
Abstract
Dual-mode sensing represents a highly promising strategy for resonant sensors to achieve in-situ compensation and high-accuracy parameter detection. Micromechanical resonators typically exhibit multiple vibration modes, each with distinct sensitivities to external parameters. By employing different modes for sensing and simultaneously reading out their respective frequencies, cross-sensitivity in multi-parameter detection can be effectively mitigated while fully exploiting the advantages of frequency output in resonant sensors. To address the challenges of inter-modal interaction and vibration signal coupling in dual-mode vibration, this paper investigates dispersive coupling in a double-clamped microbeam, and analyzes the mutual influence between the amplitudes and frequencies of the modes under dual-mode excitation, as well as the implications for sensing applications. Based on constant-amplitude automatic gain control (AGC) and dual differential detection, a dual-mode vibration signal decoupling and stable closed-loop control approach is proposed, achieving a simple and efficient decoupled detection of the dual-mode vibration signals and enabling real-time, synchronous readout of the dual-mode frequencies. The effectiveness of the proposed method was experimentally validated using a resonant pressure sensor. Test results of the pressure sensor demonstrate excellent in-situ temperature compensation effects, with a fitting accuracy of ±0.009% full scale (FS), a maximum repeatability error of 0.0042% FS, a maximum pressure hysteresis error of 0.0068% FS, and an overall pressure accuracy of ±0.012% FS. Furthermore, this dual-mode sensing scheme shows significant potential for multi-parameter measurements and contributes to the advancement of resonant sensors toward miniaturization and intelligence.

Similar content being viewed by others
Introduction
Micromechanical resonators, as micro-structures based on the principle of resonance for energy transfer and conversion, have become a highly focused core component in the field of modern micro-electro-mechanical systems (MEMS). With the rapid advancement of microelectronics technology, micromechanical resonators demonstrate remarkable characteristics such as high sensitivity, high quality factor, and high stability, showcasing significant application potential in areas including timekeeping1, sensors2, and communication systems3. As a key application of micromechanical resonators, resonant MEMS sensors detect changes in external physical quantities, such as pressure4,5,6, force7,8 acceleration9,10, angular velocity11, mass12, etc., by monitoring shifts in resonant frequency or amplitude9,13,14. Their core advantages include high accuracy, strong resistance to interference, low power consumption, small size, and a compact structure. These features make them easy to integrate into miniaturized devices and suitable for a wide range of applications. Usually, the sensor system adopts a closed-loop configuration where the output automatically tracks the input, ensuring stable measurement results15.
However, the performance of resonant MEMS sensors is inherently sensitive to temperature variations, which can introduce significant measurement errors. Temperature fluctuations induce changes in material properties and mechanical deformation of the structure, thereby degrading the stability of the resonant frequency. For instance, as the ambient temperature rises, thermal expansion of the materials causes deformation of the resonator, altering its natural frequency and resulting in drifts of the output signal. Moreover, mismatches in the thermal expansion coefficients between the packaging material and the sensing element can generate thermal stresses, further compromising accuracy of the sensor16,17.
To address these issues, various compensation methods have been proposed in existing technologies. Among them, multi-resonator integration is an effective method5,16,17. By integrating multiple resonators in a single sensor and exploiting their distinct responses to temperature, a differential structure can be designed to cancel out temperature-induced frequency drift, thereby decoupling the measured quantity from temperature. However, this method increases the device size and requires a complex design process to achieve sensitivity matching between the resonators. Another method is multi-sensor integration6,18. By integrating a temperature sensor with a resonant sensor on the same chip, temperature changes can be monitored in real time. Through a feedback system or algorithmic processing, the temperature-induced frequency drift can then be compensated, ensuring high accuracy over a wide temperature range. However, this method also increases the device size and power consumption. Furthermore, due to thermal gradients between the devices, thermal hysteresis may occur. Besides, some researchers have proposed an in-situ temperature compensation method for resonant sensors by utilizing the amplitude of the resonator19. The resonator is driven with a constant excitation. Because the vibration amplitude varies with temperature, in-situ temperature compensation can be achieved by monitoring the amplitude. This method is simple and easy to implement. However, amplitude detection and transmission are susceptible to external interference, which can compromise sensor stability. In addition, temperature interference can be directly suppressed through active temperature control20,21. By integrating microheaters or employing external temperature control systems, the resonator’s operating temperature can be maintained constant. However, this method significantly increases system complexity and power consumption, limiting its applicability.
Typically, micromechanical resonators exhibit multiple vibrational modes, with each modal frequency exhibiting distinct sensitivities to variations in environmental parameters. By leveraging the multimode characteristics of a single resonator to simultaneously sense and output two modal frequencies, the measurand can be effectively decoupled from temperature fluctuations. This strategy enables in-situ temperature compensation and high-accuracy measurement while fully capitalizing on the inherent advantages of frequency output of resonant sensors, including high precision, excellent stability, and efficient transmission capabilities22. Based on a single resonator, it also promises to reduce device size, simplify system complexity, ensure stability, and enhance overall performance, thereby advancing the miniaturization and intelligent integration of resonant sensors.
Figure 1a and b illustrate the principle of dual-mode sensing of a micromechanical resonator. X1 and X2 represent two different physical quantities to be measured, and their changes result in frequency shifts of the resonator’s two modes. Since the distinct sensitivities of the two modes to external quantities, accurate measurement of X1 (or X2) can be achieved by solving the relationship among X1, X2 and the two frequencies.

a Frequency responses of the resonator’s first two modes versus external quantity to be measured. b The principle of dual-mode sensing. c Double-clamped beam and its first two modal shapes
In fact, as early as the 1970s, researchers had proposed dual-mode operation of quartz crystal oscillators for temperature or stress compensation23. In principle, a single crystal can be simultaneously excited in multiple vibrational modes without mutual interference, making it straightforward to implement dual-mode closed-loop control and decouple vibration signals. This capability facilitated its rapid adoption in temperature, pressure, and force measurements24. Later, researchers extended this approach to AlN devices25, silicon bulk acoustic devices26,27, and PZT sensors28.
In resonant sensors based on microbeams or microplates, practical research on dual-mode sensing remains limited due to challenges such as inter-modal interference (dispersive coupling29) caused by vibrational tension30,31 or electrostatic field32, and signal coupling between the modal vibrations. In 1996, a mode switching method was proposed33. By changing the circuit parameters, different modes of the resonator were sequentially excited and monitored, achieving temperature compensation for resonant pressure sensors. The primary drawback of this method is that the dual-mode frequencies are read out sequentially, resulting in long response times and precluding real-time measurement. Additionally, studies have investigated microbeam-based resonant sensors for measuring stress34 and vapor35 by using dual-mode sensing. However, these investigations relied on open-loop measurement and failed to achieve closed-loop detection. M.L. Roukes36 and Guillaume Gourlat37,38 attempted dual-mode mass sensing in microbeam resonant sensors, achieving closed-loop control and signal decoupling through lock-in amplifiers and complex circuit designs. In recent years, a multimode sensing scheme based on blue-sideband excitation was proposed39,40, enabling real-time readout of dual-mode frequencies and multi-parameter decoupling in microbeam-based resonant sensors. However, this approach requires complex circuitry, and its performance remains insufficiently characterized. Furthermore, a dual-mode resonant MEMS accelerometer10 was proposed in 2024 that utilizes dual-mode frequencies for temperature compensation in acceleration measurements. Leveraging the powerful computational capabilities of an FPGA, they achieved decoupling and closed-loop control of the two modes. Nevertheless, this method exhibits a narrow closed-loop bandwidth, and the effectiveness of the decoupling requires further improvement.
In summary, dual-mode sensing represents a promising strategy, and research in this area has indeed increased in recent years. However, there has been limited study on evaluating the mutual influence between the two vibration modes and its implications for sensing applications. Furthermore, current methods for signal decoupling and closed-loop control are complex. These issues hinder the development of dual-mode resonant sensors and necessitate further investigation.
To address these issues, this paper investigates the dispersive coupling in a double-clamped microbeam, and analyzes the mutual influence between the amplitudes and frequencies of the two modes under dual-mode vibration conditions, as well as its implications for sensing applications. Based on theoretical analysis, a novel approach for decoupling and closed-loop control of the dual-mode vibration signals is proposed, which utilizes constant-amplitude-based automatic gain control (AGC) and dual differential detection. Experimental validation using a pressure sensor demonstrates that this approach achieves effective in-situ temperature compensation.
Method
Theoretical analysis
As illustrated in Fig. 1c, the double-clamped beam can be driven simultaneously by two alternating current (AC) signals whose frequencies are near the beam’s first and second natural frequencies. Under these conditions, the beam’s equations of motion are given by:
Where mi, ci, ki, ui(t) are the effective mass, damping, linear stiffness, and displacement of the i-th mode (i = 1, 2), Ω1, Ω2 are the driving frequencies, Fac1, Fac2, Fac3, Fac4 are the effective driving forces for the first and second modes, kN1, kN2, kN3, kN4 are the effective nonlinear stiffness of the first mode, kN5, kN6, kN7, kN8 are the effective nonlinear stiffness of the second mode.
In order to facilitate the solution of Eq. (1), a dimensionless small parameter ε is taken, and the above parameters are replaced as follows:
Where ωi is the frequency of the i-th mode.
Thus, Eq. (1) can be written as:
The multi-scale method41 is used to approximate Eq. (3). The relationship among the modal frequency detuning δi, the driving forces and the modal amplitudes in steady state can be obtained as follows:
Where \({\varOmega }_{i}={\omega }_{i}+{\varepsilon }^{2}{\delta }_{i}\), and ai is the effective amplitude of the i-th mode.
The first term in Eq. (4) is the approximate amplitude-frequency characteristic of a single mode in the linear region, the second term is the influence term of nonlinearity on the amplitude-frequency characteristics, and the third term is the dispersive coupling term.
Considering amplitudes of the two modes at their maximum value, Eq. (4) can be simplified as:
Numerical simulations have been performed to solve the above equations and analyze the system behavior. For single-mode vibration, the resonator’s amplitude-frequency responses are depicted in Fig. 2a and b. These results show that the resonant amplitude increases with the driving force, while nonlinear phenomena become increasingly prominent. Considering amplitude of the second mode at its maximum value, \({a}_{2}={F}_{4}/({\omega }_{2}{\mu }_{2})\), the amplitude-frequency characteristic of the first mode, as a function of a2, is shown in Fig. 2c. With the first mode’s driving force held constant, increasing a2 induces a frequency shift of the first mode. As predicted by Eq. (5), this detuning exhibits a quadratic dependence on a2. A corresponding effect for the second mode is illustrated in Fig. 2d.

a Amplitude-frequency characteristics of the first mode with the increase of F1. b Amplitude-frequency characteristics of the second mode with the increase of F4. c Responses of the first mode with the increase of a2. d Responses of the second mode with the increase of a1
According to the numerical results, both nonlinearity and dispersive coupling can induce modal frequency shifts on the order of several hertz. For resonant sensors requiring an accuracy of about 0.01% full scale (FS), such shifts would introduce significant measurement errors. Therefore, in practical applications, the resonator is typically operated within an approximately linear state to eliminate the adverse effects of nonlinearity. As for dispersive coupling, it is essential to control it, ensuring that the coupling strength remains weak to minimize coupling-induced frequency shifts. Alternatively, maintaining a constant dispersive coupling strength, by keeping all modes’ vibration amplitudes constant, is another viable approach.
When the nonlinearity is ignored, and the strength of dispersive coupling is controlled under stable and repeatable conditions, the resonant frequencies of the two modes can be expressed as:
For a double-clamped beam with axial stresses, frequencies of the first two modes are42:
Where ω10 and ω20 are intrinsic frequencies without axial stresses, σ is the axial stress, σc1 and σc2 are the critical Euler stresses, L is the length of the beam, E is the Young’s modulus, I is the moment of inertia, ρ is the density, and A is the area of the beam’s cross section.
Then, Eq. (6) can be expressed as:
Usually, σ is small relative to σc, and Eq. (8) can be approximated as:
Thus, the sensitivities of the resonant frequencies to the axial stress can be written as:
It is found that the second term in Eq. (10) is much smaller than the first term in the numerical calculation, so the resonant frequencies are almost linear with the change of axial stress.
When the ambient temperature changes, only the influence of Young’s modulus with temperature change is considered, and Eq. (6) can be written as:
Where \({k}_{n3},{k}_{n7}\propto E\).
The sensitivities of the resonant frequencies to temperature can be approximated as:
For the beam made of monocrystalline silicon, the temperature coefficient of Young’s modulus43 is about -60ppm/°C, so the resonant frequencies are also approximately linear with temperature under this simplified condition.
Considering the influence of both stress and temperature, Eq. (6) can be rewritten as:
Based on Eqs. (10) and (12), under such sensitivity relationships of resonant frequencies to stress or temperature, accurate stress or temperature measurement can be achieved by solving Eq. (13) inversely, when Ω1 and Ω2 are obtained.
Signal detection and closed-loop control
The strategy of maintaining a constant dispersive coupling strength by ensuring constant-amplitude vibrations, aligns perfectly with the closed-loop approach based on automatic gain control44 (AGC). Through closed-loop feedback implemented via AGC, the vibration amplitude of a specific mode of the resonator can be continuously maintained at a fixed setpoint, thereby stabilizing dispersive coupling. When external parameters change, the strength of dispersive coupling remains stable and repeatable, preventing the frequency shifts induced by coupling from degrading sensor performance.
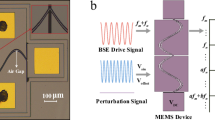
Additionally, when two modes of the resonator are excited simultaneously, the vibration signal detected by a single sensing electrode contains superimposed contributions from the two modal vibrations and their higher-order harmonics, necessitating decoupled detection of the vibration signals. Taking advantage of the symmetric and antisymmetric characteristics of the first and second mode shapes of the double-clamped microbeam, a six-electrode actuation and sensing configuration is designed as shown in Fig. 3a. Among these, four electrodes are used for sensing, while the remaining two electrodes can be employed for actuation. More specifically, the two central electrodes form a pair of differential sensing electrodes E1, E2, and two end electrodes on one side of the beam form another pair of differential sensing electrodes E3, E4. When the resonator vibrates in the first mode, differential detection via electrodes E1 and E2 can amplify the first modal vibration signal and reject the second modal signal as common-mode noise, improving the signal-to-noise ratio (SNR). Similarly, when the resonator vibrates in the second mode, differential detection via electrodes E3 and E4 amplifies the second modal vibration signal while rejecting the first modal vibration signal. This approach effectively decouples the superimposed dual-mode vibration signals, ensuring each detection channel receives a pure and stable signal.

a Diagram of dual-mode closed-loop control based on AGC and dual differential detection. b Schematic of the single-channel closed-loop circuit
Figure 3b presents the schematic of the single-channel closed-loop circuit. The vibration signal of the target mode (first or second) undergoes I-V conversion, differential amplification, and phase adjustment before being split into two paths. One path is filtered and converted to a square wave for frequency readout. The other path is attenuated and fed back to the resonator’s drive electrode to sustain oscillation. The AGC module, the key component for amplitude stabilization, consists primarily of a comparator and a junction field-effect transistor (JFET). The resonator’s output signal is compared with a reference voltage. The comparator’s output is then rectified and applied to the JFET gate to modulate its channel current. With the JFET operating in the ohmic region, its equivalent resistance is controlled by the gate voltage, which adjusts the voltage-divider attenuation within the loop, ensuring the loop gain remains near unity at steady state and stabilizing the modal vibration at a prescribed amplitude. The circuit’s gain range can be tuned by adjusting either the pre-stage amplification or the series resistor in the JFET-based voltage divider.
Based on AGC and dual differential detection, the designed dual-mode closed-loop control system enables the simultaneous readout of the first and second modal frequencies, achieving a dual-mode sensing scheme featured with controlled dispersive coupling and decoupled vibration signal detection.
Results and discussion
Design and fabrication of MEMS pressure sensor
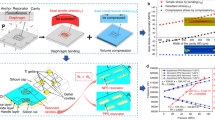
To validate the effectiveness of the proposed dual-mode sensing scheme, a resonant MEMS pressure sensor is utilized as the testbed. The designed MEMS pressure sensor is illustrated in Fig. 4a. It features a pressure-sensitive diaphragm with a double-clamped beam anchored at its center, and three pairs of electrodes are distributed on either side of the beam. When external pressure is applied, the sensitive diaphragm deforms, approximately linearly altering the axial stress and changing the frequencies of the double-clamped beam, as shown in Fig. 4b.

a Designed MEMS pressure sensor. b Schematic diagram of applying pressure to the assembled pressure sensor. c Image of fabricated sensors
The sensor was fabricated using bulk silicon processes. The main fabrication processes includes the etching of the silicon-on-insulator (SOI) wafer and the silicon cap, HF treatment for releasing the resonator, vacuum eutectic bonding of the cap and the SOI wafer, deposition of metal electrodes, and wire bonding. The fabricated sensor is shown in Fig. 4c.
Open-loop tests
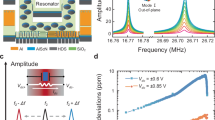
Employing dual differential detection, the open-loop characteristics of the sensor are presented in Fig. 5a, b. Under atmospheric pressure, the first modal frequency of the resonant beam is approximately 64,635.66 Hz, with quality factor of about 35,000. The second modal frequency is approximately 167,422.85 Hz, with quality factor of about 26,000.

a Test result of the amplitude-frequency response of the sensor’s first mode. b Test result of the amplitude-frequency response of the second mode. c Variation of the first mode’s amplitude-frequency characteristic with the second mode’s amplitude and relationship between the first modal frequency shifts Δf1 and the amplitude of the second mode a2. d Variation of the second mode’s amplitude-frequency characteristic with the first mode’s amplitude and relationship between Δf2 and a1
Figure 5c presents experimental results demonstrating the influence of the second mode’s amplitude on the first mode’s frequency response. An AC drive signal at approximately 167,422.8 Hz was applied to the resonator, while systematically varying its amplitude to control the second mode vibration level. Concurrently, a network analyzer was used to perform a frequency sweep near the first mode to characterize its amplitude-frequency response. The results show a clear upward shift of the first modal frequency as the second mode’s amplitude increases. Also, this frequency shift reveals a strong quadratic relationship against the second mode’s amplitude (\(\varDelta {f}_{1}\propto {{a}_{2}}^{2}\)), which aligns with theoretical predictions. Corresponding measurements for the second mode exhibit analogous behavior, as shown in Fig. 5d. Increase of the first mode’s amplitude induces a frequency shift of the second mode (\(\varDelta {f}_{2}\propto {{a}_{1}}^{2}\)). These experimental observations demonstrate excellent agreement with the numerical simulations, validating both the dispersive coupling mechanism and the accuracy of the theoretical model.
Closed-loop tests
The dual-mode closed-loop circuit incorporating constant-amplitude AGC and dual differential detection was implemented, and Fig. 6a shows the two sinusoidal output signals under dual-mode closed-loop operation. The short-term frequency stability was characterized at 20 °C and 110 kPa, as presented in Fig. 6b. Over a 7200-second measurement period, the first modal frequency remained within 65458.28 ± 0.1 Hz, and the second modal frequency remained within 169172.80 ± 0.25 Hz, demonstrating good short-term stability and validating the effectiveness of the dual-mode closed-loop system in controlling dispersive coupling and nonlinearity.

a Two sinusoidal output signals from the sensor under closed-loop control. b Short-term frequency stability of the sensor’ first and second mode under dual-mode closed-loop operation
Performance tests
The performance of the dual-mode closed-loop pressure sensor was comprehensively evaluated. Figure 7a, b illustrate the relationship between frequencies of the sensor and changes in pressure and temperature. The pressure sensitivity of the sensor’s first mode is approximately 115.24 Hz/kPa, with a temperature sensitivity of about -0.64 Hz/°C. The pressure sensitivity of the second mode is approximately 160.2 Hz/kPa, with temperature sensitivity of about -2.09 Hz/°C.

a The first and second modal frequencies of the sensor versus pressure from 5 kPa to 100 kPa. b The first and second modal frequencies versus temperature from -20 °C to 80 °C (the dotted lines represent linear fits to the data). c Fitting error surface of the sensor by using a binary fifth-order polynomial. d Error results of pressure cycling tests. e Long-term monitoring results of the dual-mode pressure sensor under constant environmental conditions (20 °C, 110 kPa) over 180 hours
The sensor underwent multiple pressure cycle tests across various temperatures, and a binary fifth-order polynomial was used to fit the test results of dual-mode frequencies, realizing the inverse solution of pressure, as follows:
Where kij are polynomial coefficients.
As a benchmark, single-mode operation (first mode only) results in a temperature-induced frequency drift of 63.2 Hz over -20 to 80 °C, translating to a substantial pressure error of 548 Pa (accuracy of approximately 0.58% FS).
In contrast, the dual-mode sensing scheme demonstrates excellent in-situ temperature compensation and pressure measurement performance. Within the working range of 5 to 100 kPa and -20 to 80 °C, the fitting accuracy for the dual-mode pressure sensing achieves approximately ±0.009% FS, as shown in Fig. 7c. Furthermore, the calculated maximum repeatability error is about 4 Pa (0.0042% FS), and the maximum pressure hysteresis error is approximately 6.5 Pa (0.0068% FS), as illustrated in Fig. 7d. Combining these errors, the overall accuracy of the sensor is approximately 0.012% FS.
Figure 7e presents the long-term monitoring results of the dual-mode pressure sensor under constant environmental conditions (20 °C, 110 kPa) over a duration of 180 hours (7.5 days). The first and second modal frequencies display a maximum variation of approximately 1 Hz. Consequently, the derived pressure error is constrained within ±10 Pa ( ±0.01% FS) throughout the entire test.
Table 1 compares this work with recent studies on resonant pressure sensors. The proposed dual-mode sensing scheme achieves excellent in-situ temperature compensation, high measurement accuracy, and good stability. And the sensor features a simple structure, holding promise for further miniaturization and cost reduction in design and manufacturing. Furthermore, this scheme can be extended to multi-parameter sensing. The development of dual-mode and ultimately multi-mode technologies represents a significant step toward the intellectualization and miniaturization of resonant sensors.
Conclusion
This paper investigated the dual-mode dispersive coupling in a double-clamped microbeam through theoretical analysis and experimental study, and analyzed the mutual influence between the amplitudes and frequencies of the resonator’s modes under dual-mode vibration conditions, as well as the implications for sensing applications. Based on constant-amplitude AGC and dual differential detection, a dual-mode vibration signal decoupling and closed-loop control approach was proposed, achieving a simple and efficient decoupled detection of the dual-mode vibration signals and enabling real-time, synchronous readout of the dual-mode frequencies. Also, this approach ensures linear vibration while controlling the strength of dispersive coupling, guaranteeing the stability and repeatability of the dual-mode closed-loop system. Furthermore, a resonant pressure sensor was designed and fabricated to validate the effectiveness of the proposed scheme. Test results demonstrated that the dual-mode pressure sensor exhibits excellent in-situ temperature compensation and pressure measurement performance, as evidenced by its high fitting accuracy of ±0.009% FS, good repeatability of 0.0042% FS, pressure hysteresis of 0.0068% FS, and overall high accuracy of ±0.012% FS. Moreover, this scheme holds potential for multi-parameter measurements and contributes to the advancement of resonant sensors toward miniaturization and intelligence.
References
Wei, X. et al. MEMS huygens clock based on synchronized micromechanical resonators. Engineering 36, 124–131, https://doi.org/10.1016/j.eng.2023.12.013 (2024).
Dinh, T. et al. Micromachined mechanical resonant sensors: from materials, structural designs to applications. Adv. Mater. Technol. 9, 2300913. https://doi.org/10.1002/admt.202300913 (2024).
Sun, J. et al. Novel nondelay-based reservoir computing with a single micromechanical nonlinear resonator for high-efficiency information processing. Microsyst. Nanoeng. 7, 83, https://doi.org/10.1038/s41378-021-00313-7 (2021).
Han, X. et al. Advances in high-performance MEMS pressure sensors: design, fabrication, and packaging. Microsyst. Nanoeng. 9, 156, 10.1038/s41378-023-00620-1 (2023).
Li, X. et al. Integrated isolation structure for reducing thermal stresses of resonant pressure microsensor. IEEE Sens. J. 24, 38787–38793, https://doi.org/10.1109/JSEN.2024.3476478 (2024).
Xiang, C. et al. A resonant pressure microsensor with temperature compensation method based on differential outputs and a temperature sensor. Micromachines 11, 1022 (2020).
Song, J. et al. Design and characterization of a piconewton MEMS force sensor. Measurement 253, 117482, https://doi.org/10.1016/j.measurement.2025.117482 (2025).
Xu, Y., Yang, Q., Song, J. & Wei, X. Sensitivity enhancement of nonlinear micromechanical sensors using parametric symmetry breaking. Microsyst. Nanoeng. 10, 158, https://doi.org/10.1038/s41378-024-00784-4 (2024).
Zhang, H. et al. Mode-localized accelerometer in the nonlinear Duffing regime with 75 ng bias instability and 95 ng/√Hz noise floor. Microsyst. Nanoengineering 8, 17, https://doi.org/10.1038/s41378-021-00340-4 (2022).
Zhu, B. et al. Temperature compensation of MEMS resonant accelerometer based on multiple parameter decoupling from single resonator. IEEE Sens. J. 25, 2897–2904, https://doi.org/10.1109/JSEN.2024.3511619 (2025).
Zhou, X. et al. Dynamic modulation of modal coupling in microelectromechanical gyroscopic ring resonators. Nat. Commun. 10, 4980. https://doi.org/10.1038/s41467-019-12796-0 (2019).
Wang, L. et al. Multi-DoF AlN-on-SOI BAW MEMS resonators with coated ZIF-8 for gas sensing application. Microsyst. Nanoengineering 11, 69, https://doi.org/10.1038/s41378-025-00917-3 (2025).
Zhang, H. et al. Coherent energy transfer in coupled nonlinear microelectromechanical resonators. Nat. Commun. 16, 3864. https://doi.org/10.1038/s41467-025-59292-2 (2025).
Li, H. et al. Synchronous detection of dual signals based on constant-drive technique of weakly coupled resonators. Microsyst. Nanoengineering 11, 80, https://doi.org/10.1038/s41378-025-00954-y (2025).
Zhou, M. et al. A digital closed-loop control system for MEMS resonant pressure sensors based on a quadrature phase-locked loop. IEEE Sens. J. 24, 10355–10363, https://doi.org/10.1109/JSEN.2024.3365864 (2024).
Yao, J. et al. A low-temperature-sensitivity resonant pressure microsensor based on eutectic bonding. IEEE Sens. J. 22, 9321–9328, https://doi.org/10.1109/JSEN.2022.3164946 (2022).
Lu, Y. et al. An oil-filled MEMS resonant pressure sensor based on electrostatic stiffness modulation. IEEE Electron Device Lett. 44, 2027–2030, https://doi.org/10.1109/LED.2023.3322318 (2023).
Wang, S., Ma, Y., Xu, W., Liu, Y. & Han, F. Temperature compensation of MEMS resonant accelerometers with an on-chip platinum film thermometer. J. Micromech. Microeng. 33, 075004, https://doi.org/10.1088/1361-6439/acd78c (2023).
Xia, W. et al. An amplitude-based temperature compensated MEMS resonant pressure sensor with single resonator. Measurement 241, 115683. https://doi.org/10.1016/j.measurement.2024.115683 (2025).
Wang, Z. et al. A compact temperature controller for MEMS vibratory gyroscopes using thermoelectric cooler. IEEE Trans. Electron Dev. 71, 3888–3894, https://doi.org/10.1109/TED.2024.3392184 (2024).
Feng, T., Yuan, Q., Yu, D., Wu, B. & Wang, H. The Oven-controlled MEMS oscillators in timing and sensing applications: a review. IEEE Sens. J. 23, 17854–17867, https://doi.org/10.1109/JSEN.2023.3286897 (2023).
Feng, T., Yuan, Q., Yu, D., Wu, B. & Wang, H. Concepts and key technologies of microelectromechanical systems resonators. Micromachines 13, 2195 (2022).
Kusters, J. A., Fischer, M. C. & Leach, J. G. dual mode operation of temperature and stress compensated crystals. In 32nd Annual Symposium on Frequency Control. 389-397 (1978).
Vig, J. R. Temperature-insensitive dual-mode resonant sensors - a review. IEEE Sens. J. 1, 62–68, https://doi.org/10.1109/JSEN.2001.923588 (2001).
Fu, J. L., Tabrizian, R. & Ayazi, F. Dual-Mode AlN-on-Silicon Micromechanical Resonators for Temperature Sensing. IEEE Trans. Electron Devices 61, 591–597, https://doi.org/10.1109/TED.2013.2295613 (2014).
Koskenvuori, M., Kaajakari, V., Mattila, T. & Tittonen, I. Temperature measurement and compensation based on two vibrating modes of a bulk acoustic mode microresonator. In 2008 IEEE 21st International Conference on Micro Electro Mechanical Systems. 78-81 (2008).
He, X. L. et al. Film bulk acoustic resonator pressure sensor with self temperature reference. J. Micromech. Microeng. 22, 125005, https://doi.org/10.1088/0960-1317/22/12/125005 (2012).
Sui, W. et al. Micromachined thin film ceramic pzt multimode resonant temperature sensor. IEEE Sens. J. 24, 7273–7283, https://doi.org/10.1109/JSEN.2023.3294125 (2024).
Westra, H. J. R., Poot, M., van der Zant, H. S. J. & Venstra, W. J. Nonlinear Modal Interactions in Clamped-Clamped Mechanical Resonators. Phys. Rev. Lett. 105, 117205. https://doi.org/10.1103/PhysRevLett.105.117205 (2010).
Zhang, B., Yan, Y., Dong, X., Dykman, M. I. & Chan, H. B. Frequency stabilization of self-sustained oscillations in a sideband-driven electromechanical resonator. Phys. Rev. Appl. 22, 034072. https://doi.org/10.1103/PhysRevApplied.22.034072 (2024).
Yousuf, S. M. E. H., Shaw, S. W. & Feng, P. X. L. Nonlinear coupling of closely spaced modes in atomically thin MoS2 nanoelectromechanical resonators. Microsyst. Nanoeng. 10, 206, https://doi.org/10.1038/s41378-024-00844-9 (2024).
Sun, X. et al. Electrostatic nonlinear dispersive parametric mode interaction. Nonlinear Dyn. 111, 3081–3097, https://doi.org/10.1007/s11071-022-08007-z (2023).
Věříš, J. Temperature compensation of silicon resonant pressure sensor. Sens. Actuators A: Phys. 57, 179–182, https://doi.org/10.1016/S0924-4247(97)80111-2 (1996).
Azevedo, R. G., Huang, W., O’Reilly, O. M. & Pisano, A. P. Dual-mode temperature compensation for a comb-driven MEMS resonant strain gauge. Sens. Actuators A: Phys. 144, 374–380, https://doi.org/10.1016/j.sna.2008.02.007 (2008).
Jaber, N., Ilyas, S., Shekhah, O., Eddaoudi, M. & Younis, M. I. Multimode MEMS resonator for simultaneous sensing of vapor concentration and temperature. IEEE Sens. J. 18, 10145–10153, https://doi.org/10.1109/JSEN.2018.2872926 (2018).
Hanay, M. S. et al. Single-protein nanomechanical mass spectrometry in real time. Nat. Nanotechnol. 7, 602–608, https://doi.org/10.1038/nnano.2012.119 (2012).
Gourlat, G. et al. Dual-mode NEMS self-oscillator for mass sensing. In 2015 Joint Conference of the IEEE International Frequency Control Symposium & the European Frequency and Time Forum. 222-225 (2015).
Gourlat, G. et al. Simultaneous mode tracking for sensing applications with dual-mode heterodyne NEMS oscillator. In 2016 IEEE SENSORS. 1-3 (2016).
Xu, L. et al. A Closed-Loop System for Resonant MEMS Sensors Subject to Blue-Sideband Excitation. J. Microelectromechanical Syst. 31, 690–699, https://doi.org/10.1109/JMEMS.2022.3183021 (2022).
Xi, J. et al. Multiple parameter decoupling for Resonant MEMS sensors exploiting blue sideband excitation. J. Microelectromech. Syst. 32, 426–436, https://doi.org/10.1109/JMEMS.2023.3293464 (2023).
Nayfeh, A. H. & Mook, D. T. Nonlinear Oscillations, Ch. 6 (1979).
Timoshenko, S. P., Gere, J. M. & Prager, W. Theory of Elastic Stability, Second Edition. J. Appl. Mech. 29, 220–221 (1962).
Hopcroft, M. A., Nix, W. D. & Kenny, T. W. What is the Young’s Modulus of Silicon?. J. Microelectromechanical Syst. 19, 229–238, https://doi.org/10.1109/JMEMS.2009.2039697 (2010).
Xie, B. et al. A lateral differential resonant pressure microsensor based on SOI-glass wafer-level vacuum packaging. Sensors 15, 24257–24268 (2015).
Acknowledgements
This work was funded in part by the National Key R&D Program of China under Grant 2024YFB3212000, in part by the National Natural Science Foundation of China under Grant 62301536 and Grant 62121003, in part by the Youth Innovation Promotion Association CAS Grant 2023134 and Grant 2022121, in part by the Instrument Research and Development of CAS under Grant PTYQ2024BJ0009.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Xia, W., Qin, J., Lu, Y. et al. Dispersive coupling and dual-mode sensing of a micromechanical resonator. Microsyst Nanoeng 12, 29 (2026). https://doi.org/10.1038/s41378-025-01101-3
Received:
Revised:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41378-025-01101-3
