
Abstract
The Chang’E-6 (CE-6) mission’s first lunar farside samples return advances understanding of lunar evolution. This achievement highlights the necessity of rapid landing-trajectory reconstruction and precise landing-site characterization for mission execution. We present an intelligent vision-guided framework for lunar exploration, demonstrating that high-fidelity trajectory reconstruction can simultaneously enhance landing site localization accuracy and geological analysis precision. Our approach integrates: high-precision trajectory reconstruction from descent imagery, rapid localization utilizing deep learning-enhanced landmark matching achieving 0.90 m landing-site accuracy for Chang’E-6, and physically constrained geological analysis with visual rectification. By correcting camera distortions via pose parameters, we improve crater morphometry and surface age dating through orthorectified CSFD measurements. Our results reveal late-stage volcanism ( ~ 855 Ma) in Apollo crater ejecta, challenging early farside magmatic cessation models. Furthermore, we identify pristine anorthosite-pyroxene assemblages critical for probing lunar mantle differentiation. This work establishes an intelligent vision-guided approach to computational photogrammetry for extraterrestrial sample-return missions.
Similar content being viewed by others


Introduction
Since the Apollo era, spacecraft landings on the Moon and subsequent sample retrievals have played a pivotal role in advancing our understanding of lunar geology, the Moon’s formation, and its evolutionary history. The Chang’E-6 mission, launched by China, represents a groundbreaking achievement in lunar exploration. On June 2, 2024, it became the first mission to successfully land on the farside of the Moon, specifically in the enigmatic South Pole-Aitken (SPA) basin. This region, known for its vast expanse, distinctive topography, and anomalous internal composition1,2, offers an unparalleled opportunity to study the Moon’s geological history and assess its resource prospects. A key element of all lunar science missions, including Chang’E-6, is the rapid reconstruction of the landing trajectory and precise localization of the landing site, which are pivotal to maximizing the scientific return from such pioneering efforts. These processes enable improved spacecraft localization and mission planning for future lunar exploration, and accurate correlation of collected samples with lunar geological features.
Spacecraft landing processes are characterized by high velocity and significant signal transmission latency, which precludes the adoption of real-time positioning methods during descent3. Instead, post-landing positioning is typically performed through retrospective analysis of landing camera data. Traditional methods, including radio tracking4 and real-time telemetry5, have been widely employed for descent trajectory reconstruction and landing site determination. However, radio tracking results and telemetry data do not directly provide knowledge about the visually observed landing area, limiting their utility for attributing spacecraft maneuvers and conducting detailed topographic analysis of the precise landing zone. In contrast, vision-guided techniques offer the potential to bridge this gap by providing critical pose information for each frame captured by the lander’s camera. This capability enables both geometric distortion correction and spatial resolution calculation in descent imagery, yielding high-precision lunar orthophotos with scale information. One of the core methodological innovations of our approach lies in the synergistic calibration of geological analysis inputs using landing-phase navigation data (position and orientation parameters), thereby establishing a vision-based paradigm for lunar surface geological analysis.
High-resolution images, particularly those captured at close range, are crucial for geological analysis because they enable detailed observations of mineral particles and rock fragments, as well as fine morphological features and surface textures of typical geological structures6. In contrast, earlier studies based on lower-resolution orbital imagery, including data from the Lunar Reconnaissance Orbiter (LRO) Wide Angle Camera (WAC) with a resolution of approximately 100 meters per pixel (m/px)7, were limited in discerning key features such as crater rim sharpness and wall erosion. Furthermore, the absence of precise physical corrections further hindered quantitative interpretations8, notably in determining surface ages using crater size-frequency distribution (CSFD) measurements9.
Precise localization and accurate geological feature correction share identical technical prerequisites, being equally contingent upon robust trajectory reconstruction and visual positioning systems. Nevertheless, existing vision-based approaches confront critical limitations: positioning accuracy, terrain data dependency, and manual intervention requirements, which fundamentally constrain their operational performance. Current vision-based landing site localization methods predominantly fall into two categories. The first paradigm formulates the problem as an image matching task10,11, wherein: (1) a descent image with resolution comparable to the reference map is selected, (2) a region-of-interest containing the landing site is identified through image-map registration, and (3) the landing site coordinates are progressively transferred from the final descent image through successively higher-altitude descent frames before being finally projected to the reference map. The second approach12 employs photogrammetric techniques to: (1) reconstruct topographic maps from both landing and navigation camera imagery, and (2) determine the final landing position through geometric transformation based on the known spatial relationship between the navigation camera and lander. The localization accuracy is often hindered by cumulative errors in image-based homography approaches10,11,13. These errors can be mitigated by employing bundle adjustment techniques14, which minimize reprojection errors and optimize the geometric alignment between descent image sequences and Digital Orthophoto Map (DOM) frames. While previous photogrammetric approaches sometimes incorporated multi-source image data (e.g., navigation or panoramic cameras)12, such auxiliary data were primarily used for verification and detailed topographic analysis rather than for the core localization process itself. In contrast, our framework achieves precise landing site localization using only descent imagery and high-resolution DOM data, thereby eliminating dependence on additional sensors. This single-source design enhances autonomy and efficiency under data-limited conditions but also requires robust algorithms to manage the computational complexity arising from large-scale DOM processing. Moreover, existing approaches often involve manual intervention, such as determining projection transformations11,13 or manually selecting control points for coordinate alignment12, which introduces instability and inconsistency. Therefore, an intelligent, automated, and efficient solution is essential.
To address these technical challenges, this study proposes an intelligent vision-based analytical system that integrates three core modules: trajectory reconstruction, sub-meter landing site localization (achieving 0.90 m accuracy for Chang’E-6), and physics-constrained geological analysis, thereby establishing an innovative solution framework. The proposed system employs an altitude-aware keyframe optimization algorithm to transform complex sequence-to-sequence matching problems into optimized frame-to-sequence matching processes, achieving rapid localization in under 30 minutes while maintaining superior generalization capability. The term “sequence-to-sequence” specifically refers to the sequence of descent images (Chang’E-6, 2,352 pixels × 1,728 pixels, 630 frames), and the sequence of small-area DOMs (Chang’E-6, 2,048 pixels × 2,048 pixels, 516 frames) obtained by segmenting large-area DOM. Regarding “frame-to-sequence”, the “frame” denotes individual frames from the descent imagery that share comparable physical resolution with the DOM. Most critically, the intermediate pose and scale parameters derived from descent reconstruction enable pixel-level geometric rectification of landing imagery, effectively resolving two fundamental limitations of conventional methods: (1) systematic crater deformation that previously compromised reliable lunar surface chronology analysis, and (2) inability to acquire high-resolution dimensional measurements of Apollo crater ejecta deposits. The dual-application paradigm of landing data that serves both engineering positioning and scientific exploration represents a groundbreaking advancement in lunar exploration methodologies. Validated through the Chang’E-3/4/5/6 missions, this framework demonstrates that intelligent vision-guided technology provides essential support and scientific insights for current and future planetary exploration missions, with transformative implications for advancing planetary exploration engineering and comparative planetology research.
Furthermore, enabled by vision-guided geometric correction of descent imagery, the geological analysis revealed compelling evidence of relatively young volcanic activity and crustal excavation in the CE-6 landing region. Crater size-frequency distribution (CSFD) measurements indicated a surface age of approximately 855 Ma, significantly younger than previously expected. Mineralogical observations further suggest exposure of plagioclase-rich and pyroxene-bearing rocks, likely excavated from deeper layers. These results challenge the traditional view of early farside volcanic cessation, offering new insights into the Moon’s prolonged magmatic and crustal evolution.
Results
Intelligent vision-guided framework
The overall analytical framework and key results of this study are presented in Fig. 1. The framework integrates vision-guided trajectory reconstruction, landing site localization, and geological analysis, demonstrating its applicability and effectiveness in advancing lunar science. Figure 1a illustrates the carefully orchestrated descent of the Chang’E-6 lander, highlighting the critical role of precision in ensuring mission success. The descent began with the lander’s controlled entry into the lunar environment, followed by a sequence of meticulously planned altitude reductions and attitude adjustments. These maneuvers facilitated a smooth and safe approach to the target landing site. By maintaining a shallow descent angle, the spacecraft avoided large obstacles and uneven terrain, showcasing an effective strategy for mitigating landing risks in challenging environments.

From top to bottom, the panels respectively depict: a schematic of the Chang’E-6 landing, the framework of the landing-site localization method, the localization results, and the geological analysis results. a The landing process of the Chang’E-6 lander. b The proposed trajectory reconstruction and landing site localization method for Chang’E-6, which comprises four key modules. The data sources for this framework include image sequences captured by the descent camera and lunar surface images (DOM) taken by orbiting satellites. b1 Selection of key frames from the descent image sequence, b2 Determining small-area DOM, b3 Coarse localization, b4 Fine localization. c Visualization of the validation results of the proposed method on other Chang’E series missions. d Geological analysis based on the precise localization of the landing site and descent images. The DOM images and lunar circular maps are sourced from the LROC website, with details provided in the Data Availability section.
Figure 1b outlines the intelligent vision-guided workflow for trajectory reconstruction and landing site localization. This process leverages visual data captured during the descent and employs advanced algorithms to achieve precise localization. The detailed methodology is presented in Section Methods. The workflow can be systematically summarized into four key stages: (1) Key Frame Selection: Automatically extracting representative frames from the descent image sequence based on altitude and visual content. (2) DOM Identification: For the first time, a deep learning-based Matching Cascading Network is utilized to align key frames of descent imagery with segmented Lunar Reconnaissance Orbiter Camera (LROC) DOM sequences, thereby identifying a small-area DOM frame for coarse localization. (3) Coarse Localization: Aligning the descent image key frames and the small-area DOM, and determining the approximate landing area through the propagation of homography between descent sequence frames. (4) Fine Localization: Optimizing the matching results by descent sequence information to determine the landing point coordinates with higher accuracy.
Figure 1c compares reconstructed descent trajectories and landing site coordinates for Chang’E-3, Chang’E-4, Chang’E-5, and Chang’E-6 missions, underscoring the framework’s versatility and reliability. The visual data not only validate the method but also offer insights into spacecraft maneuvers, such as attitude adjustments and trajectory corrections. For instance, the Chang’E-6 lander performed critical attitude adjustments at 240 m and a 20-meter retreat at 100 m, effectively avoiding hazardous terrain and ensuring a safe touchdown. These findings highlight the framework’s capacity to analyze and interpret spacecraft descent dynamics in detail.
This study pioneers a higher-precision vision-based quantitative geological analysis methodology that fundamentally relies on orthorectification of landing imagery and accurate determination of physical resolution, the core of which lies in the precision of landing process reconstruction. Following trajectory reconstruction within our framework, the lunar surface normal direction was standardized using free-fall trajectory constraints, thereby enabling orthorectification of landing images. Furthermore, through dimensional scaling from LROC DOM with known physical resolution to descent images, this study established more precise dimensional parameters for descent imagery. This integrated approach enables detailed multi-scale geological analysis of the landing area with unprecedented accuracy. As illustrated in Fig. 1d, this approach seamlessly bridges macro- and micro-scale investigations. The macro-scale investigation utilizes landing images with a coverage area larger than 1000 m × 1000 m and a spatial resolution coarser than 0.1 m/px. These images are primarily used for geological dating based on CSFD. The micro-scale investigation employs landing images with a coverage area smaller than 500 m × 500 m and a spatial resolution finer than 0.05 m/px. The highest resolution can reach the millimeter level (on the order of ~0.001 m/px), which is used for the analysis of lunar regolith particles. At the macro scale, geological units surrounding the Apollo impact crater were examined, and CSFD dating of volcanic activity on the lunar farside was performed. These analyses offer renewed perspectives on the Moon’s evolutionary history. At the micro scale, high-resolution imagery enabled quantitative assessments of features proximal to the landing site, including impact craters, rocks, and soil particles, shedding light on the region’s geological processes.
By combining vision-guided trajectory reconstruction with high-resolution image calibration, this framework establishes a new way for precision in lunar exploration and geological discovery, advancing our understanding of both large-scale lunar evolution and localized surface dynamics.
Dataset construction
To validate the robustness and broad applicability of the proposed localization framework, we constructed the Chang’E Landing Site Localization Dataset (CELSLD) that includes descent images and corresponding LROC DOMs for the Chang’E-3, Chang’E-4, Chang’E-5 and Chang’E-6 missions. CELSLD comprises 17,796 images, including 17,792 descent images and 4 landing site LROC DOMs.
For the Chang’E-6 landing site localization task, this study employed 630 descent images with 2352 × 1728 pixels and an LROC DOM measuring 10,530 × 54,462 pixels at a spatial resolution of 1.12 m/px. CELSLD also includes descent images and corresponding LROC DOMs for the Chang’E-3, Chang’E-4, and Chang’E-5 missions. The descent images include 4672 images from the Chang’E-3 mission15, 10,882 images from the Chang’E-4 mission16, 1608 images from the Chang’E-5 mission17. The spatial dimensions of the descent images acquired during the Chang’E-3, Chang’E-4, and Chang’E-5 missions are 1024 × 1024, 1024 × 1024, and 2352 × 1728 pixels, respectively. The LROC DOMs for these missions exhibit dimensions of 8850 × 54,257, 7800 × 19,627, and 46,591 × 53,933 pixels, corresponding to physical resolutions of 1.13 m/px, 1.40 m/px, and 1.20 m/px, respectively.
Precise landing site localization, descent trajectory construction, and maneuvering process analysis of Chang’E-6
On June 2, 2024, shortly after the successful landing of Chang’E-6, we employed descent image sequences and LROC DOMs to locate the landing site. Within half an hour, the coordinates were determined to be 206.0142∘E and 41.6359∘S.
As illustrated in Fig. 1, this study leverages large-area LROC DOMs and descent image sequences as inputs. The input LROC DOM of Chang’E-6 measures 10,530 × 54,462 pixels (segmented into 516 frames of small-area DOM sequences at 2048 × 2048 resolution), while the descent image sequence encompasses 630 frames captured by the landing camera. Determining the correspondence between heterogeneous image sequences through exhaustive pairwise matching would result in O(n2) computational complexity. To address this issue, we incorporate the reconstructed descent trajectory as a physical constraint, reducing complexity to O(n). The visual variation information within the descent image sequence inherently encodes the lander’s motion characteristics. Through trajectory reconstruction, these motion parameters enable the derivation of both acquisition altitude and image resolution for the descent imagery. This process generates descent images at DOM-equivalent physical resolution, thereby transforming the computationally intensive sequence-to-sequence exhaustive matching into a more efficient frame-to-sequence matching paradigm.
Figure 2 illustrates the reconstructed trajectory of Chang’E-6, which moved from east to west, before descending vertically to land on the Moon. Notably, the eastern part of the reconstructed trajectory features a distinct group of craters, as marked in Fig. 2b. After computing the landing site, marked as the red cross in Fig. 2c, the craters were also identifiable in the neighboring area of the landing site on the LRO Narrow Angle Camera (NAC) image, which qualitatively demonstrates the accuracy of our trajectory reconstruction method. According to the reconstructed trajectories, Chang’E-6 underwent two significant orientation maneuvers during its descent phase. Initially, as shown by the red line in Fig. 2d, Chang’E-6 approached the landing point in a tilted direction to the ground. Above the area of Fig. 2f, at a height of about 240 m, the lander transitioned from an original inclined posture to a more vertical orientation, as evidenced by the change in camera perspective changed from Fig. 2g to Fig. 2e. Although some tilt remained in Fig. 2e, it was significantly reduced compared to Fig. 2g. Upon reaching the designated landing site (Fig. 2h), the lander adjusted to be perpendicular to the ground, subsequently reducing its speed for a controlled landing. Figure 2i provides an enlarged view of the final descent phase, wherein the lander was searching for a flat area as the landing zone while descending. Descent images indicate that at the westernmost point of the trajectory, the lander hovered at a height of approximately 100 m to adjust its orientation, ensuring it was close to vertical with the ground. As depicted in Fig. 2i, the region beneath the westernmost point of the trajectory is characterized by a high density of craters, rendering it unsuitable for landing. Consequently, the Chang’E-6 mission opted for a relatively flat region located between two craters to the east. Following a retreat of 23.5 m, the lander executed a lateral translation during its descent, approaching the designated landing site at an angle of approximately 134.8 degrees relative to its original trajectory, ultimately achieving a safe landing. As shown in Fig. 2j, the projected DOM region reveals that Chang’E-6 successfully landed on a relatively flat area of the lunar surface. Figure 2k, l present comparative views cropped from LROC DOMs acquired before and after the landing event.

The upper section presents the visualization and analysis of the reconstructed trajectory, while the lower section shows the Chang’E-6 landing-site localization results, from a global to a local view, along with the corresponding mapping of the results. a The reconstructed trajectory of the frames sampled from the complete descent image sequence. b The computed 3D scene. c Chang’E-6 landing zone captured from LROC quick-map website (https://quickmap.lroc.asu.edu). The rectangles in b, c represent the same area and the red cross is the landing site. d The reconstructed trajectory using the complete descent image sequence. f, h Enlarged views of regions within d. i Enlarged view of the region in h. Chang’E-6 underwent two significant orientation maneuvers during its descent phase. The first maneuver happened above f, the second above h and each time Chang’E-6 became more vertical to the lunar ground. g, e The camera perspective before and after the first maneuver. i indicates that the autonomous landing system on Chang’E-6 adjusted orientation to ensure safe and precise landing. The black arrow indicates that the lander retreated by 23.5 m, while the angle illustrates that the direction of the lander deviated by 134.8 degrees from its original trajectory. j The projected DOM region. It can be observed that Chang’E-6 landed on the relatively flat region. k, l Cropped images derived from LROC DOMs captured before and after Chang’E-6’s landing. The yellow points represent manually selected matching feature points. The red cross marker in k aligns with the reference point in the original imagery, while the red cross in l is positioned through homography matrix projection calculated from the matched points. The spatial relationship between these markers validates the coordinate transformation accuracy.
As shown in Fig. 2, the proposed methodology achieved precise localization of the Chang’E-6 landing site, attaining 0.90 m positional accuracy through alignment with NAC reference data. This vision-based pipeline requires only two input modalities: (1) raw descent image sequences and (2) pre-existing landing zone orthomosaics. The implementation on an NVIDIA RTX 4090 GPU accelerated the computational workflow, enabling completion of the full processing pipeline from initial image ingestion to final coordinate output within a 30-minute operational window. The detailed error evaluation is described in Methods: Error Evaluation, and additional supporting data can be found in Supplementary Materials B: The Results of Error Evaluation.
Validation of proposed localization framework across the Chang’E lander series
CELSLD (see Dataset preparation in Methods) is used to demonstrate the robustness and general applicability of the proposed method. The experimental results confirm the efficacy of this approach, consistently pinpointing the lander’s position on the DOM with high accuracy (Fig. 3 and Supplementary Fig. 4).

The row a the landing site on the lunar DEM model and the model is available from LROC quick-map website (https://quickmap.lroc.asu.edu). The row b–d Chang’E landing zone on LROC DOM. The red cross is the fine landing site positioning result, the blue cross is the coarse landing site positioning result and the red circle in d is the true lander position, which is characterized with bright light. CE3, CE4, and CE5 are short for Chang’E-3, Chang’E-4 and Chang’E-5.
Figure 3a shows the Chang’E landing sites on the lunar globe. Notably, Chang’E-3 and Chang’E-5 landed on the near side of the Moon, while Chang’E-4 landed on the farside of the Moon. Both Chang’E-4 and Chang’E-6 landed in South Pole-Aitken, with Chang’E-4 positioned in the northwest and Chang’E-6 in the northeast. The precise landing site results are located in the bright area on the LROC DOM (Fig. 3c, d), indicating a good agreement with the actual locations and thereby validating the precision and generalization of our method.
We obtained the landing site position of Chang’E-3, Chang’E-4 and Chang’E-5, respectively, by the proposed coarse-to-fine landing site positioning method. The required data consisted solely of descent images captured by the lander and images captured by LRO NAC. The sub-pixel coordinates of the landing site were calculated from the LRO NAC images and subsequently converted into latitude and longitude according to geological information associated with the LRO NAC images. As illustrated in Fig. 3, the coarse localization results of Chang’E-3, Chang’E-4, and Chang’E-5 are 340.4889°E/44.1117°N, 177.5880°E/45.4561°N, and 308.0841°E/43.0587°N, respectively. The final precise localization results of Chang’E-3, Chang’E-4, and Chang’E-5 are 340.4888°E/44.1206°N, 177.5884°E/45.4561°N, and 308.0855°E/43.0586°N, respectively. The coarse positioning accuracy was primarily affected by two factors: modality mismatches between descent images and orbital maps (accounting for ~10 m error), and iterative homography calculations (~3.7 m error). While these factors dominated the localization errors of Chang’E-3, Chang’E-4, and Chang’E-5, the case of Chang’E-6 required special treatment due to engine plume obscuration. For Chang’E-6 specifically, the plume affected the final descent (last 10 frames below 8.6 m altitude), so the last clear frame at 8.60 m altitude (0.003 m/px resolution) was selected. Using this strategy, the localization achieved 0.90 m positional error through correspondence matching and resolution ratio validation. The same error evaluation method for Chang’E-6 was applied to assess the overall localization error for all Chang’E lander series. The results demonstrate that the proposed fine localization method consistently achieved meter accuracy across all landers.
Figure 4a presents a side view of the reconstructed trajectory, while Fig. 4b provides a top–down view, offering a more intuitive observation of computed 3D scene from trajectory reconstruction results. Figure 4c shows the landing site area captured by LROC. In Fig. 4b, c, corresponding craters with distinct features are marked with orange rectangular boxes, qualitatively confirming the accuracy of computed 3D scene obtained from the trajectory reconstruction, and supporting the precision of the reconstructed trajectory. The reconstructed trajectories demonstrate kinematic congruence with each lander’s documented descent profile, validating trajectory restoration accuracy across heterogeneous mission architectures. Discrepancies in camera orientations (tilted vs. vertical) and approach vectors (east-west vs. vertical) reflect mission-specific guidance protocols while maintaining adherence to reconstructed position parameters.

a The reconstructed trajectory of the frames selected from the complete descent image sequence and b the computed 3D scene. c The landing zone captured from LROC quick-map website (https://quickmap.lroc.asu.edu). The rectangles in b and c represent the same area. a1, b1, c1 are Chang’E-4 trajectory. a2, b2, and c2 are Chang’E-3 trajectory. a3, b3, and c3 are Chang’E-5 trajectory. The linked rectangles represent the same area and the red cross is the landing site. CE3, CE4, and CE5 are short for Chang’E-3, Chang’E-4 and Chang’E-5.
Additionally, utilizing the proposed framework, we obtained the lander’s frame-by-frame altitude, camera pose, and the lunar surface normals derived from the last few frames. This enabled fine orthorectification and physical dimension calculations of the high-resolution landing images. The former corrects shape distortions in craters and rock fragments, improving the accuracy of morphological analysis, while the latter delivers precise measurements of crater diameters, rock dimensions, and soil particle sizes. Together, these advancements enable unprecedented, vision-based quantification of geological analysis, such as age estimations and regolith compositions.
Recent volcanic activity revealed by physical-corrected descent camera images
By leveraging vision-based image correction (see Preprocessing and Metrological Calibration of Landing-Site Imagery for Geological Analysis in Methods), we achieved significantly enhanced accuracy in farside geological analysis. The Chang’E-6 landing site, located between the rim crest and the peak ring of the Apollo basin, sits within a mare patch classified as part of the late-Imbrian unit18 and the Upper Imbrian dark plain19 (Fig. 5a, b). High-resolution images of this region reveal craters ranging from 2.0 to 98.1 m in diameter, categorized into five morphological types (Class A, AB, B, BC, C)20(Fig. 5d–h). Analysis using the Mean 2nd-Closest Neighbour Distance (M2CND) and Standard Deviation of Adjacent Area (SDAA)9 (Supplementary Fig. S2) shows that craters from ~10 to ~70 m in diameter are randomly distributed, making them suitable for CSFD measurements. These measurements yield an estimated absolute model age for this region(1.24 square kilometer) of approximately 855 Ma (Fig. 5i), significantly younger than the 2.44–3.31 Ga age of the Imbrian unit21,22,23. The degradation age of the representative C-type impact crater is 137.5 Ma (Supplementary Table S5), indicating that parts of the surface have experienced relatively recent impact events.

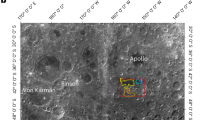
a Regional context of the lunar farside centered at the Chang’E-6 landing site. The Apollo crater is outlined by a black dashed line and the CE-6 landing site is marked by a red star. The basemap uses color hill-shade topographic date from the global mosaic provided by the Lunar Reconnaissance Orbiter Camera (LROC) Wide Angle Camera (WAC) (https://astrogeology.usgs.gov/search/map/moon_lro_lroc_wac_global_morphology_mosaic_100m) and Lunar Orbiter Laser Altimeter (LOLA) (https://astrogeology.usgs.gov/search/map/moon_lro_lo-la_selene_kaguya_tc_dem_merge_60n60s_59m). b Geological units surrounding the Apollo crater. Abbreviations: Ec (Eratosthenian crater unit), Ic (Imbrian lower crater unit), IN (Imbrian-Nectarian unit), Im1 (Imbrian lower mare unit), Im2 (Imbrian upper mare unit), Imd (Imbrian mare dome unit), Io (Imbrian orientale unit), Ip (Imbrian plains unit), N (Nectarian unit), pN (pre-Nectarian unit). c Comparison of crater recognition before and after physical image correction. The left panel shows the original, uncorrected descent image with craters outlined in blue. Due to severe geometric distortion, many craters appear elliptical; two notably deformed examples are enlarged below. The right panel displays the corrected image, where crater shapes are restored and all identified craters are marked in yellow. The lower insets demonstrate the improved circular morphology after correction for the same two craters. d–h Representative craters with varying morphological prominence used for degradation analysis. Craters are categorized into five types (A, AB, B, BC, C) following the method established by Basilevsky20. i The CSFD results for the study area. j–m Images taken at varying descent heights from 110.99 to 0.4 m, showing the Chang’E-6 lander adjacent to a recently formed crater ~ 3.5 m in diameter (marked by the white dashed circle in k). l Distribution of rocks ejected from the crater, with rocks indicated by yellow arrows and the direction of fluttering caused by rocket exhaust shown by dashed black arrows. m A close-up image taken after landing on the lunar surface, highlighting several rocks and a collapse caused by the lander. n–r Enlarged views of representative rocks from c& d. These rocks, with distinct borders and bright surfaces, are likely composed of Ca- and Al-rich plagioclase, as their silicate structure enhances reflectivity compared to the Fe-rich minerals like ilmenite in the surrounding lunar regolith. s A closer shot of the lunar soils, with particle sizes ranging from less than 1 pixel (<17.6 μm) to 49 pixels ( ~ 862.4 μm) in diameter based on the image resolution.
Crucially, the application of physical image correction significantly improved the accuracy of CSFD analysis. In the original, uncorrected descent images, severe geometric distortion caused impact craters to appear elliptical rather than circular (Fig. 5c), compromising the reliability of diameter measurements essential for crater size-frequency statistics. As a result, surface age estimates derived from these distorted images were invalid (Supplementary Fig. S3). Only after applying image calibration were we able to restore the true circular morphology of craters and obtain meaningful and consistent age estimations, underscoring the indispensable role of geometric correction in enabling accurate geological dating. We have also applied the CSFD measurements to physically corrected descent images from Chang’E-5 (Supplementary Fig. S4), and obtained an age of around 454 Ma for the landing area, which is younger than the previous CSFD estimates24,25. Together with the discovery of ~ 123 Ma volcanic glass beads in the Chang’E-5 samples26, these findings suggest that both the crater population and the glass beads preserve records of relatively recent surface processes that have not been fully captured in earlier studies. This discrepancy in age estimates can be attributed to previous methodologies that assessed larger areas using lower-resolution images and craters exceeding 1km in diameter. Smaller craters, often obscured by resurfacing processes like thin lava flows, may not have been accounted for in previous studies. Given most craters in our study area are under 150 m in size, our dating results reflect localized emplacement or resurfacing events, indicating recent volcanic activities on the lunar farside during this period. This challenges the previous notion that volcanism on the lunar farside ceased much earlier (1.8–2.2 Ga)23,27 than on the nearside (1.0-2.0 Ga)28,29,30. Our findings, combined with the recent report of volcanic glass beads (~123 Ma) from Chang’E-5 samples26, demonstrate that the Moon may have experienced more prolonged and complex magmatic processes than previously understood.
Morphological and mineralogical evidence for potential lower crustal and mantle-derived materials
Building on precise altitude estimation and physical scale calibration, our analysis enables detailed quantification of surface regolith particles and rock fragments at the landing site. The Chang’E-6 descent camera images also provide compelling evidence for the exposure of deeper lunar materials based on the surface mineralogical features. The lander was next to a small crater approximately 3.5 m in diameter (Fig. 5j, k). Images captured at the landing site (Fig. 5l, m) clearly show several small rocks with straight edges and distinct contours, measuring ~ 1.21–5.73 cm in size (Fig. 5n–r). These scattered small rocks may have originated from a recent impact event, as indicated by their distribution along the ejection path centered around the impact crater (Fig. 5k). The surfaces of these small rocks exhibit greater reflectivity than the surrounding lunar regolith, suggesting that they are composed of minerals with different optical properties, likely plagioclase rich in Ca and Al. Moreover, image analysis of the lunar soil particles and rock fragments reveals a size range from less than 1 pixel (<17.6 μm) to 49 pixels (~862.4 μm) in diameter, depending on the photo resolution (Fig. 5s). These larger particles contrast with the lunar soil samples collected by Chang’E-5, which had a size range from 0.4 to 73.9 μm31. The presence of larger and coarser mineral components in Chang’E-6 samples suggests elevated concentrations of pyroxene or olivine due to their being more resistant to weathering than plagioclase and other felsic minerals32. Based on the above analysis, the soil compositions near the landing site could be a mixture of anorthite and Mg-suite rocks, potentially originating from the lower crust or upper mantle33,34. Our findings support the hypothesis that the Apollo impact event may have penetrated the thinner farside crust35, excavating materials from both the lower crust and potentially the upper mantle36,37. However, given the limitations of the available data from the Chang’E-6 lander, further spectral analyses and laboratory investigations of Chang’E-6 samples will be essential for providing more definitive insights into the composition and origins of the materials excavated by the Apollo impact.
In conclusion, the application of vision-guided geometric correction proves to be critical in unlocking the geological secrets of the lunar farside. The Chang’E-6 mission provides groundbreaking insights into the lunar farside’s geology through high-resolution descent camera imagery. Analysis of craters in the Chang’E-6 landing area reveals a surprisingly young absolute model age of approximately 855 Ma, challenging prior assumptions of early cessation of farside volcanism. Additionally, images captured at the Chang’E-6 landing site offer compelling evidence of deep crustal excavation. These discoveries not only extend the timeline of lunar volcanism but also provide a rare opportunity to study the Moon’s internal composition and crustal dynamics.
Methods
This study introduces a novel lunar landing localization framework that, for the first time, integrates deep learning into the localization pipeline. By eliminating the reliance on manually selected control points and multi-source imagery (e.g., navigation or panoramic cameras), the proposed approach reduces computational complexity while maintaining high precision. Operating solely on descent imagery and a high-resolution reference map, the method delivers fully autonomous, timely, and robust localization, thereby providing a scalable paradigm for future extraterrestrial landing missions.
This section delineates the procedural workflow and technical specifications of the proposed framework, systematically organized into eight subsections: (1) Determination of descent image keyframes, (2) Identification of target small-area DOM, (3) Coarse landing site positioning, (4) Fine landing site positioning, (5) Preprocessing and metrological calibration of landing-site imagery for geological analysis, (6) Crater size-frequency distribution measurement, (7) Crater classifications and degradation age estimation, and (8) Error evaluation. The framework processes two primary inputs: the complete descent image sequence and large-scale base maps, and integrates raw descent imagery and large-scale base maps into a unified processing chain that successively refines landing-site localization and prepares orthorectified data for geological analysis, establishing an integrated processing chain from raw sensor data to scientific products
Determination of descent image keyframes
Considering the numerous redundant descent frames, our method dynamically adjusts sampling intervals by evaluating image structural similarity, shortening them when similarity falls below a set threshold to optimize the process. The adaptive frame sampling method uses structural similarity index (SSIM)38 as the similarity measurement metric, which is defined in Eq. (1):
where x and y denote consecutive image signals, and l, c and s represent luminance, contrast, and structure. Luminance is primarily represented by the mean, contrast is primarily represented by the variance, and structure is mainly represented by both variance and covariance. The adaptive frame sampling method effectively saves computational resources while ensuring the accuracy of trajectory reconstruction and key frame selection from descent images. Implementation details and experimental results are provided in the Supplementary Material H.
After obtaining the descent images and DOM, a critical challenge lies in addressing the physical resolution differences between them. In this study, the physical resolution of each descent frame is computed using the estimated height and camera parameters. The descent image sequence, filtered via SSIM, is then used for trajectory reconstruction, yielding the complete Chang’E-6 descent trajectory based on the derived camera parameters. Aerial triangulation is employed for obtaining camera poses as well as trajectory reconstruction, which are essential for subsequent height determination and image resolution calculation. To estimate the true altitudes of each camera pose, we project the positions of the camera poses onto a vertical axis relative to the lunar surface. Specifically, we define the height of each camera pose pt as follows:
where pe−5 and pe−2 represent 3D positions at the fifth and second pre-landing frames, selected based on their vertical descent characteristics. The height axis z is orthogonal to the lunar surface in the current coordinate system, \({h}_{0}^{{\prime} }\) denotes the relative height projection of the camera pose in the initial descent frame onto the height axis and h0 is the mission-specific absolute altitude at descent initiation.
After determining the true heights, the physical resolution of the descent images is calculated using the landing camera intrinsics while lunar curvature effects are neglected due to the negligible height-to-radius ratio. Finally, 5 candidates are identified based on resolution similarity to the LROC DOM. For Chang’E-6, based on the 1.12 m/px resolution of the LROC DOM, the selected 5 descent images have a specific resolution range of 0.9 to 1.2 m/px.
Identification of target small-area DOM
After the physical resolution was calculated, the descent keyframe with comparable resolution to DOM was selected to address the differences in resolution. Although this selection minimizes resolution disparities, substantial differences in illumination (see Supplementary Material H) and perspective remain between the descent keyframe and the DOM. To mitigate luminance variations, histogram specification was performed on the descent keyframe using the DOM as a reference template. The matching network which employs deep learning methodologies, is then used to identify the small-area DOM containing the landing site. The input data are the histogram-specified descent keyframe and the small-area DOMs segmented from the LROC DOM. To further accommodate angular misalignments, each small-area DOM is rotated from 0 to 360 degrees in 45-degree increments (see Supplementary Material H for details).
The matching network consists of the SuperPoint Network, SuperGlue Network, and a matching evaluation module. During training, both SuperPoint and SuperGlue are exposed to geometrically perturbed image pairs generated via randomized homography transformations. This synthetic augmentation endows the network with invariance to substantial viewpoint changes, thereby enhancing its robustness to perspective distortions.
The SuperPoint network39 enabling accurately detecting keypoints and generating high-quality descriptors across various image scenes. SuperPoint uses a single, shared encoder ΦEncoder to process and reduce the input image dimensionality. The features then flow into two decoders, one for interest point detection \({\Phi }_{Decoder}^{InterestPoint}\) and the other for interest point description \({\Phi }_{Decoder}^{Descriptor}\). The architecture of the cascading network is shown in Supplementary Fig. S6.
where \({{\mathcal{I}}}\) represents image, \({{\mathcal{K}}}P\) and \({{\mathcal{D}}}\) is the extracted keypoints and feature descriptors.
The SuperGlue network40 first utilizes a multi-layer attention graph neural network to create more powerful representations. A keypoint represented with coordinate and detection confidence are then preprocessed by a positional encoder and then combined with corresponding descriptor to get the input feature.
where kp is the keypoint and d is the descriptor.
The multi-layer attention graph neural network combines self-attention, cross-attention and graph neural network. The adoption of the self-attention mechanism is motivated by its ability to integrate contextual information, thereby enhancing feature distinctiveness. In contrast, the cross-attention mechanism aims to identify potential matches with visually similar patterns in paired images.
where A and B are two images, F_inputA and F_inputB are input features from A and B by Eq. (10), and i and j mean the i-th input feature and the j-th input feature. F_inputA is involved in self-attention mechanism for \(f\_inpu{t}_{A}^{i}\) and cross-attention mechanism for \(f\_inpu{t}_{B}^{\,j}\).
where <⋅,⋅> is the inner product. \({{\mathcal{M}}}P\) and \({{\mathcal{M}}}S\) are the matching points and matching score.
In the matching evaluation module, candidate DOMs are ranked based on their average matching score, with the highest-ranked one selected as the best small-area DOM. This method was validated on the landing site localization tasks of Chang’E-3, Chang’E-4, and Chang’E-5, demonstrating robustness and accuracy in matching descent image keyframes with the small-area DOMs. By calculating homography matrices, the landing point is projected frame by frame from the last descent image to the descent image keyframe, and finally onto the LROC DOM, yielding a coarse localization result.
Coarse landing site positioning
The coarse landing site positioning pipeline processes adaptively sampled descent image sequences and the optimal small-area DOM selected by the cascading matching network. This process employs a homography-based transformation model, where the optimization metric corresponds to the residual error generated during the homographic matrix estimation procedure. The landing site is delineated as the central pixel of the final descent image. Through iterative homography estimation between consecutive descent images, the projected landing coordinates undergo sequential propagation across successive images until reaching the keyframe demonstrating maximal geometric congruence with the small-area DOM, whereupon the coordinates are transferred to the DOM coordinate system. Crucially, the matching cascading network quantifies matching confidence scores between the five candidate keyframes and the small-area DOM, with the highest-scoring keyframe being identified as the geometrically optimal terminal frame for final coordinate projection.
Coarse localization estimates the homography matrix between two images by solving the optimization in Eq. (15).
Here, \({{{\mathcal{I}}}}_{1}\) and \({{{\mathcal{I}}}}_{2}\) represent two images, while xi1 and xi2 are the i-th pair of matching points in \({{{\mathcal{I}}}}_{1}\) and \({{{\mathcal{I}}}}_{2}\), respectively. The matching point pairs are obtained via the matching cascading network. \(H({{{\mathcal{I}}}}_{1},{{{\mathcal{I}}}}_{2},{x}_{i1})\) represents the projection of xi1 from \({{{\mathcal{I}}}}_{1}\) onto \({{{\mathcal{I}}}}_{2}\) using the homography matrix. ∣∣⋅∣∣ denotes the L2-norm. While the error is initially localized to individual image pairs, it exhibits cumulative propagation characteristics during the temporal sequence processing of landing site coordinates.
The homography transformation describes the projective relationship between two planar surfaces. This planar assumption neglects the true three-dimensional relief of the lunar surface and may introduce errors when applied to areas with significant topographic variation. While homography-based methods may incur errors due to ignored terrain elevation variations, our framework mitigates this through intelligent bundle adjustment that integrates 3D reconstruction.
Fine landing site positioning
In fine landing site positioning, we employ 3D reconstruction techniques based on aerotriangulation to compute the final landing coordinates. The pipeline processes the adaptively sampled descent images together with the selected small area DOM as its inputs. The computational framework implements photogrammetric aerotriangulation to optimize the three-dimensional reconstruction, with the objective function formalized as the minimization of reprojection error for triangulated terrain features.
Unlike homography transformation, the bundle adjustment algorithm in aerotriangulation employs three-dimensional coordinates to represent feature points, thereby preserving the complete spatial information of lunar terrain features. The objective of bundle adjustment14 can be expressed by Eq. (16).
where Cj represents the camera plane of the j-th image, Xi denotes the i-th 3D point, and P(Cj, Xi) − xij refers to the projection of Xi onto Cj, yielding the corresponding 2D point coordinates. xij represents the observed 2D coordinates of Xi in the j-th image. When Xi is observable in the j-th image, αij = 1; otherwise, αij = 0. Bundle adjustment optimizes camera poses across the entire sequence by minimizing feature point re-projection error across multiple overlapping images, which improves 3D reconstruction and motion estimation. Therefore, fine landing site positioning was introduced to enhance accuracy.
Following the determination of the best small-area DOM in coarse landing site positioning, it is obvious that the adjacent images to the descent image keyframe, as well as the keyframe itself, possess a sufficient number of tie points projected onto the best small-area DOM. This condition justifies incorporating the best small-area DOM into the descent image set for aerotriangulation. Aerotriangulation calculates the poses of the input images and a number of tie points with their projection on corresponding images and their 3D coordinates. In aerotriangulation, P(Cj, Xi) in Eq. (16) can be derived from Eq. (18).
Here, [x, y] and [X, Y, Z] represent the image coordinates and spatial coordinates on the lunar surface for Xi, respectively. [x0, y0] and [XS, YS, ZS] denote the image coordinates and the spatial coordinates on the lunar surface of the Cj principal point, respectively. RS is the rotation matrix for Cj and r11 to r33 are the elements of RS. The pose of Cj is defined by (XS, YS, ZS) and RS. f is the focal length of Cj, and Δx and Δy are the correction factors obtained through camera calibration. Given the camera intrinsic parameters K and the pose of the best small-area DOM, along with the 3D coordinates of the tie points XW in the world coordinate system, the projection of the tie points onto the best small-area DOM can be computed using the Eq. (19).
Upon completing aerotriangulation with bundle adjustment, the 3D coordinates of tie points automatically identified within the central region of the final descent keyframe were projected onto the optimal small area DOM. The landing site coordinates were then computed as the mean of these projected points.
Preprocessing and metrological calibration of landing-site imagery for geological analysis
Prior to geological analysis, lunar surface images underwent systematic preprocessing through orthorectification and spatial calibration. While traditional photogrammetric approaches typically rely on external DEMs as the basis for orthorectification, such high-resolution DEMs are often unavailable in landing missions. In this study, the orthorectification is instead achieved by exploiting intrinsic information from the descent imagery, including camera pose and dynamic scale variations, thereby avoiding the dependence on external DEMs and enabling accurate correction in data-limited scenarios. Specifically, the processing pipeline begins with geometric correction using camera poses \({{{\bf{T}}}}_{cam}^{world}\in SE(3)\) from visual localization, combined with surface normal vectors z (as defined in Section Determination of descent image keyframes) acquired during the lander’s free-fall phase. These parameters enable derivation of nadir-aligned orthographic projections through homography transformations:
where \({{\mathcal{F}}}\) represents the normal-constrained projection function generating the homography matrix. The orthorectified images Iortho are then obtained via:
with \({{\mathcal{W}}}\) denoting the warping operator. Subsequently, ground sampling distance (GSD) calibration was performed through N ≥ 5 control points \(\{{{{\bf{p}}}}_{k}^{map},{{{\bf{p}}}}_{k}^{image}\}\) referenced to baseline maps of known resolution GSDbase:
establishing the metrological foundation for subsequent quantitative geological analysis.
Crater size-frequency distribution measurement
For absolute age determination, crater size-frequency distribution (CSFD) measurements, following the methodology established by Michael & Neukum8, were performed to derive the absolute model ages (AMAs) of the mare units. Only regions free from significant contamination by secondary craters, deformation from wrinkle ridges, or disruption by volcanic landforms were selected for analysis. The ArcGIS plugin CraterTools41was used to measure the diameters of primary craters. Then, Craterstats28 was used to fit AMAs through Poisson timing analysis, employing the production function established by Neukum et al.42.
Crater classifications and degradation age estimation
Crater classification was conducted based on morphological distinctiveness and size, following the criteria established by Basilevsky20. The system includes five primary categories (Classes A, AB, B, BC, and C), which reflect progressive stages of morphological degradation and serve as qualitative indicators of relative crater age:
I. Class A: Represents the youngest craters with sharp, well-defined rims and prominent ejecta blankets, indicating minimal degradation.
II. Class B: Characterized by noticeably degraded rims and more subdued ejecta blankets, indicative of increased surface exposure and aging.
III. Class AB: Transitional forms between Class A and B, which show moderate rim erosion and slightly diminished ejecta features, suggesting a limited degree of degradation.
IV. Class BC: Represent a further stage of degradation, with crater rims becoming poorly defined and ejecta features largely obscured.
V. Class C: The most degraded and thus oldest category, defined by heavily eroded rims and little to no visible ejecta, consistent with prolonged interaction with lunar surface processes.
The ages of lunar craters were estimated by analyzing their morphological features and comparing them to established criteria for each class. According to Basilevsky20, the total lifetime of craters smaller than 160 m in diameter can be approximated by the equation T (m.y.) ≈ 2.5 D (m), where T represents the lifetime and D denotes the diameter. Transitions between classes correspond to specific percentages of a crater’s total lifetime spent on the lunar surface. Specially, the transition from Class AB to Class B, Class B to Class BC, and Class BC to C occurs when a crater has spent approximately 3%, 20%, and 50% of its total lifetime, respectively.
Error evaluation
The overall localization error was evaluated using the LROC DOM containing the spacecraft body as the reference standard for both coarse and fine localization assessments. Since the DOM used during the Chang’E-6 mission did not capture the spacecraft body (Fig. 2k), we referenced an LROC image taken six days post-mission (Fig. 2l). Recognizable craters were manually selected as matching points (yellow points in Fig. 2k, l) for homography transformation. The homography matrix was applied to project the fine localization coordinates from Fig. 2k, l to calculate the error. As shown in Fig. 2l, the red cross represents the projected landing point, which aligns with the lander body. To ensure error measurement precision, we implemented a rigorous error metric protocol wherein the pixel centroid coordinates of the lander were established as ground truth, and physical distance errors were calculated by converting pixel-level discrepancies between localization results and ground truth. As documented in Supplementary Tables S2 and S3, this approach demonstrated a significant error reduction from 10.21 m (coarse localization) to 0.90 m (fine localization), representing a tenfold improvement in positioning accuracy.
Software
The proposed lunar landing site localization methodology has been implemented as an integrated software framework with five modular processing chains: (1) data management, (2) image preprocessing, (3) coarse localization, (4) fine localization, and (5) landing site mapping. Each module could simultaneously displays input/output imagery alongside quantitative results while autonomously archiving outputs with checksum verification.
Validation through rigorous testing on Chang’E-3/4/5 mission datasets confirmed the system’s algorithm robustness and operational stability across diverse lunar terrains. The graphical user interface (GUI), detailed in Supplementary Fig. S9, features a multi-panel visualization layout that dynamically updates processing parameters and intermediate results through asynchronous I/O operations, maintaining processing latency under 200 ms per operational cycle.
Data availability
Our method successfully located Chang’E-6 in LROC M1387992643L. Chang’E-6 lander was captured by LROC and the image can be downloaded from https://www.lroc.asu.edu/images/1374. The original descent imagery data used in this study is processed and produced by Ground Research and Application System (GRAS) of China’s Lunar and Planetary Exploration Program and can be downloaded from China’s Lunar and Planetary Data Release System. (https://moon.bao.ac.cn/ce5web/moonGisMap.search). The descent camera imagery of Chang’E-6 used in this study was obtained from the publicly available Chang’E-6 landing video (https://www.cnsa.gov.cn/n6758823/n6758838/c10541660/content.html). The original data can be transformed into the regular image format . png by pds4-tools. Pds4-tools is a package intended to allow easy read-in of NASA PDS4 data and meta-data into Python. (https://pypi.org/project/pds4-tools) The LROC maps used for Chang’E-3, Chang’E-4 and Chang’E-5 can be downloaded from https://wms.lroc.asu.edu/lroc/view_lroc/LRO-L-LROC-3-CDR-V1.0/M1259058367LC, https://wms.lroc.asu.edu/lroc/view_rdr_product/NAC_DTM_CHANGE4_M1303619844_140CMand https://wms.lroc.asu.edu/lroc/view_rdr_product/NAC_ROI_CHANGE5_LOA_E432N3091, respectively. In addition, we have provided the refs. 43,44 to the previously published localization results of the Chang’E-6 landing site based on the Chang’E-2 global lunar topography data (CE2TMap2015) for readers’ reference.
Code availability
The source code supporting the core implementation is available at https://github.com/BroenLin/moon_location.
References
Melosh, H. et al. South pole-aitken basin ejecta reveal the moon’s upper mantle. Geology 45, 1063–1066 (2017).
Potter, R., Collins, G., Kiefer, W., McGovern, P. & Kring, D. Constraining the size of the south pole-aitken basin impact. Icarus 220, 730–743 (2012).
Johnson, A. E. et al. Implementation of a map relative localization system for planetary landing. J. Guid. Control Dyn. 46, 618–637 (2023).
Edwards, C. D. et al. Telecommunications relay support of the mars phoenix lander mission. In Proceeding of 2010 IEEE Aerospace Conference, 1–13 (IEEE, 2010).
Lee, A. et al. Preliminary design of the guidance, navigation, and control system of the altair lunar lander. In Proceeding of AIAA Guidance, Navigation, and Control Conference, 7717 (2010).
Gou, S. et al. Thin basaltic regolith at the chang’e-6 landing site. Earth Planet Sci. Lett. 655, 119266 (2025).
Robinson, M. S. et al. Lunar reconnaissance orbiter camera (lroc) instrument overview. Space Sci. Rev. 150, 81–124 (2010).
Michael, G. & Neukum, G. Planetary surface dating from crater size-frequency distribution measurements: Partial resurfacing events and statistical age uncertainty. Earth Planet Sci. Lett. 294, 223–229 (2010).
Michael, G. G., Platz, T., Kneissl, T. & Schmedemann, N. Planetary surface dating from crater size-frequency distribution measurements: spatial randomness and clustering. Icarus 218, 169–177 (2012).
Wan, W. et al. Descent image matching based position evaluation for chang’e-3 landing point. Spacecr. Eng. 23, 5–12 (2014).
Wang, J. et al. Vision based chang’e-4 landing point localization. Sci. Sin. Technol. 50, 41–53 (2020).
Liu, J. et al. Descent trajectory reconstruction and landing site positioning of chang’e-4 on the lunar farside. Nat. Commun. 10, 4229 (2019).
Wang, J. et al. Location and accuracy validation of lunar landing point based on multi-source images. Chin. J. Space Sci. 41, 320–328 (2021).
Triggs, B., McLauchlan, P. F., Hartley, R. I. & Fitzgibbon, A. W. Bundle adjustment-a modern synthesis. In International Workshop on Vision Algorithms, 298–372 (Springer, 1999).
China National Space Administration. Ground research and application system of china’s lunar and planetary exploration program. chang’e-3 landing camera dataset https://doi.org/10.12350/CLPDS.GRAS.CE3.LCAM-2A.vA (2015).
China National Space Administration. Ground research and application system of china’s lunar and planetary exploration program. chang’e-4 landing camera dataset https://doi.org/10.12350/CLPDS.GRAS.CE4.LCAM-2A.vA (2020).
China National Space Administration. Ground research and application system of china’s lunar and planetary exploration program. chang’e-5 landing camera dataset https://doi.org/10.12350/CLPDS.GRAS.CE5.LCAM-2A.vA (2020).
Fortezzo, C. M., Spudis, P. D. & Harrel, S. L. Release of the digital unified global geologic map of the moon at 1:5,000,000-scale. In Proceeding of 51st Lunar and Planetary Science Conference, 2760 (Lunar and Planetary Institute, 2020).
Ivanov, M. et al. Geologic history of the northern portion of the south pole-aitken basin on the moon. J. Geophys Res: Planets 123, 2585–2612 (2018).
Basilevskii, A. T. On the evolution rate of small lunar craters. In Proceeding of 7th Lunar Science Conference, Houston, Tex., March 15–19, 1005–1020 (Pergamon Press, Inc., 1976).
Haruyama, J. et al. Long-lived volcanism on the lunar farside revealed by selene terrain camera. Science 323, 905–908 (2009).
Greeley, R. et al. Galileo imaging observations of lunar maria and related deposits. J. Geophys Res: Planets 98, 17183–17205 (1993).
Pasckert, J. H., Hiesinger, H. & van der Bogert, C. H. Lunar farside volcanism in and around the south pole-aitken basin. Icarus 299, 538–562 (2018).
Hiesinger, H., Head III, J., Wolf, U., Jaumann, R. & Neukum, G. Ages and stratigraphy of mare basalts in oceanus procellarum, mare nubium, mare cognitum, and mare insularum. J. Geophys. Res. Planets 108 (2003).
Jia, M. et al. A catalogue of impact craters larger than 200 m and surface age analysis in the chang’e-5 landing area. Earth Planet Sci. Lett. 541, 116272 (2020).
Wang, B. W. et al. Returned samples indicate volcanism on the moon 120 million years ago. Science 385, 1077–1080 (2024).
Qian, Y. et al. Long-lasting farside volcanism in the apollo basin: Chang’e-6 landing site. Earth Planet Sci. Lett. 637, 118737 (2024).
Head, J. W. & Wilson, L. Generation, ascent and eruption of magma on the moon: new insights into source depths, magma supply, intrusions and effusive/explosive eruptions (part 2: predicted emplacement processes and observations). Icarus 283, 176–223 (2017).
Wilson, L. & Head, J. W. Generation, ascent and eruption of magma on the moon: new insights into source depths, magma supply, intrusions and effusive/explosive eruptions (part 2: predicted emplacement processes and observations). Icarus 283, 146–175 (2017).
Li, Q. L. et al. Two-billion-year-old volcanism on the moon from chang’e-5 basalts. Nature 600, 54–58 (2021).
Cao, K. et al. A novel method for simultaneous analysis of particle size and mineralogy for chang’e-5 lunar soil with minimum sample consumption. Sci. China Earth Sci. 65, 1704–1714 (2022).
Taylor, L. A. et al. Mineralogical and chemical characterization of lunar highland soils: insights into the space weathering of soils on airless bodies. J. Geophys Res 115, E02002 (2010).
Warren, P. H. The magma ocean concept and lunar evolution. In Annual Review of Earth and Planetary Sciences, vol. 13, 201–240 (Annual Reviews, Inc., 1985).
Elkins-Tanton, L. T., Burgess, S. & Yin, Q. Z. The lunar magma ocean: Reconciling the solidification process with lunar petrology and geochronology. Earth Planet Sci. Lett. 304, 326–336 (2011).
Hirt, C. & Featherstone, W. E. A 1.5 km-resolution gravity field model of the moon. Earth Planet Sci. Lett. 329, 22–30 (2012).
Yamamoto, S. et al. Possible mantle origin of olivine around lunar impact basins detected by selene. Nat. Geosci. 3, 533–536 (2010).
Moriarty, D. et al. Evidence for a stratified upper mantle preserved within the south pole aitken basin. J. Geophys. Res. Planets 126, e2020JE006589 (2021).
Wang, Z., Bovik, A., Sheikh, H. & Simoncelli, E. Image quality assessment: from error visibility to structural similarity. IEEE Trans. Image Process 13, 600–612 (2004).
DeTone, D., Malisiewicz, T. & Rabinovich, A. Superpoint: self-supervised interest point detection and description. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, 224–236 (2018).
Sarlin, P.-E., DeTone, D., Malisiewicz, T. & Rabinovich, A. Superglue: learning feature matching with graph neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 4938–4947 (2020).
Kneissl, T., van Gasselt, S. & Neukum, G. Map-projection-independent crater size-frequency determination in gis environments-new software tool for arcgis. Planet Space Sci. 59, 1243–1254 (2011).
Neukum, G., Ivanov, B. A. & Hartmann, W. K. Cratering records in the inner solar system in relation to the lunar reference system. In Chronology and Evolution of Mars: Proceedings of an ISSI Workshop, 10–14 April 2000, Bern, Switzerland, 55–86 (Springer, 2001).
Liu, Z. et al. High-precision visual localization of the chang’e-6 lander. Natl. Remote Sens. Bull. 28, 1649–1656 (2024).
Yan, W. et al. Geological characteristics of chang’e-6 landing area in micro-scale unveiled by new observation data. Nat. Commun. 16, 4219 (2025).
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Grant no. 62271016), the Chinese Academy of Geological Sciences Basal Research Fund (Grant no. JKYDM2025110), the Beijing Natural Science Foundation (Grant no. 4222007), and the Fundamental Research Funds for the Central Universities.
Author information
Authors and Affiliations
Contributions
S.S., L.L., B.H., Y.L., and X.B.: research conceptualization, methodology design, and manuscript writing. S.S., B.H., Y.L., Y.L., and X.B.: geological analysis and interpretation. F.C. and L.L.: software implementation and experimental platform setup. D.X., C.H., and C.M.: experimental investigation, and data validation.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Earth & Environment thanks the anonymous, reviewer(s) for their contribution to the peer review of this work. Primary Handling Editor: Joe Aslin. [A peer review file is available].
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Shu, S., Lin, L., Hou, B. et al. Intelligent vision-guided trajectory reconstruction enables rapid localization and characterization of the Chang’E-6 landing site. Commun Earth Environ 7, 61 (2026). https://doi.org/10.1038/s43247-025-03074-7
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s43247-025-03074-7
