
Abstract
Designing stable wellbore trajectories in heterogeneous formations remains difficult because geological uncertainty and mechanical constraints interact in non-linear ways. We present an integrated geomechanical–drill string framework that departs from conventional geometry-based or single-physics approaches in three aspects: (i) formation feasibility is encoded through a probability corridor and high-risk mask derived from multi-source logs, enabling uncertainty-aware constraint enforcement; (ii) geomechanical and drill string responses are coupled into a unified objective–constraint structure; and (iii) a hybrid global–local optimization strategy efficiently resolves the resulting non-convex search space. Applied to a shale–sandstone interval in Sichuan–Chongqing, the method consistently avoids unstable zones, suppresses curvature concentration, and maintains compliance with pressure-window and mechanical limits. The results demonstrate a robust and deployment-ready trajectory design paradigm for complex formations.
Similar content being viewed by others
Introduction
Wellbore trajectory design is a critical determinant of drilling safety and reservoir development efficiency1, especially in structurally complex and mechanically heterogeneous formations2. An optimized trajectory enables safe navigation through unstable intervals, improves reservoir contact, and enhances ultimate hydrocarbon recovery3. However, structural deformation, lithological heterogeneity, and the dynamic evolution of in-situ stresses jointly complicate the design process4. Deviations from the safe pressure window may trigger severe instability events—including borehole collapse, tight-hole conditions, or stuck-pipe failures—that undermine drilling performance and operational continuity5.
Conventional trajectory design strategies typically rely on geometric simplifications or empirical correlations6,7. These methods often assume laterally continuous and homogeneous formations8, and therefore struggle to respond to abrupt geological contrasts or localized stress anomalies encountered during drilling9. Moreover, early design frameworks emphasize geometric smoothness—such as minimizing curvature or dogleg severity—while lacking explicit mechanical evaluation of wellbore stability10. The absence of a coupled formation–wellbore interaction model introduces significant risks in anisotropic, fractured, or highly stress-sensitive reservoirs11,12. Field practice in the shale and carbonate formations of southwestern China has repeatedly demonstrated that such limitations can lead to trajectory deviation, excessive dogleg severity, and mechanical failures under complex stress regimes13.
To overcome the limitations of purely geometric or empirical approaches, recent research has increasingly focused on integrating geological, geomechanical, and operational constraints into trajectory planning14,15. Many studies now highlight the importance of explicitly incorporating geomechanical factors—such as formation stress, rock strength, and pore pressure—into trajectory optimization frameworks16,17. Multi-objective optimization strategies have also been developed to balance competing design goals, including wellpath length, curvature smoothness, and mechanical feasibility under complex formation conditions18. For example, the combination of geostatistical modeling with rock-mechanical analysis improves the identification of stress-sensitive intervals, while integrated geological–mechanical evaluation provides a more realistic assessment of trajectory feasibility under variable pressure and thermal gradients19. Despite these advances, most existing methods still rely on static or deterministic representations of stress fields and formation properties, limiting their adaptability and increasing uncertainty in heterogeneous or structurally disturbed geological settings.
Parallel to academic advances, industrial developments—including rotary steerable systems (RSS) and real-time geosteering—have substantially enhanced downhole trajectory execution accuracy20. Modern software environments integrate 3D geological modeling with mechanical analysis, enabling collaborative trajectory design between geoscientists and engineers under shared geomechanical constraints21. Yet, even with these intelligent and data-rich systems, the absence of a unified methodology that simultaneously captures formation heterogeneity, mechanical response, and probabilistic uncertainty remains a critical gap in current practice.
In this context, there is a pressing need for a physics-informed and uncertainty-aware trajectory design method capable of quantitatively coupling geological structures, mechanical constraints, and dynamic risk factors22. To address this gap, the present study introduces an integrated geomechanical–drill string trajectory optimization framework for initial wellbore trajectory design in complex structural settings. The proposed approach unifies geological modeling, drill string statics, and probabilistic risk characterization within a single optimization structure, establishing analytical linkages among formation stress distribution, rock strength, and wellbore curvature23.
A high-precision geomechanical modeling framework is constructed to characterize formation stress redistribution, pore-pressure variation, and anisotropic strength behavior across heterogeneous intervals24. Curvature (κ) and dogleg severity (DLS) are embedded as geometric–mechanical constraints, enabling quantitative evaluation of wellbore stability and trajectory feasibility within a unified structural–mechanical context25. In parallel, Bayesian probability updating is employed to iteratively refine formation and risk estimations using real-time or offset-well information, thereby linking deterministic geomechanical calculations with probabilistic uncertainty quantification26.
Trajectory parameterization is implemented using a B-spline representation, which provides high flexibility for curve shaping and ensures smooth transitions across geometric and geomechanical constraint boundaries27,28. The optimization problem is solved using a hybrid intelligent strategy that combines global search with adaptive local refinement, achieving strong convergence performance while maintaining computational tractability29. The multi-objective cost function jointly optimizes wellbore length1, curvature smoothness, and mechanical stability margin, ensuring that the resulting trajectory satisfies the integrated geological, geomechanical, and operational constraints30.
A field application in the Sichuan–Chongqing region—characterized by interbedded shale–sandstone sequences and complex fold structures—is used to assess the performance of the proposed framework. Relative to baseline designs, the optimized trajectory reduces average wellbore length by 7.1%, maximum dogleg severity by 35.4%, and penetration through high-risk intervals by 64%, while increasing reservoir exposure by 18.1%. Robustness analysis under varying weight configurations and input perturbations demonstrates a 33.9% improvement in the stability index, confirming the method’s resilience to geological uncertainty and model variability.
The major innovations of this study are summarized as follows:
-
(1)
Integrated geological–geomechanical representation: A unified 3D formation model incorporating heterogeneity, structural interfaces, and in-situ stress conditions provides consistent environmental constraints for trajectory planning.
-
(2)
Mechanically informed curvature and stability evaluation: A quantitative formulation links curvature behavior, drill string deformation, and pressure–stress limits, enabling direct identification of mechanically admissible trajectory segments.
-
(3)
Unified feasibility domain: Geometric, geomechanical, and probabilistic constraints are consolidated into a single mathematical feasibility domain that defines admissible trajectories and ensures consistency across constraint sources.
-
(4)
Robust multi-objective optimization strategy: A hybrid global–local optimization procedure simultaneously reduces trajectory length and curvature, enhances stability margins, and improves adaptability to formation uncertainty.
Collectively, the proposed framework establishes a unified and transferable foundation for intelligent wellbore trajectory optimization, bridging geological modeling, geomechanical analysis, and probabilistic risk characterization. Beyond advancing the understanding of formation–mechanics interactions, the method offers practical guidance for safe and efficient drilling in geologically complex environments.
Methodology
An integrated geomechanical–drill string framework is developed for the initial design of wellbore trajectories in geologically complex formations. Unlike geometry-based or empirically derived approaches, the proposed method establishes a unified formulation that combines formation-structure modeling, drill string mechanical response, and data-driven uncertainty characterization. The framework evaluates formation–wellbore interactions by jointly considering stress redistribution, pore-pressure variation, and mechanically admissible curvature behavior, thereby quantifying the stability limits that govern feasible trajectory propagation. To address the uncertainty inherent in heterogeneous formations, a probabilistic modeling module is incorporated to assimilate offset-well information and refine interval-scale risk estimates through Bayesian updating. This enables adaptive assessment of penetration probability, confidence level, and instability risk along the evolving trajectory. Collectively, the integrated framework forms a closed-loop process—linking geological constraints, mechanical feedback, and trajectory optimization—allowing balanced adaptation between geological feasibility and mechanical integrity during the design stage.
Formation-constrained modeling
Horizon identification driven by offset-well data
Accurate identification of the top and bottom boundaries of the target reservoir, together with the characterization of intra-layer heterogeneity31,32, is a fundamental prerequisite for wellbore-trajectory design1. This is particularly critical in areas with limited offset-well data, where precise correlation and stratigraphic extension based on multi-well logs are essential for formation modeling and trajectory optimization33.
To this end, a neighbor-well-driven formation-interface recognition method is proposed, integrating multi-attribute log fusion, inter-well similarity analysis, and similarity-weighted interpolation to achieve intelligent identification and spatial reconstruction of reservoir boundaries.
Multi-well logging data—including gamma ray (GR), acoustic travel time (AC), and resistivity (RT)—are fused to construct a composite discrimination function
where \(\:G{R}_{k}^{*},A{C}_{k}^{*},R{T}_{k}^{*}\)represent normalized curve values, and \(\:\alpha\:,\beta\:,\gamma\:\)are weighting coefficients determined by the sensitivity of each attribute to lithologic variation. The inflection points of \(\:{F}_{k}\left(z\right)\)usually correspond to formation tops and bottoms.

Workflow of multi-well log fusion and formation interface recognition.
As shown in Fig. 1, the fused function \(\:F\left(z\right)\)derived from multi-well logs is used to identify stratigraphic boundaries. Subsequently, inter-well similarity coefficients \(\:{S}_{ij}\) (Eq. 2) are computed to ensure consistent layer correlation among wells, and similarity-weighted interpolation (Eq. 3) is performed to reconstruct continuous regional top and bottom surfaces of the reservoir.
To ensure consistency in layer identification between wells, a multi-attribute similarity coefficient \(\:{S}_{ij}\) is introduced to quantify the degree of stratigraphic correspondence:
where \(\:{f}_{i,m}\left(z\right)\) denotes the \(\:{m}^{th}\) logging attribute of well \(\:i\) at depth \(\:z\), and \(\:M\) is the number of curves used. A value of \(\:{S}_{ij}\) approaching 1 indicates a strong stratigraphic correspondence between the two wells.
Using \(\:{S}_{ij}\)as spatial weighting, a weighted interpolation algorithm is applied to generate the regional formation surfaces:
where \(\:{H}_{t,i}\)is the top depth of the \(\:{i}^{th}\)well, serving as a geometric constraint for trajectory design; \(\:{d}_{i}\)is the distance between the interpolation point and well \(\:i\); and \(\:p\)is the spatial attenuation factor. This formulation ensures both geological plausibility and spatial continuity in the reconstructed top and bottom surfaces.
The proposed method exhibits three main advantages:
-
(1)
Enhanced robustness in heterogeneous formations through GR–AC–RT multi-attribute fusion.
-
(2)
Improved inter-well consistency by introducing a similarity-based stratigraphic constraint.
-
(3)
Geologically continuous structural reconstruction via similarity-weighted interpolation, providing reliable boundary conditions for subsequent wellbore-trajectory optimization.
Structural geometric constraints
In complex geological settings, the feasibility of wellbore trajectories is strongly constrained by fault geometry and in-situ stress distribution34,35. The intersection of these structural and mechanical factors governs whether a given trajectory can remain stable within the target formation36. In this study, a structural–mechanical coupling model is established, which integrates formation geometry, stress field configuration, and fault orientation to define the integrated feasibility domain for wellbore trajectories.
The fault plane is considered a geometric boundary that limits the spatial continuity of a trajectory. Its plane can be expressed as:
where \(\:A,B,C\)represent the direction cosines of the fault-plane normal vector \(\:{\mathbf{n}}_{f}=(A,B,C)\), and \(\:(x,y,z)\)denote the wellbore coordinates in 3D space.
For a trajectory to remain on the same side of the fault plane as the target formation, it must satisfy the inequality:
If the condition is violated, the trajectory is deemed infeasible within the structural domain.
The target layer can be represented by a sinusoidal or folded surface:
where \(\:{H}_{0}\)is the mean depth of the formation, \(\:{A}_{\text{s}\text{i}\text{n}}\)is the structural amplitude, \(\:{k}_{x},{k}_{y}\)denote the spatial wave numbers along the x- and y-directions, and \(\:\varphi\:\)is the phase angle.
This formulation captures the undulating geometry of folded or faulted formations, ensuring that trajectory design aligns with the formation’s geometric continuity and avoids high-curvature or stress-concentrated zones.
The effective stress tensor in the wellbore coordinate system is defined by the transformation:
where \(\:R(\theta\:,\varphi\:)\)is the rotation matrix associated with wellbore inclination \(\:\theta\:\)and azimuth \(\:\varphi\:\), and \(\:\sigma\:\)represents the in-situ stress tensor.
This transformation enables stress components to be projected into the wellbore reference frame, facilitating quantitative assessment of the stress–trajectory coupling and ensuring mechanical stability against collapse or fracturing.
As shown in Fig. 2, the spatial intersection of the fault geometry, stress field, and target layer defines the integrated feasibility domain within which the trajectory satisfies both geological and mechanical constraints. Mathematically, this domain can be expressed as:
where \(\:{{\Omega\:}}_{\text{target}}\)represents the target formation domain,\(\:{{\Omega\:}}_{\text{fault}}\)denotes the fault-affected region, and \(\:{{\Omega\:}}_{\text{safe}}\)specifies the allowable stress field range satisfying rock-strength and wellbore stability criteria37.
The overlap of these three sub-domains defines the geomechanically feasible space for trajectory design under coupled structural–stress constraints.

Integrated structural–geomechanical constraints defining the feasible domain of wellbore trajectories.
The figure illustrates the geometric interaction among the target layer, fault plane, and stress field. The feasible trajectory (red curve) lies within the stability envelope where geological continuity and stress safety are simultaneously satisfied.
Real-time logging constraints and probabilistic modeling
During drilling operations, real-time logging-while-drilling (LWD/MWD) data can capture the dynamic variation of formation properties as the bit advances, enabling in-situ recognition of lithologic transitions and reservoir boundaries38,39. To ensure trajectory stability and adaptive adjustment, this study establishes a Bayesian updating-based formation recognition model driven by real-time log responses, as illustrated in Fig. 3.

Real-time logging constraint–based Bayesian updating framework.
The proposed framework integrates three coupled modules—formation similarity evaluation, Bayesian updating, and probability-based detection—to achieve reliable real-time identification of the target interval and mitigate deviation risk during trajectory execution.
To assess the degree of correspondence between real-time measurements and reference reservoir characteristics, a multi-attribute similarity function is defined as:
where \(\:G{R}_{i,t}\)and \(\:R{T}_{i,t}\)are the measured gamma-ray and resistivity values at depth \(\:z\)and time \(\:t\); \(\:G{R}_{i}^{0}\)and \(\:R{T}_{i}^{0}\)denote the corresponding reference responses of the target formation;\(\:{\sigma\:}_{i}\)is the standard deviation of each attribute; and \(\:N\)represents the number of logging attributes used for fusion. The resulting \(\:{P}_{\text{form}}(z,t)\)describes the similarity probability between the real-time log response and the target lithologic signature, where higher values indicate a closer match and improved stratigraphic confidence.
As drilling progresses, newly acquired measurements are continuously incorporated into the prior probability distribution through Bayesian inference:
where \(\:{H}_{j}\)represents the \(\:{j}^{th}\)formation hypothesis (e.g., shale, sandstone), \(\:{D}_{t}\)denotes the observed data at time \(\:t\), \(\:P\left({H}_{j}\right)\)is the prior probability of formation \(\:j\), and \(\:P({D}_{t}\mid\:{H}_{j})\)is the likelihood of observing the current log data given that formation.
The posterior probability \(\:P({H}_{j}\mid\:{D}_{t})\)therefore reflects the updated confidence that the bit is currently drilling within formation \(\:{H}_{j}\). This adaptive updating mechanism enhances the reliability of real-time stratigraphic tracking under uncertainty.
To quantify the uncertainty in the posterior estimates, the correlation coefficient of probability evolution is expressed as:
where \(\:\text{Var}\left({\delta\:}_{t}\right)\) denotes the variance of the residual between predicted and observed log values, and \(\:{\sigma\:}_{t}\)is the measurement standard deviation.
When \(\:{C}_{\text{ray}}\) decreases below a threshold, the model automatically identifies a potential formation transition or instability zone, prompting trajectory adjustment or drilling-parameter tuning.
The instantaneous risk coefficient \(\:R(x,t)\)is finally defined as:
A larger \(\:R(x,t)\)indicates higher geological or mechanical uncertainty, while lower values correspond to stable drilling intervals. Through this probabilistic framework, the system enables dynamic identification of formation changes and real-time correction of the wellbore path, ensuring both geological accuracy and mechanical safety during drilling.
Integrated expression of formation constraints
The design of a wellbore trajectory requires the joint contribution of multi-source geological models and real-time logging data to ensure both structural feasibility and mechanical stability under complex stratigraphic conditions4.
Based on the previous establishment of formation interface identification and probabilistic constraint models, this section develops an integrated spatial constraint formulation, which unifies formation geometry and logging-derived probability into a computable constraint coefficient, thereby achieving the fusion of static structural data and dynamic wellbore measurements for adaptive trajectory determination.
The spatial boundaries of the formation are defined by the top and bottom surfaces of the target reservoir and by fault-related exclusion zones, forming the geological feasibility domain:
where \(\:{H}_{t}\:\)and \(\:{H}_{b}\:\)represent the top and bottom boundary functions of the target reservoir (in meters), \(\:(x,y,z)\)denotes the spatial coordinate, and \(\:{{\Omega\:}}_{\text{fault}}\:\)defines the fault-excluded region. This expression specifies the spatial region of the formation that a trajectory can safely traverse within three-dimensional space.
The feasibility of trajectory propagation is further constrained by real-time logging data and formation-matching probability. If the measured log responses along the trajectory are consistent with the characteristic interval of the target formation, the trajectory segment is considered to be located within the reservoir domain:
where \(\:GR\left(z,t\right)\:\)and \(\:RT\left(z,t\right)\:\)denote the measured gamma-ray (API) and resistivity values at depth \(\:z\:\)and time \(\:t\); \(\:G{R}_{\text{m}\text{i}\text{n}}\:\)and \(\:G{R}_{\text{m}\text{a}\text{x}}\:\)are the corresponding lower and upper thresholds of the target formation; \(\:R{T}_{\text{crit}}\:\)is the resistivity cutoff for reservoir identification; and \(\:{P}_{\text{thr}}\:\)is the probabilistic recognition threshold.
These conditions jointly define a dual criterion of physical response and probability matching, providing real-time judgment of whether the trajectory remains within the desired reservoir interval.
To unify the static geological geometry and dynamic logging probability into a single representation, a composite constraint indicator \(\:{I}_{z}\left(t\right)\)is defined as:
where \(\:{I}_{\text{geo}},{I}_{\text{log}},{I}_{\text{prob}}\in\:\left\{\text{0,1}\right\}\:\)are the logical indicator functions for geometric, logging, and probabilistic conformity, respectively.When \(\:{I}_{z}=1\), the wellbore segment simultaneously satisfies both structural and logging consistency conditions, ensuring multi-source constraint integrity.
This unified constraint formulation provides a quantitative criterion for wellbore–formation spatial consistency, overcoming the limitations of single-parameter thresholding. It allows trajectory planning and correction to be dynamically adjusted based on multi-source data assimilation, enhancing the adaptability and geological fidelity of trajectory optimization in heterogeneous formations.
Drill string static modeling
The static mechanical response of the drill string constitutes a central link between the geological environment and the downhole mechanical behavior governing trajectory feasibility40. A trajectory that is geometrically smooth may still be mechanically inadmissible if drill string deformation, bending stresses, or pressure–stress interactions exceed allowable limits. Therefore, a feasible design must simultaneously satisfy geometric continuity, directional feasibility, and the static equilibrium conditions of the drill string under complex downhole loading.
If trajectory planning relies solely on geometric constraints while omitting the static response of the drill string–wellbore system, localized stress concentrations, excessive curvature, and instability-prone intervals may arise41. These failures occur because curvature, contact forces, and annular pressure all interact with formation heterogeneity in ways that geometric criteria alone cannot capture. Establishing a static mechanics model of the drill string–wellbore system is thus essential for quantifying these interactions. Such a model reveals the relationships among drill string deformation, curvature evolution, and stability margin, providing the theoretical foundation required for an integrated and mechanically informed trajectory optimization framework.
Force-equilibrium equation of the drill string
Assuming the drill string behaves as a continuous, slender, linearly elastic beam, its static equilibrium under an axial compressive load \(\:P\)can be expressed as:
where \(\:E\) is the elastic modulus, \(\:I\)is the moment of inertia of the drill string cross-section, \(\:s\)is the arc length along the wellbore, and \(\:y\left(s\right)\:\)denotes the lateral displacement. Equation (16) characterizes the bending equilibrium of the drill string subjected to axial compression and lateral deflection, serving as the mechanical basis for analyzing wellbore stability.
The spatial curvature of the wellbore trajectory is defined as:
where \(\:\theta\:\) and \(\:\phi\:\) are the inclination and azimuth of the trajectory, respectively. Curvature \(\:\kappa\:\left(s\right)\) reflects the local bending intensity of the trajectory and represents a key geometric descriptor linking wellbore shape to mechanical stress variation. Equations (16) and (17) jointly describe the geometric–mechanical coupling relationship between drill string deformation and wellbore curvature.
As illustrated in Fig. 4, when the drill string is subjected to axial compression \(\:P\)and bending moment \(\:M\), the curvature and wellbore inclination angle jointly determine the bending radius and bending strain distribution. With increasing inclination or curvature, the local bending moment and shear force also increase, resulting in contact or friction between the drill string and the wellbore wall. This contact reaction constitutes a key physical mechanism for maintaining static equilibrium and preventing buckling or instability under downhole load.

Schematic illustration of drill string loading and curvature coupling relationship.
The pressure difference between the annular pressure and formation pore pressure along the wellbore can be expressed as:
To ensure wellbore stability, this differential pressure must satisfy:
where \(\:{\Delta\:}{P}_{\text{m}\text{i}\text{n}}\) and \(\:{\Delta\:}{P}_{\text{m}\text{a}\text{x}}\) denote the lower and upper bounds of the stability pressure window, corresponding to collapse and fracture limits, respectively. This condition defines the mechanical safety envelope within which the wellbore can remain stable.
Combining curvature control with pressure balance yields the coupled mechanical constraint:
where \(\:{\kappa\:}_{\text{crit}}\) represents the maximum allowable curvature. Equations (2–16) describes static mechanical equilibrium, while Eqs. (17) defines curvature geometry. Equations (18) to (20) together establish a coupled geometric–mechanical equilibrium model, serving as the analytical foundation for evaluating drill string stability and trajectory feasibility.
Curvature and dog-leg severity
In engineering practice, to enable quantitative evaluation and control of wellbore curvature, the Dog-Leg Severity (DLS) index is introduced. DLS characterizes the rate of directional change per unit length of the wellbore, reflecting the average curvature intensity of a trajectory segment42. It is defined as:
where \(\:{\Delta\:}\alpha\:\)denotes the angle difference between two adjacent wellbore segments (°), and \(\:{\Delta\:}s\)represents the corresponding measured depth interval (m).A larger DLS indicates sharper curvature of the trajectory, leading to greater drill string bending, torque–drag, and increased wellbore instability risks.

Schematic illustration of curvature and dogleg severity (DLS).
As shown in Fig. 5, the geometric relationship among curvature radius \(\:R\), angular deviation \(\:{\Delta\:}\alpha\:\), and DLS is defined by Eq. (21). The grey cylinder represents the drill string, the black solid line depicts the wellbore trajectory, and the blue arc indicates the local curvature radius. The red arc angle \(\:\alpha\:\)corresponds to the orientation change between adjacent trajectory segments. The curvature defined in Eqs. (17) and the DLS defined in Eqs. (21) are mathematically interchangeable, allowing curvature characterization to be translated into engineering-practical DLS measurements.
During trajectory design, both curvature \(\:\kappa\:\left(s\right)\)and DLS must remain within the allowable limits to ensure drilling stability:
where \(\:{\kappa\:}_{\text{crit}}\)and \(\:DL{S}_{\text{crit}}\)represent the maximum allowable curvature and dogleg severity, respectively. These limits are determined by the mechanical properties of the drill string and wellbore stability conditions. Empirical studies indicate that when \(\:DLS>{3}^{\circ\:}/30\text{\hspace{0.17em}}m\), torque and friction rise significantly; when \(\:DLS>{5}^{\circ\:}/30\text{\hspace{0.17em}}m\), wellbore stability declines sharply due to stress concentration and potential wall failure.
Wellbore–formation pressure constraints
The mechanical feasibility of a wellbore trajectory largely depends on maintaining a stable pressure equilibrium between the wellbore and the surrounding formation. If the pressure control is inadequate, even a geometrically feasible trajectory may lead to wellbore collapse, fracture, or lost circulation under static or quasi-static loading conditions43,44. Therefore, an accurate wellbore–formation pressure coupling model must be established to ensure that the wellbore remains within a safe pressure window throughout the trajectory.
The annular pressure \(\:{P}_{ann}(z,t)\)can be expressed as:
where \(\:{P}_{surf}\) is the surface pressure, \(\:{\rho\:}_{m}\) is the mud density, \(\:g\)is the gravitational acceleration, and \(\:{\Delta\:}{P}_{ECD}\) represents the pressure loss induced by equivalent circulating density (ECD) during mud flow. his equation describes the effective hydrostatic and dynamic pressure exerted by the drilling fluid column along the wellbore.
The formation pore pressure \(\:{P}_{pore}\left(z\right)\)can be written as:
where \(\:{P}_{grad}\) is the hydrostatic gradient of formation fluids, and \(\:{\Delta\:}{P}_{abn}\) represents the abnormal pressure correction caused by formation compaction or fluid migration.This formulation accounts for both normal hydrostatic and abnormal pressure effects within the formation.
The differential pressure is defined as:
To ensure wellbore stability, this pressure differential must remain within the safe operating window:
where \(\:{\Delta\:}{P}_{\text{m}\text{i}\text{n}}\) denotes the collapse pressure limit (lower bound) to prevent wellbore caving, and \(\:{\Delta\:}{P}_{\text{m}\text{a}\text{x}}\) represents the fracture pressure limit (upper bound) to avoid tensile cracking and loss circulation.When \(\:{\Delta\:}P\)falls outside this range, the trajectory becomes mechanically infeasible, regardless of its geometric configuration.

Illustration of the pressure window and formation pressure gradient.
As shown in Fig. 6, the annular pressure \(\:P\), the minimum allowable pressure difference \(\:{\Delta\:}{P}_{\text{m}\text{i}\text{n}}\), and the formation pressure gradient. The background shading indicates layered formations. The difference \(\:{\Delta\:}P\)defines the mechanically admissible pressure range, while the red arrow marks the local pressure gradient at the casing shoe (CD). This figure provides the basis for defining the geomechanical constraint domain used in subsequent trajectory optimization.
Integrated geomechanical–drill string modeling
The design of a wellbore trajectory must simultaneously account for formation heterogeneity, pore-pressure variations, and the mechanical response of the drill string, as these factors jointly determine the geometric feasibility and stability of the wellpath. Relying on geometric criteria alone is insufficient in structurally complex or mechanically sensitive formations, where curvature evolution, stress redistribution, and pressure-window compliance interact in non-linear ways.
To address these challenges, this study develops an integrated geological–geomechanical optimization framework in which structural, pressure-related, and mechanical constraints are parameterized into a unified set of solvable variables23. This formulation enables coordinated evaluation of geometric admissibility and mechanical stability at each iteration of the optimization process. By embedding these constraints into a consistent mathematical structure, the framework enhances the adaptability and computational tractability of trajectory planning in heterogeneous formations, while providing a rigorous theoretical foundation for multi-objective intelligent optimization.
Construction of the trajectory design objective function
The essence of wellbore trajectory optimization lies in converting geometric requirements and engineering feasibility into a computable objective function45. Under complex geological and geomechanical conditions, trajectory design must reconcile multiple competing constraints to ensure that:
-
(1)
Curvature variation is minimized, thereby reducing drill string bending stress and mitigating mechanical fatigue risk;
-
(2)
Mechanical feasibility and operational safety are maintained, with the trajectory remaining within geomechanical and pressure-window limits;
-
(3)
Reservoir exposure is maximized, promoting improved production efficiency.
Based on these considerations, the trajectory design problem is expressed through a multi-objective optimization formulation, which integrates geometric smoothness, mechanical stability margins, and reservoir-contact objectives into a unified decision structure:
where \(\:J\) is the composite objective function, \(\:L\)denotes the wellbore length, \(\:\kappa\:\left(s\right)\) represents the curvature along the trajectory, and \(\:TFI\)(Trajectory Feasibility Index) quantifies the trajectory’s smoothness and mechanical feasibility. The weighting coefficients \(\:{\lambda\:}_{1},{\lambda\:}_{2},{\lambda\:}_{3}\) adjust the contribution of each term. Equations (27) ensures global smoothness and stability of the trajectory but does not penalize local curvature anomalies that may cause excessive stress or instability.
To address this, a penalty term based on Dog-Leg Severity (DLS) is introduced to automatically suppress excessive local curvature:
where \(\:{P}_{DLS}\) is the curvature penalty term, \(\:DLS\left(s\right)\) is the dog-leg severity at position \(\:s\), and \(\:DL{S}_{crit}\) is the maximum allowable DLS threshold. When \(\:DLS\left(s\right)\)exceeds \(\:DL{S}_{crit}\), the quadratic penalty increases rapidly, effectively constraining curvature peaks during the optimization process.
The final unified objective function thus becomes:
where \(\:{\lambda\:}_{4}\) denotes the penalty weighting coefficient. This formulation combines global smoothness objectives with localized mechanical-safety constraints, allowing the trajectory design problem to be expressed as a tractable mathematical optimization model. When embedded within intelligent global–local optimization algorithms, the framework supports adaptive, uncertainty-aware trajectory planning under complex geological and geomechanical conditions, and establishes a robust foundation for multi-objective intelligent optimization.
Unified constraints and optimization model
Trajectory optimization must satisfy a set of integrated geometric, probabilistic, and geomechanical constraints, ensuring both continuous path placement within reservoir boundaries and mechanical stability under the prevailing stress–pressure conditions46. In this study, these constraints are unified into a composite feasible domain \(\:{\Omega\:}\), defined as
.
where \(\:{{\Omega\:}}_{\text{geo}}\)specifies the geometric admissible region governed by reservoir top–bottom boundaries and fault-avoidance requirements; \(\:{{\Omega\:}}_{\text{prob}}\)denotes the probabilistic constraint domain, dynamically updated using real-time logging information and boundary-uncertainty corrections; and \(\:{{\Omega\:}}_{\text{mech}}\)represents the mechanical constraint domain, ensuring that the trajectory remains within the safe pressure–stress operating window.
A trajectory \(\:(x,y,z)\)is considered feasible only when it simultaneously satisfies the geometric, probabilistic, and geomechanical constraints defined above, as illustrated in Fig. 7.

Schematic of multi-source constraint coupling and integrated feasible domain Ω.
Within this unified framework, trajectory planning can be formulated as a constrained minimization problem. Using the total objective function \(\:{J}_{\text{tot}}\) defined in Eqs. (29) as the optimization target, the model becomes
.
When the feasible domain \(\:{\Omega\:}\)is smooth and continuous, deterministic optimization methods—such as nonlinear programming or sequential quadratic programming (SQP)—can achieve rapid convergence. In contrast, highly heterogeneous or structurally discontinuous formations often produce non-convex or non-smooth feasible regions, where intelligent global-search algorithms (e.g., genetic algorithms, particle swarm optimization, or surrogate-assisted strategies) are more effective. Adopting a hybrid scheme allows efficient exploration of the design space while ensuring robust convergence, thereby guaranteeing that the optimized trajectory remains both geometrically adaptable and mechanically feasible under complex geological conditions.
Numerical implementation and algorithmic workflow
To implement the proposed trajectory optimization framework in engineering practice, the theoretical formulation must be cast into a computable numerical model. The trajectory is parameterized to maintain spatial continuity, while the optimization procedure seeks to minimize the objective function subject to integrated geological and geomechanical constraints47.
In this study, a three-stage algorithmic workflow—consisting of trajectory parameterization, spatial discretization, and numerical evaluation—is developed to ensure computational efficiency and stability when dealing with heterogeneous and structurally complex formations.
Trajectory parameterization method
To express the trajectory optimization problem in a computable numerical form, the wellbore path must first be parameterized48. The chosen parameterization governs spatial continuity, curvature smoothness, and the convergence behavior of the optimization algorithm, thereby forming the basis for numerical implementation. Common representations include piecewise linear interpolation, polynomial fitting, and Bézier or B-spline curves, among which B-splines are preferred due to their superior smoothness and local controllability.
In this study, the trajectory \(\:\mathbf{r}\left(s\right)\)is represented as a three-dimensional parametric curve:
where \(\:s\) denotes the measured depth along the trajectory and \(\:L\)is the total well length.
To ensure curvature continuity, both inclination \(\:\theta\:\left(s\right)\) and azimuth \(\:\phi\:\left(s\right)\) are formulated using cubic B-spline interpolation:
where \(\:{\theta\:}_{i}\)and \(\:{\phi\:}_{i}\)are the control-point parameters, and \(\:{B}_{i}^{3}\left(s\right)\)denotes the cubic B-spline basis function.This representation guarantees continuous differentiability of the trajectory and provides local adaptability through the adjustment of control points, enabling both geometric smoothness and efficient numerical optimization.

B-spline-based trajectory parameterization in 3D coordinate space.
As shown in Fig. 8, The use of B-spline parameterization converts the trajectory design problem from an infinite-dimensional functional optimization into a finite-dimensional parametric optimization problem, thereby substantially improving computational tractability. In addition, the control points possess clear physical interpretation, representing the inclination and azimuth at discrete measured-depth intervals. This establishes a direct correspondence between the optimized parameters and field-operational settings, ensuring transparent adjustability during drilling execution. The parameterized formulation also provides a stable numerical foundation for subsequent constraint evaluation and objective-function minimization under heterogeneous and structurally complex geological conditions.
Optimization strategy
After parameterization, the trajectory design problem becomes a finite-dimensional nonlinear constrained optimization problem49. The objective is to minimize the integrated cost function subject to the combined geometric, probabilistic, and geomechanical constraints:
where \(\:\mathbf{p}\)denotes the trajectory parameter vector (e.g., B-spline control points \(\:{\theta\:}_{i},{\phi\:}_{i}\)); \(\:{J}_{\text{tot}}\)is the composite objective function defined in Eq. (29); and \(\:{\Omega\:}\)is the unified feasible domain described in Eq. (30).

Optimization workflow integrating parameterization, constraints, and algorithmic solution.
As shown in Fig. 9 ,This optimization problem involves nonlinear objectives (such as curvature and DLS) and integrated geometric, probabilistic, and geomechanical constraints, many of which are non-analytic and therefore require numerical evaluation. To enable computation, the continuous trajectory is discretized into a set of finite nodes, where the objective function and constraint terms are evaluated and accumulated, yielding a tractable discrete optimization model.
Two categories of algorithms are employed depending on the smoothness of the feasible domain and the complexity of the constraint landscape:
-
(1)
Gradient-based algorithms (e.g., Sequential Quadratic Programming, nonlinear programming): Suitable for smooth or near-convex feasible regions, these methods provide rapid local convergence and high numerical accuracy.
-
(2)
Intelligent metaheuristic algorithms (e.g., genetic algorithms, particle swarm optimization, hybrid hierarchical search): These are preferred for non-smooth, heterogeneous, or strongly non-convex settings, where geological uncertainty or structural discontinuities create irregular search landscapes. They offer enhanced global exploration capability and robustness against noisy or uncertain data.
The hybrid strategy—using metaheuristic algorithms for global exploration followed by gradient-based refinement—balances solution accuracy with computational efficiency. This ensures that the optimized trajectory remains adaptable and stable under heterogeneous and structurally complex formation conditions.
Algorithmic workflow
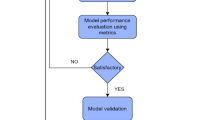
The numerical implementation of trajectory optimization follows an iterative workflow consisting of discretization, objective evaluation, constraint checking, parameter updating, and convergence assessment. A key requirement of the framework is that the trajectory must remain within the unified feasible domain throughout each iteration. Accordingly, the optimization problem is formulated as:
where \(\:p\) denotes the trajectory parameter vector and \(\:{J}_{\text{tot}}\) is the integrated objective function defined in Eqs. (2–29). The unified feasible domain \(\:{\Omega\:}\) is specified in Eq. (30).
Figure 10 summarizes the complete algorithmic workflow. The process begins with input preparation—wellhead/target definitions and offset-well data—followed by initialization of the trajectory parameters. The continuous trajectory is then discretized, and the corresponding geometric, probabilistic, and geomechanical constraints \(\:({{\Omega\:}}_{\text{geo}},{{\Omega\:}}_{\text{prob}},{{\Omega\:}}_{\text{mech}})\) are constructed to define the admissible solution space.

Flowchart of the trajectory optimization process.
Each iteration includes four major stages:
-
(1)
Constraint checking:
At each discretized node, the model evaluates whether the candidate trajectory satisfies all constraint sets:
Geometric constraints
Reservoir boundaries, faults, and structural discontinuities:
Mechanical constraints
Curvature and dogleg severity limits, safe pressure window:
Probabilistic constraints
Membership within the probability corridor:
If any constraint is violated, the trajectory segment is corrected or re-initialized to remain within the unified feasible domain \(\:{\Omega\:}\).
-
(2)
Objective evaluation:
For a trajectory that satisfies all constraints, the corresponding integrated objective function is evaluated:
where the solved components include:
Trajectory geometry from B-spline parameterization:
Spatial path reconstruction:
Curvature and DLS computation
governed by Eq. (37).
These equations are solved to compute the objective function at each iteration.
-
(3)
Parameter updating:
The trajectory parameters (p) are updated using a hybrid strategy:
Global search: GA, PSO, or surrogate-assisted methods.
Local refinement: gradient-based SQP or nonlinear programming.
This enables robust convergence in both smooth and discontinuous search spaces, ensuring the trajectory remains within \(\:{\Omega\:}\).
-
(4)
Convergence and feasibility assessment.
The algorithm terminates when both conditions are satisfied:
Objective convergence:\(\:[{\Delta\:}{J}_{\text{tot}}<\epsilon\:]\)
Feasibility retention: all constraints satisfied over the entire trajectory.
If either condition fails, the next iteration is executed with updated parameters.
To ensure computational efficiency while preserving global search capability, the optimization problem is solved using a hybrid global–local strategy. A metaheuristic algorithm (e.g., GA/PSO) is employed to explore the non-convex search space, and a gradient-based refinement (SQP/MLP) is applied for local convergence once a promising region is identified. This structure follows the general hybrid optimization paradigm introduced in ref50,51, which has been widely used for nonlinear constrained engineering problems.
Uncertainty and multiple-solution characteristics of the optimization framework
Although the trajectory optimization problem is mathematically expressed as a deterministic minimization of the integrated objective function, the search landscape formed by geological, geomechanical, and probabilistic constraints is inherently non-convex. As a result, the numerical procedure typically yields not a single unique trajectory but a set of admissible solutions that satisfy the unified feasible domain \(\:{\Omega\:}\). These solutions may exhibit similar objective-function values while presenting different geometric configurations or safety margins, reflecting the multi-solution nature of the design space.
To explicitly characterize this uncertainty, the framework evaluates all near-optimal trajectories within a tolerance band around the minimum objective value. For each candidate trajectory, curvature statistics, pressure-window compliance, high-risk penetration length, and anti-collision distance are computed. This allows the identification of trajectories that remain stable under small perturbations of weighting coefficients, input parameters, or geological interpretations. Furthermore, the probabilistic corridor provides an additional uncertainty-aware measure by quantifying the likelihood that a trajectory remains within structurally reliable zones throughout its course.
These analyses indicate that optimal solutions form a robust solution ensemble rather than a single deterministic path. Engineering judgment therefore plays a critical role in selecting the final design, balancing operational preferences (e.g., tortuosity constraints, drilling-system limitations) with robustness criteria. In this way, the proposed framework ensures that the final selected trajectory is not only optimal in a mathematical sense but also resilient to uncertainties in formation properties and modeling assumptions.
Conceptual definitions: probability corridor and risk mask
To enhance conceptual clarity and ensure consistent terminology throughout the manuscript, two key concepts—probability corridor and risk mask—are explicitly defined as follows.
Probability corridor
The probability corridor represents the three-dimensional region in which the formation boundaries, geological interfaces, or target intervals are predicted to occur with high confidence. It is constructed from multi-well logging interpretation, structural modeling, and probabilistic boundary updating. Formally, the corridor corresponds to the spatial domain where the formation-membership probability satisfies:
with \(\:{P}_{\text{thr}}\) typically set to 0.4–0.6 depending on formation uncertainty.
The corridor provides a soft geological constraint, guiding the trajectory to remain within highly reliable structural regions while still allowing flexibility where uncertainty is high.
Risk mask
The risk mask is a binary or thresholded indicator that highlights zones prone to mechanical instability, such as low-strength shale, high-stress contrast regions, or intervals with known collapse or enlargement events. It is derived from logging indicators (e.g., GR, AC, caliper), mechanical indices (e.g., curvature-sensitive stress metrics), and pressure-window evaluation.
The risk mask acts as a hard mechanical constraint, preventing the trajectory from entering instability-prone regions and penalizing designs with excessive curvature or pressure-window violations.
Distinctions and complementary roles
Although both concepts relate to spatial constraint characterization, they play distinct and complementary roles in the optimization framework:
-
The probability corridor captures geological uncertainty and describes where the formation is most likely to occur.
-
The risk mask captures mechanical vulnerability and identifies intervals where drilling is unsafe.
-
The corridor is probabilistic and continuous, whereas the mask is deterministic or threshold-based.
-
The corridor encourages the trajectory to remain within structurally reliable regions, while the mask prevents penetration into geomechanically unstable zones.
Integration into trajectory optimization
During trajectory optimization, both constraints are evaluated at each discretized node:
-
The corridor defines the probabilistic constraint domain \(\:{{\Omega\:}}_{\text{prob}}\).
-
The risk mask contributes to the mechanical feasibility domain \(\:{{\Omega\:}}_{\text{mech}}\).
Together, they ensure that the trajectory balances geological reliability, mechanical safety, and uncertainty resilience.
Case study and discussion
The previous sections have systematically established the theoretical framework for wellbore trajectory initialization, including stratigraphic constraints, drill string static mechanics, and the integrated optimization model. To verify the applicability and effectiveness of these methods under field conditions, this chapter selects a representative case from a typical well block. Using logging and structural information from offset wells, combined with the mathematical models and optimization workflow developed in Chap. 2, trajectory feasibility is modeled and solved. The analysis emphasizes graphical results, including visualization of stratigraphic constraints, curvature and dogleg severity distributions, wellbore–formation pressure windows, trajectory optimization convergence, and comparative design schemes. Sensitivity analyses and detailed discussions are also conducted to assess the model’s response to variations in key parameters, thereby providing insights for practical application.
Engineering background and data preparation
A representative complex well cluster in the Sichuan Basin was selected to validate the proposed methodology. The study area exhibits pronounced structural deformation and strong lithological heterogeneity, with substantial variations in reservoir top and bottom boundaries. These geological features place stringent demands on trajectory optimization, particularly with respect to path adaptability and geomechanical feasibility.
As shown in Fig. 11, a three-dimensional geological model of the study area was constructed, capturing the spatial geometry of the reservoir interfaces and associated structural characteristics. This model provides the foundational geological framework for trajectory design, serving as the basis for subsequent optimization, geomechanical analysis, and feasibility evaluation under realistic field conditions.

Geological cross-section of the study block.
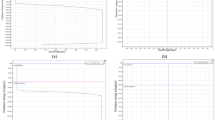
Five adjacent wells were selected, and standardized GR, AC, and RT logs were acquired. Following normalization and noise filtering, the logs exhibit consistent stratigraphic patterns and clearly aligned key interfaces across the wells, providing a reliable foundation for inter-well correlation and subsequent geological modeling (Fig. 12).

Comparison of logging curves from adjacent wells.
As shown in Fig. 12, the GR, AC, and RT logs from the five neighboring wells exhibit consistent stratigraphic responses, with the reservoir top and bottom boundaries and borehole anomaly zones clearly identified. Prominent GR elevations and borehole enlargements correspond closely with documented collapse events, providing a reliable basis for delineating target intervals and constructing probabilistic and geomechanical constraints.
To ensure data consistency and analytical reliability, a comprehensive data-governance and preprocessing workflow was implemented (Fig. 13), consisting of:
-
(1)
Data cleaning and quality control;
-
(2)
Depth standardization and inter-well alignment;
-
(3)
Feature extraction and normalization into a unified attribute domain.

Workflow of data processing and modeling.
As shown in Fig. 13, the data-processing and modeling workflow comprises raw data acquisition, quality control, normalization, missing-value interpolation, outlier removal, inter-well alignment, 3-D geological modeling, and probabilistic constraint generation. Through this sequence, scattered single-well logs are transformed into an integrated multi-well dataset and a coherent three-dimensional geological model, supplying complete and reliable inputs for subsequent geomechanical analysis and trajectory optimization.
As illustrated in Fig. 14, the processed data and constructed geological model provide a robust foundation for trajectory design and optimization under realistic subsurface conditions.

Comparison of adjacent-well logging curves (after data preprocessing).
Results of stratigraphic and static constraints
Building upon the defined formation constraints and the established drill string static mechanics model, this section applies the integrated geological–geomechanical framework developed in Chap. 2 to the initial trajectory design of representative wells in the study area. By combining neighbor-well logging constraints, structural interface recognition, and drill string stress simulations, the spatial configuration and mechanical behavior of the trajectory are jointly optimized, enabling coordinated control of both geological adaptability and mechanical stability, as illustrated in Fig. 15.

Three-dimensional schematic of wellbore trajectory.
Stratigraphic probability constraints and High-Risk interval identification
Based on the integrated multi-log dataset from five wells (GR, RT, RXO, AC, CNL, DEN, PE, SP), a probabilistic model of formation occurrence was constructed to identify high-risk intervals associated with lithologic transitions and wellbore instability. Table 1 summarizes the statistical results of formation probability and risk indicators.
The results reveal distinct differences in average probability (µ-P) and risk (µ-Risk) among wells. Combining the CAL expansion logs further exposes that several intervals with low probability correspond to high-risk zones, implying potential instability and partial collapse that require careful trajectory control and adjustment during drilling.
To quantify this relationship, a probability-risk correlation coefficient ρ-prob was introduced. For the five wells studied, ρ-prob values range from 0.15 to 0.30, indicating a moderate negative correlation between formation probability and collapse risk, consistent with field observations.

Depth distribution of reservoir probability and wellbore-instability risk.
As shown in Fig. 16, The blue curve shows the formation probability derived from multi-log fusion, whereas the red markers represent instability indicators extracted from caliper enlargement and abnormal log responses. The gray-shaded zones denote low-probability (< 0.4) intervals corresponding to mechanically weak or unstable formations. The spatial correspondence between probability minima and instability markers highlights the geological basis for defining probabilistic constraints in trajectory design.
Overall, the coupling pattern between probability and risk validates the physical interpretability and rationality of the proposed probabilistic-mechanical model, which effectively captures both lithologic heterogeneity and stability variations across depth.
Curvature and dog-leg severity distribution
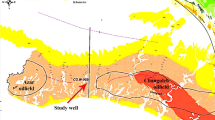
To evaluate the geometric feasibility and mechanical stability of candidate wellbore trajectories, the spatial relationships among curvature (κ), dogleg severity (DLS), and formation uncertainty were examined.

Probability corridor and high-risk mask with candidate trajectories.
As shown in Fig. 17, The color map represents the 3D formation-probability corridor, where warmer colors denote higher structural confidence. Gray-shaded regions correspond to low-probability (< 0.4) and mechanically weak intervals that should be avoided. Black curves represent candidate trajectories sampled during the global search process. The figure illustrates how geological uncertainty and mechanically unfavorable regions jointly constrain the feasible trajectory space.
Building upon this, Fig. 18 quantifies the relationship between the composite cost function \(\:J\)and the maximum dogleg severity (Max-DLS) for all sampled candidate trajectories. As Max-DLS exceeds approximately 3°/30 m, the cost rises sharply, indicating the onset of excessive bending stress, higher torque requirements, and reduced mechanical feasibility. In contrast, trajectories with moderate Max-DLS (< 2.5°/30 m) cluster in the low-cost region, reflecting both reduced mechanical loading and better alignment with the high-probability structural corridor identified earlier. This distribution reveals a clear trade-off between geometric curvature and overall trajectory feasibility.

Candidate trajectories: cost vs. maximum DLS.
Each point represents a sampled trajectory evaluated under the integrated optimization framework. A sharp rise in cost occurs when Max-DLS exceeds approximately 3°/30 m, indicating excessive bending stress and reduced mechanical feasibility. Trajectories with lower Max-DLS cluster in the low-cost region, reflecting better alignment with the high-probability corridor and improved mechanical stability. The distribution reveals the inherent trade-off between curvature behavior and overall trajectory feasibility.
Optimization process and trajectory design results
Experimental setup and baselines
This section integrates the probabilistic and geomechanical constraints established earlier into a unified multi-objective optimization framework that links geometric feasibility with mechanical stability. The purpose of this framework is to evaluate how the proposed integrated geomechanical–drill-string methodology performs under realistic subsurface conditions and constraint interactions. As shown in Fig. 19, the optimization workflow is organized into four modules:
-
(1)
Data input, including geological models, multi-well logs, and engineering parameters;
-
(2)
Preprocessing and initialization, where structural surfaces are smoothed and a minimum-curvature initial path is constructed;
-
(3)
Optimization execution, which iteratively evaluates constraint compliance and updates trajectory parameters; and.
-
(4)
Result output and performance assessment, including geometric, geomechanical, and probabilistic metrics.

Optimization setup and baseline workflow.
Rectangular blocks denote computational modules, while rounded blocks represent decision or convergence steps. Solid arrows indicate data flow between modules (e.g., logs → preprocessing → optimization), whereas dashed arrows indicate logical control, such as feasibility checks triggering re-initialization or iteration updates. The workflow proceeds from geological-surface smoothing and minimum-curvature initialization (Geo-only), through geomechanical constraint enforcement (Geo + Mech), and finally to probabilistic refinement (Geo + Mech + Prob). This layered sequence integrates structural, mechanical, and uncertainty-aware constraints into the trajectory optimization process.

Distribution of dogleg severity (DLS) and curvature (κ) with depth.
Figure 20 presents the depth-dependent curvature \(\:\kappa\:\)and dogleg severity (DLS) profiles along the representative wells. Most intervals fall within \(\:\kappa\:<1\text{}{m}^{-1}\)and DLS < 3°/30 m, indicating good geometric smoothness and mechanical feasibility. Local curvature spikes align with geologically unstable zones, where pressure imbalance and elevated bending moments are more likely to develop.
Statistical analysis shows that high-DLS intervals constitute only 6.2% of the total measured depth and predominantly occur within weak shale or interbedded mudstone formations. In contrast, mechanically stable segments (Geo + Mech) account for nearly 73% of the well length, demonstrating a substantial improvement in structural integrity. These results indicate that combining curvature control with probabilistic constraint filtering effectively suppresses localized geometric irregularities and enhances overall wellbore stability in heterogeneous and structurally complex formations.
Optimization results and comparative analysis
Under the unified evaluation framework, three optimization schemes were assessed: A (Geo-only), B (Geo + Mech), and C (Geo + Mech + Prob). Each scheme was evaluated for its ability to reach a stable solution within a finite number of iterations under multi-objective constraints. Although all three schemes achieved convergence, clear differences emerged in convergence efficiency, solution distribution, and key stability metrics, highlighting the advantages of progressively incorporating geomechanical and probabilistic constraints.
Convergence performance comparison
The convergence analysis shows distinct behavioral differences among the three optimization schemes. Scheme A rapidly produces a smooth trajectory in the early iterations; however, without mechanical or probabilistic constraints, it exhibits strong dispersion and inconsistent convergence. Scheme B, which incorporates curvature, DLS, and pressure-window limits, significantly improves stability but converges more slowly due to the increased constraint complexity. Scheme C demonstrates the most stable and efficient performance: its descent profile is smoother, oscillation amplitude is substantially reduced, and its Pareto-front distribution is denser and more uniform. These characteristics highlight the advantages of jointly integrating geomechanical and probabilistic information, which suppresses unstable search behavior and guides the optimization toward more physically meaningful and geologically consistent solutions, as shown in Fig. 21.

Convergence curves of optimization under different schemes (A/B/C).
The curves show the evolution of the composite objective function during iterative optimization. Scheme A converges rapidly but exhibits irregular oscillation due to the absence of stability-oriented constraints. Scheme B achieves smoother descent by enforcing curvature and pressure-window limits, though mild fluctuations persist. Scheme C maintains the lowest objective-function values with minimal oscillation, demonstrating the stabilizing influence of probabilistic constraints and improved coordination among competing objectives.
Key metric comparisons
To quantitatively evaluate the performance of the three optimization schemes, a series of trajectory metrics were statistically analyzed, including total well length \(\:L\); average and maximum dogleg severity (Avg-/Max-DLS); curvature percentile (P95); effective corridor coverage rate (ER); high-risk interval length (\(\:{L}_{\text{risk}}\)); pressure-window violation rate; minimum anti-collision distance; and computational cost. A summary of these comparative results is provided in Table 2.
The results show that Scheme A effectively controls total well length but exhibits pronounced curvature and DLS outliers, resulting in extended high-risk penetration segments (\(\:{L}_{\text{risk}}=265\text{\hspace{0.17em}m}\)) and a higher pressure-window violation rate (2.3%). Scheme B, which incorporates mechanical constraints, substantially reduces curvature and DLS values and lowers the violation rate to 0.7%. However, due to the absence of probabilistic guidance, the drilling corridor is not fully captured, and localized intersections with instability zones still occur.
By contrast, the proposed Scheme C (Geo + Mech + Prob) delivers significant improvements without increasing well length or computational burden. Both Max-DLS and curvature P95 decrease by more than 30% relative to Scheme A, while corridor coverage (ER) increases by 13% points and \(\:{L}_{\text{risk}}\)is reduced by over 60%. Scheme C also eliminates pressure-window violations and maintains a safe anti-collision distance (> 25 m), demonstrating that the combined incorporation of geomechanical constraints and probabilistic information enhances both trajectory safety and geological adaptability. Overall, these results highlight the superiority of the proposed framework in achieving balanced optimization across geometric, geomechanical, and risk-based objectives.
Trajectory comparisons
To further assess the spatial behavior of the three optimization schemes, a representative well was selected for trajectory visualization and comparison. As shown in Fig. 22, Scheme A (Geo-only) exhibits noticeable curvature distortion in the mid-section, where the trajectory deviates toward low-probability regions and intersects several high-risk intervals. These deviations are accompanied by pronounced DLS anomalies, indicating insufficient mechanical and uncertainty-aware guidance.
Scheme B (Geo + Mech) enhances geometric smoothness and avoids part of the unstable region; however, the trajectory still drifts toward the formation boundary in structurally complex zones. This behavior reflects the limitations of relying solely on geometric and geomechanical constraints when uncertainty is significant.
In contrast, Scheme C (Geo + Mech + Prob) yields a trajectory that remains well centered within the high-probability corridor. Curvature is more uniformly distributed, DLS fluctuations are markedly reduced, and unstable intervals are effectively bypassed. These improvements demonstrate that jointly enforcing geomechanical constraints and probabilistic guidance produces a trajectory that is better adapted to heterogeneous subsurface conditions and more robust against both structural variability and mechanical risk.

Optimized trajectories under schemes A/B/C with probability corridor overlay.
Colored curves represent optimized trajectories for Schemes A (red), B (blue), and C (green). The background color map denotes the formation probability corridor, where warmer colors indicate higher structural confidence; gray regions mark high-risk intervals. Scheme A deviates into low-probability zones, while Scheme B improves smoothness but remains biased toward boundary regions. Scheme C remains centered within the high-probability corridor and avoids unstable intervals, demonstrating improved adaptability to heterogeneous subsurface conditions.
The radar chart in Fig. 23 offers a multidimensional comparison of the key performance indicators across the three optimization schemes. Scheme A demonstrates limited control over curvature and risk exposure, while Scheme B improves geometric smoothness but still fails to fully avoid high-risk intervals. Scheme C achieves the most balanced and comprehensive improvement: it attains higher corridor coverage (ER), significantly reduces the length of high-risk penetration (\(\:{L}_{\text{risk}}\)), and maintains a superior level of geometric smoothness as evidenced by lower Avg-/Max-DLS and curvature P95. These results confirm that probabilistic guidance enhances the algorithm’s ability to make adaptive trade-offs between geometric continuity and mechanical safety when operating in heterogeneous subsurface environments.

Radar chart of key performance metrics (schemes A/B/C).
The axes represent geometric indicators (Avg-/Max-DLS, curvature P95), geological adaptability (corridor coverage), and mechanical risk metrics (high-risk interval length). Larger polygon areas denote more favorable performance. Scheme A shows limited stability and poor risk avoidance; Scheme B enhances smoothness but lacks consistent corridor alignment. Scheme C achieves the most balanced improvement across all metrics, reflecting effective integration of geomechanical constraints and probabilistic guidance.
The comparative analysis confirms that integrating geometric, geomechanical, and probabilistic constraints significantly improves the feasibility and robustness of trajectory design. The probabilistic adjustment reduces dependence on deterministic structural surfaces, while the unified constraint system maintains a stable balance among curvature control, risk avoidance, and drilling-corridor utilization. Scheme C therefore provides the best compromise between smoothness, stability, and uncertainty resilience.
To assess robustness with respect to objective weighting, Table 3 summarizes a sensitivity analysis under three weighting configurations. The results show only modest variations in trajectory length, DLS metrics, and corridor coverage, indicating that the optimization framework remains stable and does not overreact to changes in priority settings.
Engineering applicability and discussion
The results in Sect. 3.3 confirm that the proposed framework achieves a balanced improvement in trajectory length, curvature, and risk control. This section further discusses its engineering applicability, comparative advantages, and potential limitations, aiming to connect experimental validation with practical deployment and to provide insights into robustness and scalability for real drilling operations.
Practical applicability in drilling operations
The proposed optimization framework demonstrates strong applicability within modern drilling workflows. Its computational efficiency is sufficient to support near real-time evaluations, making it well-suited for the edge–cloud collaborative architectures increasingly integrated into intelligent drilling systems. By achieving a balanced trade-off among well length, curvature, and probabilistic risk constraints, the method delivers direct engineering benefits, including reduced drilling costs, improved wellbore stability, and enhanced reservoir contact.
Furthermore, the robustness tests presented in Sect. 3.3.2 confirm that the framework maintains consistent performance under varying weight configurations and input uncertainties. This robustness is particularly critical in field environments characterized by geological heterogeneity and measurement noise, ensuring stability and adaptability of decision-making processes.

Engineering workflow of trajectory optimization framework in an edge–cloud collaborative drilling system.
To illustrate its engineering integration, a schematic workflow is presented in Fig. 24, demonstrating how the proposed optimization model can be embedded into an edge–cloud collaborative drilling system. In this framework, the rig site is responsible for real-time data acquisition, the edge node performs rapid preprocessing and preliminary evaluations, while the cloud platform executes advanced optimization and global trajectory control. This hierarchical architecture ensures low-latency responses at the wellsite while leveraging the computational power of the cloud for multi-objective optimization, thereby enabling seamless integration of trajectory design into intelligent drilling workflows.
Advantages over conventional approaches
Compared with conventional wellbore trajectory design methods, which typically rely on simplified geometric models or empirical rules, the proposed framework achieves a systematic integration of geological, mechanical, and probabilistic constraints. Traditional approaches generally focus on minimizing trajectory length or controlling curvature, but fail to simultaneously account for wellbore stability, anti-collision risks, and uncertainty quantification, thereby limiting their reliability in complex geological settings.
In contrast, the framework developed in this study incorporates stratigraphic constraints, drill string mechanics, and probabilistic corridors into a unified multi-objective optimization process, providing a more realistic representation of wellbore–formation interactions. The results demonstrate that optimized trajectories are not only shorter and smoother but also safer and more robust. Sensitivity analyses in Sect. 3.3.2 further confirm that the proposed method consistently outperforms baseline designs under varying weight configurations, highlighting its adaptability and engineering applicability.
Table 4 provides a quantitative comparison between conventional trajectory design methods and the proposed framework across multiple performance metrics. The results show that the proposed approach delivers significant improvements in both efficiency and reliability. The average trajectory length is reduced by 7.1%, and the maximum dogleg severity decreases by 35.4%, yielding smoother well profiles and lower mechanical loading on the drill string. In terms of safety performance, the risk violation rate is reduced by 63.9%, demonstrating the effectiveness of the probabilistic corridor in mitigating drilling hazards and avoiding instability-prone intervals. Reservoir exposure increases by 18.1%, improving contact with the productive formation, while the robustness score rises by 33.9%, confirming stable performance under varying weighting strategies and input uncertainties. Unlike conventional methods that are limited to offline geometric planning, the proposed framework supports real-time deployment within an edge–cloud collaborative environment, making it well suited for intelligent drilling operations and adaptive trajectory control in complex formations.
Conclusions
This study presents an integrated geomechanical–drill string trajectory optimization framework that incorporates stratigraphic constraints, drill string mechanical responses, and probabilistic risk corridors into a unified multi-objective design strategy. By jointly considering trajectory geometry, mechanical stability, and uncertainty-driven risk factors, the framework overcomes the limitations of conventional approaches that rely on simplified geometric assumptions or single-mechanism constraints. The integration of deterministic geomechanical indicators with probabilistic uncertainty characterization enables a more comprehensive and adaptive assessment of trajectory feasibility at the design stage.
Case study results demonstrate that the proposed method consistently outperforms traditional trajectory design practices. The optimized trajectories achieve a 7.1% reduction in well length, a 35.4% decrease in maximum dogleg severity, and a 63.9% reduction in high-risk interval penetration, while reservoir exposure increases by 18.1% and robustness indicators improve by 33.9%. These quantitative improvements highlight the effectiveness of combining geometric, geomechanical, and probabilistic constraints to achieve balanced optimization across competing design objectives.
Overall, the proposed framework offers a more rigorous, adaptive, and uncertainty-aware paradigm for wellbore trajectory design in structurally complex formations. Its strength lies in the coordinated use of geological modeling, mechanical analysis, and probabilistic risk evaluation, providing a reliable foundation for safe, efficient, and field-ready trajectory planning. The method not only addresses key limitations of existing approaches but also establishes a theoretical basis and practical guidance for future advancements in intelligent trajectory optimization.
Data availability
The datasets generated and/or analyzed during the current study are not publicly available due to confidentiality agreements with field operators but are available from the corresponding author on reasonable request. Synthetic and simulated data used for model validation were generated within the study and are available upon request.
References
Zheng, J., Lu, C. & Gao, L. Multi-objective cellular particle swarm optimization for wellbore trajectory design. Appl. Soft Comput. 77, 106–117 (2019).
Wang, W. et al. Interval Estimation of sensor fault in rotary steerable drilling tools based on set-membership approach. J. Process. Control 143.000 (2024).
Hanson, D. R. et al. Advanced techniques in site characterization and mining hazard detection for the underground coal industry. Int. J. Coal Geol. 50, 1–4 (2002).
Cao, X. et al. Three-dimensional geological modelling in earth science research: an in-depth review and perspective analysis. Minerals 14.7, 686. (2024).
Aregbe, A. G. Wellbore stability problems in deepwater gas wells. World J. Eng. Technol. 5 (04), 626 (2017).
Hu, D. et al. Spatio-temporal trajectory similarity measures: A comprehensive survey and quantitative study. IEEE Trans. Knowl. Data Eng. 36, 2191–2212 (2023).
Su, H. et al. A survey of trajectory distance measures and performance evaluation. VLDB J. 29 (1), 3–32 (2020).
Dagan, G. Models of groundwater flow in statistically homogeneous porous formations. Water Resour. Res. 15 (1), 47–63 (1979).
Strahler, A. N. Dynamic basis of geomorphology. Geol. Soc. Am. Bull. 63 (9), 923–938 (1952).
Nour, M., Elsayed, S. K. & Mahmoud, O. A supervised machine learning model to select a cost-effective directional drilling tool. Sci. Rep. 14 (1), 26624 (2024).
Dokhani, V., Bloys, B. & Mengjiao Yu, and A wellbore stability model for shale formations: accounting for strength anisotropy and fluid induced instability. J. Nat. Gas Sci. Eng. 32, 174–184 (2016).
Kanfar, M. F. & Chen, Z. Rahman. Risk-controlled wellbore stability analysis in anisotropic formations. J. Petrol. Sci. Eng. 134, 214–222 (2015).
Li, H. et al. Geomechanics and engineering evaluation of fractured oil and gas reservoirs: Progress and perspectives. Energies 18.10, 2623. (2025).
Gul, F. et al. A consolidated review of path planning and optimization techniques: Technical perspectives and future directions. Electronics 10.18, 2250. (2021).
Dixit, S. et al. Trajectory planning and tracking for autonomous overtaking: State-of-the-art and future prospects. Annu. Rev. Control. 45, 76–86 (2018).
Viswanathan, H. S. et al. From fluid flow to coupled processes in fractured rock: recent advances and new frontiers. Rev. Geophys. 60.1, e2021RG000744 (2022).
Jiang, J. & Yang, J. Coupled fluid flow and geomechanics modeling of stress-sensitive production behavior in fractured shale gas reservoirs. Int. J. Rock Mech. Min. Sci. 101, 1–12 (2018).
Pereira, J. L. et al. A review of multi-objective optimization: methods and algorithms in mechanical engineering problems. Arch. Comput. Methods Eng. 29 (4), 2285–2308 (2022).
Feng, Y. et al. Influence of geomechanics parameters on stress sensitivity in fractured reservoir. Front. Earth Sci. 11, 1134260 (2023).
Wei, L. I. et al. Research progress of rotary steerable system and its control methods. Coal Geol. Explor. 51 (10), 167–179 (2023).
Stevens, R. et al. Ai for science: Report on the department of energy (doe) town halls on artificial intelligence (ai) for science. No. ANL-20/17. Argonne National Lab.(ANL), Argonne, IL (United States), (2020).
Rolnick, D. et al. Tackling climate change with machine learning. ACM Comput. Surv. (CSUR). 55 (2), 1–96 (2022).
Eshiet, K. I. I. The performance of stochastic designs in wellbore drilling operations. Pet. Sci. 15 (2), 335–365 (2018).
Baouche, R., Sen, S. & Boutaleb, K. Present day in-situ stress magnitude and orientation of horizontal stress components in the Eastern illizi basin, algeria: A Geomechanical modeling. J. Struct. Geol. 132, 103975 (2020).
Wood, D. A. Constrained optimization assists deviated wellbore trajectory selection from families of quadratic and cubic Bezier curves. Gas Sci. Eng. 110, 204869 (2023).
Kanes, R. et al. Developing a framework for dynamic risk assessment using bayesian networks and reliability data. J. Loss Prev. Process Ind. 50, 142–153 (2017).
Van Loock, Wannes, G., Pipeleers & Swevers, J. B-spline parameterized optimal motion trajectories for robotic systems with guaranteed constraint satisfaction. Mech. Sci. 6 (2), 163–171 (2015).
Elbanhawi, M., Simic, M. & Reza Jazar. Randomized bidirectional B-spline parameterization motion planning. IEEE Trans. Intell. Transp. Syst. 17 (2), 406–419 (2015).
Tang, J., Liu, G. & Pan, Q. A review on representative swarm intelligence algorithms for solving optimization problems: applications and trends. IEEE/CAA J. Automatica Sinica. 8 (10), 1627–1643 (2021).
Yuan, M. et al. An improved online trajectory planner with stability-guaranteed critical test curve algorithm for generalized parametric constraints. IEEE/ASME Trans. Mechatron. 23 (5), 2459–2469 (2018).
Williams, G. J. J. et al. Top-down reservoir modelling. SPE Annual Technical Conference and Exhibition? (SPE, 2004).
Li, Z., Tang, L. & Jinsen Zhuang. Bounded intra-layer synchronization of multilayer heterogeneous networks without external controllers. Nonlinear Dyn. 112, 14497–14512 (2024).
Azike, O. Multi-well real-time 3D structural modeling and horizontal well placement: an innovative workflow for shale gas reservoirs. In SPE Eastern Regional Meeting. (SPE, 2011).
Liu, J. et al. 3D geomechanical modeling and numerical simulation of in-situ stress fields in shale reservoirs: a case study of the lower Cambrian Niutitang formation in the Cen’gong block, South China. Tectonophysics 712, 663–683. (2017).
Yong, R. et al. Complex in situ stress States in a deep shale gas reservoir in the Southern Sichuan Basin, china: from field stress measurements to in situ stress modeling. Mar. Pet. Geol. 141, 105702 (2022).
Kassner, M. E. et al. New directions in mechanics. Mech. Mater. 37, 2–3 (2005).
Wang, W. et al. Coal-and-gas outburst risk classification prediction based on the evolution of the entire space–Time stress field in mines: W. Natural Resour. Res. 1–18. (2025).
Liu, Q. et al. Instability mechanisms and Wellbore-Stabilizing drilling fluids for marine gas hydrate reservoirs: A review. Energies 18 (16), 4392 (2025).
Cao, J., Wiktorski, E. & Sui, D. Well trajectory optimization with an emphasis on Anticollision design. J. Offshore Mech. Arct. Eng. 144 (4), 044501 (2022).
Zhao, A. et al. Real-Time intelligent recognition and precise drilling in strongly heterogeneous formations based on Multi-Parameter logging while drilling and drilling engineering. Appl. Sci. 15, 5536 (2025).
Ma, T., Chen, P. & Zhao, J. Overview on vertical and directional drilling technologies for the exploration and exploitation of deep petroleum resources. Geomech. Geophys. Geo-Energy Geo-Resour. 2, 365–395 (2016).
Zhu, X. The effects of drill string impacts on wellbore stability. J. Petrol. Sci. Eng. 109, 217–229 (2013).
Hossain, M. M., Rahman, M. K. & Rahman, S. S. Hydraulic fracture initiation and propagation: roles of wellbore trajectory, perforation and stress regimes. J. Petrol. Sci. Eng. 27, 3–4 (2000).
Weijermars, R., Wang, J. & Pham, T. Borehole failure mechanisms in naturally fractured formations. Rock Mech. Rock Eng. 55, 3001–3022 (2022).
Chai, R. et al. Solving multiobjective constrained trajectory optimization problem by an extended evolutionary algorithm. IEEE Trans. Cybernetics. 50 (4), 1630–1643 (2018).
Hatamikia, S. et al. Source-detector trajectory optimization in cone-beam computed tomography: a comprehensive review on today’s state-of-the-art. Phys. Med. Biol. 67 (16), 16TR03 (2022).
Blajer, W. & Kołodziejczyk, K. A geometric approach to solving problems of control constraints: theory and a DAE framework. Multibody Sys.Dyn. 11 (4), 343–364 (2004).
Atashnezhad, A. et al. Designing and optimizing deviated wellbore trajectories using novel particle swarm algorithms. J. Nat. Gas Sci. Eng. 21, 1184–1204 (2014).
Malyuta, D. et al. Convex optimization for trajectory generation: A tutorial on generating dynamically feasible trajectories reliably and efficiently. IEEE Control Syst. Mag. 42 (5), 40–113 (2022).
Wang, L., Ling-po & Li An effective differential harmony search algorithm for the solving non-convex economic load dispatch problems. Int. J. Electr. Power Energy Syst. 44 (1), 832–843 (2013).
Bosman, Peter, A. N. On gradients and hybrid evolutionary algorithms for real-valued multiobjective optimization. IEEE Trans. Evol. Comput. 16 (1), 51–69 (2011).
Funding
This is a contribution to the project of Theory of Hydrocarbon Enrichment under Multi-Spheric Interactions of the Earth (Grant No. THEMSIE04010107).
Author information
Authors and Affiliations
Contributions
Shuai Guo. conceived the overall research framework, developed the integrated geological–geomechanical modeling approach, and drafted the main manuscript text.Zhikun Liu. supervised the project, guided the theoretical formulation, and revised the manuscript critically for intellectual content.Xinghua Su contributed to literature investigation, project coordination, and provided essential support in research funding acquisition. Yueyue Liu participated in background investigation, data collection coordination, and contributed to securing financial support for the project. Qi Li. implemented the numerical algorithms, performed the trajectory optimization experiments, and contributed to result visualization. Liupeng Wang. processed and standardized the multi-well logging and structural data, established the geological and geomechanical constraint models, and prepared Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13 and 14. Fengtao Qu. conducted the sensitivity and robustness analyses, contributed to comparative evaluations, and assisted in preparing Figs. 15, 16, 17, 18, 19, 20, 21, 22, 23 and 24. All authors discussed the results, reviewed the manuscript, and approved the final version.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Guo, S., Liu, Z., Su, X. et al. An integrated geomechanical–drill string trajectory optimization method for initial wellbore design. Sci Rep 16, 4146 (2026). https://doi.org/10.1038/s41598-025-34235-5
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-34235-5
