
Abstract
Auditory-motor coupling, the entrainment of movement to an auditory stimulus, involves processes of temporal prediction and feedforward control. The cerebellum is central to these mechanisms, with deficits contributing to ataxia, characterized by incoordination and increased movement variability. Previous research investigated these mechanisms through perceptual or paced finger-tapping tasks. However, little is known about how these processes interact in complex motor tasks, such as walking, which require feedforward control and voluntary adaptability. Thus, the dynamic interplay between temporal prediction and feedforward control in persons with cerebellar ataxia (PwCA) during walking was assessed in three auditory-motor coupling paradigms (spontaneous, instructed and adaptive), involving walking to music and metronomes at different frequencies. The adaptive paradigm additionally incorporated real-time alignment algorithms. Sixteen PwCA (scale for the assessment and rating of ataxia 3.59 ± 2.92) and fourteen healthy controls (HCs) participated. Overall, patients showed spared temporal predictions assessed by synchronization accuracy. Yet reduced synchronization consistency and gait modulation was observed in PwCA as compared to HCs, consistent with deficits of feedforward control. The adaptive alignment algorithm may have compensated for feedforward impairments, thereby promoting enhanced synchronization and gait dynamics. This approach warrants further investigation and holds potential for integration into rehabilitation strategies for persons with mild ataxia.
Similar content being viewed by others


Introduction
Auditory-motor coupling is a process which involves the entrainment of a movement cycle (e.g., finger-taps or steps) to an auditory stimulus (e.g., metronome ticks, or beats in music). This encompasses a cascade of action-perception loops including (I) auditory perception, (II) the formation of internal models of temporal structure of the auditory stimuli (i.e. temporal prediction), and (III) the engagement of the motor system to interface with the induced temporal structures of the auditory stimuli1,2,3. These underlying processes rely on prediction, defined as a process that incorporates information from the past or present, to generate relevant information for coping with future states4. Within the coupling paradigm, two levels of predictions can be identified. The first is temporal prediction, which depends on perceptual and temporal abilities1,5. The second is associated with the feedforward control required to adjust the motor plan to the appropriate sensory information6 (i.e. to the induced temporal structures)5.
The cerebellum is known to play a crucial role in sensorimotor processing7. This is supported by neural and clinical evidence demonstrating the involvement of cerebro-cerebellar networks in predictive processing8,9 to explain functions such as perception10, sequential and temporal processing11,12, temporal pattern generation13,14, higher-order cognitive processes15,16, sensorimotor interaction17,18,19 motor adaptation, control and learning20,21,22 and locomotion23,24. Previously, predictive processes in patients with cerebellar impairments have been investigated using either perceptual temporal tasks (listening to auditory stimuli) or auditory-coupling tasks (paced finger-tapping). The results of these studies demonstrate altered temporal prediction abilities in cerebellar patients25 particularly when processing rhythms at a very fast tempo26. Evidence from behavioral studies (limited to spontaneous or paced finger-tapping) demonstrates greater movement variability in cerebellar patients compared to controls17,27,28,29.
While these studies provide valuable insights, they do not account for the dynamic interplay between temporal prediction and feedforward control to meet the demands of motor tasks requiring higher levels of control complexity. Walking exemplifies such a task; it inherently relies on feedforward control for regulation30 and it can be adapted through voluntary control31. It also is an activity of daily living, making it ecologically and functionally valid. This is particularly relevant for individuals with cerebellar ataxia, a disorder characterized by impaired interlimb coordination and increased movement variability due to cerebellar dysfunction32,33,34,35. Ataxia is highly disabling36 and difficult to manage with medication37. While physical rehabilitation is advocated for persons with cerebellar ataxia (PwCA) for improving overall functioning, its effects remain limited for coordination impairments and ataxia36,38,39. Given that temporal prediction and feedforward control are both integral to motor performance, understanding their interplay could provide crucial insights into the dysfunctions of coordination observed in cerebellar ataxia. Building on this, auditory-motor coupling paradigm offers a dual possibility: to investigate underlying functioning of these mechanisms and to potentially inform targeted rehabilitation strategies aimed at improving incoordination and movement control experienced by PwCA.
To address this knowledge gap, three experimental sessions consisting of auditory-motor coupling paradigms were designed which included walking as the motor task. Next, the paradigms where designed to include different complexities of temporal predictions and feedforward control, as follows: (1) investigation into the different temporal predictive processes by applying spontaneous as compared to instructed coupling, as it has been demonstrated that temporal predictive processes differ when coupling is instructed (i.e. explicitly instructed to synchronize), or spontaneous (i.e. not instructed to synchronize)40; (2) investigation into the effects of perceptual and motor loads on temporal processing and motor responses, using a paradigm which requires a deviation from an own intrinsic timer to adapt to a new, externally imposed temporal structure. This was achieved by applying different tempi, including own comfortable tempi, as well as at faster and slower tempi; and (3) investigation of prolonged coupling to examine the coupling interplay of temporal predictions and feedforward control over time. Furthermore, to investigate whether deficits in predictive control could be mitigated through technology-driven solutions, such as an adaptive beat-step alignment algorithm. The algorithm was designed to dynamically adjust rhythms in real time, with the goal of facilitating synchronization while maintaining the desired individualized tempo of walking. This approach also offers valuable insights for clinical rehabilitation.
In the experiments, synchronization accuracy and consistency were the primary outcome measures used to quantify temporal prediction and feedforward control. To elaborate, temporal prediction was assessed by synchronization accuracy, as the degree to which participants’ steps anticipated or lagged behind the beat3. Feedforward control was assessed using two proxies: motor alignment, represented by synchronization consistency (i.e. the consistency of alignment between the steps and the beat)3and motor behavior evaluated through spatiotemporal gait parameters3 and pattern of step-to-step fluctuations (i.e. gait dynamics)3,41.
Experimental session one investigated synchronization consistency while walking to music at comfortable, faster and slower tempi, without being instructed to synchronize, across groups. In the spontaneous coupling condition, we hypothesized to find the highest synchronization consistency to occur at comfortable walking tempi. In addition, we hypothesized to find differences in synchronization consistency between groups in both the spontaneous and instructed coupling conditions, due to evidence that damage to the cerebellum affects the predictive adaptation and thus updating of internal models25. Experimental session two investigated synchronization consistency and accuracy, along with changes in gait parameters and dynamics, while walking to both music and metronomes at comfortable, faster and slower tempi across groups, when participants were explicitly instructed to synchronize. Additionally, it examined how gait parameters and dynamics were affected. We hypothesized that patients would have better responses on synchronization and gait parameters at their own comfortable tempi, while gradually deteriorating as tempi becomes faster or slower, given the deficits in predictive feedforward control hindering the real-time adjustments of motor commands in cerebellar patients42. Experimental session three investigated synchronization consistency and accuracy when interacting with rhythms in music and metronomes during prolonged walking, as well as whether this could be enhanced by applying implicitly perceived adaptive beat-step alignment algorithms across groups. We hypothesized that the condition with adaptive alignment algorithm would result in the best response on synchronization and gait parameters over time in both groups, but more so in the patient group, as the external algorithm would compensate for the anticipated errors in feedforward control43.
Additionally, in experimental sessions two and three, we investigated the coupling process when entraining to two auditory stimuli: metronomes and music. The reason was to investigate the temporal prediction processes when entraining to a discrete auditory structure of unambiguous ticks with no rhythmic variability (such as found in metronomes), compared to the sinusoidal auditory structure of more complex rhythmic structure (such as found in music). In previous studies on both healthy and neurological populations, synchronization to metronomes has been shown to be more consistent compared to music44,45. On the other hand, participant’s gait dynamics when coupling (i.e., the variability of step durations over time46) reflected the auditory structure of the stimuli. To elaborate, walking in synchrony to metronomes led to a non-variable and rigid gait dynamics, while favourable gait dynamics were observed when walking in synchrony to music41. Thus, we hypothesized that, while metronomes would lead to better synchronization consistency, music would result in more favorable gait dynamics in both groups.
Results
Participants
A total of 16 PwCA and 15 healthy controls (HCs) were included into the case-control study. Figure 1 illustrates the experimental flow-chart of the participant flow in the three experiments of the overall case-control study.

Flow-chart of the participant flow in the three experimental sessions.
Groups did not statistically differ in age or gender. Details of the cerebellar diagnosis is outlined in Table 1 per study participant. As seen in Table 2, the cerebellar group presents with ataxia, and is significantly more impaired than HCs in terms of dynamic balance, functional mobility as measured by the dynamic gait index and time up and go tests. Walking aids were not used by any participant. Statistical differences between groups were found on four spatiotemporal outcomes: the mean of double support, and the co-efficient of variation of speed, step duration and toe off angle. No other main or interactions effects were found for the spatiotemporal parameters across the three baseline walking conditions across the three experimental sessions. Table 3 provides a compressive summary of the baseline spatiotemporal parameters and the statistical results.
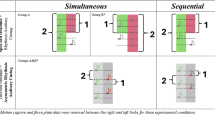
Figure 2 provides a graphical summary of the three experimental sessions. In each experimental session, prior to commencing with the conditions, participants were asked to walk three minutes in silence at their comfortable tempo to quantify baseline cadence for each session. The corresponding experimental conditions were then individualized relative to each participant’s comfortable tempo.

Illustration summarizing the three experimental sessions. The tempi ranges using in experimental sessions one and two were − 12%, −8%, −4%, 0%, 4%, 8% and 12% of individual preferred walking cadence. The algorithms used in experimental session three were an adaptive beat-step alignment algorithm and a non-adaptive beat-step alignment algorithm.
A summary of the primary and secondary outcome measures for each experimental session is provided in Table 4. Details on how these outcomes were computed can be found in the methods section. The results of each experimental sessions are described below.
Experimental session one: spontaneous auditory-motor coupling
Participants walked to music at seven different tempi (−12%, −8%, −4%, 0%, + 4%, + 8%, + 12% of preferred walking cadence), each lasting three minutes. To assess the effect of instruction, these spontaneous music conditions were contrasted with the instructed music conditions from experimental session two.
Figure 3 provides a visual illustration of the primary outcome measure plotted across Tempi and Session.

Synchronization consistency results of experimental session one plotted across tempi, between session (walking to music condition during the spontaneous and instructed sessions). Mean standard errors are shown.
Primary outcome measure
Resultant Vector Length. Significant main and interaction effects were found for Session and Tempi, and Session*Tempi (F(6, 345.9) = 2.66, p = 0.0150). The post-hoc tests indicated a significantly lower consistent synchronization at all seven tempi when participants were not instructed to synchronize (spontaneous coupling) compared to when they were instructed to synchronize (instructed coupling).
Experimental session two. Instructed auditory-motor coupling
Participants were explicitly instructed to synchronize, and walked to music and metronomes at seven different tempi, each lasting three minutes.
Table 5 provides a summary of the observations of each outcome measure as mean and standard deviation, and the F and p statistics. Figure 4 provides a visual illustration of the primary outcome measures and secondary outcome alpha plotted across Group, Stimuli and Tempi.

Experimental session two, results plotted across tempi (−12%, −8%, −4%, 0%, 4%, 8%, 12%) stimuli (metronome, music) and groups (cerebellar, controls). A: resultant vector length, B: relative phase angle, C: alpha. Mean standard errors are shown.
Primary outcome measures
Resultant Vector Length. Significant main effects were found for (a) Tempi (p < 0.0001), indicating synchronization was more consistent for − 12, −8 and − 4% as compared to the 12% (t = 3.56, p = 0.0075; t = 5.89, p < 0.0001; t = 5.83, p < 0.0001), and the − 8%, −4% as compared to the 8% (t = 3.32, p = 0.0170; t = 3.27, p < 0.0202), and the 0%, 4% compared to 12% (t = 4.96, p < 0.0001, t = 3.17, p = 0.0271); (b) Group (p = 0.0155) and (c) Stimuli (p < 0.0001), indicating that HCs synchronized more consistently than the patient group, and that synchronization was more consistent with metronomes compared to music. A significant interaction effect of Group*Stimuli (p = 0.0024)) indicated that HCs synchronized more consistency to metronomes compared to the cerebellar group (t=−3.39, p = 0.0060) and that only HCs, synchronized more consistency with metronomes compared to music (t = 6.07, p < 0.0001) while this effect was not present in the cerebellar group.
Relative phase angle. A significant main effect was found for Tempi (p < 0.0001) indicating a negative mean asynchrony at the lower tempi, and positive mean asynchrony at the higher tempi.
Secondary outcome measures
Alpha. Significant main effects were found for: (a) Tempi (p < 0.0001) with highest persistence found at the + 12% tempi, (b) Group (p = 0.0434) with higher persistence for the cerebellar group, (c) Stimuli (p < 0.0001) with higher persistence for music. Significant interaction effects were found for Group*Stimuli (p < 0.0001), indicating that HCs had a lower persistent gait pattern (a) when walking to metronomes compared to cerebellar patients (t = 3.84, p = 0.0008) and (b) when walking to the music compared to metronomes (t=−9.36, p < 0.0001).
The spatiotemporal parameter outcomes are expressed as percentage change relative to walking to the baseline. Main and interaction effects are described below:
Mean: Cadence was increased when walking to the higher tempi, and decreased for the lower tempi (p < 0.0001). This observation was significantly more prominent with metronomes compared to music (p = 0.0141). Speed was decreased to follow the lower tempi (p < 0.0001), yet at the highest tempi, only HCs increased their speed, and more so when walking to metronomes compared to music (t = 2.81, p = 0.0271). Step duration was increased (slower steps) when walking to the negative tempi, and decreased (faster steps) when walking to the positive tempi (p < 0.0001). In addition, specific effects of Tempi were as follows: At −4% of preferred walking cadence, participants increased their double support time more when walking to metronomes compared to music (t = 3.38, p = 0.0499). At + 12% of preferred walking cadence, participants took slower steps when walking to metronomes compared to music (p = 0.0003). At −12% of preferred walking cadence, participants decreased stride length significantly more compared to + 12% (t=−2.97, p = 0.0500).
Variability: The CV differed across stimuli for cadence (t=−4.37, p < 0.0001), step duration (t=−6.14, p < 0.0001), double support (t=−4.91, p < 0.0001) and stride length (t=−3.75, p = 0.0012) only in HCs when walking to music compared to metronomes. A significant effect of Tempi was found for the CV of cadence (p < 0.0001) and step duration (p < 0.0001) indicating highest CV at both the lowest (−12%) and highest tempi (+ 12%). No significant main or interactions effects were found for the CV of speed.
Supplementary Fig. 1 provides visual illustrations of the spatiotemporal gait parameters (mean and co-efficient of variation) plotted across Group, Stimuli and Tempi.
Experimental session three: adaptive auditory-motor coupling
Participants were explicitly instructed to synchronize, and walked in silence, to music and metronomes (with and without adaptive algorithms), each lasting eight minutes.
Table 6 provide a summary of the observations of each outcome measure as mean and standard deviation (Table 6, and the F and p statistics (Table 7. Figure 5 provides visual illustrations of the primary outcome measures and secondary outcome alpha plotted across Group, Stimuli and Algorithm.

Experimental session three, results plotted across algorithm (adaptive, non-adaptive) stimuli (metronome, music) and groups (cerebellar, controls). A: resultant vector length, B: relative phase angle, C: alpha. Mean standard errors are shown.
Primary outcome measures
Resultant Vector Length. Significant main effects were found for Algorithm (t = 8.80, p < 0.0001), indicating that the adaptive alignment algorithm was able to maintain synchronization consistency in both groups, resulting in higher RVL in the adaptive as compared to the non-adaptive condition. Significant main effects were found for Group (p = 0.0450) and Stimuli (p < 0.0001), indicating higher synchronization consistency for HCs when walking to metronomes. A significant Group*Stimuli interaction effect was found (p = 0.0009), the post-hoc test indicated (a) a more consistent synchronization for the HCs compared to the PwCA in the metronome condition (t=−3.27, p = 0.0064) and (b) difference of stimuli for HCs only, achieving a higher synchronization consistency with metronomes compared to with music (t = 5.71, p < 0.0001). Synchronization consistency did not significantly differ over time between groups, stimuli and algorithms.
Relative Phase angle. A significant main effect was found for Stimuli, indicating a smaller negative asynchrony for the music condition, as compared to the larger negative asynchrony for the metronome condition (t=−3.71, p = 0.0002).
Secondary outcome measures
Alpha. Significant main effects were found for Stimuli (p < 0.0001) and Algorithm (p < 0.0001), and two significant interactions were found for Group*Stimuli (p = 0.0210) and Algorithm*Stimuli (p = 0.0041).
The post-hoc tests of the Group*Stimuli interaction indicated that (a) in all participants, gait was more persistent when walking to music compared to metronomes in all participants (t=−4.85, p < 0.0001); and (b) only in healthy controls, gait was more persistent when walking in the silent condition compared to walking to the metronome condition (t=−5.57, p < 0.0001).
The post-hoc tests of the Algorithm*Stimuli interaction indicated that (a) gait was more persistent when walking to the adaptive compared to the non-adaptive metronome condition (t = 4.39, p = 0.0004); (b) gait was more persistent in the non-adaptive music condition compared to the non-adaptive metronome condition (t=−4.15, p = 0.0009); and (c) gait was more persistent when walking to the adaptive music condition compared to walking in the silent condition (t=−6.27, p < 0.0001).
The spatiotemporal parameter outcomes are expressed as percentage change relative to walking to the silent condition. Main and interaction effects are described below:
Mean: Participants decreased their cadence (p = 0.0359) and step duration (p = 0.0291), and increased their stride length (p = 0.0161), in the last two minutes of the walking to auditory stimuli compared to the first two minutes. Participants decreased speed more when walking to music compared to metronomes (t = 5.58, p < 0.0001). A decrease in cadence (t = 4.12, p = 0.0003) and an increase in step duration (t=−4.20, p = 0.0002) was seen in the adaptive music condition compared to the adaptive metronome condition. A decrease of speed was seen during the adaptive conditions regardless of stimuli (t=−2.53, 0.0118). A higher decrease in cadence (t=−4.42, p = < 0.0001) and a lower step duration (t = 3.94, p = 0.0006) was seen for the non-adaptive music compared to the adaptive music. Stride length decreased more when walking to music compared to metronomes in the non-adaptive condition (t = 5.35, p < 0.0001). No further main or interaction effects were found for Group, nor on the parameter of mean double support.
Variability: Two significant main effects and one significant interaction effect were found as follows.
A significant main effect of Stimuli was found stride length (p < 0.0001), indicating a higher increase of CV of stride length when walking to music compared to metronomes (t=−5.24, p < 0.0001). A significant main effect of Time was found for double support (p = 0.0391), indicating a higher CV of double support when walking to the 5th and 6th minute as compared to walking to the 3rd and 4th minutes (t=−2.62, p = 0.0458).
Significant Group*Stimuli interactions were found for cadence (p = 0.0002), speed (p = 0.0468), step duration (p = 0.0023), and double support (p = 0.0391). The post-hoc tests indicated: (a) in cerebellar patients compared to healthy controls when walking to the music condition, a significantly higher CV of cadence (t=−3.04, p = 0.0134) and step duration (t=−2.73, p = 0.0338) was observed; and (b) In HCs, when walking to the music condition compared to when walking to the metronome condition, a higher CV of cadence (t=−6.42, p < 0.0001), CV of speed (t=−4.62, p < 0.0001), CV of step duration (t=−5.20, p < 0.0001) and CV of double support (t=−5.77, p = < 0.0001) was observed.
Supplementary Fig. 2 provides visual illustrations of the spatiotemporal gait parameters (mean and co-efficient of variation) plotted across Group, Stimuli, Algorithm and Time.
Discussion
This body of work provides empirical evidence on auditory-motor coupling paradigms during walking in patients with cerebellar ataxia compared to HCs. Experimental session one investigated spontaneous coupling at preferred walking cadence and tempi deviating from preferred walking cadence. Experimental session two investigated instructed coupling to music and metronomes at preferred walking cadence and tempi deviating from preferred walking cadence. Experimental session three investigated adaptive and non-adaptive prolonged coupling at preferred walking cadence to music and metronomes.
Spontaneous coupling
An inverse U-Shape was observed for the response of synchronization consistency for all participants in the spontaneous coupling condition only, with best synchronization occurring at the 0% of preferred walking cadence tempi. This is consistent with our hypothesis and evidence that persons are able to spontaneously synchronize within the confounds of their intrinsic comfortable walking tempo, often termed the entrainment basin47,48. We observed a similar response from cerebellar patients to that of HCs, suggesting that spontaneous synchronization is related to passive attentional control at ranges within entrainment basin40 and likely not specific to the cerebellum. However, synchronization consistency was significantly lower during spontaneous coupling compared to instructed coupling, and more so at tempi deviating from the preferred walking cadence in both groups. This is an indication that coupling to tempi that deviates from own preferred tempi requires active attentional control40 for updating the intrinsic timer with the imposed temporal structures, thereafter providing motor responses to reduce prediction errors in order to achieve alignment3,49.
Instructed coupling
In the domain of motor control, it has been well established that the cerebellum, throughout it cerebello-cortical projections support feedforward control, i.e. the process by which motor plans are updated before execution based on predictions6,8,9,51. This mechanism allows for smooth and accurate movements, and has been shown to be impaired in individuals with cerebellar damage52,53. Specifically within auditory–motor coupling paradigms, feedforward control allows the updating of the motor plan with the induced temporal structures5. In the present study, we assessed feedforward control by synchronization consistency (i.e. the variability in movement alignment with the beat) and gait parameters (i.e. response of the motor behavior). As hypothesized, synchronization consistency was significantly lower in the cerebellar group compared to healthy controls, and spatiotemporal gait showed reduced in the cerebellar group compared to healthy controls. Consistent with theoretical accounts and previous empirical evidence6,8,9,51,52,53 our findings support the view that feedforward control is compromised in cerebellar impairment.
Yet, contrary to our hypothesis, temporal prediction was intact in the cerebellar group, as no group differences were found for synchronization accuracy as observed by the relative phase angle. To elaborate, both groups had a typical negative mean asynchrony during coupling to the slow tempi indicating anticipation to the beat, and a positive mean asynchrony at the fast tempi indicating a response of lagging behind the beat, and thus a tendency to follow it1. While anticipatory behavior is consistent with literature (in both finger-tapping1,27 and walking studies54), the shift towards following the beat at the positive tempi is less well established. Rather, studies tend to show a reduction in anticipation at higher tempi, rather than positive asynchronies1,27,54.
An explanation for the latter could be that to synchronize with faster tempi, gait needs to be adjusted in ways that may not permit continued anticipatory timing. As a result, they may fall behind the beat and follow it. Participant’s gait patterns did follow such a trend, where participants decreased their cadence and step duration (i.e. took less and slower steps) to follow the slow tempi, and vice versa for the fast tempi.
In addition, the + 12% tempi appears to be the condition which mostly compromised feedforward control55. Only at this tempi, we observed a significantly lower synchronization consistency in all participants. It is noteworthy that the different tempi were presented in a random order, thereby eliminating any effects of gradual tempo changes. In addition, the observed effects occurred only at one extreme (+ 12%), and not the other (e.g. the − 12%). Therefore, this result is unlikely to be a consequence of Weber’s law56,57. When examining the motor response at the + 12% tempi, three significant findings emerged. First, gait dynamics was highly persistent across all participants, indicating active coupling and step adaptations. Second, all participants showed the highest variability in cadence and step duration (temporal gait parameter). Third, only HCs increased their speed (spatial gait parameter), while cerebellar patients decreased their gait speed at higher tempi. These results suggest that the + 12% tempi imposed the greatest demand on predictive processing and the corresponding motor response. However, we argue that, although synchronization consistency at + 12% tempi was compromised in both groups, the underlying reasons for this compromise differ between participants. To elaborate, for HCs, the compromise in synchronization consistency at the + 12% tempi was not due to a failure of predictive computation, but rather a result of task constraints. Specifically, although HCs used were following the beat at the faster tempi, they could still provide a motor command to this action. However, this motor command was limited to walking due to the task instructions. We hypothesize, that if participants were allowed to switch from walking to jogging, they would have been able to match their steps with the demands of the temporal predictions. Thus, while their system required a different motor state to meet the task demand (i.e. maintain synchronization consistency), they were unable to do so because the task only permitted walking. For the patient group, we hypothesize that the cerebellum was challenged at + 12% tempi on two fronts: first, updating its internal model rapidly to match the temporal structure of the stimuli, and second in updating the motor plans with that of the temporal predictions to meet task requirements. However, the system continued to require maintenance of stability, and therefore patients decreased their gait speed as compensatory mechanism to ensure stability during the task performance.
Prolonged and adaptive coupling
In previous literature in both HC48 and neurological populations45 RVL values of ≥ 0.75 have been used to indicate adequate synchronization. This threshold was empirically derived from a a dataset by identifying a statistical cutoff that separates phase-coherent from phase-incoherent gait patterns48. Based on this threshold, on average, HCs achieved adequate synchronization (RVL 0.79 ± 0.23) when walking eight minutes to the non-adaptive conditions, while the cerebellar patients did not (RVL 0.66 ± 0.30). Consistent with our hypothesis, the results indicated that the adaptive alignment algorithm implicitly compensated for these deficits, enabling patients to achieve adequate synchronization consistency (RVL 0.81 ± 0.20). Regarding performance over time, synchronization consistency remained stable across eight minutes, while there was a decrease in cadence and step duration in the final two minutes of the walking.
The gait pattern of participants also varied across conditions: during the non-adaptive conditions, they decreased their step length, whereas during adaptive conditions, they reduced step time and cadence. However, the variability of spatiotemporal parameters did not differ across conditions. Upon inspecting gait dynamics, we observed that walking with adaptive alignment algorithms increased the gait persistence, particularly with metronomes (i.e. resulting in a better gait dynamics). Specifically, in HCs only, the low and anti-persistent gait pattern found when walking to non-adaptive metronomes (which is consistent with previous literature, and reflects the high synchronization consistency41) shifted to a more persistent gait pattern when walking to adaptive metronomes. This increase in gait persistence has been attributed to the locomotor system’s ability to adapt under imposed constraints46,58. Our results confirm that the more persistent gait pattern observed in the adaptive condition in both groups results from the bidirectional interaction between the internal timer and the stimuli, with the adaptive alignment algorithm acting as a controller and facilitator of this interaction, unlike the unidirectional interaction seen in the non-adaptive conditions. It is noteworthy that in both groups, synchronization with the adaptive conditions was not achieved passively, as evidenced by the synchronization accuracy responses in all participants. This is an indication that participants were engaged with temporal prediction during both adaptive and non-adaptive conditions.
A final observation on gait dynamics during prolonged walking is that, in all participants, walking to adaptive music resulted in more persistent gait dynamics compared to walking in silence. This suggests that, despite evidence of impaired gait adaptations our sample was still able to interact with musical structures and modify their gait dynamics. These results are consistent with evidence suggesting that adaptive locomotor behavior learned through feedback mechanisms may be preserved even after cerebellar damage51.
Music and metronomes
A consistent finding across the experiments is a significant Group*Stimuli interaction, indicating that only HCs synchronize with metronomes with higher consistency than with music (RVL mean: instructed coupling, metronome:0.86, music:0.67; non-adaptive coupling, metronome:0.88, music:0.73). In contrast, patients showed similar synchronization with both stimuli (RVL mean: instructed coupling, metronome 0.60, music 0.54; non-adaptive coupling, metronome 0.69 music 0.63). While this observation (i.e. higher consistency to synchronize to metronomes than to music) in HCs aligns with existing literature on walking, the lack of differentiation observed in the cerebellar group contrasts with findings in controls and other neurological populations44,45. Processing of irregular auditory rhythms have been associated with increased activity in the cerebellum59. However in our study, both metronome and music stimuli contained regular rhythmic meters. Furthermore, previous research has shown that cerebellar involvement is less critical when timing is emergent60. For instance, patients with cerebellar deficits exhibit minimal impairments in tasks requiring continuous movements, like drawing circles at a constant rate, compared to tasks involving periodic movements with interruptions, such as finger-tapping61. However, in our experiments, the type of movement (i.e. walking) remained consistent across stimuli. While walking involves discrete events (e.g., alternating steps) participants engaged in continuous, uninterrupted walking from the start to the end of each trial. In this sense, walking contains discrete timing elements embedded within a continuous motor act. Thus, while event-based timing may be involved in producing each individual step, emergent timing mechanisms likely contribute to the overall regulation of continuous gait. Moreover, the task required participants to synchronize their steps to the beats of the music or metronome, both of which consisted of regular, discrete auditory events. Despite the continuous nature of the movement, the demands of inducing the discrete structure of the auditory beats over time may be reliant on event-based timing mechanisms. Given the cerebellum’s role in event-based timing, the lack of differentiation in synchronization performance across stimulus types observed in cerebellar patients may reflect a general impairment in this timing system, leading the reduced performance regardless of stimulus complexity. However, in our previous study using auditory-motor synchronization paradigms with finger-tapping, we demonstrated expected differences in synchronization consistency across stimuli for both cerebellar patients and HC27. This discrepancy may be explained by the greater motor complexity of walking compared to tapping, as walking requires continuous postural control and bilateral coordination. These demands may have placed a greater strain on an already compromised event-based timing system.
The following is a second explanation to account for the results of similar consistency between stimuli for patients only. Patients engaged in temporal prediction as seen by the relative phase angle. This is an indication that temporal predictions were accurately estimated for both stimuli. The differentiation was apparent in the motor output, both in synchronization consistency and gait dynamics. HCs but not cerebellar patients exhibited a highly anti-persistent gait dynamics when walking to metronomes, consistent with previous literature41. Anti-persistent gait dynamics have been attributed to the clear-cut attention to errors in step-to-beat alignment which are quickly corrected to maintain alignment62. It can be argued that patients did not display similar gait dynamics to those of HCs when walking to metronomes because they were unable to incorporate the perceived errors in the adjustment required for the motor plan of the next step.
Methodological considerations and study limitations
A major limitation of the current study is the heterogeneity in diagnosis and etiology among participants with cerebellar dysfunctions, which may involve distinct patterns of cerebellar involvement and reflect different underlying pathophysiological mechanisms. While such heterogeneity does reflect a common reality within this population39 and understanding the contribution of specific pathological mechanisms is of clear interest and value, this lies outside the scope of the current study. To meaningfully address the influence of distinct pathophysiological mechanisms on cerebellar impairment, larger sample sizes — ideally obtained through multicenter collaborations — would be required to enable stratified subgroup analyses. In our sample, even among the more represented subgroups, such as those with cerebellar stroke, variability persists in the form of lesion location. As a result, subgroup analysis is not feasible within the current cohort. Instead, we aimed to characterize participants based on clinical functional outcomes to allow meaningful comparison at the motor behavioral level. All participants in the cerebellar group demonstrated comparable profiles in terms of dynamic balance, preserved lower extremity strength, and absence of spasticity. Therefore, despite differences in etiology, we interpret the experimental results as reflective of coordination impairments. Noteworthy, that this study included participants with mild ataxia, and as such, caution is advised when generalizing the findings to moderate to severe ataxia.
Metronomes were not included in experimental session one to avoid introducing biases when testing spontaneous synchronization. Instead, music was used as the stimulus, following established protocols for assessing spontaneous synchronization40,47. Although music selection varied across participants, it was standardized using a curated dataset used in previous studies40,44,45 with annotated beats, 4/4 rhythms and categorized by genre63 while the genre selection was kept consistent within and between sessions per participant.
Clinical implications
Instructed coupling paradigms with varying tempi and walking durations could serve as a valuable outcome measure for assessing auditory-motor abilities in cerebellar ataxia. Synchronization consistency and accuracy, as well as instrumental gait analysis offer unique clinical insights and information that complements existing functional tests, potentially detecting impairments even in those with mild ataxia. This approach may hold a significant clinical value.
Based on our results for patients with mild ataxia, we recommend the personalization of the paradigm components: (a) to challenge and train predictive temporal processing, it is important to use stimuli with appropriate rhythmic complexity (b) for adaptation of motor commands and execution, it is recommended to individualize training tempi based on the preferred walking cadence and incorporating either higher or lower tempi, either gradually or alternating between thresholds. Incorporating technology-supported adaptive alignment algorithms (e.g. in personalized biofeedback systems) into clinical setting may become feasible in the near future, given the rapid advancements in engineering and artificial intelligence.
Future directions
Auditory-motor synchronization paradigms (potentially combined with technology supported adaptive algorithms) can be embedded into task-oriented rehabilitation approaches, such as walking. While the current study does not provide direct evidence of neural mechanisms, theoretical accounts suggest that this type of training could target two key mechanisms: first, activating networks specific to walking, including central pattern generators (spinal inter-neuronal network), as well as cortical and subcortical networks23; second, engaging the cerebro-cerebellar predictive networks involved in perceptual and temporal processing, motor planning and execution. Notably, this hypothesis requires further empirical validation. Overall, to demonstrate the effectiveness of the above-mentioned interactions on gait coordination and ataxia, randomized clinical intervention studies are warranted.
Conclusion
The performance of cerebellar ataxia patients across the three auditory-motor coupling paradigms during walking provides empirical evidence supporting theoretical accounts of predictive control deficits in this population. The findings suggest pronounced feedforward control deficits in PwCA, impairing their ability to adjust motor plans, rather than their ability to anticipate temporal information. Results also suggest that personalized adjustments to perceptual and motor thresholds supplemented by technology-assisted solutions may offer a means to compensate for feedforward deficits. This approach warrants further investigation and holds potential for integration into rehabilitation strategies for persons with mild ataxia.
Methods
Participants
This case-control study was approved by the Medical Ethical Committee of Hasselt University and the local ethical committee of C.H.U. Charleroi and Erasme Hospital in Brussels (B1152021000003), the National MS Center Melsbroek and Noorderhart rehabilitation and MS center Pelt (B1152020000011). The study was registered in the European clinical trial registry (NCT04887753, NCT04639401). A written informed consent was obtained from all participants. All methods were carried out in accordance with relevant guidelines and regulations.
Persons with cerebellar impairment and age and gender matched HCs were recruited from the above mentioned hospitals and rehabilitation centers. Additionally, HCs were recruited through social media advertisements. The following inclusion criteria were used for cerebellar impaired persons: presence of cerebellar impairment diagnosed by neurologist evidenced through MRI imaging (presence of a lesion and/or degeneration), or a minimum score of 1 on the Scale of Assessment and Rating of Ataxia64ability to walk for three minutes without rest. Participants were excluded when in the presence of: cognitive impairment impeding understating instructions, uncorrected hearing impairment, impaired rhythm perception (as assessed by the rhythm subscale of the Montreal Battery of Evaluation of Amusia65) and pregnancy. Eligible participants were invited to participate in two sessions: a descriptive assessment session and the experimental sessions. All sessions were conducted by the same assessor, who was not blinded to the patient group and controls.
Descriptive assessment
General demographic and disease information, the subscale of rhythm of the Montreal Battery of Evaluation of Amusia65and the following motor tests were collected: The Modified Ashworth Scale (MAS)66 to assess the muscle tone, the Motricity Index (MI)67 to assess the muscle strength, the Scale for Assessment and Rating of Ataxia (SARA), to evaluate the presence of ataxia64the 6-Minute Walking Test (6MWT) to evaluate walking capacity68the Dynamic Gait Index69 to evaluate dynamic balance, the Timed Up and Go test to functional mobility70. The following patient reported outcomes were collected: The Modified Fatigue Impact Scale71 to assess the impact of fatigue on motor, cognitive and psychosocial functioning, and the Hospital Anxiety and Depression Scale72 to detect the presence of depression or anxiety.
Experimental paradigms
Participants were invited to participate in three experimental sessions held one week apart. In each session, prior to commencing with the conditions, participants were asked to walk three minutes in silence at their comfortable tempo to quantify baseline cadence for each session. All walking trials were conducted in a quiet room with an 8 by 10 m square walking pathway.
Experimental session one: spontaneous auditory-motor coupling
Participants were asked to walk to seven musical stimuli for three minutes each. This session excluded metronomes, as their distinct beats prevent investigation of spontaneous coupling. The stimuli were differentiated by tempi, which were at −12%, −8%, −4%, 0%, 4%, 8% and 12% of their individual preferred walking cadence. Participants were told to simply walk, while listening to the music, without any instruction to synchronize. Each tempo entailed walking for five seconds in silence, followed by three minutes with the auditory stimuli, with a sufficient five minutes sitting rest period in between.
Experimental session two: instructed auditory-motor coupling
This experimental session was similar to experimental session one, with two differences (a) participants walked to two blocks of auditory stimuli, once to metronomes and once to music at the seven different tempi, (b) participants were familiarized and instructed to synchronize their steps to the beats of the auditory stimuli. As in previous studies44,45the song “Sanctum” by the artist “Shades of the Abyss” and an online metronome was used to familiarize and instruct participants on synchronizing. The song ‘Sanctum’ was only used for familiarization, and was not included in the experimental trails.
Experimental session three. adaptive auditory-motor coupling
Participants walked to five trials for eight minutes each: in silence, and with music and metronomes; with an adaptive alignment algorithm (adaptive condition) and without an adaptive alignment algorithm (non-adaptive condition). As in the previous session, they were instructed to synchronize their steps to the beats, and the tempo of the stimuli was individualized to their preferred walking cadence. However, participants were not informed about the presence of two different alignment algorithms. The non-adaptive condition was similar to the session above: participants had to synchronize to the auditory stimuli. While during the adaptive condition, stimuli tempo was matched continuously to the average walking cadence every ten seconds at a relative phase of −30°, ensuring that the stimulus was perceived as perfectly in sync. When a deviation from the target tempo was detected, the algorithm continued to sync but additionally applied a small phase offset, causing the participant to perceive the beats as slightly before or after their own footfall. Thereafter, this allowed the participant to adjust their cadence towards the target cadence based on their preferred walking cadence. The choice for the relative phase of −30° was based on negative mean asynchrony, a phenomenon where individuals synchronize movements slightly ahead of an auditory beat due to predictive timing mechanisms observed during finger-tapping1 and walking45,73 synchronization tasks. Thus, it was leveraged in our algorithm, which has been successfully tested and shown to be feasible in HCs74.
Randomization. In experimental session one, the tempi were randomized. In experimental session two, the auditory blocks were randomized, as well as the different tempi administered within each block. In experimental session three, the order of the five trials were randomized. All randomizations were conducted using a computer-generated algorithm.
Equipment
Delivering the auditory stimuli occurs by means of an interactive music player called the D-jogger75 consisting of headphones (DefenderShield® airtube earbuds), two sensors strapped to the ankles (NGIMU, x-io technologies limited) and a laptop (Dell Latitude laptop, Core i5-1145, Windows 10 Pro, ASIO low-latency soundcard) containing the custom made software. An existing music database was used as in previous studies40,44,45. In addition, D-jogger logged auditory and step information for computing gait-music synchronization and gait dynamics outcome measures.
Measuring gait: Participants were equipped with two portable APDM sensors strapped on the ankles (OPAL, USA, https://www.apdm.com/wearable-sensors/) to measure spatio-temporal gait parameters as in previous research40,44,45.
Outcome measures
Primary outcome measures
Resultant Vector Length (RVL). This expresses the stability of the relative phase angles over time. A unimodal distribution implies a high resultant vector length, whereas uniform and bipolar distributions result in a low resultant vector length. The measure ranges from 0 to 1, where 1 indicates high synchronization consistency over time at a given relative phase angle.
Relative phase angle (rPA). The rPA is a measure expressed in degrees and measures the timing of the footfall relative to the beat. This can be either negative (i.e. corresponding to negative mean asynchrony1with the footfall occurring before the beat), or positive (with the footfall occurring after the beat). To ensure that the computed rPA reflects meaningful synchronization, we tested whether the distribution of phase angles within each trial was uniform using the Rayleigh test76. A uniform distribution suggests that no consistent phase relationship was maintained throughout the trial—i.e., no true synchronization with the beat—making the resulting rPA non-representative of actual synchronization accuracy. Therefore, trials that failed to show non-uniformity (Rayleigh test p > 0.05) were excluded from analysis. After applying this criterion, 380 out of 420 trials were retained for analysis in experimental session two (28 trials from patients and 12 from controls were excluded). In experimental session three, 103 out of 105 trials were retained, with 2 trials excluded (both from the patient group).
Both measures were processed with the CircStats toolbox (Berens, 2009). For details of these metrics and formula for calculations, please see previous publications32.
Secondary outcome measures
Gait dynamics:
Alpha was computed as the metric to quantify the anti-persistence of the gait pattern in terms of gait dynamics77. It is delineated by a numerical value within the range of 0 to 1. A value below 0.5 signifies more variability in the inter-step-intervals over time. While values > 0.5 indicates low variability in the consecutive inter-step-intervals over time and a persistent and predictable gait pattern associated with healthy gait46. Supplementary Material 1 provides details on how alpha was computed using detrended fluctuation analysis77.
Spatiotemporal gait parameters:
The mean and coefficient of variation (CV) of cadence (steps/min), gait speed (m/s) and stride length (m), double support (%), step duration (ms) were computed from the baseline conditions and each experimental trials. For each variable (mean and CV), a percentage change from the baseline was computed using the following formula.
percentage change = (observationTrial - observationBaseline)/observationBaseline))*100.
Statistical analysis
The descriptive data were tested for normality using the Shapiro-Wilk test, and subsequently, analyzed using an unpaired t-test (if normally distributed), or by Wilcoxon Two-Sample test (if non-normally distributed). Mixed model analysis of variance (ANOVA) was utilized, as outlined below. To assess differences of baseline gait parameters between groups across the experimental sessions, a model was built per spatiotemporal parameters (mean and co-efficient of variation) with factors of Group (HC vs. PwCA) and Session (experimental sessions one, two, three). To assess the experimental results, models were built per primary and secondary outcome measure with the following factors: Experimental session one, with Group (HC vs. PwCA) and Tempi (−12%,−8%,−4%,0%,4%,8%,12%) and Session (spontaneous music conditions vs. instructed music conditions). Experimental session two, the model above was used, but Stimuli (music vs. metronomes) was replaced with Session. Experimental session three, with Group (HC vs. PwCA), Stimuli (music vs. metronomes), Algorithm (adaptive vs. non-adaptive) and Time (minutes 1–2, minutes 3–4, minutes 5–6, minutes 6–8). To quantify gait dynamics, alpha was computed using detrended fluctuation analysis41,46. Alpha was included in the above-mentioned ANOVAs, with the condition ‘silence’ added as a level in Stimulus (music, vs. metronomes vs. silence). The factor Time was not incorporated, as the measure was calculated over the complete time-series. Tukey’s HSD test of multiple comparisons was performed to analyze significant interactions. In all the above models, repeated measures were handled by specifying participant ID as a random effect, allowing for random intercepts. All other factors in the models were entered as fixed effects. The residuals of all models were checked and verified for heterogeneity. All analyses were performed using SAS JMP Pro with a significance level set to < 0.05.
Data availability
Data can be requested from Hasselt University, through dr. Lousin Moumdjian (corresponding author) or Prof. dr. Peter Feys (principal investigator of the laboratory where the research is conducted) upon request, provided that the request includes a motivation of the investigations that will be conducted, and complies to the standards of the ethical approval.
References
Repp, B. H. & Su, Y. H. Sensorimotor synchronization: A review of recent research (2006–2012). Psychon. Bull. Rev.20, 403–452. https://doi.org/10.3758/s13423-012-0371-2 (2013).
Leman, M. The Expressive Moment: How Interaction (with Music) Shapes Human Empowerment (MIT Press, 2016).
Moumdjian, L., Buhmann, J., Willems, I., Feys, P. & Leman, M. Entrainment and synchronization to auditory stimuli during walking in healthy and neurological populations: A methodological systematic review. Front. Hum. Neurosci. 12, 263. https://doi.org/10.3389/fnhum.2018.00263 (2018).
Bubic, A., von Cramon, D. Y. & Schubotz, R. I. Prediction, cognition and the brain. Front. Hum. Neurosci. 4, 25. https://doi.org/10.3389/fnhum.2010.00025 (2010).
van der Steen, M. C. & Keller, P. E. The adaptation and anticipation model (ADAM) of sensorimotor synchronization. Front. Hum. Neurosci. 7, 253. https://doi.org/10.3389/fnhum.2013.00253 (2013).
Molinari, M., Restuccia, D. & Leggio, M. G. State estimation, response prediction, and cerebellar sensory processing for behavioral control. The Cerebellum8, 399–402. https://doi.org/10.1007/s12311-009-0112-x (2009).
Gatti, D., Rinaldi, L., Ferreri, L. & Vecchi, T. The human cerebellum as a hub of the predictive brain. Brain Sci. 11 https://doi.org/10.3390/brainsci11111492 (2021).
Tanaka, H., Ishikawa, T. & Kakei, S. Neural evidence of the cerebellum as a state predictor. The Cerebellum18, 349–371 (2019).
9 Kakei, S. et al. Contribution of the cerebellum to predictive motor control and its evaluation in ataxic patients. Front. Hum. Neurosci. 13, 216. https://doi.org/10.3389/fnhum.2019.00216 (2019).
Baumann, O. et al. Consensus paper: The role of the cerebellum in perceptual processes. The Cerebellum14, 197–220. https://doi.org/10.1007/s12311-014-0627-7 (2015).
Breska, A. & Ivry, R. B. Taxonomies of timing: where does the cerebellum fit in?? Curr. Opin. Behav. Sci. 8, 282–288. https://doi.org/10.1016/j.cobeha.2016.02.034 (2016).
Ivry, R. B. & Spencer, R. M. The neural representation of time. Curr. Opin. Neurobiol.14, 225–232. https://doi.org/10.1016/j.conb.2004.03.013 (2004).
Fujita, M. Adaptive filter model of the cerebellum. Biol. Cybern.45, 195–206. https://doi.org/10.1007/BF00336192 (1982).
Wilson, E. D., Anderson, S. R., Dean, P. & Porrill, J. Sensorimotor maps can be dynamically calibrated using an adaptive-filter model of the cerebellum. PLoS Comput. Biol. 15, e1007187. https://doi.org/10.1371/journal.pcbi.1007187 (2019).
Schmahmann, J. D. The cerebellum and cognition. Neurosci. Lett.688, 62–75. https://doi.org/10.1016/j.neulet.2018.07.005 (2019).
Gatti, D., Rinaldi, L., Cristea, I. & Vecchi, T. Probing cerebellar involvement in cognition through a meta-analysis of TMS evidence. Sci. Rep.1114777. https://doi.org/10.1038/s41598-021-94051-5 (2021).
Baliviera, E. et al. Neural and behavioral entrainment to auditory rhythmic perturbations in persons with cerebellar impairment. Cereb. Cortexhttps://doi.org/10.1093/cercor/bhaf164 (2025).
18 Wolpert, D. M., Ghahramani, Z. & Jordan M. I. An internal model for sensorimotor integration. Science 269, 1880–1882 (1995).
Molinari, M., Leggio, M. G. & Thaut, M. H. The cerebellum and neural networks for rhythmic sensorimotor synchronization in the human brain. Cerebellum (Lond., England). 6, 18–23. https://doi.org/10.1080/14734220601142886 (2007).
Wolpert, D. M. & Kawato, M. Multiple paired forward and inverse models for motor control. Neural Netw.11, 1317–1329 (1998).
Manto, M. et al. Consensus paper: Roles of the cerebellum in motor control–the diversity of ideas on cerebellar involvement in movement. The Cerebellum11, 457–487. https://doi.org/10.1007/s12311-011-0331-9 (2012).
Leggio, M. & Molinari, M. Cerebellar sequencing: A trick for predicting the future. Cerebellum (Lond., England)14, 35–38. https://doi.org/10.1007/s12311-014-0616-x (2015).
Takakusaki, K. Neurophysiology of gait: From the spinal cord to the frontal lobe. Mov. Disord.28, 1483–1491. https://doi.org/10.1002/mds.25669 (2013).
Cabaraux, P. et al. Consensus paper: Ataxic gait. The Cerebellum22, 394–430. https://doi.org/10.1007/s12311-022-01373-9 (2023).
Kotz, S. A., Stockert, A., Schwartze, M. & 25, & Cerebellum, Temporal predictability and the updating of a mental model. Philos. Trans. R Soc. Lond. B Biol. Sci. 369, 20130403. https://doi.org/10.1098/rstb.2013.0403 (2014).
Nozaradan, S., Schwartze, M., Obermeier, C. & Kotz, S. A. Specific contributions of basal ganglia and cerebellum to the neural tracking of rhythm. Cortex; J. Devoted Study Nerv. Syst. Behav. 95, 156–168. https://doi.org/10.1016/j.cortex.2017.08.015 (2017).
Moumdjian, L. et al. The effect of stimulus type and tempo on sensorimotor synchronization during finger-tapping in cerebellar ataxia: behavioral and neural evidence. Cortex; a journal devoted to the study of the nervous system and behavior (2025).
Schwartze, M., Keller, P. E. & Kotz, S. A. Spontaneous, synchronized, and corrective timing behavior in cerebellar lesion patients. Behav. Brain Res.312, 285–293. https://doi.org/10.1016/j.bbr.2016.06.040 (2016).
Begel, V. et al. Dance improves motor, cognitive, and social skills in children with developmental cerebellar anomalies. Cerebellum (Lond., England). 21, 264–279. https://doi.org/10.1007/s12311-021-01291-2 (2022).
30 Takakusaki, K. Functional neuroanatomy for posture and gait control. J. Mov. Disord. 10, 1–17. https://doi.org/10.14802/jmd.16062 (2017).
Malone, L. A. & Bastian, A. J. Thinking about walking: Effects of conscious correction versus distraction on locomotor adaptation. J. Neurophysiol.103, 1954–1962. https://doi.org/10.1152/jn.00832.2009 (2010).
Buckley, E., Mazza, C. & McNeill, A. A systematic review of the gait characteristics associated with cerebellar ataxia. Gait Posture60, 154–163. https://doi.org/10.1016/j.gaitpost.2017.11.024 (2018).
Stolze, H. Typical features of cerebellar ataxic gait. J. Neurol. Neurosurg. Psychiatry73, 310–312. https://doi.org/10.1136/jnnp.73.3.310 (2002).
Morton, S. M. & Bastian, A. J. Mechanisms of cerebellar gait ataxia. Cerebellum (Lond., England). 6, 79–86. https://doi.org/10.1080/14734220601187741 (2007).
35 Ilg, W., Golla, H., Thier, P. & Giese, M. A. Specific influences of cerebellar dysfunctions on gait. Brain: J. Neurol. 130, 786–798. https://doi.org/10.1093/brain/awl376 (2007).
Marsden, J. & Harris, C. Cerebellar ataxia: Pathophysiology and rehabilitation. Clin. Rehabil.25, 195–216. https://doi.org/10.1177/0269215510382495 (2011).
Schmahmann, J. D. Disorders of the cerebellum: Ataxia, dysmetria of thought, and the cerebellar cognitive affective syndrome. J. Neuropsychiatry Clin. Neurosci.16, 367–378. https://doi.org/10.1176/jnp.16.3.367 (2004).
Zesiewicz, T. A. et al. Comprehensive systematic review summary: treatment of cerebellar motor dysfunction and ataxia: report of the guideline development, dissemination, and implementation subcommittee of the American academy of neurology. Neurology 90, 464–471. https://doi.org/10.1212/WNL.0000000000005055 (2018).
Bogaert, A., Romano, F., Cabaraux, P., Feys, P. & Moumdjian, L. Assessment and tailored physical rehabilitation approaches in persons with cerebellar impairments targeting mobility and walking according to the international classification of functioning: A systematic review of case-reports and case-series. Disabil. Rehabil.46, 3490–3512. https://doi.org/10.1080/09638288.2023.2248886 (2024).
Moumdjian, L. et al. A model of different cognitive processes during spontaneous and intentional coupling to music in multiple sclerosis. Ann. N Y Acad. Sci. 1445, 27–38. https://doi.org/10.1111/nyas.14023 (2019).
Moumdjian, L. et al. Detrended fluctuation analysis of gait dynamics when entraining to music and metronomes at different tempi in persons with multiple sclerosis. Sci. Rep.10, 12934. https://doi.org/10.1038/s41598-020-69667-8 (2020).
Ebner, T. J. & Pasalar, S. Cerebellum predicts the future motor state. Cerebellum (Lond., England). 7, 583–588. https://doi.org/10.1007/s12311-008-0059-3 (2008).
Bastian, A. J. Learning to predict the future: The cerebellum adapts feedforward movement control. Curr. Opin. Neurobiol.16, 645–649. https://doi.org/10.1016/j.conb.2006.08.016 (2006).
Moumdjian, L. et al. Continuous 12 min walking to music, metronomes and in silence: Auditory-motor coupling and its effects on perceived fatigue, motivation and gait in persons with multiple sclerosis. Mult Scler. Relat. Disord. 35, 92–99. https://doi.org/10.1016/j.msard.2019.07.014 (2019).
Moumdjian, L. et al. Walking to music and metronome at various tempi in persons with multiple sclerosis: A basis for rehabilitation. Neurorehabilit. Neural Repair. 33, 464–475. https://doi.org/10.1177/1545968319847962 (2019).
Hausdorff, J. M. Gait dynamics, fractals and falls: finding meaning in the stride-to-stride fluctuations of human walking. Hum. Mov. Sci. 26, 555–589. https://doi.org/10.1016/j.humov.2007.05.003 (2007).
Van Dyck, E. et al. Spontaneous entrainment of running Cadence to music tempo. Sports Med. Open. 1, 15. https://doi.org/10.1186/s40798-015-0025-9 (2015).
Buhmann, J., Desmet, F., Moens, B., Van Dyck, E. & Leman, M. Spontaneous velocity effect of musical expression on self-paced walking. PLoS One11, e0154414. https://doi.org/10.1371/journal.pone.0154414 (2016).
Leman, M. Embodied Music Cognition and Mediation Technology (The MIT Press, 2007).
Tanaka, H., Ishikawa, T., Lee, J. & Kakei, S. The Cerebro-Cerebellum as a locus of forward model: A review. Front. Syst. Neurosci. 14 https://doi.org/10.3389/fnsys.2020.00019 (2020).
Bunday, K. L., Ellmers, T. J., Wimalaratna, M. R., Nadarajah, L. & Bronstein, A. M. Dissociated cerebellar contributions to feedforward gait adaptation. Exp. Brain Res. 242, 1583–1593. https://doi.org/10.1007/s00221-024-06840-9 (2024).
Parrell, B., Agnew, Z., Nagarajan, S., Houde, J. & Ivry, R. B. Impaired feedforward control and enhanced feedback control of speech in patients with cerebellar degeneration. J. Neuroscience: Official J. Soc. Neurosci. 37, 9249–9258. https://doi.org/10.1523/JNEUROSCI.3363-16.2017 (2017).
Parrell, B., Kim, H. E., Breska, A., Saxena, A. & Ivry, R. Differential effects of cerebellar degeneration on feedforward versus feedback control across speech and reaching movements. J. Neuroscience: Official J. Soc. Neurosci. 41, 8779–8789. https://doi.org/10.1523/JNEUROSCI.0739-21.2021 (2021).
Vanbilsen, N. et al. Step to the beat: Auditory-motor coupling during walking to higher and lower tempi with music and metronomes in progressive multiple sclerosis: an observational study. Mult Scler. Relat. Disord. 92, 106152. https://doi.org/10.1016/j.msard.2024.106152 (2024).
Wolpert, D. M. & Miall, R. C. Forward models for physiological motor control. Neural Netw.9, 1265–1279. https://doi.org/10.1016/s0893-6080(96)00035-4 (1996).
Fechner, G. T. Elemente Der PsychophysikVol. 2 (Breitkopf & Härtel, 1860).
Pednekar, S., Krishnadas, A., Cho, B. & Makris, N. C. Weber’s Law of perception is a consequence of resolving the intensity of natural scintillating light and sound with the least possible error. Proceedings of the Royal Society A. Mathematical, Physical and Engineering Sciences 479 (2023). https://doi.org/10.1098/rspa.2022.0626
Ducharme, S. W., Kent, J. A. & van Emmerik, R. E. A. Comparable stride time fractal dynamics and gait adaptability in active young and older adults under normal and asymmetric walking. Front. Physiol.10, 1318. https://doi.org/10.3389/fphys.2019.01318 (2019).
Grahn, J. A. & Rowe, J. B. Finding and feeling the musical beat: striatal dissociations between detection and prediction of regularity. Cereb. Cortex. 23, 913–921. https://doi.org/10.1093/cercor/bhs083 (2013).
Spencer, R. M., Zelaznik, H. N., Diedrichsen, J. & Ivry, R. B. Disrupted timing of discontinuous but not continuous movements by cerebellar lesions. Science300, 1437–1439. https://doi.org/10.1126/science.1083661 (2003).
Spencer, R. M., Verstynen, T., Brett, M. & Ivry, R. Cerebellar activation during discrete and not continuous timed movements: An fMRI study. Neuroimage36, 378–387. https://doi.org/10.1016/j.neuroimage.2007.03.009 (2007).
Hogan, N. & Sternad, D. On rhythmic and discrete movements: Reflections, definitions and implications for motor control. Exp. Brain Res.181, 13–30. https://doi.org/10.1007/s00221-007-0899-y (2007).
Buhmann, J., Masson, J. B., De Cock, C., Damm, V. & Leman, L. M. in Motor Behaviour and Emotion International Congress.
Schmitz-Hubsch, T. et al. Scale for the assessment and rating of ataxia: Development of a new clinical scale. Neurology66, 1717–1720. https://doi.org/10.1212/01.wnl.0000219042.60538.92 (2006).
Peretz, I., Champod, A. S. & Hyde, K. Varieties of musical disorders. The Montreal battery of evaluation of Amusia. Ann. N Y Acad. Sci. 999, 58–75. https://doi.org/10.1196/annals.1284.006 (2003).
Ghotbi, N., Ansari, N., Naghdi, N. & Hasson, S. Measurement of lower-limb muscle spasticity: Intrarater reliability of modified modified Ashworth scale. J. Rehabil. Res. Dev.48, 83–88. https://doi.org/10.1682/jrrd.2010.02.0020 (2011).
Demeurisse, G., Demol, O. & Robaye, E. Motor evaluation in vascular hemiplegia. Eur. Neurol.19, 382–389 (1980).
Goldman, M. D., Marrie, R. A. & Cohen, J. A. Evaluation of the six-minute walk in multiple sclerosis subjects and healthy controls. Multiple Scler. J. 14, 383–390 (2008).
Forsberg, A., Andreasson, M. & Nilsagard, Y. E. Validity of the dynamic gait index in people with multiple sclerosis. Phys. Ther.93, 1369–1376. https://doi.org/10.2522/ptj.20120284 (2013).
Sebastiao, E., Sandroff, B. M., Learmonth, Y. C. & Motl, R. W. Validity of the timed up and go test as a measure of functional mobility in persons with multiple sclerosis. Arch. Phys. Med. Rehabil. 97, 1072–1077. https://doi.org/10.1016/j.apmr.2015.12.031 (2016).
Kos, D. et al. Evaluation of the modified fatigue impact scale in four different European countries. Mult. Scler.11, 76–80. https://doi.org/10.1191/1352458505ms1117oa (2005).
Zigmond, A. S. & Snaith, R. P. The hospital anxiety and depression scale. Acta Psychiatry. Scand. 67, 361–370 (1983).
Buhmann, J., Moens, B., Van Dyck, E., Dotov, D. & Leman, M. Optimizing beat synchronized running to music. PLoS One13, e0208702. https://doi.org/10.1371/journal.pone.0208702 (2018).
Buhmann, J., Moens, B., Lorenzoni, V. & Leman, M. in European Society for the Cognitive Sciences of Music. (ed Edith Van Dyck) 27–31.
Moens, B. et al. Encouraging spontaneous synchronisation with D-jogger, an adaptive music player that aligns movement and music. PLoS One9, e114234. https://doi.org/10.1371/journal.pone.0114234 (2014).
Ruxton, G. D. Testing for departure from uniformity and estimating mean direction for circular data. Biol. Lett. 13 https://doi.org/10.1098/rsbl.2016.0756 (2017).
Hausdorff, J. M., Peng, C. K., Ladin, Z., Wei, J. Y. & Goldberger, A. L. Is walking a random walk? Evidence for long-range correlations in stride interval of human gait. J. Appl. Physiol.78, 349–358 (1995).
Acknowledgements
We thank Nele Vanbilsen and Marie Poncelet’s assistance and support with parts of data collection, Joeri Verbiest’s technical assistance aiding in processing of data, and all study participants for their voluntary participation in the study.
Funding
Fonds Wetenschappelijk Onderzoek (FWO) project obtained by dr. Lousin Moumdjian, grant number 1295923N. Fonds Wetenschappelijk Onderzoek (FWO) project obtained by Prof. Peter Feys, grant number G082021N.
Author information
Authors and Affiliations
Contributions
LM, PF, ML conceptualized the research question, hypotheses, and analytic plan presented in this manuscript. BM developed and tested the custom made software delivering the experimental paradigm. LM, PC, MM, BWW, DK, PF assisted in submitting ethical applications, recruiting participants and facilitating data collection, LM undertook data collection. BM preprocessed the synchronization data, LM preprocessed the walking data. LM conducted the statistical analysis. LM, MM, BM, PC, BVW, DK, ML, PF discussed the study results and interpretation. LM drafted the manuscript and LM, MM, BM, PC, BVW, DK, ML, PF revised and provided contributions to the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Moumdjian, L., Moens, B., Manto, M. et al. Temporal prediction and feedforward control in cerebellar ataxia during spontaneous, instructed, and adaptive auditory-motor coupling while walking. Sci Rep 15, 28053 (2025). https://doi.org/10.1038/s41598-025-12316-9
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-12316-9
