
Abstract
The growing demands of 6G mobile communication networks necessitate advanced antenna technologies. Movable antennas (MAs) and reconfigurable antennas (RAs) enable dynamic control over antenna’s position, orientation, radiation, polarization, and frequency response, introducing rich electromagnetic-domain degrees of freedom for the design and performance enhancement of wireless systems. This article overviews their application scenarios, hardware architectures, and design methods. Field test and simulation results highlight their performance benefits over conventional fixed/non-reconfigurable antennas.
Similar content being viewed by others
Introduction
The rapid growth and diversification of wireless services have driven the evolution of mobile communication networks from the first generation (1G) to the fifth generation (5G). As spectrum resources remain limited, enhancing spectral efficiency has always been a key research focus to meet growing data rate demands. Multiple-input multiple-output (MIMO) technology has emerged as a cornerstone in this pursuit, exploiting spatial degrees of freedom (DoFs) via multiple antennas at base stations (BSs) and/or user terminals1. MIMO systems provide diversity and multiplexing gains, significantly improving reliability and capacity in modern mobile communication networks. To meet increasing performance requirements, MIMO has evolved into massive MIMO in 5G2 and is envisioned to scale further into extremely large-scale MIMO (XL-MIMO) in the future sixth-generation (6G) networks for more flexible beamforming and enhanced spatial multiplexing3,4. However, these advancements also lead to increased hardware complexity, higher power consumption, and greater signal processing overhead, posing critical challenges for practical deployment and sustainability.
To address these limitations, recent efforts have explored cost-effective MIMO implementations through novel antenna architectures. In this context, movable antennas (MAs)5,6,7,8,9 and reconfigurable antennas (RAs)10,11,12,13 have gained attraction for their ability to flexibly adjust antenna properties, including position, orientation, radiation pattern, polarization, and frequency response. MAs, also known as six-dimensional MA (6DMA) in the general form8,9, reconfigure external placement (position and orientation), while RAs tune internal radiation characteristics. Despite their differences, both MAs and RAs share the unique capability of reconfiguring wireless channels directly in the electromagnetic domain, complementing traditional analog/digital signal processing. This paradigm shift has sparked broad interest, revealing great promise in balancing system performance with cost and energy efficiency14,15,16,17,18.
As shown in Fig. 1, MAs and RAs enable considerable performance enhancement across different 6G usage scenarios19. By dynamically reconfiguring wireless channels, they improve spectral efficiency and coverage for data-intensive applications such as virtual reality (VR) and Internet of Things (IoT), enhancing signal strength and mitigating interference. Their ability to adapt channel conditions also supports ultra-low latency and high reliability, which are essential for mission-critical tasks like autonomous driving. Furthermore, the flexibility in adjusting position, orientation, radiation, and polarization significantly improves sensing accuracy in dynamic environments. This reconfigurability facilitates integrated sensing and communication (ISAC), where antenna movement and configuration are jointly optimized to balance dual functions20. Additionally, artificial intelligence (AI) can be employed to enhance real-time control, adaptation, and resource coordination in dynamic environments.

Typical usage scenarios for MAs and RAs towards 6G.
To unlock the full potential of MAs and RAs in future wireless networks, this article provides a comprehensive overview of their technical foundations, challenges, and recent progress. We first introduce key hardware architectures at both the antenna and array levels. Then, typical design approaches for antenna movement and configuration are discussed. Field test and simulation results are presented to showcase their performance benefits. Finally, several open research problems are highlighted to guide future investigations in this emerging field.
Hardware architectures
This section discusses the hardware architectures of MAs and RAs from the perspective of antenna-level implementation and array-level integration. They can be realized through mechanical, fluidic, electronic, or hybrid means, offering varying levels of flexibility, complexity, and response speed.
Antenna-level Implementation
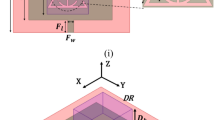
Figure 2a shows that the position and/or orientation of an antenna can be controlled by motorized slides or microelectromechanical systems (MEMS)6,9. For different mechanical structures, the movement range can vary from micro-scale (on the order of wavelengths) for exploiting the phase variations of channel paths5 to macro-scale (on the order of several to tens of meters) for reconfiguring large-scale channel conditions, e.g., path loss and line-of-sight (LoS) visibility21. Alternatively, fluidic actuation, as shown in Fig. 2b, enables micro-scale movement by adjusting the pressure in syringes or using micropumps to reposition metallic or non-metallic fluid radiators22. In comparison, a recently proposed pinching antenna, illustrated in Fig. 2c, uses dielectric particles (e.g., plastic pinches) to move along waveguides for macro-scale repositioning23,24.

a Motor-based MA; b Fluid-based MA; c Pinching-based MA; d Phase center-tunable RA; e Radiation-tunable RA.
In addition to physical movement, antenna characteristics can be reconfigured electronically. For instance, Fig. 2d depicts a dual-mode patch antenna capable of shifting its phase center by simultaneously exciting TM11 and TM21 modes25. Other element-level reconfiguration techniques include electronic, optical, mechanical, and smart-material-based methods26. A typical example is shown in Fig. 2e, where switching among four positive-intrinsic-negative (PIN) diodes tunes the radiation pattern of the antenna27.
Array-level integration
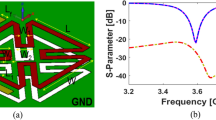
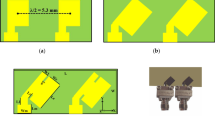
By integrating the above mechanical or electronic mechanisms, multiple antennas can jointly adjust their positions, orientations, or electromagnetic properties to realize efficient arrays. Figure 3a presents several mechanical MA array architectures. Specifically, multiple antenna sub-arrays possess the capacity for mobility in the form of sliding, thus allowing for the enlargement of the aperture of the sliding array. This indeed promotes the creation of near-field effects and further enhances signal transmissions in both the angle and distance domains25,28. The rotatable array29,30, which can be considered a special case of 6DMA8,9, allows to flexibly alter its orientation for adapting to the time-varying and non-uniformly distributed users, which helps increase the desired signal power and mitigate interference among different user clusters. The foldable array can be flexibly expanded or folded in alignment with distinct application requirements, where the former mode can be applied to enhance the array aperture and the latter can be utilized for reducing wind disturbance25.

a MA array; b IRS; c DMA; d RHS; e Pixel array.
Apart from these mechanically MA arrays, several emerging RA arrays have also demonstrated great potential to overcome the deficiency of conventional MIMO systems. Fig. 3b shows a passive intelligent reflecting surface (IRS) with three layers: reconfigurable metallic patches, a copper backplane to prevent signal leakage, and a control board for dynamic tuning31. A dynamic metasurface antenna (DMA), shown in Fig. 3c, features microstrips with programmable metamaterial elements to form desired beams32. A reconfigurable holographic surface (RHS), illustrated in Fig. 3d, uses embedded feeds and waveguides to radiate amplitude-controlled reference waves via tunable elements33,34. Figure 3e shows a pixel array, which alters antenna geometry by switching connections between adjacent metallic pixels35.
Comparison and hybrid designs
It is imperative to deliberate on the distinctive advantages and limitations of the above hardware architectures of MAs and RAs for practical implementation in future 6G mobile communication systems. For instance, mechanical MAs can be moved over a wide range and are of fine movement resolution14,21, while their movement is generally constrained by kinematic factors, such as acceleration and speed, which may prevent them from quick response to rapid variation of instantaneous channels. In comparison, electronic RAs possess the capacity to respond expeditiously to highly dynamic channel conditions, and they can be fabricated to be highly compact in size. However, the state and resolution of electronic reconfiguration are in general limited due to cost considerations.
Additionally, MA/RA arrays enable the collective adjustment of multiple antennas’ locations, orientations, and electromagnetic properties. This helps achieve a trade-off between performance degradation and reduced hardware costs36,37. Nevertheless, hybrid architectures can combine the advantages of different hardware architectures while mitigating their respective drawbacks. For example, electronic RA elements can be formed within a mechanical MA array to provide superior flexibility for reconfiguring channel conditions. Specifically, large-scale location adjustments can be achieved through movement of the mechanical array to adapt to slow-varying statistical channel conditions, while small-scale position/radiation alterations can be achieved through tuning of the electronic elements to adapt to fast-varying instantaneous channel conditions. Similarly, other aforementioned hardware architectures of MAs and RAs can also be tailored for more effective hybrid designs for practical implementations and specific applications.
Deployment considerations
In light of the divergent deployment requirements across different scenarios, it is important to select appropriate hardware architectures to ensure a balanced system performance and implementation overhead. For example, BSs are adequately supplied with energy and have sufficient space for antenna array installation, which facilitates the implementation of mechanical array-level MAs for performing position/orientation adjustments to accommodate long-term statistical channels, switch between communication and sensing services, or support aerial and terrestrial connectivity. Meanwhile, to further enhance system performance, electronic element-level RAs can be employed to achieve real-time reconfiguration of instantaneous channel conditions. Additionally, it is more likely to mount MEMS-enabled MAs, fluid-based MAs, or electronic RAs on user terminals to guarantee the compactness and portability. Furthermore, it is appealing to deploy passive counterparts in environments to reconfigure the signal propagation conditions. For example, passive IRS can be mounted on the building facades to help enhance the desired signal strength and suppress undesired interference via joint movement and radiation optimization.
It is foreseeable that future wireless networks will operate over different frequency bands for diverse applications, so different requirements will arise for the selection of antenna hardware architectures. For example, the wireless channels over sub-6 GHz bands undergo rich scattering, where the real-time MA movement (on the order of sub-wavelengths) or RA reconfiguration can adapt to small-scale fading channels and thus yield significant spatial diversity gains. In comparison, the wireless channels over millimeter-wave (mmWave)/terahertz (THz) bands experience path sparsity, where MA/RA arrays can achieve more flexible beamforming and enhanced spatial multiplexing in the angular domain, benefiting from the geometry/radiation flexibility. Moreover, the macro-scale MA movement (on the order to several to tens of meters) can proactively establish LoS paths and reduce path loss between the BS and users, which significantly improves coverage performance in the high-frequency bands with LoS-dominant channels.
Antenna movement/configuration design
The antenna movement and configuration design of MA- and RA-enabled systems are pivotal but challenging to harness their full potential and benefits. Based on the reliance of channel state information (CSI), existing approaches can be classified into three main categories, i.e., CSI-based, CSI-free, and AI-driven methods, which are outlined as follows.
CSI-based design
CSI-based design involves a preliminary step of acquiring the complete knowledge of CSI38,39,40,41, which is followed by the antenna movement and configuration optimization. The best way is to derive a closed-form solution for antenna position, orientation, or electromagnetic properties under specific system setups, e.g., those in refs. 42,43,44. However, it is noted that obtaining an optimal closed-form solution for antenna movement or configuration may be challenging in general due to the highly non-linear metric function and highly coupled variables in practical systems. In this regard, performing an exhaustive search over discrete solutions and selecting the ones achieving the best system performance would be another straightforward method45. However, this method may incur high computational complexity and energy consumption, as candidate solutions must be densely sampled to guarantee optimality. This significantly impedes its practical implementation in real-world scenarios. Although evolutionary algorithms with heuristic searching capabilities can be similarly leveraged to pursue favorable antenna positions, orientations, or configurations, such as particle swarm optimization46,47, firefly algorithm48, and hippopotamus optimization49, it may still exhibit low efficiency when confronted with substantial numbers of antenna elements or ultra-large movable regions. To overcome this limitation, gradient descent/ascent50,51,52, successive convex approximation (SCA)7,53,54, semi-definite relaxation (SDR)55, and other non-convex programming based techniques have been adopted to obtain sub-optimal antenna setups, while they are prone to being trapped in local optima. Moreover, to further decrease the complexity of optimizing MAs’ positions within a continuous moving region, several discrete sampling based schemes have been developed to achieve optimal on-grid position selection, such as graph-based approach56,57 and orthogonal matching pursuit (OMP)-based method58,59,60. Nevertheless, these methods fall short of achieving truly best system performance since the DoFs in the continuous spatial domain have not been fully exploited. Therefore, the off-grid optimization should be adopted to refine the on-grid positions of the antennas into continuous ones, thereby improving the overall system performance.
Notably, the aforementioned optimization methods can be implemented based on either instantaneous or statistical CSI. On one hand, antenna movement/reconfiguration based on instantaneous CSI can yield the best performance but necessitates frequent adjustments in fast fading channels, potentially incurring substantial pilot overhead and energy consumption. On the other hand, the statistical CSI remains unchanged over a long time period, and the antennas require repositioning or reconfiguration only upon changes of the statistical CSI or user distributions, thereby significantly reducing system overhead at the cost of certain performance loss61,62.
CSI-free design
In contrast to CSI-based design, CSI-free design does not require complete knowledge of CSI to design the antenna position, orientation, or configuration. This avoids the estimation of numerous channel coefficients and thus mitigates both the pilot overhead and the CSI estimation complexity. Typical CSI-free design approaches include codebook-based methods and adaptive optimization based on online measurement. Specifically, the codebook-based approach first involves designing a codebook with several antenna modes offline, guaranteeing communication performance under different channel conditions. Subsequently, online training between the BS and users is performed, wherein the BS evaluates the system performance under different antenna modes. Finally, the mode that achieves the best system performance is selected for wireless transmission. Despite investigations in refs. 17,63,64, the codebook-based design for MAs and RAs still remains a significant challenge since the antenna movement and configuration are generally coupled with analog/digital signal processing parameters. In contrast, the adaptive optimization based on online measurement treats the design for antenna movement/configuration as a black-box optimization problem, which can be then efficiently addressed by methods such as Bayesian optimization65 and zeroth-order optimization66 with previous measurements. For example, the authors in ref. 67 maximized the sum-rate of multiple users in an MAs-enabled communication system via a derivative-free approach. In their proposed method, the gradient of the objective function was approximated based on the previously received signals, which alleviates the need for complete CSI acquisition.
AI-driven design
AI-driven approaches serve as a supporting methodology for both CSI-based and CSI-free designs. On one hand, the supervised machine learning method is capable of extracting the relationship between the CSI and the optimal antenna setups by offline training6. Then, the real-time channel measurements can be input to the well-trained neural networks, and the favorable antenna setups will be output to realize the system’s overarching performance goals. However, this may be challenging in real-world applications due to the absence of labeled training data. In addition, the neural networks should be retrained when certain prior system parameters change, such as the number of antenna elements and the size of the moving region, which challenges the algorithm’s adaptivity and efficiency. In light of these considerations, unsupervised machine learning methods, such as reinforcement learning and deep reinforcement learning, can be leveraged to optimize the antenna movement and configuration, bypassing the need for labeled training data68, which generally comprises an offline training phase and an online application phase. Specifically, during the offline training phase, the agents interact with the environment to learn policies for antenna movement and configuration by repeatedly taking actions and updating states. Consequently, the primary objective function increases in line with the reward function during the training process. Based on the obtained optimal policies during the offline training process, online solutions for antenna movement and configuration can then be efficiently acquired. Despite the flexibility and effectiveness of the approaches in refs. 69,70,71, significant pilot signaling overheads may be incurred prior to the training process in the aforementioned explicit CSI-based AI methods. On the other hand, CSI-free reinforcement learning frameworks could be effective for refining the movement and configuration of MAs and RAs at relatively low cost. Looking forward, optimal system setups may be output by observing or measuring the objectives at several candidate discrete solutions, which requires careful design of the measurement setup and learning mechanism. In addition, other advanced AI-based techniques such as federated learning72, generative adversarial networks73, and large language models74 are also expected to achieve more efficient and intelligent designs for MA- and RA-aided wireless networks.
Experimental results
To validate the performance advantages of MAs and RAs, this section presents the field-test and simulation results in single-input and single-output (SISO) and multiuser multiple-input and single-output (MISO) systems, respectively. In particular, MAs with flexible positions and RAs with tunable radiation patterns are considered to showcase their performance advantages. For both MA and RA systems, the CSI-based designs are adopted to evaluate their theoretical performance limit, where perfect instantaneous/statistical CSI is assumed to be known for antenna movement/configuration optimization.
Field test for SISO system
To validate the performance gain in improving received signal power and in reducing undesired interference, we develop an MA-aided SISO prototype shown in Fig. 4a. With the aid of sliding tracks, the MA position can be flexibly adjusted in the three-dimensional (3D) space. A performance comparison between the MA and fixed-position antenna (FPA) systems is presented in Fig. 4b. As can be observed, by optimizing the antenna position at the receiver, the achieved signal-to-interference-plus-noise ratio (SINR) for the MA receiver improves over 10 dB as the size of the antenna moving region increases, which even outperforms multi-FPA systems adopting digital beamforming. Moreover, for larger antenna moving regions, the gap between the received SINR and signal-to-noise ratio (SNR) decreases, indicating that the MA can efficiently leverage the channel spatial variation for interference mitigation.

a Prototype; b Measured SNR&SINR. (Experimental setup: The system consists of an FPA-based transmitter, an FPA-based jammer, and an MA-based receiver. The carrier frequency is 2.49 GHz (i.e., wavelength λ = 12 cm). The maximum antenna moving region is a 3D cube of size 3.125λ = 37.53 cm, which is divided into equally spaced 25 × 25 × 25 grids. The optimal MA position is selected via exhaustive search over all cubes within a 3D subspace (with varying size) of the moving region for maximizing the received SNR or SINR. For multi-FPA receivers, the antennas are spaced by distance λ/2, and the optimal minimum mean square error (MMSE) beamforming is employed for maximizing the received SINR.)
Simulation for multiuser MISO system
Figure 5 shows the MA- and RA-aided multiuser MISO communication system and evaluate their performance gain compared to conventional FPAs. It is observed that both the MA and RA schemes can significantly improve the achievable average/ergodic sum-rate of users. In particular, the MA scheme with instantaneous channel-based antenna position optimization yields the best performance, which demonstrates the importance of array geometry reconfiguration in reducing multiuser channel correlation for interference mitigation. However, due to the slow movement speed of MAs, the instantaneous channel-based design may not be efficient for high-mobility users undergoing fast-fading channels. Therefore, the statistical channel-based MA position optimization turns to be a viable solution, which significantly reduces the antenna movement overhead at a certain sacrifice of the rate performance. In comparison, the RA scheme can achieve a moderate performance improvement compared to its FPA counterpart under both dense and spare UPA setups. Despite the fast response speed, the performance of RA systems is limited by the finite state of radiation patterns. It can be expected that as the number of candidate reconfigurable patterns increases, the RA system can achieve better communication performance at the cost of higher hardware complexity.

a Simulation scenario; b Simulation results. (Simulation setup: The single-antenna users are randomly distributed within an urban area of size 220 m × 410 m at Clementi, Singapore. Each channel realization is obtained via ray-tracing based on the randomly generated user locations within the target area. The dense uniform planar array (UPA) and sparse UPA schemes adopt 4 × 4 FPAs with inter-antenna spacing given by λ/2 and 2λ, respectively, where λ denotes the carrier wavelength and the carrier frequency is 5 GHz. For MA systems, the BS is equipped with 16 MAs with the size of the two-dimensional (2D) antenna moving region given by 8λ × 8λ, where the antenna positions are optimized based on gradient ascent for maximizing the ergodic sum rate of users62. Each RA has 4 candidate radiation patterns17, with the optimal one selected via alternate refinement for each antenna through exhaustive search. For all schemes, zero-forcing (ZF) beamforming is adopted with the optimal power allocation determined by water-filling.)
Open problems
Despite the significant performance advantages of MAs and RAs for next-generation wireless communication systems, several open problems remain to fully unlock their potential in realizing versatile and intelligent 6G networks, as elaborated in the following.
Advanced antenna architecture
Different antenna architectures possess distinct characteristics and impose varying practical constraints on flexibility, response speed, hardware cost, and energy consumption. Concurrently, diverse wireless applications and deployment environments impose unique requirements on antenna structures. For instance, the promising ISAC framework envisioned for 6G necessitates that BSs dynamically switch between sensing and communication functions, thus demanding antenna architectures capable of adaptive function reconfiguration. Consequently, the development of advanced antenna architectures is critical to achieve an optimal balance between hardware cost and system performance.
Unified modeling and analysis
The majority of existing investigations on MAs and RAs enabled wireless systems have been undertaken independently, where the performance advantages of their integrated design are unexplored. In this context, a unified channel model capturing the effects of both antenna movement and electromagnetic configuration remains imperative, which can then act as the foundation to facilitate the joint optimization. Furthermore, characterizing network performance limits based on the unified model becomes increasingly urgent to unleash their envisioned potential in improving wireless communication and/or sensing performance, while the extant literature on this topic is still limited.
Efficient algorithm development
Since the antenna movement and configuration variables are usually highly coupled with other system parameters, it is generally challenging to obtain globally optimal solutions. Despite promising approaches for antenna movement/configuration outlined before, there is an urgent need to develop more efficient algorithms for jointly optimizing the antenna movement and configuration to fully harness their benefits in 6G mobile communication systems. Furthermore, computationally efficient algorithms that guarantee solution quality, such as distributed optimization methods, warrant significant future research efforts to enable the practical deployment of MAs and RAs. In addition, robust optimization methods under imperfect CSI are also paramount to enhance the resilience and reliability of wireless communication and sensing systems.
Prototyping and experiments
Although several prototypes have been developed to validate the performance advantages of MAs and RAs in wireless systems, the majority of them remain single-antenna implementations, with movement and rotation capabilities through mechanical, electrical, or fluidic control75,76,77. To facilitate a more profound comprehension of MAs and RAs, further research is required to explore multiple MAs and RAs prototyping with hybrid control mechanisms. Concurrently, experiments across diverse application scenarios remain essential to validate the performance benefits of MAs and RAs in spatial multiplexing and flexible beamforming, providing effective insights into practical network design and deployment in the 6G era.
Standardization and commercialization
Given that MA and RA technologies remain nascent, their standardization and commercialization efforts are still in their infancy, with critical areas such as unified modeling, movement/configuration management, channel estimation, and hardware design largely unexplored. However, establishing general and standardized frameworks is essential to transition MA and RA technologies from theoretical research to practical deployment. These frameworks form the foundation for widespread commercialization, enabling significant economic benefits across the wireless ecosystem. Therefore, collective efforts from academic researchers, industrial practitioners, and other stakeholders are deserved to advance this burgeoning field.
Conclusion
MAs and RAs offer a transformative approach to overcoming the limitations of conventional MIMO systems by introducing reconfigurability directly in the electromagnetic domain. Through dynamic adjustment of antenna position, orientation, radiation pattern, polarization, and frequency response, MAs and RAs provide new DoFs for enhancing communication and sensing performance in 6G wireless networks. This article has reviewed their representative application scenarios, hardware architectures, and key design methodologies, along with field test and simulation validations. While promising performance gains have been demonstrated, several open challenges remain, particularly in hardware design, unified modeling, control algorithms, and system integration. Continued interdisciplinary research, spanning electromagnetics, antenna theory, communication theory, signal processing, and AI, is essential to fully unlock the potential of MA- and RA-enabled wireless systems and realize their envisioned role in next-generation intelligent and adaptive wireless networks.
Data availability
No datasets were generated or analysed during the current study.
References
Paulraj, A., Gore, D., Nabar, R. & Bolcskei, H. An overview of MIMO communications—a key to gigabit wireless. Proc. IEEE 92, 198–218 (2004).
Larsson, E. G., Edfors, O., Tufvesson, F. & Marzetta, T. L. Massive MIMO for next generation wireless systems. IEEE Commun. Mag. 52, 186–195 (2014).
Wang, Z. et al. A tutorial on extremely large-scale MIMO for 6G: fundamentals, signal processing, and applications. IEEE Commun. Surv. Tutor. 26, 1560–1605 (2024).
Lu, H. et al. A tutorial on near-field XL-MIMO communications toward 6G. IEEE Commun. Surv. Tutor. 26, 2213–2257 (2024).
Zhu, L., Ma, W. & Zhang, R. Modeling and performance analysis for movable antenna enabled wireless communications. IEEE Trans. Wireless Commun. 23, 6234–6250 (2024).
Zhu, L., Ma, W. & Zhang, R. Movable antennas for wireless communication: opportunities and challenges. IEEE Commun. Mag. 62, 114–120 (2024).
Ma, W., Zhu, L. & Zhang, R. MIMO capacity characterization for movable antenna systems. IEEE Trans. Wireless Commun. 23, 3392–3407 (2024).
Shao, X., Jiang, Q. & Zhang, R. 6D movable antenna based on user distribution: modeling and optimization. IEEE Trans. Wireless Commun. 24, 355–370 (2025).
Shao, X. & Zhang, R. 6DMA enhanced wireless network with flexible antenna position and rotation: opportunities and challenges. IEEE Commun. Mag. 63, 121–128 (2025).
Zhang, Y. et al. A highly pattern-reconfigurable planar antenna with 360° single- and multi-beam steering. IEEE Trans. Antennas Propag. 70, 6490–6504 (2022).
Ying, K. et al. Reconfigurable massive MIMO: harnessing the power of the electromagnetic domain for enhanced information transfer. IEEE Wireless Commun. 31, 125–132 (2024).
Heath, R. W. Jr. et al. The tri-hybrid MIMO architecture. IEEE Wireless Commun. https://doi.org/10.1109/MWC.2025.3627138 (early access, 2025).
Chen, K., Qi, C. & Dobre, O. A. DBRAA: Sub-6 GHz and millimeter wave dual-band reconfigurable antenna array for ISAC. IEEE Trans. Commun. (early access, 2025). https://doi.org/10.1109/TCOMM.2025.3567007.
Zhu, L. et al. A tutorial on movable antennas for wireless networks. IEEE Commun. Surv. Tutor. (early access, 2025). https://doi.org/10.1109/COMST.2025.3546373.
Shao, X. et al. A tutorial on six-dimensional movable antenna for 6G networks: Synergizing positionable and rotatable antennas. IEEE Commun. Surveys Tuts. (early access, 2025). https://doi.org/10.1109/COMST.2025.3602939.
Chen, K., Qi, C., Hong, Y. & Yuen, C. REMAA: reconfigurable pixel antenna-based electronic movable-antenna arrays for multiuser communications. IEEE Trans. Commun. (early access, 2025). https://doi.org/10.1109/TCOMM.2025.3592593.
Zheng, P., Zhang, Y., Al-Naffouri, T. Y., Hossain, M. J. & Chaaban, A. Tri-hybrid multi-user precoding based on electromagnetically reconfigurable antennas. arXiv preprint arXiv:2505.02254 (2025).
Castellanos, M. R., Yang, S., Chae, C.-B. & Heath Jr, R. W. Embracing reconfigurable antennas in the tri-hybrid MIMO architecture for 6G and beyond. IEEE Trans. Commun. 1–21 (early access, 2025). https://doi.org/10.1109/TCOMM.2025.3621272.
International Telecommunication Union—Radiocommunication Sector. Recommendation ITU-R M.2160-0 M series: mobile, radiodetermination, amateur and related satellite services - framework and overall objectives of the future development of IMT for 2030 and beyond. ITU Publications - Recommendations (2023).
Li, Z. et al. Movable antennas enabled ISAC systems: Fundamentals, opportunities, and future directions. IEEE Wireless Commun. (early access, 2025). https://doi.org/10.1109/MWC.002.2400522.
Fu, M., Zhu, L. & Zhang, R. Extremely large-scale movable antenna-enabled multiuser communications: Modeling and optimization. arXiv preprint arXiv:2506.02735 (2025).
New, W. K. et al. A tutorial on fluid antenna system for 6G networks: encompassing communication theory, optimization methods and hardware designs. IEEE Commun. Surv. Tutor. 27, 2325–2377 (2025).
Ding, Z., Schober, R. & Vincent Poor, H. Flexible-antenna systems: a pinching-antenna perspective. IEEE Trans. Commun. (early access, 2025). https://doi.org/10.1109/TCOMM.2025.3555866.
Liu, Y. et al. Pinching-antenna systems (PASS): Architecture designs, opportunities, and outlook. arXiv preprint arXiv:2501.18409 (2025).
Ning, B. et al. Movable antenna-enhanced wireless communications: General architectures and implementation methods. IEEE Wireless Commun. 32, 108–116 (2025).
Ojaroudi Parchin, N., Jahanbakhsh Basherlou, H., Al-Yasir, Y. I. A., M. Abdulkhaleq, A. & A. Abd-Alhameed, R. Reconfigurable antennas: switching techniques-a survey. Electronics 9, 336 (2020).
Jin, G., Li, M., Liu, D. & Zeng, G. A simple planar pattern-reconfigurable antenna based on arc dipoles. IEEE Antennas Wireless Propag. Lett. 17, 1664–1668 (2018).
Zhu, L., Ma, W., Xiao, Z. & Zhang, R. Movable antenna enabled near-field communications: Channel modeling and performance optimization. IEEE Trans. Commun. 73, 7240–7256 (2025).
Zheng, B., Wu, Q. & Zhang, R. Rotatable antenna enabled wireless communication: Modeling and optimization. arXiv preprint arXiv:2501.02595 (2025).
Zheng, B. et al. Rotatable antenna enabled wireless communication and sensing: Opportunities and challenges. IEEE Wireless Commun. https://doi.org/10.1109/MWC.2025.3611919 (early access, 2025).
Wu, Q., Zhang, S., Zheng, B., You, C. & Zhang, R. Intelligent reflecting surface-aided wireless communications: a tutorial. IEEE Trans. Commun. 69, 3313–3351 (2021).
Shlezinger, N., Alexandropoulos, G. C., Imani, M. F., Eldar, Y. C. & Smith, D. R. Dynamic metasurface antennas for 6G extreme massive MIMO communications. IEEE Wireless Commun. 28, 106–113 (2021).
Deng, R. et al. Reconfigurable holographic surfaces for future wireless communications. IEEE Wireless Commun. 28, 126–131 (2021).
Gong, T. et al. Holographic mimo communications: theoretical foundations, enabling technologies, and future directions. IEEE Commun. Surv. Tutor. 26, 196–257 (2024).
Lotfi, P., Soltani, S. & Murch, R. D. Printed endfire beam-steerable pixel antenna. IEEE Trans. Antennas Propag. 65, 3913–3923 (2017).
Zhang, Y. et al. Movable antenna-aided hybrid beamforming for multi-user communications. IEEE Trans. Veh. Technol. 74, 9899–9903 (2025).
Zhu, L., Sun, H., Ma, W., Xiao, Z. & Zhang, R. Multiuser communications aided by cross-linked movable antenna array: Architecture and optimization. IEEE Trans. Wireless Commun. https://doi.org/10.1109/TWC.2025.3626388 (early access, 2025).
Ma, W., Zhu, L. & Zhang, R. Compressed sensing based channel estimation for movable antenna communications. IEEE Commun. Lett. 27, 2747–2751 (2023).
Xiao, Z. et al. Channel estimation for movable antenna communication systems: a framework based on compressed sensing. IEEE Trans. Wireless Commun. 23, 11814–11830 (2024).
Wang, Z., Liu, L. & Cui, S. Channel estimation for intelligent reflecting surface assisted multiuser communications: framework, algorithms, and analysis. IEEE Trans. Wireless Commun. 19, 6607–6620 (2020).
Swindlehurst, A. L., Zhou, G., Liu, R., Pan, C. & Li, M. Channel estimation with reconfigurable intelligent surfaces-a general framework. Proc. IEEE 110, 1312–1338 (2022).
Zhu, L., Ma, W. & Zhang, R. Movable-antenna array enhanced beamforming: Achieving full array gain with null steering. IEEE Commun. Lett. 27, 3340–3344 (2023).
Ma, W., Zhu, L. & Zhang, R. Movable antenna enhanced wireless sensing via antenna position optimization. IEEE Trans. Wireless Commun. 23, 16575–16589 (2024).
Shao, X. et al. Distributed channel estimation and optimization for 6D movable antenna: Unveiling directional sparsity. IEEE J. Sel. Topics Signal Process. 19, 349–365 (2025).
Shao, X., Zhang, R., Jiang, Q. & Schober, R. 6D movable antenna enhanced wireless network via discrete position and rotation optimization. IEEE J. Sel. Areas Commun. 43, 674–687 (2025).
Xiao, Z., Pi, X., Zhu, L., Xia, X.-G. & Zhang, R. Multiuser communications with movable-antenna base station: Joint antenna positioning, receive combining, and power control. IEEE Trans. Wireless Commun. 23, 19744–19759 (2024).
Khoso, I. A., He, Z., He, Y. & Guizani, M. Capacity enhancement in irregular RIS-assisted wireless networks using standard and improved particle swarm optimization. IEEE Trans. Veh. Technol. (early access, 2025). https://doi.org/10.1109/TVT.2025.3619115.
Hoang, M. K. et al. Firefly algorithm for movable antenna arrays. IEEE Wireless Commun. Lett. 13, 3157–3161 (2024).
Xiao, Z. et al. Movable antenna aided NOMA: joint antenna positioning, precoding, and decoding design. IEEE Trans. Wireless Commun. 1–18 (early access, 2025). https://doi.org/10.1109/TWC.2025.3612424.
Zhu, L., Ma, W., Ning, B. & Zhang, R. Movable-antenna enhanced multiuser communication via antenna position optimization. IEEE Trans. Wireless Commun. 23, 7214–7229 (2024).
Hu, G., Wu, Q., Xu, K., Si, J. & Al-Dhahir, N. Secure wireless communication via movable-antenna array. IEEE Signal Process. Lett. 31, 516–520 (2024).
Zhu, F. et al. Robust beamforming for RIS-aided communications: gradient-based manifold meta learning. IEEE Trans. Wireless Commun. 23, 15945–15956 (2024).
Feng, B., Wu, Y., Xia, X.-G. & Xiao, C. Weighted sum-rate maximization for movable antenna-enhanced wireless networks. IEEE Wireless Commun. Lett. 13, 1770–1774 (2024).
Deng, R., Di, B., Zhang, H., Tan, Y. & Song, L. Reconfigurable holographic surface-enabled multi-user wireless communications: amplitude-controlled holographic beamforming. IEEE Trans. Wireless Commun. 21, 6003–6017 (2022).
Wu, Q. & Zhang, R. Intelligent reflecting surface enhanced wireless network via joint active and passive beamforming. IEEE Trans. Wireless Commun. 18, 5394–5409 (2019).
Mei, W., Wei, X., Ning, B., Chen, Z. & Zhang, R. Movable-antenna position optimization: a graph-based approach. IEEE Wireless Commun. Lett. 13, 1853–1857 (2024).
Lim, B. & Vu, M. Distributed graph-based learning for user association and beamforming design in multi-RIS multi-cell networks. IEEE Trans. Wireless Commun. 24, 6118–6134 (2025).
Yang, S., Lyu, W., Ning, B., Zhang, Z. & Yuen, C. Flexible precoding for multi-user movable antenna communications. IEEE Wireless Commun. Lett. 13, 1404–1408 (2024).
Yang, S. et al. Flexible WMMSE beamforming for MU-MIMO movable antenna communications. IEEE Trans. Wireless Commun. 73, 4479–4491 (2025).
You, Y. et al. Structured OMP for IRS-assisted mmwave channel estimation by exploiting angular spread. IEEE Trans. Veh. Technol. 71, 4444–4448 (2022).
Chen, X., Feng, B., Wu, Y., Kwan Ng, D. W. & Schober, R. Joint beamforming and antenna movement design for moveable antenna systems based on statistical CSI (2023). Paper presented at the IEEE Global Commun. Conf. Kuala Lumpur, Malaysia, 4–8 Dec. 2023.
Yan, G., Zhu, L. & Zhang, R. Movable antenna aided multiuser communications: Antenna position optimization based on statistical channel information. IEEE Trans. Commun. https://doi.org/10.1109/TCOMM.2025.3638653 (early access, 2025).
An, J. et al. Codebook-based solutions for reconfigurable intelligent surfaces and their open challenges. IEEE Wireless Commun. 31, 134–141 (2024).
Hwang, S., Park, J. & Lee, C. Movable-antenna-array-aided hierarchical codebook design (2024). Paper presented at the 9-th IEEE Int. Conf. Consum. Electron.-Asia, Danang, Vietnam, 3–6 Nov. 2024.
Shahriari, B., Swersky, K., Wang, Z., Adams, R. P. & de Freitas, N. Taking the human out of the loop: A review of Bayesian optimization. Proc. IEEE 104, 148–175 (2016).
Liu, S. et al. A primer on zeroth-order optimization in signal processing and machine learning: principals, recent advances, and applications. IEEE Signal Process. Mag. 37, 43–54 (2020).
Zeng, X., Fang, J., Wang, P., Mei, W. & Liang, Y.-C. A derivative-free position optimization approach for movable antenna multi-user communication systems. arXiv preprint arXiv:2505.19012 (2025).
Wang, C. et al. AI-empowered fluid antenna systems: opportunities, challenges, and future directions. IEEE Wireless Commun. 31, 34–41 (2024).
Weng, C., Chen, Y., Zhu, L. & Wang, Y. Learning-based joint beamforming and antenna movement design for movable antenna systems. IEEE Wireless Commun. Lett. 13, 2120–2124 (2024).
Yang, H. et al. Deep reinforcement learning-based intelligent reflecting surface for secure wireless communications. IEEE Trans. Wireless Commun. 20, 375–388 (2021).
Adhikary, A. et al. An artificial intelligence framework for holographic beamforming: Coexistence of holographic MIMO and intelligent omni-surface (2023). Paper presented at the 37-th Int. Conf. Inf. Networking, Bangkok, Thailand, 11–14 Jan. 2023.
Ahmadzadeh, M. et al. Enhanced over-the-air federated learning using AI-based fluid antenna system. arXiv preprint arXiv:2407.03481 (2025).
Creswell, A. et al. Generative adversarial networks: an overview. IEEE Signal Process. Mag. 35, 53–65 (2018).
Wang, C., Wong, K.-K., Li, Z., Jin, L. & Chae, C.-B. Large language model empowered design of fluid antenna systems: Challenges, frameworks, and case studies for 6G. IEEE Wireless Commun. 1–9 (early access, 2025). https://doi.org/10.1109/MWC.2025.3600949.
Channel measurement, modeling, and performance evaluation for terahertz fluid antenna systems. IEEE J. Select. Areas Commun. 1–14 (early access, 2025). https://doi.org/10.1109/JSAC.2025.3619035.
Dai, Q. et al. A demo of radar sensing aided rotatable antenna for wireless communication (2025). Paper presented at the 5-th Int. Conf. Electron., Circuits Inf. Eng., Guangzhou, China, 23–25 May 2025.
Shen, Y. et al. Design and implementation of mmwave surface wave enabled fluid antennas and experimental results for fluid antenna multiple access. arXiv preprint arXiv:2405.09663 (2024).
Acknowledgements
This work was supported by the National Natural Science Foundation of China (NSFC) under grant number 61827901 and the National University of Singapore under Research Grant A-8003646-00-00.
Author information
Authors and Affiliations
Contributions
L.Z., Z.X., and R.Z. conceived the outline; L.Z. and H.M. wrote the paper; G.Y. and W.M. conducted field tests and simulations. All authors confirm the approval of the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zhu, L., Mao, H., Yan, G. et al. Movable and reconfigurable antennas for 6G: unlocking electromagnetic-domain design and optimization. npj Wirel. Technol. 2, 5 (2026). https://doi.org/10.1038/s44459-025-00017-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s44459-025-00017-8
