
Abstract
Dung Beetle algorithm is an intelligent optimization algorithm with advantages in exploitation ability. However, due to the high randomness of parameters, premature convergence and other reasons, there is an imbalance between exploration and exploitation ability, and it is easy to fall into the problem of local optimal solution. The purpose of this study is to improve the optimization performance of dung beetle algorithm and explore its engineering application value. A balanced dung beetle optimization algorithm was proposed, and parabolic adaptive parameter \(R\) was introduced to broaden the exploration range and slow down premature convergence. Gaussian distributed phase parameter \(\beta\) is introduced to reduce the randomness of parameters and stimulate the potential of algorithm exploitation. Levy flight escape strategy is introduced to balance the global exploration ability of the algorithm and fully explore the solution space. The effectiveness of the improved strategy is verified by comparing the CEC2017 benchmark function with the single strategy variant. The experimental results show that BDBO algorithm is superior to other algorithms in terms of convergence accuracy and generalization ability, and the accuracy improvement percentage is 35.29% compared with DBO algorithm. Wilcoxon rank sum test was used to evaluate the experimental results, which proved that the improvement strategy was statistically significant. Finally, the BDBO algorithm is applied to the tracking technology of the maximum power point of the photovoltaic system, and the experimental results show that the application effect of the BDBO algorithm is better and has more engineering application value.
Similar content being viewed by others

Introduction
Meta-heuristic algorithm is a class of methods for solving global optimization problems1. Because it is easy to understand and implement, and has high optimization efficiency, it is widely used in computer science, medicine, artificial intelligence, engineering optimization and other fields to solve various optimization problems2. Classical meta-heuristic algorithms such as PSO, DE, GA, etc. provide inspiration for the subsequent research and development of many optimization algorithms. According to the No Free Lunch (NFL) theorem, many meta-heuristic algorithms based on animal group behavior have been proposed. Erik and Miguel et al. proposed a social spider optimization algorithm (SSO) based on the cooperative behavior of social spiders, which can alleviate the problems of premature convergence and unbalanced exploration and exploitation ability through gender-specific search agent mechanisms3. Hector et al. proposed a hybrid metaheuristic algorithm using metaheuristic operators from unstructured evolutionary game theory and fusing Cheetah Optimizer and Particle Swarm Optimization to solve continuous optimization problems4. Xue and Shen proposed the Dung Beetle Optimizer (DBO) algorithm based on the group cooperation mechanism of dung beetle population5. DBO algorithm has the characteristics of fast convergence6 and strong exploitation ability7.
The generalization ability is reflected by the transfer performance of the algorithm between different problems and the adaptability on datasets with similar characteristics but different distributions. DBO algorithm has strong generalization ability because of its group search characteristics, which is very suitable for complex dynamic optimization problems. Therefore, this study chooses to further explore the potential of DBO algorithm. DBO algorithm has problems such as unbalanced exploration and exploitation ability, easy to fall into local optimal solution8 and premature convergence9 due to excessive parameter randomness and premature convergence. In order to explore better optimization performance, convergence speed and accuracy of DBO algorithm, some scholars have carried out improvement research on DBO algorithm. He et al. initialized the population by Chebyshev chaotic mapping, and used curve-adaptive Gold Sinusoids strategy and Levy flights with Cauchy-t mutation strategy to replace the position updating equation of some dung beetles, so as to improve the exploration power of search and the generalization ability of the algorithm10. Xiao and Cui et al. used the good point set initialization strategy and greedy strategy to improve the population quality, and introduced differential evolution strategy and Dynamic Lens Opposition-Based Learning (DLOBL) to improve the convergence accuracy of the algorithm11. Adegboye et al. used dynamic pinhole imaging technology (DGS-SCSO) to enhance the global exploration ability of the algorithm, and used the golden sine algorithm strategy to improve the convergence speed of the algorithm12. Farah et al. used auxiliary function pairs to correct the mean position to solve the problem that the algorithm is easy to fall into local optimum, and introduced nonlinear equations to coordinate the exploration and exploitation stages of the traditional SCA algorithm13. Ülker et al. used Gaussian mutation specular reflection learning (GS) and local escape operator (LEO) to prevent local optima and improve convergence speed14. In addition, some scholars have developed new algorithms to solve the problem of unbalanced exploration and exploitation capabilities. Erik et al. proposed a state of matter search algorithm (SMS) based on natural phenomena. SMS algorithm can modify the intensity of exploration and exploitation in different stages to improve the balance between exploration and exploitation, while retaining the good search ability of evolutionary algorithm15. Cao et al. proposed an Enhanced WOA algorithm (EWOA). EWOA adopts Improved Dynamic Inverse Learning (IDOL) to adaptively adjust the exploitation and exploration mode, and uses adaptive weights to prevent falling into local optimal solutions16. Zhao et al. proposed an improved shuffled frog leaping algorithm with inertia weight (MSFLA)17. The inertia weight a was introduced to increase the exploration range, so as to balance the exploration and exploitation ability of the algorithm. Erik et al. proposed a new metaheuristic optimization algorithm based on search strategy and social strategy, which used counters to determine the exploration mode of search agents to improve the diversity of search patterns18.It can be seen that the use of strategies such as initialization mapping and adaptive weights can improve the performance of the algorithm to a certain extent and balance the exploration and exploitation ability of the algorithm, but there are also certain shortcomings. For example, the initialization mapping method has certain limitations, and it is difficult to effectively improve the adaptability and flexibility of the algorithm in dealing with different problems. The location update alternative method cannot fully tap the local exploitation potential of the original algorithm, resulting in a waste of computational resources19. The Cuckoo Search (CS) and refraction learning (RL) methods adopted by Adegboye et al. can stimulate the local development potential of the algorithm20. Therefore, the DBO algorithm still has a large space to explore, which is the main motivation to study it and introduce it into engineering applications in this paper.
MPPT controller is an important part of photovoltaic system and an important control device to ensure the efficient use of photovoltaic energy21. The output power of solar panels is affected by many factors, which in turn affect the utilization of light energy. At present, most photovoltaic power stations use MPPT technology, combined with intelligent optimization algorithms to adjust the operating point to ensure that it is always at the maximum power point to make full use of available solar energy22. Therefore, it is crucial to precisely regulate the maximum power point so that the photovoltaic system can output at maximum power23. In recent years, many scholars have introduced different swarm intelligence optimization algorithms into the MPPT technology of photovoltaic systems24 and conducted in-depth studies. Such as genetic algorithm25, differential evolution algorithm26, particle swarm optimization algorithm27, Bat algorithm28, Gray Wolf algorithm29, simulated annealing algorithm30, gravity search algorithm31, Henry Gas solubility optimization algorithm32, etc. However, these algorithms have their own advantages, but they also have problems such as premature convergence and easy to fall into local optimal solutions, especially in variable and complex application problems. Therefore, it is necessary to introduce a more adaptive and flexible optimization algorithm into the MPPT control system.
The local exploitation potential is reflected in the improvable space of the algorithm’s ability to explore the global optimal solution in the best exploration region. In order to balance the exploration and exploitation ability of DBO algorithm and fully tap its local exploitation potential, a balanced dung beetle optimization algorithm is proposed and applied to MPPT control of photovoltaic system. Firstly, a parabolic curve is used to replace the linear change of \(R\) parameter to broaden the area search range and slow down the premature convergence. The independent random vectors \(b1\), \(b2\), \(C2\) are replaced by random numbers obediently normal distribution to reduce the randomness of parameters and stimulate the exploitation ability potential of the algorithm. In addition, the Levy flight escape mechanism is introduced to balance the global exploration ability of the algorithm and fully explore the solution space33. Different from the previous single strategy improvement, the parabolic \(R\) parameter and Levy flight can slow down the slow convergence of the single strategy variant with Gaussian distribution parameters, and realize the complementary advantages of strategies. In order to verify the performance of BDBO algorithm, we use the CEC2017 benchmark function to conduct a series of comparative experiments to evaluate the optimization ability of the algorithm, and the Wilcoxon rank sum test is used to evaluate the experimental results to analyze their statistical significance. Finally, the BDBO algorithm is applied to the MPPT technology to verify the practical application potential of the algorithm34.
The main contributions of this paper are summarized as follows:
-
1.
In BDBO, DBO is the main body of the algorithm. The Gaussian distributed parameter \(\beta\) strategy was used to reduce the randomness of the parameters and further stimulate the exploitation ability potential of the algorithm.
-
2.
The Levy flight escape mechanism was introduced to balance the global exploration ability of the algorithm. The parabolic \(R\) parameter strategy was used to slow down the premature convergence, and the Gaussian distributed parameter \(\beta\) strategy variant was used to slow down the slow convergence speed.
-
3.
Through the benchmark function test, it is verified that the improved Dung beetle optimization algorithm is more superior in generalization ability and convergence accuracy. The Wilcoxon rank sum test was used to prove the significant difference between the experimental results of the improved strategy, especially the Gaussian distributed parameter \(\beta\) strategy variant, and the original DBO algorithm.
-
4.
The improved dung beetle optimization algorithm is applied to MPPT optimization example of photovoltaic system, and its practical application value is verified by circuit simulation experiment compared with other optimization algorithms.
The rest of this paper is organized as follows: The second section mainly introduces the basic principle of the dung beetle algorithm, and explains the shortcomings of the algorithm. Section 3 describes the BDBO algorithm in detail and analyzes the complexity of the algorithm. In the fourth section, the CEC2017 benchmark functions are selected to evaluate the performance of the BDBO algorithm, and the Wilcoxon rank-sum test is used to evaluate the experimental results. In the fifth part, the application potential of BDBO is verified by using MPPT technology. Section 6 summarizes the conclusions of this study.
Overview of the DBO algorithm
Basic DBO algorithm
The DBO algorithm is inspired by the rolling, dancing, foraging, stealing and reproduction behaviors of dung beetle populations in nature, and simulates the competition phenomenon of dung beetles through group cooperation. DBO algorithm has the advantages of strong evolutionary ability, fast search speed and strong exploitation ability. The algorithm searches for the global optimal solution through the specific behaviors of four types of dung beetles. There are four types of rolling dung beetles, nursing dung beetles, foraging dung beetles and stealing dung beetles, among which rolling dung beetles can perform two kinds of behaviors: rolling dung beetles and dancing, and the general proportion distribution is set at 20%, 20%, 25% and 35%.
Ball rolling dung beetle
In nature, dung beetles use light to navigate, making sure they move in a straight line. In the optimization process, the rolling dung beetle explores the solution space according to its fitness and historical movement direction, and its position update mode is shown in Eq. (1).
where, \({x}_{i}^{t}\) represents the position of the i dung beetle at the t step, k ∈ (0,0.2) represents the constant value of the deflection coefficient, which is generally set to 0.1, and b ∈ (0,1) represents the constant term, which is generally set to 0.3. \(\Delta x\) is used to simulate changes in light intensity, and its calculation equation is shown in Eq. (2).
where, \({x}_{\text{worst}}\) indicates the global worst position information. \(\alpha\) ∈(−1,1) is used to simulate the direction deviation under natural factors, and the renewal equation of \(\alpha\) is shown in Eq. (3).
where \(\eta\)∈(0,1) represents a random number and \(\lambda\) represents the probability that the beetle will not be able to move forward when it encounters an obstacle. \(\alpha =1\) indicates straight line movement in the current direction, \(\alpha =-1\) indicates deviation from the original direction.
When dung beetles encounter obstacles, they change direction by dancing. In the DBO algorithm, when the rolling dung beetle encounters a boundary, it changes its direction of movement through the tangent function. The updated dance behavior calculation equation is shown in Eq. (4).
where \(\theta\) ∈[0, π] represents the deviation coefficient, \(\theta\) ∈{0, π/2, π} does not update the position. Thus, directional changes in rolling dung beetles are closely related to historical location information.
Raising dung beetles
In nature, dung beetles will roll the dung ball to a safe place to lay eggs, providing a safe feeding environment for young dung beetles. In the DBO algorithm, dung beetles use boundary selection strategy to restrict the spawning area in order to find the best solution in the local optimal area. The spawning area definition equation is shown in Eq. (5).
where, \(L{b}^{*}\) is the lower boundary of the spawning area and \(U{b}^{*}\) is the upper boundary of the spawning area. \(R=1-t/T\) is used to control the boundary change of the spawning area, where T represents the maximum number of iterations and \({X}^{*}\) is the local optimal solution. In the DBO algorithm, dung beetles breed in the local optimal area to produce a new generation of candidate solutions. The position update equation of the oosphere is shown in Eq. (6).
where, \(b1\) and \(b2\) are independent random vectors of 1 × D, \({B}_{i}^{t}\) is the position of the i feeder beetle at the t iteration, and D is the dimension. The use of mutation operation to update the location is conducive to improving the local exploitation ability.
Dung beetles on the prowl
The young beetles will be guided by the best feeding areas. The optimal feeding area is affected by the global optimal solution, and the boundary definition equation of the optimal feeding area is shown in Eq. (7).
where \({X}^{b}\) is the global optimal location, \(L{b}^{b}\) is the lower bound of the best foraging region, \(U{b}^{b}\) is the upper bound of the best foraging region, and \(R\) parameter is used to control the proximity of the foraging region boundary to the global optimal solution. The foraging dung beetle will search for the optimal solution in the optimal feeding area, and the position renewal equation of the foraging dung beetle is shown in Eq. (8).
where \({C}_{1}\) represents a random number subject to normal distribution, and \({C}_{2}\) ∈ (0,1) represents a random vector of size 1 × D. Using the normal distribution of parameter \({C}_{1}\) to guide the searching behavior of dung beetles is conducive to improving the local exploitation ability.
The thieving dung beetle
The theft mimics what some dung beetles do when they steal dung balls. Interspecies collaboration and information sharing are facilitated by cross-operation of dung beetle. The replacement equation for stealing dung beetles is shown in Eq. (9).
where S is a constant term, g represents a random vector of size 1 × D that follows a normal distribution, \({X}^{*}\) is the current local optimal solution, and \({X}^{b}\) is the global optimal solution.
Algorithmic inadequacy
Premature convergence
Dung beetle optimization algorithm has strong generalization ability and exploitation ability, but it also has some defects in algorithm accuracy. The algorithm tends to employ a greedy search strategy throughout the entire search process. Based on Eqs. (5) and (7), both brooding dung beetles and foraging dung beetles utilize the optimal solution \({X}^{*}\)、\({X}^{b}\) to determine the most favorable search area, subsequently updating their positions using information from the optimal solution and the identified best search area. However, the multiple utilization of the optimal solution may accelerate the premature convergence between the local best region and the local optimal solution. The dynamic boundary equation of the best search region is given in Eq. (10).
According to the equation, the positions of brooding and foraging dung beetles are strictly restricted to the optimal region, and the optimal search region is affected by the \(R\) parameter. \(R=1-t/T\) is linearly decreasing, and the dynamic boundary and range of the best region gradually decrease with the number of iterations. Reducing the search region prematurely is easy to cause the algorithm to fall into the local optimal solution.
Imbalanced exploration
The exploration ability of the dung beetle determines the exploration range and convergence speed of the algorithm. According to Eq. (1), the dung beetle uses \({x}_{i}^{t}\), \({x}_{i}^{t-1}\) and light intensity \(\Delta x\) to update its position. However, the number of ball-rolling dung beetles is small and the migration range is small, which makes it difficult to fully explore the solution space or escape from the local optimal solution. Secondly, the light intensity \(\Delta x\) is affected by the global worst position \({x}_{\text{worst}}\), which may affect the quality of new solutions. It is difficult to effectively explore the new best search area by only rolling ball behavior and dancing behavior, which affects the balance between exploration and exploitation ability, and makes the algorithm easy to fall into local optimal solutions 35.
High randomness of parameters
Brooding dung beetles and foraging dung beetles can provide superior exploitation ability by exploring the optimal solution in the best search area. According to Eqs. (6) and (8), the two dung beetles exploit locally by using the best search area boundary information, and the utilization degree of the search area boundary information is affected by the random weights \({b}_{1}\), \({b}_{2}\), \({C}_{1}\) and \({C}_{2}\). However, the randomness of the weight parameter is too high. In the exploitation stage, the random parameter is too high to limit the local exploitation ability of dung beetles, affect the quality of new solutions, and it is difficult to fully tap the exploitation potential of the algorithm36.
The proposed algorithm
Dung Beetle Optimization Algorithm (DBO) has strong exploitation ability, but it still needs to solve the problems of premature convergence, unbalanced exploration ability and high randomness of parameters. The proposed Balanced Dung beetle optimization algorithm (BDBO) reduced the randomness of parameters, enhanced the exploration ability and escape ability, and further explored the exploitation potential of the algorithm.
Parabolic R parameter substitution
In the DBO algorithm, ball-rolling dung beetles are responsible for global exploration, while brooding dung beetles, foraging dung beetles, and stealing dung beetles collaborate for local exploitation. The exploitation dung beetle uses the boundary information of the search area to update its position. The local optimal search area is affected by the parameter \(R\), and the premature convergence of the search area is easy to cause the algorithm to fall into the local optimal solution. The reduction speed of the search area can be slowed down by adjusting the \(R\) parameter. Equation (11) is the update equation of the \(R\) parameter.
According to literature37, nonlinear control parameters are conducive to balancing exploration and exploitation capabilities. Literature38 proposes an inverted S-type control parameter, which proves that nonlinear control parameters play a coordinating role. The optimal search area shrinks with the linear decrease of the parameter \(R\), and the search area shrinks too fast, which is not conducive to the algorithm to explore the global optimal solution. Therefore, the parabolic shape parameter is proposed to replace the parameter \(R\) in order to broaden the local optimal region. The update equation for the parabolic adaptive control parameter \(R\) is as shown in Eq. (12).
where R is used to control the local optimal region change, and t is the current number of iterations. The change curve of parabolic adaptive parameter \(R\) is shown in Fig. 1.

A parabolic curve.
It can be seen from Fig. 1 that the updated control parameter \(R\) presents a parabolic linear change. The adaptive parameters can change dynamically according to the number of iterations, and the value of the parabolic control parameters under the same number of steps is larger, and the local optimal area is more extensive, which can prevent the algorithm from falling into the local optimal solution due to premature convergence, balance the exploration and exploitation ability.
Gaussian distributed parameter substitution
Disturbance factor is a technique that uses random parameters to improve the performance of the algorithm. Using disturbance factor to control the population search behavior can prevent the algorithm from falling into local optimal solution. However, if the randomness of the disturbance factor is too strong, the search performance of the algorithm will be limited. The position update of brooding dung beetles and foraging dung beetles is affected by random parameters, and controlling individual update by random parameters can increase the diversity of population39. However, in the exploitation phase, the high randomness of the parameters will affect the quality of the updated solution and limit the exploitation ability of the algorithm. The location renewal mode of dung beetles rearing and foraging is shown in Eq. (13).
where the control parameters \(b1\), \(b2\) and \(C2\) are random vectors. To solve the above problems, Gaussian distributed random parameters were used to replace random vectors to reduce the randomness of parameters40. The standard deviation of the normal distributed parameters has a significant impact on the parameter randomness. Therefore, the normal distribution parameters are used to control the random parameters by a small standard deviation, and then the fine disturbance of local search is generated to stimulate the development potential of the algorithm. In addition, the phased parameter control strategy is used to improve the convergence speed of \(b1\) and other parameters in different stages. In the early stage of exploration, random vector parameters were used to achieve variation operations and increase population diversity. In the later stage of exploitation, Gaussian distributed random numbers are used to control the population search behavior and realize the fine exploitation of local areas. The corresponding form of the control parameter \(\beta\) at different stages is shown in Eq. (14).
where \(\beta\) represents the three control parameters \(b1\), \(b2\) and \(C2\), and the Gaussian distribution parameter \(\mathcal{N}(mean,std)\) can be regulated according to the actual situation. The distribution state is set as \(\mathcal{N}(0,0.1)\) in the simulation experiment. The change process of control parameter \(\beta\) is shown in Fig. 2.

Parameter control strategy presented.
The blue trajectory represents the early exploration stage, where the degree of variation of random parameters is large, while the red trajectory represents the exploitation stage, where parameters are generated in a Gaussian distributed way, guiding the detailed exploitation of local areas. Gaussian distributed parameter control strategy can improve the utilization of local optimal solutions and stimulate the exploitation potential of algorithms.
Levy flight escape strategy
The escape ability is reflected in the ability of the algorithm to jump out of the local optimal solution by using long-distance migration. Random walk, Levy flight and other methods can help the algorithm jump out of the current search area, dynamically adjust the search range and direction, and prevent it from falling into the local optimal solution. The number of rolling dung beetles is small and the migration range is small, so it is difficult to effectively explore the new best search area or escape from the local optimal solution, which affects the balance between exploration and exploitation ability, and makes the algorithm easy to fall into the local optimal solution. In order to solve the above problems, Levy flight is used to travel long distances to fully explore the solution space. Levy flight41 was first proposed by Paul Pierre Lévy and applied to Cuckoo Search Algorithm by Xin-She Yang and Suas Deb42. Levy flight combines the characteristics of short-range dense search and long-distance accidental jump, which can realize multi-scale exploration in the search space and provide a mechanism for the algorithm to jump out of local optimum. Many scholars43 will use Levy flight to carry out long-distance travel to enhance the optimization performance of the algorithm. Its calculation equation is shown in Eq. (15).
where \({x}_{i}(t)\) represents the current position, \(\oplus\) represents the point-to-point product, \(Levy(\lambda )\) represents the Levy step size, and \(l\) is the step scale coefficient. In order to improve the exploration ability and escape ability of the algorithm, a Levy flight escape strategy was proposed to help the algorithm escape from the local optimal solution. Its pseudocode is shown in Table 1.
When the global optimal solution is not updated for K consecutive times, the algorithm is regarded as having local stagnation, and Levy flight is used to update the position information of the rolling dung beetle. Related literature44 shows that the algorithm performs well when K = 10. The process of escaping the local optimal solution using levy flight is shown in Fig. 3.

Escape route presentation.
where the sphere range represents the local optimal region and the cyan straight line is the position change path of the global optimal solution. It can be seen from the Fig. 3 that Levy flight has good global exploration ability, which can balance the exploration ability of the algorithm and help the algorithm effectively escape from the local optimal solution.
BDBO algorithm flow
Using parameter substitution strategy and Levy flight escape strategy can effectively improve the optimization performance of the algorithm. The implementation process of balanced dung Beetle Optimization algorithm (BDBO) is shown in Fig. 4.

Flowchart of BDBO algorithm.
The BDBO algorithm generates dung beetle populations through random initialization and evaluates the location information of dung beetles according to the fitness function. In each iteration, the rolling dung beetle updated its position by rolling and dancing. The optimal local renewal area was determined by the substituted \(R\) parameter, and the breeding dung beetles and foraging dung beetles updated according to the stage changes of \(\beta\) parameter. Thieving dung beetles update their location by stealing. In addition, when the global optimal solution is not updated for K consecutive times, dung beetles will migrate through Levy flight to escape the local optimal solution.
The complexity of population initialization in the original DBO algorithm is \(O(n\cdot d)\), where \(d\) represents the dimension and \(n\) represents the population number. The algorithm runs \(t\) times, and the complexity of the update operation of the four types of dung beetles under each iteration is \(O(0.25n\times d)\), so the total time complexity is \(O(t\cdot (n\cdot d+f))\), where \(f\) represents the cost of fitness function evaluation. In the improved BDBO algorithm, the computational complexity of \(R\) parameter updating \(t\) times is \(O(t\cdot 1)\). Breeding and foraging dung beetles need to randomly sample the parameters of Gaussian distribution, and the computational complexity is about \(O(\frac{9}{10}\cdot \frac{n}{2}\cdot d)\). The computational complexity of generating the \(Levy\) flight step is about \(O(\frac{n}{4}\cdot d)\), which is negligible since the \(Levy\) flight strategy is only executed when the global optimal solution has not been updated many times. Therefore, the time complexity of BDBO is about \(O(t\cdot (\frac{29}{20}\cdot n\cdot d+f+1))\), which does not significantly increase the complexity of the original DBO algorithm.
Experimental evaluation and results
Experiment preparation
In the research of optimization algorithm, CEC test set is the recognized benchmark function test set. In order to verify the optimization performance of the proposed BDBO algorithm, part of the CEC-2017 benchmark function test set was used to compare the BDBO algorithm with excellent metaheuristic optimization algorithms. F1 to F12 are unimodal functions as shown in Table 2, and F13 to F24 are multi-modal functions as shown in Table 3. In addition, the study analyzed the statistical significance of the improved strategy by performing a Wilcoxon rank-sum test with a significance level of 5% to evaluate the results of the single strategy variant comparison experiment.
The experiment uses \(Matlab\) R2023a software under Windows 11 operating system to execute the code, and the simulation experiments are all run in the computer equipment configured as 7950X–14,900K, and the computing memory is 64G. The initial population is set to 100, the upper and lower bounds are set to [100, −100], the dimensions are set to 30 and 100 dimensions, the number of independent runs is set to 10, and the random seed value is set to 123–132. The number of iterations of the traditional algorithm comparison experiment is set to 1000, and each iteration is evaluated, and the function test is carried out in 30 dimensions and 100 dimensions. The number of iterations of the comparison experiment of the improved algorithm is set to 30,000, and the dimension is set to 100. The number of iterations for the comparison experiment of the variant algorithm is set to 1000, and the dimension is set to 100. The optimization performance of BDBO algorithm is verified by the above comparison tests.
Traditional algorithm comparison
In order to verify the improvement effect of the proposed BDBO algorithm, dung Beetle Optimization algorithm, firefly optimization algorithm, particle swarm optimization algorithm, Cuckoo optimization algorithm and fireworks optimization algorithm were selected for comparison experiments. In addition, the BDBO algorithm is compared with the DBO algorithm improved by single policy to verify the effectiveness of the improved strategy.
-
1.
Firefly Algorithm (FA) is a global optimization algorithm based on natural selection and evolution45. Inspired by the bright light behavior of fireflies, the algorithm is easy to implement and can make full use of the parallel computing performance of computers to speed up optimization.
-
2.
Particle swarm optimization (PSO) is one of the most classic swarm intelligence algorithms46, inspired by the phenomenon of bird predation and fish foraging. PSO algorithm has strong optimization performance for non-convex optimization problems.
-
3.
Cuckoo Search Algorithm (CSA) is a global optimization algorithm based on Levy flight47, inspired by cuckoo’s breeding strategy. Cuckoo optimization algorithm, which combines stochastic search and deterministic search, is one of the early optimization algorithms that introduced Levy flight into applied mathematics.
-
4.
Fireworks Algorithm (FWA) has a strong adaptive ability, and its inspiration comes from the blooming of fireworks48. Because of its adaptive characteristics, fireworks algorithm can show strong global exploration ability and adapt to various continuous and discrete optimization problems.
The test results from F1 to F8 are shown in Table 4. The test results from F9 to F16 are shown in Table 5. The test results from F17 to F24 are shown in Table 6. By comparing the mean value, standard deviation, minimum fitness value and convergence curve of the operation results, the actual optimization effect of the BDBO algorithm can be intuitively understood.
It can be seen from Table 4 that in the unimodal test function, the BDBO algorithm is very competitive in both 30 and 100 dimensions. As can be seen from the table, in the 30-dimensional unimodal function test, FA and FWA algorithms have problems of premature convergence and falling into local optimal solutions, but BDBO algorithm can constantly jump out of local optimal solutions through Levy flight and carry out local fine exploitation. The convergence curve in 30 dimensions is shown in Fig. 5.


30-dimensional convergence curve.
As can be seen from the Fig. 5, in the test functions F4 and F5, the escape and exploitation ability of BDBO algorithm is the most obvious, and the optimization effect of the algorithm is the best, indicating that the improved strategy effectively improves the ability of DBO algorithm to escape the local optimal solution. In addition, in the multi-modal test function, BDBO algorithm is more superior than other algorithms, which indicates that BDBO algorithm has stronger adaptability and flexibility. The convergence curve in 100 dimensions is shown in Fig. 6.


100-dimensional convergence curve.
As can be seen from the Fig. 6, in the high-dimensional multimodal test function, the algorithm will face problems such as dimensional disaster and local optimal solution, and other algorithms are trapped in local optimal solutions, but BDBO algorithm shows excellent optimization performance. In addition, in the benchmark function, the optimization performance of BDBO is significantly better than the original DBO algorithm, and has more advantages over other algorithms. Therefore, the proposed improvement strategy plays a substantial role in improving the performance of DBO algorithm.
Improved algorithm comparison
The choice is to utilize the latest Dung beetle optimization algorithm based on quantum computing and multi-strategy fusion (QHDBO) and the improved sine-guided Dung Beetle Optimization (IDBO) algorithm were compared with BDBO algorithm to verify the improved effect of the algorithm49,50, and the experiment was carried out under the condition of 100 dimensions. The comparative experimental results show that the BDBO algorithm is significantly better than QHDBO and IDBO in terms of optimization accuracy, especially in the multimodal test functions, the optimization accuracy of BDBO algorithm is always in the leading position. The benchmark function test results are shown in Table 7.
It is known from Table 8 that the BDBO algorithm has good optimization performance in high-dimensional multimodal benchmark functions. Secondly, the standard deviation of the experimental results of BDBO algorithm is significantly higher, which indicates that the algorithm is highly sensitive to random parameters, and the fine disturbance of parameters has a significant impact on the optimization performance of the algorithm. However, its stability and time complexity still need to be improved. There are many disturbance factors in BDBO algorithm, and Gaussian distributed parameters effectively reduce the randomness of parameters, but also enhance the sensitivity of the algorithm to parameters. Secondly, the running time of BDBO is relatively long, which indicates that there is still much room for improvement in its computational complexity. The convergence curve of the variant algorithm intuitively shows the advantages of BDBO algorithm over QHDBO and IDBO improved algorithms. The convergence curve of the variant algorithm is shown in Fig. 7.

Convergence curve of the variant algorithm.
The observation of Fig. 7 shows that BDBO algorithm has good convergence speed and optimization accuracy, which is significantly better than the other two algorithms. The optimization effect of BDBO algorithm is more dependent on the number of evaluations, and the fitness value steadily decreases with the increase of the number of evaluations. Secondly, the optimization ability of BDBO algorithm becomes more and more prominent with the increase of dimension and mode, indicating that BDBO algorithm is more suitable for complex optimization problems.
Single strategy variant comparison
In order to verify the effect of the improved strategy, the BDBO algorithm is compared with the single strategy variant, and the experiment was conducted under the condition of 100 dimensions. The test results from f1 to f16 are shown in Table 9, the test results from f17 to f21 are shown in Table 10, in which BDBO represents the balanced dung beetle optimization algorithm, DPO-R represents the parabolic adaptive parameter \(R\) strategy, DPO-G represents the Gaussian distributed parameter \(\beta\) strategy, and DPO-L represents the Levy flight escape strategy.
The observational results show that, the single strategy variants have their own advantages in the benchmark experiment. Levy flight speed can explore the optimal solution interval, and continuously escape the local optimal solution through long-distance walking. Using Gaussian distributed parameter \(\beta\) to greatly enhance the utilization of the global optimal solution can further stimulate the exploitation potential of the algorithm. The parabolic adaptive parameter \(R\) can be used to broaden the exploration scope of dung beetles, balance the exploration and exploitation capabilities of the algorithm, quickly converge to the optimal solution interval in the early stage, and significantly improve the optimization performance of the algorithm by combining the parameter \(\beta\) and Levy flight strategy. The experimental convergence curve of the single strategy variant is shown in Fig. 8.

Single strategy variant convergence curve.
As can be seen from Fig. 8, the effect of the DPO-G variant and the BDBO algorithm is relatively better under the single mode scenario of F1–F9, indicating that the Gaussian distributed parameter \(\beta\) strategy is the main reason for the improved algorithm accuracy. And compared with DPO-G, BDBO algorithm in the early exploration stage has stronger exploration ability and can quickly converge to the local optimal region. In addition, the BDBO algorithm also has obvious advantages in the late iteration. Therefore, the proposed BDBO algorithm has practical significance.
The study used the Wilcoxon rank-sum test method to test the results of the single strategy variant comparison test. The Wilcoxon rank sum test is a nonparametric test method to test for significant differences between the two algorithms51. Using statistical tests to avoid the chance of experimental results is a common method for algorithm testing experiments. The p-value results of the Wilcoxon rank sum test are shown in Table 11.
Table 11 shows that the BDBO algorithm has significant advantages over the original DBO algorithm, and the experimental results of 17 test functions out of 21 have significant differences, indicating that the proposed improvement strategy is statistically significant. The single strategy variants DBO-R, DBO-L and DBO-G have great advantages over the original DBO, and can significantly improve the optimization performance of the algorithm. In addition, the percentage of accuracy improvement calculated by BDBO algorithm over DBO algorithm is 35.29%, and the optimization accuracy is significantly improved. Therefore, the improved strategy can significantly improve the optimization performance of the algorithm. It is worth noting that the test results of the DBO-G variant show that the p-value in the 17 test functions is less than 0.05, which is a significant difference, indicating that the random parameter \(\beta\) has a great influence on the optimization performance of the DBO algorithm. In addition, it can be seen from Fig. 7 that the parabolic \(R\) parameter and Levy flight escape strategy can slow down the slow convergence of DBO-G variant, and the optimization performance of DBO algorithm can be significantly improved with the Gaussian distribution parameter \(\beta\) strategy.
MPPT application based on BDBO algorithm
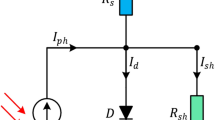
In order to verify the practical application effect of BDBO algorithm, the particle swarm optimization algorithm and gravity search algorithm (GSA) are applied to MPPT module to compare the experiment, and the power point tracking efficiency of the three algorithms is compared by observing the output power convergence curve. In the working circuit of photovoltaic system, it is crucial to accurately build function components for power point optimization to improve the conversion rate of light energy52. Using the \(simulink\) tool to simulate the photovoltaic circuit, as shown in Fig. 9, the optimization algorithm call exists in the form of components in the circuit. The experiment set up the same circuit simulation conditions to control the influence of irrelevant variables. In addition, dynamic parameter acquisition is accepted through an online algorithm to ensure real-time power point optimization.

Photovoltaic circuit simulation.
The Boost circuit is constructed based on the I-U characteristics of photovoltaic cells. In practical application engineering, the photovoltaic circuit is composed of multiple photovoltaic cells in series and parallel, and its I–U characteristics are affected by the number of series and parallel cells. The I–U characteristic expression of the combined circuit is shown in Eq. (16)53.
where \({I}_{PV}\) is the output current of the photovoltaic cell, \({I}_{ph}\) is the photogenerated current, \({I}_{d}\) is the saturation current, \({V}_{PV}\) is the output voltage of the solar cell, \(A\) is the ideal factor, \(K\) is the Boltzmann constant, \(T\) is the immediate temperature, \(q\) is the amount of electronic charge, \({R}_{s}\) is the series resistance, \({R}_{p}\) is the parallel resistance, \({N}_{p}\) is the number of parallel cells, and the number of parallel cells is the following: \({N}_{s}\) Indicates the number of batteries in series. The calculation equation of photogenerated current \({I}_{ph}\) is shown in Eq. (17).
where, \({I}_{ph}\) represents the photogenerated current, \(G\) represents the actual light intensity, \({G}_{n}\) represents the nominal light intensity, \({I}_{scr}\) represents the short circuit current under nominal conditions, and \({k}_{i}\) represents the current temperature coefficient.
The engineering application of MPPT is a dynamic optimization problem. The photovoltaic system obtains the best operating point by calling the optimization algorithm component to improve the efficiency of the system. The optimization algorithm uses online learning programming to output the global optimal solution for the next time based on the information state of the system at the current time. The workflow of the MPPT online learning optimization component is shown in Fig. 10.

Online algorithm workflow.
Figure 10 shows that the algorithm calculates the fitness value of the individual at the current time by updating the system dynamic parameter information, and outputs the best operating point information at the next time for the system. A period of time is discretized into enough time periods, and each time period can be approximately regarded as a moment. Finally, the algorithm decided to update the solution vector iteratively according to the system running time. The actual application effect of BDBO algorithm is shown in Fig. 11.

BDBO output power change curve.
The simulation results show that the BDBO algorithm can control the maximum power output stably when the light intensity changes. The ultimate power data and the index ranking of sensitivity and stability of the three algorithms are studied and counted, and the final results are shown in Table 12.
The smaller the ranking value, the better the performance of the algorithm. According to Table 10, the output power of BDBO in the application environment reaches up to 32,14, which has a significant advantage over the other two algorithms, indicating that BDBO algorithm has stronger adaptability to the change of environmental factors. The experimental results show that the stability of BDBO algorithm is poor, but the comprehensive performance is good. The comparative experimental results of the three algorithms are shown in Fig. 12.

Comparison of output power change curves.
The fluctuation degree of the output power change curve under the application of PSO and GSA algorithms is low, but the saturation degree of the curve is also low, indicating that the algorithm falls into the local optimal solution. The output power saturation degree of BDBO algorithm is obviously higher, and the final output power exceeds 30W, far exceeding the limit output power of PSO algorithm and GSA algorithm. Therefore, BDBO algorithm has better effect in engineering application, higher adaptability and sensitivity, and the proposed BDBO algorithm has practical application value.
Conclusion
A balanced BDBO algorithm is proposed, which effectively balances the exploration and exploitation capabilities of DBO algorithm by reducing the randomness of parameters and enhancing the exploration ability of the algorithm, and improves the convergence accuracy and escape ability of the algorithm. The experimental results of CEC-2017 benchmark function show that the convergence accuracy of BDBO algorithm is higher than that of DBO, FA, PSO, CSA and FWA algorithms. From the convergence curve, it can be seen that the exploration ability and escape ability of BDBO algorithm are significantly improved, and it has significant advantages over QHDBO and IDBO variant algorithms in terms of convergence speed and accuracy. In addition, the results of Wilcoxon rank sum test show that all strategy variants have significant advantages over the original DBO algorithm, and the P values are basically less than 0.05, which is statistically significant. For MPPT engineering application problems, BDBO algorithm performs well, and the optimization effect is obviously better than PSO and GSA algorithm, which verifies the optimization performance and practical application value of BDBO algorithm. The parameters R and \(\beta\) of the original algorithm are optimized and adjusted, which provides a new idea for the improvement of DBO algorithm. In the future research, the stability of BDBO algorithm, the sensitivity to random parameters and the improvement of its computational complexity will further improve its optimization performance, making the algorithm better suitable for large-scale optimization problems with complexity. In addition, the performance of the algorithm is verified by MPPT application, which proves that the BDBO algorithm is suitable for complex engineering applications and can be further studied.
Data availability
The data supporting the findings of this study are available in ScienceDB at https://doi.org/https://doi.org/10.57760/sciencedb.13340.
References
Mavrovouniotis, M., Li, C. & Yang, S. A survey of swarm intelligence for dynamic optimization: Algorithms and applications. Swarm Evol. Comput. 33, 1–17 (2017).
Wang, C. & Dong, Y. Feature selection and text clustering based on binary grey wolf optimization. Comput. Eng. Des. 42(9), 2526–2535 (2021).
Cuevas, E., Cienfuegos, M., Zaldívar, D. & Pérez-Cisneros, M. A swarm optimization algorithm inspired in the behavior of the social-spider. Expert Syst. Appl. 40(16), 6374–6384 (2013).
Cuevas-Jiménez, E., Cuevas, E., López, J., Díaz-Cortés, M. A. & Zaldívar, D. Integration of metaheuristic operators through unstructured evolutive game theory approach: a novel hybrid methodology. Evol. Intel. 18(1), 11 (2024).
Xue, J. & Shen, B. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J Supercomput. 79(11), 7305–7336 (2023).
A. Faramarzi, M. Heidarinejad, B. Stephens, and S. Mirjalili, “Equilibrium optimizer: A novel optimization algorithm,” Knowl.-Based Syst. 191, Article ID 105190, 2020.
Rezaee-Jordehi, A. Particle swarm optimisation for dynamic optimisation problems: A review. Neural Comput. Appl. 25(7), 1507–1516 (2014).
Mirjalili, S. et al. Salp swarm algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 114, 163–191 (2017).
Deng, L., Yang, P. and Liu, W.. An improved genetic algorithm. In 2019 IEEE 5th International Conference on Computer and Communications (ICCC), Chengdu, China, 2019, pp. 47–51.
Jiachen, H., Li-hui, F. Robot path planning based on improved dung beetle optimizer algorithm. J. Braz. Soc. Mech. Sci. Eng., 46(2), Article 235, pp. 1–18 (2024).
Xiao, Y., Cui, H., Hussien, A. G. and Hashim, F. A. MSAO: A multi-strategy boosted snow ablation optimizer for global optimization and real-world engineering applications. Adv. Eng. Inform. 61, Art. no. 102464 (2024).
Adegboye, O. R., Feda, A. K., Ojekemi, O. R., Bonah, E. A., Khan, B. and Kamel, S. DGS-SCSO: Enhancing sand cat swarm optimization with dynamic pinhole imaging and golden sine algorithm for improved numerical optimization performance. Sci. Rep. 14(1), Art. no. 1491, (2024).
Nyan, N. F., Ahmad, M. A. & Hekimoglu, B. Optimal PID controller for the DC–DC buck converter using the improved sine cosine algorithm. Results Control Optim. 14, 1–19 (2024).
Adegboye, O. R. & Ulker, E. D. Gaussian mutation specular reflection learning with local escaping operator based artificial electric field algorithm and its engineering application. Appl. Sci. 13(7), 4157 (2023).
Cuevas, E., Echavarría, A. & Ramírez-Ortegón, M. A. An optimization algorithm inspired by the states of matter that improves the balance between exploration and exploitation. Appl. Intell. 40, 256–272 (2014).
Cao, D. et al. An enhanced whale optimization algorithm with improved dynamic opposite learning and adaptive inertia weight strategy. Complex Intell. Syst. 9, 767–795 (2023).
Zhao, Z., Wang, M., Liu, Y. & Zhang, J. A modified shuffled frog leaping algorithm with inertia weight. Sci. Rep. 14(1), 4146 (2024).
Cuevas, E., Vásquez, M., Avila, K., González, A. & Camarena, O. Balancing individual and collective strategies: A new approach in metaheuristic optimization. Math. Comput. Simul. 227, 322–346 (2024).
Ram, J. P. & Rajasekar, N. A novel flower pollination based global maximum power point method for solar maximum power point tracking. IEEE Trans. Power Electron. 32(11), 8486–8499 (2017).
Adegboye, O. R. & Ulker, E. D. Hybrid artificial electric field employing cuckoo search algorithm with refraction learning for engineering optimization problems. Sci. Rep. 13, 4098 (2023).
Singh, G. K. Solar power generation by PV (photovoltaic) technology: A review. Energy 53, 1–13 (2013).
Guo, Y., Sun, Q. & Liu, H. Key design points for improving the economy of photovoltaic power generation (in Chinese). Forum Petrol. Sci. Technol. 43(1), 66–70 (2024).
Ren, Z. & Mao, Y. MPPT control of photovoltaic multi-peak based on improved slime mold algorithm. Acta Energiae Solaris Sinica 45(2), 421–428 (2024).
Akhter, M. N., Mekhilef, S., Mokhlis, H. & Shah, N. M. Review on forecasting of photovoltaic power generation based on machine learning and metaheuristic techniques. IET Renew. Power Gener. 13(7), 1009–1023 (2019).
Niu, Y. G., Yan, G. W., Xie, G., et al. Research on knowledge-based genetic algorithms. J.Taiyuan Univ. Technol. 42(2), 121–125 (2011) [in Chinese].
Fei, Y. Research on the hazard assessment method of hydraulic environmental geological disasters based on differential evolution algorithm. Environ. Sci. Manag. 48(12), 190–194 (2023).
Kennedy, J., and Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, vol. 4, pp. 1942–1948, 1995.
Mirjalili, S., Mirjalili, S. M. & Yang, X. S. Binary bat algorithm. Neural Comput. Appl. 25(3–4), 663–681 (2014).
Mirjalili, S., Mirjalili, S. M. & Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 69, 46–61 (2014).
Rutenbar, R. A. Simulated annealing algorithms: An overview. IEEE Circuits Devices Mag 5(1), 19–26 (1989).
Rashedi, E., Nezamabadi-Pour, H. & Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci 179(13), 2232–2248 (2009).
Hashim, F. A., Houssein, E. H., Mabrouk, M. S., Al-Atabany, W. & Mirjalili, S. Henry gas solubility optimization: A novel physics-based algorithm. Future Gener. Comput. Syst. 101, 646–667 (2019).
Ding, Q. & Yin, X. Summary of differential evolution algorithm. J. Intell. Syst. 12(4), 431–442 (2017).
Hao, D. et al. Solar energy harvesting technologies for PV self-powered applications: A comprehensive review. Renew. Energy 188, 678–697 (2022).
Shen, Q., Zhang, D., Xie, M. & He, Q. Multi-strategy enhanced dung beetle optimizer and its application in three-dimensional UAV path planning. Symmetry 15(7), 1432 (2023).
Karafotias, G., Hoogendoorn, M. & Eiben, A. E. Parameter control in evolutionary algorithms: Trends and challenges. IEEE Trans. Evol. Comput 19(2), 167–187 (2015).
Huang, J., Wang, W., Wen, C. & Li, G. Adaptive event-triggered control of nonlinear systems with controller and parameter estimator triggering. IEEE Trans. Autom. Control 65(1), 318–324 (2020).
Gu, Y., Lu, H., Xiang, L. & Shen, W. Adaptive simplified chicken swarm optimization based on inverted S-shaped inertia weight. Chin. J. Electron. 31(2), 386–394 (2022).
Dong, X. et al. Dynamical hyperparameter optimization via deep reinforcement learning in tracking. IEEE Trans. Pattern Anal. Mach. Intell. 43(5), 1515–1529 (2021).
dos Santos Coelho, L. Gaussian quantum-behaved particle swarm optimization approaches for constrained engineering design problems. Expert Syst. Appl. 37(2), 1676–1683 (2010).
Wang, G. G. Moth search algorithm: A bio-inspired metaheuristic algorithm for global optimization problems. Memetic Comput. 10(2), 151–164 (2018).
Gandomi, A. H., Yang, X.-S. & Alavi, A. H. Cuckoo search algorithm: A metaheuristic approach to solve structural optimization problems. Eng. Comput. 29(1), 17–35 (2013).
Zhang, Y. et al. Boosted binary Harris hawks optimizer and feature selection. Eng. Comput. 37(2), 3741–3770 (2021).
Hakli, H. & Uguz, H. A novel particle swarm optimization algorithm with Lévy flight. Appl. Soft Comput. 23, 333–345 (2014).
Gandomi, A. H., Yang, X.-S., Talatahari, S. & Alavi, A. H. Firefly algorithm with chaos. Commun. Nonlinear Sci. Numer. Simul. 18(1), 89–98 (2013).
Marini, F. and Walczak, B. Particle swarm optimization (PSO): A tutorial. Chemometrics and Intelligent Laboratory Systems, vol. 149, part B, pp. 153–165 (2015).
Yang, X.-S. & Deb, S. Cuckoo search: Recent advances and applications. Neural Comput. Appl. 24(1), 169–174 (2014).
Chen, M. and Tan, Y. SF-FWA: A self-adaptive fast fireworks algorithm for effective large-scale optimization. Swarm Evol. Comput. vol. 80, ID 101314 (2023).
Zhu, F. et al. Dung beetle optimization algorithm based on quantum computing and multi-strategy fusion for solving engineering problems. Expert Syst. Appl. 236, 121219 (2024).
Pan, J., Li, S., Zhou, P., Wang, L. & Zhang, Y. Modified sine algorithm-guided dung beetle optimization algorithm. Comput. Eng. Appl. 59(12), 1–21 (2023) ([in Chinese]).
García, S., Molina, D., Lozano, M. & Herrera, F. A study on the use of non-parametric tests for analyzing the evolutionary algorithms’ behaviour: A case study on the CEC’2005 Special Session on Real Parameter Optimization. J. Heurist. 15(6), 617–644 (2009).
Zhou, Y., He, Y. & Xing, Z. Power transformer vibration signal prediction based on IDBO-ARIMA. J. Electro. Meas. Instrum. 37(8), 11–20 (2023).
Zhu, Z. Y. & Zheng, C. Y. Ship power system network reconstruction based on chaos adaptive differential evolution algorithm. J. Jiangsu Univ. Sci. Technol. (Natural Science) 27(2), 154–158 (2013).
Acknowledgements
This work is supported by the Undergraduate Research and Innovation Fund of Anhui University of Finance and Economics (XSKY24227).
Author information
Authors and Affiliations
Contributions
All authors wrote the text of the manuscript and CH.T drew all the images. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Tian, CX., Li, YX. Balanced dung beetle optimization algorithm based on parameter substitution and escape strategy. Sci Rep 15, 2348 (2025). https://doi.org/10.1038/s41598-025-86264-9
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-86264-9
Keywords
This article is cited by
-
An Improved Machine Learning Model for Screening and Activity Prediction of Receptor Tyrosine Kinase
Journal of Bionic Engineering (2025)
