
Abstract
The interplay between vesicles and their enclosed filaments is fundamental to the morphogenesis, motility, and mechanical response of biological cells, artificial cells, and biomimetic robotic systems. By engineering responsiveness or interaction capabilities—such as long-range filament interactions—these filaments can function as active elements that regulate system behavior. Here, we combine theoretical modeling and molecular dynamics simulations to demonstrate how interacting filament loops within vesicles induce diverse, system-wide morphological transformations. These transformations are driven by inter- and intrafilament interactions, as well as the competing deformations of both the vesicle and its encapsulated filaments, with interfilament interactions playing a dominant role. We observe phenomena including filament buckling and reorientation, vesicle stretching, and convex-to-concave shape transitions. Morphological phase diagrams are constructed for both vesicles under zero osmotic pressure and those with a fixed relative volume, and we further explore the packing of inhomogeneous filament loops. These results offer quantitative design principles for artificial cellular systems in which filament interactions act as levers to control and stabilize emergent morphologies, laying the groundwork for the development of adaptive soft robotics.
Similar content being viewed by others


Introduction
The interplay between deformable membranes and enclosed filaments governs key aspects of morphogenesis, motility, and mechanical adaptability in biological cells as well as in vesicle-based artificial cellular systems1,2. From a mechanical perspective, cells and vesicles encapsulate the fundamental physics of membrane-mediated confinement3,4,5, while their enclosed filamentous components—whether cytoskeletal polymers, nucleated microtubules, or engineered materials—act as structural and functional scaffolds that regulate system-wide behavior through mechanical and biophysical feedback. In living cells, this physical dialogue manifests in diverse processes such as microtubule-driven platelet activation6, actin-mediated pseudopod formation during cell locomotion1, and membrane tubulation in cell uptake7. Synthetic analogs such as vesicles encapsulating actin filaments and microtubules8,9,10,11,12,13,14,15, or self-propelled rigid rods and cargoes16,17,18,19,20, recapitulate similar behaviors on similar length scales yet with reduced biological complexity. These systems offer valuable platforms for uncovering design principles of shape-programmable structures with potential applications in artificial cells. Recent theoretical advances have established a full spectrum of packing morphologies for single flexible filaments—both open and closed—within vesicles, delineating the conditions for transitions between configurations21,22,23.
While these investigations have provided valuable insights, a key unresolved question is how competing energy hierarchies—spanning filament flexibility, tunable interfilament interactions, and membrane deformation—collaborate to orchestrate and stabilize morphological transitions in filaments–vesicle systems. Understanding these interactions is essential for bridging the gap between the inherent complexity of biological systems and the rational design of synthetic cellular systems. Notably, long-range interfilament interactions (e.g., electrostatic forces), which are prevalent in biological processes like polyelectrolyte condensation24,25 and viral genome packaging26,27, remain underexplored in the context of vesicle morphogenesis.
In this work, we employ theoretical modeling and molecular dynamics (MD) simulations to elucidate the mechanisms underlying vesicle morphogenesis driven by enclosed flexible filament loops, with long-range interactions capturing both inter- and intrafilament forces. We systematically explore how variations in filament stiffness, length, and interaction strength influence system morphologies in vesicles under zero osmotic pressure or maintained a fixed volume. By establishing symmetry-based morphological categorizations and phase diagrams, we highlight key features such as filament buckling, reorientation, and vesicle stretching or inflation. Energy and membrane tension analysis further reveal the mechanical pathways driving these transitions. We also discuss possible implications of our results on programmable cellular systems.
Results
Model and parametrization
Consider two inextensible, uniformly charged filament loops, f1 and f2, confined within a lipid vesicle of fixed area A(= 4πR2), where R is the effective vesicle radius. The vesicle can either freely adjust its volume at zero osmotic pressure difference (Δp = 0) or maintain a fixed volume V. Filaments f1 and f2 have lengths L1 and L2, respectively, and are uniformly charged with like charges (e.g., negative in Fig. 1) at densities λ1 and λ2. Here, electrostatic interactions are employed to model the tunable filament interaction. The nonlocal Coulomb interaction causes the filaments to repel each other, while the vesicle confinement imposes elastic and geometric constraints to the filaments. The competition between the repulsive Coulomb interaction and the bending resistance of the filaments and vesicle membrane leads to a complex morphological evolution of the filaments–vesicle system.

The filaments f1 and f2, carrying like electrical charges (e.g., negative here), repel each other, resulting in a competition between repulsive intra- and interfilament interactions and the elastic deformation of both the filaments and the confining vesicle.
It is important to note that the electrostatic interaction here does not correspond to a specific physical mechanism, but rather serves as a generic, tunable model for long-range filament-filament interactions. This abstraction enables us to systematically probe how nonlocal repulsion modulates vesicle morphology. Experimentally, such interactions can be realized using stimulus-responsive microscale filaments, for example, through magnetic self-assembly of lipid-coated nanoparticles or electrospinning of magnetically or optically active polymers. Related experimental strategies and their relevance to our findings are further discussed in the “Discussion”.
Throughout the main text, we focus on the long-range limit, corresponding to a salt-free environment where electrostatic interactions are effectively unscreened. This regime provides a simplified setting allowing us to isolate the conceptual role of unscreened electrostatics in filaments-vesicle organization. While not intended to replicate specific biological conditions, this limit serves as a reference point for understanding the qualitative role of interaction range in shaping vesicle morphology.
To assess the robustness of our findings with respect to this modeling assumption, we also perform simulations incorporating electrostatic screening, modeled via a screened Coulomb potential with an adjustable Debye length. The results on screening-dependent modulation are analyzed in detail in the “Discussion” and Supplementary Information. Briefly, we find that under weak screening, the filament configurations and vesicle morphologies remain qualitatively similar to those observed in the unscreened case, indicating that the shape transitions are robust against mild attenuation. In contrast, strong screening substantially reduces interfilament repulsion, requiring higher interaction strength to achieve comparable morphological changes.
The total system energy is Etot = Em + Ef + Eintra + Einter, consisting of the bending energy of the vesicle membrane Em, bending energy of two filaments Ef, intrafilament interaction energy Eintra, and interfilament interaction energy Einter. Adopting the Helfrich theory for the membrane28, the wormlike chain model for the filaments29, and the Coulomb’s inverse-square law for interaction potentials, these four energy components are
where κ, H, and dA represent the bending rigidity, mean curvature, and surface element of the membrane, respectively; Ci is the local curvature of the filament fi (i = 1, 2) modeled as a space curve with its centerline position vector \({{{{\bf{r}}}}}_{i}^{{{{\rm{f}}}}}({s}_{i})\), and Yi, Ii, si, and dsi denote the Young’s modulus, moment of inertia, arclength, and curve element of the filament fi, respectively; λi is the uniformly distributed charge density (per unit length), ε0 is the vacuum permittivity, εr is the relative permittivity of the solvent (e.g., εr ≈ 80 for water at room temperature). Hereinafter, the subscripts 1 and 2 refer to quantities pertaining to filaments f1 and f2, respectively. In Eintra, a mollifier M is introduced to regularize the singular self-interaction electrostatic potential. A specific form is taken as \(M={\eta }_{i}^{4}/{({\eta }_{i}+{e}^{-7{\eta }_{i}})}^{4}\) with \({\eta }_{i}=\sin (\pi \left\vert {s}_{i}-{\bar{s}}_{i}\right\vert /{L}_{i})\)30,31. For two circular charged filament loops infinitely far away from each other as a reference state, the corresponding intrafilament interaction energy is \({E}_{{{{\rm{intra}}}}}^{0}=0.1286({\lambda }_{1}^{2}{L}_{1}+{\lambda }_{2}^{2}{L}_{2})/({\varepsilon }_{0}{\varepsilon }_{{{{\rm{r}}}}})\).
For simplicity in the following analysis, we consider two identical filaments (L1 = L2 = L, Y1I1 = Y2I2 = YI, and λ1 = λ2 = λ) unless otherwise specified. At zero osmotic pressure (Δp = 0) or a given reduced vesicle volume v = V/(4πR3/3), the total system energy is
a function of the relative stiffness YI/(κR) and length L/(πR) of the filaments, as well as the dimensionless Coulomb interaction strength χ = λ2R/(4πε0εrκ).
Here, we employ both numerical optimization and MD simulations to identify the minimum energy state for a given set of parameters (YI/(κR), L/(πR), χ), with methodological details in the Methods section and Supplementary Figs. S1–S4.
At Δp = 0, the spherical filament-free vesicle offers isotropic confinement. In contrast, when the vesicle’s reduced volume v is specified, its shape depends on v: at v = 1, it is spherical, but as v decreases, it transforms from prolate to oblate and then to a stomatocyte shape32. These nonspherical forms provide anisotropic confinement. The behavior of the interacting filaments–vesicle system under both the isotropic and anisotropic confinements is elucidated in the following analysis.
Interacting filaments–vesicle system at zero osmotic pressure difference
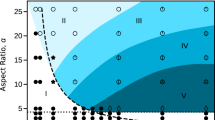
We first investigate system morphologies for highly flexible filaments (YI/(κR) = 0.1) at Δp = 0 (Fig. 2), focusing on how filament-vesicle interactions are regulated by the relative filament length L/(πR) and Coulomb interaction strength χ = λ2R/(4πε0εrκ). Based on point group symmetry, the system morphologies at different (L/(πR), χ) values fall into four symmetry groups: D∞h, D2, C2h, and Ci. For small values of (L/(πR), χ) (e.g., morphology at (1,0.4) in Fig. 2a), weak repulsion between the charged filaments results in minimal vesicle deformation, with only slight stretching due to weak pushing forces on the inner membrane. As χ increases, the vesicle transitions from an axisymmetric convex to a concave morphology (e.g., from (1,3) to (1,30) in Fig. 2a). Increasing L/(πR) leads to lateral inflation and vertical shortening (comparing morphologies at (1,0.4) and (5/3,0.4)). MD simulations (Fig. 2b) yield morphologies consistent with numerical results.

Representative equilibrium system morphologies for highly flexible filaments (YI/(κR) = 0.1) obtained from numerical optimization (a) and MD simulations (b). c–e Morphological phase diagrams in terms of L/(πR) and χ for YI/(κR) = 0.1, 1, and 10, respectively. In (a), respective values of (L/(πR), χ) are provided below each morphology. In (b), corresponding values of (L/(πR), 1/εr, bs/Σ) are displayed, where bs is the simulation box size adjusted to accommodate elongated vesicles and Σ is the length unit in MD simulations. The length scales in (a) and (b) are identical. Symbols in c–e correspond to the framed morphologies in panel (a), Supplementary Fig. S7 and Fig. S8, respectively. The solid (dashed) phase boundaries denote discontinuous (continuous) morphological transitions.
With a further increase in L/(πR), the compressive forces exerted by the vesicle membrane on the filaments intensify, destabilizing their position and morphology and triggering a system-wide transition. At small χ, axisymmetric morphologies with inversion symmetry D∞h transform into those with D2 symmetry (e.g., morphologies at (2,2) and (7/3,2) in Fig. 2a). At high χ, these D∞h morphologies change into C2h (e.g., morphology at (4/3,15)). The D2 symmetry lacks mirror planes but features three twofold rotation axes, and C2h has a twofold axis of rotation and a reflection plane. Regarding the filament loops as hand contours, the long, flexible filaments in D2 system resemble a palm-to-palm handholding configuration with curled fingers. Increasing χ, the inter- and intrafilament interactions strengthen, repelling and straightening the saddle-shaped filaments. This drives the transition from D2 to Ci symmetry (e.g., morphology at (2,10)), where the vesicle adopts a rodlike shape with inversion as its sole symmetry element besides the identity. For the D2 symmetry system at large L/(πR) and small χ, the highly flexible filaments with YI/(κR) = 0.1 minimally deform the vesicle, and their configurations approximate perturbed spherical curves (Supplementary Figs. S5 and S6)33,34. For YI/(κR) = 1 and 10, representative system morphologies are presented in Supplementary Figs. S7 and S8, respectively.
With knowledge of all possible system morphologies at Δp = 0, we construct the corresponding morphological phase diagrams in Fig. 2c–e as functions of the relative filament length L/(πR) and Coulomb interaction strength χ. The morphological transitions at YI/(κR) = 0.1 and 1 exhibit qualitative similarity but differ quantitatively. One difference is that in the D∞h and D2 phases, with relatively large L/(πR) and small χ, stiffer filaments deform the vesicle into an oblate shape (Supplementary Fig. S7a), whereas highly flexible filaments induce only minor deviations from a spherical morphology (Fig. 2a). Additionally, increasing YI/(κR) from 0.1 to 1 expands the D∞h region, shifts the D2 region rightward, and moves the C2h region upward at large L/(πR), consistent with the increased resistance of stiffer loops to buckling at longer critical lengths. At YI/(κR) = 10, these trends intensify: the D∞h region further expands, the D2, C2h, and Ci regions shift rightward and upward, respectively, and the D2 phase disappears entirely within the studied L/(πR) − χ region (Fig. 2e).
To elucidate the mechanisms underlying the morphological phase transitions, the total energy change and its components are analyzed in Fig. 3. In the Δp = 0 case, the ground energy state consists of a spherical vesicle with bending energy 8πκ and two infinitely separated circular charged filaments, each of length L and charge density λ. The total energy change is ΔEtot = ΔEm + ΔEf + ΔEintra + Einter, where ΔEm = Em − 8πκ, ΔEf = Ef − 4π2YI/L, and ΔEintra = Eintra − 1.029πκχL/R. Energy profiles at χ = 20 (Fig. 3) show that the interfilament interaction energy Einter dominates ΔEtot throughout the vesicle evolution. As L/(πR) increases, ΔEtot exhibits a kink, marking a discontinuous morphological transition. In the transition from D∞h (orange) to the C2h phase (cyan), the filaments reorient and undergo significant in-plane bending, stretching the vesicle and sharply increasing both ΔEm and ΔEf. The transition from the C2h to the Ci phase (purple) is continuous. With increasing filament bending stiffness, the energy contribution from filament bending grows. In the C2h and Ci phases, ΔEf plays a minor role at YI/(κR) = 0.1 and 1 (Fig. 3a, b) but becomes comparable to ΔEm and ΔEintra at YI/(κR) = 10 (Fig. 3c).

a–c show the total energy change ΔEtot and its components ΔEm, ΔEf, ΔEintra, and Einter for relative filament stiffness values of YI/(κR) = 0.1, 1, and 10, respectively.
The morphological transition can also be understood from the evolution of the membrane tension. As χ increases, the growing interfilament repulsion stretches the confining vesicle, raising membrane tension σ (Fig. 4). This increased tension σ enhances radial contraction of the elongated vesicle. When the resulting distributed compressive force on the filaments becomes sufficiently large, they destabilize, undergoing rotation and bending, which drives the system’s morphological transitions.

The σ–χ profiles are evaluated at Δp = 0 and L/(πR) = 1.867 for YI/(κR) = 0.1, 1, and 10. The tension σ(= −∂Etot/∂A) is a Lagrange multiplier conjugated to the vesicle area A. Sharp drops and jumps in the σ–χ profiles mark discontinuous morphological transitions, with morphologies before and after transitions illustrated by arrows.
While this general mechanism applies across a range of parameters, the specific evolution of the membrane tension during the transition depends on the filament stiffness. For example, although both cases with YI/(κR) = 1 and 10 undergo a similar morphological transition from an oblate axisymmetric shape (D∞h) to a centrosymmetric elongated shape (C2h) with a central neck, the associated membrane tension exhibits opposite sharp changes: it drops for flexible filaments but jumps for stiff ones. This contrast arises from how filament stiffness modulates the geometric and mechanical constraints on the vesicle.
In systems with flexible filaments, the C2h configuration allows the filaments to deform and adapt more easily, thereby exerting weaker geometric and mechanical constraints on the vesicle. This flexibility leads to a lower membrane tension compared to the case with stiff filaments, which resist deformation and act as stronger internal constraints. As a result, the vesicle must accommodate these stiff structures by increasing its membrane tension, even when the overall morphology appears similar, as confirmed in Supplementary Fig. S9.
Supplementary Fig. S9 further indicates that at low filament stiffness, the vesicle membrane tension is lower than that of the corresponding oblate axisymmetric state. As YI/(κR) increases, the tension surpasses that of the axisymmetric configuration and eventually saturates at a plateau. This behavior explains the sharp drop observed at YI/(κR) = 1 and the jump at YI/(κR) = 10 in the σ–χ profiles (Fig. 4).
Interacting filaments–vesicle system at a given vesicle volume
In preceding cases, the vesicles at Δp = 0 provide an isotropic confinement for the filaments. Here, we investigate how the mechanical interplay between the charged filaments and the vesicle is influenced by a nonspherical, anisotropic confinement, achieved by specifying a reduced vesicle volume at v = 0.9 for example.
Figure 5a, b shows representative system morphologies for highly flexible filaments (YI/(κR) = 0.1) at v = 0.9, and the corresponding morphological phase diagram is established in Fig. 5c. The system morphologies at different (L/(πR), χ) values are categorized into symmetry groups: D∞h, C2h, D2h, and D2, where D2h symmetry has three mutually perpendicular reflection planes and an inversion center. At small L/(πR), the filaments arranged in circular configurations with axisymmetric prolate vesicles (D∞h symmetry), which transition from convex at smaller L/(πR) (e.g., morphologies at (1,1) and (1,10) in Fig. 5a) to concave shapes at larger L/(πR) (e.g., morphology at (11/8,1)). Increasing Coulomb interaction strength χ leads to progressive elongation of the axisymmetric vesicles.

Representative equilibrium system morphologies for highly flexible filaments (YI/(κR) = 0.1) from numerical optimization (a) and MD simulations (b). c–e Morphological phase diagrams in terms of L/(πR) and χ for YI/(κR) = 0.1, 1, and 10, respectively. In a, (L/(πR), χ) values are provided below each morphology, while in (b), corresponding values of (L/(πR), 1/εr, bs/Σ) are given. The length scales in (a) and (b) are identical. The filament interaction strength in the MD simulations increases as εr decreases. Symbols in c–e correspond to the framed morphologies in (a), Supplementary Figs. S10, and Fig. S11. The solid (dashed) phase boundaries denote discontinuous (continuous) morphological transitions.
As in the Δp = 0 case, increasing L/(πR) further destabilizes filament loops, driving system transitions from D∞h to C2h and D2 morphologies. However, a key difference at v = 0.9 is that C2h morphologies appear at small χ, while D2 morphologies emerge at large χ (Fig. 5c). This difference arises from the anisotropic confinement provided by the prolate vesicle, which naturally offers the filament loops suitable inclined positions to form the C2h morphologies (e.g., morphology at (1.6,1) in Fig. 5a), eliminating the need for high χ, whereas the round vesicles at Δp = 0 require elongation (induced by stronger interfilament repulsion at high χ) to accommodate the inclined loops. The D∞h-to-C2h transition is discontinuous, evidenced by abrupt filament sliding and reorientation (e.g., morphologies at (11/8,1) and (1.6,1)). Morphologies from MD simulations closely match those from numerical optimization (Fig. 5b).
The D2 system morphologies, where the filaments resemble a palm-to-palm handholding configuration, are energetically preferred by round vesicles. For prolate vesicles at v = 0.9, achieving this state requires longer filament loops and higher χ to induce a more spherical geometry. This translates to expanded lateral dimensions and a reduced vertical dimension for the prolate vesicle (e.g., morphologies at (5/3,10) and (2.033,40) in Fig. 5a). Consequently, the D∞h-to-D2 transition occurs at larger values of (L/(πR), χ), compared to the D∞h-to-C2h transition (Fig. 5c).
For the C2h morphologies, a further increase in L/(πR) leads to a transition to D2 at high χ (e.g., morphology at (2.267,10) in Fig. 5a), and to D2h, then D2, at small χ (e.g., morphologies at (2.1,1) and (2.267,1)), with longer loops exhibiting greater bending. In D2h morphologies, the filaments elongate and reorient parallel to the vesicle’s long axis. Unlike other discontinuous transitions (solid phase boundaries in Fig. 5c), the C2h-to-D2h transition is continuous (dashed phase boundary).
Comparing phase diagrams at YI/(κR) = 1 and 10 in Fig. 5d, e with that at YI/(κR) = 0.1 in Fig. 5c, structural changes in morphology emerge as YI/(κR) increases. In D2h and D2 morphologies, the filament loops experience significant in-plane or out-of-plane bending (Supplementary Figs. S10 and S11). As YI/(κR) increases, this bending instability necessitates larger L/(πR) and χ, shifting the D2h and D2 regions toward the upper right. The gaps between C2h and D2h, as well as between C2h and D2, are occupied by the D∞h phase (Fig. 5d, e), where the filament loops remain circular. Further morphological results indicate that, for YI/(κR) = 1 and 10 (Fig. 5d, e), the left D∞h-to-C2h transition is discontinuous, marked by abrupt filament sliding and reorientation, whereas the right C2h-to-D∞h transition is continuous, exhibiting smooth filament rearrangement (Supplementary Figs. S10 and S11).
The energy analysis at v = 0.9 is given in Supplementary Fig. S12. Here, the ground state comprises a prolate vesicle with bending energy 29.90κ32 and two circular, charged filaments (length L, charge density λ), positioned at infinite separation. Consequently, the changes in energy are ΔEm = Em − 29.90κ, ΔEf = Ef − 4π2YI/L, and ΔEintra = Eintra − 1.029πκχL/R. The energy profiles at χ = 1 in Supplementary Fig. S12 indicate that the interfilament interaction energy Einter dominates the total energy evolution, similar to the Δp = 0 case. For small values of (L/(πR), χ), the filaments in circular configurations are far apart, resulting in negligible ΔEintra. With increasing L/(πR), the reorienting filaments undergo pronounced in-plane and out-of-plane bending, which raises ΔEf. In the D2 phase (green), the two approaching filaments bend more severely, causing substantial increases in both ΔEintra and ΔEf. For filaments with YI/(κR) = 1 and 10 (Supplementary Fig. S12b, c), ΔEf remains minor relative to ΔEm in the C2h region (cyan), reflecting only slight filament deformation.
For a filament-free vesicle of v = 0.9, the membrane tension is σR2/κ ≈ −5.11. The presence of repelling filaments increases σ as the vesicle is stretched. Fig. 6 shows the evolution of the membrane tension σ with the relative filament length L/(πR) for different filament stiffnesses at χ = 1 and 3. Positive (negative) σ means in-plane membrane tension (compression). Several sharp jumps and drops in σ mark discontinuous phase transitions.

The σ–L/(πR) profiles for different filament stiffness values are evaluated at the interaction strengths χ = 1 and 3, with a reduced volume v = 0.9.
Packing of inhomogeneous filament loops
Filaments within cells can experience localized mechanical property changes due to the influence of specific proteins35. For instance, cofilin-decorated filaments are more flexible than native filaments, and in some cases, cofilin molecules can induce filament breakage36, whereas tropomyosin-troponin complexes increase the bending stiffness of actin filaments by stabilizing the filament structure37. To explore how filament inhomogeneity affects system morphologies, we consider two identical inhomogeneous filaments confined within a vesicle, each composed of flexible (s1) and stiffer (s2) segments (Fig. 7).

Selected equilibrium morphologies obtained from numerical optimization (left panels) and MD simulations (right panels). Cases of Δp = 0 (a) and v = 0.9 (b). For the theoretical modeling, χ = 1 is used. In the MD simulations, the simulation box size is bs = 160Σ, and 1/εr = 0.351 (a) and 0.333 (b). Each inhomogeneous filament has two segments, more flexible segment #1 (light brown or blue) of length Ls1 and bending stiffness Ys1Is1 and stiffer segment #2 (dark brown or crimson) of length Ls2 and bending stiffness Ys2Is2.
Figure 7 shows the system morphologies at Δp = 0 and v = 0.9 for a given filament interaction strength. At Δp = 0, the filaments have Ys1Is1/(κR) = 0.1, Ys2Is2/(κR) = 1, and segment lengths Ls1 = Ls2 = 0.95πR at χ = 1. As shown in Fig. 7a, they resemble a palm-to-palm arrangement with an approximate 90∘ relative orientation. At v = 0.9, filaments with Ys1Is1/(κR) = 1, Ys2Is2/(κR) = 10, and Ls1 = Ls2 = 7πR/6 at χ = 1 exhibit nearly identical orientations (Fig. 7b), with stiffer segments aligned with each other and softer segments similarly positioned. In both cases, the filament deformation localizes at the ends of the relatively flexible segment (light brown or blue) to minimize the energy cost associated with bending the stiffer segment.
Discussion
The phase diagrams in Figs. 2c–e and 5c–e provide a robust quantitative framework for the rational design of artificial cellular architectures. This mechanical roadmap facilitates the systematic selection of filament-vesicle combinations by considering intrinsic material properties, biochemical modulation strategies, and functional integration. For instance, the distinct mechanical roles of cytoskeletal filaments suggest diverse architectural possibilities. Actin filaments, with their semi-flexible persistence lengths, enable adaptive membrane remodeling through buckling and branch reorganization, whereas stiffer microtubule assemblies could serve as anchoring structures to stabilize elongated vesicles. Biochemical strategies—such as cation-induced actin polymerization or protein-mediated modulation of filament stiffness35—can be synergistically combined with membrane-modifying agents (e.g., cholesterol, sphingomyelin, or unsaturated phospholipids) to establish hierarchical stiffness profiles. Moreover, emerging functionalization techniques that involve encapsulating responsive or active filaments within vesicles enable directional deformability.
With the advent of networks composed of programmed vesicles38,39, it is now possible to fabricate vesicular machines with controlled, reversible folding for targeted transport, drug release, and mobility40,41. Under high interaction strength χ and long filament length L, the vesicles containing stiff interacting filament loops elongate more than those with flexible filaments. This deformation feature can be exploited to construct two-layer vesicle structures, wherein one layer comprises vesicle aggregates with flexible filament loops and the other with stiffer filaments. Under high-χ stimuli, these bilayer structures bend and subsequently recover as χ decreases, thereby facilitating gripping, release, and directional transport. Integrating living cells or organelles with artificial cells could further expand biohybrid system applications.
Throughout the main text, we adopt a salt-free environment as the baseline model, in which electrostatic interactions remain effectively unscreened. This idealized setting allows us to isolate the conceptual role of nonlocal repulsion without the complexity introduced by ionic screening. To assess the robustness of our findings under more realistic ionic conditions, we extend our model to incorporate electrostatic screening using a screened Coulomb potential with an adjustable Debye length λD24,42. The Debye length quantifies the range over which electrostatic interactions remain significant; a larger λD corresponds to weaker screening and thus longer-ranged interactions. As detailed in Supplementary Fig. S13 and corresponding supplementary discussion, simulations performed at varying λD reveal that, under weak screening conditions (e.g., λD = 10), filaments-vesicle morphologies remain qualitatively similar to the unscreened cases, indicating that the morphological transitions are robust against mild ionic attenuation. Under strong screening (e.g., λD = 0.1), the effective filament repulsion is substantially reduced, leading to a downward shift of the phase boundary and requiring stronger interaction strength to achieve comparable morphological transitions. These results quantitatively demonstrate how screening modulates long-range interactions and confirm that such interactions effectively drive morphological transitions of the system.
A key step toward experimentally realizing the morphologies predicted in our model is the construction of microscale filaments that actively respond to external stimuli such as magnetic fields, electric fields, or light. Recent advances in soft matter and nanomanufacturing offer promising strategies for building such reconfigurable and stimulus-responsive filaments with tunable mechanics. For instance, Bharti et al. demonstrated the magnetic assembly of ultraflexible microfilaments composed of lipid-coated magnetic nanoparticles held together by nanocapillary forces43. These filaments exhibit exceptional flexibility, reversibility, and the ability to self-close into loops or figure-eight configurations under external magnetic fields. Beyond self-assembly, other fabrication approaches include embedding superparamagnetic nanoparticles into electrospun or wet-spun polymer nanofibers, and incorporating photoresponsive moieties, gold nanorods, or liquid crystal droplets into filament backbones using techniques such as coaxial electrospinning or direct ink writing. These methods allow for programmable filament stiffness, curvature adaptability, and responsiveness to environmental cues. Such capabilities make it feasible to design soft, reconfigurable filaments that recapitulate the confinement-driven shape transformations predicted by our theory.
To explore the magnetic field-based control of the filament interaction, we propose a system composed of one paramagnetic and one diamagnetic filament confined within a vesicle. When exposed to an external magnetic field, the paramagnetic filament acquires a magnetic moment aligned with the field, while the diamagnetic filament develops a moment in the opposite direction (Supplementary Fig. S14). This antiparallel dipole alignment induces a repulsive dipole–dipole interaction along the magnetic field axis. By incorporating the standard dipole–dipole interaction potential44 into both inter- and intrafilament interactions, we reveal a spectrum of vesicle morphologies (Supplementary Fig. S15)—including elongation, flattening, and neck formation—that closely mirror those obtained in the electrostatic case. These results demonstrate that magnetic contrast between filaments can serve as a physically realizable surrogate for nonlocal repulsion. In this context, flexible paramagnetic chains assembled from superparamagnetic beads and diamagnetic filaments formed from carbon-based materials or polymer-coated colloids may provide a viable experimental platform for validating the theoretical predictions.
Although the specific system explored in this study has not yet been directly realized experimentally, our predictions show strong parallels with deformation observed in related biological and biomimetic systems. For example, during mitosis, forces generated by the mitotic spindle lead to elongation and necking of the nuclear envelope45,46, resembling the vesicle morphologies induced by interacting filament loops in our model. Similarly, giant unilamellar vesicles subjected to extensional flow develop elongated and asymmetric morphologies due to flow-induced membrane tension47,48. In both cases, the membrane deformation is driven by internally generated forces (e.g., microtubule polymerization and sliding) or externally imposed hydrodynamic forces. These mechanisms are conceptually similar to the repulsive interactions produced by confined filament loops in our model.
Additional parallels can be drawn with endocytosis, which involves membrane shape transformations such as elongation, necking, and symmetry breaking that are qualitatively similar to those observed in our simulations. Membrane-associated filaments such as dynamin and endosomal sorting complexes required for transport (ESCRT-III) play central roles in driving these transitions. For instance, dynamin helices constrict membrane necks during vesicle scission events49, while ESCRT-III filaments undergo supercoiling and reorganization to remodel membrane geometry50. These examples illustrate how filament-membrane coupling, whether driven actively or arising passively through geometric constraints, can produce complex shape transitions analogous to those captured in our mechanical model. Together, these biological analogies underscore the broader applicability of our framework and suggest that its underlying mechanical principles may be experimentally accessible using either biological analogs or synthetic reconstitution platforms.
Biological and synthetic systems also support the plausibility of ring-like filament structures. For example, Miyazaki et al. showed that polymerizing actin filaments confined within spherical droplets can spontaneously self-organize into equatorial rings driven by filament elasticity and confinement8. Similarly, experimental observations demonstrated that actin filaments cross-linked by proteins such as α-actinin and muscle filamin can form stable ring-like bundles within giant unilamellar vesicles under appropriate conditions9. Another relevant example is the marginal band in blood platelets, a peripheral ring of microtubules that provides internal mechanical support and undergoes buckling transitions during activation6. These examples illustrate that while the closed-loop geometry in our model is idealized, the underlying mechanisms—elastic confinement, curvature-induced organization, and topological coupling—are broadly realized in both synthetic and biological contexts.
In addition to spatial organization, the dynamical nature of filament-vesicle systems also merits consideration. While the present study focuses on equilibrium morphologies, many biological vesicle-filament systems exhibit dynamic remodeling driven by active processes such as filament polymerization, motor-protein forces, and ATP-dependent turnover1. Nonetheless, our results demonstrate that passive mechanical and physical interactions, specifically long-range filament repulsion and elasticity under confinement, are already sufficient to induce robust shape transformations, filament localization, and symmetry breaking. These phenomena mirror qualitative features commonly observed in active systems, suggesting that certain morphogenetic patterns may emerge purely from mechanical coupling, independent of nonequilibrium driving. From this perspective, our model provides a minimal mechanical framework that isolates the role of internal stress and offers a baseline for understanding more complex systems.
Recent studies have indeed shown that active cytoskeletal networks, such as microtubule-motor assemblies, can induce dynamic vesicle shape fluctuations through internally generated stresses15. These systems display pronounced time-dependent behaviors and fluctuation spectra characteristic of nonequilibrium dynamics. In contrast, our equilibrium-based model enables the controlled programming of stable vesicle morphologies through tunable filament interactions. Together, the active and equilibrium perspectives define a broader design space for vesicle-based systems, spanning from fluctuation-induced remodeling and dynamic reconfigurability to shape locking via filament-mediated mechanical feedback.
Building on this foundation, future extensions of our model could incorporate active components such as filament-length evolution, polymerization-driven remodeling, and motor-induced force generation. These additions would allow for the exploration of nonequilibrium shape fluctuations, remodeling pathways, and adaptive morphologies, thereby bridging equilibrium-based design principles with the spatiotemporal complexity of living systems.
In summary, this study reveals how enclosed interacting filament loops drive vesicle morphogenesis, with phase diagrams illustrating the influence of filament stiffness, length, and interaction strength on morphological transitions. For short filaments, increasing interaction strength transforms the vesicle from an axisymmetric convex to a concave shape. At higher filament lengths and interaction strengths, filament loops destabilize, leading to asymmetric morphologies characterized by in- and out-of-plane buckling and reorientation. In vesicles with specified relative volumes, geometric anisotropy alters the sequence of morphological phases compared to those at zero pressure. Energy analysis shows that interfilament interactions are the primary drivers of total energy changes. Our results provide a quantitative foundation for the rational design of artificial, programmable cellular systems and enhance our understanding of cell shaping and stability.
Methods
Numerical optimization
In the numerical optimization, the vesicle morphology is depicted by the membrane position vector rm using a spherical harmonic parameterization21,51,52. In a Cartesian coordinate system Oxyz (Fig. 1), coordinates of rm = (xm, ym, zm) are \({x}^{{{{\rm{m}}}}}=\mathop{\sum }_{l=0}^{{l}_{\max }}\mathop{\sum }_{m=-l}^{l}{C}_{lm}^{x}{y}_{lm}(\theta,\varphi )\) (\({l}_{\max }=5\) is taken) and similar forms for ym and zm by replacing \({C}_{lm}^{x}\) with \({C}_{lm}^{y}\) and \({C}_{lm}^{z}\), respectively. Here, ylm(θ, φ) denotes the real spherical harmonic basis function in terms of the polar angle θ ∈ [0, π] and azimuthal angle φ ∈ [0, 2π] of the spherical coordinate system (see Supplementary Note 1). The charged filaments, which repel each other, bend against the vesicle membrane and are assumed to be constrained to the membrane surface in our theoretical model, consistent with qualitative suggestions from MD simulations. The filaments could freely slip along the vesicle surface. Each filament fi (i = 1, 2) is characterized by its position vector \({{{{\bf{r}}}}}_{i}^{{{{\rm{f}}}}}(\varphi )={{{{\bf{r}}}}}^{{{{\rm{m}}}}}({\theta }_{i},\varphi )\), with a specified polar angle θi. The vesicle surface and filament geometries can then be derived from rm(θ, φ) and \({{{{\bf{r}}}}}_{i}^{{{{\rm{f}}}}}(\varphi )\) using classical differential geometry (Supplementary Note 1). Consequently, the total energy Etot is expressed as a function of undetermined coefficients \({C}_{lm}^{x,y,z}\) and minimized numerically via sequential quadratic programming. The fixed vesicle area A and filament length Li serve as equality constraints, with vesicle volume V included if a reduced volume is specified. Once values of \({C}_{lm}^{x,y,z}\) are obtained, the system morphology and corresponding energy components are determined.
MD simulations
In the coarse-grained MD simulations, the lipid vesicle membrane is represented by a one-particle-thick layer53,54,55, where each lipid molecule is modeled as a particle with translational and rotational degrees of freedom. The interaction between these lipid particles depends on their relative distances and orientations. For vesicles at Δp = 0, solvent is not introduced; for vesicles with a reduced volume v, solvent is included to control volume56. Filaments are modeled as chains of unit-charged particles connected by harmonic bonds and angles. The electrostatic interaction is computed using the Particle-Particle Particle-Mesh method57 with the interaction strength proportional to 1/εr. The discretization of charges, finite simulation box size, and periodic boundary conditions complicate the mapping of the interaction strength from MD simulations to the theoretical model58. Lennard-Jones potentials govern lipid, solvent, and filament interactions54. For elongated vesicle morphologies at Δp = 0, the simulation box size bs is adjusted to adequately accommodate the morphologies. All MD simulations are conducted with the Large-scale Atomic/Molecular Massively Parallel Simulator (LAMMPS)59 and visualized using OVITO60. For clarity, simulation boxes and solvent particles are not shown in the main text. More detailed descriptions can be found in Supplementary Note 2 and Figs. S1–S4.
Reporting summary
Further information on research design is available in the Nature Portfolio Reporting Summary linked to this article.
Data availability
Simulation data generated in this study have been deposited in the PKU NetDisk database under accession code https://disk.pku.edu.cn/link/AA4B4C4DFE38E34C05B6A5C8CF0564813B.
References
Bray, D. Cell Movements: From Molecules to Motility 2nd edn (Garland Science, New York, 2001).
Litschel, T. & Schwille, P. Protein reconstitution inside giant unilamellar vesicles. Annu. Rev. Biophys. 50, 525–548 (2021).
Lipowsky, R. (ed) Multiresponsive Behavior of Biomembranes and Giant Vesicles. Advances in Biomembranes and Lipid Self-Assembly, Vol. 30 (Academic Press, London, 2019).
Dimova, R. & Marques, C. (eds) The Giant Vesicle Book (CRC Press, Boca Raton, 2019).
Ramesh, S. & Kulkarni, Y. Statistical mechanics of active vesicles and the size distribution paradox. J. Mech. Phys. Solids 191, 105749 (2024).
Diagouraga, B. et al. Motor-driven marginal band coiling promotes cell shape change during platelet activation. J. Cell Biol. 204, 177–185 (2014).
Zhu, W. et al. Nanomechanical mechanism for lipid bilayer damage induced by carbon nanotubes confined in intracellular vesicles. Proc. Natl. Acad. Sci. USA 113, 12374–12379 (2016).
Miyazaki, M., Chiba, M., Eguchi, H., Ohki, T. & Ishiwata, S. Cell-sized spherical confinement induces the spontaneous formation of contractile actomyosin rings in vitro. Nat. Cell Biol. 17, 480–489 (2015).
Limozin, L. & Sackmann, E. Polymorphism of cross-linked actin networks in giant vesicles. Phys. Rev. Lett. 89, 168103 (2002).
Mulla, Y., Aufderhorst-Roberts, A. & Koenderink, G. H. Shaping up synthetic cells. Phys. Biol. 15, 041001 (2018).
Bashirzadeh, Y. & Liu, A. P. Encapsulation of the cytoskeleton: towards mimicking the mechanics of a cell. Soft Matter 15, 8425–8436 (2019).
Litschel, T. et al. Reconstitution of contractile actomyosin rings in vesicles. Nat. Commun. 12, 2254 (2021).
Baldauf, L., van Buren, L., Fanalista, F. & Koenderink, G. H. Actomyosin-driven division of a synthetic cell. ACS Synth. Biol. 11, 3120–3133 (2022).
Graham, K. et al. Liquid-like VASP condensates drive actin polymerization and dynamic bundling. Nat. Phys. 19, 574–585 (2023).
Sciortino, A. et al. Active membrane deformations of a minimal synthetic cell. Nat. Phys. 21, 799–807 (2025).
Takatori, S. C. & Sahu, A. Active contact forces drive nonequilibrium fluctuations in membrane vesicles. Phys. Rev. Lett. 124, 158102 (2020).
Abaurrea-Velasco, C., Auth, T. & Gompper, G. Vesicles with internal active filaments: self-organized propulsion controls shape, motility, and dynamical response. New J. Phys. 21, 123024 (2019).
Peterson, M. S. E., Baskaran, A. & Hagan, M. F. Vesicle shape transformations driven by confined active filaments. Nat. Commun. 12, 7247 (2021).
Iyer, P., Gompper, G. & Fedosov, D. A. Non-equilibrium shapes and dynamics of active vesicles. Soft Matter 18, 6868–6881 (2022).
Shi, X.-Q. & Ma, Y.-Q. Topological structure dynamics revealing collective evolution in active nematics. Nat. Commun. 4, 3013 (2013).
Shi, C. et al. Morphological transformations of vesicles with confined flexible filaments. Proc. Natl. Acad. Sci. USA 120, e2300380120 (2023).
Behera, A., Kumar, G. & Sain, A. Confined filaments in soft vesicles–the case of sickle red blood cells. Soft Matter 16, 421–427 (2020).
Zou, G., Yi, X., Zhu, W. & Gao, H. Packing of flexible nanofibers in vesicles. Extreme Mech. Lett. 19, 20–26 (2018).
Dobrynin, A. V. & Rubinstein, M. Theory of polyelectrolytes in solutions and at surfaces. Prog. Polym. Sci. 30, 1049–1118 (2005).
Maleki, M. & Fried, E. Stability of discoidal high-density lipoprotein particles. Soft Matter 9, 9991–9998 (2013).
Belyi, V. A. & Muthukumar, M. Electrostatic origin of the genome packing in viruses. Proc. Natl. Acad. Sci. USA 103, 17174–17178 (2006).
Purohit, P. K., Kondev, J. & Phillips, R. Mechanics of DNA packaging in viruses. Proc. Natl. Acad. Sci. USA 100, 3173–3178 (2003).
Helfrich, W. Elastic properties of lipid bilayers: theory and possible experiments. Z. Naturforsch. C 28, 693–703 (1973).
Doi, M. & Edwards, S.F. The Theory of Polymer Dynamics (Oxford Univ. Press, New York, 1986).
Hoffman, K. A. & Manning, R. S. An extended conjugate point theory with application to the stability of planar buckling of an elastic rod subject to a repulsive self-potential. SIAM J. Math. Anal. 41, 465–494 (2009).
Chaurasia, V., Chen, Y.-C. & Fried, E. Interacting charged elastic loops on a sphere. J. Mech. Phys. Solids 134, 103771 (2020).
Seifert, U., Berndl, K. & Lipowsky, R. Shape transformations of vesicles: phase diagram for spontaneous-curvature and bilayer-coupling models. Phys. Rev. A 44, 1182 (1991).
Alben, S. Packings of a charged line on a sphere. Phys. Rev. E 78, 066603 (2008).
Wang, M., Li, X. & Yi, X. Deformation, shape transformations, and stability of elastic rod loops within spherical confinement. J. Mech. Phys. Solids 191, 105771 (2024).
Blanchoin, L., Boujemaa-Paterski, R., Sykes, C. & Plastino, J. Actin dynamics, architecture, and mechanics in cell motility. Physiol. Rev. 94, 235–263 (2014).
McCullough, B. R., Blanchoin, L., Martiel, J.-L. & Enrique, M. Cofilin increases the bending flexibility of actin filaments: implications for severing and cell mechanics. J. Mol. Biol. 381, 550–558 (2008).
Goldmann, W. H. Binding of tropomyosin–troponin to actin increases filament bending stiffness. Biochem. Biophys. Res. Commun. 276, 1225–1228 (2000).
Bolognesi, G. et al. Sculpting and fusing biomimetic vesicle networks using optical tweezers. Nat. Commun. 9, 1882 (2018).
Li, Q., Li, S., Zhang, X., Xu, W. & Han, X. Programmed magnetic manipulation of vesicles into spatially coded prototissue architectures arrays. Nat. Commun. 11, 232 (2020).
Lipowsky, R. From membranes to membrane machines. in Statistical Mechanics of Biocomplexity, Vol. 527 (eds Reguera, D., Vilar, J. & Rubi, J.) (Springer, Berlin, Heidelberg, 1999).
Abdelmohsen, L. K. E. A. et al. Dynamic loading and unloading of proteins in polymeric stomatocytes: formation of an enzyme-loaded supramolecular nanomotor. ACS Nano 10, 2652–2660 (2016).
Muthukumar, M. Adsorption of a polyelectrolyte chain to a charged surface. J. Chem. Phys. 86, 7230–7235 (1987).
Bharti, B., Fameau, A.-L., Rubinstein, M. & Velev, O. D. Nanocapillarity-mediated magnetic assembly of nanoparticles into ultraflexible filaments and reconfigurable networks. Nat. Mater. 14, 1104–1109 (2015).
Sano, T. G. Reduced theory for hard magnetic rods with dipole–dipole interactions. J. Phys. A Math. Theor. 55, 104002 (2022).
Yam, C., He, Y., Zhang, D., Chiam, K.-H. & Oliferenko, S. Divergent strategies for controlling the nuclear membrane satisfy geometric constraints during nuclear division. Curr. Biol. 21, 1314–1319 (2011).
Dey, G. et al. Closed mitosis requires local disassembly of the nuclear envelope. Nature 585, 119–123 (2020).
Kantsler, V., Segre, E. & Steinberg, V. Vesicle dynamics in time-dependent elongation flow: Wrinkling instability. Phys. Rev. Lett. 99, 178102 (2007).
Kantsler, V., Segre, E. & Steinberg, V. Critical dynamics of vesicle stretching transition in elongational flow. Phys. Rev. Lett. 101, 048101 (2008).
Ganichkina, O. M. et al. Quantification and demonstration of the collective constriction-by-ratchet mechanism in the dynamin molecular motor. Proc. Natl. Acad. Sci. USA 118, e2101144118 (2021).
Meadowcroft, B. & Palaja, I. et al. Mechanochemical rules for shape-shifting filaments that remodel membranes. Phys. Rev. Lett. 129, 268101 (2022).
Khairy, K. & Howard, J. Minimum-energy vesicle and cell shapes calculated using spherical harmonics parameterization. Soft Matter 7, 2138–2143 (2011).
Zhang, C., Fang, Y., Shi, C., Yuan, H. & Yi, X. Stretching transition of vesicles with confined filament loops: Morphological evolution with filament distortion and reorientation. Giant 17, 100233 (2024).
Yuan, H., Huang, C., Li, J., Lykotrafitis, G. & Zhang, S. One-particle-thick, solvent-free, coarse-grained model for biological and biomimetic fluid membranes. Phys. Rev. E 82, 011905 (2010).
Fu, S.-P., Peng, Z., Yuan, H., Kfoury, R. & Young, Y.-N. Lennard-Jones type pair-potential method for coarse-grained lipid bilayer membrane simulations in LAMMPS. Comput. Phys. Commun. 210, 193–203 (2017).
Liu, Y., Zou, G. & Gao, H. Domain aggregation and associated pore growth in lipid membranes. ACS Nano 15, 604–613 (2021).
Ghosh, R., Satarifard, V., Grafmüller, A. & Lipowsky, R. Spherical nanovesicles transform into a multitude of nonspherical shapes. Nano Lett. 19, 7703–7711 (2019).
Eastwood, J. W., Hockney, R. W. & Lawrence, D. N. P3M3DP–The three-dimensional periodic particle-particle/particle-mesh program. Comput. Phys. Commun. 19, 215–261 (1980).
Yeh, I.-C. & Hummer, G. System-size dependence of diffusion coefficients and viscosities from molecular dynamics simulations with periodic boundary conditions. J. Phys. Chem. B 108, 15873–15879 (2004).
Plimpton, S. Fast parallel algorithms for short-range molecular dynamics. J. Comput. Phys. 117, 1–19 (1995).
Stukowski, A. Visualization and analysis of atomistic simulation data with OVITO–the Open Visualization Tool. Model. Simul. Mater. Sci. Eng. 18, 015012 (2009).
Acknowledgements
This work was supported by the National Natural Science Foundation of China, grant numbers 12272004 (X.Y.) and T2488101 (H.G.). We also gratefully acknowledge the High-Performance Computing Platform of Peking University for computational resources.
Author information
Authors and Affiliations
Contributions
X.Y. and H.G. designed and guided this work; C.Z., G.Z., Y.F., H.G., and X.Y. performed the modeling and simulations, analyzed the data, and wrote the paper.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks Ming Li and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhang, C., Zou, G., Fang, Y. et al. Interacting filaments drive vesicle morphogenesis. Nat Commun 17, 78 (2026). https://doi.org/10.1038/s41467-025-66750-4
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41467-025-66750-4
