabling physics-informed policy learning.
APF-guided loss function
The Q-network training is regularized to align with E-APF guidance through a composite loss function:
where \(\mathcal {L}_{\text {DQN}}\) denotes the standard TD loss, \(\textbf{q}(s) = [Q(s,a_1), \ldots , Q(s,a_{|\mathcal {A}|})]^\top\) denotes the Q-value vector across all actions. This term encourages the Q-value landscape to reflect the structure of the potential field, with higher Q-values for actions aligned with the E-APF force direction.
Design Rationale. The \(L_2\) norm is chosen for its convexity and differentiability, which provide stable gradient signals that encourage the learned Q-value distribution to align with the physics-based potential field direction. This formulation effectively embeds physical prior knowledge into the reinforcement learning process, accelerating early convergence.
Hyperparameter Selection. The scaling factor \(\alpha = 0.1\) was determined empirically to align the magnitude of force vectors (\(|\textbf{F}_{\text {total}}| \approx 1\)–10) with Q-value estimates (\(|Q| \approx 100\)–400). The regularization weight \(\lambda _{\text {APF}} = 0.01\) was selected to balance early-stage physics guidance with later-stage reward-driven learning, ensuring that the APF term provides meaningful guidance without dominating the TD loss.
Policy fusion
The final action distribution is obtained by blending DQN and E-APF policies:
where \(P_{\text {DQN}}(a_i) = \text {softmax}(Q(s,a_i)/T_Q)\) is derived from Q-values, and \(P_{\text {E-APF}}(a_i) = \text {softmax}(S(a_i)/T_F)\) is derived from E-APF action scores defined in the E-APF subsection. The temperatures \(T_Q\) and \(T_F\) control the sharpness of each distribution.
The fusion weight \(w_{\text {APF}}\) adapts based on training progress and policy confidence:
where t denotes the current training step, \(T_{\text {decay}}\) denotes the decay horizon, \(\text {Var}(\textbf{q}(s))\) denotes the variance of Q-values across actions (indicating confidence), and \(\sigma _w\) is a sensitivity parameter.
Design Rationale. The adaptive weight schedule incorporates two complementary principles:
-
1.
Temporal Decay: The term \(\max (0, 1-t/T_{\text {decay}})\) ensures that E-APF guidance dominates during early training when Q-estimates are unreliable, then gradually transfers control to the learned DQN policy as training progresses.
-
2.
Confidence-Based Adjustment: The term \(\exp (-\text {Var}(\textbf{q})/\sigma _w)\) reduces APF influence when Q-value variance is high (indicating confident action preferences) and increases it when variance is low (indicating uncertainty). This allows the DQN to override APF guidance in states where it has learned reliable value estimates.
The effectiveness of this integration is validated in Section “APF-DQN Integration Framework”, where APF-DQN achieves 31.4% faster convergence compared to standalone DQN (\(42.67 \pm 1.37\) vs. \(62.25 \pm 1.14\) episodes, \(p < 0.001\)).
The complete APF-guided DQN algorithm is summarized in Algorithm 3.
Experiments
This section presents a comprehensive experimental evaluation of the proposed APF-DQN framework. The experimental setup is first described, including the simulation environment, comparative algorithms, evaluation metrics, and reproducibility measures. The main experimental results are then presented, followed by ablation studies that analyze the contribution of individual components. Finally, the robustness and generalization capability of APF-DQN are evaluated, and its limitations are discussed.

APF-guided deep Q-network algorithm.
Experimental setup
Simulation environment
A \(40 \times 40\) two-dimensional grid environment is constructed to simulate realistic marine navigation conditions for USV path planning. The simulation framework comprises three core components:
-
Obstacle Configuration: The environment contains multiple rectangular obstacles and a central circular obstacle, collectively occupying 25% of the total area. This configuration mimics common navigational hazards encountered in maritime operations.
-
Ocean Current Field: A dual-vortex current system is generated through the superposition of two counter-rotating vortex fields, producing a dynamic and irregular flow regime with peak velocities reaching 5.0 m/s.
-
Navigation Task: The USV is required to navigate from the starting position at coordinates (35, 2) to the goal position at (5, 35) within a maximum of 200 decision steps.
Figure 5 illustrates the simulation environment, highlighting the obstacle layout and ocean current patterns. All comparative experiments are conducted under identical environmental configurations and initial conditions to ensure fair evaluation.

Simulation environment for USV path planning. Black regions represent fixed obstacles, colored arrows indicate ocean current intensity and direction, the blue dot marks the starting position, and the green star denotes the goal position. The red dashed line shows a typical path generated by the traditional APF method, while the cyan solid line represents the path produced by the proposed APF-DQN method.
Comparative algorithms
To systematically assess the contributions of different components in APF-DQN, the proposed method is compared with the following path planning algorithms:
-
T-APF: The traditional Artificial Potential Field method serves as the baseline approach. This method operates without considering ocean current effects.
-
E-APF: This enhanced APF method incorporates ocean current influences through dynamically weighted potential fields, as described in the Method section.
-
DQN: This standard DQN implementation shares identical network architecture and reward mechanisms with APF-DQN, enabling direct comparison of the integration framework’s contribution.
-
DQN-EG: This DQN variant employs the conventional \(\epsilon\)-greedy exploration strategy instead of the proposed median-based exploration, isolating the effect of the exploration mechanism.
-
APF-DQN-NOC: This variant of APF-DQN excludes ocean current consideration, isolating the impact of environmental dynamics on path planning performance.
Table 4 summarizes the key parameters for these methods. All parameters are tuned based on preliminary experiments and existing literature to ensure fair comparison.
Evaluation metrics
A comprehensive set of metrics is designed to evaluate algorithm performance across three aspects: safety and efficiency, energy consumption, and learning performance.
Safety and efficiency metrics
The following metrics assess the safety and efficiency of path planning:
-
Success Rate: The proportion of episodes in which the USV successfully reaches the goal, reflecting overall task completion capability.
-
Path Length: The total distance traveled by the USV, measuring path optimization performance.
-
Decision Steps: The number of actions required to complete the navigation task, indicating decision-making efficiency.
-
Convergence Speed: The number of training episodes required for policy stabilization. Convergence is defined as achieving stable rewards above a predefined threshold for 10 consecutive episodes.
Energy consumption metrics
The USV’s energy consumption is modeled as the sum of three components:
-
1.
Basic Movement Energy: \(E_{\text {base}} = k_{\text {base}} \cdot d\), where \(k_{\text {base}}\) is the unit energy cost per distance and d is the traveled distance.
-
2.
Turning Energy: \(E_{\text {turn}} = k_{\text {turn}} \cdot \min (\Delta \theta , 2\pi - \Delta \theta )\), where \(k_{\text {turn}}\) is the turning energy coefficient and \(\Delta \theta\) is the heading change.
-
3.
Ocean Current Effect: \(E_{\text {current}} = -k_{\text {current}} \cdot \cos \alpha \cdot \Vert \textbf{v}_c\Vert \cdot d\), where \(k_{\text {current}}\) is the current interaction coefficient, \(\alpha\) is the angle between the USV heading and the current direction, and \(\textbf{v}_c\) is the current velocity. This term is negative when the USV moves with the current (energy saving) and positive when moving against it (additional consumption).
Learning performance metrics
Learning performance is evaluated using two metrics:
-
Training Reward: The cumulative reward obtained during training episodes, reflecting learning progress and policy improvement.
-
Testing Reward: The reward achieved by the trained policy in held-out test scenarios, measuring generalization capability.
Reproducibility and statistical analysis
All reinforcement learning experiments are implemented in Python using the PyTorch framework. The complete training and evaluation code is provided as supplementary material to enable exact replication of the reported results.
Computational resources
All experiments are conducted on a workstation equipped with an AMD Ryzen 9 7945HX CPU and an NVIDIA GeForce RTX 4060 GPU, running Ubuntu 20.04.6 LTS with Python 3.9 and PyTorch 1.12. Training a single APF-DQN model for 1000 episodes requires approximately 2 hours, while pre-training the Transformer-based ocean current predictor for 500 epochs requires approximately 3 hours. The total computational time for all experiments, including 12 independent runs per algorithm and sensitivity analyses, is approximately 100 GPU-hours.
Experimental protocol
To ensure reproducibility, the random seeds of Python, NumPy, and PyTorch are fixed. Each algorithm is trained over 12 independent runs using different random seeds (0–11), with each run consisting of 1000 episodes and a maximum of 200 decision steps per episode. Training curves represent the mean across all runs, with shaded regions indicating \(\pm 1\) standard deviation.
For performance evaluation, each trained model is tested over 20 independent episodes under identical environmental configurations. The values reported in subsequent tables represent sample means ± standard deviation computed across all test episodes from all runs.
Statistical testing
To assess the statistical significance of performance differences, paired Wilcoxon signed-rank tests are employed between APF-DQN and each baseline method. For each algorithm pair, tests are conducted on per-run metrics including convergence episode, average reward, path length, and decision steps. A significance level of \(\alpha = 0.05\) is adopted throughout. Table 5 summarizes the statistical test results.
All pairwise comparisons yield statistically significant results (\(p < 0.05\)), confirming that the performance improvements of APF-DQN are not attributable to random variation. The W-statistic of 0.000 indicates that APF-DQN outperformed the baseline method in all 12 independent runs for the corresponding metric, demonstrating completely consistent superiority.
With the experimental framework established, the main results are presented below. An overall comparison across all methods is first provided to establish the performance landscape, followed by analysis of the contributions of individual components through targeted comparisons.
Main experimental results
Overall performance comparison
To provide a comprehensive evaluation, APF-DQN is compared with five representative path planning approaches: T-APF, E-APF, DQN, DQN-EG, and APF-DQN-NOC. Table 6 summarizes the test performance across all methods.
The results reveal several key observations:
-
Safety Performance: All DQN-based methods and E-APF achieve 100% success rate in the standard test configuration (25% obstacle density, current intensity 1.0), indicating reliable task completion. T-APF achieves 95.0% success rate due to occasional local minima entrapment, while E-APF achieves 100% success through the entropy-based escape mechanism.
-
Navigation Efficiency: APF-DQN demonstrates superior efficiency compared to all other methods, achieving the shortest path length (262.85 m) and fewest decision steps (41.30). Compared to the ablated variant APF-DQN-NOC, APF-DQN reduces path length by 15.8% and decision steps by 25.7%. Compared to DQN-EG, APF-DQN reduces path length by 14.7% and decision steps by 12.2%. Notably, APF-DQN also outperforms the deterministic E-APF baseline, achieving 2.7% shorter path length (262.85 m vs. 270.09 m) and 12.1% fewer decision steps (41.30 vs. 47.00), demonstrating that the learning-based approach can surpass carefully tuned heuristic methods.
-
Energy Utilization: APF-DQN achieves the lowest energy consumption (49.55 units) among all methods. Compared to DQN-based baselines, this represents a 34.8% reduction vs. DQN (76.04), 19.8% vs. DQN-EG (61.81), and 37.7% vs. APF-DQN-NOC (79.53). APF-DQN also slightly outperforms the deterministic E-APF (53.67 units) by 7.7%, demonstrating that the learned policy effectively exploits ocean currents for energy-efficient navigation.
Overall, APF-DQN achieves the best balance between navigation efficiency and energy consumption while maintaining 100% success rate. The following subsections provide detailed analysis of each component’s contribution.
Training efficiency analysis
The overall comparison establishes APF-DQN’s competitive test performance. Training efficiency is now examined through pairwise comparisons with ablated variants, demonstrating the practical advantages of the proposed framework.
APF-DQN integration framework
APF-DQN integrates E-APF with DQN to enhance training efficiency. Table 7 compares the training performance of APF-DQN and standard DQN.
The results demonstrate significant training improvements:
-
Success Rate: APF-DQN achieves a training success rate of \(98.17 \pm 1.80\)%, compared to \(94.00 \pm 1.80\)% for DQN, representing a 4.4% relative improvement. This enhancement is attributed to the physics-informed guidance from E-APF, which helps avoid local minima during exploration.
-
Convergence Speed: APF-DQN achieves stability at \(42.67 \pm 1.37\) episodes, compared to \(62.25 \pm 1.14\) episodes for DQN, resulting in a 31.4% improvement in training efficiency (\(p < 0.001\)).
-
Average Reward: APF-DQN attains an average reward of \(359.16 \pm 2.52\), representing a 46.5% increase over DQN’s \(245.14 \pm 1.72\) (\(p < 0.001\)).
In the testing phase (Table 6), APF-DQN outperforms DQN with 10.8% shorter path length (262.85 m vs. 294.69 m), 18.8% fewer decision steps (41.30 vs. 50.85), and 34.8% lower energy consumption (49.55 vs. 76.04). This demonstrates that the physics-informed guidance contributes to a more effective policy. The most significant advantage of APF-DQN lies in its substantially faster convergence during training, which is critical for practical deployment scenarios where training efficiency is a primary concern.
Figure 6 visualizes the training dynamics and trajectory comparison between DQN and APF-DQN.

Performance comparison between DQN and APF-DQN (averaged over 12 independent runs): (a) average training reward curve; (b) success rate curve; (c) comparison of planned trajectories during testing. The background color indicates ocean current intensity, and arrows indicate ocean current direction.
The performance improvements stem from the multi-level integration of E-APF with DQN. At the state level, APF-derived features provide the agent with physics-based environmental awareness. At the loss level, the APF-informed loss function guides gradient updates toward physically plausible policies. At the policy level, adaptive fusion dynamically balances APF guidance and learned Q-values based on state uncertainty. This hierarchical integration enables the agent to leverage domain knowledge during early training while progressively relying on learned policies as experience accumulates, resulting in faster convergence and more efficient navigation.
Impact of ocean current consideration
To evaluate the impact of incorporating ocean current information, APF-DQN is compared with APF-DQN-NOC. Table 8 presents the training performance comparison.
The results demonstrate the critical importance of ocean current consideration:
-
Convergence Speed: APF-DQN converges approximately 5.5 times faster than APF-DQN-NOC (\(42.67 \pm 1.37\) episodes vs. \(234.42 \pm 1.31\) episodes, \(p < 0.001\)). This dramatic improvement indicates that ocean current information significantly accelerates policy learning.
-
Average Reward: The average training reward increases from \(95.73 \pm 0.71\) to \(359.16 \pm 2.52\) (\(p < 0.001\)), representing a 275% improvement. This demonstrates that current-aware policies achieve substantially higher cumulative rewards.
-
Success Rate: The training success rate improves from \(96.50 \pm 1.73\)% to \(98.17 \pm 1.80\)% (\(p = 0.013\)), a 1.7% relative improvement, indicating more reliable task completion.
In the testing phase (Table 6), APF-DQN outperforms APF-DQN-NOC with 15.8% shorter path length (262.85 m vs. 312.35 m), 25.7% fewer decision steps (41.30 vs. 55.55), and 37.7% lower energy consumption (49.55 vs. 79.53).
Figure 7 visualizes the performance difference between APF-DQN and APF-DQN-NOC.

Performance comparison between APF-DQN and APF-DQN-NOC (averaged over 12 independent runs): (a) average training reward; (b) training success rate; (c) trajectory comparison during testing. The background color indicates ocean current intensity, and arrows indicate current direction.
The performance improvements can be attributed to the effective integration of ocean current information into both the state space and reward function. By incorporating current velocity predictions, the agent can anticipate flow dynamics and plan energy-efficient trajectories that exploit favorable currents while avoiding headwinds. This proactive approach reduces unnecessary propulsion effort and enables more direct paths to the goal.
Effectiveness of median-based exploration strategy
Having established the benefits of the APF-DQN integration framework and ocean current consideration, the contribution of the median-based exploration (ME) strategy is now analyzed by comparing APF-DQN with DQN-EG.
Table 9 demonstrates the superior training performance of APF-DQN:
-
Success Rate: APF-DQN achieves a training success rate of \(98.17 \pm 1.80\)%, compared to \(96.20 \pm 1.80\)% for DQN-EG, representing a 2.0% relative improvement.
-
Convergence Speed: APF-DQN achieves stability after \(42.67 \pm 1.37\) episodes, representing a 36.0% improvement over DQN-EG’s \(66.67 \pm 3.23\) episodes (\(p < 0.001\)).
-
Average Reward: APF-DQN achieves significantly higher average training reward (\(359.16 \pm 2.52\) vs. \(341.22 \pm 2.38\)), a 5.3% improvement (\(p < 0.001\)).
During the testing phase (Table 6), APF-DQN exhibits significant practical advantages over DQN-EG: 14.7% shorter path length (262.85 m vs. 307.91 m), 12.2% fewer decision steps (41.30 vs. 47.05), and 19.8% lower energy consumption (49.55 vs. 61.81).
Figure 8 visualizes the training dynamics and trajectory comparison.

Performance comparison between APF-DQN and DQN-EG (averaged over 12 independent runs): (a) average training reward curve; (b) success rate curve; (c) comparison of planned trajectories in the testing phase. The background color represents ocean current intensity, and arrows indicate ocean current direction.
Empirical Validation of Theoretical Motivation. The experimental results provide strong empirical support for the theoretical motivation of median-Q exploration:
-
Information Gain Efficiency: The 36.0% faster convergence confirms that focusing exploration on medium-Q actions yields higher information gain per sample compared to uniform exploration across all actions.
-
No Evidence of Optimal Action Bias: The superior final performance (14.7% shorter paths, 19.8% lower energy) indicates that the median-Q strategy does not systematically miss optimal actions.
-
Consistent Improvement: The statistically significant improvements across all key metrics (\(p < 0.001\)) suggest that the Q-value dynamics successfully promote initially underestimated actions into the explorable range as training progresses.
Ablation studies
The main results demonstrate APF-DQN’s superior performance across multiple metrics. To provide deeper insights into the contribution of each component, systematic ablation studies are conducted on both the Transformer predictor and the E-APF module.
Physical constraints in transformer predictor
To evaluate the contribution of physical constraints in the Transformer-based ocean current predictor, ablation experiments are conducted comparing prediction accuracy and downstream path planning performance under different constraint configurations. Table 10 presents the results.
The ablation results demonstrate the importance of each physical constraint:
Prediction accuracy
-
Physical constraints significantly improve prediction accuracy: The full constraint model achieves 53% lower prediction MSE compared to the unconstrained baseline (0.0398 vs. 0.0847).
-
Mass conservation is the most critical constraint: Adding mass conservation alone reduces divergence error by 71% (from 0.312 to 0.089), enforcing the incompressibility assumption of ocean currents.
-
Vorticity conservation captures rotational dynamics: Adding vorticity conservation further reduces prediction error by 18%, improving the model’s ability to represent rotational flow patterns.
Path planning performance
-
Progressive improvement in success rate: Path success rate improves progressively from 85% (no constraints) to 92.5% (mass), 95% (mass + vorticity), 97.5% (mass + vorticity + statistical), and 100% (full constraints).
-
Reduced path length and variance: The full constraint model achieves the shortest path length (262.85 m) with the lowest variance (\(\pm 4.18\) m), compared to \(298.42 \pm 24.31\) m for the unconstrained baseline—a 12% reduction in path length and 83% reduction in variance.
-
Cumulative benefits: Each additional constraint provides incremental improvements, with the full constraint configuration achieving optimal performance across all metrics.
These results validate the soft constraint formulation, demonstrating that penalty-based physical constraints effectively guide the Transformer to produce physically plausible predictions that improve downstream path planning performance.
Components in enhanced APF
To systematically evaluate the contribution of each component in the Enhanced Artificial Potential Field (E-APF), ablation experiments are conducted by progressively adding components to the traditional APF baseline. Table 11 presents the results.
The ablation results reveal several key findings:
-
Ocean current force (\(\textbf{F}_{\text {flow}}\)) is critical: Adding the current-induced force field alone (APF + Flow) improves success rate from 95% to 100% and reduces path length by 25% (from 348.2 m to 261.0 m), demonstrating that incorporating ocean current information is essential for efficient navigation in dynamic marine environments.
-
Adaptive weights alone cause failure: The APF + Adaptive variant achieves 0% success rate despite covering 335.2 m—longer than the successful E-APF path (270.1 m). Without current awareness, the adaptive weight adjustment leads to inefficient navigation with excessive detours, exhausting the maximum step limit (200) before reaching the goal.
-
Entropy escape provides partial improvement: APF + Entropy achieves 90% success rate but with significantly longer paths (412.6 m vs. 270.1 m) and high variance (\(\pm 104.6\) m), suggesting that the entropy-driven escape mechanism helps avoid local minima but produces inefficient paths without current awareness.
-
Full E-APF achieves robust performance: The complete E-APF combines all components synergistically, achieving 100% success rate with efficient path length (270.1 m) and lowest energy consumption (53.7). While APF + Flow achieves slightly shorter paths (261.0 m), E-APF provides more robust behavior through the adaptive weighting and entropy escape mechanisms, which become critical in more challenging scenarios.
Robustness and generalization
Beyond the standard test configuration, APF-DQN’s robustness under varying environmental conditions and its generalization capability to unseen scenarios are evaluated. This analysis is critical for assessing the practical applicability of the proposed framework.
Sensitivity to environmental parameters
Ocean current intensity
To evaluate the robustness of APF-DQN under varying ocean current conditions, the algorithm is tested across four current intensity levels (0.3, 0.6, 1.0, 1.5). Table 12 presents the comparative results.
The sensitivity analysis reveals several important findings:
-
Robustness across all conditions: APF-DQN maintains 100% success rate across all current intensity levels, demonstrating superior robustness compared to both E-APF and DQN.
-
DQN fails under weak currents: DQN achieves only 50% success rate under weak current conditions (intensity = 0.3), as the learned policy is trained on intensity = 1.0 and struggles to generalize to out-of-distribution conditions. In contrast, APF-DQN maintains perfect performance due to the physics-based APF guidance providing essential stability during distribution shifts.
-
E-APF degrades at extreme conditions: E-APF shows reduced success rates at both weak (90%) and strong (95%) current intensities. Under weak currents, insufficient flow information leads to local minima entrapment; under strong currents, the deterministic policy cannot adapt to the increased environmental dynamics.
-
APF-DQN achieves best efficiency under strong currents: Under strong current conditions (intensity = 1.5), APF-DQN achieves 12.7% shorter path length (277.72 m vs. 318.28 m) and 37.1% lower energy consumption (66.00 vs. 104.99) compared to DQN, demonstrating that the hybrid framework effectively exploits strong currents for energy-efficient navigation.
-
Consistent low variance: APF-DQN exhibits the lowest variance across all metrics and conditions, indicating stable and predictable navigation behavior essential for real-world deployment.
Obstacle density
Algorithm performance is further evaluated under varying obstacle densities (15%, 25%, 35%). Table 13 summarizes the results.
APF-DQN demonstrates consistent 100% success rate across all obstacle density levels, while both E-APF and DQN show degraded performance under non-standard conditions:
-
DQN fails in sparse environments: DQN achieves only 75% success rate in sparse obstacle environments (15% density), with significantly degraded path quality (568.62 m vs. 259.91 m for APF-DQN). This counterintuitive result occurs because the agent was trained on 25% density; in sparse environments, the reduced obstacle-related reward signals cause the learned policy to behave erratically.
-
DQN severely degrades in dense environments: DQN achieves merely 20% success rate in dense environments (35% density), as the increased obstacle complexity exceeds the generalization capability of the learned policy.
-
E-APF struggles in dense environments: E-APF shows reduced success rate (80%) in dense environments due to increased local minima caused by complex obstacle configurations, where multiple overlapping repulsive fields create equilibrium points.
-
APF-DQN achieves best efficiency across all conditions: APF-DQN not only maintains 100% success rate but also achieves the shortest path length, fewest decision steps, and lowest energy consumption across all obstacle density levels. This demonstrates that the hybrid framework effectively generalizes to both sparse and dense environments.
Generalization across flow fields
To evaluate the generalization capability of APF-DQN, the model trained on the dual-gyre (same direction) flow field is tested across four different flow configurations without retraining. Table 14 presents the results.
The generalization experiments demonstrate that both APF-DQN and E-APF maintain 100% success rate across all four flow field configurations. Key observations include:
-
Consistent Success: Both APF-DQN and E-APF achieve perfect success rate across all flow configurations, demonstrating strong generalization capability of physics-informed navigation approaches.
-
E-APF excels in structured flow fields: E-APF achieves slightly better path efficiency in single-gyre (229.98 m vs. 234.56 m) and dual-gyre opposite (232.62 m vs. 243.84 m) configurations, where the deterministic potential field guidance aligns well with the coherent flow patterns. However, APF-DQN achieves comparable performance with differences of only 2–5%.
-
APF-DQN excels in challenging conditions: APF-DQN significantly outperforms E-APF in the uniform flow scenario, achieving 15.1% shorter path length (245.58 m vs. 289.22 m) with 87% lower variance (\(\pm 6.48\) m vs. \(\pm 49.30\) m). Uniform flow lacks the structured patterns that E-APF relies upon, causing its performance to degrade with high variance.
-
Training environment advantage: APF-DQN achieves the best performance on the training configuration (dual-gyre same direction), demonstrating that the learned component provides optimization benefits when the test environment matches the training distribution.
-
Policy fusion enables robustness: The consistent performance of APF-DQN across diverse flow fields can be attributed to the policy fusion mechanism, which adaptively balances learned behavior with physics-based guidance depending on the environmental conditions.
Limitations and safety considerations
While APF-DQN demonstrates strong performance across the tested configurations, it is important to acknowledge the limitations and potential failure modes of the proposed approach. This discussion provides guidance for practical deployment and identifies directions for future improvements.
Identified failure modes
Based on experimental observations and theoretical analysis, several potential failure modes are identified:
-
1.
Extreme Current Intensity: When ocean current velocity exceeds the USV’s maximum propulsion capability (\(\Vert \textbf{v}_c\Vert > \Vert \textbf{v}_{\max }\Vert\)), the USV may fail to make progress toward the goal. In such scenarios, navigation against the current becomes physically impossible regardless of the planning algorithm employed.
-
2.
Narrow Passages: The discrete 8-direction action space may limit precise maneuvering in environments with narrow passages (width < 2 grid cells). This limitation is inherent to the discrete action formulation and could be addressed by adopting continuous action spaces in future work.
-
3.
Distribution Shift: The DQN component is trained on dual-gyre flow fields. When deployed in significantly different flow structures, the learned Q-values may not accurately reflect optimal actions. However, the E-APF component compensates for this distribution shift through physics-based guidance, as evidenced by the maintained 100% success rate across all tested flow configurations.
-
4.
Complex Obstacle Configurations: Certain obstacle configurations (e.g., U-shaped traps aligned with the goal direction) may cause temporary entrapment. The ablation study shows that APF + Entropy alone achieves only 95% success rate with high variance, indicating that the combination of flow-aware guidance and entropy-based escape is essential for reliable navigation.
-
5.
Computational Constraints: The current framework assumes real-time access to ocean current predictions within the local observation window. In scenarios with limited onboard computational resources or degraded sensor measurements, the prediction accuracy may decrease, potentially affecting navigation performance.
-
6.
Sensor Noise: The current implementation assumes perfect state observation. In real-world deployments, sensor noise in position estimation, current velocity measurement, and obstacle detection may lead to suboptimal decisions or safety violations. Preliminary analysis suggests that Gaussian noise with standard deviation \(\sigma > 0.5\) grid units in position estimation can reduce success rate by approximately 10–15%.
These failure modes suggest directions for future improvements, including adaptive action resolution, robust training under diverse flow conditions, and uncertainty-aware decision-making mechanisms.
Safety mechanisms and mitigation strategies
To address the identified failure modes and enhance the practical safety of APF-DQN deployment, several mitigation strategies are proposed:
-
1.
Safety Filter: A constraint-based safety filter can be implemented as a post-processing layer that overrides potentially dangerous actions. Before executing any action \(a_t\) selected by the policy, the filter checks whether the predicted next state \(s_{t+1}\) satisfies safety constraints (e.g., minimum distance to obstacles \(d_{\min } > d_{\text {safe}}\)). If violated, the filter selects the safest alternative action from the action space.
-
2.
Conservative Mode Switching: When the system detects high-uncertainty conditions (e.g., Q-value variance exceeds threshold, or entropy of action distribution is high for consecutive steps), the control can automatically switch to a more conservative E-APF-dominated mode by increasing \(w_{\text {E-APF}}\) in the policy fusion mechanism.
-
3.
Emergency Stop Protocol: When the USV remains in a confined region for more than \(T_{\text {trap}}\) consecutive steps (indicating potential entrapment), the system can trigger an emergency stop and request human intervention or switch to a predefined escape maneuver.
-
4.
Robust State Estimation: To mitigate sensor noise effects, a Kalman filter or particle filter can be integrated for state estimation, providing smoothed position and velocity estimates that are more robust to measurement noise.
While these safety mechanisms are not implemented in the current experimental framework, they represent practical extensions for real-world deployment. The modular architecture of APF-DQN facilitates the integration of such safety layers without requiring fundamental algorithmic changes.
Conclusions
Path planning for USV in complex and dynamic ocean environments poses significant challenges due to environmental uncertainties and computational complexity. To address these challenges, an APF-DQN framework with Transformer-based ocean current prediction is proposed for USV path planning in complex marine environments.
The primary contributions of this research are as follows: (1) a multi-scale Transformer architecture is employed for high-precision current field prediction; (2) an E-APF is proposed, incorporating a dynamic current-induced force field and an entropy-driven local minima escape mechanism; (3) a median Q-value based exploration mechanism is introduced to improve the exploration efficiency of the conventional epsilon-greedy strategy; (4) by utilizing state-space augmentation, an APF-guided loss function, and policy fusion strategies, a multi-level integration framework of APF and DQN is established.
Experimental results confirm that the proposed APF-DQN method outperforms traditional approaches in complex marine environments. The ME strategy achieves faster convergence and higher training rewards than \(\epsilon\)-greedy methods. Integrating E-APF with DQN reduces path length and energy consumption during both training and testing. Incorporating ocean current data further improves success rates while minimizing path length, decision steps, and energy use. Compared to conventional T-APF methods, APF-DQN demonstrates superior performance across all metrics. These results validate that combining environmental perception with intelligent decision-making enables safe, energy-efficient path planning in dynamic marine conditions, marking a key advancement in autonomous marine robotics.
Future research directions encompass enhancing the computational efficiency of ocean current prediction and validating the algorithm in more complex and realistic environmental scenarios. The proposed APF-DQN framework holds significant potential to revolutionize path planning for USV, enabling safer, more efficient, and environmentally aware navigation in dynamic ocean environments.
Data availability
The data that support the findings of this study are available from the corresponding author, upon reasonable request.
References
Van Lancker, V. & Baeye, M. Wave glider monitoring of sediment transport and dredge plumes in a shallow marine sandbank environment. PLoS ONE 10, 1–19 (2015).
Odetti, A. et al. Lake environmental data harvester (led) for alpine lake monitoring with autonomous surface vehicles (asvs). Remote Sensing 16, 1998 (2024).
Vargas, S. M. et al. Monitoring multiple parameters in complex water scenarios using a low-cost open-source data acquisition platform. HardwareX 16, e00492 (2023).
Zhou, L. et al. An improved genetic algorithm for the recovery system of usvs based on stern ramp considering the influence of currents. Sensors 23, 8075 (2023).
Zhou, C. et al. The review unmanned surface vehicle path planning: Based on multi-modality constraint. Ocean Eng. 200, 107043 (2020).
Wu, G., Li, D., Ding, H., Shi, D. & Han, B. An overview of developments and challenges for unmanned surface vehicle autonomous berthing. Complex Intel. Syst. 10, 981–1003 (2024).
Cui, Z., Guan, W. & Zhang, X. Usv formation navigation decision-making through hybrid deep reinforcement learning using self-attention mechanism. Expert Syst. Appl. 256, 124906 (2024).
Hart, P. E., Nilsson, N. J. & Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 4, 100–107 (1968).
Dijkstra, E. W. A note on two problems in connexion with graphs. Numer. Math. 1, 269–271 (1959).
LaValle, S. M. Randomized kinodynamic planning. Int. J. Robot. Res. 18, 1044–1063 (1999).
Zhang, Y. Iot-based v2x communication for real-time dynamic obstacle prediction and adaptive rrt path planning. Alex. Eng. J. 116, 415–426 (2025).
Nithya, V., Krishnan, R. & Kumar, S. S. A constrained a* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and different current intensities. Ocean Eng. 168, 311–322 (2018).
Huang, Y., Li, X. & Zhang, J. Multi-objective path planning for unmanned surface vehicle with currents effects. ISA Trans. 88, 230–239 (2019).
Latombe, J.-C. Robot motion planning, 124 (Springer Science & Business Media, 1991).
Koren, Y. & Borenstein, J. Potential field methods and their inherent limitations for mobile robot navigation. In: Proc. 1991 IEEE International Conference on Robotics and Automation 1398–1404 (1991).
Fan, X., Guo, Y., Liu, H., Wei, B. & Lyu, W. Improved artificial potential field method applied for auv path planning. Math. Probl. Eng. 2020, 6523158 (2020).
Ge, S. S. & Cui, Y. New potential functions for mobile robot path planning. IEEE Trans. Robot. Autom. 16, 615–620 (2002).
Li, X., Zhang, Y. & Zhang, L. A novel unmanned surface vehicle path-planning algorithm based on a* and artificial potential field in ocean currents. J. Mar. Sci. Eng. 10, 285 (2022).
Souza, R. M. J. A. et al. Modified artificial potential field for the path planning of aircraft swarms in three-dimensional environments. Sensors 22, 1558 (2022).
Mnih, V. et al. Human-level control through deep reinforcement learning. Nature 518, 529–533 (2015).
Lv, L., Zhang, S., Ding, D. & Wang, Y. Path planning via an improved dqn-based learning policy. IEEE Access 7, 67319–67330 (2019).
Shen, H. & Tang, Y. A path planning strategy unified with a colregs collision avoidance function based on deep reinforcement learning and artificial potential field for usvs. Appl. Ocean Res. 113, 102759 (2021).
Hausknecht, M. & Stone, P. Deep reinforcement learning in parameterized action space. arXiv preprint arXiv:1511.04143 (2015).
Yang, Y., Wang, S. & Zhang, W. Time-optimal path planning in dynamic ocean currents using level set method. J. Mar. Sci. Eng. 10, 123 (2022).
Sutton, R. S. & Barto, A. G. Reinforcement Learning: An Introduction 2nd edn. (MIT Press, 2018).
Cao, Z., Zhou, C., Hu, C. & Qiu, Y. Research on dynamic job shop scheduling problem with agv based on dqn. Comput. Ind. Eng. 168, 108047 (2022).
Xu, W., Gao, F., Zhang, Y. & Gao, Z. Spatial memory-augmented visual navigation based on hierarchical deep reinforcement learning in unknown environments. Knowl.-Based Syst. 239, 107953 (2022).
Chen, H. et al. An online optimization escape entrapment strategy for planetary rovers based on bayesian optimization. J. Field Robot. 40, 567–584 (2023).
Chen, J., Zhao, W., Xu, N. & Wang, C. Interaction-aware trajectory prediction for safe motion planning in autonomous driving: A transformer-transfer learning approach. IEEE Trans. Intell. Transp. Syst. 23, 7943–7956 (2022).
Jiang, J. et al. Dynamic trend fusion module for traffic flow prediction. Expert Syst. Appl. 235, 121095 (2024).
Li, Y., Zhang, J., Liu, B. & Feng, Y. Remaining useful life prediction for stratospheric airships based on a channel and temporal attention network. Aerosp. Sci. Technol. 139, 108411 (2023).
Zhang, J., Wang, Y., Zhang, Y. & Huang, Y. Hybrid of neural network and physics-based estimator for vehicle longitudinal dynamics modeling using limited driving data. IEEE Trans. Intel. Veh. 8, 2302–2314 (2023).
Wang, J., Zhang, Q. & Zhao, D. A twisted gaussian risk model considering target vehicle longitudinal-lateral motion states for host vehicle trajectory planning. IEEE Trans. Intell. Transp. Syst. 23, 11803–11815 (2022).
Liu, J., Gao, Y. & Zhang, J. Multipath inflation factor for robust gnss/imu/vo fusion-based navigation in urban areas. IEEE Trans. Intell. Transp. Syst. 24, 5234–5246 (2023).
Lolla, T., Ueckermann, M.P., Yigit, K., Haley, P.J. & Lermusiaux, P.F. Path planning in time dependent flow fields using level set methods. 2012 IEEE International Conference on Robotics and Automation 166–173 (2012).
Subramani, D. N. & Lermusiaux, P. F. Energy-optimal path planning by stochastic dynamically orthogonal level-set optimization. Ocean Model. 100, 57–77 (2016).
Liu, Q., Wu, Z., Xu, Y. & Lv, M. Dynamic control of multiple stratospheric airships in time-varying wind fields for communication coverage missions. Aerosp. Sci. Technol. 134, 108163 (2023).
Wang, J., Zhu, K., Zhang, J. & Hu, J. Uav-relay-aided secure maritime networks coexisting with satellite networks: Robust beamforming and trajectory optimization. IEEE Trans. Wireless Commun. 22, 6027–6041 (2023).
Tang, W., Zhang, R., Wang, S. & Cao, H. Submesoscale kinetic energy induced by vertical buoyancy fluxes during the tropical cyclone haitang. J. Geophys. Res. Oceans 128, e2022JC019382 (2023).
Fossen, T. I. Handbook of Marine Craft Hydrodynamics and Motion Control (John Wiley & Sons, 2011).
Li, C. et al. Modeling and experimental testing of an unmanned surface vehicle with rudderless double thrusters. Sensors 19, 2051 (2019).
Chen, Y.-Y. & Ellis-Tiew, M.-Z. Autonomous trajectory tracking and collision avoidance design for unmanned surface vessels: a nonlinear fuzzy approach. Mathematics 11, 3632 (2023).
Hong, S. M., Ha, K. N. & Kim, J.-Y. Dynamics modeling and motion simulation of usv/uuv with linked underwater cable. J. Mar. Sci. Eng. 8, 318 (2020).
Wang, F., Bai, Y. & Zhao, L. Physical consistent path planning for unmanned surface vehicles under complex marine environment. J. Mar. Sci. Eng. 11, 1164 (2023).
Sun, Y., Song, H., Jara, A. J. & Bie, R. Internet of things and big data analytics for smart and connected communities. IEEE Access 4, 766–773 (2016).
Wang, Z. et al. Dueling network architectures for deep reinforcement learning. In International conference on machine learning, 1995–2003 (PMLR, 2016).
Schaul, T., Quan, J., Antonoglou, I. & Silver, D. Prioritized experience replay. arXiv preprint arXiv:1511.05952 (2015).
Kobayashi, T. & Ilboudo, W. E. L. T-soft update of target network for deep reinforcement learning. Neural Netw. 136, 63–71 (2021).
Funding
This work was supported by the National Nature Science Foundation of China (No. 62303158).
Author information
Authors and Affiliations
Contributions
Conceptualization, N.Z. and Y.C.; Methodology, N.Z. and Y.C.; Software, N.Z. and Y.W.; Validation, M.J. and Y.W.; Formal analysis, N.Z., Y.C. and Y.W.; Investigation, Y.W.; Data curation, Y.W.; Writing—original draft, N.Z.; Writing—review & editing, N.Z and Y.W; Supervision, Y.C. and B.W.; Funding acquisition, Y.C.All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhang, N., Chen, Y., Wu, Y. et al. A hybrid APF-DQN framework with transformer-based current prediction for USV path planning in dynamic ocean environments. Sci Rep 16, 3575 (2026). https://doi.org/10.1038/s41598-025-33525-2
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-33525-2
