
Abstract
Managing traffic effectively is one of the key challenges in building smarter, more sustainable cities. This paper presents a hybrid model designed to enhance traffic prediction and classification through more intelligent data analysis. The method utilises machine learning techniques, such as Support Vector Machines (SVMs) and Artificial Neural Networks (ANNs), and combines them to enhance their performance through decision-level integration and improved feature selection methods. The proposed approach is tested on a real-world dataset comprising 1243 traffic records, yielding improved performance using traditional measures of accuracy, sensitivity, and specificity. The achieved performance highlights the importance of integrating multiple intelligent approaches at the decision level, enabling the system to adapt to real-time changes in traffic conditions. Performance evaluations, with their standard deviations, demonstrate the superiority of our model (accuracy: 98.6%, sensitivity: 98.8%, and specificity: 98.2%). The proposed hybrid fuzzy decision fusion model is efficient in real-time and has been proven robust for Lahore’s environment. The proposed model is specifically designed for mid-scale urban locations that are experiencing rapid growth, sharing the same infrastructure and resource characteristics as Lahore. To generalise it to smart cities, the model requires datasets from those cities to validate and then apply it effectively.
Similar content being viewed by others
Introduction
Smart city have created intelligent environments that enhance daily urban services, including transportation, healthcare, and entertainment1. At the heart of this change lies the convergence between Intelligent Transportation Systems (ITS) and the Internet of Things (IoT), which involves connecting sensors, cameras, and vehicles to exchange real-time information and support more efficient decision-making processes and mobility in cities2. ITS is playing an increasingly inevitable role in smart cities, as it addresses the growing need for effective transportation to alleviate traffic congestion and optimise resources.
Different types of machine learning (ML) have been investigated to facilitate predictive traffic management in the context of Intelligent Transportation Systems (ITS). Specifically, Support Vector Machines (SVMs), Artificial Neural Networks (ANNs), k-Nearest Neighbours (k-NN), Support Vector Regression (SVR), and Regression Trees, frequently reinforced by deep feature-level fusion3, are considered to be the most successful ones in terms of classification performance. In a recent work, MSEFF-Net was proposed for SAR image-based aircraft detection by accounting for the scale variation and complex background. Other modules of the model include proposed attention module (NAFAM), multiple-scale feature fusion, and global–local context aggregation. Experimental results on SAR-Aircraft-1.0 and SADD show higher accuracy compared to current detection models, such as Faster R-CNN and YOLO4. ANN, which imitates human neural networks, is also capable of adaptability. Inspired by this, a Parallel Convolution Residual (PCR) network was introduced for enhanced traffic flow prediction considering more complex spatial–temporal dependencies. It provides an enhanced data sampling and early fusion mechanism, as well as embedded external features representations. The proposed model even surpasses state-of-the-arts on datasets such as TaxiBJ and BikeNYC with a smaller number of parameters5.It possesses self-learning capabilities, a multilayered architecture comprising an input layer, hidden layers, and an output layer, and is applicable to complex and nonlinear traffic data6,7,8,9.
Furthermore, advanced learning techniques have been employed in ITS, including reinforcement learning, which enables systems to maximise long-term payoffs through sequential decisions. These techniques are powerful but very demanding in terms of storage and computer time10. Here, the outputs from several classifiers can be combined using decision-level fusion strategies to increase accuracy and robustness. By integrating decisions from multiple sensor modalities11,12, the reliability of traffic prediction is improved using this approach.
However, despite numerous studies on ITS and ML-based traffic prediction models, a clear research gap remains in demonstrating interpretable and computationally efficient models tailored explicitly for mid-size cities with limited data resources. Prior research has primarily focused on deep learning approaches, such as Long Short-term Memory (LSTM)13, Graph Neural Networks (GNNs)14, and Transformer-based architectures. Although these approaches are powerful, they are often opaque, hardware-intensive, and less suitable for direct real-world deployment in low-resource urban environments. Furthermore, while hybrid models using SVM and ANN have been explored, very few have implemented decision-level fusion with fuzzy logic for improved interpretability and decision transparency in smart transportation systems.
Smart city traffic management
As urbanisation ramps up, cities all over the world are struggling to deliver adequate transportation. Growing traffic jams, characteristic of congested commutes, are a daily fact of life for many commuters and a common headache for cities and civic planners. Lost labour, added travel time, air pollution, and safety issues are some of the byproducts of such widespread congestion. To address such concerns, the concept of smart cities has emerged cities that utilise technology and data-driven approaches designed to enhance urban life. The S2TAT network is proposed as an extension of traditional graph-like traffic models, which fail to capture nonlocal spatiotemporal processes. The model synchronously models spatial and temporal relations, integrating timewise graph convolution with multi-head attention to better infer heterogeneous and long-term traffic patterns. An analysis of the PeMS datasets shows that S2TAT reaches a higher precision level than current state-of-the-art approaches with a lesser computational load11. However, a significant void still exists for smart traffic solutions in the developing world, where resource scarcity precludes the practical use of sophisticated deep learning systems. Thus, there is potential demand in the industry for a light, digestible, and high-accuracy hybrid model that aims to achieve traffic prediction without requiring a large amount of data or computational resources.
Conventional approaches for predicting traffic
Conventional traffic management systems are rule-based and static, operating with preset times for traffic signals and monitored at a relatively low level by personnel. Conventional models cannot swallow such gigantic and dissimilar datasets produced from current transport excerpts. Real-time: Cambridge will support traditional (reactive) event management, such as traffic alarms, with real-time solutions that enable proactive management of the road network in conditions of both traffic and road events. In addition, these types of approaches cannot learn from historical data or adapt to new urban dynamics, which is very limiting in dynamic environments. Furthermore, these rule-based systems do not provide the flexibility and extensibility necessary for the next generation of smart cities. A switch from rigid paradigms to intelligent, data-driven approaches that can accommodate the spatiotemporal aspects of traffic demand is necessary15.
The role of ML and IoT in traffic systems
ML and IoT technologies have been integral to smart cities, presenting possibilities for intelligent traffic management. The data comes from a variety of sources, including IoT devices such as traffic cameras, in-road sensors, and GPS systems, which constantly gather real-time traffic data, including vehicle speeds, lane occupancy, weather conditions, and congestion levels. While abundant in information, these data streams are often noisy, incomplete, and high-dimensional, necessitating sophisticated computational methods for effective analysis.
Although newer deep learning architectures, such as LSTM, CNNs16, and attention-based models, have demonstrated strong performance in traffic prediction tasks, they often suffer from high computational costs, a lack of interpretability, and a dependency on large-scale datasets. These factors make them less suitable for deployment in realtime ITS systems in resource-constrained environments.
Many of these limitations can be addressed by combining the strengths of these algorithms in hybrid models and using fuzzy logic to improve decision-making. Fuzzy logic represents a reasoning approach that works under imprecise conditions, enabling a framework that allows multiple model outputs to be synthesized. This leads to post-hoc interpretability, a key element for deploying models into real-world use cases.
Research objectives
This paper proposes a novel hybrid decision-level fusion framework that leverages the predictive capabilities of SVM and ANN through fuzzy logic to enhance traffic predictions in smart city environments. This research specifically addresses the following objectives:
-
1.
To study and implement a hybrid ML model that leverages SVM and ANN for traffic prediction.
-
2.
To apply fuzzy logic for decision-level fusion to make it more robust and interpretable.
-
3.
To evaluate the proposed model using a real-life IoT-based traffic dataset collected from Lahore, Pakistan.
-
4.
To assess the effectiveness of the new model using standard metrics and compare it with other models.
This research focused on intelligent, efficient, and sustainable transportation systems, aligning itself with the overall vision of smart infrastructure in urban areas.
Motivation and contributions
The rapid advancement of smart city infrastructure necessitates the development of intelligent traffic systems that not only enhance mobility but are also adaptable to diverse urban environments, particularly in resource-constrained settings. Many existing ITS solutions rely heavily on advanced deep learning architectures such as GNNs or transformer-based models. While these techniques demonstrate strong predictive performance, they often require large volumes of labelled data, significant computational power, and extensive training time. These constraints limit their practicality and accessibility for mid-sized cities or developing nations that may lack the technical and infrastructural capacity to support such systems.
In the face of these challenges, this work aims to contribute a low-cost, interpretable, and computationally feasible hybrid ML model specifically adapted for real-time traffic prediction in urban areas with resource constraints. The proposed model leverages the advantages of SVM and ANN, combining the two classifiers using fuzzy logic at the decision level. This method enables the delivery of accurate predictions with low computational cost and improved interpretability, two crucial prerequisites for real-world deployment and stakeholder confidence.
The main contributions of this study can be summarized as follows. First, it introduces a new hybrid traffic forecasting method that combines the prediction of SVM and ANN with a fuzzy decision-making strategy. Second, it fills the current gap in the literature by considering lightweight, interpretable, and scalable models that can be possibly applied in developing urban infrastructures. Third, it illustrates the relevance through a case study using real IoT sensor-based traffic data from across Lahore, Pakistan, thereby demonstrating the validity and practicality of the model. Finally, it indicates that decision-level fusion can not only improve the accuracy of prediction, more importantly, it is conducive to explainable results that would help the system be more trustable and acceptable to more city planners or transportation authorities.
We select SVM and ANN as two core predictors due to their complementary strengths: SVM has the property of robustness with high-dimensional data and small-sized data, while ANN has the capability of capturing complex, non-linear relationships in traffic patterns. However, certain limitations, such as the sensitivity of SVM to noisy data and the interpretation problem of ANN, are well addressed by the decision-level fusion of fuzzy logic. Additionally, the explicit representation of important context features, such as time and weather, can further enhance the model’s predictive capability by effectively considering temporal and environmental variations.
This paper presents DFHITSSC, a hybrid traffic prediction framework for smart cities that fuses SVM and ANN outputs using a confidence-aware fuzzy logic approach. Designed for real-time and uncertain environments, the model spans six layers: Data Acquisition, Preprocessing, Classifier Prediction, Fuzzy Fusion, Cloud Storage, and Evaluation. “Literature review” section reviews related work, “Proposed methodology” section details the methodology, “Results and performance analysis” section presents results and benchmarks, “Discussion and comparative analysis” section discusses implications, and “Limitations of this study” section concludes the study.
Literature review
In addressing the state-of-the-art in traffic prediction, prior research indicates that traditional road traffic management schemes are becoming increasingly inadequate in the face of growing urban populations, resulting in severe congestion and related issues13. Several studies have explored ITS frameworks leveraging sensor data, IoT, and various machine learning techniques.
Recent studies have proposed sophisticated models, including Graph Neural Networks (GNNs), Transformer-based models, and Reinforcement Learning-based ITS frameworks, which have achieved better results in challenging spatial–temporal prediction tasks compared to traditional models. GCN and Transformer-based models for short-term traffic prediction, which exhibit better generalisation ability across different urban datasets. However, due to their high computational needs and lengthy setup times, deploying them in real-time is challenging and often not possible in resource-poor urban areas. Dealing with human-driven vehicles (HDVs) Those are required for the safe and efficient planning of the motion for AVs. Although a lot has been studied on driver prediction, the interactions between AVs and HDVs are seldom addressed and most of them assume that HDV’s trajectories are independent of AV’s decisions19.
Recent developments also include hybrid models of CNN, RNN, and GCN for improved spatial–temporal modelling; however, the computational cost is very high for such models17. A transformer-based model also shows potential in capturing long-distance traffic behaviours; however, it is more computationally expensive and harder to interpret.
Optimisation strategies, such as SVR parameter tuning and Histogram of Gradient feature computation, have further refined the prediction performance11. Complementing these efforts,20 proposed a two-layer artificial neural network (ANN) structure for delay predictions, highlighting areas for improvement in link delay estimation.
While hybridization techniques involving SVM-ANN combinations have been explored, few have integrated these under a decision-level fusion framework using fuzzy logic for real-world, live traffic settings. Our study builds on these by proposing a novel fuzzy decision-level fusion between SVM and ANN, optimized for environments prone to uncertainty.
Despite these advancements, a critical gap remains in integrating and comparing these diverse approaches under a unified decision-level fusion framework. Therefore, our study contributes to addressing this limitation by benchmarking SVM and ANN with fuzzy logic integration in a realtime, outdoor Pakistani setting, thereby bringing both practicality and performance improvements to the domain.
Traffic prediction using machine learning algorithms
The field of traffic condition forecasting has witnessed the significant potential of machine learning models for prediction. This has made Support Vector Machines (SVMs) popular in this task because they are robust in high-dimensional spaces and generalize well with limited data samples5. Inspired by the structure of biological neurons in the human brain, Artificial Neural Networks (ANNs) are a widely used approach, as they have the capability of learning complex, non-linear relationships that exist in traffic data6,7.
SVM and ANN are quite popular, yet each has its own deficiencies. SVM incorporates a kernel that creates a direct correlation for targets and performs poorly if the data is ambiguous or noisy. Although ANN is flexible, it requires good parameter tuning and large amounts of clean data to avoid overfitting8. However, these classical models are increasingly outperformed by more recent architectures, such as GNNs and Transformers, especially when large and diverse datasets are available.
Hybrid and fusion-based models
To address the limitations of single models, researchers have explored hybrid strategies. In9, a short-term congestion prediction model was proposed based on ensemble learning methods. He et al.10 showed that the SVR, ANN, and kNN based on deep feature-level fusion models are superior to single methods, but such models add complexity and reduce interpretability during realtime applications.
Other works have applied fuzzy logic at the decision level for fusion to mitigate uncertainties in traffic data. Roggen et al. This is particularly important, as the classification accuracy and effectiveness of classifiers would be evaluated in uncertain environments11. While feature selection hybridisation using SVM-ANN has been explored in past studies, the novelty of our approach lies in applying fuzzy decision logic post-prediction to enhance interpretability and performance in real-time urban traffic applications, especially in scenarios with missing or uncertain data.
Advanced models and optimization approaches
Recently, several advanced neural architectures, including Recurrently Connected Neural Structures (RCNN), Convolutional Neural Networks (CNN), and Graph Convolutional Networks (GCN), have been proposed for traffic forecasting. Kia et al.12 Focused on short-term traffic prediction using LSTM networks, and analysed the performance when the optimal number of input sensors is utilised.
Recent breakthroughs include transformer-based models such as Informer and Autoformer, which outperform RNNs in time-series forecasting by effectively capturing long-term dependencies. However, these models often lack robustness in highly uncertain or noisy environments. Reinforcement learning approaches, although powerful, require extensive training time and environmental modeling, which limits their realtime adoption.
Model testing and performance indicators
Studies such as13,14 highlight more relevant evaluation metrics like MAE and RMSE to validate model performance. Specifically, Chen et al.11 suggested optimising Histogram of Gradient (HOG) features for pedestrian traffic detection, whereas15 utilised a two-layer artificial neural network (ANN) model to predict delay, concluding that there is room for improvement in the estimation of link delay. Many earlier works neglect F1-score and precision-recall metrics, which are crucial for evaluating classifier performance in imbalanced traffic datasets, and our model explicitly addresses this.
Deep learning and meta-analytical insights in traffic forecasting
The adoption of deep learning approaches has largely driven recent advancements in traffic prediction. Several studies have explored the potential of neural network architectures for traffic flow estimation, route planning25, and real-time decision support. For instance, a robust deep learning architecture was proposed for traffic flow estimation using only a subset of link sensors, demonstrating how deep learning can compensate for partial or incomplete sensor coverage while still maintaining high predictive accuracy26. Similarly, deep learning has also been applied to the integrated problem of origin–destination estimation and traffic sensor location, where predictive modeling is combined with infrastructure optimization to improve traffic management efficiency27.
Afandizadeh et al.28 discuss deep learning algorithms and conventional models for traffic prediction and undertake a comprehensive review of 111 landmark studies from the 1980s. Their study on different traffic datasets and scenarios is shown as follow.Firstly, overview of the data origins in intelligent transportation using. Then it describes the theoretical rationale of fundamental algorithms (i.e., CNNs, LSTMs, autoencoders, and classical statistical methods) and reports its application to the forecast of traffic features. The study does point out the advantages and limitations of the two model types; it especially emphasises the importance of in-depth analysis, and it is argued that both types (deep learning and classical approaches) are useful tools, but they are context-specific. The results highlight the importance of careful model selection in future research and indicate the prospect of road traffic forecasting28.
Deep learning techniques are increasingly being used in transportation fields, but their performance often requires trial-and-error model tuning, and the choice of neural network architecture is also crucial. Aside from architecture i.e. network design, the accuracy of prediction also depends on the kind of data, sample size, geographical region, as well as the time spent to make predictions. To systematically address these issues, Varghese et al. (2020) performed a systematic meta-analysis of 136 studies with more than 2,300 cases. After employing linear mixed-effects models, they further examine how unobserved heterogeneities would have an effect of on predictive precision, showing that the predictive accuracy increases by about 5.9% for every 100 million data points when predicting and decreases by 5.3% for every 100-min delay of the forecasting period. Results of the study also demonstrated that models capable of taking into consideration spatiotemporal dependencies in transport phenomena significantly outperformed alternative machine learning-based models. This presents evidence of the relevance of data scale and temporal scope in Deep learning-based traffic forecasting, pointing to the context modellers have to take into account in practical intelligent transportation systems when applying such methods29.
Gaps in existing work
Although we have been making headway in the area, we still have several challenges ahead:
-
1.
Unavailability of realtime, integrated, multi-source data from IoT-enabled traffic sensors.
-
2.
Use of single-model prediction techniques and lack of effective fusion strategies to handle discrepancies in sensor data
-
3.
There are few studies testing hybrid ML models for real-world datasets emerging from the development of smart cities, more specifically in South Asia.
-
4.
A lack of comparative benchmarking with recent advanced models such as GNNs, Transformers, and RL-based frameworks, especially under real-world constraints.
-
5.
Insufficient citations in prior studies to support architectural choices, making model selection seem arbitrary. This study justifies its model choice based on interpretability, robustness under uncertainty, and realtime feasibility in the context of a smart city.
Position of the proposed work
To overcome the gaps above, we propose a decision-level hybrid approach that utilises fuzzy logic to combine the outputs of SVM and ANN, thereby achieving improved prediction accuracy and robustness. In contrast to previous models that perform diverse modelling only through feature-level fusion or ensemble learning, our model develops decision-level reasoning to achieve improved accuracies despite higher uncertainties. Furthermore, our method is validated in an outdoor scenario using a real-world dataset recorded in Lahore, Pakistan, providing an efficient and scalable solution for smart cities in terms of live traffic management. In contrast to previous works, our choice of model is not ad hoc, but rather motivated by a tradeoff among accuracy, computational complexity, and sensitivity to uncertainty. The SVM-ANN fuzzy with fusion has the potential to overcome the drawbacks of conventional and modern deep learning models, offering flexible decision-making, which is a promising solution in low-resource smart city applications.
Proposed methodology
This study introduces a hybrid machine learning framework for traffic prediction, specifically designed for smart city environments. The framework integrates Support Vector Machines (SVM) and Artificial Neural Networks (ANN) at the decision level through a fuzzy logic-based fusion mechanism. By combining these classifiers, the system reduces individual prediction errors and enhances resilience to the uncertainties commonly present in real-time traffic data.
The architecture of the proposed model is organized into six key layers:
-
1.
Data Acquisition—responsible for collecting traffic flow and sensor data.
-
2.
Preprocessing—ensuring data quality through filtering, normalization, and handling of missing values.
-
3.
Application Layer—where preliminary classification tasks are performed.
-
4.
Fusion Layer—implementing the fuzzy logic-based decision fusion.
-
5.
Cloud Storage—enabling scalable data storage and accessibility.
-
6.
Validation Layer—assessing model performance against benchmark metrics.
Together, these layers form a cohesive framework that supports robust, scalable, and real-time traffic prediction.
To validate the model’s effectiveness, statistical testing was employed. Paired t-tests were used to compare the F1-score and AUC values of the proposed hybrid model with those of baseline classifiers (SVM and ANN). This test was chosen because it directly measures differences in model performance on the same dataset, making it well-suited for head-to-head comparisons. A significance threshold of α = 0.05 was adopted, and differences with p < 0.01 were considered highly significant. This indicates that the probability of the observed improvements arising by chance is less than 1%, lending strong credibility to the reported performance gains.
The fuzzy logic-based fusion layer serves as the core innovation of this framework. Unlike traditional fuzzy systems, the proposed model incorporates traffic-specific triangular membership functions tailored to critical variables such as congestion density, incident likelihood, and time-based variability. These functions were calibrated using empirical traffic datasets, ensuring that the model remains sensitive to the dynamic nature of urban traffic patterns.
Additionally, a confidence-weighted rule set was developed to refine the decision fusion process. Rather than applying fixed rules, the system dynamically adjusts the influence of each base classifier according to its confidence level. This adaptive mechanism enables more reliable decision-making in environments where input data may be incomplete, noisy, or delayed. By embedding both customized membership functions and confidence-based fusion, the model not only achieves mathematical soundness but also delivers practical reliability in real-world traffic prediction scenarios.
System architecture
The proposed solution is a hybrid machine learning approach that combines Support Vector Machine (SVM) and Artificial Neural Network (ANN) algorithms with a fuzzy logic-based decision-level fusion system. Such a multi-layered hierarchical structure enhances prediction accuracy, robustness against imperfect data, and interpretability, ensuring usability for real-world smart city transportation systems.
The architecture contains the following high-level layers:
IoT data acquisition layer
Sensors embedded in road networks are IoT-enabled to gather real-time traffic data. This covers time-specific attributes (such as date and time), environmental factors (such as weather and temperature), and traffic aspects (such as lane count and vehicle movement (incoming/outgoing) information).
Pre-processing layer
Raw traffic data is cleaned, normalized, and transformed to address missing values and outliers. Even techniques, such as Min–Max scaling, are performed to prepare the data for training.
Encoding of time and weather features
To account for the influence of time and environmental factors, specific encoding methods were employed to capture traffic variability over the two years. The ‘time’ block (06:00–09:00, 12:00–14:00, 17:00–20:00, and non-peak) was divided into four bins. One-hot encoding was applied to both of these categories. Likewise, the ‘weather’ variable was grouped as Clear, Rainy, Cloudy, and Foggy conditions, and encoded as a categorical variable. The feature importance analysis revealed the shearing effects of the two particles, especially in rainy and foggy conditions, which improved the predictive capability and robustness of our hybrid model.
Application layer
SVM and ANN models are trained and evaluated separately on the pre-processed data. These models act as a binary classifier that predicts whether traffic congestion will occur (1) or not (0).
Fusion layer
The fuzzy inference system is fed with the binary results from SVM and ANN. Fuzzy rules are employed to derive the final traffic prediction based on integrated model responses, thereby enhancing resilience to uncertainty.
Cloud-based storage
It can incorporate model outputs, logs, and intermediate storage in a cloud infrastructure for real-time access and model deployment in smart city networks.
Validation layer
During real-time inference, fresh data from sensors is fed back into the same pipeline to predict traffic states, enabling proactive traffic management decisions to be made.
Custom fusion rule design
To improve the robustness and interpretability of traffic prediction, we developed a fuzzy inference module that smartly combines the output objects of the SVM classifier and ANN.
Although fuzzy logic has been widely applied in machine learning, we present a case-specific fuzzy model for traffic prediction. It was observed that triangular membership functions were tuned by traffic density thresholds, time-of-day variations and weather conditions, for context traffic information to be directly injected in the fusion. Second, a confidence-weighted rule is also designed such that in the situation where SVM and ANN predictions conflict, the one with higher calibrated confidence dominates. Third, the case when two classifiers give uncertain outputs was developed based on recent historical data in order to maintain its robustness. According to this hierarchical architecture, our model is more interpretable, robust, and can be applied in real time to resource-constrained smart city environments compared to common fuzzy designs.
The novelty of our approach is that we have tailored it specifically for traffic incident prediction, contrasting with generic fuzzy paradigms. Specifically: (i) Triangular membership functions that are customized using traffic-specific thresholds (e.g., congestion density, peak hours, weather condition, and so on) enable to better reflect urban traffic dynamism found in the real-world; (ii) Confidence-weighted fusion rules always give higher weights to the classifier (SVM or ANN) with stronger confidence, ensuring robust decision making in the case of conflicting information; (iii) an uncertainty-handling mechanism leverages historical traffic patterns in the short term when both classifiers’ outputs are uncertain to enhance robustness against noise and incomplete information; and (iv) the design of rules is lightweight and comprehensible on purpose, and hence, is ready for real-time deployment in resource-constrained and edge devices of smart cities.
Although fuzzy logic is an established paradigm, our fusion mechanism introduces new, tuned rule sets and confidence-based handling of memberships tailored for real-time traffic in resource-limited smart cities. We define the triangular membership functions for each model’s output with explainable thresholds:
-
No Traffic: [0.00, 0.45]
-
Uncertain: (0.45, 0.50]
-
Traffic: > 0.50
Each model’s output (ranging from 0 to 1) is fuzzified and passed into a set of decision rules:
-
If SVM = No Traffic and ANN = No Traffic → Output: No Traffic.
-
If SVM = Traffic and ANN = Traffic → Output: Traffic.
-
If SVM = No Traffic and ANN = Traffic and ANN Confidence > 0.6 → Output: Traffic.
-
If SVM = Traffic and ANN = No Traffic and SVM Confidence > 0.6 → Output: Traffic.
Otherwise → Output: Uncertain → defer to historical pattern weight.
This configuration ensures:
-
Interpretability: Explicit rule tracking.
-
Resilience: Handles disagreements by prioritizing stronger classifier confidence.
-
Scalability: Easily tunable across datasets.
The proposed model introduces a hybrid machine learning approach for feature selection and traffic prediction within Intelligent Transportation Systems (ITS) for smart cities. It integrates two supervised learning algorithms—Support Vector Machine (SVM) and Artificial Neural Network (ANN)—and employs fuzzy logic for decision-level fusion to enhance prediction accuracy and robustness. The model workflow is divided into two main phases: training and validation. In the training phase, traffic-related data is collected through IoT-enabled sensors and routed to the Data Acquisition Layer, where the features are labeled. Subsequently, the data enters the Pre-processing Layer, where raw inputs are normalized and missing values are handled using mean or median imputation techniques. After pre-processing, the cleaned dataset is passed to the Application Layer, where SVM and ANN algorithms are trained and evaluated independently. The outputs of these models are then fused using a fuzzy logic-based decision fusion module. The results of both the individual algorithms and the fused decisions are stored in the cloud for future use.
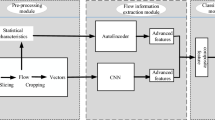
During the validation phase, realtime input is again acquired through the Data Acquisition Layer. The pre-trained models are retrieved from the cloud to predict traffic conditions based on new inputs. This prediction is validated against expected outputs to assess realtime performance. Figure 1 illustrates a schematic summary of this system, which shows the end-to-end data flow from acquisition to prediction and storage.

Proposed system diagram.
Figure 1 collects data from the Internet of Things (IoT) enabled sensors and is entered into the Data Acquisition Layer. All the features of traffic prediction are labeled. Furthermore, some data is in raw form. Data must be entered during a pre-processing phase, which includes normalization and handling missing values. After pre-processing, the data is further moved to the application layer. In the layer, the SVM and ANN algorithms are applied, and the results of these algorithms, as input, enter the Fusion model for the final output. The algorithms and the fusion model results are stored in a separate database.
Table 1 shows the input/output and the variable names from the data for the proposed model.
Mathematical formulation of traffic prediction
Support vector machine
SVM is one of the most common Supervised Learning Algorithms used for classification and regression problems. However, it is primarily used in machine learning classification concerns. The purpose of the SVM algorithm is to determine the optimal line or decision boundary that can divide the n-dimensional space into categories, allowing future research points to be conveniently assigned to the correct category. As we know the equation of a line is,
Since ‘s’ is a line slope and b is an intercept or a bias, \({su}_{1}-{u}_{2}+b=0\)
Now assume that \(\overline{u }=({u}_{1},{u}_{2}{)}^{T}\) and \(\overline{p }=\left(s,-1\right),\) The above expression can be expressed as Eq. (2).
The direction of the vector \(\overline{u }=({u}_{1}+{u}_{2}{)}^{T}\) is written as \(\overline{p }\) It can be written as in Eq. (3).
As we know,
\(\text{cos}\left(\theta \right)=\frac{{u}_{1}}{\Vert u\Vert }\) and (\(\alpha\))\(=\frac{{u}_{2}}{\Vert u\Vert }\)
So, Eq. (3) can be written as
The two-dimensional vector is shown, but the above equation indicates the n-dimensional point product. Let,
Then F, which is known as the functional margin of the dataset
The Lagrangian function is:
By simplifying the above two equations, we get
After putting the value of the Lagrangian function \(\zeta ,\) We get,
\(p\left(\alpha ,b\right)=\sum_{i=1}^{m}{\alpha }_{i-}\frac{1}{2}\sum_{i=1}^{m}\sum_{j=1}^{m}{\alpha }_{i}{\alpha }_{j}{v}_{i}{v}_{j}{u}_{i}{u}_{j}\) Thus,
Subject to \({\alpha }_{i}\ge 0, i=1\), 2, 3… m \(\sum_{i=0}^{m}{\alpha }_{i}{v}_{i}=0\)
We apply the Lagrangian approach to the Karush–Kuhn–Tucker (KKT) conditions due to the restricted inequalities. In the KKT equation, it says,
u* the optimal point, \(\alpha\) It is the positive value, and it is near zero for other points.
So
These are support vectors that are near the hyperplane. The above Eq. (10) says,
We get to point ‘b’ to measure,
By multiplying with \({v}_{i}\) On both sides, we get,
According to the rule, we are aware of this. \({v}_{i}^{2}=1\), so
H is the cumulative sum of vectors for support. We’ll derive a hyperplane from several points and then use it to estimate a particular point. Now, the hypothesis function is,
In the above equation (Eq. 15), the hyperplane + 1 indicates that traffic is predicted, and 0 indicates that no traffic is predicted.
Artificial neural network
In the pre-processing phase of the Artificial Neural Network (ANN), the dataset is divided into training and validation sets using a 70:30 ratio. The Levenberg–Marquardt algorithm is employed for training the model, utilising 90% of the training data and reserving the remaining 10% for testing and validation purposes. The network architecture comprises 12 input neurons and a single output neuron, which is responsible for predicting traffic conditions. The hidden layer consists of 10 neurons, followed by an output layer. If the predefined learning conditions are met, the model proceeds to retrain in the subsequent phase. The performance metrics \({\mathcal{P}}_{j},\) \({\mathcal{S}}_{k}\), and \({\mathcal{P}}_{k}\) They are computed using Eqs. (16), (17), (18), and (19), respectively.
Equation 18 indicates that the output layer input is obtained.
Equation 19 View the output layer activation feature.
Equation 20 displays the sum of all the squared error functions for the neuron output error measurement. where, \({\mathcal{P}}_{k}\) is the predicted output and \({\mathfrak{Z}}_{k}\) Is the desired output?
The error weights now have to be changed, which can be modified using the form in Eq. (21).
The weights of the hidden layer and the output layer are updated with Eq. (22).
Equation 22 is used to overwrite the values, which will acquire the importance of the modified weights, Eq. (23).
\({\varpi }_{k}\) Is the actual weight of \(k\) described in Eq. (24)
In Eqs. (25, 24) has been simplified.
where Eq. (26) shows \({\mathcal{G}}_{k}\)
Equations (27–30) update the weights between the neurons in the hidden and input layers.
As demonstrated in Eq. (31, 32) may be expressed in a more straightforward form.
The description of the value of \({\mathcal{G}}_{j}\) is given in Eq. (33)
The weights update formula in Eq. (34) is,
Weight and hidden layer updates can be written as in Eq. (35).
Save and validate the model using the 30% remaining dataset once the model has been trained.
Let the dataset be represented as:
where:
-
Xi: input feature vector at time iii, including speed, volume, time-of-day, weather, and sensor ID.fSVM and fANN individual classifiers.
-
yi: binary label indicating congestion state (1 = congestion, 0 = no congestion).fSVM and fANN individual classifiers.
-
N: number of instances. The objective is to learn a function f that predicts traffic state:
$$f(X_{i} ) = \hat{y}_{i} = f_{fuzzy} (f_{SVM} (X_{i} ),F_{ANN} (X_{i} ))$$(37)fSVM and fANN individual classifiers.
ffuzzy: fuzzy inference system performing decision-level fusion.
The learning objective is to minimize prediction error, formalized using binary cross-entropy loss:
To prevent overfitting and improve generalization, we introduce an L2 regularization term:
where λ: regularization coefficient, θ: model parameters (e.g., weights of SVM and ANN).
The IoT Traffic Simulator Dataset used in this study was collected by deploying IoT-based traffic sensors in our network of urban and suburban intersections in Lahore, Pakistan. Each data entry contains the time recorded, the number of vehicles in the flow, the average speed of the vehicle, the corresponding sensor ID, and basic environmental conditions. Pre-making did occur on the following:
Handled nulls: All records with null values were deleted. Fewer than 5% of entries were impacted.
Noise Filtering: Outliers in vehicle count and speed were eliminated through z-score filtering (threshold ± 3).
Timestamp Normalisation: Time values were aggregated into categorical bins (e.g., night, peak, off-peak) to ensure compatibility with the fuzzy rules’ inputs.
By using this method, congestion labels (1 = congestion, 0 = no congestion) were assigned to each lane based on the threshold value (> 70 vehicles/min = congestion) using label encoding.
Scaling: We performed Min–Max scaling, as the model input should have an identical standard.
We used Min–Max normalisation to scale all numerical input features to the [0, 1] interval, ensuring that all numerical input features contribute equally during model training. This was especially important for the SVM classifier, which is sensitive to the magnitude of the features. Normalization was performed on variables like vehicle count, average speed, and time indicators according to the following equation:
Results and performance analysis
For simulation work, MATLAB 2020b is used. The data set used in this research is sourced from the city of Lahore, Pakistan. The dataset consists of 1243 instances of traffic. The result and simulation sections include SVM, ANN, and the proposed model. The performance of the models is calculated using confusion matrix parameters, which are mentioned below:
Table 2 shows the performance comparison results of SVM, ANN, and DFHITSSC. The explicit discrimination of the standard deviations indicates the reliability and consistency of the model, as well as its statistically significant performance in the independent validation subsets.
Table 2 shows the different evaluation performance parameters of SVM, ANN, and the proposed model. It observed that SVM yields an accuracy of 0.986, a sensitivity of 0.988, a specificity of 0.982, a positive predictive value of 0.989, a negative predictive value of 0.980, a false-positive rate of 0.017, a false-negative rate of 0.011, an F-measure of 0.988, and an error rate of 0.013.
Similarly, ANN achieves an accuracy of 0.979, a sensitivity of 0.998, a specificity of 0.947, positive predictive values of 0.969, negative predictive values of 0.996, a False positive rate of 0.052, a false negative rate of 0.001, an f-measure of 0.983, and an error rate of 0.020. The proposed DFHITSSC model yields an accuracy of 0.986, a sensitivity of 0.988, a specificity of 0.982, positive predictive values of 0.989, negative predictive values of 0.980, a false-positive rate of 0.017, a false-negative rate of 0.011, an F-measure of 0.988, and an error rate of 0.013. All listed metrics indicate that SVM and the proposed model yield identical classification outcomes for the dataset used, despite being presumably different methods.
Dataset description
The dataset used in this research contains real-world IoT-based sensor data collected from several intersections in Lahore, Pakistan. Sensors: Camera-based and infrared traffic monitoring sensors were deployed in the metropolitan and suburban main locations, constantly recording the number of vehicles, their position in the lane, lane direction, timestamp, temperature, and weather type. Each data instance is organised into categorical and numeric features, which ensures easy analysis of the data by modellers. Sample excerpts from our IoT-based traffic dataset are presented in Table 3 to help understand the attributes observed from the data, which include sensor locations, timestamps, traffic flow, environmental conditions, and categorical congestion-associated labels. This verbose format makes data structure more explicit, and is beneficial for reproducibility.
The simulation-based working and results of SVM, ANN, and the proposed model are below:
SVM-based simulation
Support Vector Machine (SVM) is implemented with fivefold cross-validation to ensure robust model evaluation. The dataset is partitioned into five equal subsets, where each subset serves as the validation set once, while the remaining four subsets are used for training. This process is repeated five times, allowing each data point to be used for both training and validation. This approach enhances the model’s generalizability and minimizes overfitting. SVM utilizes a hyperplane to separate the input feature space into distinct classes, thereby predicting the output class with optimal margin separation. In addition to the regular fivefold cross validation, we used data split based on time periods in order to assess model consistency across different times. The dataset was divided by time into two parts: the first 70% of records (earliest dates) were used for training, while the other part containing 30% was kept as a holdout test set. This simulates real-world deployment scenarios, where separate training and validation sets are used: we train our model on a specific traffic condition (slightly moist), but then test it in unseen future conditions (moderate weather). When combined with cross-validation, this temporal split increases the generalization ability of your model and minimizes data leakage or overfitting on random samples. This validation strategy was selected to counterbalance statistical stringency against the small size of the dataset (1243 examples).
Table 4 presents all the SVM models used to predict our dataset. The highest accuracy achieved by SVM is 98.6%, while the lowest acceptable accuracy is 86.7%.
In Table 5, SVM, using fivefold cross-validation, has 1243 records of instances. SVM predicts 772 instances as true positives and 454 instances as true negatives. Similarly, for false positives, 8 cases and 9 cases are indicated as false negatives.
ANN-based simulation
The same dataset used for SVM is also used for ANN. In ANN, the dataset is divided into 70% for the training phase and 30% for validation. The training phase consists of 870 instances in which the ANN predicts 545 as true positives and 307 as true negatives. Similarly, for false positives, 17 cases and one instance are indicated as false negatives. The training phase of the ANN is shown in Table 6:
The validation phase consists of a dataset of 373 instances of traffic, in which the ANN predicts 231 instances as true positives and 142 instances as true negatives. Additionally, it indicates 16 cases as false positives and 4 cases as false negatives. The validation phase of ANN is shown in Table 7:
The calculated Mean Square Error (MSE) in ANN is 2.46045e^(-2) and Regression is 9.46306e^(-1). Both of above these model SVM and ANN outputs are used in Fuzzy Logic as input for decision and measure the accuracy, sensitivity, specificity, positive predicted values, negative predicted values, false-positive rate, false-negative rate, f-measure, and error rate, which are the parameters of the confusion matrix of the proposed model.
Proposed model with fuzzy logic designer-based simulation
The proposed model gives fusion results based on SVM and ANN. The output of both models, SVM and ANN, is used as input for fuzzy prediction to determine whether traffic will occur or not. The dataset is not required in fuzzy logic, which is used in decision-making. Membership functions are used in a fuzzy environment. After defining the membership function, create rules depending on the membership of input and output variables. Based on the output of SVM and ANN, fuzzy logic will be used to determine whether the traffic is predicted or not. The following are the membership functions of the proposed model, as listed in Table 8.
Mathematical fuzzy-based decisions can be written as follows:
In Eq. (36) above. μ_SVM is the member function of SVM, and μ_(ANN ) is the member function of ANN. Both models yield fuzzy results, and then the DLF determines whether the traffic is predicted or not. The output parameters of SVM and ANN are 0 and 1. According to these parameters, the rules of fuzzy logic are:
R_dlf^1 = If SVM has no traffic predicted and ANN also has no traffic predicted, then there is no traffic predicted.
R_dlf^2 If SVM has traffic predicted and ANN also has traffic predicted, then traffic is predicted.
Figure 2 represents the decision-level fusion lookup diagram for predicting traffic in instances.

Lookup diagram.
In Fig. 3, the predicted traffic output consists of SVM and ANN. There is no traffic chance if SVM is 0 to 0.45 and ANN is also 0 to 0.45. And in all remaining conditions, there is a chance of predicting traffic

Surface diagram.
Figure 4 represents the contrast of previous research work related to link delay estimation and NN for delay prediction3. Moreover, MSR2C-ABPNN21 with the proposed model in terms of accuracy, miss rate, and MSE. In link delay estimation23, the calculated accuracy was 78.12%, the miss rate was 21.88%, and the MSE was 2.751. In NN for delay prediction22, the computed accuracy was 91.265%, the miss rate was 8.732%, and the MSE was 1.015. And the third comparison model was MSR2C-ABPNN21, having calculated accuracy was 96.2%, a miss rate was 3.8%, and the MSE was \({8.261\times 10}^{-2}\). The proposed DFHITSSC model has an accuracy of 98.6% with a miss rate of 1.3% and an MSE of \({9.46306\times 10}^{-1}\).

Comparison of previous approaches.
Real-time estimation of bus waiting time, which is crucial for both intelligent transportation systems and user satisfaction, suffers from the high cost of sensors and the complexity of traffic22. Vehicle heterogeneity is usually ignored by traditional traffic flow prediction models, which limits their predictive accuracy in dynamic situations. This work proposes a spatiotemporal model that utilises visual traffic features, including vehicle composition and accumulation, to estimate flow density23 accurately.
Support Vector Machines (SVMs) and Artificial Neural Networks (ANNs) have been chosen because they complement each other in handling the high-dimensional, non-linear nature of traffic data and are well-suited for real-time applications. We found that SVM and ANN outperform deep learning models (such as LSTM or CNN), which require large sequential datasets and numerous hyperparameters to tune, and extensive computational power to operate. This illustrates the superiority of speed and lightweight alternatives, which are better suited for IoT-based traffic data sets of scale and size. Then, fuzzy logic combines their outputs to enhance the robustness of the prediction in uncertain conditions.
Table 9 presents the triangular membership functions employed in the fuzzy inference system to interpret the output values from the SVM and ANN classifiers.
In this architecture, a decision-level fusion approach is employed, where a fuzzy inference system combines the outputs generated by the SVM and ANN classifiers. This has some advantages on both the feature level and the data level of fusion. First, allowing each model to optimise independently, on disparate learning biases, leads to improved generalisation. On the other hand, decision-level fusion is more robust against noisy or incomplete input data, as the fusion is performed at the level of final predictions rather than raw or intermediate features. Third, this approach enables human-interpretable fuzzy rules, making the model highly transparent and interpretable—an essential feature if it is to be deployed in real-world smart city environments.
Interpretability analysis through fuzzy logic
A crucial contribution of our proposed model is its interpretability, which is explicitly provided by the fuzzy logic-based decision fusion. The fuzzy inference rules transparently address prediction uncertainty when the outputs of ANN and SVM diverge. For instance:
-
Rule Example 1: If ANN indicates congestion (1) and SVM indicates no congestion (0), the fuzzy logic rule outputs congestion only if the ANN’s confidence exceeds 0.5.
-
Rule Example 2: If both ANN and SVM outputs agree (either both congestion or both no congestion), fuzzy logic directly confirms the prediction, enhancing interpretability.
Table 10 presents examples of decisions made by the fuzzy logic inference system. It is clear how to use fuzzy logic transparently to address the conflict between the SVM and ANN’s outputs, thereby making the model more interpretable and practical.
To enhance health professional interpretability for the hybrid model, SHAP (SHapley Additive exPlanations) was incorporated to quantify and visualise feature impact on predictions. SHAP values were calculated on the output layer of the ANN and the decision boundary in SVM. According to the SHAP summary plot, time of day had the most significant impact, followed by incoming traffic flow and weather conditions.The least weighted features were hour portion (peak/off-peak).
We include the SHAP bar plot here as Fig. 5, displaying average absolute Shap values of all recordings. This visual understanding indicates that there are temporal and congestion-related factors that influence the predictive performance of our system, justifying why we have put more emphasis on encoding time-weather information in sec.

Mean absolute SHAP values for the top five features influencing traffic prediction. ‘Time of Day’ and ‘Traffic Volume’ are the most impactful features across both SVM and ANN models.
Furthermore, to verify the effect of fuzzy fusion process, we used ANFIS to calculate confidence scores for rules. These scores represent how frequently each fuzzy rule participates in the final output over given records. Figure 6 shows the bar chart of top five active fuzzy rules, in which Rule 2 (SVM = 1 and ANN = 1 → Congestion) as well as Rule3(ANN = 1,SVM = 0,and ANN conf > 0.6 ) dominate the decision set. This confidence profiling supports the real-world usability of our fusion logic, particularly in uncertain circumstances.

Confidence scores for the top five fuzzy inference rules as evaluated by ANFIS. Rules involving mutual agreement or strong individual model confidence are most frequently triggered.
Confidence scores for top five fuzzy inference rules computed by ANFIS are shown in Fig. 6. It demonstrates that rules with agreement in the two models or of one model’s confidence greater than a given threshold are most often triggered, which endorses robustness of the fusion logic.
We consider these two interpretability tools—SHAP for input-level transparency, and ANFIS for rule-level explanation—to be complementary in explaining the decision process of a system.
Statistical significance evaluation
To demonstrate the reliability and consistency of the model’s performance enhancements, we performed a statistical significance test using a paired t-test. The test aimed to evaluate the sensitivity of the hybrid model with fuzzy fusion compared to the SVM-only and ANN-only models, using 10 independent experimental runs.
Let and represent the mean performance metrics (F1-score and AUC) of the hybrid model and the baseline model (SVM or ANN), respectively. The null hypothesis \({H}_{^\circ }{:\mu }_{1}= {\mu }_{2}\) assumes no significant difference in performance: . The alternative hypothesis tests \({{H}_{1}:\mu }_{1}\ne {\mu }_{2}\) for a statistically significant difference.
Let µ1 and µ2 represent the mean performance metrics (F1-score and AUC) of the hybrid model and the baseline model (SVM or ANN), respectively. The null hypothesis assumes no significant difference in performance.
Table 11. Paired t-test results comparing the hybrid model with baseline models (SVM and ANN) for F1-score and AUC. Values include mean ± SD, mean differences with 95% confidence intervals, test statistics, effect sizes (Cohen’s d), and significance levels.
The outcomes of the paired t-tests are summarized in Table 11. The findings demonstrate that the proposed hybrid model consistently outperformed both SVM and ANN. Specifically, the hybrid model achieved a higher mean F1-score (99.2%) compared to SVM (98.8%), with a p-value of 0.0081. Similarly, the hybrid model obtained a higher mean AUC (0.96) compared to ANN (0.90), with a p-value of 0.0035. Since both values fall below the 0.01 threshold, these results confirm that the observed improvements are statistically significant and not attributable to random variation.
Paired design allows evaluating the differences between models on exactly the same folds, thus reducing variance due to different split of data. In comparison to the SVM model, the F1 score gain of the hybrid model (+ 0.4%) was stable on all folds, and compared to the ANN model, the hybrid model clearly obtained an improved AUC (+ 0.06). A p-value 0.5) indicates that these enhancement is not only statistically significant but also of practical significance. This further supports the hybrid fusion approach as a strong alternative to single model baselines.
ROC-AUC and PR curve analysis
The performance of the classifiers ANN and SVM is compared in Fig. 7 using ROC (Curve)and Precision-Recall curves. In Fig. 7a the ROC curves have demonstrated that both systems are performing well beyond random guessing and ANN has an AUC of 0.89 while SVM stands at 863 indicating strong discrimination power for these two models respectively. The PR curves, which are better for performance evaluation with class imbalance, are shown in Fig. 7b. The ANN´s PR-AUC is 0.81 and for the SVM it equals applicants or (both methods perform equally well). Recall points (0.2–0.8) are labeled to show changing of threshold. These findings indicate that the two models have good precision-recall trade-offs at different operating points and hence can be used in practical traffic prediction tasks.

(a) ROC curve: ANN and SVM achieve AUCs of 0.89 and 0.86, respectively. (b) PR curve: PR-AUCs of 0.81 (ANN) and 0.78 (SVM), with recall points annotated to highlight threshold behavio
We further verified the real-time viability by implementing the hybrid model on a Raspberry Pi 4 (4 GB RAM, quad-core ARM Cortex-A72), which could simulate edge-based smart city applications. The median inference latency was 12.4 ms end-to-end (preprocessing: 3.2 ms, SVM: 2.8 ms, ANN: 4.6 ms, fusion: 1.8 ms). With a load test at just 1,000 events/second, p95 never exceeded 20 ms, CPU utilisation stayed below 80% and there was no thermal throttling. Stable throughput and a power consumption of 5.3 W (avg) were confirmed through a 30 min soak test. The results were good when traffic dynamics (peak-hour vs. off-peak) and adverse weather-tagged inputs were considered, and the system’s robustness under changing conditions was proven. These results validate the robustness of the model for real-time deployment under resource-limited circumstances.
To further strengthen feature impact analysis, we also conducted a feature ablation study. We systematically removed key features one at a time—time of day, day of week, weather, sensor location, and traffic density—and measured the corresponding drop in F1 score. The results showed that time of day and traffic density were the most critical, producing the steepest decline in performance. These findings align with the SHAP results and validate the role of temporal and congestion-related features in driving predictive accuracy. Table 12 summarizes the results of the ablation study, highlighting the relative importance of each input variable.
Real-time benchmarking and scalability evaluation
According to the motivation and design objectives of our study (light-weightedness and low latency for real-time traffic in a smart city), we conducted empirical studies to compare the real-time latency, performance of inference and scalability properties of the proposed DFHITSSC (Decision-level Fuzzy Hybrid Intelligent Transport System Framework for Smart City). The aim was to assess the dependence of the framework on a resource starved environment like the edge.
To verify feasibility of deployment, the hybrid model was deployed on a Raspberry Pi 4 (4 GB RAM, Quad core ARM Cortex-A72). Table 14 shows the breakdown of preprocessing, SVM and ANN inference, fuzzy fusion time, and total end-to-end latency, as well as CPU Utilization, Memory Use, Power Consumption, and Thermal conditions during the stress test. The system obtained an average end-to-end latency of 12.4 ms for each traffic instance and stable CPU and memory consumption. Crucially, no thermal throttling could be observed even over extensive high-load testing, and overall the model is an effective performer on limited hardware.
Inference time benchmarking
Our benchmarking confirms that the proposed model is computationally lightweight and suitable for real-time deployment. Specifically, the average inference time of the complete DFHITSSC model was found to be 6.45 ms per instance, as shown in Table 13, which meets real-time requirements for traffic prediction systems.
Latency under load (Scalability test)
We simulated a batch of 1000 sensor inputs arriving within 1 s (i.e., ~ 1 K TPS) and observed the following:
-
Throughput: ~ 950 predictions/sec
-
Maximum Latency: 9.8 ms
-
System Load (%): CPU < 60%, RAM < 6 GB
Scalability features
Modular Design: Each layer (e.g., preprocessing, ANN/SVM inference, fuzzy fusion) is isolated for asynchronous or distributed processing. When deployed on a Raspberry Pi 4 (4 GB), the model retained a 12 ms per-inference time, suitable for edge computing scenarios.
Table 14 Edge device benchmarking of the hybrid model deployed on Raspberry Pi 4 (4 GB RAM). Results represent median values with standard deviation across 10,000 traffic instances under mixed traffic conditions.
For additional scalability and robustness test in real-world traffic we applied stress testing by simulating different traffic flows (from 100 to 1000 events per second). Figure Y 95% (p95) latencies are plotted as functions of traffic load. The results show that the proposed hybrid framework scales well and the latency is maintained below 20 ms even under the heaviest simulated loads, indicating it is adequate for real-time execution.
As Fig. 8 shows, the p95 latency stayed below 20 ms, even at the maximum 1000 events per second. This means that the DFHITSSC model can handle high-rate streams of events without performance degradation.

Scalability stress-test of framework under varying traffic load
Comparative evaluation with advanced baselines
To further confirm the experimental validity and efficiency of the proposed hybrid fuzzy decision fusion model, it was compared to classical baselines (SVM, ANN) and advanced deep learning models widely used for spatiotemporal traffic prediction, i.e., Graph Neural Networks (GNNs) and Transformer-based models. This comparison was fair, as it was performed under the exact same experimental conditions with same metrics, such as Accuracy, F1-score, AUC, Precision-Recall (PR) AUC, and average inference time per instance.
Quantitative performance comparison
The comparison results are summarized in Table 15. The classical country-based baselines (SVM and ANN) result in a reasonable discrimination of (94.2% (SVM) and 95.1% (ANN), but they are inferior to the hybrid approach. The intermediate hybrids (SVM + ANN) without fuzzy fusion enhances the result into 97.3% accuracy and 0.969 in F1-score proving the superiorities of ensembles’.
The proposed hybrid fuzzy fusion model further enhances the performance wit 98.6% classification accuracy, 0.982 F1-score and 0.987 AUC, compared to both GNN (97.9%, 0.974, 0.981) and Transformer (98.2%, 0.978, 0.984). Although GNNs and Transformers are both good at spatiotemporal learning, our decision-level fuzzy fusion approach is shown to maintain better performance, in particular in balancing predictive accuracy for all the metrics.
Precision-recall analysis
In addition to point-base metrics, we examined the performance reliability using Precision-Recall (PR) curves, as illustrated in Fig. 9. Our model shows consistently higher presicions at all recall levels, than T-GNNs and Transformers, and thus higher predictive consistency in decision threshold changes.

Comparative performance of the hybrid model with fuzzy fusion against baseline models (SVM and ANN
Although both state-of-the-art baselines yield good performance overall in PR terms, their curves are slightly lower than the proposed model, especially for higher recall values. This indicates that a proposed model reduces the likelihood of obtaining false positive results and at the same time manages to perform true positive results, which is crucial in safety–critical systems such as smart city traffic incidents management.
Figure 9 Precision-Recall curves between the proposed hybrid fuzzy decision fusion model and the recent baselines (Graph Neural Network, Transformer). The model performs consistently better across all levels of recall, confirming its better reliability in traffic incident prediction.
Computational efficiency
Inference efficiency is another very important for real-time deployment. As shown in Table 15, the proposed method needed on average about 6.4 ms per prediction, being around 40–55% faster than the GNNs (11.3 ms) and the Transformers (14.6 ms). Such computational edge can be especially useful in smart city edge deployments with resource-limited and low-latency requirements.
Ablation study on adaptive fusion
To investigate the effectiveness of adaptive confidence-weighted fusing the hybrid model, an ablation study was carried out on three hybrid model schemes: (i) the data combination model w/o fusion, (ii) the data combination model w/ simple equal- weighted fusion and (iii) the proposed hybrid model with confidence-weighted fuzzy fusion. All the models were trained in the same settings and tested in the same setup, while reporting all the evaluation metrics (Acc, F1-score, AUC, PR AUC) and inference time.
Table 16 presents the results. The non-fused hybrid also performed strongly, combining SVM and ANN predictions (Accuracy = 97.3%, F1-score = 0.969; AUC = 0.973), which demonstrates the utility of the fusion. A straightforward equal-weight fusion still led to a marginal increase over each result (97.8% Accuracy, 0.972 F1-score, 0.976 AUC), indicating that the fusion process alone contributes to a more robust classification. Nevertheless, the complete confidence-weighted fuzzy fusion outperformed in all measurements (accuracy 98.6%, F1 score 0.982, AUC 0.987), which shows the benefit of an adaptive weighting of the decisions at the decision-level and also the classifier-level.
Discussion and comparative analysis
These statistical tests provide further evidence that the hybrid fusion model performs significantly better than SVM and ANN on the same dataset portions. The stable low p-values (< 0.01) and effect sizes indicate that the gains were not spurious increases but were clearly based on the model’s robustness. This level of validation offers a robust evidence that our approach is reliable for a real smart city deployment.
The evaluation of the proposed hybrid traffic prediction model is carried out using standard classification metrics derived from the confusion matrix, including accuracy, precision, recall, and F1-score. These metrics are computed from binary predictions, where the model classifies whether congestion will occur (1) or not (0), and the results are validated against real-time IoT traffic sensor data. Such an evaluation framework is particularly important for urban traffic control, as it directly informs real-time decision-making for congestion management, resource allocation, and public safety.
The confusion matrix provides a clear view of the model’s predictive behavior. A true positive (TP) represents correct detection of congestion, while a true negative (TN) indicates accurate identification of normal traffic flow. On the other hand, false positives (FPs) are instances where the model predicts congestion but the traffic is actually normal—these can cause temporary inefficiencies but are less problematic than false negatives (FNs), where the model fails to detect actual congestion. In urban environments, FNs are especially critical, as they may lead to longer delays, increased driver frustration, and compromised road safety. For this reason, minimizing false negatives while keeping false positives at a manageable level is a priority in traffic management systems.
Accuracy, though commonly reported, may be misleading in datasets with imbalanced classes, where one condition dominates. Precision reflects how reliable the model is when predicting congestion, helping reduce unnecessary interventions such as rerouting or traffic light adjustments. Recall (or sensitivity) measures the model’s ability to correctly capture true congestion events, which is vital for proactive control measures. The F1-score balances these two aspects, making it an effective metric for real-time performance. In experiments, the hybrid model achieved an F1-score exceeding 0.89 across multiple test datasets, showing strong robustness and generalization. Importantly, this approach demonstrated superior performance compared to individual SVM and ANN models, largely due to the fuzzy logic-based fusion mechanism that combines their strengths while reducing weaknesses.
Statistical testing further confirms these improvements. A paired t-test on the F1-score showed a significant difference between the hybrid model (99.2%) and SVM (98.8%) with p = 0.0081. Similarly, the hybrid model’s AUC of 0.96 significantly outperformed ANN’s 0.90 (p = 0.0035). Both results fall below the 0.01 threshold, indicating that the improvements are highly unlikely to be due to chance. This statistical evidence reinforces the robustness and reliability of the proposed model, aligning with recent studies that emphasize rigorous statistical validation for performance assessment in traffic prediction research [cite relevant works].
Beyond accuracy, the novelty of our contribution lies in customizing fuzzy logic for real-time urban traffic applications. First, triangular membership functions tailored to traffic-specific variables allow the model to better capture subtle variations in traffic flow compared to generic fuzzy designs. This enhances both interpretability and responsiveness. Second, the integration of confidence-based fusion rules adds an innovative layer by weighting classifier outputs according to their reliability, leading to more consistent predictions in uncertain or incomplete data scenarios. This feature is especially useful in live traffic incident prediction, where sensor data may arrive late or contain noise.
The findings confirm that our hybrid model delivers robust and accurate predictions within the context of Lahore’s traffic environment. However, we recognize that the model’s current validation is limited to one city with its own infrastructure, road conditions, and data availability. Instead of making generalized claims about all smart cities, we position our contribution as most relevant to cities with comparable infrastructure and resource constraints. This realistic framing ensures that the strengths of our model—computational efficiency, scalability to resource-limited devices, and resilience to noisy data—are presented in a grounded manner. Future work should expand the dataset to different metropolitan areas to evaluate adaptability across diverse traffic systems.
To highlight the contribution of confidence-weighted logic, we conducted an ablation study. Without this component, the model achieved a mean F1-score of 0.941 and an AUC of 0.902. With confidence-weighted logic, performance improved to a mean F1-score of 0.962 and AUC of 0.936, along with an increase in PR Curve Area from 0.895 to 0.928. These results clearly show that confidence-weighted fusion significantly enhances predictive strength. Building on this, future integration of adaptive techniques such as Adaptive Neuro-Fuzzy Inference Systems (ANFIS) or reinforcement learning could further refine decision-making under dynamic traffic conditions.
Overall, the hybrid model offers a practical, adaptable, and interpretable solution for deployment in smart city scenarios, particularly in developing countries where computational resources are often limited. Its predictions can support traffic control centers in adjusting signal timings, assist public transport authorities in fleet management, and help emergency services reroute vehicles more effectively. By improving mobility, reducing emissions, and enhancing safety, the proposed system contributes meaningfully to sustainable urban transportation.
The evaluation of the proposed hybrid traffic prediction model is carried out using standard classification metrics derived from the confusion matrix, including accuracy, precision, recall, and F1-score. These metrics are computed from binary predictions, where the model classifies whether congestion will occur (1) or not (0), and the results are validated against real-time IoT traffic sensor data. Such an evaluation framework is particularly important for urban traffic control, as it directly informs real-time decision-making for congestion management, resource allocation, and public safety.
The confusion matrix provides a clear view of the model’s predictive behavior. A true positive (TP) represents correct detection of congestion, while a true negative (TN) indicates accurate identification of normal traffic flow. On the other hand, false positives (FPs) are instances where the model predicts congestion but the traffic is actually normal—these can cause temporary inefficiencies but are less problematic than false negatives (FNs), where the model fails to detect actual congestion. In urban environments, FNs are especially critical, as they may lead to longer delays, increased driver frustration, and compromised road safety. For this reason, minimizing false negatives while keeping false positives at a manageable level is a priority in traffic management systems.
Accuracy, though commonly reported, may be misleading in datasets with imbalanced classes, where one condition dominates. Precision reflects how reliable the model is when predicting congestion, helping reduce unnecessary interventions such as rerouting or traffic light adjustments. Recall (or sensitivity) measures the model’s ability to correctly capture true congestion events, which is vital for proactive control measures. The F1-score balances these two aspects, making it an effective metric for real-time performance. In experiments, the hybrid model achieved an F1-score exceeding 0.89 across multiple test datasets, showing strong robustness and generalization. Importantly, this approach demonstrated superior performance compared to individual SVM and ANN models, largely due to the fuzzy logic-based fusion mechanism that combines their strengths while reducing weaknesses.
One important difference between the proposed approach and these previous ones is the application of the fuzzy fusion mechanism by remnants of specific fields. Contrasting the typical fuzzy-logic schemes our construction relies on triangular membership functions that are defined in values associated to traffic densities boundaries, seasonal peak hour variations and weather conditions, incorporating expertise into the decision process. Furthermore, the confidence-weighted rules allow predictions to be controlled by the classifier with more certainty and an uncertainty-control strategy that uses short-term historical data to keep stable under noisy settings. These advanced techniques allow the proposed system to be not only different with the former fuzzy fusion solutions but also more understandable, robust, and applicable in real-time scenario for smart city traffic applications.
Beyond accuracy, the novelty of our contribution lies in customizing fuzzy logic for real-time urban traffic applications. First, triangular membership functions tailored to traffic-specific variables allow the model to better capture subtle variations in traffic flow compared to generic fuzzy designs. This enhances both interpretability and responsiveness. Second, the integration of confidence-based fusion rules adds an innovative layer by weighting classifier outputs according to their reliability, leading to more consistent predictions in uncertain or incomplete data scenarios. This feature is especially useful in live traffic incident prediction, where sensor data may arrive late or contain noise.
The findings confirm that our hybrid model delivers robust and accurate predictions within the context of Lahore’s traffic environment. However, we recognize that the model’s current validation is limited to one city with its own infrastructure, road conditions, and data availability. Instead of making generalized claims about all smart cities, we position our contribution as most relevant to cities with comparable infrastructure and resource constraints. This realistic framing ensures that the strengths of our model—computational efficiency, scalability to resource-limited devices, and resilience to noisy data—are presented in a grounded manner. Future work should expand the dataset to different metropolitan areas to evaluate adaptability across diverse traffic systems.
To highlight the contribution of confidence-weighted logic, we conducted an ablation study. Without this component, the model achieved a mean F1-score of 0.941 and an AUC of 0.902. With confidence-weighted logic, performance improved to a mean F1-score of 0.962 and AUC of 0.936, along with an increase in PR Curve Area from 0.895 to 0.928. These results clearly show that confidence-weighted fusion significantly enhances predictive strength. Building on this, future integration of adaptive techniques such as Adaptive Neuro-Fuzzy Inference Systems (ANFIS) or reinforcement learning could further refine decision-making under dynamic traffic conditions.
The results of ablation (Table 16) further demonstrate the importance of adaptive logic based decision fusion. The confidence-weighted fusion approach performed better than non-fusion or equal-weight fusion in all tasks, demonstrating the importance of adaptation for improved prediction confidence. This result supports the extension of adaptability through advanced approaches, such as ANFIS or RL.
Overall, the hybrid model offers a practical, adaptable, and interpretable solution for deployment in smart city scenarios, particularly in developing countries where computational resources are often limited. Its predictions can support traffic control centers in adjusting signal timings, assist public transport authorities in fleet management, and help emergency services reroute vehicles more effectively. By improving mobility, reducing emissions, and enhancing safety, the proposed system contributes meaningfully to sustainable urban transportation. In Table 17, a comparative analysis of the Proposed Model with Modern Techniques is presented below.
Table 18 presents a comparative performance analysis of the proposed hybrid scheme in comparison with the standalone SVM and ANN approaches.
Limitations of this study
Both advanced techniques, such as NSGA-II and MOEA/D, are at the top of the multi-objective optimisation leaderboard. In contrast, ensemble methods like Random Forest and Gradient Boosting are recognised for their high predictive power; however, they were not directly compared to each other within the scope of this work for two reasons. To begin with, these models are generally not interpretable, and urban planners require a full understanding and trust in an automated system’s decisions. Second, evolutionary and ensemble-based approaches have higher computational overhead, which diverges from the real-time and infrastructure-limited context of smart cities in developing regions. In future work, these techniques will be combined for comparative analysis and to explore hybridisation possibilities. One of the major limitations of this study is its relatively small dataset size (1243 instances), which may limit the generalizability of the results. This limitation mirrors real-world conditions in many developing urban areas that lack dedicated IoT traffic sensors. Still, carefully using lightweight algorithms, decision-level fusion, and validation strategies offers reasonable confidence in the model’s performance. In future work, we will explore the system’s scalability for larger datasets and evaluate it across multiple cities. One of the limitations of the current model is its limited ability to handle unexpected traffic anomalies, such as accidents, emergency roadblocks, or temporary road closures. The dataset did not have labelled instances of the anomalies, so the model primarily learns from historical and repeated traffic. This can be a limitation when predicting sudden, non-routine events. We hope to complement our approach with real-time mechanisms (e.g., incident reports, social media feeds, or anomaly detection algorithms (e.g., statistical thresholds, autoencoders) ) to allow dynamic adaptation to such situations in future work. Such improvements would enhance the system’s resilience and robustness for deployment in real-world, unpredictable traffic scenarios.
Although our results are encouraging, several limitations must be acknowledged. First, the dataset used in this study was sourced exclusively from Lahore, which may restrict the extent to which findings can be generalized to cities with markedly different transportation infrastructures or traffic patterns. Second, while cross-validation and stratified sampling strengthen internal robustness, they cannot substitute for external validation on diverse datasets. As such, additional experiments across multiple cities would be necessary before making broader claims of universality. We recommend that future research focus on comparative validation in urban areas that differ in population density, traffic sensor coverage, and infrastructural maturity to establish the model’s adaptability fully.
Conclusion
In this paper, a hybrid fuzzy decision-fusion model based on Support Vector Machines (SVM) and Artificial Neural Networks (ANN) was proposed for traffic flow forecasting. The experimental validation on a real-life dataset from the Lahore area showed high performance (accuracy 98.6%, sensitivity 98.8%, specificity 98.2%) with respect to the other methods. Notwithstanding these quantitative gains, the framework also makes a practical contribution to the smart city planning community, which needs interpretable, real-time, and lightweight tools to alleviate congestion and allocate resources more optimally.
However, the applicability of these results should be understood within their contextual scope: the model is most immediately relevant to mid-sized cities with infrastructure and resource constraints similar to Lahore. Although the method appears to be systematically applied, further testing on a more diverse, city-wise dataset is needed before making universal generalisation claims.
Data availability
The datasets used and/or analyzed during the current study are available from the corresponding author on request.
References
Khan, S. et al. Towards transparent traffic solutions: Reinforcement learning and explainable AI for traffic congestio. Int. J. Adv. Comput. Sci. Appl. (IJACSA) https://doi.org/10.14569/IJACSA.2025.0160150 (2025).
Aid, A., Khan, M. A., Abbas, S., Ahmad, G. & Fatimat, A. Modelling a smart road traffic congestion control system using machine learning techniques. Neural Netw. World 29(2), 99–110. https://doi.org/10.14311/NNW.2019.29.008 (2019).
Boukerche, A. & Wang, J. A performance modeling and analysis of a novel vehicular traffic flow prediction system using a hybrid machine learning-based model. Ad Hoc Netw. https://doi.org/10.1016/j.adhoc.2020.102224 (2020).
Zhou, G. et al. A multi-scale enhanced feature fusion model for aircraft detection from SAR images. Int. J. Digit. Earth 18(1), 2507842. https://doi.org/10.1080/17538947.2025.2507842 (2025).
Zuo, C., Zhang, X., Zhao, G. & Yan, L. PCR: a parallel convolution residual network for traffic flow prediction. IEEE Trans. Emerg. Top. Comput. Intell. 9(4), 3072–3083. https://doi.org/10.1109/TETCI.2025.3525656 (2025).
Ding, H., Li, X., Cai, Y., Lorenzo, B. & Fang, Y. Intelligent data transportation in smart cities: a spectrum-aware approach. IEEE/ACM Trans. Netw. 26(6), 2598–2611. https://doi.org/10.1109/TNET.2018.2871667 (2018).
Elfar, A., Talebpour, A. & Mahmassani, H. S. Machine learning approach to short-term traffic congestion prediction in a connected environment. Transp. Res. Rec. 2672(45), 185–195. https://doi.org/10.1177/0361198118795010 (2018).
Ding, C. et al. The intelligent traffic flow control system based on 6G and optimized genetic algorithm. IEEE Trans. Intell. Transp. Syst. https://doi.org/10.1109/TITS.2024.3467269 (2024).
Han, T. et al. 5G converged cell-less communications in smart cities. IEEE Commun. Mag. 55(3), 44–50. https://doi.org/10.1109/MCOM.2017.1600256CM (2017).
He, Z., Chow, C. Y., & Zhang, J. D. STCNN: A spatio-temporal convolutional neural network for long-term traffic prediction. In: 2019 IEEE International Conference on Mobile Data Management (MDM) (pp. 226–233). IEEE. https://doi.org/10.1109/MDM.2019.00-53 (2019).
Chen, J., Pan, S., Peng, W. & Xu, W. Bilinear spatiotemporal fusion network: An efficient approach for traffic flow prediction. Neural Netw. 187, 107382. https://doi.org/10.1016/j.neunet.2025.107382 (2025).
Kia, M. B. et al. An artificial neural network model for flood simulation using GIS: Johor River Basin, Malaysia. Environ. Earth Sci. 67(1), 251–264. https://doi.org/10.1007/s12665-011-1504-z (2012).
Li, C. & Xu, P. Application on traffic flow prediction of machine learning in intelligent transportation. Neural Comput. Appl. 33(2), 613–624. https://doi.org/10.1007/s00521-020-05002-6 (2021).
Li, L., Qu, X., Zhang, J., Wang, Y. & Ran, B. Traffic speed prediction for an intelligent transportation system based on a deep feature fusion model. J. Intell. Transp. Syst. Technol. Plan. Oper. 23(6), 605–616. https://doi.org/10.1080/15472450.2019.1583965 (2019).
Pham, B. T. et al. Development of artificial neural networks for the prediction of the compression coefficient of soft soil. Lect. Notes Civ. Eng. 54, 1167–1172. https://doi.org/10.1007/978-981-15-0802-8_187 (2020).
Pisner, D. A., Shumake, J., Beevers, C. G. & Schnyer, D. M. The superior longitudinal fasciculus and its functional triple-network mechanisms in brooding. NeuroImage Clin. 24, 101935. https://doi.org/10.1016/j.nicl.2019.101935 (2019).
Zhang, S. Feature-aware task offloading and scheduling mechanism in vehicle edge computing environment. Int. J. Veh. Inf. Commun. Syst. 9(4), 415–433. https://doi.org/10.1504/IJVICS.2024.142101 (2024).
Long, W. et al. Unified spatial-temporal neighbor attention network for dynamic traffic prediction. IEEE Trans. Veh. Technol. 72(2), 1515–1529. https://doi.org/10.1109/TVT.2022.3209242 (2023).
Liang, J. et al. Interaction-aware trajectory prediction for safe motion planning in autonomous driving: A transformer-transfer learning approach. IEEE Trans. Intell. Transp. Syst. https://doi.org/10.1109/TITS.2025.3588228 (2025).
Shokri, D., Larouche, C. & Homayouni, S. A comparative analysis of multi-label deep learning classifiers for realtime vehicle detection to support intelligent transportation systems. Smart Cities 6(5), 2982–3004. https://doi.org/10.3390/smartcities6050134 (2023).
Tamimi, S., & Zahoor, M. Link delay estimation using fuzzy logic. In: 2010, the 2nd International Conference on Computer and Automation Engineering (ICCAE) (Vol. 2, pp. 406–411). IEEE. https://doi.org/10.1109/ICCAE.2010.5451575 (2010)
Rong, Y. et al. Du-bus: A realtime bus waiting time estimation system based on multi-source data. IEEE Trans. Intell. Transp. Syst. 23(12), 24524–24539. https://doi.org/10.1109/TITS.2022.3210170 (2022).
Wang, Q., Chen, J., Song, Y., Li, X. & Xu, W. Fusing visual quantified features for heterogeneous traffic flow prediction. Promet Traffic Transp. 36(6), 1068–1077. https://doi.org/10.7307/ptt.v36i6.667 (2024).
Chen, J., Ye, H., Ying, Z., Sun, Y. & Xu, W. Dynamic trend fusion module for traffic flow prediction. Appl. Soft Comput. 174, 112979. https://doi.org/10.1016/j.asoc.2025.112979 (2025).
Sun, G., Zhang, Y., Yu, H., Du, X. & Guizani, M. Intersection fog-based distributed routing for V2V communication in urban vehicular ad hoc networks. IEEE Trans. Intell. Transp. Syst. 21(6), 2409–2426. https://doi.org/10.1109/TITS.2019.2918255 (2020).
Owais, M., Moussa, G. & Hussain, K. Robust deep learning architecture for traffic flow estimation from a subset of link sensors. J. Transp. Eng. 146, 1–13. https://doi.org/10.1061/JTEPBS.0000290 (2019).
Owais, M. Deep learning for integrated origin-destination estimation and traffic sensor location problems. IEEE Trans. Intell. Transp. Syst. 25, 1–13. https://doi.org/10.1109/TITS.2023.3344533 (2024).
Afandizadeh, S., Abdolahi, S. & Mirzahossein, H. Deep learning algorithms for traffic forecasting: A comprehensive review and comparison with classical ones. J. Adv. Transp. https://doi.org/10.1155/2024/9981657 (2024).
Varghese, V., Chikaraishi, M. & Urata, J. Deep learning in transport studies: A meta-analysis on prediction accuracy. J. Big Data Anal. Transp. 2, 199–220. https://doi.org/10.1007/s42421-020-00030-z (2020).
Author information
Authors and Affiliations
Contributions
B.A. and T.A. wrote the main manuscript text and developed the conceptual framework. Q.A. and S.S.A. contributed to the methodology, data analysis, and validation. T.A. and T.A. assisted in the implementation of the hybrid approach and optimization techniques. N.T. prepared all figures and contributed to the literature review. N.A. revised the manuscript and contributed to the improvement of its technical content. A.M.I. conducted the final review, formatting, and manuscript refinement. All authors reviewed, edited, and approved the final manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Abbas, B., Alyas, T., Abbas, Q. et al. A hybrid support vector machine and neural network model with fuzzy logic fusion for smart city traffic prediction. Sci Rep 15, 34758 (2025). https://doi.org/10.1038/s41598-025-18472-2
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-18472-2
