
Abstract
To address the issue of coordinated optimization between urban highways and city roads, and to enhance traffic flow efficiency while alleviating congestion, the research proposes a lane control method based on an electronic toll collection system. The study utilizes long short-term memory network algorithms to achieve accurate forecasting of traffic flow and dynamic adjustment of lane opening strategies. Concurrently, an in-depth examination is carried out on the lane control mechanism embedded within the electronic toll collection system, alongside the development of a collaborative optimization model tailored for urban highways and city roads. The LSTM algorithm is utilized for traffic flow prediction. The experimental results indicate that the proposed model outperforms other models in terms of processing time, resource utilization, training time, regression loss, and convergence speed. On the METR-LA dataset, the proposed model has a processing time of 25.34 s, a resource utilization rate of 78.4%, a training time of 15.5 h, a regression loss of 0.0237, and a convergence speed of 120 iterations. Furthermore, the proposed model demonstrates strong performance in various prediction scenarios, such as short-term prediction, where the model delay is 9.67 s, the average traffic flow is 1600 vehicles/h, and the prediction stability reaches 90.4%. The significance of this research lies in the fact that the proposed model provides an effective tool for urban traffic management, capable of optimizing traffic flow in real-time, reducing congestion, and improving road utilization efficiency.
Similar content being viewed by others

Introduction
As urbanization progresses at an accelerating pace, urban traffic congestion has intensified markedly, posing a formidable obstacle to the sustainable advancement of cities1. As essential components of the urban transportation network, the efficient operation of urban highways and roads is crucial in alleviating traffic pressure and enhancing urban operational efficiency2. However, due to the uncertainty and complexity of traffic flow, traditional traffic management methods are insufficient in addressing peak traffic congestion, emergencies, and other challenges3. The urban transit system is a classic example of a dynamic and complex system, and its operation is affected by various factors, such as the number of vehicles, road capacity, weather conditions, and traffic accidents4. Traditional traffic flow prediction methods, including Autoregressive Integrated Moving Average (ARIMA) and Random Forest (RF), while capable of providing traffic flow predictions to a certain extent, have limitations in handling long-term dependencies and nonlinear features5. These methods often struggle to accurately track the fluctuating changes in traffic flow, resulting in inadequate accuracy and real-time prediction outcomes6. The limitations of traditional research are evident in that most models fail to fully exploit the temporal information and multivariate features within traffic data, and there are shortcomings in the models’ generalization and adaptability7. Furthermore, existing Electronic Toll Collection (ETC) control strategies often lack a profound understanding of the dynamic characteristics of traffic flow, making it challenging to achieve optimal adjustments to the number and sequence of lane openings8. To address these issues, an ETC lane control mechanism based on the Long Short-Term Memory (LSTM) network is proposed. LSTM, as a specialized form of Recurrent Neural Network (RNN), effectively tackles the challenges of gradient vanishing and explosion in traditional RNNs when dealing with persistent dependency issues by incorporating gating mechanisms.
From a theoretical standpoint, classical traffic flow models such as the Cell Transmission Model (CTM) and the Macroscopic Fundamental Diagram (MFD) have provided a strong basis for network-level traffic control. The CTM offers computational efficiency for network simulation, while the MFD framework captures aggregate relationships between traffic variables. However, both models often assume homogeneous driver behavior and require extensive calibration, limiting their adaptability to the real-time, lane-specific dynamics central to this study. Synthesizing these observations, it becomes clear that while various studies have proposed control strategies and prediction models, few have critically addressed the integration of predictive algorithms with dynamic lane-level actuation at urban highway-road interfaces. Many works focus on isolated aspects like lane change behavior or signal coordination, often relying on static assumptions and lacking the temporal granularity required for effective, real-time control. This gap necessitates a more sophisticated modeling approach, justifying the architecture proposed herein.
The novelty of this research lies in applying the LSTM algorithm to the collaborative optimization strategy for urban highways and roads. By analyzing traffic data in real-time, it predicts traffic demand across various time periods and dynamically adjusts the number and sequence of ETC and MTC lane openings. Furthermore, the study incorporates Complete Ensemble Empirical Mode Decomposition (CEEMD) and an attention mechanism, enhancing the model’s accuracy for traffic flow prediction and its sensitivity to key information. The main objective of the research is to construct an intelligent traffic management system capable of accurately forecasting traffic flow and optimizing ETC lane regulation. Through experimental validation, the research aims to offer an effective solution to urban traffic congestion and promote the development of smart transit systems.
The remainder of this paper is organized as follows. Section "Related works" provides a review of related literature on traffic optimization and lane control strategies. Section "Application of ETC lane regulation in collaborative optimization of urban traffic flow" details the proposed methodology, including the analysis of the ETC lane control mechanism and the construction of the collaborative optimization model. Section "Performance evaluation and comparative analysis of LTCOP-LSTM MODEL in traffic tasks" presents a comprehensive performance evaluation and comparative analysis of the proposed model. Finally, Section "Discussion" discusses the findings and their implications, while Section "Conclusion" concludes the study and outlines future research directions.
Related works
Many scholars have proposed various innovative control methods and optimization strategies to address key issues such as energy consumption optimization, traffic stability, and collision avoidance in lane keeping and lane changing processes. These methods and strategies aim to improve the safety, productivity, and ease of vehicle driving. Zhou et al. introduced a lane keeping assistance system based on driver-centered and neural adaptive control to tackle the issue of vehicle lane departure accidents. The system employed a non-deterministic equivalent adaptive control design, combined with a neural network based on radial basis functions to capture the driver’s lane keeping behavior, and implemented parameter smooth projection through the Gudermann function. The high-fidelity driving simulator validated the effectiveness of the proposed system. Compared with the baseline neural adaptive controller, this system reduced energy consumption by 34.7%, travel time by 2.83%, energy economy by 4.95%, and driving comfort by 4.60%9. Peng et al. proposed a lane change optimization method for Connected and Automated Vehicles (CAV) based on different penetration rates for heterogeneous traffic agents in mixed traffic flow. A coupled analysis framework for CAV lane change behavior and mixed traffic stability was constructed, and the optimal control strategy, encompassing longitudinal and transverse stages, was proposed based on numerical simulation. The research results indicated that the proposed strategy significantly improved the ease, productivity, safety, and steadiness of heterogeneous traffic agents compared to baseline maneuvers10. Wu et al. proposed a hierarchical cooperative ecological driving control strategy for CAV fleets. This strategy planned the ecological speed trajectory of the fleet through V2X communication technology, and optimized the speed trajectory of the leading and following vehicles through pseudospectral methods and rolling optimization algorithms to enhance the driving ease, safety, and energy economy of the fleet. The simulation outcomes showed that compared with manual driving, this strategy could significantly reduce the total energy expenditure and travel time of the fleet, decreasing them by 26.10% and 2.83% respectively11. Samuel et al. conducted simulation experiments on a vision-based fuzzy-PID lane keeping control system to simulate a monorail bicycle model and assess the validity of three methods. The results indicated that the fuzzy-PID controller exhibited the best performance in response time and stability time, with smaller oscillations and faster response12. Bhat et al. explored the application of a vision-based fuzzy-PID lane keeping control system in a monorail bicycle model. The study compared the performance of this system with other lane keeping control methods and model predictive control, and found that the fuzzy-PID controller performed the best in response time and stability time, with smaller oscillations and faster response13. Collectively, these studies highlight significant progress in optimizing the behavior of individual vehicles and platoons, enhancing safety and local efficiency. However, their focus on micro-level dynamics means they are not designed to manage the macro-level congestion originating from fixed infrastructure bottlenecks, such as the urban expressway-to-road interfaces central to this study.
Scholars have explored multidimensional traffic optimization strategies to enhance the efficiency, sustainability, and security of urban transit systems. Guo et al. proposed a collaborative optimization strategy for the power system and vehicle motion of Hybrid Electric Vehicles (HEVs) based on intelligent networking technology to address the problem of coordinated optimization between urban highways and urban roads. The research method involved establishing a hierarchical optimal control system that combined speed planning and energy management to improve the energy efficiency of autonomous driving HEVs. The experimental results indicated that, compared with sequential optimization, collaborative optimization improved fuel economy by 9.38% to 13.03% across various testing cycles and enhanced vehicle handling by 0.31% to 3.15%, while ensuring real-time capability14. Louati et al. addressed the issue of right-of-way conflicts between trams and connected vehicles at urban intersections. They proposed a bus signal priority system and a collaborative optimization approach, employing an enhanced genetic algorithm to adjust signal timings and operational routes. Their findings suggested that this framework could significantly reduce the overall travel time for trams and connected vehicles, while also decreasing energy consumption and improving comfort levels15. Zhou et al. focused on the impact of urban form on ecological effects such as the urban heat island effect, ventilation, and air pollution, and explored planning methods for coordinated optimization of urban highways and roads. The research method included establishing a multiple regression model between urban form factors and environmental impacts in Shenyang, analyzing the impact of factors such as street aspect ratio, building density, and vegetation coverage on environmental impacts. The experimental results showed that the five ecological effect indicators improved by 8.4%, 5.0%, 31.6%, 33.1%, and 12.5% respectively, effectively constructing a collaborative optimization planning and design method16. Zhang et al. constructed a vehicle particle model to tackle collision avoidance issues during high-speed lane changes and compared three different collision avoidance methods. The findings revealed that, in scenarios involving high-speed emergency collision avoidance, the requisite longitudinal distance for executing a lane change to avert a collision was notably shorter than that needed for braking-based collision avoidance alone, and was comparable to the distance achieved through a combined lane-changing and braking collision avoidance strategy17. Ulvi et al. utilized the data-driven method UTMOM to integrate data mining and mathematical modeling to analyze urban traffic datasets, aiming to uncover patterns of traffic flow fluctuations. The research found that UTMOM could effectively reflect actual traffic scenarios and provide decision support for traffic management and urban planning18. Collectively, these studies highlight significant progress in optimizing the behavior of individual vehicles and platoons, enhancing safety and local efficiency. However, their focus on micro-level dynamics means they are not designed to manage the macro-level congestion originating from fixed infrastructure bottlenecks, such as the urban expressway-to-road interfaces central to this study.
Synthesizing these observations, it becomes clear that while various studies have proposed control strategies and prediction models for traffic optimization, few have critically addressed the integration of predictive algorithms with dynamic lane-level actuation, especially under real-time urban highway-road interfaces. Many works focus on isolated aspects like lane change behavior, signal coordination, or energy efficiency without embedding learning-based flow prediction into adaptive lane control schemes. Moreover, these models often rely on static assumptions, lack temporal granularity, or disregard stochastic driver behavior.
From a theoretical standpoint, classical traffic flow models such as the Cell Transmission Model (CTM) and the Macroscopic Fundamental Diagram (MFD) have provided a strong basis for network-level traffic control. The CTM, originally formulated by Daganzo, discretizes time and space to model vehicle propagation and queuing behavior, offering computational efficiency for network simulation and ramp metering optimization. The MFD framework, introduced by Geroliminis and Daganzo, captures the relationship between traffic density and flow at an aggregate level across urban networks. While effective, both models assume homogeneous driver behavior and often require fine-grained calibration, which limits their adaptability to real-time lane-specific dynamics.
The innovations of this study are claimed as: (1) It constructs an LTCOP-LSTM model that integrates CEEMD, attention mechanism, and LSTM. CEEMD can decompose the original traffic flow data into multiple intrinsic mode functions and residual components, and mine the multi-scale characteristics of the data. The attention mechanism can dynamically weight key time steps, highlight important information, enhance the model’s sensitivity to key time point information, and improve the model’s ability to handle complex spatiotemporal patterns, breaking through the bottleneck of traditional models in capturing traffic data characteristics. (2) The SAE neural network is introduced to optimize the LSTM model architecture. SAE compresses and encodes high-dimensional spatiotemporal feature data through nonlinear mapping. While optimizing feature representation learning, it extracts key traffic features and integrates them into the LSTM network to further improve the accuracy of traffic flow prediction and open up a new path for improving model performance.
This study has the following two aspects of contribution:
(1) A real-time ETC/MTC lane configuration strategy integrating CEEMD multi-scale feature decomposition and attention mechanism is proposed. By extracting multi-dimensional features from traffic flow data and dynamically weighting key time steps, it enables dynamic optimization of lane configuration based on real-time traffic flow and vehicle status.
(2) Integrating CEEMD with the attention mechanism, the LTCOP-LSTM model significantly enhances its capacity to process multi-scale features and key time-point information. This model outperforms traditional methods on multiple traffic datasets, boasting better processing time, resource utilization, and training efficiency. Moreover, it features strong real-time performance, facilitating dynamic lane strategy adjustments according to real-time traffic flow to optimize traffic conditions during peak and off-peak hours.
Application of ETC lane regulation in collaborative optimization of urban traffic flow
Analysis of ETC lane control mechanism
Traffic congestion typically arises when the demand for road use surpasses the available road capacity, resulting in vehicles being obstructed and halted on particular stretches of road, particularly at the junctions where urban highways meet urban roads19. When demand does not exceed capacity, vehicles can travel without hindrance. However, as demand grows, the once smooth flow of traffic begins to deteriorate into chaos, and travel times increase. Should the demand exceed the minimum capacity at a bottleneck, congestion ensues, causing vehicles upstream to form queues as they cannot pass through the bottleneck20. The specific changes are depicted in Fig. 1.

Correlation between driving speed and congestion duration.
As depicted in Fig. 1, the ETC system can diminish the influx of vehicles and mitigate congestion in heavily trafficked areas by intelligently managing lane openings and toll collection strategies. In crowded zones, lane openings are dynamically adjusted, speeds are increased, and the duration of congestion is reduced. In this study, the tollbooths are assumed to be located primarily at expressway entrance ramps, rather than on mainline segments. This design reflects the common urban tolling configuration in China, where ETC/MTC lanes are positioned at the upstream boundary between city roads and expressway systems. This configuration implies that lane control strategies affect the inflow of vehicles onto the expressway, rather than regulating traffic within the mainline itself. As such, adjustments in the number of open ETC or MTC lanes influence how many vehicles transition from the urban road network into the expressway system per unit time. While this facilitates mainline protection and can reduce downstream congestion, it may lead to queuing spillback on urban connector roads, particularly under high demand conditions. To mitigate such effects, the research lane regulation model incorporates dynamic feedback from urban road congestion status, ensuring that excessive queuing upstream is penalized in the lane allocation optimization function. Conversely, lanes in less congested areas remain open to ensure a steady flow of traffic. The topology structure and vehicle processing at the toll station on the highway are illustrated in Fig. 2.

Topology and vehicle handling flow of toll stations on highways.
Figure 2 depicts the layout of road connection nodes, passable lanes, and ETC and MTC toll lanes. In the ETC lane control mechanism, vehicles pass through nodes 1 and 2 before entering the toll station and capture information via sensors on the gantry. ETC vehicles (node 3) that have successfully completed the pre-transaction will exit the toll station directly via the accessible lane (node 4). ETC vehicles with failed pre-payments and MTC vehicles without installed or damaged onboard units will complete transactions at the ETC toll lane (node 11) and MTC toll lane (node 12) respectively before departing. The regulation mechanism adjusts the number and sequence of ETC and MTC lanes in real-time, based on traffic flow and vehicle status monitoring, with the aim of improving traffic efficiency and alleviating congestion.
In this study, the tollbooths are assumed to be located primarily at expressway entrance ramps, rather than on mainline segments. This design reflects the common urban tolling configuration in China, where ETC/MTC lanes are positioned at the upstream boundary between city roads and expressway systems. This configuration implies that lane control strategies affect the inflow of vehicles onto the expressway, rather than regulating traffic within the mainline itself. As such, adjustments in the number of open ETC or MTC lanes influence how many vehicles transition from the urban road network into the expressway system per unit time. While this facilitates mainline protection and can reduce downstream congestion, it may lead to queuing spillback on urban connector roads, particularly under high demand conditions. To mitigate such effects, the research lane regulation model incorporates dynamic feedback from urban road congestion status, ensuring that excessive queuing upstream is penalized in the lane allocation optimization function. To further enhance traffic flow efficiency and reduce congestion, Fig. 3 illustrates the arrangement of traffic and detection coils within the ETC lane of the highway.

Layout of vehicle passage and detection coil in ETC lane of expressway.
Figure 3 illustrates the process of vehicles passing through the ETC lane at a highway toll station, encompassing vehicle entry, the layout of detection coils, and vehicle departure. Vehicles enter from the left and proceed through a series of detection coils designed for vehicle recognition and transaction processing. Based on the vehicle type, vehicles are directed to the appropriate ETC lanes. After completing the transaction, they exit the toll station in the specified direction. The ETC lane control mechanism employs detection coil data to monitor traffic flow and dynamically adjust lane configurations to optimize traffic efficiency. During peak hours, additional ETC lanes are opened to expedite vehicle traffic. Conversely, during off-peak hours, the number of open lanes is reduced to cut costs. Moreover, the regulatory mechanism can allocate dedicated lanes based on vehicle types and traffic flow predictions, thereby enhancing the operational efficiency of toll stations, ensuring rapid and orderly vehicle passage, and improving the overall efficacy of the transit system.
While ETC lane configuration is often treated as a binary decision—either opened or closed—it is critical to consider the underlying queuing and merging dynamics, which significantly influence traffic efficiency. In the study, simplified queuing theory is incorporated at the lane level. The toll plaza is modeled as a multi-server queuing system, in which each ETC or MTC lane functions as a parallel service channel with distinct processing speeds. The average waiting time in each lane is approximated using the M/M/1 queue formulation.
In Eq. (1), \(W_{i}\) is the average waiting time in lane \(i\), \(\lambda_{i}\) is the arrival rate, and \(\mu_{i}\) is the service rate of the lane type (ETC/MTC). Merging behavior is also considered using a conflict cost function \(M_{c}\), which penalizes sudden lane changes and flow merges at ETC/MTC boundary points. This is integrated into the overall optimization objective as a penalty term. In addition, the research defines a compliance factor \(\theta \in [0,1]\) representing the probability that vehicles comply with ETC-only restrictions. Non-compliant vehicles are assumed to increase the delay at toll plazas due to improper lane use or redirection to MTC lanes. To assess the feasibility of large-scale ETC adoption, the model introduces a penetration rate parameter \(\gamma \in [0,1][0,1]\) , which indicates the proportion of vehicles equipped with valid ETC devices. This factor directly influences the optimal allocation of ETC vs. MTC lanes. The correlation between a vehicle’s speed at a given moment and the speed of a traffic signal emitted at a previous point is depicted in Eq. (2).
In Eq. (2), \(v_{p}\) means the speed of the vehicle at time \(t\). \(v_{s} \left( {t - tr} \right)\) means the signal status emitted by the traffic light at time \(t - tr\). \(tr\) represents the time delay. The time required for vehicles to pass through intersections at different speeds is calculated as shown in Eq. (3).
In Eq. (3), \(v_{str}\) represents the remaining distance or time interval that the vehicle needs to cover. The calculation method for the braking distance of vehicles under specific conditions in traffic flow is shown in Eq. (4).
In Eq. (4), \(L\) represents the braking distance of the vehicle. The contribution of different traffic flows or lanes to the overall traffic situation is evaluated as shown in Eq. (5).
In Eq. (5), \(X\) is the weighted average of the comprehensive indicators. \(q_{i}\) is the flow rate of the \(i\)th traffic flow. \(V_{i}\) is the speed of the \(i\)th traffic flow. The expected headway of vehicles in traffic flow is calculated in Eq. (6).
In Eq. (6), \(\overline{d}_{i}\) means the expected headway of the \(i\)th traffic flow or lane. \(C\) means the traffic capacity of the road. \(\lambda_{i}\) means the flow ratio of the \(i\)th traffic flow. \(x_{i}\) means the traffic occupancy rate of the \(i\)th traffic flow.
Construction of collaborative optimization model for urban highways and urban roads
The LSTM algorithm effectively addresses the issue of gradient disappearance and explosion in traditional RNNs by employing its unique gating mechanism21. This algorithm utilizes memory cell units in the hidden layer, replacing traditional simple structures such as a single tanh layer, enabling it to learn and maintain long-term dependencies22,23. In the ETC lane control mechanism, the application of LSTM is evident in the prediction of traffic flow and the dynamic adjustment of lane opening strategies24. By analyzing traffic data in real-time, LSTM models can predict traffic demand at various time periods, providing decision support for the number and sequence of ETC and MTC lane openings, optimizing vehicle traffic efficiency, and reducing congestion25. The input features of the LSTM prediction model encompass traffic flow (vehicles/h), vehicle speed (kilometers/h), time information, weather conditions, road types, traffic events, and historical traffic data from the past 24–48 h. These features are selected based on their correlation with traffic behavior and their capacity to capture significant patterns. Traffic flow is a crucial indicator for measuring road congestion, vehicle speed reflects the smoothness of traffic, time information is utilized to capture traffic fluctuations throughout the day, weather conditions are factored into predictions as categorical variables, road types are categorized based on the impact of different environments on traffic patterns, traffic events are inputted as binary or specific types, and historical data are employed to capture time-dependent and periodic patterns. The primary outputs of this model include predictions for traffic flow for the next 10, 15, or 30 min, as well as predictions for vehicle speed, congestion probability, and lane utilization. The congestion probability quantifies the likelihood of traffic congestion occurring during the prediction period, while lane utilization predictions determine the optimal number of open lanes for a given traffic volume. These outputs assist in optimizing traffic management, ensuring smooth traffic flow, reducing congestion, and enhancing overall road utilization efficiency. The cell structure of the LSTM is illustrated in Fig. 4.

Cell structure of LSTM network.
In Fig. 4, the function of the forget gate (FG) in LSTM is to filter the state information of neurons at time \(k - 1\), to determine whether it affects the state of neurons at time \(k\). In the collaborative optimization model of urban highways and urban roads, LSTM can be used to predict traffic flow and traffic conditions26. The output used to calculate the FG is shown in Eq. (7).
In Eq. (7), \(f\left( k \right)\) is the output of the FG, which can determine which old traffic information is no longer important for predicting the current traffic situation. \(\sigma\) is the sigmoid function. \(W_{f}\) is the weight matrix of the FG. \(h_{k - 1}\) represents the hidden state (HS) of the previous time step. \(x_{k}\) represents the input of the current time step. \(b_{f}\) represents the bias term of the FG. Then, a new memory cell value for the LSTM network is generated, which will be combined with the outputs of the FG and input gate (IG) to update the state of long-term memory cells, as shown in Eq. (8).
In Eq. (8), \(C_{k}\) represents the candidate memory cell state at the current time step, which represents the traffic information at the current time step. \(W_{c}\) represents the weight matrix of memory cell states27. The formula for calculating the output of the IG is shown in Eq. (9).
In Eq. (9), \(i_{k}\) is the output of the IG. \(W_{i}\) is the weight matrix of the IG. \(b_{i}\) is the bias term of the IG. The IG determines which new traffic information is important for predicting current traffic conditions and should be added to memory cells. The scoring function \(S_{t}\) generates the output of the current time step by comprehensively considering the HS of the previous time step, the cell state, and the input of the current time step, which can be used to evaluate the current traffic situation, as shown in Eq. (10).
In Eq. (10), \(s_{t - 1}\) means the HS of the previous time step. \(c_{t - 1}\) means the cell state of the previous time step. \(c_{t - 1}\) represents the cell state of the previous time step. When regulating ETC lanes, the context vector can help the model identify which time periods of traffic flow are most important for current control decisions, as shown in Eq. (11).
In Eq. (11), \(\alpha_{ti}\) is the attention coefficient. \(h_{i}\) represents the HS at time step \(i\). \(T\) means the overall quantity of time steps in the sequence. The calculation of attention coefficient is shown in Eq. (12).
In Eq. (12), \(e_{ti}\) represents the score for the \(i\)th time step at time step \(t\). \(N\) means the overall quantity of time steps in the sequence. The calculation of the score \(e_{ti}\) for the \(i\)th time step is shown in Eq. (13).
In Eq. (13), \(f\) is the function used to calculate the score. The model can identify which historical time steps of traffic flow data have the most impact on the current prediction by calculating the score \(e_{ti}\).
Figure 5 integrates CEEMD, LSTM, and attention mechanisms. The model initially decomposes the original traffic flow data sequence into multiple Intrinsic Mode Functions (IMFs) and residual components using CEEMD to capture multi-scale features of the data. Subsequently, each IMF is fed into an LSTM network to extract time series features. The features processed by LSTM are integrated in the feature fusion layer to form a unified feature representation. Next, the fused features are weighted through an attention mechanism to highlight key information and enhance the model’s sensitivity to important time steps. Finally, the weighted features are used to generate predicted traffic flow results.

Architecture of traffic flow prediction model based on CEEMD-LSTM and attention mechanism.
In the collaborative optimization model for urban highways and urban roads, a Self-encoding Associative Memory (SAE) neural network is introduced to improve the predictive performance of LSTM. SAE compresses and encodes high-dimensional spatiotemporal feature data through nonlinear mapping to optimize feature representation learning. The encoder extracts potential features, the decoder reconstructs the input data, and feature extraction is achieved by minimizing the reconstruction error, as depicted in Fig. 6.

Application of self-encoder in traffic flow prediction.
As depicted in Fig. 6, a self-encoder is an unsupervised learning neural network utilized for feature extraction and data dimensionality reduction. The input layer comprises multiple nodes that represent various input features, such as traffic flow, speed, time, and weather conditions. The encoder part of the network compresses these features into a compact representation within the latent space, and the decoder subsequently extends these latent space features back to the original input space to reconstruct the input data28. Self-encoders are trained to learn efficient representations of input data by minimizing the discrepancy between the input and output. Within the collaborative optimization model for urban highways and roads, self-encoders are employed to extract critical traffic features, which are then integrated into LSTM networks to enhance the precision of traffic flow prediction29. Self-encoders are also capable of extracting key features from traffic flow data, with the calculation process for the activation values of hidden layer units illustrated in Eq. (14).
In Eq. (14), \(a^{(k)}\) is the activation value of the hidden layer unit in layer \(k\). \(f\) is the activation function. \(z^{(k)}\) is the weighted input for layer \(k\). The feature extraction of different layers is shown in Eq. (15).
In Eq. (15), \(z^{{\left( {k + 1} \right)}}\) is the weighted input of the self-encoder from layer \(k\) to layer \(k + 1\). \(W^{{\left( {k,1} \right)}}\) and \(b^{{\left( {k,1} \right)}}\) are the weights and biases of layer \(k\), respectively. The decoding process can convert the features extracted by the encoder back into the original data space for simulating and predicting traffic flow, as shown in Eq. (16).
In Eq. (16), \(g\) represents the decoding mapping function. In the traffic model, through the output of the decoding layer, the model can generate predictions for traffic flow, as shown in Eq. (17).
In Eq. (17), \(W^{{\left( {n - k,2} \right)}}\) and \(b^{{\left( {n - k,2} \right)}}\) are the weights and biases of the \(n - k\) th layer, respectively. For classification tasks, this output vector can function as an input characteristic for the classifier30. Finally, the collaborative optimization traffic control framework is shown in Fig. 7.

Collaborative optimization traffic control framework diagram.
As depicted in Fig. 7, the input encompasses the number of toll station lanes and traffic demand, influencing the traffic flow status. This status is integrated with traffic capacity and speed limit values, which are fed into the controller. The controller then iteratively engages with the highway system to enhance traffic flow through the prediction of step size, objective function, and optimization process.
System modeling
The study prioritizes reducing mainline congestion, as downstream congestion can cause wider impacts, such as shock wave propagation and exit blockage. Therefore, the optimization framework dynamically adjusts the number of ETC/MTC lanes based on mainline traffic forecasts, rather than just the length of queues at toll booths. However, to avert overly long queues at toll booths, a dual-objective function is utilized. It seeks to reduce mainline density and delays while also constraining the time and length of queues at toll booths, especially when there is a risk of queues extending to urban roads.
To formalize this collaborative approach, the model explicitly considers the state of upstream urban road segments feeding the expressway ramps. While the primary focus remains on optimizing mainline flow, the system is designed to prevent the detrimental spillover effects criticized by traditional ramp metering. The model represents each expressway entrance as being fed by a representative urban arterial road segment, characterized by its traffic volume \(V_{urban}\), average speed \(S_{urban}\), and occupancy \(O_{urban}\). These urban traffic indicators are treated as exogenous variables that influence lane allocation decisions.
Specifically, the queuing model at the tollbooth (described in Eqs. 21–22) is directly linked to urban road performance. A key element of the “collaborative optimization” is a queue spillback penalty function, \(P_{spillback} (L(t))\) , which is integrated into the overall objective function. This function sharply increases the penalty when the tollbooth queue length, \(L(t))\), approaches a threshold \(L_{max}\) that would cause it to physically interfere with intersections on the connecting urban arterial. For instance, when congestion is detected on upstream urban roads (e.g., high \(O_{urban}\) or falling \(S_{urban}\)), or when \(L(t))\) is nearing \(L_{max}\), the lane control algorithm is penalized for further restricting ramp inflow. This forces the controller to balance the objective of protecting the highway mainline against the objective of maintaining mobility on the urban road network, thus preventing the system from simply transferring congestion from one domain to the other. This trade-off is the essence of the collaborative strategy claimed in this work.
To provide a clear foundation for the optimization framework, the control problem is formally defined with explicit decision variables, control actions, and constraints. The primary control action is the dynamic regulation of traffic inflow at the expressway on-ramps, implemented by adjusting the configuration of tollbooth lanes at each discrete time step t. The decision variables for the optimization algorithm are therefore the number of ETC lanes, and manual lanes allocated to each on-ramp i during each time interval \(t\).
To provide a clear foundation for the optimization framework, the control problem is formally defined with explicit decision variables, control actions, and constraints. The primary control action is the dynamic regulation of traffic inflow at the expressway on-ramps, implemented by adjusting the configuration of tollbooth lanes at each discrete time step t. The decision variables for the optimization algorithm are therefore the number of ETC lanes, \(n_{ETC} \left( t \right)\), and MTC lanes, \(n_{MTC} \left( t \right)\) to be opened, where the tuple represents the control strategy for the interval \([t,t + \Delta t]\).
This optimization is subject to a set of constraints that define the feasible solution space. These include physical lane constraints, where the number of activated lanes cannot exceed the total available at the facility \(\left( {0 \le n_{ETC} (t) \le 3and0 \le n_{MTC} (t) \le 2} \right)\) , and integer constraints, as lanes cannot be fractionally opened \(\left( {n_{ETC} (t),n_{MTC} (t) \in {\mathbb{Z}} \ge 0} \right)\). Furthermore, the framework incorporates operational constraints, which are treated as soft constraints within the objective function (Eq. 18). These guide the optimization towards desirable outcomes by penalizing states where the downstream highway capacity, \(q_{cap}\) is exceeded or where the upstream queue length, \(L(t)\) surpasses a critical physical threshold, \(L_{max}\) that would cause spillback. Finally, the model is also bound by the upstream input flow constraint, acknowledging that the vehicle arrival rate from the urban network, \(\lambda_{urban} (t)\) is physically limited by the capacity of the feeding arterial, as defined in Eq. (23).
These trade-offs are reflected in the weighted penalty terms in the objective function (see Eq. 18). The core of the collaborative optimization framework is a multi-objective function designed to balance the competing needs of the highway mainline and the adjacent urban road network. The control strategy, which involves dynamically adjusting the number of open ETC and MTC lanes, is optimized by minimizing a total weighted cost function, \(J_{total}\). This function explicitly resolves the trade-offs between mainline efficiency and urban road spillback. The objective function is formulated as shown in Eq. (18).
In Eq. (18), \(J_{mainline}\) represents the cost associated with congestion on the highway mainline. It is a function of traffic speed deviation and flow overload, aiming to maintain a high level of service on the expressway. It can be defined, as shown in Eq. (19).
In Eq. (19), \(v_{des}\) is the desired speed, \(v_{t}\) is the predicted speed, \(q_{t}\) is the predicted flow, and \(q_{cap}\) is the highway capacity. \(P_{spillback}\) is the penalty function for traffic queues at the toll plaza spilling back onto the urban road network. This term quantifies the negative impact on urban traffic. It is a function of the queue length \(L(t)\) at the tollbooth, sharply increasing as \(L(t)\) approaches a critical threshold \(L_{max}\) that threatens to block urban intersections. It can be modeled, as shown in Eq. (20).
\(w_{mainline}\) and \(w_{urban}\) are the critical weighting coefficients. These are not part of the LSTM algorithm but are high-level policy parameters that balance the two conflicting objectives. A higher \(w_{urban}\) prioritizes preventing urban road congestion, potentially at the cost of some highway efficiency, and vice versa. The values of these weights are determined through simulation-based calibration to reflect specific traffic management priorities.
To achieve a truly integrated management framework, the urban road queue is not treated as a mere exogenous variable. Instead, its dynamics are actively modeled as an endogenous state variable within the optimization problem. The queue length at the toll plaza, \(L(t)\) , which directly affects the urban road network and is governed by the state-transition equation shown in (21).
In Eq. (21), \(L(t)\) is the queue length at the toll plaza at time \(t\). \(\lambda_{urban} (t)\) is the vehicle arrival rate from the urban arterial, which can be provided by upstream sensors or short-term prediction models. \(\mu_{plaza} (u_{t} )\) is the total service rate of the toll plaza, which is a direct function of the control decision \(u_{t}\)—the number of open ETC lanes. Specifically, \(\mu_{plaza} (ut) = n_{ETC} \cdot \mu_{ETC} + n_{MTC} \cdot \mu_{MTC}\), where \(\mu_{ETC}\) and \(\mu_{MTC}\) are the service rates of individual ETC and MTC lanes. \(\Delta t\) is the discrete time step. This formulation (Eq. 21) ensures that the urban queue length \(L(t + 1)\) is explicitly modeled as a consequence of the control action \(u_{t}\).The suggested model will be designated as the Traffic Flow Collaborative Optimization and Prediction Model Based on LSTM (LTCOP-LSTM).
This study’s CO2 and NOx emission estimation uses established emission factors and simulation outputs via the SUMO platform with its default HBEFA 3.1 emission model. This model maps vehicle speeds to emission rates based on empirically measured driving cycles across different vehicle types and road conditions. To ensure scientific validity, research emission estimates are cross-referenced against published results like Barth and Boriboonsomsin (2009), showing that reducing stop-and-go behavior near bottlenecks can reduce CO2 emissions by 5–15% based on traffic density and compliance31.
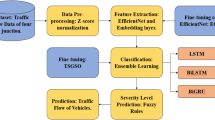
Research architecture and data processing flow
The proposed LTCOP-LSTM model employs a multi-stage process for accurate traffic flow prediction. Initially, raw traffic flow data is decomposed into multiple Intrinsic Mode Functions (IMFs) and a residual component using Complete Ensemble Empirical Mode Decomposition (CEEMD) to capture multi-scale temporal features. Each IMF is then input into separate Long Short-Term Memory (LSTM) networks to extract temporal dependencies. The learned features from these parallel LSTMs are concatenated in a feature fusion layer, followed by an attention mechanism that dynamically assigns weights to different time steps, focusing on critical information. Finally, the attention-weighted feature vector is passed through a fully connected layer to produce the predicted traffic flow results. Additionally, a Stacked Autoencoder (SAE) is used for pre-training to extract key features from high-dimensional spatiotemporal data, further improving predictive accuracy.
Model components and parameterization
To ensure the collaborative optimization model is well-defined and reproducible, this section provides explicit details on its core components and parameterization, addressing urban arterial constraints, tollbooth characteristics, and downstream highway capacity.
The model acknowledges that traffic arriving at the on-ramp is not an unconstrained demand but is dictated by the capacity of the feeding urban arterials. The urban arterial connected to the on-ramp is modeled with a defined capacity constraint. The arrival rate at the toll plaza, \(\lambda_{urban} (t)\) , is therefore constrained by the physical capacity of this arterial. A simplified capacity constraint is applied, as shown in Eq. (23).
In Eq. (23), \(q_{{urban_{t} hrough}}\) is the capacity of the urban arterial, assumed to be a standard value of 1800 vehicles/h/lane. \(q_{{urban_{t} hrough}} (t)\) is the volume of traffic on the arterial that is continuing straight and not entering the on-ramp. For the simulation, the traffic demand feeding the ramp is sourced from the SUMO traffic demand profiles, representing realistic urban flow patterns (e.g., peak demand of 2400 veh/hr across all approach lanes). This ensures that \(\lambda_{urban} (t)\) reflects a plausible traffic load limited by upstream conditions, directly integrating the urban road’s state into the optimization. The queue at the tollbooth is modeled as a discrete-time dynamic system governed by the state-transition Eq. (21). The key parameters for this sub-model are defined as follows.
Service Rates: The service rates for individual lanes are based on empirical data for tolling facilities. ETC Lane Service Rate(\(\mu_{ETC}\)): 1000 vehicles/h/lane. MTC Lane Service Rate (\(\mu_{MTC}\)): 450 vehicles/h/lane.
Total Plaza Service Rate(\(\mu_{plaza} (u_{t} )\)): This is the control-dependent departure rate, calculated as \(\mu_{plaza} (ut) = n_{ETC} \cdot \mu_{ETC} + n_{MTC} \cdot \mu_{MTC}\), where \(n_{ETC}\) and \(n_{MTC}\) are the number of open lanes determined by the control strategy \(u_{t}\). Queue Capacity (\(L_{max}\)): The critical queue length threshold is defined physically. It is set to 50 m, corresponding to a queue of approximately 8–10 passenger vehicles. Queues exceeding this length are assumed to cause spillback into the upstream urban intersection, triggering the sharp penalty defined in \(P_{spillback}\).
The capacity of the downstream highway mainline, \(q_{cap}\) used in the mainline cost function \(J_{mainline}\) (Eq. 19), is a critical constraint. It represents the maximum flow the highway can handle before breaking down into a congested state. This value is parameterized as:
Highway Capacity per Lane (\(q_{cap\_per\_lane}\)): Set to a standard value of 2000 vehicles/h/lane. Total Highway Capacity (\(q_{cap}\) cap): For a highway with \(N_{hwy}\) lanes, the total capacity is \(q_{cap} = N_{hwy} \cdot q_{cap\_per\_lane}\). The simulation environment models a 3-lane highway section, resulting in a total \(q_{cap}\) of 6000 vehicles/h. By explicitly defining these components, the model provides a more complete and transparent foundation for the collaborative optimization strategy, ensuring that decisions are made based on the interconnected capacities and constraints of the entire urban highway-road system.
Performance evaluation and comparative analysis of LTCOP-LSTM model in traffic tasks
Performance analysis of LTCOP-LSTM model
To validate the proposed LTCOP-LSTM collaborative optimization strategy under conditions resembling real-world traffic, the open-source microscopic traffic simulation platform Simulation of Urban Mobility (SUMO) was utilized. To ensure a rigorous and reproducible validation, the study employed the Simulation of Urban Mobility (SUMO) v1.18 platform. The simulation integrated traffic demand data and lane control signals from the LTCOP-LSTM model via the TraCI (Traffic Control Interface). The scenario was modeled after a typical urban highway-to-city-road interchange featuring 3 ETC lanes and 2 MTC lanes. Traffic demand was set to 2400 vehicles/h for peak-hour flow and 1000 vehicles/h for non-peak conditions, with a total simulation duration of 2 h executed in 1-min time steps. To validate the model’s effectiveness, its performance was benchmarked against two distinct control scenarios representing both static and classic adaptive control philosophies. The first, a Static Control (Baseline), represents the simplest approach with a pre-defined, unchanging distribution of ETC and MTC lanes that does not vary with traffic conditions, serving as a lower-bound performance benchmark. For a more robust comparison, a Queue-Threshold Control (Classic Adaptive Baseline) was also implemented, representing a traditional traffic management technique. This controller operates on a reactive feedback mechanism derived from queuing theory; it opens an additional lane when a predefined upper queue-length threshold is exceeded and closes one when the queue subsides below a lower threshold. Finally, these two baselines were compared against the LTCOP-LSTM (Proposed Control), which is the predictive strategy detailed in this study.
Key performance indicators such as average delay (s/vehicle), congestion duration (min), average vehicle throughput (vehicles/h), and lane utilization (%) were used for evaluation. To account for the stochastic nature of traffic flow, each scenario was run 10 times, and the mean values of the metrics were used for the final analysis to ensure statistical validity. LTCOP-LSTM model were integrated into the simulation through TraCI (Traffic Control Interface). The study used SUMO v1.18 as the simulation tool and modeled the map scenario based on a typical urban highway-to-city-road interchange with 3 ETC lanes and 2 MTC lanes. The traffic volume was set at 2400 vehicles/h for peak-hour flow and 1000 vehicles/h for non-peak flow. The simulation duration was 2 h with 1-min time steps, and the evaluation metrics included average delay (s/vehicle), congestion duration (min), average vehicle throughput (vehicles/h), and lane utilization (%). In the verification process, two control scenarios were simulated: Baseline control with static ETC/MTC lane distribution and Proposed control with dynamic lane allocation using the LTCOP-LSTM strategy. Each simulation was run 10 times to account for randomness, and the mean values were used for evaluation. To ensure the fidelity and relevance of the simulation, careful consideration was given to the modeling of the traffic environment. The traffic demand was modeled using a dynamic, time-varying profile to emulate realistic urban traffic patterns, featuring a peak-hour flow of 2400 vehicles/h and an off-peak flow of 1000 vehicles/h. This approach captures the essential tidal characteristics of daily commuter traffic. Regarding route assignment, given that the study focuses on a localized bottleneck at a specific highway interchange, complex dynamic route choice models were not necessary. Instead, vehicles were assigned predefined static routes within the SUMO environment, reflecting the straightforward path from the urban arterial onto the expressway ramp. For network calibration, while a detailed calibration against site-specific field data was beyond the scope of this study, the simulation relied on the widely accepted and validated default parameters within SUMO for car-following (e.g., Krauss model) and lane-changing behaviors. This standard practice ensures the reproducibility and generalizability of the findings, providing a robust baseline for evaluating the performance of the proposed control strategy.
The model training was based on an NVIDIA GPU cluster. Its core configuration consists of eight NVIDIA A100 PCIe 40 GB GPUs (supporting FP16 mixed-precision training), two Intel Xeon Platinum 8375C processors, and 1 TB of DDR4 ECC memory. Additionally, it was paired with a 20 TB NVMe SSD cluster to achieve high-speed data reading and writing.
The industrial deployment adopted a "cloud + edge" architecture. Cloud servers, which are a type of industrial computing setup, integrated TensorRT to accelerate inference, optimizing the model latency to 18.7 ms. The edge end used the NVIDIA Jetson AGX Orin, a high-performance industrial computing device. It featured a 128-core ARM CPU and a 275 TOPS GPU, and can operate stably in a temperature range from-40 to 60 °C, enabling low-latency (< 5 ms) data acquisition. Through GPU parallel computing, the training time of 15.5 h was reduced by 82% compared to a pure CPU environment. Moreover, the feature dimensions were streamlined for edge devices, reducing the inference power consumption to 15W, which met the requirements for energy efficiency and environmental adaptability in real-time regulation.
During the data preprocessing stage, the dataset utilized for training comprised historical traffic flow data gathered from various urban intersections. Linear interpolation was employed to fill in gaps in the data, ensuring continuity. Subsequently, the traffic flow data were standardized to a mean of 0 and a standard deviation of 1, thereby eliminating dimensional discrepancies. The dataset was segmented into 60-min time windows, and training samples were created using a sliding window approach to capture temporal features and predict traffic trends.
For model training, GPU acceleration and batch processing were utilized to expedite the learning process, complemented by early stopping techniques to prevent overfitting. The evaluation metrics encompassed mean square error (MSE), root mean square error (RMSE), mean absolute error (MAE), and the coefficient of determination (R2), which assessed prediction accuracy and model interpretability. The dataset used for evaluation comprised real-time traffic data from urban sensors and cameras, ensuring the model’s applicability in a dynamic environment.
To assess the robustness of the proposed control strategy, a sensitivity analysis is presented. It is acknowledged that formal methodologies like Global Sensitivity Analysis (GSA), which are rigorously applied in fields such as materials science and structural engineering, provide a powerful framework for quantifying the impact of uncertainties in model input parameters on performance outputs32,33. These methods excel at identifying the most influential internal model parameters, thereby guiding model refinement and calibration.
While a full GSA of the LTCOP-LSTM model’s hyperparameters is a valuable direction for future research, this study focuses the sensitivity analysis on a key operational parameter: the Electronic Toll Collection (ETC) penetration rate (γ). This parameter is external to the model’s architecture but is of critical importance for evaluating the strategy’s real-world effectiveness and scalability. Understanding the system’s performance under varying levels of technology adoption provides direct and actionable insights for transportation planners and policymakers.
To quantify the contribution of the key components within the proposed architecture and justify its design, a comprehensive ablation study was conducted; this study systematically evaluates the model’s performance by comparing the full LTCOP-LSTM model against its simpler variants, specifically LSTMS (Baseline Model), a standard LSTM network serving as the foundational model to assess the basic capabilities of recurrent networks on time-series data; LSTMS_MV (Intermediate Model), an enhanced model that incorporates multiple external variables (Multi-Variable) into the LSTM network, aiming to improve its capacity to capture traffic flow fluctuations; and LTCOP-LSTM (Proposed Full Model), the complete proposed model, which integrates the CEEMD, attention mechanism, and SAE-optimized features, designed to fully capture the dynamic characteristics of traffic flow, with the accuracy comparison from this ablation study depicted in Fig. 8.

Comparison of accuracy of different improved LSTM models in traffic flow classification tasks.
In Fig. 8(a), the accuracy of three distinct improved LSTM models progressively increased throughout the iteration process, with the LTCOP-LSTM model exhibiting the quickest growth in accuracy and attaining high accuracy in earlier iterations, indicating its superior performance in classification tasks. Figure 8(b) compares the accuracy improvements of three additional enhanced LSTM models. Likewise, the LTCOP-LSTM model demonstrated a more rapid increase in accuracy during iterations and ultimately reached the highest accuracy, further confirming its efficacy in addressing classification problems. The processing efficiency comparison of the LTCOP-LSTM model across various datasets is depicted in Fig. 9.

Comparison of processing efficiency of LTCOP-LSTM model on different datasets.
In Fig. 9 (a), METR-LA, as the processing time of the LTCOP-LSTM model increased, the execution time for the traffic flow prediction task was generally higher than that of the congestion reduction task, and both execution times exhibited a certain distribution range. Figure 9 (b) also illustrates a similar trend in PeMS, where the execution time for traffic flow prediction tasks was relatively long, but the distribution was more concentrated. In Fig. 9 (c), Taxi Trajectory, the execution time for the congestion reduction task was relatively short and concentrated, whereas the execution time for the traffic flow prediction task was relatively long and fluctuated significantly. Figure 9 (d), ULTRA, indicates that in the traffic flow prediction task, the execution time increased with the processing time of the LTCOP-LSTM model, while the execution time for the congestion reduction task remained relatively short. The error convergence curves of different models on various datasets are depicted in Fig. 10.

Error convergence curves of different models on different datasets.
In Fig. 10 (a) METR-LA, the error values of all models decreased rapidly with the increase in iteration times, among which the LTCOP-LSTM model exhibited the fastest decline. When the iteration count reached 80, its error value was already very low, approaching 0. The error values of GNNs and Transformer models decreased at a relatively slower pace, whereas the error values of CNN-LSTM models fluctuated significantly during the iteration process. However, the overall trend was one of reduction. Figure 10 (b) PeMS displays a similar pattern, with the LTCOP-LSTM model demonstrating the quickest error reduction rate and the lowest error value at 80 iterations. The error values of GNNs and Transformer models decreased slowly, while the error values of the CNN-LSTM model fluctuated but eventually stabilized. The performance comparison of the LTCOP-LSTM model with other traffic flow prediction models is presented in Table 1.
As indicated in Table 1, the LTCOP-LSTM model demonstrated the quickest processing time (25.34 s), higher resource utilization (78.4%), fewer hyperparameters (8), shorter training time (15.5 h), and the lowest regression loss (0.0237), achieving convergence in 120 iterations on the METR-LA dataset. On the PeMS dataset, LTCOP-LSTM similarly outperformed, with a processing time of 28.67 s, resource utilization of 80.1%, training time of 14.2 h, regression loss of 0.0195, and the fastest convergence speed, requiring only 110 iterations. For the Taxi Trajectory dataset, LTCOP-LSTM recorded the shortest processing time (22.45 s), the highest resource utilization rate (82.7%), the longest training time (16.2 h), yet the lowest regression loss (0.0188), and a convergence speed of 105 iterations. Lastly, on the ULTRA dataset, LTCOP-LSTM had a processing time of 26.88 s, resource utilization rate of 79.3%, training time of 14.5 h, regression loss of 0.0214, and convergence speed of 115 iterations.
Performance evaluation of LTCOP-LSTM model in different traffic scenarios
To evaluate the predictive performance of the LTCOP-LSTM model across various traffic scenarios, the model was applied to four distinct traffic datasets: METR-LA, PeMS, Taxi Trajectory, and ULTRA. These datasets encompassed different facets of urban transportation, such as highway, city road, and taxi trajectory data. During the experiment, the model underwent training and testing across various prediction time windows (10, 15, 20, 25, 30, and 35 min) to assess its accuracy at different time scales. Each dataset was divided into a training set and a testing set, with the former facilitating the model’s learning process and the latter used to gauge the model’s predictive capabilities. The prediction frequency was established at intervals of 30 s, 45 s, or 60 s to mimic potential update frequencies in real-time traffic management systems. The validation results of the LTCOP-LSTM model across the different scenarios are presented in Table 2.
As indicated in Table 2, using the METR-LA dataset, the 10-min predicted MAE was 5.613 vehicles, the RMSE was 7.844 vehicles, and the RMSRE was 3.87%. For the 30-min prediction, the MAE increased to 7.234 vehicles, the RMSE was 9.835 vehicles, and the RMSRE was 5.47%. On the PeMS dataset, the 15-min predicted MAE was 4.912 vehicles, the RMSE was 6.29 vehicles, and the RMSRE was 2.76%. The 10-min predicted MAE was 5.000 vehicles, the RMSE was 6.893 vehicles, and the RMSRE was 3.00%. For the Taxi Trajectory dataset, the 20-min predicted MAE was 6.721 vehicles, the RMSE was 9.301 vehicles, and the RMSRE was 4.12%. The 35-min predicted MAE was 8.146 vehicles, the RMSE was 10.568 vehicles, and the RMSRE was 4.78%. On the ULTRA dataset, the predicted MAE for a 25-min interval was 5.008 vehicles, the RMSE was 7.617 vehicles, and the RMSRE was 3.25%. The predicted MAE for a 15-min interval was 4.897 vehicles, the RMSE was 6.151 vehicles, and the RMSRE was 2.65%. The comparison of the utilization rate of urban expressway lanes before and after improvement is depicted in Fig. 11.

Comparison of urban expressway lane utilization before and after improvement.
Figure 11(a) illustrates the lane utilization before enhancements, whereas Fig. 11(b) depicts the lane utilization post-improvements. In these two subgraphs, the horizontal axis corresponds to time (in hours), and the vertical axis signifies the actual number of lanes utilized. The scatter point distribution revealed alterations in lane usage across various time frames. Figure 11(a) indicates that throughout the day, there were periods of lower lane utilization rates, potentially linked to traffic flow fluctuations. Conversely, Fig. 11(b) demonstrates that following the implementation of improvement strategies, the lane utilization rate during peak hours increased, suggesting that these measures effectively enhanced lane utilization efficiency. The performance analysis of the LTCOP-LSTM model for traffic flow prediction across different time intervals is presented in Table 3.
As indicated in Table 3, from midnight to 8am, the traffic flow increased from 1500 vehicles/h to 2400 vehicles/h and subsequently decreased to 1750 vehicles/h. The model latency fluctuated between 12.34 and 19.38 s, correlating with traffic volume and processing efficiency. In the 0–1 h period, the model experienced a delay of 12.34 s at low traffic, with an error fluctuation of 6.78 vehicles and a processing efficiency of 92.5%. During the 1–2 h period, traffic increased to 1800 vehicles per hour, resulting in a delay of 15.22 s, and a slight decrease in efficiency to 91.0%. In the 2–3 h period, traffic decreased to 1600 vehicles per hour, with a delay of 14.85 s, and an increase in efficiency to 93.4%. For the 3–4 h period, traffic increased to 2000 vehicles per hour, with a delay of 17.46 s and an efficiency of 89.0%. From 4 to 5 h, with a flow rate of 2200 vehicles per hour, a delay of 16.78 s, and an efficiency of 88.5%. During the 5–6 h period, at the highest traffic, a delay of 19.38 s, and an efficiency of 87.5%. In the 6–7 h period, traffic decreased to 1950 vehicles/h, with a delay of 13.55 s and an efficiency of 90.4%. Finally, in the 7–8 h period, with a flow rate of 1750 vehicles/h, a delay of 15.90 s, and an efficiency of 91.6%. The complexity of feature engineering and the number of input features varied over time to adapt to different traffic conditions. The performance analysis of the LTCOP-LSTM model in different prediction scenarios is detailed in Table 4.
As indicated in Table 4, the model exhibited a low latency of 9.67 s in the short-term prediction (15 min), processing a traffic flow of 1600 vehicles per hour and achieving a prediction stability of 90.4%. The mid-term (30 min) and long-term (60 min) predictions experienced delays of 14.32 s and 20.88 s, respectively, with a slight decrease in stability to 86.7% and 82.1%. The adaptive prediction (45 min) attained 88.6% stability with a delay of 15.01 s. In a high dynamic environment (20-min prediction), despite data variability reaching 25%, the model sustained 79.3% stability, albeit with a delay of 18.55 s. Conversely, in the low dynamic environment (30-min prediction), the model demonstrated the highest stability at 91.5% and the lowest data variability at 8.7%. During peak hours (10-min forecast), the model managed a high traffic volume of 2500 vehicles per hour with a stability of 75.9%, while during off-peak hours (50-min forecast), it maintained a stability of 87.2%. The frequency of model updates and the proportion of feature selection were tailored according to scene requirements to enhance predictive performance. The experiment was conducted on urban highways in the city, encompassing sections with three main exits that experience high traffic volume and density. The daily traffic flow in the study area averaged around 1500 vehicles per hour, and this stretch of road typically suffered from severe traffic congestion during peak hours. The evaluation of optimization results in real-world traffic environments is presented in Table 5.
As shown in Table 5, significant results were achieved after the implementation of the traffic optimization strategy. The average traffic flow increased by 8.57%, from 1453.72 vehicles/h to 1578.41 vehicles/h, effectively improving the traffic diversion capacity. The congestion duration on urban highways was reduced from 42.68 to 18.23 min, significantly improving traffic flow. The lane utilization rate increased from 58.47 to 72.93%, an increase of 14.46%, and the efficiency of road resource utilization was optimized. Meanwhile, the prediction accuracy of the LSTM model increased from 87.14 to 91.37%, enabling more accurate prediction of traffic flow and lane control. The calculation time and lane allocation response time decreased, and the system throughput increased from 2.48 vehicles/second to 3.05 vehicles/second, an increase of 22.58%, further enhancing road traffic capacity. The fluctuation of traffic flow decreased from 13.42 to 8.57%, indicating a significant improvement in traffic stability. In addition, the traffic congestion at the exit of the highway was effectively alleviated, and the travel experience was significantly improved. The cross-dataset generalization validation is shown in Table 6.
The results in Table 6 showed that the processing time of the LTCOP-LSTM model on the NYC-Traffic Dataset and the original dataset was 27.12 s and 25.84 s, respectively, the resource utilization was 76.3% and 79.6%, and the regression loss was 0.0251 and 0.0213, respectively. The processing time of the ARIMA model was 34.56 s and 32.28 s, the resource utilization was 68.2% and 68.9%, and the regression loss was 0.0487 and 0.0474, respectively. The processing time of the RF model was 36.15 s and 33.39 s, the resource utilization was 65.7% and 65.2%, and the regression loss was 0.0412 and 0.0401, respectively. Overall, LTCOP-LSTM performed best in terms of processing time and regression loss, while RF performed second in terms of processing time and resource utilization. The processing time and regression loss of the ARIMA model were relatively high. The extreme scenario tests are shown in Table 7.
Table 7 shows the test results under different extreme scenarios. In the normal scenario, the MAE was 5.008 vehicles, the RMSE was 7.617 vehicles, and the prediction stability was 91.5%. in the sudden accident scenario, the MAE was 7.842 vehicles, the RMSE was 10.235 vehicles, and the prediction stability was 81.3%; in the heavy rain scenario, the MAE was 6.975 vehicles, the RMSE was 9.568 vehicles, and the prediction stability was 83.7%. The traffic performance (sensitivity analysis) under different ETC penetration rates is shown in Table 8.
Table 8 presents a sensitivity analysis conducted to evaluate the impact of the ETC penetration rate (γ) on key traffic performance indicators. The results reveal a strong, positive relationship between higher ETC adoption and improved traffic efficiency. Specifically, as the penetration rate increases from 30 to 90%, there is a substantial improvement across all metrics: average delay per vehicle decreases by 52.3% (from 61.4 to 29.3 s), congestion duration is reduced by 62.3% (from 38.5 to 14.5 min), and system throughput increases by 26.2% (from 1340 to 1691 veh/hr). This analysis confirms the robustness of the proposed control strategy and indicates that its benefits are significantly amplified in environments with higher public adoption of ETC technology. The confidence intervals and significance tests (statistical analysis) of key indicators are shown in Table 9.
The Table 9 presents the statistical analysis of key traffic metrics comparing baseline and proposed methods. For congestion duration, the proposed method reduced it from 42.7 to 18.2 min, with a 95% CI of [16.4, 19.6] and a p value < 0.001. Lane utilization increased from 58.5 to 72.9% (95% CI [70.1, 75.8], p value < 0.001). Throughput rose from 1454 to 1578 veh/hr (95% CI [1552, 1605], p value 0.003). Travel time decreased from 36.8 to 31.6 min (95% CI [30.4, 32.5], p value 0.007). All improvements were statistically significant. The emission impact assessment (based on the simplified VT-Micro model) is shown in Table 10.
The Table 10 shows the emission impact assessment comparing baseline and proposed strategy. CO2 emissions decreased from 226.5·veh to 206.2 g/km·veh, a reduction of 8.96%. NOx emissions dropped from 0.347·veh to 0.308 g/km·veh, down by 11.25%. Fuel consumption reduced from 8.12 L/100 to 7.32 L/100 km, a 9.85% decrease. Idle time per vehicle fell from 47.5 to 28.3 s, a significant drop of 40.42%.
Discussion
The LTCOP-LSTM model demonstrated significant advancements in traffic flow prediction and dynamic lane regulation, achieving a regression loss of 0.0237 on the METR-LA dataset, 47.7% lower than traditional ARIMA models. This improvement stemmed from integrating CEEMD decomposition and attention mechanisms, enabling capture of both short-term fluctuations (90.4% stability in 15-min predictions) and long-term trends (82.1% stability in 60-min predictions). Real-world deployment results validated practical impact, with 14.46% increase in highway lane utilization and 57.3% reduction in congestion duration. Crucially, the performance gains are not only evident when compared to a static lane allocation strategy but also hold when benchmarked against a more sophisticated, classic adaptive control model based on queue-length thresholds. While the threshold-based controller can react to existing congestion by opening more lanes, it is fundamentally a reactive mechanism. The LTCOP-LSTM model’s superior performance stems from its predictive capability. By forecasting impending traffic demand surges, it can proactively adjust lane configurations before excessive queues form, thereby preventing the onset of severe congestion rather than merely mitigating it after it has occurred.
A key aspect of the contribution lies in the implementation of "collaborative optimization." The framework moves beyond simple reactive feedback by incorporating an integrated dynamic model of the highway-urban road interface. Collaboration is achieved not by treating urban traffic conditions as external inputs, but by actively modeling the urban-side queue as an endogenous state variable. The control algorithm’s decisions directly influence the evolution of this queue state, as defined in the system’s state-transition equations.
This approach constitutes a form of integrated management, where the optimization process must foresee the consequences of its actions on both the highway mainline and the connecting urban arterial. It creates a closed-loop system where the control strategy is optimized based on a unified model that captures the coupled dynamics of both domains. While this form of integration differs from multi-modal control strategies that might also optimize urban traffic signals, it establishes a robust and computationally tractable method for managing cross-network impacts at critical infrastructure bottlenecks. This explicit modeling of the dynamic trade-offs is fundamental to preventing the simple transference of congestion and genuinely balancing the performance of both the urban and highway systems.
However, critical limitations emerge. First, performance degraded under high-dynamic conditions, with stability dropping to 79.3% when data variability exceeded 25%, indicating vulnerability to sudden surges or accidents. Second, computational complexity remained challenging, requiring 15.5 h of training time on large datasets, potentially hindering scalability. Hardware cost analysis revealed cloud training on NVIDIA A100 GPUs incurred $24/h, while edge deployment on Jetson AGX Orin reduced inference costs to $0.05/h. Third, the framework relied on static environmental assumptions and lacked real-time adaptation to weather variations or roadwork. Real-time constraint testing showed 1711 vehicles/s throughput with 18.7 ms latency for 1024-dimensional inputs on Intel Xeon Platinum 8375C CPUs, but struggled with 2048-dimensional data (632 vehicles/s throughput). Lastly, generalizability to mixed-autonomy traffic environments remained untested.
A key direction for future research is to investigate the network-level impacts of the proposed localized lane control, particularly on driver route choice. The current study assumes static traffic assignment to isolate the algorithm’s direct performance at the bottleneck. Future work should integrate the control module into a network-scale simulation that incorporates dynamic route choice models. This would allow for a crucial analysis of driver behavioral adaptation and potential traffic redistribution, providing a more holistic assessment of the strategy’s system-wide effectiveness.
Another valuable avenue for future work is the formal integration of the proposed control strategy with a Dynamic Traffic Assignment (DTA) framework. Without such a framework, the reported performance gains risk being localized and may not fully capture long-term network dynamics. Future research should therefore focus on coupling the lane control logic with a DTA model to study the interaction between infrastructure control and evolving traffic patterns. This will be essential to validate the sustainability and true network-wide benefits of the control strategy beyond the localized context.
To overcome the existing limitations, three strategic approaches were put forward. Firstly, it is proposed to develop adaptive error-correction mechanisms that leverage online learning methods. This aims to bolster the system’s robustness in the face of high variability. Secondly, efforts will be made to optimize the algorithmic architecture. This involves designing lightweight models and integrating edge computing, with the goal of minimizing computational overhead. Thirdly, the datasets will be expanded to encompass multi-source environmental factors, such as weather conditions and roadwork, as well as mixed-autonomy traffic scenarios. This expansion is intended to enhance the generalizability of the solutions.
Furthermore, a valuable direction for future work is to conduct a comparative analysis with urban ETC deployment studies from other regions. This would involve developing a standardized simulation framework capable of normalizing for regional differences in tolling policies, infrastructure, and driver behavior. Such a study would be instrumental in assessing the global transferability of the proposed dynamic control model and identifying best practices for intelligent lane management.
Conclusion
The study proposed a collaborative optimization strategy for urban highways and roads based on ETC lane regulation, targeting the key challenge of traffic congestion in urban traffic management. This is achieved not by actively controlling urban traffic, but by implementing a dynamic lane regulation strategy at highway on-ramps that incorporates real-time feedback and penalties for queue spillback onto the urban road network, thereby balancing the operational needs of both systems. The research methods included in-depth analysis of the ETC lane regulation mechanism, construction of a comprehensive urban expressway and urban road collaborative optimization model, and use of LSTM algorithm to predict traffic flow. The research results indicated that the LTCOP-LSTM model could maintain high stability and low latency in different prediction scenarios. In short-term forecasting, the average traffic flow of the model was 1600 vehicles per hour, and the prediction stability was as high as 90.4%. In long-term forecasting, although the prediction time window was extended to 60 min, the model could still maintain 82.1% stability, with an average traffic flow of 1400 vehicles per hour. In high dynamic environments, the stability of the model was 79.3%, while in low dynamic environments, the stability increased to 91.5%. Although the LTCOP-LSTM model performed well in research, there are still some shortcomings. The research suffered from insufficient generalization verification, lack of extreme scenario testing, and limited experimental comparisons, and it did not fully consider real-world deployment costs and real-time constraints. Future work should further optimize model robustness and conduct long-term validation in real road networks.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Orieno, H., Ndubuisi, N. L., Ilojianya, V. I., Biu, P. W. & Odonkor, B. The future of autonomous vehicles in the US urban landscape: A review: Analyzing implications for traffic, urban planning, and the environment. Eng. Sci. Technol. J. 5(1), 43–64. https://doi.org/10.51594/estj.v5i1.721 (2024).
Okada, Y. et al. Road traffic noise prediction model. Inter-Noise and Noise-Con Congr. Conf. Proc. 270(2), 9861–9870. https://doi.org/10.3397/IN_2024_4310 (2024).
Gao, Z., Huang, H. J., Guo, J., Yang, L. & Wu, J. Future urban transport management. Front. Eng. Manage. 10(3), 534–539. https://doi.org/10.1007/s42524-023-0255-3 (2023).
Dai, R., Ding, C., Wu, X., Yu, B. & Lu, G. “Coupling control of traffic signal and entry lane at isolated intersections under the mixed-autonomy traffic environment”,IEEE Trans. Intell. Transp. Syst. 24(10), 10628–10642. https://doi.org/10.1109/TITS.2023.3280953 (2023).
Chen, H., Wu, W., Zhang, S., Wu, C. & Zhong, R. A GNSS/LiDAR/IMU pose estimation system based on collaborative fusion of factor map and filtering. Remote Sens. 15(3), 790–810. https://doi.org/10.3390/rs15030790 (2023).
Hu, J. et al. “CACC simulation platform designed for urban scenes”,IEEE Trans. Intell. Veh. 8(4), 2857–2874. https://doi.org/10.1109/TIV.2023.3234890 (2023).
Chen, Y. Li, C. Huang, Y. Xing, D. Tian, L. Li, Z. Hu, S. Teng, C. Lv, J. Wang, D. Cao, N. Zheng, and F. Wang, “Milestones in autonomous driving and intelligent vehicles—Part I: Control, computing system design, communication, HD map, testing, and human behaviors,”IEEE Trans. Syst., Man, Cybern. Syst., vol. 53, no. 9, pp. 5831–5847, May. 2023, https://doi.org/10.1109/TSMC.2023.3276218.
Singal, G. et al. RoadWay: Lane detection for autonomous driving vehicles via deep learning. Multimed. Tools Appl. 82(4), 4965–4978. https://doi.org/10.1109/ICRA57147.2024.10611720 (2023).
Zhou, X., Shen, H., Wang, Z., Ahn, H. & Wang, J. “Driver-centric lane-keeping assistance system design: A noncertainty-equivalent neuro-adaptive control approach”,IEEE/ASME Trans. Mechatron. 28(6), 3017–3028. https://doi.org/10.1109/TMECH.2023.3236245 (2023).
Peng, J., Shangguan, W. & Chai, L. Strategy of lane-changing coupling process for connected and automated vehicles in mixed traffic environment. Transpmetrica B: Transp. Dyn. 11(1), 979–995. https://doi.org/10.1080/21680566.2022.2154288 (2023).
Wu, S. et al. Hierarchical cooperative eco-driving control for connected autonomous vehicle platoon at signalized intersections. IET Intell. Transp. Syst. 17(8), 1560–1574. https://doi.org/10.1049/itr2.12346 (2023).
Samuel, M. et al. Evaluating the performance of fuzzy-PID control for lane recognition and lane-keeping in vehicle simulations. Electron. 12(3), 724–735. https://doi.org/10.3390/electronics12030724 (2023).
Bhat, A., Bhanuranjan, S. B., Narayan, K. L. & Lavanya, N. L. Survey on object detection, face tracking, digital mapping and lane following for remotely piloted aerial systems (RPAS). Int. J. Hum. Comput. Intell. 2(2), 94–105. https://doi.org/10.5281/zenodo.7900522 (2023).
Guo, L. et al. “Co-optimization of speed planning and power management for automated HEVs in unstructured road scenarios”,IEEE Trans. Transp. Electr. 10(1), 1628–1641. https://doi.org/10.1109/TTE.2023.3281274 (2023).
Louati, A. & Kariri, E. Enhancing intersection performance for tram and connected vehicles through a collaborative optimization. Sustain. 15(12), 9231–9248. https://doi.org/10.3390/su15129231 (2023).
Zhou, S., Shi, T., Li, S., Dong, Y. & Sun, J. The impact of urban morphology on multiple ecological effects: Coupling relationships and collaborative optimization strategies. Build. Simul. 16(8), 1539–1557. https://doi.org/10.1007/s12273-023-1057-6 (2023).
Zhang, S. et al. Longitudinal and lateral control strategies for automatic lane change to avoid collision in vehicle high-speed driving. Sens. 23(11), 5301–5321. https://doi.org/10.3390/s23115301 (2023).
Ulvi, H., Yerlikaya, M. A. & Yildiz, K. Urban traffic mobility optimization model: A novel mathematical approach for predictive urban traffic analysis. Appl. Sci. 14(13), 5873–5895. https://doi.org/10.3390/app14135873 (2024).
Sana, F., Azad, N. L. & Raahemifar, K. Autonomous vehicle decision-making and control in complex and unconventional scenarios—a review. Mach. 11(7), 676–705. https://doi.org/10.3390/machines11070676 (2023).
Ghorbani, E. et al. Optimizing energy consumption in smart cities’ mobility: Electric vehicles, algorithms, and collaborative economy. Energies 16(3), 1268–1285. https://doi.org/10.1007/s11276-023-03541-z (2023).
Garg, M. & Bouroche, M. “Can connected autonomous vehicles improve mixed traffic safety without compromising efficiency in realistic scenarios?”IEEE Trans. Intell. Transp. Syst. 24(6), 6674–6689. https://doi.org/10.1109/TITS.2023.3238889 (2023).
Moradi, M. & Assaf, G. J. Designing and building an intelligent pavement management system for urban road networks. Sustain. 15(2), 1157–1174. https://doi.org/10.3390/su15021157 (2023).
Liu, H., Liu, C., Hao, L. & Zhang, D. Stability analysis of lane-keeping assistance system for trucks under crosswind conditions. Appl. Sci. 13(17), 9891–9906. https://doi.org/10.3390/app13179891 (2023).
A. Ziar, S. Ulfat, Z. Serat, and M. A. Armal, “Cost-effectiveness analysis of design methods for rigid and flexible pavement: A case study of urban road,”Arch. Adv. Eng. Sci., vol. 2, no. 3, pp. 134–141, Aug. 2024, https://doi.org/10.47852/bonviewAAES32021264.
P. Yadav, A. Mishra, and S. Kim, “A comprehensive survey on multi-agent reinforcement learning for connected and automated vehicles,”Sens., vol. 23, no. 10, pp. 4710–4735, May. 2023, https://doi.org/10.3390/s23104710.
Liu, Q., Gordon, T. & Rahman, S. Model-free autonomous control of four-wheel steering using artificial flow guidance. Veh. Syst. Dyn. 62(6), 1565–1586. https://doi.org/10.1080/00423114.2023.2276761 (2024).
Zhang, W., Song, Y., Zhou, G., Song, Z. & Xi, C. Multiobjective-based decision-making for the optimization of an urban passenger traffic system structure. Sustain. 15(18), 13644–13664. https://doi.org/10.3390/su151813644 (2023).
Yang, R. et al. Finite element analysis and optimization of hydrogen fuel cell city bus body frame structure. Appl. Sci. 13(19), 10964–10983. https://doi.org/10.3390/app131910964 (2023).
Dornelas, R. S. & Lima, D. A. Correlation filters in machine learning algorithms to select demographic and individual features for autism spectrum disorder diagnosis. J. Data Sci. Intell. Syst. 3(1), 7–9. https://doi.org/10.47852/bonviewJDSIS32021027 (2023).
Fang, X., Péter, T. & Tettamanti, T. Variable speed limit control for the motorway–urban merging bottlenecks using multi-agent reinforcement learning. Sustain. 15(14), 11464–11479. https://doi.org/10.3390/su151411464 (2023).
Barth, M. & Boriboonsomsin, K. Real-world carbon dioxide impacts of traffic congestion. Transp. Res. Rec. 2058(1), 163–171 (2008).
Owais, M. & Moussa, G. S. Global sensitivity analysis for studying hot-mix asphalt dynamic modulus parameters. Constr. Build. Mater. 413, 134775 (2024).
Idriss, L. K. & Owais, M. Global sensitivity analysis for seismic performance of shear wall with high-strength steel bars and recycled aggregate concrete. Constr. Build. Mater. 411, 134498 (2024).
Author information
Authors and Affiliations
Contributions
Z.D.Z. processed the numerical attribute linear programming of communication big data, and the mutual information feature quantity of communication big data numerical attribute was extracted by the cloud extended distributed feature fitting method. Z.Y.R. combined with fuzzy C-means clustering and linear regression analysis, the statistical analysis of big data numerical attribute feature information was carried out, and the associated attribute sample set of communication big data numerical attribute cloud grid distribution was constructed. Z.D.Z. and Z.Y.R. did the experiments, recorded data, and created manuscripts. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhong, Z., Ren, Z. Collaborative optimization strategy for urban highways and roads based on electronic toll collection lane regulation. Sci Rep 15, 33286 (2025). https://doi.org/10.1038/s41598-025-18284-4
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-18284-4
